基于自由摆的平板控制系统设计报告
基于自由摆的平板控制系统--我的设计
B组基于自由摆的平板控制系统参赛学校:参赛学生:指导老师:联系方式:基于自由摆的平板控制系统摘要本控制系统由核心控制模块、角度采样模块、电机驱动模块、液晶显示模块、键盘控制模块等部分组成。
经实验证明本控制系统设计的各项指标都满足大赛的基本部分和核心部分的要求,部分设计实现大赛发挥部分,符合大赛目的。
关键字:STC12C5A60S单片机、角度传感器、L297、L298控制芯片、步进电机。
Abstract一、总体方案比较与论证方案一、方案二、利用STC12C5A60S2单片机作为控制系统,由单片机内部的AD转换模块对角度角度传感器 摆杆θ θ摆杆 平板平板二、各模块设计介绍1、角度采集模块设计根据题目要求,要保持平板平衡,需利用角度传感器随时测量旋转角度,角度传感器和单片机的连接2、键盘控制模块3、核心控制模块本设计的核心控制模块主要是由STC12C5A60S2单片机组成。
图14、液晶显示模块5、电机驱动模块12U1A74LS0734U1B 74LS071110U1E74LS071312U1F74LS07RED1ORANGE2Y E L L O W3PINK4B L U E5STEP MOTOR4 PHASE+12VORANGE PINKYELLOWBLUEREDABCD三、测试方案与测试结果在完成后进行调试时,采用的方法是首先分别调试各单元模块,调通后在进行整机调试的方法。
1、摆杆转动角度的测试。
2、键盘控制模块的调试。
3、液晶显示模块的调试。
4、单片机程序的调试。
5、步进电机转动角度的调试。
6、对设计的整体测试。
四、结论我们的设计利用单片机STC12C5A60S2作为核心控制,通过采集角度传感器的实时电压,利角度传感器采集来的数据和步进电机的状态实时显示在液晶屏上面,以便我们能够对系统的整体运行状态进行监控。
五、参考文献:。
基于自由摆平板的控制系统
基于自由摆平板的控制系统浙江万里学院罗志强周伟凯张政指导老师胡江王阳摘要本系统基于Altera的MAXII FPGA和新华龙C8051F单片机,采用MMA7455加速度传感器进行摆杆释放感应,由MXD2020EL角度传感器进行数据采集,通过FPGA进行角度值测量,交由MCU进行数据的处理,产生一系列脉冲信号经L298N 驱动使步进电机工作。
通过按键选择完成不同的功能,完成自由摆平板的控制系统。
由于FPGA的测量频率高,并且使用两个传感器的加强了角度测量与定位的准确度,从而测得的角度值精确,操控性能优良,因此系统能够出色完成设计目标。
关键词:角度传感器;FPGA;单片机;电机1.系统方案选择自由摆控制系统主要由:主控模块、角度传感器模块、电源驱动模块、机械结构组成。
方案一:基于单片机为核心的控制系统,利用AD603芯片对电位器角度传感器(模拟型)进行电压采样,再经模数转换,将模拟的角度变为数字信号,通过单片机处理计算输出脉冲驱动步进电机。
方案二:使用基于Altera MAXII系列FPGA和新华龙的C8051主控芯片FPGA 在数据采样方面的优势是单片机无法比拟的,而单片机的数据处理能力FPGA同样无法取代。
两者结合,优势互补。
角度测量采用MXD2020EL,此芯片精确度高,操作简单。
利用MMA7455加速度传感器进行摆杆释放感应,MMA7455是一款数字输出、低功耗、紧凑型电容式微机械加速度计,具有信号调理、低通滤波、温度补偿、自测、可配置,通过中断引脚检测0g、以及脉冲等功能。
通过FPGA对MXD2020EL角度传感器产生的方波进行采样,转换成数字信号传给MCU。
MMA7455加速度传感器测量失重信号,通过SPI通信直接传给单片机进行数据处理。
通过一系列判断得出摆杆的状态控制步进电机的转动。
出于对可操作性,准确性和测试精度的考虑,我们选择了方案二。
2.理论分析和系统框架本设计通过MXD2020EL角度传感器捕获摆杆角度的变换,而模组可以使用单轴可以测量2个面的倾角±60°及使用双轴测量1个面内的0~360°的倾角,我们这里使用双轴测量一个面内的角。
基于自由摆的平板控制系统[001]
![基于自由摆的平板控制系统[001]](https://img.taocdn.com/s3/m/c8876da9951ea76e58fafab069dc5022aaea469e.png)
基于自由摆的平板控制系统引言自由摆是一个常见的物理系统,其在控制工程中具有广泛的应用。
本文将介绍基于自由摆的平板控制系统,包括系统的结构、控制器设计、实施与结果分析等内容。
系统结构平板控制系统由一个平板和一个自由摆组成。
平板通过悬臂连接到摆杆,而摆杆则通过铰链连接到固定的支架上。
摆杆上安装有传感器,用于测量摆杆的角度。
控制器根据测量值计算并控制平板的运动。
控制器设计平板控制系统的目标是使得平板保持水平,即控制摆杆的角度。
为了实现这个目标,我们设计了一个基于PID控制器的闭环控制系统。
PID控制器由比例项、积分项和微分项组成,分别负责控制系统的响应速度、稳态误差和稳定性。
比例项比例控制通过将当前误差乘以一个比例增益来产生控制量。
在平板控制系统中,比例项负责响应速度,即控制系统对误差的快速反应。
通过调整比例增益,我们可以控制系统的响应速度,但需要注意的是,如果比例增益设置过大,可能导致系统不稳定。
积分项积分控制通过对误差的累积进行控制。
在平板控制系统中,积分项负责消除稳态误差,即平板保持在水平位置时的偏差。
通过调整积分增益,我们可以减小或消除稳态误差,但需要注意的是,如果积分增益设置过大,可能导致系统不稳定。
微分项微分控制通过对误差的变化率进行控制。
在平板控制系统中,微分项负责增加系统的稳定性,防止系统产生过冲现象。
通过调整微分增益,我们可以控制系统的稳定性,但需要注意的是,如果微分增益设置过大,可能导致系统不稳定。
实施与结果分析为了实施基于自由摆的平板控制系统,我们首先搭建了实验装置,并进行了实验测试。
通过对实验数据的分析和处理,我们得到了系统的动态特性,并据此进行控制器参数的调整。
经过多次调参和测试,我们最终得到了一个稳定且快速响应的控制系统。
在平板保持水平的情况下,我们对系统进行了稳态误差分析,并对控制效果进行了进一步的验证。
结果分析显示,通过PID控制器,我们成功地控制了平板的运动,使其保持在水平位置。
