N022基于xPC目标的虚拟合并单元的构建
有限单元法第二版课程设计 (2)
有限单元法第二版课程设计一、设计背景有限单元法是一种常用的分析方法,广泛应用于工程学和自然科学领域。
为了进一步提高学生的有限单元法水平,本次课程设计旨在设计一个较为完整的有限单元方法分析项目。
二、设计目标通过本次课程设计,旨在让学生深入了解有限单元方法的原理和实现过程,提高学生的分析和解决实际问题的能力。
三、设计内容本次课程设计的主要内容包括以下三个部分:1.有限单元法的基础知识学习是本次课程设计的首要任务。
学生应该充分掌握有限单元法的基本原理、有限单元法的应用领域、有限单元法的基本步骤、有限单元法的精度等相关知识,为后续的分析工作奠定基础。
2.本次课程设计的重点是学生自行选择一个实际问题,并建立相应的有限单元模型,进行静态、动态或热力学分析。
学生应该根据具体情况选择不同的求解方法,如使用有限元软件求解或自编程求解。
3.在完成有限元分析后,学生应该对结果进行分析和讨论。
包括模型的合理性、分析结果的精度和可靠性等等,对分析结果进行进一步的解释和讨论。
四、设计要求1.本次课程设计应该由每个学生独立完成,不得相互抄袭和抄袭现成的模型。
2.学生自行选择并设计仿真模型,可以是自行查找的数据或者自己设计的模型。
3.分析结果应该以文本的方式进行输出,要求输出结果应该包括模型的详细说明、分析结果和分析结论等内容。
4.报告应该能够详细说明分析流程,从建模、求解到结果的呈现,必须清晰且易于理解。
5.学生应该按照教师要求的时间和形式,将完成的报告提交给教师评分。
五、总结有限单元法是一种重要的计算方法,对于提高学生的工程实践能力和实际应用技能有着重要的作用。
通过本次课程设计的学习,有助于学生深入理解有限单元法,将学校理论与实际问题相结合,为将来的工作打下坚实的基础。
基于路径依赖的可重构制造单元构建与布局研究
基于路径依赖的可重构制造单元构建与布局研究基于路径依赖的可重构制造单元构建与布局研究摘要:随着人工智能和自动化技术的不断发展,制造业正面临着生产方式的变革。
可重构制造单元(Reconfigurable Manufacturing Cell,简称RMC)作为一种新型的制造单元,具有可快速更换部件和工艺的特点,能够适应不同产品的生产需求。
本文通过对路径依赖理论的研究,探讨了基于路径依赖的可重构制造单元的构建与布局方法,并提出了相关的设计原则和策略。
1. 引言随着全球制造业的竞争日益激烈,传统的大规模生产模式已经不能满足市场对多样化和个性化产品的需求。
为了适应快速变化的市场需求,制造业需要寻找新的生产模式并引入新的制造技术。
可重构制造单元作为一种新型的制造单元,具备快速灵活的生产特性,已经成为制造业改进生产方式的重要研究领域。
2. 可重构制造单元的概念与特点可重构制造单元是一种灵活可变的制造单元,它能够通过快速更换部件和工艺来满足不同产品的生产需求。
它具有以下特点:1)模块化设计,能够方便地更换和组合不同部件;2)可编程控制,能够根据产品要求进行工艺变换;3)灵活适应,能够根据市场需求快速调整生产能力。
3. 路径依赖理论及其在制造单元布局中的应用路径依赖理论是一种描述过程中路径选择对结果产生影响的理论。
在制造单元的构建和布局中,路径依赖理论可以用来分析和解决以下问题:1)如何选择合适的工艺流程和布局方式;2)如何利用历史数据和经验知识进行决策;3)如何适应市场需求的变化。
4. 基于路径依赖的可重构制造单元构建与布局方法基于路径依赖的可重构制造单元构建与布局方法包括以下步骤:1)数据收集与分析,通过收集和分析历史数据和经验知识,评估不同工艺流程和布局方式的适应性;2)路径选择与优化,根据评估结果选择合适的路径和优化布局方式;3)系统改进与优化,不断改进系统性能和生产效率。
5. 设计原则和策略基于路径依赖的可重构制造单元的设计原则和策略包括以下方面:1)模块化设计,使得单元的部件可以方便地更换和组合;2)可编程控制,使得单元的工艺可以根据产品要求进行变换;3)灵活适应,使得单元可以根据市场需求调整生产能力;4)数据驱动,通过收集和分析数据来指导决策和改进。
导弹协同虚拟装配工艺规划系统
a s s e mb l y s i mu l a t i o n i n v i r t u a l e n v i r o n me n t i s p u t f o r wa r d .By u s i n g t h e mod e r n c o mp u t e r a n d n e t wo r k t e c h n o l o g y, a n d
b y t wo - d i me n s i o n a l d r a wi n g s a n d t e x t ,a n a s s e mb l y me t h o d c a l l e d a k i n d o f 3 D d i g i t a l a s s e mb l y p r o c e s s d e s i g n a n d
Ab s t r a c t :I n t h e mi s s i l e r e p a i r p r o c e s s , t o s o l v e t h e p r o b l e m o f c o mp l i c a t e d a s s e mb l y p r o c e s s whi c h c a n ’ t b e d e s c r i b e d
r e s u l t s s h o w t h a t : t h e mo d e l r e a l i z e s t h e t r a n s f o r ma t i o n f r o m 2 D t o 3 D d i g i t a l f o r t he mi s s i l e r e p a i r wo r k s h o p , a n d e n h a n c e s t h e r e p a i r c a p a c i t y u n d e r t h e c o n d i t i o n o f i n f o r ma t i o n . Ke y wo r d s :mi s s i l e ; v i r t u a l a s s e mb l y ; c o o pe r a t i o n ; p r o c e s s
情境感知中的XML信息融合方法
概率,减少低数据冗余,又能节省网络带宽。
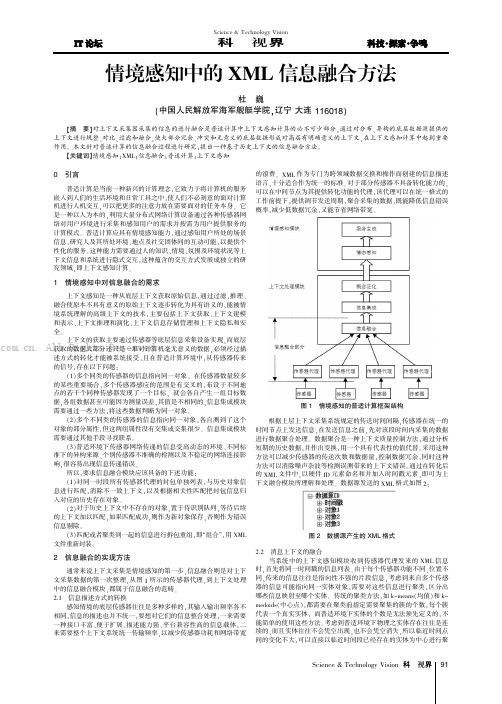
图1情境感知的普适计算框架结构
根据上层上下文采集系统规定的传送时间间隔,传感器在统一的时间节点上发送信息,在发送信息之前,先对该段时间内采集的数据进行数据聚合处理。
数据聚合是一种上下文质量控制方法,通过分析短期的历史数据,并作出变换,用一个具有代表性的值代替。
采用这种方法可以减少传感器的传送次数和数据量,控制数据冗余,同时这种方法可以消除噪声杂波等检测误测带来的上下文错误。
通过在转化后XML文件中,以硬件ID元素命名和并加入时间戳元素,即可为上下文融合模块所理解和处理。
数据源发送的XML格式如图2:
图2数据源产生的XML格式
消息上下文的融合
当系统中的上下文感知模块收到传感器代理发来的
首先将同一时间戳的信息列表。
由于每个传感器功能不同
传来的信息往往是指向性不强的片段信息,考虑到来自多个传感器的信息可能指向同一实体对象,需要对这些信息进行聚类
哪些信息映射至哪个实体。
传统的聚类方法,如k-means(
),都需要在聚类前指定需要聚集的簇的个数
代表一个真实实体,而普适环境下实体的个数是无法预先定义的
后的上下文更加贴近实体。
学生将来从事环境工程相关专业奠定扎实的制图基础。
企业流程体系构建及优化
诊断分析
第3步
To be未来 流程设计
第4步
试运行、修 订及发布
第5步
45
如何选择目标流程
挖掘业务改进诉求,帮助痛企点业解决敏实感际点业务问题! 断点 盲点
46
组建跨部门优化团队
哪些人应该参与流程优化团队? Project Sponsor 赞助者 Design Team 拥有者和业务专家 Facilitators 催化师
贯穿
我们如何为客户提供端 到端的全流程效劳?
