针对锅炉大时滞非线性的系统初步方案拟定
锅炉系统工程设计方案

锅炉系统工程设计方案一、项目背景随着工业生产的不断发展,锅炉系统在工业生产中起着非常重要的作用。
而随着能源环保意识的不断提高,锅炉系统的设计也面临着新的挑战。
因此,为了满足工业生产对热能的需求,同时也要兼顾环境保护和节能减排的要求,对于锅炉系统工程设计方案需要进行全面的考虑和规划。
二、项目概述本项目旨在设计一套高效、环保、节能的锅炉系统,以满足工业生产对热能的需求。
根据工程设计范围和要求,将涵盖锅炉系统的整体设计、燃料选择、烟气处理等多个方面,并注重系统的可靠性和安全性。
三、系统整体设计1. 热负荷测算:根据生产线和设备的热负荷需求,结合生产计划和预测,计算出整个锅炉系统的热负荷。
2. 锅炉选型:根据热负荷需求和燃料特性,选用适当的锅炉类型和规格。
考虑到系统的运行安全性和节能性,结合设计方案和项目要求,选定合适的锅炉。
四、燃料选择1. 燃料种类:根据工程项目的实际情况和特点,煤、油、天然气等多种燃料可供选择。
2. 燃料性能:对选用的燃料进行详细的性能测试和分析,确保燃料的稳定性和燃烧效率。
五、烟气处理1. 烟气净化:对锅炉排放的烟气进行有效的净化处理,减少有害物质的排放,并达到环保要求。
2. 烟气废热回收:通过对烟气的余热回收,提高系统的热能利用率,并减少能源消耗。
六、安全性设计1. 锅炉运行安全:通过对系统进行全面的设计和排查,确保系统在正常运行过程中能够保持安全、稳定的状态。
2. 应急救援:为系统设计应急救援方案,确保在可能发生的突发情况下能够及时采取应对措施,保障人员和设备的安全。
七、节能减排1. 蓄热系统:设计蓄热系统来存储过剩热能,并在需要时释放,以减少系统在低负荷运行时的能源浪费。
2. 高效燃烧:通过优化锅炉燃烧系统、提高燃烧效率,减少燃料的消耗,降低系统的能源消耗和排放量。
八、系统集成1. 锅炉系统与生产线的集成设计:将锅炉系统与生产线进行有效的结合,确保系统能够灵活、高效地为生产物料提供热能。
锅炉运行方案

锅炉运行方案引言:锅炉是一种用于产生蒸汽或加热水的设备,被广泛应用于工业和家庭环境。
为了确保锅炉的安全和高效运行,制定一套科学合理的锅炉运行方案至关重要。
本文将从锅炉的日常维护、操作规程和安全措施等方面,提出一份全面的锅炉运行方案。
一、日常维护日常维护是保持锅炉正常运行的基础,以下是一些常见的日常维护工作:1. 清洁锅炉和烟道:定期清理锅炉内部的沉积物和烟道中的积灰,以确保热交换效率,并减少污染物的排放。
2. 检查水位:每班交班时应检查炉水水位,确保水位在正常范围内,避免出现低水位或高水位的情况。
3. 校准仪表:定期校准锅炉的仪表,如压力表、温度计和液位计,确保其准确可靠。
4. 检查阀门和管道:定期检查各种阀门和管道的密封性能,如安全阀、排放阀和进出水管道,确保其工作正常。
5. 润滑设备:根据锅炉制造商的要求,定期给锅炉的润滑部件加油或更换润滑剂,以确保设备的正常运转。
二、操作规程正确的操作规程是保证锅炉安全运行的关键,以下是一些常见的操作规程:1. 启动和停止:锅炉启动前应先检查各种阀门和管道的开启情况,并确保炉水达到正常水位后才能启动。
停止时应逐步降低燃料供应,待锅炉冷却后再关闭所有阀门。
2. 燃烧调节:根据锅炉负荷的变化,调整燃烧器的工作状态,保持燃烧器的高效工作。
同时,还需定期清理燃烧器内部的沉积物,以确保燃烧效果。
3. 炉水控制:保持锅炉内炉水的正常水位,定期检查炉水质量,并根据需要进行补充或排放,避免水位过高或过低产生的安全隐患。
4. 压力控制:定期检查锅炉内的压力表,确保锅炉的运行压力在安全范围内。
同时,需要注意压力上升或下降过快的情况,并及时采取措施解决问题。
5. 排放废气和废水:锅炉在运行过程中会产生废气和废水,需要以环保的方式进行排放,确保不对环境造成污染。
三、安全措施锅炉是一个高温高压设备,为了确保操作人员和设备的安全,以下是一些常见的安全措施:1. 人员培训:对操作人员进行必要的培训和考核,确保他们具备正确的操作技能和安全意识。
大时滞过程控制方法及应用分析
大时滞过程控制方法及应用分析诸葛晓春南宁化工股份有限公司,广西南宁530001摘要:本文对常用控制方法中的PID控制、Smith预估控制、Dahlin控制以及现代控制方法中的内膜控制、预测控制等各种控制方法及特点进行介绍,并对大时滞过程控制方法的应用进行分析。
关键词:大时滞;控制方法;应用分析时滞是工业生产中常见的现象。
存在时滞,意味着系统的扰动不能及时地在控制作用上得到反映,而是延迟一段时间后才在对象输出上反映出来。
因此,选择适当的控制方法,能有效控制时滞系统,保证工业生产的安全可靠性。
1.经典控制方法1.1Smith预估控制Smith预估控制方法是由瑞典科学家Smith提出的,它的基本控制思路是预估出系统在扰动状态下的特征,再通过构建函数,以向内反馈的形式,使常规控制器的时滞得到补偿,达到控制作用超前反映在对象输出上的目的。
从理论上讲,Smith预估控制法可以避免时滞现象带来的影响,然而在实际的实践中却大相径庭。
被控制对象的精确的数学模型是Smith预估控制器得以实现的基础,因此,当数学模型与控制对象存在偏差时,控制器便达不到预期的控制效果,甚至还有恶化的可能。
1.2Dahlin控制Dahlin控制是由Dahlin在1968年提出的一种数字控制方法,它主要是针对大纯滞后系统,即对当纯滞后时间τ与对象时间常数T之比(τ/T),大于0.5甚或超过1.0时的对象进行控制。
它的基本思路是使得闭环系统等效为一个一阶惯性环节加纯滞后环节,并期望整个闭环系统的纯滞后时间和被控对象的纯滞后时间相同。
Dahlin算法方法比较简单,只要根据传递函数设计出合适的且可以实现的数字调节器,就能够有效地克服纯滞后的不利影响。
但采用Dahlin控制会出现振铃现象,即闭环系统的输出以指数形式较快地趋向稳态值,而数字控制器的输出则以二分之一的采样频率大幅度的衰减震荡。
这样一来,会造成执行机构大幅度的摆动,加剧磨损,甚至引起系统的稳定性下降。
锅炉主汽压力控制系统的非线性控制研究
1 锅 炉 主汽 压 力控 制 系统
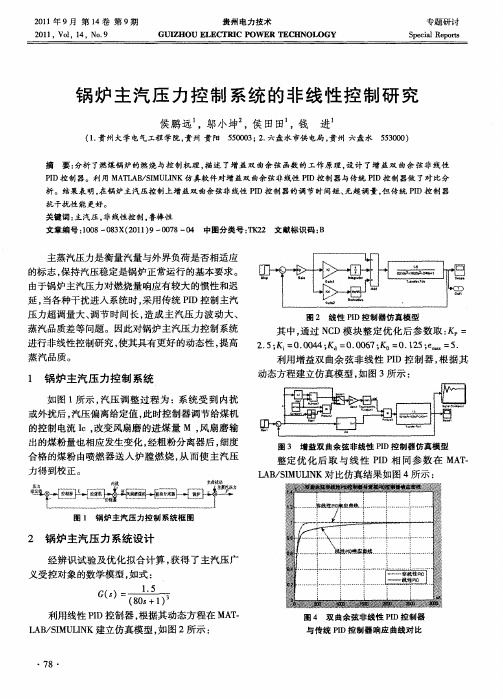
如 图 l所示 , 压 调 整 过 程 为 :系统 受 到 内扰 汽 或外 扰后 , 汽压 偏离 给定值 , 时控制 器调 节给 煤机 此 的控 制 电流 I 改 变风 扇磨 的进 煤 量 M , c, 风扇 磨 输