基于自由摆的平板控制系统
基于自由摆的平板控制系统本系统以单片机为控制核心,采用增量旋转编码器实时采集自由摆旋转角度及方向,通过步进电机开环控制平板旋转角度,以实现控制要求。
此外,为方便实验和调试,专门设计了独立的单片机角度显示电路。
本设计以旋转编码器的脉冲触发单片机的中断来控制平板角度的调整,这种外部事件驱动的程序设计方法能够及时响应摆杆角度的变化,避免了复杂的定时采样程序设计,总体程序设计简洁,响应时间快,控制精度高。
在激光笔瞄准时采用了查表法,避免了单片机进行复杂三角函数运算造成的舍入误差对实验精度的影响,从而达到了在一个周期里电机精确旋转一周;平板角度调整速度快,8枚硬币滑动小无跌落;实时控制激光笔保持静态水平误差在1cm以内;动态控制误差在2cm以内的实验效果。
关键词:旋转编码器、定时采样、角度采样、精确控制。
一、引言系统设计任务为一种基于自由摆的保持平板平衡的控制系统。
基本要求是保持平板上硬币的平衡滑动小或滑落少,进一步的要求是让平板上激光笔射在靶纸上的光斑偏移量尽可能小。
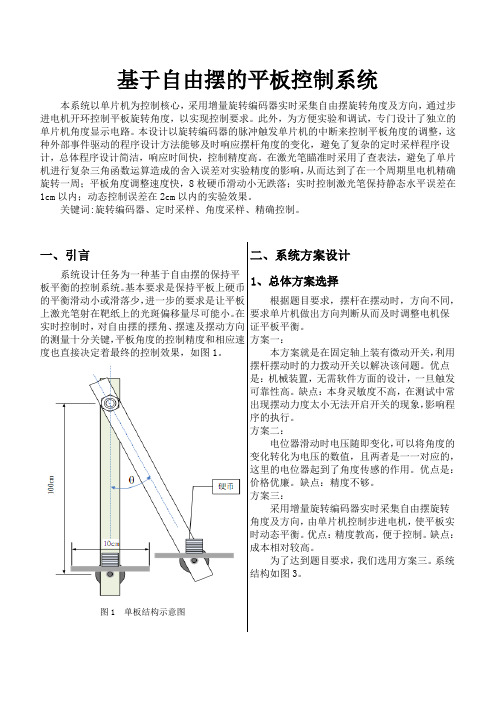
在实时控制时,对自由摆的摆角、摆速及摆动方向的测量十分关键,平板角度的控制精度和相应速度也直接决定着最终的控制效果,如图1。
图1 单板结构示意图二、系统方案设计1、总体方案选择根据题目要求,摆杆在摆动时,方向不同,要求单片机做出方向判断从而及时调整电机保证平板平衡。
方案一:本方案就是在固定轴上装有微动开关,利用摆杆摆动时的力拨动开关以解决该问题。
优点是:机械装置,无需软件方面的设计,一旦触发可靠性高。
缺点:本身灵敏度不高,在测试中常出现摆动力度太小无法开启开关的现象,影响程序的执行。
方案二:电位器滑动时电压随即变化,可以将角度的变化转化为电压的数值,且两者是一一对应的,这里的电位器起到了角度传感的作用。
优点是:价格优廉。
缺点:精度不够。
方案三:采用增量旋转编码器实时采集自由摆旋转角度及方向,由单片机控制步进电机,使平板实时动态平衡。
优点:精度教高,便于控制。
基于自由摆的平板控制系统设计学士学位论文
学士学位论文基于自由摆的平板控制系统设计姓名:颜芳学号:200905120342指导教师:李爱云院系(部所):光电工程学院专业:电子信息工程完成日期:2013年05月15日学士学位论文基于自由摆的平板控制系统设计姓名:颜芳学号:200905120342指导教师:李爱云院系(部所):光电工程学院专业:电子信息工程完成日期:2013年05月15日摘要本系统是STC12C5A60S2基于单片机为控制核心的平板控制系统。
通过单片机对MMA7455倾角传感器数据采集与处理,控制L298N电机驱动,调整57BYG 步进电机的转动,实现平板跟随自由摆的摆动而周期性旋转,可以通过控制平板运动使8枚叠放硬币在自由摆运动过程中静止。
在实现平板控制系统基本功能的同时,利用MMA7455倾角传感器实时检测自由摆摆动的角度,运用查表法实现激光笔照射中心线的功能。
在以上功能实现的同时使用TFT彩色液晶屏显示MMA7455倾角传感器的三轴变化情况,采用触摸键盘替代按键进行功能设定与选择,充分的体现了本系统的协调性与实用性。
关键词: STC12C5A60S2E;57BYG;MMA7455;TFT触摸屏AbstractThe flat control system is based on the single chip STC12C5A60S2 as control core. Through to MMA7455 inclination angle sensor data changeacquisition and processing, controls the L298N motor-driven to realize 57BYGto stepper motor's angle adjustment, achieve the flat periodic rotating with thewaver of free-pendulum. Through control the flat movement to prevent 8 piecescoins movement when the free pendulum motor processing.While realizes the flat control system basic function,use the MMA7455 inclination angle sensor detect the angle of the free-swinging pendulum, and use table look-up method realize the function of the laser pen illuminating the center line. Realizing the function of the above at the same time, demonstrates the MMA7455 inclination angle sensor's three axis change situation through the TFT colored touching liquid crystal module. Use touch-screen substitution pressed key carry on the different function settings and the choice and fully embodies the coordination and practical of the system in the end.Keyword: STC12C5A60S2, 57BYG, MMA7455, TFT torch screen目录第1章绪论 (1)第2章系统方案论证与比较 (2)2.1基本要求 (2)2.2论证与比较 (2)第3章理论分析与设计 (4)3.1平板状态测量方法 (4)3.1.1硬币的受力分析: (4)3.1.2平板状态分析: (5)第4章电路与程序设计 (6)4.1电路设计 (6)4.1.1.电源电路设计 (6)4.1.2 STC12C5A60S2最小系统 (7)4.2单元设计 (7)4.2.1主控板单元 (7)4.2.2驱动系统单元 (8)4.2.3数据采集单元 (10)4.2.4 LCD液晶显示单元 (10)第5章测试方案与测试结果 (12)5.1对于基本要求(1)的测试方案: (12)5.2对于基本要求(2)(3)的测试方案: (12)第6章总结 (13)参考文献 (14)致谢 (16)第1章绪论单片机是当今应用越来越广泛的一个装置,渗透到我们生活的各个领域,在1971年诞生以来,经历了SCM、MCU、SoC三大阶段,随着工业控制领域要求的提高和消费电子产品的大发展,单片机技术得到了飞速发展。