集团管控模式
总部对分子公司的管控模式, 财务、战略或是运营管控?
优秀流程框架应承载企业核心管理要求!
17
如何进展流程体系规划 架构标准 分层定义 体系融合
18
通过分层分级的方式展现流程架构
……
体系结构视图 LEVEL-0视图
LEVEL-1视图 LEVEL-2视图
全球一体化
市场需求饱和
产品生命周期缩短
企业
客户要求提高
技术创新加快
产品价格下降 本钱压力上升
跨界竞争变多
Customer-客户要求更高 Competition-竞争更加充分,本钱压力更大 Change-变化更快
7
内因: 企业成长能力和战略转型需求
重新崛起 战略转型
管理转型
优化与再造
企业成长生命周期
企业流程体系构建及优化
目录
1. 提升流程建立准备度 2. 3. 流程体系规划 4.
流程详细设计
5.
一、如何正确理解流程
• 流程就是一组共同给客户创造价值的相互关联的活动进
程。
• 流程5个关键要素:SIPOC
我满意是因为流 程为我创造了 〔 价值 〕 〔活动 〕
高性能可重构乘加单元设计
大 众 科 技
DA ZHo NG J KE I
No. 2 0 2。 01
( u l i l N .2 ) C mu t eyபைடு நூலகம்o1 6 av
高性 能可 乘加单元设计 重构
顾 荣 荣
( 同济大学 ,上海 2 0 9 ) 002
【 关键词 】乘 累加 器;可重构 ;SMD;修正 b oh算法;华莱士树 I ot 【 中图分类号 】T 1 . N9 1 2 7 【 文献标识码 】A 【 文章编号 】10 — 1 1 0 o 2 0 2 — 3 0 8 15 ( 11 — 0 4 0 2 0
影 响 ,从 而 单 周 期 得 到 正 确 的 结 果 。针 对 性 能 要 求 比较 高 的
【 摘 要 】乘加 器是 多媒体数字信 号处理 器的关键 运算部件 ,支持 单指令 多数 据流 的乘加 单元结构能 显著增强 处理 器的 多 媒体数据 处理 能力。在定长的乘加器结构上做适 当改进 以支持 多种 向量模 式的乘累加 器,可在单周期 内完成 1 3 X3 i 路 2 2bt 、2 路 1 ×1 i、4 8 bt 6 6bt 路 8 i有符号/ , X 无符号数 乘 累加 。经功 能验证 和时序 分析 ,能较好地 满足应 用要 求。也可 以进一步流水线 化来满足 于对性能要求更 高的数 字信 号处理应 用。
1部分积 生成 . 对于一个普通N i 有符 号乘 法,中间过程会产 生N XNb t 个 部分积 。若采用修正B o h o t编码算 法 Ⅲ,每次交 叠检验三位 , 其部分积数 目可 以降低 至 ( + )/ N N 1 2( 为奇 数)或N 2 l( /+ N 为偶数 ),部分积数 目的减少能显著减 小芯片面积,降低硬 件复杂度 。修 正B o h o t 算法如式1 所示 。 假设A 是被乘数 ,B 乘数,P 是乘积 ,则有:
面向重构目标的控制系统可重构性
第39 卷第4 期2010 年8 月DOI:10.3724/SP.J.1219.2010.00391信息与控制Information and ControlVol.39, No.4Aug., 2010面向重构目标的控制系统可重构性关守平,杨飞生(东北大学信息科学与工程学院,辽宁沈阳110004)摘要:为了给可重构系统控制律重构综合提供设计依据,研究了线性化系统的控制可重构性分析问题.面向控制系统定义了5 个重构目标:稳定目标、定点恢复弱目标、轨迹恢复强目标、状态恢复直接目标和故障隐蔽目标.根据控制要求的强度,通过故障隐蔽目标,依次给出了线性闭环控制系统的稳定、弱重构、强重构和直接重构目标的可重构性条件.稳定(镇定)目标的重构条件主要从能控能观结构特性方面考虑,其它几个目标则以秩条件的形式给出.以一个线性MIMO 系统的例子来分析可重构性,验证了已得到的重构条件的正确性.关键词:重构目标;可重构性;能控能观结构分解;秩条件中图分类号:TP273 文献标识码:A 文章编号:1002-0411(2010)-04-0391-06 Reconfiguration-Goal-Oriented Control System ReconfigurabilityGUAN Shouping ,YANG Feisheng(College of Information Science and Engineering, Northeastern University, Shenyang 110004, China)Abstract: For the sake of providing design insights into the synthesis of controller reconfiguration for reconfigurable systems, control reconfigurability of linearized systems is analyzed. Oriented to control systems, five reconfiguration goals are identified, that is, stabilization goal, setpoint recovery weak reconfiguration goal, trajectory recovery strong reconfiguration goal, state restoration direct reconfiguration goal and fault-masking goal. According to the strength of control requirements, reconfigurability of stabilization, weak, strong, and direct goals via the fault-masking one for the closed-loop linear control system are presented respectively. With regard to the stabilization goal, controllability and observability structural propertiesare mainly considered, and reconfigurability conditions are given in the form of rank conditions for others. Reconfigurability analysis is illustrated by a linear multi-input multi-output (MIMO) system, validating the achieved reconfiguration conditions.Keywords: reconfiguration goal; reconfigurability; controllability and observability structural decomposition; rank condi- tion1引言(Introduction)控制系统重构实际上是一个系统的可重构控制器在线自动重新设计的过程[1 -2].在设计可重构系统时,需预先知道对哪些故障情况或哪些部件失效能够通过重构达到容错,因此就要对系统的控制可重构性进行分析,从而为控制律重构的综合设计提供依据.有关系统的控制可重构性的研究文献比较少.线性系统的可重构性很大程度上取决于系统的控制冗余.程一综述了提高闭环可靠性的重构、冗余和鲁棒性方式,对线性多变量系统执行器和传感器的功能冗余性提出了约旦标准形和“一般性”两种分析方法,并论述了功能冗余性在系统重构中的作用[3 - 4].Wu 和周克敏等首次研究了反馈控制的冗余水平的度量问题,针对线性时不变系统,将最小二阶模式作为控制可重构性的度量,以此反映不管采用被动还是主动控制策略,故障发生时过程对象允许性能恢复的能力[5].控制可重构性本质上度量了不利条件下被控过程剩余的能控性和能观性.Gehin 和Straoswiecki 使用一般元件模型进行可重构性分析,从系统部件所提供的服务和为达到特定目标而组织的操作模式方面描述系统[6].Sebek 等基于2-D 矩阵多项式方程给出了2-D 系统的局部可控性和因果可重构性的充要条件,因果可重构性等价于一个准确观测器的存在性[7].Kaczorek 扩展建立了2-D 线性系统一般奇异模型的局部能控性、可达性和可重构性的充要条件[8].文[9] 给出了一种引入新控制元件的平滑方法,通过终端连接保证了重构过渡基金项目:国家自然科学基金资助项目(60974070);辽宁省自然科学基金资助项目(20082026).通讯作者:杨飞生,*************************收稿/录用/修回:2009-09-25/2010-01-13/2010-06-13阶段的稳定性.以上文献主要从稳定角度考虑可重构性,稳定目标只要求重构回路是稳定的.由于控制重构的目标依原始控制器的目标而定,而单独的稳定目标不足以描述所有问题,并且实际应用中常需要将目标加强,例如要求重构后闭环输出能跟踪上重构前闭环的外部输出、重构前后闭环的外部输出尽可能一致、控制对象的状态受故障的影响尽量小等.