链式玉米精量播种机的设计与试验
播种机的研究与设计
玉米播种机毕业设计

玉米播种机毕业设计玉米播种机毕业设计随着农业技术的不断发展和进步,农业机械化已经成为现代农业的重要组成部分。
在农作物种植中,播种是关键的一环。
而针对玉米这一重要农作物,设计一台高效、智能的玉米播种机成为了当前农业机械设计领域的热门课题。
本文将探讨玉米播种机的毕业设计。
一、背景介绍玉米是我国重要的粮食作物之一,而玉米播种作为玉米种植过程中的关键环节,直接影响着玉米产量和质量。
传统的玉米播种方式存在种植密度不均匀、劳动强度大等问题,因此设计一台高效、智能的玉米播种机势在必行。
二、设计目标设计一台高效、智能的玉米播种机,旨在提高播种效率、降低劳动强度、保证种植密度均匀。
同时,该播种机还应具备自动化控制、智能操控等功能,以适应现代农业的发展需求。
三、设计原理玉米播种机的设计原理主要包括播种装置、种子供给装置、行走装置和控制系统。
播种装置负责将种子投放到土壤中,种子供给装置则负责提供种子给播种装置,行走装置用于机器的移动,控制系统则实现对整个播种机的自动化控制。
四、设计方案1. 播种装置设计方案为了保证种子投放均匀,可以采用旋转式的种子投放装置。
该装置通过旋转将种子均匀地投放到土壤中,确保种植密度的均匀性。
2. 种子供给装置设计方案为了保证播种机能够连续供给种子,可以采用种子储存仓和输送装置的组合。
种子储存仓用于存放大量的种子,输送装置则负责将种子从储存仓中输送到播种装置。
3. 行走装置设计方案为了确保播种机在田间能够顺利行走,可以采用履带式行走装置。
该装置具有良好的通过性能,能够适应不同地形的要求,从而保证播种机的稳定行走。
4. 控制系统设计方案为了实现播种机的自动化控制,可以采用传感器和控制器的组合。
传感器负责感知播种机的工作状态和环境信息,控制器则根据传感器的反馈信号对播种机进行智能控制。
五、设计实施在设计实施过程中,需要进行相关的模拟和实验验证。
通过模拟和实验,可以对设计方案的可行性和效果进行评估,从而不断优化和改进设计。
玉米机械化精量播种效果试验
机 械 精量 播 种 的 实 际播 量 为 1 g 67I ,较 前者 . k/ 6 1 0 I 节省 种 子 20k / 6 . g 6 7m 。如果按 机 播 面积 67万 h . m (O 10万亩 )种 子价 格 1.0元/ g 算 , 、 0O k计 则机 械精 量 播种 可节 省 2 0万量 播种 的播 量 为每 穴 1 , 无需 人 工 间 粒 且 苗。而精 少 量播 种需 人 ¨ 间苗 , 6 7m 耕地 需 05 1 : 每 6 ! .
第1 2期 总第 18期 9
21 0 0年 1 2月
农 业科技 与装 备
Ag i ut a S inc & Te hi l g a d Eq i m e rc l url ce e c l o y n up o nt
N O. 2 TorlN O.9 1 a 18
D e .2 0 c 01
量 播种 技 术 能够 达 到苗 齐 、 全 、 苗 苗壮 , 约粮 种 , 节 减
进 行 了 2 Q 2型气 吸式 精量 播 种机 与 2 F 2型精少 B一 B一 量播 种 机 的播 种 效果 对 比试验 试 验作 物 为玉 米 . 品 种 为富友 9号 , 培方 式 为清种 。 栽 试验 采用 5点 法 , 每 点取 l 0穴 . 距均 为 3 . c 穴 60 m。2 0 0 9年 9月 2 日, 9 昌 图县 农 机 推 广站 对 平 安 堡 乡和 四合西 泉村 机 械精 量
玉米精量播种机排种监测系统设计
玉米精量播种机排种监测系统设计玉米精量播种机排种监测系统设计随着农业技术的发展,越来越多的农民选择使用玉米精量播种机来播种作物。
这种现代化的播种机具有高效、精准的特点,能够提高种植效率和作物产量。
然而,由于播种机操作的复杂性,农民往往需要付出更多的精力和时间来监测播种情况,以确保种植效果。
为了解决这个问题,我们设计了一种玉米精量播种机排种监测系统,旨在帮助农民实现自动化的排种监测。
玉米精量播种机排种监测系统由若干传感器、数据采集设备、控制模块和用户界面组成。
首先,我们在播种机的排种装置上安装了压力传感器,用于监测播种时排种器的工作压力。
通过实时监测播种器的工作压力,我们可以判断是否存在堵塞、漏种等问题,及时进行调整和修复。
其次,我们在播种机的种植槽中安装了光电传感器,用于检测种子的排放情况。
光电传感器可以感知到种子在种植槽中通过的光线变化,从而判断种子的排放情况。
如果光电传感器检测到排放异常,系统会自动发出警报,并记录异常的位置和时间,方便农民及时处理问题。
此外,我们还在播种机的耕作部分安装了霍尔传感器,用于监测播种机的移动状态。
通过监测霍尔传感器的输出信号,我们可以实时了解播种机的移动速度和位置。
这对于精准播种非常重要,因为播种机的移动速度和位置会影响种子的排放间距和深度。
当播种机的移动速度或位置异常时,系统会发出警报,帮助农民及时调整播种操作。
最后,我们设计了一个用户界面,用于显示和记录播种机的监测数据。
农民可以通过此界面实时查看播种机的工作状态和监测数据,包括工作压力、种子排放情况、播种机的移动速度和位置等。
同时,系统还支持数据的导出和分析,帮助农民总结经验,改进种植技术,提高作物产量。
通过上述设计,玉米精量播种机排种监测系统能够实现自动化的播种监测,为农民提供了便利和准确的种植工具。
农民只需要在播种前简单设置系统参数,然后系统就能自动监测排种过程,并在发现异常时及时发出警报。
这大大减轻了农民的操作负担,提高了种植效率和作物产量。
玉米播种机的设计(毕业论文doc)
玉米播种机的设计(毕业论文doc)目录第一章绪论 (1)1.1课题来源 (1)1.2本课题的项目背景及研究意义 (1)1.2.1国内发展概况 (3)1.2.2 国外发展概况 (4)1.3课题研究的主要内容 (5)1.3.1主要内容 (5)1.3.2技术要求 (5)1.3.3关于题目的具体要求 (5)1.4关键问题及解决思路 (5)1.4.1关键问题 (5)1.4.2解决思路及设计方案 (5)1.5设计方法和技术路线 (7)第二章播种机的结构设计 (9)2.1转动部分的设计 (9)2.1.1行走地轮的设计 (9)2.1.2鸭嘴的选用 (10)2.1.3接种漏斗的设计 (11)2.2内部固定部分的设计 (12)2.2.1固定部分外壳的设计 (12)2.2.2播种机构的工作原理 (13)2.2.3排种轮的设计 (13)2.2.4毛刷轮的设计 (17)2.2.5各零件位置配合的设计 (18)2.2.6固定部分外壳的继续设计 (19)2.2.7排种盘的设计 (19)2.3中心轴承的选择 (23)2.4轴的设计和校核 (23)2.5地轮与轴连接方式的设计 (23)2.6链轮和链条的选用 (24)2.7推杆和连接部分的设计 (25)2.8本章小结 (25)第三章播种监控装置的设计 (24)3.1红外发射接收装置的选用及安装 (27)3.2无线信号收发模块的选用及安装 (29)3.3单片机的选用及安装 (30)3.4蜂鸣器的选用 (30)3.5电路图及程序设计思路 (31)3.6整合 (32)3.7本章小结 (32)总结 (30)致谢 (31)参考文献 (36)第一章绪论1.1课题来源本课题来源于北华大学机械工程学院和桦甸市宏昌机械厂的校企合作项目。