出 的煤粉量 也相 应发 生变化 , 经粗 粉分 离器 后 , 细度
L B SM LN A / I U IK建立仿真模型, 如图 2所示 :
图 4 双 曲余 弦 非 线 性 P D控 制 器 I
与传统 PD控 制器 响应 曲线对比 I
・
78 ・
第 9期
侯鹏远 , : 等 锅炉 主汽压力控 制系统 的非线 性控制研究
结果 分 析 : 由图可 以看 出非 线性 PD控制 器 的 阶跃 响应 速 I 度要 优 于传 统 PD控 制器 , I 虽然 非 线 性 PD控 制 具 I
侯鹏远 ,邬小坤 侯 田田 钱 进 , ,
( . 州大学 电气工程 学院 , 州 贵 阳 1贵 贵 摘 50 0 ; . 50 3 2 六盘 水市供 电局 , 州 六盘水 贵 5 30 ) 5 0 0
要: 分析 了燃煤锅 炉的燃烧 与控 制机理 , 述 了增益双 曲余 弦函数 的工作原 理 , 描 设计 了增益 双 曲余 弦非线性
e 虹 =5; m
=3 6 9 8 Ko= 一 1 8 8 1 . 6 1, . 9 7,
8; 0 参数 的 整定优 化后 得 :
传统 PD控制器取最优参数 :p 043 ,i I K = .97 K =
0. 0 75 98, 00 6 =5 28 3; 2. 5
有一定的超调量 , 而传统 PD控制没有超调量 , I 在整 个调节过程 中, 非线性增益 函数』 从 1 () 急剧变化 为 10 , .2 虽然 变化幅度不是很大 , 但对控制 系统的 性能却是很大提高 。并且从 图中可 以看 出: 与传统 PD控制器相 比, 曲余 弦非线性 PD控制器提前 I 双 I 5 0 趋于稳定 , 0s 因此其具有 比传统 PD调节器更好 I
锅炉改进实施方案

锅炉改进实施方案随着工业化进程的不断推进,锅炉作为工业生产中不可或缺的设备,其性能和效率对生产线的稳定运行起着至关重要的作用。
然而,在长期使用过程中,锅炉可能会出现一些问题,如能源消耗过大、排放污染物过多、运行效率低下等,这些问题直接影响到企业的生产成本和环境保护。
因此,对锅炉进行改进,提高其性能和效率,已成为许多企业亟需解决的问题。
一、锅炉性能分析首先,我们需要对现有锅炉的性能进行全面分析。
从能源消耗、排放情况、运行效率等方面进行评估,找出问题所在,为后续的改进工作提供依据。
二、技术改进方案1. 燃烧系统优化通过对锅炉燃烧系统的优化,可以提高燃烧效率,减少燃料消耗,降低能源成本。
采用先进的燃烧控制技术,保证燃烧过程的稳定性和高效性,同时减少对环境的污染。
2. 热能利用改进在锅炉烟气余热利用方面进行改进,可以有效提高锅炉的热能利用率。
通过安装余热回收装置,将烟气中的余热回收利用,用于加热水或发电,从而减少能源消耗,降低生产成本。
3. 污染物排放控制加强对锅炉污染物排放的控制,采用先进的污染物治理技术,减少对大气环境的影响。
安装烟气脱硫、脱硝设备,降低二氧化硫、氮氧化物等有害气体的排放,达到环保要求。
三、实施方案1. 制定改进计划根据对现有锅炉性能的分析和技术改进方案,制定具体的改进计划。
明确改进的目标和时间节点,确定改进所需的投资和资源,确保改进工作的顺利实施。
2. 技术改进实施按照制定的改进计划,进行技术改进的实施工作。
包括燃烧系统优化、热能利用改进、污染物排放控制等方面的具体工程项目,确保改进工作的质量和进度。
3. 运行监测和调整改进工作完成后,需要对锅炉的运行情况进行监测和调整。
通过实时监测锅炉的运行参数,及时发现问题并进行调整,保证改进效果的持续稳定。
四、效果评估改进工作完成后,需要对改进效果进行全面评估。
从能源消耗、排放情况、运行效率等方面进行对比分析,验证改进工作的效果,为后续工作提供经验和借鉴。
基于PLC和组态技术的锅炉水温串级控制系统设计
2011 届毕业设计说明书基于PLC和组态技术的锅炉水温串级控制系统设计摘要本设计论述了基于PLC和组态技术的锅炉内胆水温和夹套水温构成的串级控制系统的设计过程。
下位机编程软件采用SIEMENS公司的STEP 7软件,选用西门子S7-400PLC控制锅炉温度的控制系统,介绍了西门子S7-400PLC和系统硬件及软件的具体设计过程。
上位机组态画面软件采用SIMATIC WINCC,对其进行了简单介绍,并详细介绍了项目的创建、变量的新建、画面的组态。
上位机进行程序编写实现控制,下位机组态画面,建立人机界面,进行远程控制。
锅炉水温具有非线性、时变性、大滞后和不对称性等特点,采用传统的控制方法所得到的控制量的控制品质不高。
锅炉内胆与夹套构成串级控制。
由于串级控制具有有效改善过程的动态特性、提高工作频率、减小等效过程时间常数和加快响应速度等特点,所以在克服被控系统的时滞方面能够取得较好的效果。
串级控制中的主副回路是控制夹套和内胆的温度,温度是一个多变且不易控制的量,而PID控制在这方面具有突出的优点,很适合采用PID控制技术。
综合以上得到一个品质比较高的控制系统。
关键词PLC;组态技术;串级控制;锅炉水温;PID控制ABSTRACTThis design is discussed based on PLC and configuration technology of water temperature and clip boiler water tank consists of cascade control system design process. Lower level computer programming software using the SIEMENS company's STEP 7 software, choose SIEMENS s7-400plc control boiler temperature control system, introduces SIEMENS s7-400plc and system hardware and software, and the specific design process. Upper unit used in the software configuration screen WINCC, the SIMATIC simply introduced, and introduces the creation, variable