因此,本文将定义5 个重构目标,研究采用主动控制策略时可重构性分析的方法,从不同角度出发,要求逐渐加强,依次给出1-D 线性系统的重构条件,从而丰富了控制系统可重构性分析的理论研究,也为实际的可重构系统设计提供了重要依据.2重构目标(Reconfiguration goals)标称对象的线性化模型为x˙= A x+ B u+ B d d,y = Cx 初始状态x0 、d、B d和C z 与标称对象相同.重构控制回路由故障对象模型、重构模块和标称控制器来定义,如图1 所示.一个标称控制回路的最普通的控制目标是镇定系统、达到一个稳态输出(定点跟踪)和跟随一个给定的轨迹(完美跟踪).这些目标也适用于故障控制回路,从而引出下面的重构目标.稳定目标:恢复标称控制回路的稳定性,弱重构目标为恢复输出平衡点,强重构目标为恢复系统的动态行为.z = C z x, x(0) = x0(1) 其中,x 是n 维对象状态;u 和d 分别为p 维控制输入和q 维干扰输入,y 和z 分别为r 维量测输出和t 维外部输出;系数矩阵由未线性化的系统函数平衡点处的雅可比矩阵定义.控制器为n c 维状态空间系统x˙c= A c x c + B c(w−yc)u c = C c x c + D c(w−yc) (2)x c(0) = 0设w 为v 维的参考输入.在标称控制回路中u = u c, yc= y (3) 从而得出闭环模型图 1 重构控制回路的目标Fig.1 Goals of the reconfigured control loop另给出两个与常规控制不同的目标的定义:直接重构目标,恢复对象的状态轨迹;故障隐蔽目标,从控制器一侧隐藏故障.假设重构控制回路的极点是σ(A fs),其中A fs 是由故障对象、重构模块和标称控制器组成回路的系d x xB D c B d统矩阵.一般重构问题定义的5 个重构目标也适用d tc = Asx c+B cw+ d于线性重构问题.稳定目标稳定目标要求重构回路是稳定的.y = Cx, z = C z x, A s = A−B D c BC c−B c C A c(4)一个线性系统简单的稳定性判据是所有极点必须位于复平面的左半部分.此处使用这个标准的一个条件更强的D 稳定变体,要求极点位于一个设计集合参考信号馈入控制器的这种方式可能是限制性的,但这种假定结构仍不失一般性.因为向量yc可由额外的零子向量扩展,以使对于此子向量相减的C D:其中C Dσ(A fs) ⊂C D (6) 是C−的一个子集,C 表示复数域集合.此结果只依赖于参考输入w.故障对象的模型以同样方式线性化:x˙f= A f x f + B f u f+ B d d,yf= C f x f z f = C z x f,x f(0) = x0(5)标准考虑到像相位裕度和调节时间等额外要求的陈述.弱重构目标弱重构目标需要重构回路的外部输出静态情形与标称回路的输出匹配.标称回路从x两个输入 u 与 d 到输出 y 的传递函数 G 和重构回路 的 G r 可以表示为故障而改变,所以这个问题可解的一个充要条件是 故障对象的所有不能控极点位于 C D 内.U (s ) U c (s )定义:对于上述的线性化系统,有:Y (s ) = G (s )D (s ), Y c (s ) = G r (s ) D (s ) (1) 若系统能控,即能控对 (A , B ) 满秩,执行器 失效后故障系统仍是能控的,即能控对 (A , B f ) 满秩, 为了满足弱目标,两者静态时应相等:G (0) − G r (0) = 0(7)强重构目标 强目标要求重构回路的外部行为 与标称回路的行为精确匹配.对于传递函数来讲,有则称该执行器对本系统是能控冗余的.(2) 若系统是能镇定的,系统的不能控部分是渐 近稳定的,执行器失效后故障系统仍是能镇定的, 则称该执行器对系统是能镇定冗余的.(3) 若系统能观,即能观对 (A , C ) 满秩,传感器 失效后故障系统仍能观,即能观对 (A , C f ) 满秩,则 ∀s : G (s ) = G r (s )(8)这个目标导出了最复杂的解.直接重构目标 这个目标要求对象的状态受到 故障的影响尽可能地小.如果对于所有的 w 、x 0 和 d ,有∀t : x f (t ) = x (t )(9)则直接重构目标得到满足.故障隐蔽目标 最后的故障隐蔽目标是一个技 术目标,引进它是为从控制器视角定义重构模块的 行为.此目标对对象侧回路无影响,因此它不限制 重构问题的可解性.然而,它有助于限制资格解的 重构模块集.这个目标要求控制器视角侧不受故障影响.若 标称控制和重构控制回路的控制器输入相同,那么 对于所有 w 和 x 0(但无 d ),有∀t : y c (t ) = y (t )(10)这可由控制器的能观测极点不受故障影响的事 实直接得到.引理 1:假设初始状态 x = x f = x 0 = 0 是一个平 衡点,所以没有自由运动.那么,如果被重构对象与 标称对象具有相同的输入/输出行为,则故障隐蔽 目标得到满足.证明:此引理可通过一个简单的系统理论分析 得出.标称和重构控制环两者都分别由两部分组成: 控制器(两种情况相同)和标称对象或被重构对象. 由假设可以得出两个控制器和对象的开环链在输称该传感器对本系统是能观冗余的.(4) 若系统是能检测的,即系统不能观部分是渐 近稳定的,传感器失效后故障系统仍是能检测的, 则称该传感器对系统是能检测冗余的.命题 1:若执行器对系统是能控冗余的,则系统 对该执行器失效可重构;若执行器对系统是能镇定 冗余的,则系统对执行器失效是稳定意义上可重构 的.命题 2:若传感器对系统是能观冗余的,则系统 对该传感器失效可重构;若传感器对系统是能检测 冗余的,则系统对传感器失效稳定意义可重构.命题 3:若系统的能控冗余度为 k ,则对任意的 k 个执行器失效,系统是完全可重构的;若系统的能 镇定冗余度为 k ,则对任意的 k 个执行器失效,系统 是稳定意义上可重构的.命题 4:若系统的能观冗余度为 k ,则对任意的 k 个传感器失效,系统是完全可重构的;若系统的能 检测冗余度为 k ,则对任意的 k 个传感器失效,系统 是稳定意义上可重构的.基于上面的定义与命题,下面提出一种可用于 线性系统的可重构性分析方法.设R = rank (B f , A A B B f, · · · , A n −1 B f ) (11)1) 若 R = n ,则 (A , B f ) 完全能控,B f 是可重构 的;2) 若 R < n ,则对 (A , B f ) 作能控性结构分解 入/输出行为上相同.因此,两个闭环系统表现出相x˙fc11 A ¯ 12 x fc f1 同的行为,包括相同的输出.3 可重构性分析(Reconfigurability analy-sis )x ˙ fc¯ = 0 A ¯ 22xfc x fc¯ + 0 u f(12)3.1 基于稳定目标的可重构性分析如果故障对象包含 C D 外的固定极点,稳定目 y f = .C ¯ 1 C¯ 2. x fc¯(13) 标明显不能达到.因为对象的能观测性不因执行器得到能控部分 A ¯ 11 和不能控部分 A ¯ 22,能控部分 A ¯ B ¯−的极点可以通过引入状态反馈阵或输出反馈阵而任意配置;不能控部分则不能配置,但只要 A ¯ 22 的极点 如果故障对象的解空间包含标称对象的解空 间,即位于复数域左半平面内,总能找到一个反馈使得故A B fA B f B 障系统状态渐近稳定于标称系统状态的镇定器,此 时 B f 是稳定意义上可重构的.如果 A ¯22 至少有一个 rankC z0 = rankC z0 0(18)极点位于复数域右半平面,就不存在使故障系统状态渐近稳定于标称系统状态的镇定器,这时 B f 不具 有可重构性.同理,由于非奇异线性变换不改变系统的能控 能观特性,根据对偶性,传感器故障可作能观性结 构分解进行分析,也可对其对偶系统作能控性标准 结构分解;执行器和传感器故障并存时,作能控能 观性结构规范分解进行可重构性分析.分解时也可先把待分解的系统化为约旦标准 型,然后按约旦标准型的能控判别法则和能观判别 法则,判别各状态变量的能控性和能观性,最后按 能控能观、能控不能观、不能控能观、不能控不能观 四种类型分类排列,即可组成相应的子系统,进而 考察系统的可重构性.因此,以下假设有执行器故障的对象为则弱重构目标可以达到.3.3 基于强重构目标的可重构性条件两个主要方面必须考虑:输出轨迹 z f 的恢复和 重构控制回路的稳定性.z f = z将标称控制回路与重构控制回路进行比较可定义 重构问题如图 2.由于很难分析控制回路的可解性, 因此应用满足故障隐蔽目标的引理 1:若被重构对 象(故障对象加重构模块)的行为等于标称对象的 行为,则故障隐蔽目标满足,并且控制器的所有信 号不受故障影响.x ˙f = A x f + B f u f y f = Cx f , z f = C z x f (14)x f (0) = x 03.2 基于弱重构目标的可重构性条件对于常值干扰和输入,输出 z f 的稳态值要能恢 复到其标称值:lim (z (t ) z f (t )) = 0t →∞用在向量上方加上划线来标示该向量的静态 值,重写此条件:z ¯ = z ¯f显然弱重构目标的可解性由故障对象可能的平衡状态集和最终稳态输出决定.它们由 x ˙¯f = 0 定义,即0 = Ax ¯f + B f u ¯ f图 2 面向强重构目标的标称系统和故障系统 Fig.2 Nominal and faulty systems oriented to the strongreconfiguration goal为达到强重构目标,必须存在传递函数 H (s ), 满足 H (s ) 与故障对象 G f (s ) 串联后与标称对象 G (s ) 有相同的动力学行为特性这一条件:∃H (s ) : G (s ) = G f (s )H (s )G (s ) = C z (sII − A )−1 B ,G f (s ) = C z (sII − A )−1 B f因为这个 H (s ) 是所要求的重构模块,所以它也 必须是一个真有理矩阵传递函数.