1.2国内外发展概况我国玉米主要种植地区在黑龙江、吉林、辽宁、北京、河北、山东、河南、内蒙古、西北等地。
播种机是农业生产中关键作业环节,必须在较短的播种农时内,根据农业技术要求,将种子播到田地里去,使作物获得良好的发育生长条件。
基于PLC的玉米播种机设计与试验

基于PLC的玉米播种机设计与试验胡元乾(重庆三峡职业学院ꎬ重庆万州㊀404155)摘㊀要:玉米的种植面积和消费量都很大ꎬ在我国国民经济中占有重要地位ꎮ为满足生产的需求ꎬ我国开发出了多种类型的玉米播种机ꎬ但在智能监测和控制方面仍存在一些问题ꎮ可编程序控制器(PLC)的操作简单ꎬ可靠性和性价比高ꎬ在机械自动控制中具有明显的优势ꎮ为此ꎬ以PLC为核心ꎬ利用监测模块采集播种机工作状态ꎬ分析生成指令后发送给控制模块实现对播种机的精确控制ꎮ试验表明:播种机的实际播种深度和株间距与设定值的差异都很小ꎬ表现出较高的作业精度ꎻ播种机对种箱排空和导种管堵塞都能及时启动报警ꎬ没有出现误报的情况ꎬ具有较高的智能化水平ꎮ关键词:玉米播种机ꎻPLCꎻ监测ꎻ控制中图分类号:S223.2+5㊀㊀㊀㊀㊀㊀㊀文献标识码:A文章编号:1003-188X(2019)07-0230-030㊀引言玉米的净光合速率比小麦和水稻高出2~3倍ꎬ因此产量相对较高ꎮ玉米的营养物质以淀粉㊁蛋白质和脂肪为主ꎬ还含有人类所需的大量氨基酸ꎬ具有很高的应用价值ꎬ成为重要的粮食作物ꎮ此外ꎬ玉米还可以被加工成轻工业品㊁医药和饲料ꎬ是用途广泛的经济作物ꎮ我国玉米历年来的种植面积和消费规模都很庞大ꎬ在国民经济中占有重要的地位[1]ꎮ播种作业的季节性强ꎬ劳动强度大ꎬ是玉米生产过程中一个耗时费力的环节ꎮ播种质量对玉米出苗率和整齐度有较大的影响ꎬ从而影响到最终的产量ꎮ传统种植模式中的玉米播种由人工完成ꎬ不仅效率低ꎬ劳动强度大ꎬ播种质量也无法得到保证ꎬ不能满足现代农业的要求ꎮ机械化程度是农业发展水平的体现ꎬ加快推进机械化符合农业现代化的趋势ꎮ玉米机械播种的过程是将种子按照设定的行间距播到田里ꎬ再覆土掩埋ꎬ功能齐全的机械还能完成施肥作业[2]ꎮ玉米播种机可以代替人工快速地完成播种ꎬ作业质量也较高ꎬ还节省用种量ꎬ是玉米生产中不可缺少的农业机械ꎮ为了满足实际生产的需求ꎬ我国开发出了多种类型的玉米播种机ꎬ以适应不同的种植区域和模式ꎮ任文涛等研制了一种带有施水和施肥功能的小型播种机ꎬ可以用于干旱地区的玉米种植[3]ꎮ赵收稿日期:2018-04-16基金项目:重庆市教委科技项目(KJ1730417)作者简介:胡元乾(1972-)ꎬ男ꎬ重庆万州人ꎬ讲师ꎬ(E-mail)yesuxe629@163.comꎮ建托等设计了全膜覆盖的双垄直插播种装置ꎬ并应用在玉米播种机上[4]ꎮ徐良等对粒距的变异系数进行了研究ꎬ为适用于山地丘陵的小型玉米播种机型号选择提供了依据[5]ꎮ赵静等通过优化液压系统的结构ꎬ设计出折叠式的免耕玉米播种机[6]ꎮ这些机械的开发提升了我国玉米生产的技术水平ꎬ是玉米高产稳产的重要保证ꎮ我国玉米播种机已呈现出良好的发展局面ꎬ但在实际应用中仍暴露出一些问题ꎬ主要体现为部分性能没有完全成熟ꎬ对播种作业质量造成了影响ꎮ首先是排种器的容量固定ꎬ一次性容纳的不同玉米品种种子数量各异ꎬ排种的精度无法保证ꎮ其次ꎬ部分型号机械的播种株间距不能调整ꎬ降低了对玉米品种和种植习惯的适应性ꎮ另外ꎬ当田间作业环境较为恶劣时ꎬ玉米播种机会出现种箱排空和导种管堵塞的现象ꎬ若不能及时发现并解决ꎬ则会造成大面积的漏播[7]ꎮ此外ꎬ还会出现地轮打滑而影响播种精度的问题[8]ꎮ为解决上述的问题ꎬ可以在播种机的设计阶段对其机械部件进行优化ꎬ从而获得合理的结构布局ꎮ对于现有的机械ꎬ可以加载智能化的监测和控制系统ꎬ及时发现并排除问题ꎮ目前ꎬ玉米播种机智能监测和控制系统有多种类型ꎬ核心部件包括单片机㊁PLC和传感器等ꎬ推动了玉米播种机性能的提升[9-10]ꎮPLC全称为可编程序控制器ꎬ是一种数字运算的电子操作系统ꎬ采用可编程序存储操作指令ꎬ通过传输数字和模拟信号来控制机械或生产过程ꎮPLC操作简单ꎬ可靠性和性价比高ꎬ在工业生产的机械自动控制中具有明显的优势ꎮPLC被安装在农业机械或设施上ꎬ可以实现对变量施肥㊁穴盘苗移栽及温室生态条件的精确控制[11-13]ꎮPLC也被用来设计玉米播种机的监测和控制系统ꎬ实现了对机械作业质量和行驶方向的精确控制[14]ꎮ为了加深PLC与玉米播种机的整合程度并提高适应能力ꎬ本文利用传感器采集播种机的工作状态ꎬ由PLC分析后生成指令ꎬ对播种机的播种深度和排种精度进行控制ꎬ并对种箱排空和导种管堵塞引起的漏播进行报警ꎮ最后ꎬ通过试验验证PLC的监测和控制效果ꎬ以提高播种机的智能化水平ꎮ1㊀总体设计和组成部分1.1㊀总体设计机械平台是RN-Z02型玉米播种机ꎬ采用传动轴式ꎬ集播种㊁施肥和覆土的功能于一体ꎮ播种机同时播种3行ꎬ行距为45~60cmꎬ株距为16~32cmꎬ最佳播种深度15cmꎮ播种机由1台东方红LX604型拖拉机牵引并提供电源ꎬ拖拉机前轮轮距160cmꎬ后轮轮距200cmꎬ最小离地间隙32cmꎬ额定功率45kWꎬ行进速度2.0~33.5km/hꎬ最大牵引力为22.5kNꎬ可与RN-Z02型玉米播种机配套使用ꎮPLC控制器作为核心ꎬ与播种机的监测模块和控制模块连接ꎬ接收监测模块发来的数据ꎬ分析后形成控制指令发送给控制模块ꎮ监测模块由各型传感器组成ꎬ安装在播种机的运动部件上用于采集播种机作业过程中的状态信息ꎬ并发送给PLC控制器ꎮ控制模块由驱动电机㊁马达和报警装置组成ꎬ安装在控制执行部件上ꎬ接收PLC控制发来的指令后执行对播种机的控制操作ꎮ1.2㊀组成部分PLC控制器选用三菱FX3U型ꎬ内置的计数器可以捕捉10kHz的脉冲信号ꎬ还具有8000点的数据存储单元ꎬ适用电源为12V的直流电ꎮPLC的内部构成主要为中央处理器CPU㊁存储器和编程器ꎮ输入输出接口数量分别为14个和10个ꎬ输入接口将各种信号转化为标准逻辑电平ꎬ输出接口则输出电信号ꎬ如图1所示ꎮ监测模块包括位移传感器㊁霍尔传感器和光电传感器ꎮ位移传感器为深圳信为公司的SDVG17型分体式LVDT传感器ꎬ安装在仿形轮支架上测量随地表上下浮动的位移信号ꎮ霍尔传感器为HAL41F型ꎬ安装在导种轮上监测转动信号ꎬPLC根据转动脉冲信号计算导种轮的实际转速ꎮ光电传感器为基恩士PS-56R型红外对射传感器ꎬ安装在导种管的末端ꎬ检测单粒玉米种子落下时的高平电信号ꎮ图1㊀PLC控制器的结构Fig.1㊀StructureofthePLCcontroller控制模块中用于校正播种深度的部件是驱动电机和四连杆结构ꎬ能够对开沟器的位置进行调节ꎮ马达安装在导种轮上ꎬ利用转动方向调整导种轮的转速ꎬ从而控制播种精度ꎮ报警器与显示屏整合在一起ꎬ安装在牵引拖拉机上ꎬ在种箱排空或导种管堵塞时启动声光报警ꎬ如图2所示ꎮ图2㊀监测和控制系统的组成部分Fig.2㊀Componentsofmonitoringandcontrollingsystem2㊀工作原