of project construction, picture configuration. PC for programming realize control, lower frame) unit, establish normal screen man-machine interface, carries on the remote control.Boiler water temperature with nonlinearness, time delay and asymmetry wait for a characteristic, USES the traditional control method can get control portion control quality is not high. Boiler of the bladder and clip constitutes a cascade control. Due to the cascade control has effectively improve the dynamic characteristics, improve process working frequency, reducing the time constant and accelerate equivalent process characteristic, the response speed of the controlled system in overcome delay to the good result is achieved. Cascade control the principal deputy loop is control of the temperature of the clamping and bladder, temperature is a variable and not easy to control, and the amount of PID control in this respect has outstanding advantages, very suitable PID control technology. Comprehensive above gets a quality higher control system.Key words plc;configuration technology;cascade control;boiler water temperature;pid control目录1 引言 (4)1.1 系统的设计背景 (4)1.2 系统设计内容及技术要求 (5)1.3 系统的设计原理 (5)1.4 系统的整体设计方案 (6)2 串级控制系统设计 (7)2.1 串级控制系统的概述 (7)2.2 PID控制系统的简介 (8)2.3 PID控制器的参数整定 (10)3 硬件系统设计 (13)3.1 PLC的基本介绍 (13)3.2 S7-400简介 (14)3.3 其它器件介绍 (16)4 STEP 7简介及组态硬件、程序编写 (18)4.1 STEP 7简介 (18)4.2 STEP 7项目的创建 (20)4.3 组态硬件 (22)4.4 SETP 7编程介绍 (25)4.5 变量及系统程序 (26)5 WINCC简介及人机界面组态 (33)5.1 WinCC简介 (33)5.2 WinCC系统功能 (34)5.3 WinCC的项目创建及组态方法 (35)6 控制系统整体调试 (46)6.1 系统整体测试 (46)6.2 系统测试的结果 (47)结束语 (48)参考文献 (49)致谢 (51)1 引言1.1 系统的设计背景自70年代以来,由于工业过程控制的需要,特别是在电子技术的迅猛发展,以及自动控制理论和设计方法发展的推动下,国外温度控制系统发展迅速,并在智能化自适应参数自整定等方面取得成果。
锅炉整改方案

(2)设备更换:根据检查结果,及时更换老化、磨损严重的部件,确保锅炉设备安全运行。
(3)定期检测:加强锅炉运行过程中的安全检测,确保设备在安全范围内运行。
3.提高锅炉自动化程度
(1)自动化系统升级:对锅炉控制系统进行升级,实现自动调节、远程监控等功能。
2.设计与施工:委托具有资质的设计单位进行整改方案设计,组织专业施工队伍进行施工。
3.设备安装与调试:按照设计方案,进行设备安装、调试,确保锅炉设备正常运行。
4.验收与投运:完成整改工程验收,确保整改效果,并投入使用。
5.运行监测与维护:加强锅炉运行监测,定期进行维护保养,确保锅炉长期稳定运行。
四、预期效果
3.提高锅炉自动化程度
(1)配置先进的自动化控制系统,实现锅炉的自动启动、停止、调节负荷等功能;
(2)对锅炉运行数据进行实时监测,实现远程监控及故障诊断;
(3)减轻操作整改方案,向上级部门申请立项;
2.设备选型:根据整改目标,选型高效、低排放的锅炉设备;
3.设计与施工:委托具有资质的设计单位进行整改方案设计,并组织施工;
4.设备安装与调试:按照设计方案,进行设备安装、调试,确保锅炉正常运行;
5.验收与投运:完成整改工程验收,确保整改效果,并投入使用;
6.运行监测与维护:加强锅炉运行监测,定期进行维护保养,确保锅炉长期稳定运行。
六、预期效果
1.锅炉热效率提高,能源消耗降低;
4.提高锅炉自动化程度,减轻操作人员负担。
二、整改措施及实施步骤
1.更新锅炉设备
(1)选型与采购:根据实际需求,选择高效、低排放、节能的锅炉设备。在设备采购过程中,严格遵循公开、公平、公正的原则,确保设备质量。
科技成果——基于一体化冷凝燃气锅炉的非线性闭环智能供热技术

科技成果——基于一体化冷凝燃气锅炉的非线性闭环智能供热技术技术类别减碳技术适用范围建筑行业,民用建筑采暖、工业供热。
行业现状目前该技术在北京、山西、山东等20余个供热项目中应用,累计供热面积约800万m2。
成果简介(1)技术原理新型燃气锅炉将锅炉与冷凝回收装置集于一体,减少了冷凝回收装置二次换热造成的能量损失。
同时,采用智能化供热控制技术,使供热系统热量得到精准投放,实现了高效高质供热。
(2)关键技术1、一体式燃烧冷凝设计技术新型燃气锅炉将锅炉与冷凝回收装置集于一体,减少了冷凝回收装置二次换热造成的能量损失,烟气换热面采用特殊波纹结构设计,提升了换热效率;同时烟气在两组波纹结构中高速流动时形成冲刷作用,使换热面持久清洁。