2011年电子设计竞赛_基于自由摆的平板控制系统【龙哥,尧总,portia】
基于自由摆的平板控制系统一、总体方案设计1.主控系统选择方案一:使用传统51单片机作为主控制器,价格低廉,但其运算速度慢,片内资源少,存储容量小,难以实现复杂的算法。
方案二:使用FPGA,CPLD等大规模可编程逻辑控制器件,其时钟频率很高,运算速度很快,但不适合于该题目。
方案三:使用基于ARM Cortex-M3内核的EasyARM1138单片机,它有8通道10位ADC,使用方便且低功耗。
方案比较:综合比较,选择方案三。
2.角度测量方案一:使用双轴倾角传感器SCA103T-D04,测量范围为±15度,可适用于垂直方向的各种角度的测量。
方案二:使用电位器作为角度传感器,由于不同角度输出的电阻值不同,通过AD采样电阻两端电压,计算得到角度。
方案三:使用Angtron-RE-38-V-Lite旋转编码器,角度测量范围为0~360°,根据不同角度,可直接输出不同的电压值,线性度好。
方案比较:对于方案一,虽然SCA103T精度较高,但它是基于加速度原理进行测量,使用SCA103T进行倾角检测时,应保证被测设备匀速运动,否则会引进误差,而在自由摆系统中,平板不是匀速运动。
虽然可以采用峰值滤波和一阶惯性滤波相结合的方式通过软件编程进行处理,但较繁琐。
对于方案二,对于一般的电位器,线性度较差,而对于线性度较好的电位器,如22HP-10等,价格较高。
对于方案三,使用该旋转编码器,可以直接对输出电压进行AD采样,计算得出角度值,使用方便。
综合考虑,选择方案三测量自由摆运动过程中的摆角。
3.电机选择方案一:使用伺服电机作为执行元件,运行精确,能高速制动,惯量小,适合闭环控制。
方案二:使用步进电机作为执行元件,由于步进电机是采用脉冲驱动,精度较高,适合开环控制。
方案比较:对于方案一,虽然伺服电机性能良好,但价格较高。
对于方案二,步进电机可以通过16细分可以减弱低频振动,控制方便,开环性能良好,可以适用于该设计。
基于自由摆的平板控制系统

基于自由摆的平板控制系统引言平板控制在工业自动化和机器人技术中具有广泛应用。
基于自由摆的平板控制系统可以通过控制平板的运动来实现对系统的控制以及稳定性的提高。
本文将介绍基于自由摆的平板控制系统的原理、设计和实现。
自由摆的基本原理自由摆是一个简单的振动系统,由一个固定在一端的杆和一个可以在杆上摆动的质点组成。
自由摆的振动受重力和摩擦力的影响。
通过控制摆动的角度和速度,可以实现对平板的控制。
基于自由摆的平板控制系统利用这一原理,通过控制摆动的力,使平板能够保持平衡或者按照指定轨迹移动。
平板控制系统的设计平板控制系统的设计涉及到以下几个方面:1. 传感器平板控制系统需要获取平板当前的角度和速度信息,以便进行控制。
常用的传感器包括陀螺仪和加速度计。
陀螺仪用于测量平板的角速度,而加速度计用于测量平板的加速度。
2. 控制算法基于自由摆的平板控制系统需要设计合适的控制算法来对平板进行控制。
常见的控制算法包括PID控制算法、模糊控制算法和神经网络控制算法等。
根据实际需求和系统性能要求,选择合适的控制算法进行设计和实现。
3. 执行机构平板控制系统需要一个执行机构来实现对平板的控制。
常用的执行机构包括电机和伺服驱动器。
电机用于提供动力,伺服驱动器用于控制电机的运动。
4. 控制器平板控制系统需要一个控制器来组织传感器、控制算法和执行机构的协调工作。
控制器负责接收传感器的数据,经过控制算法计算得到控制信号,然后通过执行机构实施控制。
平板控制系统的实现实现基于自由摆的平板控制系统需要按照以下步骤进行:1.硬件设计:确定所需传感器、执行机构和控制器,并设计相应的电路板和机械结构。
2.软件开发:编写控制算法和控制器的软件程序,进行传感器数据的读取和控制信号的输出。
3.系统集成:将硬件和软件进行集成,进行相应的调试和优化。
4.系统测试:对平板控制系统进行功能测试和性能测试,检验系统的稳定性和控制效果。
结论基于自由摆的平板控制系统是一种常见的控制系统,在工业自动化和机器人技术中具有广阔的应用前景。
基于自由摆的平板控制系统

基于自由摆的平板控制系统中文摘要:本系统设计了一个基于自由摆的平板控制系统,由传感器模块、控制驱动模块、电机执行机构和自由摆等部分组成的闭环控制系统。
角度测量使用三向加速度传感器MMA7361,主控板采用宏晶公司的单时钟周期的单片机STC12C5A60S2为控制核心,平板转动采用39HS02步进电机控制,控制规律采用PID控制算法。
根据加速度传感器测得摆杆与平板的当前角度,MCU控制步进电机转动,实现硬币平衡与激光笔的跟随靶线。
本文简单介绍了系统的组成和工作原理、理论分析与计算、硬件与软件设计,并给出了系统的电路。
测试结果表明:电机可以高精度的控制平板的转动,并实现了硬币不从平衡板上滑落和激光笔的光斑在静态和动态时偏离中心线的距离比较小。