理播种机的播种深度和株间距在显示屏上设定ꎬ对种箱排空的认定条件是低平电信号的持续时间达到2sꎬ对导种管堵塞的认定条件是高平电信号的持续时间达到2sꎮPLC按照设定的运算方式ꎬ以采集的播种机状态信息为基础进行逻辑判断ꎬ然后形成控制指令发送给执行部件实现对机械的自动控制ꎮ在播种机作业过程中ꎬPLC还会对相关数据信息持续进行汇总和存储ꎮ播种深度即实际的开沟深度ꎬ由位移传感器测量仿形轮随地表上下移动所产生的位移信号ꎬPLC将实际的开沟深度与设定播种深度比较ꎬ确定两者之间的差异ꎻ驱动电机和四连杆结构按照PLC的指令改变开沟器的位置ꎬ校正播种深度ꎮ播种的株间距由导种轮决定ꎬ霍尔传感器检测导种轮转动的脉冲信号ꎬPLC根据转动信号和机械行驶速度计算株间距ꎬ并与设定值比较ꎻ驱动电机按照PLC的指令调整转动方向和速度ꎬ校正导种轮的转速以便维持设定的株间距ꎮ光电传感器产生的低平电信号或高平电信号持续时间达到设定的阈值时ꎬPLC认定出现种箱排空或导种管堵塞的情况ꎬ自动启动声光报警ꎬ提醒操作人员排除故障ꎮ3㊀程序设计PLC采用与电气控制线路图相似的编程语言梯形图ꎬ界面简单直观ꎬ编程和调试的周期较短ꎮ为解决人机交互能力弱的问题ꎬPLC选用MD2041型文本显示模式进行人机对话ꎬ并用于参数的设定和显示ꎮ该文本还可以直接操作内部辅助继电器和数据存储器ꎬ减少了数据交换所需接口的数量ꎮPLC的基本指令有20条ꎬ还可以根据实际需要设置丰富的功能指令ꎬ具有很大的灵活性ꎮPLC启动后先将计数器㊁定时器和辅助继电器等复位ꎬ进行初始化后开始检测ꎬ每次排除故障后也要重新检测ꎮ机械作业的状态信息和控制参数分别存储在不同的存储区域ꎬ都通过相同的文本显示ꎮ开机时的显示页面用于参数设定ꎬ跳转的页面用于实时操作ꎮ大部分时间显示的是播种机正常工作的状态界面ꎬ在启动报警的同时则自动弹出故障显示界面ꎮ4㊀试验结果和分析将安装PLC的玉米播种机在4个玉米试验田中进行试验ꎬ牵引播种机的拖拉机行驶速度为6km/hꎻ设定的播种深度为15cmꎬ株间距为25cmꎻ用于试验的玉米品种为农华101ꎬ每块试验田取4000粒种子进行试验ꎮ播种完成后测量机械的行驶距离ꎬ计算得到实际的株间距ꎮ在每个试验田中随机取10个2m长的播种线段ꎬ测量线段上的播种深度ꎬ计算平均值后与设定值进行比较ꎬ评价播种作业的精度ꎮ另外ꎬ记录每次种箱排空后的警报响应时间ꎬ以及整个试验过程中导种管堵塞的情况和报警次数ꎬ评价对故障的报警响应能力ꎮ试验的结果如表1所示ꎮ机械的播种深度为14.4~16.0cmꎬ与15cm的设定值差距很小ꎮ播种株间距为25.3~26.6cmꎬ都大于25cm的设定值ꎬ但差异较小ꎬ表明播种机具有较高的作业精度ꎮ每次种箱排空时报警器都及时启动ꎬ响应时间为0.6~1.4sꎮ整个试验过程中导种管堵塞出现了6次ꎬ报警器都能及时启动ꎬ没有出现误报的情况ꎮ表1㊀玉米播种机的作业效果Table1㊀Operationeffectofthecornseeder田块编号播种深度/cm株间距/cm种箱排空响应时间/s114.425.80.8215.326.51.4316.026.60.6415.725.31.15㊀结论为加深PLC与玉米播种机的整合程度并提高适应能力ꎬ以PLC为核心ꎬ利用监测模块采集播种机工作状态ꎬ分析生成指令后发送给控制模块实现对播种机的精确控制ꎮ试验表明:播种机的播种深度为14.4~16.0cmꎬ株间距为25.3~26.6cmꎬ与设定值的差异都很小ꎬ表现出较高的作业精度ꎻ每次出现种箱排空和导种管堵塞时报警器都能及时启动ꎬ没有出现误报的情况ꎬ具有较高的智能化水平ꎮ参考文献:[1]㊀李少昆ꎬ王崇桃.我国玉米产量变化及增产因素分析[J].玉米科学ꎬ2008ꎬ16(4):26-30.[2]㊀林兴旺.论我国普通玉米播种机的实用性改进[J].科技资讯ꎬ2013(22):156.[3]㊀任文涛ꎬ黄毅ꎬ杨懿ꎬ等.玉米精量施水播种机的研制[J].沈阳农业大学学报ꎬ2005ꎬ36(1):72-75. [4]㊀赵建托ꎬ赵武云ꎬ任颜华ꎬ等.玉米全膜覆盖双垄沟播机直插式播种装置设计与仿真[J].农业机械学报ꎬ2010ꎬ41(10):40-43.[5]㊀徐良ꎬ肖洁ꎬ张佩ꎬ等.山地小型玉米播种机粒距变异系数的试验分析[J].农产品加工ꎬ2015(1):75-77. [6]㊀赵静ꎬ许庆斌ꎬ鲁力群ꎬ等.折叠式免耕玉米播种机液压系统设计[J].农机化研究ꎬ2016ꎬ38(1):123-125. [7]㊀戈天剑ꎬ赵斌ꎬ衣淑娟ꎬ等.气吸式玉米播种机排种监测系统研究[J].农机化研究ꎬ2017ꎬ39(8):82-85. [8]㊀彭丽芳ꎬ杨自栋.基于PLC的玉米播种机监测系统设计[J].农机化研究ꎬ2013ꎬ35(6):170-173. [9]㊀周利明ꎬ王书茂ꎬ张小超ꎬ等.基于电容信号的玉米播种机排种性能监测系统[J].农业工程学报ꎬ2012ꎬ28(13):16-21.(下转第241页)2019年7月㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀农机化研究㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第7期dryingrateofcoprinuscomatusandthequalityofdriedproductsweresignificantlyaffectedbyeachfactor(P<0.05).Thetemperatureofhotairwas55ħꎬtherateofhotair1.35m/sandtheslicethickness4mmꎬweretheoptimizedpa ̄rametersofhot-airdryingforcoprinuscomatuswiththebestdryingeffect.Anddyingrate(Y1)was0.301g/minꎬtherehydrationratioofdriedproduct(Y2)3.61ꎬthecolordifference(Y3)21.95ꎬtherelativeerrorofpredictionofmodelislessthan5%.Comprehensiveoptimizationofcoprinuscomatusdryingprocessparameterstakebothdryingrateanddryproductqualityintoaccount.Underthedryingconditionsꎬnotonlythedriedproductofcoprinuscomatushasgoodquali ̄tyꎬbutalsothedryingprocesshaveahighdryingrateandshortdryingtime.TheresearchcanprovideareferencefortheindustrialproductionofCoprinuscomatushot-airdrying.Keywords:hot-airdryingꎻcomprehensivescoremethodꎻresponsesurfaceanalysisꎻtheoptimalprocessparametersꎻcoprinuscomatus(上接第232页)[10]㊀刘坤ꎬ衣淑娟ꎬ赵斌ꎬ等.