这里只考虑一个 z ¯f = C z x ¯f(15)必要条件:一个有理(但不一定真实)解 H (s ) 存在, 如果为进一步分析,假设系统在 0 处无相消零点:A rank (A ,B f ) = rankC z那么 z f 的解空间维数为A B f = n (16) ∀s : rank (G f (s )) = rank (G (s ), G f (s ))(19)稳定目标要求被重构对象 G f (s )H (s ) 是能镇定 的,对此给出几个必要条件.很明显 H (s ) 和 G f (s ) 必须能镇定;此外,G f (s ) 没有不存在于 G (s ) 中的不 稳定零点或极点,否则因为这些不稳定零极点将不 得不由 H (s ) 的不稳定极点和零点抵消,从而会导致 rankC z 0−n (17)出现隐藏的不稳定极点.i f f f f f f 3.4 基于直接重构目标的可重构性研究 首先给出控制量之间重构的一个必要条件. 定理 1 设控制量 u i (对应 B 的 b i 列)完全失 4 数值举例(Numerical example )执行器故障的二阶二入二出标称过程对象相关矩阵如下:效,u j 是用于重构的新控制量,则u i 可用 u j 进行广 义逆重构的条件是 b T b j ƒ= 0.0.25 0 1 −0.5i证明:若不满足 b T b j ƒ= 0,u i 与 u j 一定正交,被A = −0.25 −0.25, B = 0 0.5u i 控制的模态必不受 u j 控制,即 (A , b i ) 不完全能 控,u j 不能作为 u i 的控制冗余. 应用故障隐蔽目标引理 1,假设标称控制器的 1 0 C =0 1,C z = (0, 1)输出 u 和重构控制器的输出 u c 相等.若式 (9) 在此 假设下得到满足,标称对象状态和故障对象状态无 差别.因此,故障不影响控制器——相同的信号 y 或 y c 提供给标称和重构回路.由于相同的控制器用 于两种情形,控制器的输出 u 和 u c 也是相等的,开 始的假设因此成立,直接重构目标和故障隐蔽目标 第二个执行器失效,由下面的输入矩阵描述:1 0B f =0 0标称控制器由无状态的静态反馈阵给出,D c = diag (3, 10),即式 (2) 中的 A c , B c , C c 消失.故期望 同时得到满足.对式 (9) 求导得 的标称闭环极点为 −2.75 和 −5.75.考虑到调节时x ˙f = x ˙因此,满足此目标的充分必要条件是B f u f = B B u u (20)假设输入向量事先未知,一个对于所有输入都 成立的一般解必须能找到.引理 2 矩阵方程 SX = T 有解的充要条件是 间,D 稳定域选为 C D = [−1, −20],系统在此区间是 足够快的.此系统虽较简单,但可充分说明有关重构的相应效果并验证了已获得的重构条件.对系统能控能 观特性分析可知,它满足可重构性的稳定目标,可 由极点配置来镇定系统.应用秩条件式 (18) 得知系 统也能达到输出稳态值恢复的弱重构目标,可采用 零点配置重构方法消除稳态误差.对于强重构目标, 系统满足式 (19) 等必要条件,且该重构问题可解释 秩 rank (S ) = rank (S , T ).为图 2 中 u c 为干扰的扰动解耦问题.由线性方程组有解的充要条件推广,将 S 和 T 按列分块,易证引理 2.为节省篇幅起见,证略. 而 对 直 接 目 标 判 断 秩 条 件 得 rank (B f ) = 1, rank (B , B ) = 2,即 rank (B , B ) ƒ= rank (B ),不满足f f f 定理 2 直接目标下可重构性的几个等价条件 如下:(1) im (B ) ⊆ im (B f ), im (B ) = {B B u u |u ∈ R p }; (2) rank (B f , B ) = rank (B f ) = rank (B f B T ); (3) rank (B ) ™ rank (B f ) = rank (B T B f ); (4) rank (B ) = r ank (B f ).证明:由矩阵论可知,B f u f = B B u u 有解的充要条 件是条件 (1) 的列空间或象 im (B ) ⊆ im (B f );即 B 的 p 个列可以由 B f 的 p 个列向量组线性表示,由引 理 2 知 rank (B f ) = rank (B f , B ).又可知方程组 Sx = 0 与 (S T S )x = 0 同解,因此 rank (B T B f ) = rank (B f ) = rank (B T ),故有等价条件 (2)rank (B f , B ) = rank (B f ) = rank (B f B T );故有等价条件 (3)rank (B ) ™ rank (B f ) = rank (B T B f );因为 B f 是将 B 中的某一列或某些列 置零得到,有 rank (B ) “ rank (B f ),故得等价条件 (4) rank (B ) = rank (B f ).证毕.直接目标的可重构性条件,因此也就不能对该系统 进行基本伪逆法重构设计.5 结语(Conclusion )本文主要研究了线性控制系统的可重构性.首 先定义了 5 个重构目标,在故障隐蔽目标基础上, 按照由弱到强的程度针对其它各种目标给出了相应 的可重构性条件.数值举例应用这些条件进行了可 重构性分析的验证,为可重构系统综合设计提供重 要基础. 控制可重构性揭示了被控对象模型能够进行重 构控制设计的潜力和极限,应用可重构性条件便于 重构控制的分析与综合.重构问题的可解性依赖于 解析冗余的存在性.在精确的跟踪性能恢复重构条 件不能满足时,标称闭环控制系统性能如何以准最 优方式恢复的多目标优化重构是下一步需要研究的 主要问题.另一方面,为了给一般非线性系统的控制重构综合提供一定的设计依据,非线性控制系统的可重构性分析值得进一步探究.参考文献(References)[1] Richter J H, Weiland S, Heemels W P M H, et al. Decoupling-based reconfigurable control of linear systems after actuator faults[C]//10th European Control Conference. 2009: 2512- 2517.[2] Richter J H, Lunze J. H∞-based virtual actuator synthesis for op-timal trajectory recovery[C]//7th IFAC Symposium. Piscataway, NJ, USA: IEEE, 2009: 1587-1592.[3] 程一.线性多变量系统执行器和传感器的功能冗余性分析[J].信息与控制,1990, 19(1): 12-17.Cheng Yi. Function redundancy analysis on actuator and sen- sor of linear multivariable system[J]. Information and Control, 1990, 19(1): 12-17.[4] 程一.提高闭环控制系统的可靠性——重构、冗余、鲁棒性问题综述[J].控制与决策,1989, 4(5): 57-64.Cheng Yi. Reliability improvement of the closed-loop system – A survey on reconfiguration, redundancy and robustness[J].Control and Decision, 1989, 4(5): 57-64.[5] Wu N E, Zhou K, Salomon G. Control reconfigurability of LTIsystems[J]. Automatica, 2000, 36(3): 1767-1771.[6] Gehin A L, Staroswiecki M. Reconfiguration analysis usinggeneric component models[J]. IEEE Transactions on Systems,Man and Cybernetics: Part A, 2008, 38(3): 575-583.[7] Sebek M, Bisiacco M, Fornasini E. Controllability and recon-structibility conditions for 2-D systems[J]. IEEE Transactionson Automatic Control, 1988, 33(5): 496-499.[8] Kaczorek T. Local controllability, reachability, and recon-structibility of the general singular model of 2-D systems[J].IEEE Transactions on Automatic Control, 1992, 37(10): 1527-1530.