关键词:加速度传感器,步进电机,平板控制,硬币,激光笔English abstract:The system designs a panel control system based on a free pendulum, is mainly formed by the sensor part, drive system, motor actuating mechanism and free pendulum frame. It is a closed loop control system. Tilt angles are measured by using a three axis accelerometer sensor MMA7361, the main control board adopts a singlechip STC12C5A60S2 which has single clock cycle of Hong Jing company as the core processor of the control system, The panel rotation are controlled by using the stepper motor 39HS02.The control rules uses PID control algorithm. According to the present angles which are measured by accelerometer sensor between free pendulum and flat, stepper motor rotation are controlled by MCU, realizing the functions of coins balance and laser pen following target line. This thesis simply introduces the system composition and working principle, theoretical analysis and calculation, designs of hardware and software, the system circuits are drawn. The testes results show that, the panel rotated are controlled by motor with high accuracy, the coins don’t slide off the balance panel, the laser pen don’t deviate from the center line.Keywords:accelerometer sensor, stepper motor, panel control, coins, laser pen一、方案论证与理论分析1. 平板状态测量与调整 (1)硬币平衡为了平衡板上的硬币不滑落,方案如下:方案一:当硬币所受合力为零时,即当摆杆自由摆动时,平板与水平面时刻保持平行,如此,可以检测平板与水平面的夹角,对平板开环控制,以调整角为零。
基于自由摆的平板控制系统设计报告

基于自由摆的平板控制系统设计报告摘要基于自由摆的平板系统设计是设计基于STC12C5A6S2为核心的控制系统,采用电位器作为角度传感器采集自由摆倾角的信息,采用步进电机作为调整平板,当摆角变化时,电位器传给单片机内部AD一个电压值,单片机通过内部计算,得出角度值,通过角度值,计算出相应指令给传给L298N控制步进电机运转来调整平板,实现平板控制系统与摆杆的协调。
一、系统设计1.1设计要求a。
控制电机使平板可以随着摆杆的摆动而旋转(3~5 周),摆杆摆一个周期,平板旋转一周(360º),偏差绝对值不大于45°。
b。
在平板上粘贴一张画有一组间距为1cm 平行线的打印纸。
用手推动摆杆至一个角度θ(θ在30º~45º间),调整平板角度,在平板中心稳定放置一枚1 元硬币(人民币);启动后放开摆杆让其自由摆动。
在摆杆摆动过程中,要求控制平板状态,使硬币在5 个摆动周期中不从平板上滑落,并尽量少滑离平板的中心位置.c.用手推动摆杆至一个角度θ(θ在45º~60º间),调整平板角度,在平板中心稳定叠放8 枚1 元硬币,见图2;启动后放开摆杆让其自由摆动。
在摆杆摆动过程中,要求控制平板状态使硬币在摆杆的5 个摆动周期中不从平板上滑落,并保持叠放状态.根据平板上非保持叠放状态及滑落的硬币数计算成绩。
d.如图3 所示,在平板上固定一激光笔,光斑照射在距摆杆150cm 距离处垂直放置的靶子上。
摆杆垂直静止且平板处于水平时,调节靶子高度,使光斑照射在靶纸的某一条线上,标识此线为中心线。
用手推动摆杆至一个角度θ(θ在30º~60º间),启动后,系统应在15 秒钟内控制平板尽量使激光笔照射在中心线上(偏差绝对值<1cm),完成时以LED 指示。
根据光斑偏离中心线的距离计算成绩,超时则视为失败.二、系统方案的选择与论证2。
1 整体方案基于自由摆的平板控制系统选用STC12C5A6S2为核心的控制系统,采用电位器作为角度传感器采集自由摆倾角的信息,采用步进电机作为调整平板,当摆角变化时,电位器传给单片机内部AD一个电压值,单片机通过内部计算,得出角度值,通过角度值,计算出相应指令给传给L298N控制步进电机运转来调整平板,实现平板控制系统与摆杆的协调2。
基于自由摆的平板控制系统

基于自由摆的平板控制系统
基于自由摆的平板控制系统是一种将自由摆与平板结合的
控制系统,通过控制自由摆的运动,实现对平板的控制。
这种控制系统可以广泛应用于机器人控制、无人机控制、
航天器控制等领域。
在这种控制系统中,平板通常被固定在一个基座上,自由
摆则被安装在平板上。
自由摆通常由一个摆杆和一个负载
物组成,负载物的位置会影响平板的姿态。
通过改变自由
摆的位置和角度,可以控制平板的姿态。
控制自由摆的运动可以通过多种方式实现,常用的方法包
括PID控制、模糊控制、神经网络控制等。
这些控制方法
可以根据系统的要求和性能进行选择和调整,以实现精确
的平板控制。
此外,为了实现更加稳定和准确的平板控制,还可以结合
传感器和反馈系统。
通过加入陀螺仪、加速度计等传感器,
可以实时监测平板的姿态,并将反馈信号送回控制系统进行调整。
这样可以提高系统的稳定性和精度。
总的来说,基于自由摆的平板控制系统是一种灵活且高效的控制方法,能够实现对平板的精确控制。
它在很多应用中都能发挥重要的作用,特别是在需要保持平板姿态稳定的场合。
基于自由摆的平板控制系统
产品与解决方案2012年第4期 87基于自由摆的平板控制系统王 宁 段卓琳 周 叶(大连海事大学轮机学院,辽宁 大连 116026)摘要 本论文采用角度传感器,运算放大器,AD 转换器采集平板变化信息,通过单片机,产生脉冲信号,控制电机模块驱动步进电机带动平板转动,摆杆角度越大步进电机转过的角度越大,从而控制平板状态基本保持水平,实现自由摆得平板控制。