玉米播种机排种监测的试验研究与设计[J].农机化研究ꎬ2015ꎬ37(12):30-32. [11]㊀邵利敏ꎬ王秀ꎬ牛晓颖ꎬ等.基于PLC的变量施肥控制系统设计与试验[J].农业机械学报ꎬ2007(11):84-87. [12]㊀田素博ꎬ邱立春ꎬ张诗.基于PLC的穴盘苗移栽机械手控制系统设计[J].沈阳农业大学学报ꎬ2007(1):122-124.[13]㊀付焕森ꎬ赵振江.基于PLC和组态技术现代农业温室控制系统设计[J].农机化研究ꎬ2013ꎬ35(12):185-188. [14]㊀史增芳ꎬ姜岩蕾.基于PLC监测系统和远程控制的玉米播种机设计[J].农机化研究ꎬ2016ꎬ38(9):126-130.AbstractID:1003-188X(2019)07-0230-EADesignandExperimentofCornSeederBasedonPLCHuYuanqian(ChongqingThreeGorgesVocationalCollegeꎬChongqing404155ꎬChina)Abstract:Theplantingareaandconsumptionofcornareverylargeꎬwhichoccupiesanimportantpositioninournationaleconomy.InordertomeettheneedsofproductionꎬChinahasdevelopedmanytypesofcornplantersꎬbuttherearestillsomeproblemsinintelligentmonitoringandcontrol.Theprogrammablelogiccontroller(PLC)issimpleinoperationꎬhighinreliabilityandcost-effectiveꎬandhasobviousadvantagesinautomaticmechanicalcontrol.ThispapertakesthePLCasthecoreꎬusesthemonitoringmoduletocollecttheworkingstatusoftheseederꎬanalyzesthegeneratedinstruc ̄tionsandsendsittothecontrolmoduletoachieveprecisecontroloftheseeder.Inthetestꎬtheactualsowingdepthandthespacingbetweentheplantspacingandthesetvalueoftheplanterwereverysmallꎬshowinghighworkaccuracy.Theseedercanpromptlyactivatethealarmfortheemptyingoftheseedboxandtheblockingoftheseedingtubeꎬandthereisnocaseoffalsealarmsꎬwhichhasahighlevelofintelligence.Keywords:cornplanterꎻPLCꎻmonitoringꎻcontrol2019年7月㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀农机化研究㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第7期。
机械毕业设计(论文)-玉米播种机的设计(全套图纸)
玉米播种机的设计学生姓名学 号 **********所属学院 机械电气化工程学院专 业 农业机械化及其自动化班 级 16-2指导老师日 期 2016.05塔里木大学机械电气化工程学院制16 届毕业设计前言农作技术与农机是农业生产中必不可少,又相互作用,前者是后者产生的前提并依靠后者来完成;后者为前者的实现而存在并能促进前者的发展。
耕作播种一体耕作技术是农机和农业结合的改革,现在全世界使用开展示与推广。
现实表明,耕作具有增加土壤肥力、保墒、增加农民收入和降低作业成本等是获得良好的成果。
现在,大力推广和使用耕作技术的核心是各种先进的播种机。
因为耕作拥有着他不可替代的作用,提出了更高的要求用以针对北方旱地的农业播种,为此,研发播种效果好、节水成果明显、灭草彻底等共同作业的农机拥有很重要的意义。
首先,比较成熟的播种机技术的发展,使得秸秆不缠绕开沟器等工作部件,杂草等对机具不拥堵,为耕作提供了较为可靠的实现保障。
全套图纸,加153893706其次,覆盖于地面的小麦残茬和玉米秸秆等,可以使地表土壤的有机质增多、地力加强,同时可以省时省工,有较为明显增产效果。
本文设计的玉米播种机集耕作、施肥、播种等一体化作业。
其中行距可以调、株距等亦可调,对于施肥量的也是可调的,不仅能实现免耕播种一些性能,还能实现精量播种。
本课题设计的主要内容是玉米播种机的设计。
主要通过对原始数据的分析、方案的论证比较与选择,完成了免耕播种机的总体设计,倾斜圆盘式排种器的设计,破茬装置的设计,施肥装置的设计及整体机架的设计等内容。
在此基础上对玉米播种机的结构尺寸、驱动转轴的结构尺寸等进行了详细的计算和说明,并且对轴承以及轴承盒的型号作了选择。
使本方案有了初步的设计应用价值。
关键词:播种机;排种器;精量播种;玉米;耕作目录1绪论 (1)1.1课题研究的目的与意义 (1)1.2国内外发展状况 (1)1.3对课题的任务要求及目标的分析 (2)1.4本课题需要重点研究的关键的问题及解决的思路 (2)1.5完成本课题需要的工作条件及解决的办法 (3)1.6工作条件及解决方法 (3)2玉米播种机总体设计 (3)2.1播种机整机设计原则 (3)2.2免耕播种机总体结构 (3)2.3播种机工作特点 (4)3玉米播种机排种器的设计 (4)3.1倾斜圆盘式排种器 (4)3.2排种盘外形的确定 (5)3.3排种盘直径的确定 (6)3.4排种盘倾角的确定 (6)3.5型孔结构及尺寸确定 (6)3.6排种盘外侧边缘厚度的确定 (8)3.7孔间距的确定 (8)4玉米播种机破茬装置的设计 (9)4.1玉米播种机破茬装置的设计运动原理 (9)4.2传动装置与工作装置 (9)5玉米播种机开沟器的设计 (10)5.1设计原理 (10)5.2设计参数 (10)6排肥器的设计 (10)6.1 排肥器的结构及工作原理 (10)6.2排肥器主要技术参数的确定....................................................................... 错误!未定义书签。
玉米机械精量播种技术

玉米机械精量播种技术作者:王文松来源:《农民致富之友》2012年第24期玉米机械精量播种体系的制定要以实现选用优良种子,创造良好的种床,并赋予其最佳的水、肥、温、气、光照以及预防病虫害等出苗生长条件,按精确粒数、间距和播深将种子播入种沟或种穴,使播入土壤的种子行距、株距满足农艺要求,覆土深度一致,达到底肥深施、单粒下种的一种农机化实用技术。