2、低氮炉体结构设计技术采用单回程炉体结构设计,同样炉筒内,比传统三回程炉体可安装更大尺寸炉膛,减少了热力型氮氧化物生成。
3、智能供热控制技术采用大数据方法,对供热系统负荷、三级管网供热平衡、实时室温、历史气象及实时用热需求进行分析,提出合理供热策略。
同时,采用智能化云控能量阀技术,集成流量、温度、压力测量及无线通信远传功能,通过对换热站、管网、楼宇热负荷的自动调节,实现供热系统热量的精准投放。
(3)工艺流程一体式冷凝燃气热水锅炉换热流程图主要技术指标30℃回水时,锅炉满负荷热效率106.7%,最小负荷热效率109.5%;40℃回水时,锅炉满负荷热效率102.2%,最小负荷热效率105.1%;50℃回水时,锅炉满负荷热效率98.5%,最小负荷热效率100.5%;系统综合节能率约32.7%;供暖室温波动范围:±0.5℃;住宅供暖单季耗气量:5-7Nm3/m2。
技术水平该技术获得国家发明专利8项,实用新型专利15项,计算机软件著作权3项。
智能供热控制系统示意图典型案例典型案例:北京于辛庄“煤改气”工程建设规模:供暖面积80万平米。
主要建设内容:管网敷设、锅炉安装、800kW变压器安装、连续出水量每小时70立方米用水井建设、DN500中压天然气管道铺设以及燃气调压箱安装及智能控制系统一套。
清华同方城市集中供热优化控制服务系统

城市集中供热优化控制服务系统(xìtǒng)-同方股份有限公司技术(jìshù)产品名称:城市(chéngshì)集中供热优化控制服务系统技术产品(chǎnpǐn)所属类别:控制系统(kònɡ zhì xì tǒnɡ)、服务系统技术产品应用领域:城市集中供热技术产品原理:自1989年成功实施首个集中供热控制工程以来,清华同方在城市集中供热行业实施的项目覆盖了4000多个热力站,超过了4亿平方米供热面积,数十座热源厂控制工程建设。
经过近21年的工程经验积累,并根据国内城市集中供热系统的特点,总结出了一套适合国内城市集中供热行业的优化控制服务一体化解决方案。
优化控制解决方案涵盖多热源并网运行、网源协调运行、全网优化控制、分布式变频控制、二次网循环变频泵控制等。
服务方面,在提供现场服务的同时,我们还提供远程的专家服务。
在北京,我们建立了城市集中供热信息服务平台,该平台实时从各热网监控中心得到相关数据,并将专家的经验形成专家知识库,信息服务平台通过相关的实时数据和专家知识库为热网及热源提供安全运行、合理运行及经济运行等方面的指导服务。
城市集中供热优化控制服务一体化解决方案的系统网络和软件架构请参见下图。
控制服务(fúwù)系统网络图控制服务(fúwù)系统软件架构图技术(jìshù)产品优势:1、以全网供热效果趋于一致为目标(mùbiāo),同时兼顾个别换热站的特殊要求。
2、避免一次网电动调节阀开度或一次网分布式变频(biàn pín)泵频率的大幅波动,减少一次管网的运行振荡。
3、缩短一次管网的水力平衡时间(shíjiān),减少劳动强度。
4、提供多种采暖方式的协调供热(工业用户、暖气片采暖用户、地盘管采暖用户等)5、可以满足间歇采暖用户的需求。
锅炉系统调整方案

锅炉系统调整方案介绍在工业企业生产过程中,锅炉系统是至关重要的组成部分,因为它是工业的重要能源供应来源。
如果锅炉系统不得当,将导致能源的大量浪费、环境污染和安全隐患。
为此,我们需要采取一定的措施来进行锅炉系统的调整,以提高其效率和安全性。
方案在本文中,我们提供一些锅炉系统调整方案,以减少能源的浪费,降低环境污染,并提高系统的安全性。
1. 定期维护为了保证锅炉系统的正常运行,我们需要定期进行维护和保养。
在维护期间,操作人员应对锅炉系统进行全面检查,包括清理内部积尘和沉淀物,更换损坏的零件和设备等等。
同时,还应检查和替换附属设施,如给水泵、流量计和控制器等设备。
2. 优化燃烧过程燃烧是锅炉系统中最主要的过程,其效率直接关系到系统的整体性能。
因此,在燃烧过程中,我们需要采取一些措施来优化其效率。
一方面,我们需要调整燃烧空气和燃料的混合比例,以确保充分燃烧,降低能源浪费;另一方面,我们可以采用高效的燃烧设备和系统,如设备自动调节、燃烧控制器和变频器等。
3.采用余热回收技术锅炉系统在发供热时会产生大量的废气和废热,这些能量可以通过余热回收技术加以利用。
余热回收技术的原理是通过在废气排出口设备换热器来回收热量,将其用于生产过程中的热水供应、恒温空调、蒸汽再生、提高回收率等方面,最大程度地减少系统的能源浪费。
4.加强安全管理安全管理对于锅炉系统来说尤为重要。
在操作过程中,操作人员需要严格遵守操作规程,必须保持设备的正常工作状态。
如果发现问题应及时报告,并采取措施予以解决。
此外,还需要每天确定和记录锅炉运行数据,对于出现的任何异常情况都应及时报告和解决。
总结通过对锅炉系统调整方案的介绍,我们可以看到,优化锅炉系统的性能不仅能够降低环境污染,节约能源,改善企业生产环境,更能保证企业的生产质量和安全。
因此,我们应充分重视锅炉系统调整工作,并及时采取措施,为企业创造更好的发展环境。
炉锅集中供热工程dcs技术方案--大学毕设论文

xx县锅炉集中供热工程项目分散控制系统DCS技术方案xx有限公司20xx年x月目录第一部分概述 (5)1项目概述 (5)2循环流化床锅炉业绩 (5)第二部分DCS技术方案 (6)1控制范围和目标 (6)2NT6000简介 (6)2.1 系统结构图 (7)2.2 系统主要性能和指标 (7)2.2.1 运行环境 (8)2.2.2 抗干扰性能 (8)2.3 控制网络(eNET) (8)2.4 分散处理单元 (9)2.4.1 控制器硬件规格 (10)2.4.2 控制器I/O能力 (10)2.5 输入、输出模件 (10)2.6 人机接口 (11)2.7 GhaphX人机接口软件 (12)2.8 ControlX组态软件 (13)2.9 NT6000系统现场总线解决方案 (13)2.10 控制机柜 (14)2.11 管控一体化解决方案 (15)3DCS技术方案 (16)3.1 控制室布置 (16)3.2 DCS系统的配置 (16)3.2.1 DPU的配置 (16)3.2.2 I/O测点的配置 (17)3.2.3 人机界面的配置 (17)3.2.4 后备硬手操的配置 (17)3.2.5 控制机柜和操作台的配置 (17)3.2.7 网络的配置 (18)3.2.8 