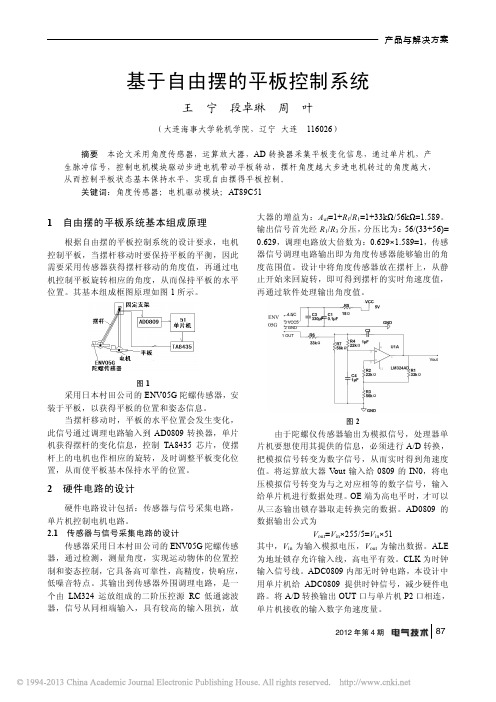
关键词:角度传感器;电机驱动模块;AT89C511 自由摆的平板系统基本组成原理根据自由摆的平板控制系统的设计要求,电机控制平板,当摆杆移动时要保持平板的平衡,因此需要采用传感器获得摆杆移动的角度值,再通过电机控制平板旋转相应的角度,从而保持平板的水平位置。
其基本组成框图原理如图1所示。
图1采用日本村田公司的ENV05G 陀螺传感器,安装于平板,以获得平板的位置和姿态信息。
当摆杆移动时,平板的水平位置会发生变化,此信号通过调理电路输入到AD0809转换器,单片机获得摆杆的变化信息,控制TA8435芯片,使摆杆上的电机也作相应的旋转,及时调整平板变化位置,从而使平板基本保持水平的位置。
2 硬件电路的设计硬件电路设计包括:传感器与信号采集电路,单片机控制电机电路。
2.1 传感器与信号采集电路的设计传感器采用日本村田公司的ENV05G 陀螺传感器,通过检测,测量角度,实现运动物体的位置控制和姿态控制,它具备高可靠性,高精度,快响应,低噪音特点。
其输出到传感器外围调理电路,是一个由LM324运放组成的二阶压控源RC 低通滤波器,信号从同相端输入,具有较高的输入阻抗,放大器的增益为:A uf =1+R f /R 1=1+33k Ω/56k Ω=1.589。
输出信号首先经R 1/R 3分压,分压比为:56/(33+56)= 0.629,调理电路放大倍数为:0.629×1.589=1,传感器信号调理电路输出即为角度传感器能够输出的角度范围值。
设计中将角度传感器放在摆杆上,从静止开始来回旋转,即可得到摆杆的实时角速度值,再通过软件处理输出角度值。
B-基于自由摆的平板控制系统

方案一:采用超低功耗单片机MSP430单片机作为 控制器。MSP430单片机具有较高的处理速度,中 断源较多,并且可以任意嵌套,使用时灵活方便。 但是该单片机通用性较差,性价比相对较低。
方案二:采用51系列单片机,51单片机是比较常用 的8位单片机,MCS-51以其典型的结果和完美的 总线专用寄存器的集中管理,众多的逻辑位操作功 能及面向控制的丰富指令系统,开发简单,价格低 廉通用性好等特点被广泛应用。但其速度不快,12 振荡周期才执行一个单周期命令,适合应用与小型 的控制领域和精度要求不高的环境中,由于其速度 较慢,因此在用于速度要求高的地方,51单片机并 不是最佳的选择。此外,51单片机的耗电比较大。
设计2:
在平板上粘贴一张画有一组间距 为1cm平行线的打印纸。用手推动摆杆 至一个角度Ɵ( Ɵ在30°~45°间)调 整平板角度,在平板中心稳定放置一枚1 元硬币;启动后放开摆杆让其自由摆动。 在摆杆摆动过程中,要求控制平板状态, 使硬币在5个摆动周期中不从平板上滑落, 并尽量少滑离平板中心位置。
Delay_ms(i); AB; Delay_ms(i); BB; Delay_ms(i); BC; Delay_ms(i); CC; Delay_ms(i); CD; Delay_ms(i); DD; Delay_ms(i); DA; Delay_ms(i);} Delay_ms(i); DD; Delay_ms(i); CD; Delay_ms(i); CC; Delay_ms(i); BC; Delay_ms(i); BB; Delay_ms(i); AB; Delay_ms(i); AA; Delay_ms(i);}
激 光 瞄 准 过 程
(1)静态性能测试 用手推动摆杆摆起一定的角度Ɵ( Ɵ 在 30°~45°间),利用倾角传感器提供的当前平板 与水平位置的角度,处理器计算出恢复平衡位置所 需要的脉冲个数并发送给步进电机,电机收到驱动 信号后带动平板反方向转动,到达平衡位置时停止 转动。反复调整,确定使步进电机能迅速反应且稳 定工作的运行频率,使平板能尽快恢复水平状态及 其他状态。
基于单片机自由摆平衡板控制系统设计

基于单片机自由摆平衡板控制系统设计自由摆平衡板是一种利用现代科技与物理原理相结合的新型运动设备,它既具有娱乐性又有锻炼身体的功效。
随着社会的进步和科技的发展,越来越多的人开始注重健康和运动,因此自由摆平衡板成为了一种受欢迎的运动方式。
然而,一台稳定、高效的自由摆平衡板需要先进的控制系统来实现。
在当前的科技环境下,单片机作为一种主控芯片,被广泛应用于各类控制系统中。
在自由摆平衡板控制系统设计中,单片机扮演了至关重要的角色。
单片机可以通过内置的模拟输入输出接口来感知摆板的状态,通过程序设计来控制电机的转速,从而实现平衡板的平衡。
单片机不仅能够提高自由摆平衡板的稳定性,还可以实现各种功能,如倾斜角度检测、速度控制等。
因此,基于单片机的自由摆平衡板控制系统设计成为了一种创新且高效的解决方案。
为了实现自由摆平衡板控制系统的设计,首先需要对自由摆平衡板的原理和结构有充分的了解。
自由摆平衡板主要由底座、摆板、传感器、电机等部件组成。
底座是支撑整个设备的主体结构,摆板则是承载用户并进行倾斜运动的平台。
传感器用于感知摆板的倾斜角度,电机则用于根据传感器的信号来实现自由摆平衡板的控制。
在系统设计的初期,需要对这些部件的性能和工作原理进行详细的分析和测试。
在控制系统设计的过程中,需要考虑到摆板的倾斜角度、速度和加速度等因素。
单片机可以通过内置的PID控制算法来实现对这些参数的准确控制,从而实现对自由摆平衡板的实时控制。
PID控制算法是一种经典的反馈控制算法,通过调节比例、积分和微分三个参数来实现对系统的稳定性和响应速度的优化。
在自由摆平衡板控制系统设计中,PID控制算法的应用可以大大提高系统的稳定性和控制精度。
除了PID控制算法,单片机还可以通过其他高级控制算法来实现自由摆平衡板的控制。
例如,模糊控制算法可以在一定程度上提高系统的适应性和鲁棒性,神经网络控制算法可以实现对系统的自学习和自适应。
这些高级控制算法的应用可以进一步提升自由摆平衡板控制系统的性能和智能化水平。
基于自由摆的平板控制系统设计

图2重力分解示意图
1 系统 分析
由于 自由摆在运动过程中 ,运动方 向上重力分量 会 随摆臂与轴线 的夹角 的改变而改变 ,其大小为 :
=
Gc s o0