使玉米增产、高产、抗病力增强。
精选种子:选用手续完备、种性优、适合当地自然条件的高产、优质品种。
精量播种的玉米每穴一粒种子,要求100%出苗,种子纯度要求达到96%以上,发芽势强,发芽率在95%以上,种子净度在99%以上,物理性状好,籽粒饱满,整齐一致,富有光泽,无破损。
所用玉米品种要经过审定,必须具备5项基本原则:首先应根据生育期选用良种,这个品种的生育期在我县环境条件中是相对稳定的;第二,根据丰产性能选用良种,应根据当地近年实验记录选择平均产量最高的品种;第三、根据抗逆性选用良种,选择生育期内品种抗主要病虫害、抗低温冷害、抗旱性、抗涝性、抗风雹、抗倒伏性等能力强的品种。
第五,根据栽培目的选用良种,应根据产业化发展和市场的需求来选用品种。
种子处理:①晒种,经过阳光晒过的种子,播种后吸水快,发芽早,出苗整齐,出苗率高,幼苗粗壮。
②浸种和拌种,清水浸种主要是供给水分,促进发芽。
化学药剂浸种主要是有磷酸二氢钾和微量元素,但是浸种的浓度太高或浸种时间太长,种子容易中毒受害,降低发芽率。
③种子包衣就是给种子裹上一层药剂。
包衣的种子播种后具有抗病、抗虫以及促进生根发芽的能力,要针对当地病虫害对症下药,用25%粉锈宁可湿性粉剂,按种子重量的0.4%拌种,可防治玉米丝黑穗病。
用50%辛硫磷乳油,按种子重量的0.1%拌种或用50%甲胺磷乳油按种子重量的0.5%拌种,防止地下虫。
精心备墒:土壤墒情是影响种子出苗质量的关键,墒情好,土地平整,播种深浅容易一致,出苗整齐均匀。
播前备墒的一个重要环节就是土壤水分的调整。
精量播种机械化技术

精量播种机械化技术一、什么是精量播种机械化技术精量播种机械化技术是选用精良种子,创造良好种床,使播入土壤的种子行距、株距、播深满足农艺要求,覆土深度一致,达到底肥深施、单粒下种的一种农机化实用技术。
二、为什么要搞精量播种机械化精量播种与传统人工木犁播种相比,一是播种质量好,能够达到苗齐苗壮的效果,二是能实现节本增效。
三、精量播种机械化技术的增产机理1、传统播种是通过大于植株合理密度数值的播种量下种,下种量一般在每穴2—4粒以上,然后进行间苗定株。
间苗是一种去小留大、去弱留强的作业工序,需要在幼苗长到4—5片叶子时才能进行。
由于常规播种密度大,易出现2棵苗、多棵苗挤在一起,地下根系也相互交织在一起的现象,间苗时去了弱的就伤了强的。
受伤就需要恢复,被伤害的玉米苗长在地里,伤轻则影响生长速度,伤重者,若又遇干旱,壮苗就会变成弱株,甚至死亡缺苗;精量播种是用精量播种机一次播成的,可以不间苗或很少间苗,不会对作物苗株造成伤害。
2、用精量播种机播种玉米,其株距合格率可达到85%以上,播种深度(覆土厚度)合格率能达到95%以上,有利于出苗整齐一致;这点是传统播种,人工踩格子点籽而无法相比的。
3、种子精量播种入土后吸取营养成分趋于均衡,减少了传统播种苗牙发育时相互争水争肥的现象。
因此,精播的作物出苗整齐、分布均匀,强苗欺弱苗的现象不会发生,每一个单株都能在相似的环境中生长发育,植株之间壮苗弱苗差异不突出,单体植株的自身生产能力基本施展了出来,进而使群体生产率达到较高的水平。
四、精量播种的农艺要求1、土壤温度适当。
一般要求8至12摄氏度。
2、土壤水分适当。
一般要求0—10cm的上表层土含水量在10—22%。
否则可深掏或浅盖。
3、土壤容重适当。
也就是说,土壤要有良好的通气性和供养性能。
五、精量播种对种子的要求精选种子。
选种是去掉伤、坏或不发芽的种子以及一切杂质。
保证:1、净度不低于98%。
2、纯度不低于98%。
3、发芽率不低于95%。
播种机的类型和构造实验

种子箱
合成种子与空气旳混合物, 沿垂直气送增压管路向上
输送,经褶皱式扩压管增
排种定量器 压进入气流分子流均等旳分为若干细
种子流,沿多种子输送管
输送至开沟器,实现气流
统一输送旳一器多行排种。
离心风机
④锥盘式排种器
工作原理:种子在锥面型孔 盘旳旋转带动下,靠重力和 离心力作用沿斜面下滑。充 斥圆周旳平面环带,一部分 进入型孔随圆盘转动,多出 旳种子被刮种器推下,沿输 种管排出。
磨盘与种子筒底座之间留有一定间隙,磨盘回转时,在离心力及磨纹 推力作用下,使种子由中心向外移动,从种子筒底座上旳排种口处强制排 种。多出种子在磨盘边沿处按螺旋线方向上升,再经过磨盘上旳喂入口进 入排种间隙。
磨盘式排种器构造示意图 1.种子筒 2.立轴 3.磨纹盘 4.排种孔盘 5.排种器底座
棘轮式排种器:构造及工作原理与外槽轮式排种器基本一 致,利用钉轮旳转动将种子排出 。
1.棘轮 2.种子箱 3.插板 4.排种舌
(3)气吸式排种器构造及工作原理
视频
工作原理:它由吸种盘、搅 拌轮、吸气管、吸气室和风 机等构成。吸气室经过吸气 管道与风机相连。当风机吸 气时,在吸种盘旳两面便形 成压力差,吸种盘上旳吸种 孔便成为气流通道。种子受 吸力旳作用被吸附在吸种孔 处,吸种盘转动,带有吸附 种子旳吸种孔在经过刮种器 时,多出旳种子被刮去,并 确保吸种孔吸住一粒种子。 当带有种子旳吸种孔转到吸 气室以外之后,种子失去了 吸附力,靠自重经输种管落 入种沟内。
(4)观察滑刀式开沟器旳构造 滑刀式开沟器
芯铧式开沟器
返回目录
(5)观察星轮式排肥器旳构造﹑工作原理及排肥量调整措施。
(6)观察圆盘式﹑锄铲式开沟器旳构造﹑起落机构及其 深浅调整机构旳构造及播深调整措施。
玉米免耕精量播种技术与机具试验研究

玉米免耕精量播种技术与机具试验研究作者:张立军康云友来源:《山东农机化》 2017年第4期最近,省农机技术推广站结合山东省农机装备研发创新计划“玉米免耕精量播种技术与机具验证”项目的实施,在全省选择两个农机合作社分别对勺轮式、指夹式和气吸式三种不同结构型式的玉米免耕精量播种机进行了区域性应用验证示范,依据试验数据,对三种机具的先进性(含经济型)、适用性和安全性(含可靠性)进行了科学合理地评价,为大面积推广应用提供了技术支撑。
一、试验基本情况玉米免耕精量播种机验证示范项目主要是对2BYF-4轮式、2BMYFS-4指夹式、2BMQYF-4/4气吸式等不同结构型式的玉米免耕精量播种机,在兖州、邹平两个地区进行区域性应用验证示范,重点验证机具的先进性、适用性和安全性。
1.试验验证时间、地点、规模(1)时间地点:6月6日至15日,邹平县孙镇全泉农机合作社试验田、兖州区德信农机专业合作社试验田。
(2)机具:2BYF-4勺轮式、2BMYFS-4指夹式和2BMQYF-4/4气吸式玉米免耕精量播种机(两个试验点三种机具各1台)。
(3)面积:邹平试验点性能检测试验作业面积360亩,生产考核作业面积1520亩;兖州试验点性能检测试验作业面积420亩,生产考核作业面积1560亩。
2.试验前准备项目组技术人员在试验前重点在地块、种子、化肥、人员培训等方面进行了充分的准备。
(1)地块准备:选择合作社成方连片的田块作为试验用地。
两个试验点均地势平坦,无障碍物,秸秆覆盖量等应符合试验要求。
邹平试验地块实际长度260米、面积360亩,生产考核作业面积1520亩。
兖州试验地块实际长度300米、面积420亩,生产考核作业面积1560亩。