与外系统的接口 (18)3.2.9 电源和接地的配置 (18)4网络系统图 (19)5DCS供货设备清单 (20)第三部分循环流化床锅炉的控制 (22)1前言 (22)2工艺系统说明 (23)3锅炉炉膛安全监控系统(FSSS)的控制方案 (24)3.1 锅炉点火系统 (24)3.1.1 概述 (24)3.1.2 点火燃烧器 (24)3.1.3 燃烧器的油系统 (24)3.2 锅炉启动和自动点火系统(BCS) (24)3.2.1 炉膛吹扫 (24)3.2.2 锅炉冷态启动 (24)3.2.3 锅炉热态启动 (26)4调节控制系统的策略和要求 (27)4.1 基于残炭控制的循环流化床锅炉协调控制系统 (27)4.1.1成果的技术背景和技术原理 (27)4.1.2 CFB锅炉的机理和残炭的概念 (27)4.1.3 残炭控制在CFB锅炉协调控制上应用 (29)4.1.4 基于残炭控制的CFB锅炉协调控制的应用效果 (29)4.2 控制回路设计 (29)4.2.1 锅炉负荷控制回路 (29)4.2.2 床温控制回路 (30)4.2.3 一次风流量(压力)控制回路 (30)4.2.4 二次风流量控制回路 (30)4.2.5 风门挡板的控制方式及要求 (31)4.2.6 石灰石给料控制回路 (31)4.2.7 床压控制回路 (31)第四部分工程实施及管理 (32)1概述 (32)2项目管理 (32)3工程设计 (33)4软件组态 (33)5静态调试 (34)6内部出厂验收 (34)7外部出厂验收 (34)8现场调试 (34)10.1快速应急服务: (35)10.2 预防服务 (36)10.3 增值服务 (36)第一部分概述1 项目概述本技术方案是针对xx县锅炉集中供热工程项目全厂自动控制一体化的设计思路提出的,采用可靠、先进、易用的NT6000分散控制系统(DCS),提供设计、制造、调试、投运等一体化服务。
锅炉自动控制系统的设计与调试

锅炉自动控制系统的设计与调试锅炉自动控制系统是现代工业中常见的关键设备之一,它能够确保锅炉能够高效、安全地运行。
设计和调试这样一个复杂的系统需要综合考虑多个因素,包括控制策略、传感器选择、控制器配置等等。
本文将深入探讨锅炉自动控制系统的设计与调试过程。
首先,设计一个合理的控制策略是锅炉自动控制系统的关键。
常见的控制策略包括比例控制、比例积分控制、模糊控制和模型预测控制等。
在选择控制策略时,需要考虑锅炉的特性、工艺要求以及可用的控制器等因素。
比例控制是最简单的控制策略,它根据当前错误信号的大小来控制执行机构输出。
比例积分控制在比例控制的基础上增加了积分部分,用于消除静态偏差。
模糊控制则通过模糊规则和模糊集合来实现控制,它能够应对非线性系统。
模型预测控制基于数学模型预测未来的系统行为,并制定最优的控制策略。
根据具体的需求和实际情况选择合适的控制策略非常重要。
其次,选择合适的传感器对于控制系统的稳定性和精确度来说也至关重要。
常用的锅炉传感器包括压力传感器、温度传感器、流量传感器等。
压力传感器用于监测锅炉内部压力的变化,温度传感器则用于测量锅炉内部温度的变化。
流量传感器可用于测量锅炉进出口的流量,以便精确控制水的供给。
传感器的选择需要考虑其精确度、响应速度和适应环境等因素。
同时,还需要考虑传感器与控制器之间的数据传输方式,如4-20mA信号或数字信号等,以确保数据准确传递。
控制器的配置也是锅炉自动控制系统设计中不可忽视的一环。
现代控制器提供了更多的功能和选项,如PID参数调整、通信接口、报警功能等。
PID控制器是最常见的控制器类型,通过调整比例、积分和微分参数来实现控制。
在配置PID控制器时,需要首先根据实际情况调整比例、积分和微分参数,以达到理想的控制效果。
另外,现代控制器通常具有通信接口,可以与上位机或网络连接,以实现远程监控和数据采集。
此外,控制器还应具备相应的报警功能,在发生异常情况时及时报警,保障安全运行。
关联时滞大系统的时滞相关镇定的开题报告

关联时滞大系统的时滞相关镇定的开题报告一、研究背景时滞系统在许多领域中广泛应用,例如控制理论、信号处理、通信系统、生物医学工程等。
然而,由于其非线性和时变性质,时滞系统的分析和控制一直是一个重要的研究领域。
当时滞量较小时,可以采用线性控制方法解决,但时滞量较大时,则需要更高级的控制方法。
因此,研究时滞相关的控制问题,尤其是关联时滞大系统的控制问题,具有重要的实用价值和理论意义。
二、研究内容本次研究主要是针对关联时滞大系统的时滞相关镇定问题展开研究。
所谓关联时滞大系统,指的是由多个互相影响和耦合的子系统组成的时滞系统,每个子系统具有不同的时滞,而不同子系统之间又存在一定的时滞关联。
具体来说,主要研究内容包括以下几个方面:1.建立关联时滞大系统的数学模型,并采用非线性控制方法对其进行描述。
2.分析关联时滞大系统的时滞相关镇定问题,并研究镇定性能的量化指标和稳定性条件。
3.针对不同时滞关联情况,设计相应的控制方法,包括反馈控制、前馈控制和鲁棒控制等。
4.对所设计的控制方法进行仿真和实验验证,评估其镇定性能和适用性。
三、研究意义本次研究的主要意义在于解决关联时滞大系统的时滞相关镇定问题,针对实际控制工程问题提供可行的解决方案,并促进时滞系统的理论研究和工程应用。
具体来说,可得到以下几方面的意义:1.提高时滞系统的控制精度和鲁棒性,促进工业控制的发展。
2.拓展非线性控制理论应用范围,推进科学发展。
3.为相关领域的研究提供可行的参考和理论支撑。
四、研究方法和技术路线本次研究的方法主要采用理论分析和数值仿真相结合的方法,具体技术路线如下:1.建立关联时滞大系统的数学模型,采用随机微分方程和稳定性理论分析系统的性质。
2.通过理论分析,得到关联时滞大系统的时滞相关镇定性能的量化指标和稳定性条件。
3.针对不同的时滞关联情况,设计相应的控制方法,并进行仿真和实验验证。
4.根据实验结果,调整控制参数,优化控制效果。
五、预期成果本次研究的预期成果包括以下几个方面:1.系统分析关联时滞大系统的时滞相关镇定问题,得到关键的量化指标和判定条件。
大时滞过程控制系统及simulink仿真

大时滞过程控制系统及simulink 仿真课题背景:在化工、冶金、石油等工业生产过程中,广泛存在较大的纯时间滞后(时延)。
纯滞后往往是由于物料或能量需要经过一个传输过程而形成的,例如从阀门动作到压力传感器的变化。