若 图2 所示 为系统起始位置 ,此时硬 币在 系统运 动轨迹方 向上无 自 身的重力分量 ,由于运动惯性 ,硬币必会掉落平板。当平板与摆臂成垂 直位 置时 , 每个硬 币的重力分量模式 与 自由摆 的一致 ,在运 动轨迹上形 成 与 自由摆一致 的运动 ,硬币就不会掉下来 。
赫霸
应 用 方 法 论
1 7 5
基 于 自由摆 的平板控制 系统设计
赵旭 峰
( 陕西理工学 院电气 工程学 院,陕 西汉 中 7 3 0 ) 200
摘 要 设计 以sc 2 5 6 s单片机 作为基 于 自由摆 的平板控制 系统 的处理 器 ,通 过M 76力速度 传感器对 摆杆的位移 、运动方 向进行 T lc A 02 MA 3 1Ⅱ
检测 ,利用 单片机 产生P wM波控 制步进 电机运动 ,实现摆动 过程 中8 个硬 币在平板上 的稳定 。 关键 词 SC1C A 0 2 自由摆 ;加速度传感 器 ;步进 电机 T 2 5 6S ;
中 图分 类号 T 文 献标 识码 A P 文 章编 号 17— 61(0 1 0— 15 0 6 397 一 1) 20 7— l 2 1
2 1年全 国大学生 电子设计竞赛 B 0 1 题——基 于 自由摆的平板控制系 统 中有一要求 :用手推动摆杆至一个角度 (  ̄4 。~ 0 间 ), o 5 6。  ̄ 调整平 板 角度 ,在平板 中心稳定叠放8 1 枚 元硬币 ,启动后放开摆杆让其 自由摆 动 。在摆杆摆动过程 中,要求控制平板 状态使 硬币在摆杆的5 个摆动周 期 中不从平板上滑落 ,并保持叠放状态。如 图1 。 所示
基于自由摆的平板控制系统设计
基于自由摆的平板控制系统设计摘要:本系统采用8位精简指令集高性价比的ATmeag32单片机作为主控芯片,利用步进电机驱动平板的转动。
模拟倾角传感器WQ36-90实现摆杆摆角的测量,三轴数字加速度传感器MMA7455模块实现平板倾角的测量。
利用延时方式对步进电机进行精确无重叠的控制,配合2个传感使整个系统构成闭环控制系统。
系统的功能切换靠4位拨码开关实现,部分触发功能利用按键进行触发。
系统配备LED和蜂鸣器作为声光指示,12864液晶屏用于显示调整时间和文字提示等功能,整体构成一个良好的人机交互界面。
整个系统在程序的协调下正常稳定的运行,较精确的达到了题目的各项指标要求。
关键字:自由摆控制,ATmeag32,步进电机,倾角传感器WQ36-90,三轴加速度传感器MMA7455,闭环系统一、方案论证与比较1.系统控制方案论证与比较方案一:开环控制方式系统只采用1个倾角传感器测量摆杆摆角,再利用三角函数关系得到电机转角,即平板转角。
这种控制方式的主要优点是系统软硬件的设计相对简单,但对于材料形变、摆杆尺寸及电机安装精度等诸多因素引起的误差系统没有自适应性,难于进行实时校正。
一旦运行时间较长,系统误差积累将导致控制失败。
方案二:闭环控制方式系统采用2个角度传感器:一个用于测量摆杆的摆角,另一个用于测量平板倾角。
2个传感器构成闭环的控制系统,使系统产生的各种误差都能通过2个传感器的相互对比校正加以消除,从本质上解决系统误差的影响。
对比以上两方案,考虑到系统控制精度要求高,因此选用方案二构建系统。
2.模块方案论证与比较2.1主控芯片方案一:选用51系列单片机51系列单片机具有开发简单、资料和应用实例丰富、技术成熟以及价格低廉等优势,但是由于采用的是复杂指令集,限制了其运行速度,并且系统资源很少。
片上没有集成时下常用的SPI、I2C、ADC等接口或功能,这大大的限制了它的使用范围。
因此,51单片机只适用于一些精度要求不高,对成本敏感的控制场合。
基于自由单摆的平板控制系统的设计报告

基于自由摆的平板控制系统(B 题)摘要:根据平板控制系统的设计要求,对系统方案进行分析,确定设计构架和组成,选用STC12C5A32S2单片机做系统的控制芯片;采用PWM脉宽角度传感器采集角度,通过处理角度值的变化确定摆的状态和位置,实现对系统的实时监测可控制;平板的控制要求极高的电机步进角控制和高精度的角度传感器,通过高精度两相步进电机42BYG250B来实现实时跟踪摆的摆动;通过充分比较、论证,最终选用两相混合式步进电机细分驱动器SH-20403,输入信号光电隔离解决信号干扰问题,操作简单、控制能力强、适应较宽的电压范围;电机控制采用PWM 高速脉冲控制,解决了步进机的抖动问题,在速度和消抖和控制步进角三个参数之间得到较好匹配。
系统采用模块化设计,容易搭建,适合短时间实现任务目标。
关键词:STC12C5A32S2,二相步进电机,PWM脉宽角度传感器,PWM Abstract: According to the design of the control system of flat requirement of system analysis to determine whether the design scheme, structure and composition, choose STC12C5A32S2 SCM system control chip do; The control requirements of flat high motor stepping Angle control and high accuracy, high precision Angle sensor through two phase step motor BYG250B 42 to realize real-time tracking control of the pendulum, swinging; Through the full comparison, reasoning, finally choose two mix try stepping motor subdivision driver SH-20403, the input signal photoelectric isolation, simple operation, strong ability to control, adapt to a wide range of voltage; Using PWM pulse width Angle sensor, through the processing Angle Angle collection of the values of the change of state and