满足试验项目要求。
试验前调查了试验地状况及环境条件,调查测定的内容主要有试验地地势及坡度、地形、面积、前茬作物、耕作方式、土壤类型、土壤坚实度、土壤含水率、植被覆盖量、干土层厚度、环境温度与湿度等,有关指标均符合试验要求。
玉米精量播种智能控制系统研制
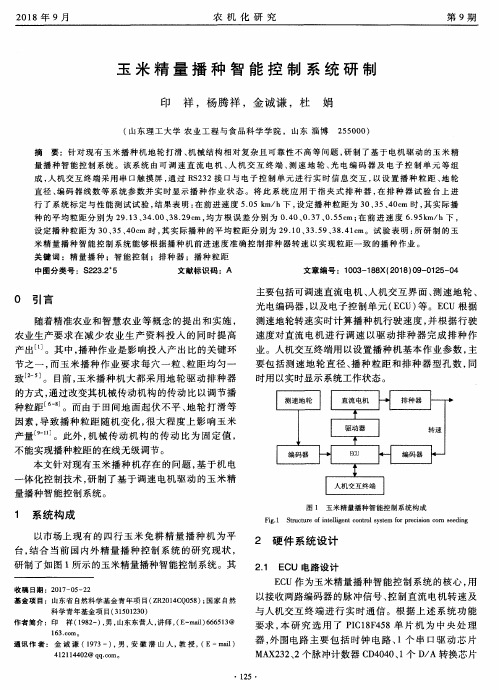
0 引 言
随着精准农业和智 慧农业 等概念 的提 出和实施 , 农业生产要求 在减少农业 生产 资料投入 的 同时提高 产 出r 。其 中 ,播 种作 业 是 影 响投 入 产 出 比的关 键 环 节之 一 ,而玉米播种 作业要求每 穴一粒 、粒距均匀 一 致 ‘2 ]。 目前 ,玉米播种机大都采用地 轮驱动排种 器 的方式 ,通过改变其机械传动机构 的传动 比以调节 播 种 粒 距 J。而 由 于 田间地 面起 伏 不 平 、地 轮 打 滑 等 因素 ,导 致 播 种 粒 距 随 机 变 化 ,很 大 程 度 上 影 响玉 米 产 量 。此外 ,机 械 传 动 机 构 的传 动 比 为 固定 值 , 不 能 实 现播 种 粒距 的在 线无 级 调 节 。
米 精 量 播 种智 能 控 制 系 统 能够 根 据 播 种机 前 进 速 度 准确 控 制 排 种 器 转速 以实 现 粒 距一 致 的播 种 作业 。
关 键 词 :精 量 播 种 ;智 能控 制 ;排 种器 ;播 种 粒 距
中图分 类号 :¥223.2 5
文献标识码 :A
文章编 号 :1003—188X(2018)09一o125—04
量 播 种 智 能 控制 系统 。该 系统 由 可 调 速 直 流 电 机 、人 机 交 互 终 端 、测 速 地 轮 、光 电编 码 器 及 电子 控 制 单 元 等组
成 ,人 机 交 互 终 端 采用 串 口触 摸屏 ,通 过 RS232接 口与 电子 控 制 单 元 进 行 实 时信 息 交 互 ,以设 置 播 种 粒 距 、地 轮
直 径 、编 码 器 线数 等 系 统 参数 并 实 时 显 示播 种 作 业 状 态 。将 此 系 统 应 用 于 指 夹 式 排 种 器 ,在 排 种 器 试 验 台上 进
玉米播种机排种监测与控制系统的设计和研究
3.2.1总程序结构 (29)3.2.2播种机排种监测部分 (29)3.2.3声光报警部分 (30)3.2.4显示部分 (31)3.2.5控制部分 (31)3.2.5按键软件去抖处理 (31)第四章测试与分析 (32)4.1测试实验 (32)4.2试验方法 (32)4.3试验过程 (33)4.4试验结果 (33)第五章总结与展望 (36)5.1总结 (36)5.2展望 (36)参考文献 (37)致谢 (41)作者简介 (42)攻读硕士学位期间发表的学术论文目录 (43)第一章绪论1.1 研究背景在世界上,玉米作为人们粮食的主要来源之一,同时也是畜牧业常用的饲料之一,其具有非常广泛的应用价值。
其中,全球玉米种植面积最大的大陆是北美洲。
种植第二的是拉丁美洲。
种植第三的是亚洲和非洲[1]。
现在全世界玉米种植面积总共有21亿亩,超过4.8亿吨的总产量[2]。
其中,玉米产量最大的国家是美国。
产量第二的是中国。
巴西和墨西哥的产量第三。
从全世界粮食的总产量排名来看,玉米仅次于小麦和水稻,位居世界第三位[3][4]。
玉米是主要的农业作物之一,玉米的种植的耕种面积大,分布范围广泛。
玉米的种植分布存在着南北地区差异大的情况。
玉米的种植区域中,西南、华北和东北是相对集中的种植区域,从种植分布地图上来看玉米种植的情况,分布面积是呈一条自东北到西南的斜长形。
玉米的总产量和总耕种面在我国粮食生产中居首位[5]。
从改革开放后,国家实行的家庭联产承包极大的刺激的农业生产。
这一举动提高了农民进行农业生产的积极性。
各省的玉米播种面积每年都在大幅度的增加,玉米的总产量也不断增加[6]。
在往年《中国统计年鉴》公布的统计数据可以看出,自改革开放这么多年来,玉米的生产在种植面积、每亩单产和各个总产量上都是大幅提高了。
在1990年前,我国玉米种植面积基本稳定在30000万亩,从1990年之后,逐渐发展到3.2亿至3.6亿亩之间。
玉米的种植面积在5年前达到了最高峰,其高达44000万亩,约占全球玉米总播种面积的五分之一。
玉米高质量机械化精量播种技术步骤
玉米高质量机械化精量播种技术步骤玉米是我国重要的粮食作物之一,机械化精量播种技术的应用能够提高玉米的产量和质量。
本文将介绍玉米高质量机械化精量播种技术的步骤。
一、土壤准备在播种前,首先需要进行土壤准备工作。
这包括翻耕、平整土壤、除草、施肥等。
翻耕可以改善土壤结构和通气性,平整土壤能够提供良好的播种条件,除草可以减少杂草对玉米生长的竞争,施肥则能够为玉米提供充足的养分。
二、选择适宜的品种在进行机械化精量播种前,需要选择适宜的玉米品种。
根据当地的气候、土壤条件和市场需求等因素,选择具有良好适应性和高产性的玉米品种。
同时,还要考虑抗病虫害、耐逆性等因素,以确保玉米的产量和质量。
三、选择适宜的播种机具机械化精量播种需要使用适宜的播种机具。
常见的播种机具有精量播种机、插秧机等。
根据不同的机具特点和播种要求,选择合适的机具进行播种。
同时,要保证播种机具的质量和性能稳定,以确保播种效果。
四、确定适宜的播种密度播种密度是影响玉米产量和质量的重要因素之一。
合理的播种密度能够充分利用土壤和光能资源,提高玉米的光合作用效率和产量。
根据玉米品种、土壤肥力和气候条件等因素,确定适宜的播种密度。
一般来说,夏玉米的播种密度为6-8万株/公顷,秋玉米的播种密度为5-7万株/公顷。
五、调整播种深度和行距播种深度和行距也是影响玉米产量和质量的重要因素。
合理的播种深度能够保证种子充分吸收水分和养分,提高发芽率和成活率。
一般来说,播种深度为3-5厘米较为适宜。
行距的选择要根据玉米品种和机械设备的要求来确定,一般为60-75厘米。
六、保证播种质量在进行机械化精量播种时,需要保证播种质量。
首先要选用健壮、无病虫害的种子,确保种子的发芽率和纯度。
其次要保证播种机具的正常运行和调试,确保播种深度和行距的准确性。
此外,还要注意播种速度的控制,避免过快或过慢导致播种不均匀。
七、及时进行田间管理机械化精量播种后,还需要进行及时的田间管理工作。
包括及时除草、追肥、病虫害防治等。
玉米播种机及设计
玉米播种机的设计作者:e所在单位:(e)指导教师:e[摘要]本设计是根据国内外玉米播种的发展趋势,通用性和适应性不断提高以及本着结构简单操作灵活的原则,而设计的一种能同时完成播种施肥工作的小型多功能精密播种机。
本设计解决了以下三个问题,一:在手推式和牵引力式两个方案中最终选择了牵引力式。
二;经过多次对比,结合我国国情,选择了外排槽轮式排种器。
三;动力传动方案的选择,由于单向传动会导致播种机失衡,前进不平稳,所以最终选择双向传动方案。
该机结构上优点,使之能适应各种田地的播种。
小到1-2分大的田块,大到上百亩的田块,不管是平坝、还是浅丘地区;无论是板结的土质,还是疏松的土质都能适应。
还可以根据用户的不同要求,配置合适的播种器。