[9] Trangbaek K, Stoustrup J, Bendtsen J. Stable controller recon-figuration through terminal connections[C]//17th IFAC WorldCongress. Piscataway, NJ, USA: IEEE, 2008: 331-335.作者简介:关守平(1965 –),男,博士,教授.研究领域为过程优化控制,精密检测与控制.杨飞生(1984 –),男,博士生.研究领域为控制系统重构与智能自修复技术.(上接第390 页)[6] Madavan N K. Multiobjective optimization using a Paretodifferential evolution approach[C]//Congress on Evolutionary Computation: vol.2. Piscataway, NJ, USA: IEEE, 2002: 1145- 1150.[7] Ziegler J G, Nichols N B. Optimum settings for automaticcontrollers[J]. Journal of Dynamic Systems, Measurement, and Control, 1993, 115(2B): 220-222.[8] 朱学军,陈彤,薛量,等.多个体参与交叉的Pareto 多目标遗传算法[J].电子学报,2001, 29(1): 106-109.Zhu Xuejun, Chen Tong, Xue Liang, et al. Pareto multiobjec- tive genetic algorithm with multiple chromosomes crossover[J].Chinese Journal of Electronics, 2001, 29(1): 106-109.[9] Deb K, Pratap A, Agarwal S, et al. A fast and elitist multiob-jective genetic algorithm: NSGA-II[J]. IEEE Transactions on Evolutionary Computation, 2002, 6(2): 182-197.[10] Yuwana M, Seborg D E. A new method for on-line controllertuning[J]. AIChE Journal, 1982, 28(3): 434-440. [11] Zitzler E, Deb K, Thiele L. Comparison of multiobjective evo-lutionary algorithms: Empirical results[J]. Evolutionary Com- putation, 2000, 8(2): 173-195.[12] Coello C A, Sierra M R. A coevolutionary multi-objectiveevolutionary algorithm[C]//Congress on Evolutionary Compu- tation: vol.1. Piscataway, NJ, USA: IEEE, 2003: 482-489. [13] 陈来九.热工过程自动调节原理和应用[M].北京:水利水电出版社,1982.Chen Laijiu. Principles of thermal process automatic adjustment and application[M]. Beijing: China Water Power Press, 1982.作者简介:刘楠楠(1983 –),女,硕士.研究领域为智能算法,多目标优化.石玉(1973 –),女,博士,讲师.研究领域为智能算法,多目标优化.范胜辉(1983 –)男,硕士生.研究领域为智能算法,多目标优化.。
体系结构及DoDAF综述

SvcV-3b:服务-服务矩阵 SvcV-4:服务功能描述 SvcV-5:作战活动-服务跟踪矩 阵 SvcV-6:服务资源流矩阵 SvcV-7:服务度量矩阵 SvcV-8:服务演进描述
SvcV-9:服务技术和技能预测
SvcV-10a:服务规则模型
对服务、服务项及其相互关系的确定。
作战视点OV
OV-1:高层作战概念图 0V-2:作战资源流描述 0V-3:作战资源流矩阵 0V-4:组织机构关系图 0V-5a:作战活动分解树 0V-5b:作战活动模型 OV-6a:作战规则模型 0V-6b:作战状态转换模型 OV-6c:作战事件跟踪描述
用图形或文本描述的高层作战概念。
描述作战活动之间交换的资源流。
对服务之间交换的资源流的描述。 描述系统和服务之间的支持关系,即一个服务由哪些系统来提供,一个 系统提供哪些服务。
描述服务之间的关系,如服务之间的接口、规划的与现有的接口的对比。
描述服务的功能和提供服务时所需的数据流。 描述服务与作战活动之间的支持关系,即一个作战活动由哪些服务来支 持,一个服务可以支持哪些作战活动。
• CV为体系结构描述中阐述的能力提供了战略背景 和相应的高层范围,比作战概念图中定义的基于 想定的范围更全面。
• 这些模型是高层的,用决策者易于理解的术语来 描述能力,以便沟通能力演进方面战略构想。
能力视点CV
CV-1:能力愿景 CV-2:能力分类 CV-3:能力阶段 CV-4:能力依赖
军事转型的总体构想,提供所描述能力的战略背景和高层 范围。
活动模型 系统功能
能力
图形示意
参考模型
融合产品
功能
活动
数据
业务规则
体系结构信息
混合单元选择语音合成系统的目标代价构建
混合单元选择语音合成系统的目标代价构建
蔡文彬;魏云龙;徐海华;潘林
【期刊名称】《计算机工程与应用》
【年(卷),期】2018(054)024
【摘要】合成语音的基元是通过最小化目标代价和拼接代价来选取.由于拼接基元涉及复杂的语言学、声学特性,如何选择能准确描述基元信息的声学特征(或语言学特征)并构建相应目标代价是提高合成语音质量的关键.从声学特征和声学模型两个方面对目标代价构建进行了探究.实验结果表明,经过相似语料训练后微调的深度声学网络模型,预测的瓶颈特征更能表征拼接基元特性,从而指导目标代价筛选理想候选单元,提高合成语音的质量.
【总页数】6页(P20-25)
【作者】蔡文彬;魏云龙;徐海华;潘林
【作者单位】福州大学物理与信息工程学院,福州 350108;福州大学物理与信息工程学院,福州 350108;南洋理工大学 Temasek实验室,新加坡 639798;福州大学物理与信息工程学院,福州 350108
【正文语种】中文
【中图分类】TP391
【相关文献】
1.语音合成系统中语音库样本能量均衡方法研究 [J], 刘伟;谢建志
2.英语语音合成系统超前端文本分析知识库的构建 [J], 马立东
3.基于双层码本的语音驱动视觉语音合成系统 [J], 贾熹滨;尹宝才;孙艳丰
4.嵌入式语音合成系统中不定长单元技术 [J], 朱秀红;于振华;王煦法
5.一种实用的语音合成系统:GIT语音合成系统 [J], 黎伟峰
因版权原因,仅展示原文概要,查看原文内容请购买。
2011年国家自然基金获得者名录——南京理工大学
N路信号的M路压缩采样(M<N) 席峰 基于空谱联合稀疏性的高光谱解混理论与算法 吴泽彬 基于北斗卫星信号的外辐射源多目标定位跟踪方法研究 吴盘龙 动态信号监测的无线传感器网络压缩采样方法研究 吴键 非稳定条件下的移相干涉测试理论与技术研究 乌兰图雅 大型螺纹高速硬旋铣动态响应特性及精密成形工艺研究 王禹林 简便参与物联网环境中的数据质量保证关键机理研究 王永利 单件订单接受和加工调度优化决策问题研究 王秀利 基于目的域的命中及毁伤的时空特性分析 王军 镁合金中孪生的晶粒尺寸效应及屈服机制转变研究 王经涛 第五届剧烈塑性变形纳米材料国际会议 王经涛 毫米波封装系统中高效、高精度的滤波器建模方法研究 王建朋 不确定多体系统动力学分析新方法 王国平 高冲击载荷作用下长行程多级独立式磁流变减振器特性和控制方法研究 王炅 重型机床滚滑复合导轨载荷分配机理与动态特性优化研究 汪振华 石墨烯-磁性尖晶石半导体复合物的结构及其可见光催化性能 汪信 一种新型用于miRNA检测的纳米放大电化学生物传感器的设计与性能研究 万莹 信息未确知的制造网格服务性能预测及执行决策方法研究 童一飞 国际机械工程与力学会议 滕燕 基于社会媒体信息挖掘的图像语义理解关键技术研究 唐金辉 可注射型水凝胶支架的合成及其在脂肪再生中的应用 谈华平 末段简易修正模式分析方法及控制效能研究 孙瑞胜 考虑需求信息删失的供应链动态库存控制策略研究 宋华明 含能材料粉尘燃爆机理的实验和理论研究 饶国宁 基于生物传热机理的人体内异常热源长波红外透视成像基础研究 屈惠明 过渡金属氧化物在ZSM-5表面双酸活性位形成及对低温脱硝中间体演变影响 曲虹霞 非等熵可压缩Navier-Stokes方程解的大时间行为 秦晓红 先验建模与非均匀性校正关系研究 钱惟贤 不完全量测下的随机穿越估计问题研究 戚国庆 应用于高速运动目标的高速三维重构技术研究 罗红娥
基于特征的典型CAD_CAPP_CAM集成系统
"
图.