反馈控制系统是以当前观测到的被控对象的输出为依据的,与给定值比较产生偏差,控制器根据偏差提供一个合适的控制信号给执行机构,因此测量对象实际输出就可以使控制作用及时、大小适度。
然而,过程控制通道或测量变送元件上的纯滞后将影响系统动态性能,使得系统在输人作用下被控对象不能立即产生效果,从而使控制调节不及时,过渡过程时间加长,系统的超调量增大,导致过渡过程的剧烈振荡,严重地破坏了系统的稳定性。
过程扰动通道中的纯滞后对闭环系统的动态性能没有影响,仅使系统的输出对扰动的反应延迟一个纯滞后时间。
从广义角度来说,所有的工业过程控制对象都具有纯滞后性,目前克服大滞后的常用控制方有:改进的常规控制方案、预估补偿方案、采样控制方案。
方案采用原理:一、 pid 控制原理:(1) 比例单位:成比例地放大或缩小控制系统的偏差信号e (t ),只要被控制量偏离其给定的目标值,控制其便会产生与偏差信号成正比的输出信号,通过执行器使偏差减小。
(2) 积分单位:主要用来消除静差,提高系统的无差度。
只要被控制量存在偏差,其输出的调节作用便随时间不断加强,直至偏差为零。
积分作用的强弱取决于积分时间常数TI ,TI 越小,积分作用越强,反之则越弱。
(3) 微分单位:反映偏差信号的变化趋势(即变化速率),并能在偏差信号出现或变化的瞬间,立即根据变化趋势,在系统中自动引入一个有效的早期修正信号,从而加快系统的调整速度。
二、 预估补偿控制当系统中纯滞后环节(滞后时间比较大),会导致系统控制不及时,常规PID 控制、微分先行控制、中间反馈控制往往难以取得显著效果。
而预估计补偿控制按照大纯滞后的工业过程的特性,设想一种模型(补偿器)加到反馈控制系统中,力图使控制之后了τ的被控量提前反映到控制器上,使控制器提前动作,从而显著地减小或补偿了时滞给系统造成的不利影响,有效地降低了系统的超调量和过渡过程时间,提高了系统的控制质量。
过程控制系统课程设计任务书——锅炉(水位控制)
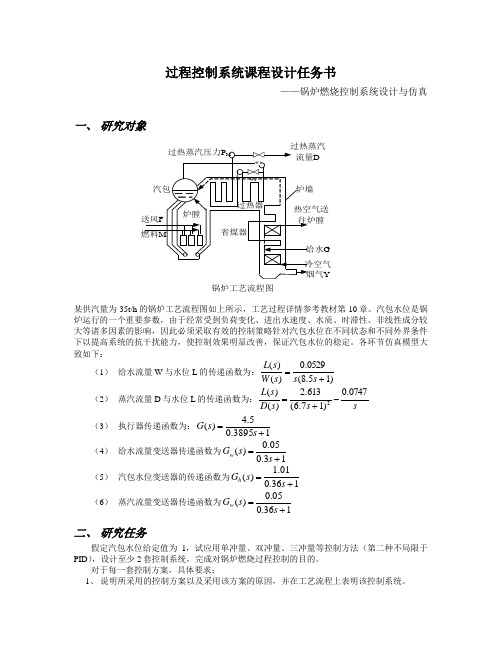
过程控制系统课程设计任务书——锅炉燃烧控制系统设计与仿真一、 研究对象某供汽量为35t/h 的锅炉工艺流程图如上所示,工艺过程详情参考教材第10章。
汽包水位是锅炉运行的一个重要参数,由于经常受到负荷变化、进出水速度、水质、时滞性、非线性成分较大等诸多因素的影响,因此必须采取有效的控制策略针对汽包水位在不同状态和不同外界条件下以提高系统的抗干扰能力,使控制效果明显改善,保证汽包水位的稳定。
各环节仿真模型大致如下:(1) 给水流量W 与水位L 的传递函数为:)15.8(0529.0)()(+=s s s W s L (2) 蒸汽流量D 与水位L 的传递函数为:ss s D s L 0747.0)17.6(613.2)()(2-+= (3) 执行器传递函数为:13895.05.4)(+=s s G (4) 给水流量变送器传递函数为13.005.0)(+=s s G w (5) 汽包水位变送器的传递函数为136.001.1)(+=s s G h (6) 蒸汽流量变送器传递函数为136.005.0)(+=s s G w 二、 研究任务假定汽包水位给定值为1,试应用单冲量、双冲量、三冲量等控制方法(第二种不局限于PID ),设计至少2套控制系统,完成对锅炉燃烧过程控制的目的。
对于每一套控制方案,具体要求:1、 说明所采用的控制方案以及采用该方案的原因,并在工艺流程上表明该控制系统。
D GY 锅炉工艺流程图2、确定所用控制器的正反作用,画出控制系统完整的方框图(需注明方框图各环节的输入输出信号),并选择合适的PID控制规律。
3、在SIMULINK仿真环境下,对所采用的控制系统进行仿真研究。
具体步骤包括:(1)在对象特性参数的变化范围内,确定各环节对象的传递函数模型,并构造SIMULINK对象模型;(2)引入手动/自动切换环节,在手动状态下对控制通道、干扰通道分别进行阶跃响应试验,以获得“广义对象”开环阶跃响应曲线;(3)依据PID参数整定方法,确定各控制器的参数;(4)在各控制器参数均保持不变的前提下,当对象特性在一定变化范围内发生变化时的响应曲线(鲁棒性);在发生干扰时系统的响应曲线(抗干扰能力)。
大范围变工况下锅炉–汽轮机非线性协调控制方法

大范围变工况下锅炉–汽轮机非线性协调控制方法发布时间:2021-02-24T14:35:03.793Z 来源:《基层建设》2020年第27期作者:谢云锋[导读] 摘要: 为解决传统锅炉–汽轮机非线性协调控制波特率低的问题,设计大范围变工况下锅炉–汽轮机非线性协调控制方法。
河北蔚州能源综合开发有限公司河北省张家口 075700摘要: 为解决传统锅炉–汽轮机非线性协调控制波特率低的问题,设计大范围变工况下锅炉–汽轮机非线性协调控制方法。
采集、处理锅炉–汽轮机非线性协调控制信号,分析锅炉–汽轮机非线性协调控制功率相关性,计算锅炉–汽轮机非线性协调控制频率,实现大范围变工况下锅炉–汽轮机非线性协调控制。
设计实例分析,结果表明,设计方法控制波特率明显高于对照组,能够解决传统锅炉–汽轮机非线性协调控制波特率低的问题。
关键词:锅炉;汽轮机;非线性; 协调控制中图分类号:TP343.7 文献标识码:A0引言:锅炉–汽轮机非线性协调控制是保证其稳定运行的有效手段,是近年来相关部门的重点研究内容。
在我国,针对锅炉–汽轮机非线性协调控制方法的研究中,普遍采用微分中值定理计算锅炉–汽轮机非线性协调控制频率,进而控制锅炉–汽轮机[1]。
但此种控制方法在实际应用中存在控制效率低的问题,主要原因为,运用微分中值定理计算锅炉–汽轮机非线性协调控制频率,需要将非线性协调控制问题转化为线性协调控制问题,进而保证锅炉–汽轮机非线性协调控制精度。
而在大范围变工况下,传统控制方法无法满足大范围变工况下控制效率的需求,必须直接通过非线性协调控制锅炉–汽轮机,保证锅炉–汽轮机非线性协调控制的实时性。
为弥补传统锅炉–汽轮机非线性协调控制方法中存在的不足,本文设计一种新型大范围变工况下锅炉–汽轮机非线性协调控制方法,致力于提高锅炉–汽轮机非线性协调控制波特率,在大范围变工况下实时协调控制锅炉–汽轮机。
1大范围变工况下锅炉–汽轮机非线性协调控制方法1.1采集、处理锅炉–汽轮机非线性协调控制信号在大范围变工况下,本文利用馈线终端装置,采集锅炉–汽轮机非线性协调控制信号,并将采集到的信号通过通讯网络传递到控制主站,由控制主站将分析上报的电压信号,确定锅炉–汽轮机非线性协调控制区段[2]。