通过调节犁铧和和种子储存孔的行距,能够轻松地播种小麦、大麦、高粱、大豆、玉米等旱粮作物。
本例着重对播种机排种器、排肥器、开沟器、覆土器以及镇压轮等结构进行设计选择。
[关键词] 精密播种播种机播种施肥覆土镇压The structural design of the corn plantere(e)Tutor: e[Abstract]T he design is based on the development of trends and seeder,interoperability and adaptability in a constantly improving the structure and operation of flexible simple principles designed to simultaneously accomplish a small planting fertilization work multifunctional sophisticated seeder.This design addresses the following three questions:One:In the hand-push and traction type two scenarios ultimately chose traction type.Two:After several comparison,Combined with China's national conditions,select the efflux slot wheel seeder.Three:Select powertrain solutions,due to the one-way transmission will cause an imbalance planter,ahead is not smooth,so the final choice of two-way transmission scheme.This structural advantages so that they can adapt to a variety of fields planting.applicable to all sizes of land;whether plains or hills;whether hard soil or loose soil.We can select the planting machine according to the different needs of users.By regulating platoon of vehicles and plow can easily sow wheat,barley,sorghum,soybean,corn and other crops.This example focuses on the design seeder platoon of vehicles,fertilization devices,trenching vehicles structure.[Key words] precision seeding; planter; sowing; fertilization目录1.引言: (1)1.1精密播种机的发展现状与趋势 (1)1.2我国精密播种机发展现状 (1)1.3精密播种机的发展前景 (1)1.3.1单粒精密播种机迅速发展 (1)1.3.2播种机的通用性和适应性不断提高 (1)1.3.3精密播种机向高速宽幅发展 (1)1.3.4广泛采用联合作业 (2)1.3.5新技术的应用不断普及 (2)2. 总体方案设计................................................ 错误!未定义书签。
玉米精量播种监测系统的设计与试验

玉米精量播种监测系统的设计与试验杨长江;孟志军;梅鹤波;罗长海;董建军;付卫强【摘要】针对玉米精播机作业时常会发生导种管堵塞、地轮排种轴机械传动系统故障及种箱排空造成的漏播等现象,基于单片机技术设计了一套玉米精量播种监测系统,包括整体结构与排种监测传感器电路,完成了相关参数设置.该系统实现了对玉米精播机的播种量、播种速度、播种面积、地轮转速、排种轴转速、种箱料位及机具升降状态等指标的实时监测和漏播故障诊断功能,支持对精播机作业数据远程实时监控管理功能.试验结果表明:玉米精量播种监测系统单粒测量精度约为98.8%,能够实现作业过程的实时监测及远程监管功能.【期刊名称】《农机化研究》【年(卷),期】2019(041)004【总页数】6页(P80-84,90)【关键词】玉米精播机;监测系统;光电传感器;故障诊断【作者】杨长江;孟志军;梅鹤波;罗长海;董建军;付卫强【作者单位】黑龙江八一农垦大学电气与信息学院,黑龙江大庆 163319;黑龙江八一农垦大学电气与信息学院,黑龙江大庆 163319;北京农业智能装备技术研究中心,北京100097;北京农业智能装备技术研究中心,北京100097;北京农业智能装备技术研究中心,北京100097;北京农业智能装备技术研究中心,北京100097;北京农业智能装备技术研究中心,北京100097【正文语种】中文【中图分类】S223.2+50 引言精播技术以其省种和增产的优点在玉米种植过程中广泛应用。
播种作业过程全封闭是玉米精播机的特点之一,但在农田复杂的作业环境下,很容易出现导种管堵塞、地轮排种轴机械传动系统故障及种箱排空造成的漏播现象,严重影响播种质量[1]。
为避免这些情况发生,需在机车后方专门分配人员对玉米精播机工作状况和作业质量进行监测,以及时发现播种机作业故障。
这样不仅工作量大,工作效率低,且监测结果缺乏实时性和准确性,加之传统播种监控系统只具有本地监测功能,作业数据利用率低[2]。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
链式玉米精量播种机的设计与试验鹿㊀瑶ꎬ吕钊钦ꎬ鹿英哲ꎬ郑文秀ꎬ刘正铎ꎬ史文婷ꎬ程祥勋(山东农业大学机械与电子工程学院ꎬ山东泰安㊀271018)摘㊀要:针对播种过程中出现的投种点高㊁种子与排种器和开沟器碰撞致使种子下落位置随机㊁播种均匀性差的问题ꎬ设计了一种链式玉米精量播种机ꎮ该播种机主要由外槽轮式排种装置㊁链式送种装置㊁传动装置及镇压装置等组成ꎬ窝眼轮式排种器精量取种与勺链式穴播器定点投种联合完成播种作业ꎮ为研究播种机前进速度㊁投种包角及投种高度对投种装置性能的影响ꎬ以播种株距合格率为指标进行了正交试验ꎮ结果表明:投种高度对株距合格率的影响显著ꎬ播种机前进速度对株距合格率有一定影响ꎬ投种包角对株距合格率的影响不显著ꎻ当播种机前进速度为1.5~2m/s㊁投种包角为30ʎ~45ʎ㊁投种高度为25~30mm时ꎬ株距合格率为96.79%~99.67%ꎮ田间试验表明ꎬ该玉米精量播种机的株距合格率大于95%ꎬ单粒率ȡ90℅ꎬ空穴率小于5℅ꎬ满足玉米精量播种的要求ꎮ关键词:玉米ꎻ精量播种机ꎻ勺链式中图分类号:S223.2+5㊀㊀㊀㊀㊀㊀㊀文献标识码:A文章编号:1003-188X(2019