工艺系统信息模型
毛坯模型由毛坯 #/0 系统提供。系统建立了典型毛坯三 维参数化图形库, 通过选择相应的毛坯模型, 输入参数值后系统 自动生成毛坯模型。 夹具模型由夹具设计子系统提供, 该系统通过调用夹具元 件库中的夹具三维参数化模型, 组装成所需的夹具, 并作为组件 装配到工艺系统信息模型中。 机床模型在 234$#56 系统中建立, 通过预先定义好的机床 基础件和运动部件组装成机床模型, 并建立其相应的控制系统, 形成机床模型存入机床库, 供以后调用。
大模型时代的基础架构读书笔记

《大模型时代的基础架构》读书笔记目录一、内容描述 (2)二、大模型时代的挑战与机遇 (3)2.1 大模型带来的挑战 (5)2.1.1 计算资源的限制 (6)2.1.2 数据隐私与安全问题 (7)2.1.3 模型可解释性与透明度 (9)2.2 大模型带来的机遇 (10)2.2.1 新算法与新架构的出现 (11)2.2.2 跨领域合作与创新 (12)三、大模型时代的基础架构 (14)3.1 硬件架构 (15)3.1.1 GPU与TPU的发展与应用 (16)3.1.2 其他硬件技术的发展 (18)3.2 软件架构 (19)3.2.1 深度学习框架的功能与特点 (21)3.2.2 软件架构的可扩展性与灵活性 (22)3.3 优化与加速 (23)3.3.1 模型压缩技术 (24)3.3.2 知识蒸馏技术 (26)四、大模型时代的基础架构发展趋势 (27)4.1 技术融合与创新 (28)4.1.1 硬件与软件的融合 (29)4.1.2 多种技术的综合应用 (31)4.2 用户需求与市场导向 (32)4.2.1 用户需求的变化 (34)4.2.2 市场导向的影响 (35)五、结论 (37)一、内容描述《大模型时代的基础架构》是一本关于人工智能和深度学习领域的重要著作,作者通过对当前最先进的技术和方法的深入剖析,为我们揭示了大模型时代下的基础架构设计原则和实践经验。
本书共分为四个部分,分别从基础架构的概念、技术选型、部署和管理以及未来发展趋势等方面进行了全面阐述。
在第一部分中,作者首先介绍了基础架构的概念,包括什么是基础架构、为什么需要基础架构以及基础架构的主要组成部分等。
作者对当前主流的基础架构技术进行了简要梳理,包括云计算、分布式计算、容器化、微服务等。
通过对比分析各种技术的优缺点,作者为读者提供了一个清晰的技术选型参考。
第二部分主要围绕技术选型展开,作者详细介绍了如何根据项目需求和业务场景选择合适的基础架构技术。
基于模型的系统工程与虚拟铁鸟解决方案_程磊

受控对象的耦合成为开发的关键之 计算环境、模型和数据的管理。LMS
程磊 毕业于清华大学动力学与控制专
业,研究方向是车辆、航天飞行器的动 力学分析与控制。现担任 L M S 国际公 司 联 合 仿 真 技 术 经 理,主 要 负 责 L M S 公司一维仿真平台与三维仿真平台结 合的机电系统多学科仿真平台技术研 究、服务支持和工程咨询项目,在仿真 平台的应用和实施、工程咨询等方面开 展了卓有成效的工作。
通过逻辑控制的设置和定义,像真实 硬件在环仿真的应用实例。
的物理试验一样,选择不同的试验模
“虚拟铁鸟”是全新的整机级系
式和试验工况,如起飞、平飞、降落、 统集成与全机数字建模技术方案,
滑行以及复杂的失效工况。“虚拟铁 “虚拟铁鸟”平台的建立,能够有效
鸟”一方面可以支持整机系统集成 地改进现有设计流程,尤其是系统集
的工况设定,驱动仿真并对结果进行
后处理的综合环境。
同时,LMS 为 MBSE 工程中所涉
及的控制系统开发提供包括控制开
发流程建立、控制软件开发、V&V、C
代码的移植(LCM)在内的相关工程
咨询服务及相关工具。
“虚拟铁鸟”的实现不仅仅需要
合适的、现成的软件平台作为支撑,
更需要由具备实施经验的技术供应
商 与 用 户 合 作 进 行 项 目 实 施 工 作,
LMS 公司愿与国内广大航空用户一
道,借鉴国外同行的实施经验,逐步
基于人工智能面向虚拟现实的快速模型构建方法和装置[发明专利]
![基于人工智能面向虚拟现实的快速模型构建方法和装置[发明专利]](https://img.taocdn.com/s3/m/f71bd227cd1755270722192e453610661fd95a57.png)
专利名称:基于人工智能面向虚拟现实的快速模型构建方法和装置
专利类型:发明专利
发明人:周帜,靳聪,陈小森,赵薇,迟绍翠,李中仝,侯聪聪,孙圆圆,李高玲
申请号:CN201810293160.8
申请日:20180403
公开号:CN108597025B
公开日:
20220503
专利内容由知识产权出版社提供
摘要:本发明提供了基于人工智能面向虚拟现实的快速模型构建方法和装置,包括:获取基础模型组件的三维结构数据信息;根据基础模型组件的三维结构数据信息构建领域基础组件模型库;根据领域基础组件模型库构建领域虚拟现实基础模型;根据领域虚拟现实基础模型构建领域虚拟现实模型,构建可以复用的结构化模型组件,再以快速的模型变形方法为不同类型应用领域快速构建所需的模型,从而节约设计时间。
申请人:中国传媒大学
地址:100000 北京市朝阳区定福庄东街1号
国籍:CN
代理机构:北京超凡志成知识产权代理事务所(普通合伙)
代理人:邓超
更多信息请下载全文后查看。
211287311_基于大数据技术的青少年心理健康评测动态模型构建研究
- 25 -信 息 技 术0 引言当前影响青少年心理健康的因素日渐增多,包括家庭、学习、工作等,青少年的心理健康异常逐渐成为相关学术界热烈讨论的话题[1]。
在国内经济及技术高速发展的大环境下,社会发展对新一代青少年体能和智力的要求越来越高,青少年需要面临的学习强度和工作压力越来越大,不可避免地会在心理上产生较大落差,进而使青少年的心理健康受到严重影响[2]。
但往往青少年心理出现问题的时机是无法预知的,只有在产生某些影响后才会意识到问题的严重性,既耗费人力、物力,又会产生巨大的时间成本[3]。
因此研究一种可获取青少年心理健康情况的方式、方法尤为重要[4]。
该文基于大数据技术研究青少年心理健康评测的动态模型,模型的构建涉及心理健康数据采集与整理、确立动态模型评估指标、测算心理健康评测数据以及获取心理健康评测结果,可使用不同算法将不同类型的心理健康数据进行分布计算,以数据信息的健康评测作为成果输出,据此全面了解青少年的心理动态,并进行更准确的心理健康预测。
1 数据采集及整理1.1 数据采集当前采集大数据的常用工具主要有Flume 、Logstash 和Kibana 等[5]。
基于大数据多样性的特点,使用特定的工具可将可靠性数据高速并发地进行采集、整合。
大数据采集技术主要是完成对已收录数据的分辨、筛选以及归类等操作,解决数据来源参差不齐等关键问题。
该文的研究将通过构建大数据网络流量资源聚合数学模型的方式进行数据采集。
其中包括构建大数据网络流量资源池与青少年基本信息管理模块,将大数据网络流量作为数据整合平台,供使用者自行选择测试方向。
在测试人员确定测试方式后,初始数据库可将对应的测试题目展示给测评人员,令其可以自行选择试题的呈现形式,完成答题后进行相应的评测结果分析,以此完成青少年心理健康评测。
数学模型的输入量选择的是围绕场景分析的VIRE 计算方法,这种方法可将数据梳理过程全面优化。
VIRE 算法的核心思路是在拟定的数据采集范围内设置不同参考标签进行计算,和其他实际参考标签种类相比,其效用性和精准度更高。
可变单元c-neb方法 -回复
可变单元c-neb方法-回复什么是可变单元cneb方法?可变单元cneb方法(Constrained Natural Extensional Basis, CNEB)是一种计算化学方法,用于研究分子和化学反应的势能面。
在化学反应中,分子会从一个能量极小值的构象转变为另一个能量极小值构象,这种转变称为化学反应路径。
CNEB方法可以用于确定最小能量路径,同时还能够研究该路径上的过渡态以及反应的动力学性质。
CNEB方法的基本原理是通过过渡态理论和多体势能外推法来构建势能面。
过渡态理论指的是研究化学反应路径中过渡态(transition state)的理论,通过确定过渡态的几何结构和能量来描绘反应的进程。
而多体势能外推法是一种根据已知构象和势能计算其他构象的方法。
CNEB方法将这两种方法结合起来,先通过过渡态理论确定反应路径上的过渡态,并通过势能表面外推计算路径上的其他构象。
CNEB方法的关键步骤包括以下几个:1. 选择初始构象:首先需要选择一个初始构象作为化学反应路径的起点。
这通常可以通过分子力学或量子化学计算得到。
2. 猜测中间构象:根据初始构象和目标构象,通过给定的方法猜测中间构象。
这些中间构象作为过渡态的候选构象。
3. 计算过渡态的几何结构:对于每个中间构象,使用过渡态理论计算其几何结构和能量。
常见的过渡态搜索方法有采用内禀反应坐标(IRC)法、能量梯度法等。
4. 多体势能外推:通过已知构象和势能表面计算路径上其他构象的势能。
这需要根据分子力学或量子化学方法计算每个构象的势能。
5. 更新构象:根据计算得到的势能,选择能量最低的构象作为路径上的一个点,并作为下一步计算的初始构象。
然后重复步骤2-5,直到达到收敛条件。