大时滞过程的控制方法

大时滞过程的控制方法
大时滞过程的控制方法是一种非线性系统控制技术,它提出了一种新的理论框架来解决传统线性系统控制算法的技术局限性。
这种方法的核心是使用一种叫做“单元时间延迟”的量度来评价两个控制器之间的关系,这种测量方法能够更好地根据系统特性实现控制目标。
与传统的线性控制技术相比,大时滞过程的控制具有很多优势。
首先,它考虑了系统的动态特性,把这一点作为控制策略的考虑因素之一,从而使控制器能够更好地适应工况的变化。
其次,大时滞过程的控制以最小的扰动完成稳定的调整,比起传统的控制方法,这能够降低参数调整时造成的干扰。
同时,大时滞过程的控制能够有效抑制噪声干扰,这使得控制信号更加稳定有效。
大时滞过程的控制方法主要应用于非线性动态系统的控制,常用于如下场景:工业过程控制,飞行控制,中高空航空器控制,等等。
在上述场景中,大时滞过程的控制能够有效地降低系统的动态失灵和消偏作用,提高控制稳定性。
而且,大时滞过程的控制能够更加精准地实现控制目标,从而节省能源、降低成本。
总之,大时滞过程的控制方法具有较强的实用性,可用于更多复杂系统的控制和调节。
此外,与传统的控制方法相比,它更加先进、结构更加紧凑,具有良好的抗干扰能力以及准确的控制效果,是解决非线性动态系统的首选控制方案。
锅炉控制方案

锅炉控制方案锅炉控制方案引言锅炉是工厂、发电站等各类工程中常见的设备之一,负责产生高温蒸汽或热水供应给其他设备使用。
为了确保锅炉的正常运行和安全性,需要配备一套适当的锅炉控制方案。
本文将介绍一种常见的锅炉控制方案,以保证锅炉的稳定运行。
1. 控制策略锅炉的控制策略应包括主要的控制过程和相应的辅助控制过程。
主要的控制过程包括水位控制、压力控制和温度控制,辅助控制过程包括燃料控制和排烟控制。
1.1 水位控制水位控制是锅炉控制中最重要的一环,主要通过控制给水泵的进水量来实现。
水位过低会导致锅炉运行不稳定,甚至发生爆炸等严重事故;水位过高则会浪费能源,增加锅炉压力。
使用比例控制、微分控制和积分控制的组合可以实现精确的水位控制。
1.2 压力控制锅炉的压力控制要求在一定范围内维持稳定。
压力过低会导致供应蒸汽或热水的能力不足,压力过高则可能导致系统泄漏或损坏。
通常使用PID控制器来控制锅炉的压力,通过控制给水泵的进水量来调节锅炉压力。
1.3 温度控制锅炉的温度控制要求能够稳定控制燃烧过程和蒸汽或热水的温度。
温度过低会影响锅炉的效率,温度过高则可能导致锅炉热损失、燃烧不完全等问题。
常见的温度控制策略包括PID控制和模糊控制等。
1.4 燃料控制燃料控制是锅炉控制中的一个重要环节,要求能够精确控制燃料的供应量。
过少的燃料供应会导致燃烧不完全,过多则会浪费能源。
常见的燃料控制策略包括比例控制和反馈控制等。
1.5 排烟控制排烟控制主要是通过控制锅炉的排烟风扇和燃烧器来调整锅炉排烟量。
排烟量的控制需要同时考虑环境保护和能源利用的因素。
2. 控制系统设计为了实现锅炉的稳定运行和高效控制,需要设计一个合理的控制系统。
一个典型的锅炉控制系统包括传感器、执行器和控制器等组成。
2.1 传感器传感器用于监测锅炉的运行状态和参数,如水位传感器、压力传感器和温度传感器等。
这些传感器将锅炉的实时数据反馈给控制器,以便进行相应的调节。
2.2 执行器执行器用于控制锅炉的不同操作,如给水泵、排烟风扇和燃烧器等。
锅炉调试方案
锅炉调试方案清晨的阳光透过窗帘的缝隙,洒在键盘上,我慵懒地靠在椅背上,开始回忆那些年写作方案的日子。
今天,我要写一篇关于“锅炉调试方案”的文章,这可是我擅长的领域。
下面,就让我用意识流的方式,为大家展现一下我的思考过程。
一、项目背景咱们得了解一下项目背景。
这是一家位于我国某大型工业园区的热力公司,他们有一批新购进的锅炉设备。
为了确保锅炉的正常运行,提高热效率,降低能源消耗,公司决定对锅炉进行调试。
二、调试目标调试目标很简单,就是让锅炉达到最佳工作状态。
具体来说,就是确保锅炉的热效率、排放指标、运行稳定性等方面达到设计要求。
三、调试内容1.锅炉本体调试:检查锅炉本体结构、燃烧设备、辅助设备等是否完好,确保锅炉本体运行正常。
2.燃料系统调试:检查燃料供应系统、燃烧控制系统等是否正常,确保燃料燃烧充分。
3.烟气系统调试:检查烟气排放系统、除尘设备、脱硫设备等是否正常,确保烟气排放达标。
4.水系统调试:检查给水系统、排水系统、循环水系统等是否正常,确保锅炉水循环稳定。
5.电气控制系统调试:检查电气控制系统、保护装置等是否正常,确保锅炉安全运行。
四、调试步骤1.准备阶段:组织调试团队,明确分工,准备好调试所需的仪器、设备、工具等。
2.初步调试:对锅炉本体、燃料系统、烟气系统、水系统、电气控制系统进行初步检查,找出存在的问题。
3.详细调试:针对初步调试中发现的问题,进行详细检查,找出原因,制定解决方案。
4.解决问题:对发现的问题进行整改,确保锅炉各个系统正常运行。
5.验收阶段:对锅炉进行整体验收,确保锅炉达到设计要求。
五、调试注意事项1.调试过程中,要确保安全第一,严格遵守安全操作规程。
2.调试人员要具备相关专业知识和技能,确保调试质量。
3.调试过程中,要密切关注锅炉各个系统的运行状况,发现问题及时处理。
4.调试结束后,要对调试数据进行汇总、分析,为后续运行提供参考。
六、调试成果通过调试,锅炉各项指标达到设计要求,热效率提高,排放指标合格,运行稳定。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
从1957年,Smith预估器出现以来,人们在时滞系统的控制上做出了很多研究,出现了许多控制方法。
但大体上可以分为两大类:传统的控制方法和现代的控制方法。
传统的控制方法有:Smith预估器及其改进方法、微分先行算法、大林算法、PID算法、根轨迹算法、Bode展开法等。
Smith预估控制器用一个预估模型对时滞对象进行补偿得到一个无时滞的超前的被调节量反馈到控制器,使得整个系统的控制犹如没有时滞环节,是一种对时滞控制非常有效的方法。
Smith预估器的最大优点是将时滞环节移到了闭环之外,使控制品质大大提高。
它的缺点是过十依赖精确的数学模型,当估计模型和实际对象有误差时,控制品质会显著恶化,甚至发散;它的另一个缺点是对外部扰动非常敏感,鲁棒性差。
常规的Smith预估器难以在实际中得到应用。