determine place position, realize to the system real time monitoring can control; Motor control using PWM high-speed impulse control, solve the dithering of stepping machine in the speed and away shaking and controlling the step Angle between three parameters to get a good match. System USES modular design, build, and suitable for the period of time to achieve goal.Keywords:STC12C5A32S2,Two phase step motor,PWM Pulse width Angle sensor,PWM一、设计任务及要求1.1 设计任务1.1.1控制电机使平板可以随着摆杆的摆动而旋转(3~5 周),摆杆摆一个周期,平板旋转一周(360º),偏差绝对值不大于45°。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2011年全国大学生电子设计竞赛基于自由摆的平板控制系统(B题)【本科组】参赛学校:南京农业大学参赛队编号:025181参赛队员:顾林馨、王和声、张翔宇指导教师:沈明霞、徐进20201111年9月3日摘要:本系统采用STM32F103VE作为核心处理芯片,对自由摆角度信号进行实时采集和处理,从而实现平板控制。
它采用增量式旋转编码器检测摆杆的旋转角度并将角度信号传送至STM32F103VE处理器,然后处理器根据角度信号控制伺服电机的旋转角度,最终使得平台上的硬币处于受力平衡状态或激光笔在屏幕上聚焦于一点,满足题目要求。
关键词:STM32F103VE,增量式旋转编码器,伺服电机Abstract:The system uses STM32F103VE as the core processing chip,collecting andprocessing the signal of the angle sensor.Incremental rotary encoder detects the pendulum rod rotation angle and the angle signal is transmitted to the STM32F103VE processor,the processor controls servo motor rotation angle according to the angle signal,and makes the platform on the coin at the equilibrium condition of forces or laser pen on the screen to focus on one point,meeting the requirements of title.Key words:STM32F103VE,incremental rotary encoder,servo motor目录1系统方案 (1)1.1系统方案论证与选择 (1)1.1.1处理器模块的论证与选择 (1)1.1.2角度检测模块的论证与选择 (1)1.1.3电机模块的论证与选择 (2)1.2系统硬件结构设计 (2)2系统理论分析与计算 (3)2.1系统建模与计算 (3)2.1.1硬币不滑落的建模与计算 (3)2.1.2激光笔照射中心线的建模与计算 (3)2.2平台状态测量与控制方法 (4)2.2.1摆杆摆动角度的测量方法 (4)2.2.2平台旋转角度的控制方法 (4)2.2.3角度传感器向电机的信息传递 (4)3电路与程序设计 (4)3.1电路的设计 (4)3.1.1平台控制子系统电路框图和原理图 (4)3.1.2系统输入和显示原电路理图 (5)3.2程序的设计 (6)3.2.1程序功能描述与设计思路 (6)3.2.2程序流程图 (6)4测试方案与测试结果 (7)4.1测试方案 (7)4.2测试条件与仪器 (7)4.3测试结果及分析 (7)4.3.1主要测试结果 (7)4.3.2测试分析与结论 (8)5参考文献 (8)附录1:主要元器件清单 (9)附录2:电路原理图 (9)附录3:完整测试结果 (10)附录4:主要源程序 (10)基于自由摆的平板控制系统(B题)1.系统方案1.1系统方案论证与选择本系统主要由处理器模块、角度检测模块和电机模块组成,下面分别论证这几个模块的选择。
此外,对于键盘输入模块和显示模块,因为结构简单,所以不再进行详细论证。
1.1处理器模块的论证与选择1.1.1.1方案一:采用AT89C51系列单片机作为控制的核心。
51单片机应用广泛,品种繁多,按单纯的控制和数据处理是比较经济实惠的。
但是冯诺依曼总线结构使51内核单片机运算速度较低。
另外,几种常用的51单片机内部资源较少,完成系统功能较为困难。
方案二:采用FPGA作为控制核心。
FPGA速度快、稳定性高、扩展性能好、体积小,可以提供丰富的逻辑单元和I/O资源,采用并行的输入/输出方式,可以达到很高的速度。
但是FPGA成本较高,算术能力不强。
方案三:采用STM32F103VE系列单片机作为控制核心。
STM32是意法半导体公司生产的基于Cortex-M3内核的32位ARM嵌入式处理器。
Cortex-M3核性价比更高,价格低,可以与8位单片机竞争。
由于采用了最新的设计技术,它的门数更低,性能却更强,处理速度更快,完全满足了本设计所要求的很高的精密度和快速的处理速度。
综合以上三种方案,选择方案三。
1.1.1.1.1.22角度检测模块的论证与选择方案一:采用MMA7455加速度传感器检测平台倾角。
其核心为飞思卡尔公司的MMA7455L数字三轴加速度传感器,它体积小,工作可靠。
但其8位模式还是限制了其测量精度,在测量微小的角度变化上存在误差。
方案二:采用电位器检测摆杆倾角。
用电阻分压方式可以实现电位器对角度变化的感应,但必须经过模数转换才能将信号传给处理器处理。