6. 确定最小能量路径:通过计算路径上每个构象的能量,可以确定最小能量路径。
这个路径给出了化学反应的过渡态和构象变化情况。
CNEB方法的优点在于可以通过对构象进行优化和过渡态搜索,找到势能表面上最小能量的化学反应路径。
语音合成集成电路中掩模ROM的解决方案

语音合成集成电路中掩模ROM的解决方案米丹;孟飚;常昌远【摘要】在语音合成集成电路(IC)中,需要存储大量的程序和语音数据,因此内存储器的集成度、读取速度及可靠性成为影响一款芯片生产成本和性能参数的关键指标.存储器有很多分类,掩模只读存储器(ROM)以其较高的集成度和较低的成本在中低档消费类语音合成IC中有着较为广泛的应用.给出一种语音合成IC中掩模ROM 的解决方案,分别介绍3个组成部分:存储单元阵列、地址译码器和读出放大器的设计实现.采用该方案可以有效提高掩模ROM的集成度、读取速度及可靠性,有效降低语音合成IC的生产成本、提高其性能和市场竞争力.【期刊名称】《现代电子技术》【年(卷),期】2007(030)022【总页数】4页(P148-150,153)【关键词】掩模ROM;Flat-cell结构;存储单元阵列;地址译码器;读出放大器【作者】米丹;孟飚;常昌远【作者单位】东南大学,集成电路学院,江苏,南京,210096;无锡日松微电子有限公司,江苏,无锡,214072;无锡日松微电子有限公司,江苏,无锡,214072;东南大学,集成电路学院,江苏,南京,210096【正文语种】中文【中图分类】TN492随着科技发展和社会进步,现代电子产品已经越来越多地走进人们的生活。
而声音作为人类交往的重要手段,也被体现在电子产品设计中。
一块小小的语音芯片就可以使产品具有良好的人机界面、实用性和娱乐性得到增强。
语音IC根据产品性能一般可分为语音合成IC、语音辨识IC和录放音IC。
其中语音辨识IC技术层次较高,虽然已有产品出现,但由于辨识能力低、生产成本高以及应用范围狭窄,严格说还未打开市场;录放音IC主要应用在中高档语音产品中,其语音编解码技术难度较大,成本相对较高,基本为国内外大公司所垄断;而语音合成IC品种丰富、价格便宜,在中低档消费类电子产品中应用较多。
由于语音合成IC需要存储大量的程序和语音数据,因此内存储器的集成度、读取速度及可靠性在很大程度上影响着制造成本和性能指标。
新订单与时间窗口混合驱动的继承性虚拟单元重构
新订单与时间窗口混合驱动的继承性虚拟单元重构韩文民;余义;高龙龙;方锦烽;李正义【期刊名称】《计算机集成制造系统》【年(卷),期】2018(024)005【摘要】为减少虚拟单元重构对原有单元的影响,在新订单到达的情况下,考虑订单与时间窗口相结合的混合驱动方式,研究了继承性的虚拟单元动态重构问题.为保持重构后单元生产的高效性与稳定性,实现虚拟单元的继承性重构,以产品工艺相似性、跨单元次数、设备利用率、物流成本、单元内机器数量和类型变动等为目标,构建了非线性多目标整数规划模型,设计了基于动态层次分析的多目标遗传优化算法求解模型.以船舶生产为例,验证了所提模型的可行性和算法的有效性.实例分析表明,继承性虚拟单元重构在提高设备平均利用率、减少物流成本和完工时间等方面具有明显优势.%To reduce the destructive impacts of Virtual Cellular Manufacturing Systems (VCMS) reconfiguration,the inheritance reconfiguration problem of dynamic VCMS with random arrival orders and time window was studied.With the objectives of production process similarity,inter-cell transfer numbers,equipment utilization,logistics costand inheritance penalty cost,a non-linear multi-objective integer programming model that consideration of efficiency and stability was proposed.Simultaneously,a dynamic Analytic Hierarchy Process (AHP) based adaptive Multi-objective Genetic Algorithm (MOGA) was applied to solve the model.To validate and verify the proposed methods,an illustrative case from a shipbuilding company was presented.The bettercompromise solutions with respect to average utilization rate of equipment,logistics cost and the make-span could be obtained by the proposed methods.【总页数】10页(P1317-1326)【作者】韩文民;余义;高龙龙;方锦烽;李正义【作者单位】江苏科技大学经济管理学院,江苏镇江212003;江苏科技大学经济管理学院,江苏镇江212003;江苏科技大学经济管理学院,江苏镇江212003;江苏科技大学经济管理学院,江苏镇江212003;江苏科技大学经济管理学院,江苏镇江212003【正文语种】中文【中图分类】F273【相关文献】1.基于继承性的圆形窗口多边形裁剪新算法 [J], 邢军伟;陆国栋;谭建荣2.面向订单生产的制造单元动态重构方法研究 [J], 韩文民;曾里义;魏允德;裴春;程龙成3.基于两阶段求解的可重构虚拟制造单元构建方法 [J], 陈亚绒;周余庆;周宏明;李沛4.面向订单制造的可重构制造系统中虚拟制造单元构建技术 [J], 白俊杰;龚毅光;王宁生;唐敦兵5.急件订单干扰下虚拟单元重调度 [J], 韩文民;陈婷;高龙龙;李正义;翁红兵因版权原因,仅展示原文概要,查看原文内容请购买。
集成CAD模型的虚拟微装配系统伺服控制方法
集成CAD模型的虚拟微装配系统伺服控制方法
李春梅;席文明;葛连升;冯虎田
【期刊名称】《山东大学学报:理学版》
【年(卷),期】2006(41)4
【摘要】虚拟技术可克服微装配中显微视觉系统小景深、小视场的问题,但构造虚拟场景时,数据量大、效率低.利用微器件设计时的CAD数据,可减小构造虚拟环境的数据量、提高效率,能够使构造出的场景更精确.利用显微镜聚焦———失焦理论并借助于器件CAD模型构造虚拟环境;将获得的深度信息集成在伺服控制方程中.通过这些方法,可进行复杂路径的规划,完成三维微装配任务,仿真和实验结果均表明上述方法是可行的.
【总页数】5页(P116-120)
【关键词】虚拟微装配;CAD模型;聚焦——失焦;视觉伺服
【作者】李春梅;席文明;葛连升;冯虎田
【作者单位】南京理工大学机械学院;厦门大学机电系;山东大学网络中心
【正文语种】中文
【中图分类】TP24
【相关文献】
1.面向虚拟装配的VR与CAD系统信息集成技术 [J], 王念东;刘毅;李文正
2.CAD系统与虚拟装配系统间的信息集成技术研究 [J], 刘检华;姚珺;宁汝新
3.从CAD系统到集成虚拟装配环境的数据转换研究 [J], 朱文华;范秀敏;马登哲
4.装配CAD/CAPP集成方法与系统实现 [J], 殷晨波;易红
5.基于实体模型的虚拟微装配视觉伺服研究 [J], 席文明;姚斌;王磊;朱剑英
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于xPC实时目标的虚拟合并单元的构建冯善强,梁 军(山东大学电气工程学院,山东 济南 250061)摘要:电子式互感器的应用对提高电力系统尤其是继电保护的可靠性具有重要的意义,其与保护测量装置接口的合并单元具有重要的研究意义。
本文介绍了合并单元及其功能,分析了合并单元利用以太网发送数据帧的格式和内容,基于MATLAB xPC实时目标构建了虚拟合并单元。
该虚拟合并单元可以仿真变电站多种故障,并实时输出采样值报文,经测试具有良好的稳定性和灵活性,为数字化保护测控设备提供了方便、灵活的测试环境。
关键词:数字化变电站;IEC61850;合并单元;xPC目标;数据帧0 引言随着计算机技术、网络通信技术的发展,IEC 61850标准的颁布实施,以及非常规互感器和智能断路器的应用,在变电站自动化领域正发生着常规变电站向数字化变电站的深刻变革[2]。
数字化变电站的结构体系和通信方式较常规变电站均发生了较大变化。
按照IEC61850标准,数字化变电站的一、二次设备分为3层,即站控层、间隔层和过程层,相邻层设备之间采用以太网通信模式。
其中,电气量和开关信号的传输方式均发生了根本性的变化。
在传统变电站中,互感器、断路器与保护、测控设备之间采用二次电缆的连接方式,传输的是模拟量;而在数字化变电站中,非常规互感器通过合并单元向网络发送采样值报文,保护、测控设备通过以太网接收采样值报文,跳闸信号则采用GOOSE报文传输,传输的均是数字量。