在Smith预估器的基础上,许多学者提出了扩展型的或者改进型的方案,这些方案包括:多变量Smith预估控制,非线性系统的Smith预估器,改进的Smith预估器。
这些方法由于并没有减小对系统数学模型的依赖程度,因而同样也具有一定的局限性。
微分先行控制算法是在PID控制的基础上提出的。
在微分先行调节系统中,微分环节的输出包括了被调参数及其变化速度值,将它送入比例积分调节器中,使调节系统克服超调的作用加强了。
微分先行系统的超调量比较小,改善了时滞系统的抗干扰性能。
大林控制算法是在离散域控制器设计方法中,富有代表性的一种方法,是1968年由IBM 公司提出的。
大林算法是针对被控对象是带纯滞后的一阶或二阶惯性环节设计的控制算法。
但是达林算法的致命缺点是可能存在“振铃”现象,且对过程的模型误差比较敏感。
传统控制方法大多要依赖对象的准确模型。
然而随着科技发展与被控对象的复杂化,对于现有大范围多参数时变、大滞后、严重非线性和强耦合以及不确定系统,要建立精确数学模型非常困难,基于此,近二十年来发展了多种先进控制理论和技术。
先进的控制方法有:自适应控制法、神经网络控制、模糊控制、预测控制、变结构控制等;另外各种控制方法往往不是独立存在的,它们相互结合,优势互补,产生了一些对时滞控制更好的方法:例如模糊PID、神经网络PID、神经网络内模、神经网络Smith预估器、神经网络预测控制等。
在各种控制中,占主导地位的思想是去掉过程对象的时滞,这种去掉时滞的思想实质是超前预估,例如基于Smith预估思想的神经网络建模、利用神经网络的超前预估来弥补对象的滞后特性,从而达到较好的控制效果;预测控制也是利用超前的预估值来补偿对象的滞后特性。
另外,滑模变结构控制以其在滑动模态对摄动和外扰具有良好鲁棒性的特点,成为对非线性时滞系统进行有效控制的一种重要形式。
为了更好的解决问题理论工作者作了大量工作,提出了许多时滞的辨识方法。
瑞典的Bjoklund在文献[1]详细阐述了线性系统的时滞辨识方法。
有时域近似法、频域近似法、Laguerre域近似法、一步或两步显式方法、采样方法、纯面积方法、和高阶统计方法等。
对时滞进行辨识与估计是系统辨识与模型化的重要研究课题之一。
Reed等在文献[2]应用LMS算法来确定相关函数以估计输入与输出信号间的时滞。
Teng和Sirisena在文献[3]提出了扩展多项式以估计时滞的方法。
Lim和Macleod在文献[4]就IIR滤波器提出了一种自适应时滞跟踪方法。
Balestrino在文献[5]等则提出了一种稳态时滞估计策略。
然而几乎所有这些方法均是针对线性系统而提出的。
而大多数具有时滞的实际动态系统或多或少含有非线性,因此有必要研究针对非线性系统的时滞建模和估计方法。
文献[6]给出了多层感知器递归神经网络非线性时滞系统的时滞辨识方法。
文献[7]给出了非线性时变时滞系统的两种估计方法,分别称为直接和间接时滞在线估计方法,间接法将时滞估计看作非线性优化问题,而直接法则用神经网络构造时滞估计器来跟踪时滞的变化。
本毕业设计拟寻求一种正交神经网络,它的构成思想源于正交函数。
正交神经网络的处理单
元(神经元)之间满足正交关系。
它是一种全局收敛的神经网络,能够避免初始值的选择,网络层数的选择,和每层的神经元的确定等问题。
因此训练速度快,便于实现在线辨识。
本毕业设计对采用神经网络辨识非线性系统时滞的文献[7]进行深入分析,重点研究正交递归神经网络对非线性时滞系统的辨识和建模,进而进一步探讨了对非线性时滞系统输入阶次的辨识。
并对非线性时滞系统采用了d步超前预测模型的神经网络预测控制,介绍了非线性时滞系统的动态递归神经网络预测控制的两种控制模型:串并联模型和并联模型。
将并联模型的RTRL算法用于非线性时滞系统的神经网络预测控制。
[1] Bjoklund S. A survey and comparison of time-delay estimation methods in linear
systems. Linkoping Studies in Science and Techonology, Thesis No. 1061,
Department of Electrical Engineering, Linkoping University, 5E-581 83
Linkoping, Sweden, 2003.
[2] Reed F, Feintuch P, and Berahad N. Time-delay estimation using the LMS
adaptive filter-static behavior; dynamic behavior. IEEE Trans. Acoustics, Speech,
and Signal Processing, 1981,29(3): 561一576.
[3] Teng F C, and Sirisena H R. Self-tuning PID controllers for dead time processes.
IEEE Trans. Industrial Electronics, 1988, 35(1): 119-125.
[4] Lim T J, and Macleod M D. Adaptive algorithm for joint time-delay estimation
and IIR filtering. IEEE Trans. Signal Processing, 1995, 43(4): 841一851.
[5] Balestrino A, Verona F, and Landi A. On-line process estimation by ANNs and
Smith controller design. IEE Proc., Pt.D.Contr. Theory Appl., 1988, 145(2):
231-235.
[6] 陆燕,杜继宏,李春文.延迟时间未知的时延系统神经网络补偿控制.清华大
学学报,1998, 38(9): 67-69.
[7] Tan Y H. Time-varying time-delay estimation for nonlinear systems using neural
networks. Int. J. Appl. Math. Comput. Sci., 2004, 14(1): 63-68.。