此时,电位器的灵敏度和模数转换器的精度都会对测量结果产生直接影响,误差一般很大。
方案三:采用增量式旋转编码器检测摆杆倾角。
增量式旋转编码器的转轴旋转时,有相应的脉冲输出,其计数起点任意设定,可实现多圈无限累加和测量。
需要提高分辨率时,可利用90度相位差的A、B两路信号进行倍频或更换高分辨率编码器。
2000线的编码器转轴旋转一周可以输出2000个脉冲,可以实现极高精度的角度检测。
综合以上三种方案,选择方案三。
1.1.1.1.1.33电机模块的论证与选择方案一:采用步进电机控制平台旋转。
步进电机作为一种开环控制的系统,和现代数字控制技术有着本质的联系。
在目前国内的数字控制系统中,步进电机的应用十分广泛。
但是不经细分的步进电机控制精度不高,速度响应也较慢。
方案二:采用伺服电机控制平台旋转。
在伺服系统中控制机械元件运转的发动机是一种补助马达间接变速装置。
伺服电机可控制速度,位置精度非常准确。
它将电压信号转化为转矩和转速以驱动控制对象。
伺服电机在控制精度、低频和矩频特性、过载能力、运行和速度响应性能等方面都优于步进电机。
综合考虑采用方案二。
1.2系统硬件结构设计图1系统总体结构框图系统以STM32F103VE作为核心处理芯片,包括角度检测模块、键盘输入模块、电源模块、电机模块、显示模块和声音提示模块等功能模块,该系统的总体结构框图如图1所示。
各模块的具体功能如下:角度检测模块:该模块利用增量式旋转编码器实现对摆杆倾斜角度的实时监测,并将信息反馈给处理器。
键盘输入模块:该模块利用键盘按键实现系统程序的切换。
电机模块:该模块利用伺服电机实现对旋转平台的实时控制。
显示模块:该模块利用LED灯实现信息的显示。
2系统理论分析与计算2.1系统建模与计算图2硬币不滑落的系统模型图3激光笔照射中心的系统模型2.1.1硬币不滑落的建模与计算如图2所示,设当摆杆倾角为θ时,平台与水平方向的夹角为α。
对硬币进行受力分析,其合力为自身重力与离心力这两个力的合力。
若硬币不掉,则平台平面与合力方向垂直。
由此可建立平面几何模型,求得α与θ的关系。
具体计算如下:在△ABC 中,利用余弦定理求得AC=[(mg)2+(m ω2)2﹢2m 2g ω2cos θ]1/2。
其中,ω=d θ/dt 。
再利用正弦定理得α=arcsin[r ω2sin θ/(g 2+ω2+2g ω2cos θ)1/2]。
由于平台转动θ角后水平,所以硬币不滑落的平台旋转角度为(θ-α)度。
2.1.2激光笔照射中心线的建模与计算如图3所示,设当摆杆倾角为θ时,激光笔发射的激光光线与水平面的夹角(也是平台与水平面的夹角)为β。
由此可建立平面几何模型,求得β与θ的关系。
具体计算如下:在△ABC 中解得AC=2sin (θ/2)。
在△ACD 中,利用余弦定理可解得CD=(17/4-2cos θ-3sin θ)1/2。
再由正弦定理得∠β=arcsin ﹛[AC ×sin(θ/2)]/CD ﹜=[(1-cos θ)/(17/4-2cos θ-3sin θ)1/2]。
由于平台转动θ角后水平,所以当转到靠近靶子一侧时平台转动角度为(θ+β)度;当转到远离靶子一侧时平台转动角度为(θ-β)度。
BA CD ABC2.2.22平台状态测量与控制方法2.2.2.2.2.11摆杆摆动角度的测量方法如图4所示,增量式旋转编码器固定在图中A 处,编码器转轴与摆杆轴承相连,可以实时监测摆杆旋转角度θ。
编码器转轴旋转一周产生2000个脉冲,处理器通过检测接受脉冲的个数测量摆杆旋转角度。
2.2.22.2平台旋转角度的控制方法如图4所示,伺服电机固定在图中B图4机械结构示意图处,电机转轴与平台中心轴相连,可以实时控制平台旋转角度。
伺服电机接受4000个脉冲旋转一周,电机通过处理器发送的脉冲个数控制平台的旋转角度。
2.2.22.3角度传感器向电机的信息传递如图5所示,因为编码器的检测与电机的控制都依靠脉冲的个数且前者与后者一图5信息传递过程周的脉冲比为1:2,所以只要控制好脉冲个数就能实现角度传感器向电机的信息传递。
以两者同步等角旋转为例,处理器只需将接收到的编码器的脉冲个数乘以二发送给电机即可。
3电路与程序设计3.1电路的设计3.1.1平台控制子系统框图和电路原理图H 38S 612345+V C C G ND A C B S T M 32F 103V E P B 6P B 7P A 1P A 8+V C C G N D H C -P Q 13A B 1234图6平台控制系统框图图7平台控制系统框图3.1.3.1.22系统输入和显示子系统电路原理图图8系统输入和显示子系统电路图编码器H38S6伺服电机HC-PQ133.2程序的设计3.2.1程序功能描述与设计思路1、程序功能描述(1)实现摆杆摆动一个周期,平台旋转一周。
(2)实现8枚硬币在摆动中不滑落。
(3)实现摆动中激光笔照射中心线。
2、程序设计思路(1)用按键控制三个程序的切换。
(2)将处理器接收的脉冲经计算后传给电机。
3.2.2程序流程图图9程序主流程图4测试方案与测试结果4.1测试方案1、硬件测试:测试机械部分能否正常工作,各项参数是否准确。
同时,检查电路焊接是否正确,各部分接线是否正确。
2、软件仿真测试:用Multisim软件对电路进行仿真3、硬件软件联调:用实现的编程算法控制硬件系统进行工作。
检测整个系统是否实现各项要求。
4.2测试条件与仪器测试条件:检查多次,机械部分必须正常工作且参数正确。
仿真电路和硬件电路必须与系统原理图完全相同,并且检查无误,硬件电路保证无虚焊。
测试仪器:数字存储示波器、量角器、尺子、秒表。
4.3测试结果及分析4.3.1主要测试结果(1)摆杆摆动一周期平台旋转一周,经五周期后的角度偏差:(单位:度)试验次数第1次第3次第5次平均值角度偏差28201922表1(2)一枚硬币摆动1周期后挪动距离(单位:毫米)最大角度30度35度40度45度平均距离1244表2(3)8枚硬币摆动5周期后的剩余个数:(单位:个)最大角度45度50度55度60度平均个数8877表3(4)固定角度激光笔照到中心线的时间:(单位:秒)固定角度30度40度50度60度平均时间11121111表4(5)激光笔斑点与中心线的最大距离(单位:毫米)起始倾角30度40度50度60度平均距离57910表54.3.2测试分析与结论根据上述测试数据可以认为,该系统满足各项要求。