合并单元作为联络过程层和间隔层的枢纽,成为数字化变电站的关键设备。
因此,对合并单元的研究具有重要意义。
数字化的保护测控设备均采用了网络接口,因此在研制、调试过程中必需接收合并单元的信号,特别是三绕组变压器保护装置需要接入三路合并单元信号,如果采用物理装置必将增大成本。
为此,基于MATLAB xPC实时目标在普通的PC机上构建了虚拟合并单元,实现了向保护、测控装置实时发送采样值报文,为装置的研发提供了方便、灵活的调试环境。
1 合并单元合并单元首先在IEC 60044-7和IEC 60044-8中提出。
合并单元作为过程层通信装置模块,它是连接高压端数据采集系统与间隔层测量、保护和监控设备的桥梁,主要负责搜集各互感器的数据采集模块传送来的电流、电压采样数据并对其进行加工,经过重新组帧编码后将现场一次设备的采样值信息传送到间隔层二次设备。
IEC 60044-8规定数据集名称(Data-Set Name)只能为01H或FEH。
当DataSet Name = 01H时为通用用途的数据通道布局,如图1所示。
为了满足特定的用途,DataSetName=FEH允许制造厂自由分配各信号源的数据通道。
图1 DataSetName = 01H时的合并单元定义IEC 61850-9-1在很大程度上遵循IEC 60044-7和IEC 60044-8,增加了以太网传输模式以及状态量的数据集:DataSetName=02H,其基本数据集(DataSetName=01H)继承了IEC 60044-7和IEC 60044-8的定义。
但并未规定DataSetName=FEH的特殊用途数据集。
为实现采样值报文的快速传输,避免通信协议栈的延迟,IEC 61850-9-1应用层专门定义了协议数据单元PDU(Protocol Data Unit),经过表示层编码后,不经TCP/IP协议,直接通过特殊通信服务映射(SCSM)将合并单元的信息模型直接映射到以太网的数据链路层,其以太网帧格式固定,如图2所示。
物理信道上的收发操作均使用这个帧格式。
其中,报头、帧起始和帧校验序列由硬件自动添加/删除,与上层软件无关。
其中APDU由若干个ASDU 链接而成,被链接为一个APDU的ASDU的数目可通过配置参数进行定义并目与采样速率有关。
图2 基于IEC 61850-9-1的以太网帧格式2 基于xPC目标的虚拟合并单元的实现本虚拟合并单元的实现主要是是利用了MATLAB/SIMULINK中xPC目标的实时以太网通信功能和相关的数据处理功能。
MATLAB由于具有良好的数据分析、图形处理功能和丰富的PSB模型库,已成为电力系统仿真分析与辅助设计的常用工具。
MATLAB实时仿真和实时网络通信的实现方法已有不少文献予以阐述,但由于合并单元所需采样频率较高(达到10KHZ以上)并且网络延迟有严格要求(0.3-3ms),在非实时的Windows操作系统下的实现难以满足要求,而实时操作系统成本较高,而且网络通信编程实现较为复杂。
MATLAB中xPC Target工具箱为这一问题提供了良好的解决方法。
在MATLAB/xPC Target 环境中,提供了以太网通信I/O模块,基于实时内核能够实现实时仿真和实时I/O,并可由主机实时控制或独立运行。
2.1xPC 目标环境介绍xPC Target是一种高性能的主机-目标机结构原型环境,它能把Simulnk模型和Stateflow模型和物理系统连接起来并且在低成本的PC硬件上实时运行。
xPC Target提供了系统的快速控制原型和硬件在回路仿真完整的解决方案。
利用xPC Target 可以在主机上设计模型,并用Real-Time Workshop和Stateflow Coder自动生成代码,最后下载到运行xPC Target实时内核的PC机上。
用户可以使用32位或64位X86架构的电脑作为实时目标系统。
软件运行在32位模式下。
xPC Target是理想的快速原型和硬件在回路测试工具。
使用另外独立提供的xPC Target Embedded Option,用户可以在独立目标机上开发实时嵌入式系统,用于生产、控制、信号处理、数据获取、标定和测试等场合[7-9]。
xPC具有以下强大功能:1)在任何一台PC机上使用实时内核,运行来自Simulink和 Stateflow的模型,支持任何PC系统,例如TargetBox、PC/104、PC/104+、CompactPCI、嵌入式PC机或其它任何兼容PC机。
2)灵活的启动选项,包括CD,硬盘,网络和软盘。
3)根据处理器的性能水平、模型规模和I/O复杂程度,采样率可达到50KHz。
4)主机和目标机之间采用RS-232或者更快速的TCP/IPT通信,用户可以通过MATLAB命令行或者主机的图形界面(GUI)、标准的网络浏览器或者目标机命令行可以进行实时的目标程序控制、参数调整、信号(数据)采集。
5)xPC提供各种设备驱动,包括ISA、PC/104、PCI、CompactPCI总线的各种IO板卡,4.0版增加了对实时 RAW Ethernet 通信的支持,支持通过intel网卡的实时以太网通信。
6) C和COM API让用户可以编程开发用户图形界面来获取或控制实时应用程序。
2.2 虚拟合并单元的搭建本虚拟合并单元的搭建主要使用了SIMULINK模块库中xPC子库的Ethernet子库中的模块,其主要构造如图3所示,其中:图3 基于xPC的合并单元模型1-12路输入:合并单元可以接入的最多12路电压、电流信号。
9-1 Frame模块:为自定义的子系统,用于组建9-1数据帧,内部结构如图4所示。
由于ASDU状态量数据集在实际中应用较少,本模块仅考虑了基本数据集的组帧。
其中:图4 9-1 Frame模块内部结构1)除12路输入外的各数据项均由一个Constant 模块实现,并输入相应内容,例如TCI的内容为“hex2dec('8000')”,即将16进制的8000转化为十进制输入。
2)12路输入信号通过增益模块基于IEC 60044-8规定的数字量输出额定值进行了变换,将double类型的输入转换为int16类型的输出。
例如,测量用ECT输出额定值为2D41H,则模型中测量用电流的增益为hex2dec('2D41')/Ir,其中Ir为额定相电流,是合并单元封装后的一个参数。
3)由于ASN.1为大端编码,故将两字节的数据项均通过Byte reversal模块进行了变换,然后通过Pack模块将同类型的uint16或int16数据项打包为单字节的uint8数据流。
单字节的数据项未作处理。
各数据项最终通过Mux模块后汇总输出。
EthernetInit模块:初始化以太网通信通道,每个以太网卡对应一个EthernetInit模块。
需要选择DeviceID,需要输入的参数有:PCI总线号、槽号和网卡MAC地址。
PCI总线号、槽号可以在主从机建立连接后在MATLAB命令窗口输入getxpcpci('all')获得;MAC地址在IEC61850规定的范围内设定。
BufferMngmt模块:初始化网络缓冲区,可以设置缓冲区的大小,一般使用默认设置即可。
CreateEthernetPacket模块:构造以太网数据包,需要输入的参数:目的MAC设为FFFFFFH广播地址,也可以设为组播地址;以太网类型设为hex2dec('8100')。
要发送的数据和对应的数据字节数作为输入,输出的数据包交由EthernetTx模块发送。
EthernetTx模块:用来发送数据包,DeviceID 与Ethernet Init模块保持一致,采样速率设为-1(继承)。
各模块参数设置完毕后封装为MergingUnit子系统,设定外形如图5中MergingUnit模块所示,可配置参数包括:SV组播MAC地址、每帧包含ASDU个数、额定相电流、额定中线电流、额定相电压、额定延时、状态字1,状态字2、采样速率。
注意:如果要在一个模型文件中包含多个虚拟合并单元模块,必须将BufferMngmt模块移到合并单元模型外面,因为在一个模型文件中xPC只允许包含一个BufferMngmt模块。
3 性能测试为了测试本虚拟合并单元的性能,搭建了一个有两条出线的110kV变电站一次系统模型,接入合并单元模型,如图5所示。
Powergui模块配置为离散状态,采样步长为100us。
仿真环境配置为定步长仿真,步长设为100us,采用离散求解器。
主机与目标机连接成功后,将模型编译并下载到目标机上。
目标机CPU为Intel Pentium4处理器,主频为2.4GHz。
网络传输设备:Intel以太网网卡、普通五类双绞线和普通交换机(不支持以太网优先级)。
搭建一个小型局域网,目标机和另一台PC机通过交换机相连。
主机控制目标机实时运行目标程序。
第三台PC机通过局域网接受合并单元发出的数据包,用Ethereal软件抓取报文。
分析结果表明,在多种短路故障情况下(只有一个故障点),虚拟合并单元均能较为理想的发送采样值报文,最大延时不超过+-50us,多次试验情况下未发现丢包现象;同时接入三路合并单元,数据延迟抖动较为明显,平均延时不超过+-200us,仍能满足IEC 61850-9-1中采样值数据传输3ms的最大延迟时间要求。