)02-0145-050㊀引言玉米精量播种机械化技术是利用精量播种机将玉米种按高产农艺要求的播量㊁行距㊁株距㊁播深精确播入土壤ꎬ达到单粒下种㊁株距均匀㊁底肥深施及覆土深度一致的一种农机化实用新技术[1]ꎮ目前ꎬ我国玉米播种机大多采用外槽轮式排种器或圆盘式排种器ꎬ该类排种器结构较简单ꎬ性能可靠ꎬ在机器工作速度较低时作业效果好ꎻ但是ꎬ由于投种高度(从排种口到种沟沟底距离)较大ꎬ种子在投种过程中会因为与导种管和开沟器的碰撞导致落地位置随机[1]ꎬ降低株距合格率ꎬ影响播种机的播种效果ꎬ而通过零速投种技术可以克服上述现象ꎬ实现玉米的精量播种ꎮ现有的零速投种技术根据其投种方式可分为两大类:①二次投种ꎬ即排种器投出种子后ꎬ通过机械作用对种子沿播种机前进反方向加速ꎬ使种子落地时水平分速度接近于零ꎬ实现零速投种ꎻ②重力投种ꎬ即种子受重力下降ꎬ途经曲形导种装置ꎬ使种子获得与播收稿日期:2017-09-20基金项目:山东省现代农业技术体系创新团队岗位专家项目(SDAIT10-22-10)作者简介:鹿㊀瑶(1993-)ꎬ女ꎬ山东莱芜人ꎬ硕士研究生ꎬ(E-mail)1205264946@qq.comꎮ通讯作者:吕钊钦(1968-)ꎬ男ꎬ山东高密人ꎬ教授ꎬ博士生导师ꎬ(E-mail)lzqsdau2003@126.comꎮ种机前进速度大小相等㊁方向相反的水平分速度ꎬ实现零速投种[2-6]ꎮ为提高播种质量㊁实现玉米等株距精量穴播ꎬ本文研制了一种勺链式玉米精量播种机ꎮ该播种机利用零度投种原理ꎬ创造性地设计了勺链式玉米送种装置ꎬ并结合窝眼轮式排种器ꎬ有效地解决了由于撞击造成的种子下落位置随机及播种均匀性差的问题ꎮ1㊀播种机结构组成及工作原理1.1㊀总体结构链式玉米精量播种机主要由机架㊁悬挂装置㊁排种装置㊁链式投种装置㊁传动装置㊁地轮及镇压轮等组成ꎬ主要技术参数如表1所示ꎬ主要结构如图1所示ꎮ1.2㊀工作原理机具与20kW以上的拖拉机配套使用ꎮ机具前进ꎬ地轮转动ꎬ通过传动链条带动排种辊转动ꎬ排种辊上圆周均匀分布有窝眼ꎻ随着辊子顺时针转动ꎬ玉米种粒充入窝眼内ꎬ与此同时排种辊通过齿轮传动ꎬ带动毛刷逆时针转动ꎬ将多余的种子刷回种箱ꎬ确保1个窝眼只充1粒种子ꎻ排种辊带动种子转至种箱下方落种口时ꎬ种子通过重力作用落入勺链输送装置ꎬ勺链输送装置通过链传动与排种辊传递动力ꎬ并确定准确的传动比ꎬ以一定的株距将种子送入开沟器开出的种沟中ꎬ确保株距相同ꎻ而后由镇压轮进行镇压ꎬ完成玉米精密播种工作ꎮ表1㊀链式玉米精量播种机主要技术参数表Table1㊀Maintechnicalparametersofcornpreciseplanterwithchain外形尺寸/mm(长ˑ宽ˑ高)结构质量/kg播种幅宽/mm播种株距/mm播种行距/mm作业速度/km h-1配套动力/kW1500ˑ1200ˑ1460200100030~40500~5501.55~2.32ȡ201.种箱㊀2.大从动链轮㊀3.轴承座㊀4.轴承㊀5.毛刷㊀6.三点悬挂装置㊀7.固定板㊀8.支撑杆㊀9.弹簧㊀10.地轮摇杆㊀11.地轮12.大主动链㊀13.开沟器㊀14.镇压轮㊀15.镇压仿形弹簧㊀16.防护板㊀17.种勺㊀18.小从动链轮㊀19.小主动链轮㊀20.传动链条㊀21.输送链图1㊀链式玉米精量播种机试验台结构图Fig.1㊀Structurediagramofcornpreciseplanterwithchain2㊀关键部件设计2.1㊀排种装置播种机播种质量好坏取决于排种器的排种质量ꎮ目前ꎬ窝眼轮式精密排种器发展较成熟ꎬ应用广泛ꎬ结构简单ꎬ加工成本低ꎬ性能可靠ꎬ在我国精密播种机上应用广泛[3]ꎬ但缺点是存在种子挤压破坏现象且对不同粒径种子通用性差ꎮ本文设计的排种装置通过毛刷柔性清种ꎬ既保护种子完整又提高了精密播种的质量[3]ꎬ作业效果良好ꎮ该机排种装置主要由窝眼轮式排种器㊁排种器外壳㊁清种毛刷㊁调节螺栓㊁传动齿轮及传动链等部分组成ꎬ如图2所示ꎮ型孔与种子的尺寸是否相匹配很重要ꎬ对单粒精密播种更为重要ꎮ为弥补窝眼轮排种器粒径通用性差的缺点ꎬ本排种器针对不同粒径种子配备不同型孔的窝眼轮ꎮ2.2㊀链式投种装置链式输送装置主要由排种勺㊁方形板㊁输送链㊁链轮和防护外壳组成ꎮ升运链是一条中心距500mm的输送链条ꎬ具体结构如图3所示ꎮ输送链通过链轮呈环形可活动地安装在防护外壳内壁上ꎬ链条上等距离固定有12个10mmˑ10mm完全相同的小方板ꎬ排种勺随升运链一起上下运动ꎮ玉米种从种箱投至种沟可分为两个投种过程ꎮ种箱的种子由进种口进入排种腔内开始排种器的清种过程ꎬ清种后的每一粒种子会跟着排种轮转动至落种口位置落入链式投种装置的投种勺上ꎬ完成第1次投种ꎻ随后投种勺的玉米籽粒ꎬ在链轮的带动下运动至投种器投种口处投出ꎬ落入种沟ꎬ完成第2次投种ꎮ第1次投种为常规排种器排种ꎬ此处重点分析第2次投种过程中玉米籽粒的受力及运动情况ꎮ1.毛刷㊀2.机架㊀3.落种口㊀4.排种轮㊀5.种箱图2㊀排种装置结构简图Fig.2㊀Structureofmeteringdevice1.机架㊀2.主动链轮㊀3.投种勺㊀4.链条㊀5.从动链轮6.落种口㊀7.投种器外壳图3㊀链式投种装置示意图Fig.3㊀TheArrangementofbladeSeats由于升运链传动速度较低ꎬ且链式输送装置落种口距离地面较近ꎬ所以较好地解决了种子与排种器和开沟器碰撞致使种子下落位置随机㊁播种均匀性差的问题ꎮ分析播种机的工作过程可知:若没有种勺的作用ꎬ玉米种会在投种轮的底部开口处以抛物线轨迹投出ꎬ使得种子与土壤产生碰撞ꎬ影响株距均匀性ꎻ如若加上该投种勺ꎬ该投种勺给种子一斜向上支持力ꎬ调整投种角α大小ꎬ令种勺支持力与重力㊁内壁支持力㊁摩擦力及转动惯性力水平分力相抵消ꎮ根据牛顿第二定律可得ꎬ玉米籽粒脱离种勺开始下落时水平速度趋近于0ꎬ从而极大地提高了玉米播种株距的均匀性ꎮ以玉米籽粒重心为原点ꎬ水平向右为x轴正向ꎬ竖直向上为y轴正向ꎬ建立辅助坐标系ꎮ为便于分析ꎬ假设玉米籽粒为理想刚性球体ꎬ投种链轮转速恒定不变[2]ꎬ对受力进行正交分解ꎬ则ðFX=F1ˑcosβ+FN1ˑcosγ+FN2ˑ㊀㊀㊀㊀㊀㊀cosβ+f1ˑcosγ(1)ω=π n/30t=γ/ωF1=mω2Rìîíïïïï(2)对此刻种子进行受力分析如图4所示ꎮ根据牛顿第二定律可得mdvdt=mgsinα-μmgcosα(3)式中㊀ðFX 玉米籽粒在x方向所受合力ꎻ㊀F1 转动惯性力ꎻ㊀FN1 投种勺对玉米籽粒的支持力ꎻ㊀FN2 投种筒内表面对玉米籽粒的支持力ꎻ㊀f1 玉米籽粒与投种筒间摩擦力ꎻ㊀β F1与x轴正向夹角ꎻ㊀γ FN1㊁f1与x轴正向夹角ꎻ㊀μ 种子与内壁的摩擦系数ꎮ图4㊀投种过程玉米籽粒受力图Fig.4㊀Forcediagramofcornkernelsinthrowingprocess图4中:O为投种器转动圆心ꎻx㊁y为以玉米籽粒质心为原点辅助坐标系的横㊁纵轴ꎻω为投种链轮角速度(rad/s)ꎻR为玉米籽粒转动半径(m)ꎻα为投种位置与竖直方向的夹角ꎬ即投种角(ʎ)ꎻF1为转动惯性力(N)ꎻFN1为投种勺对玉米籽粒的支持力(N)ꎻFN2为投种筒内表面对玉米籽粒的支持力(N)ꎻf1为玉米籽粒与投种筒间摩擦力(N)ꎻβ为F1与x轴正向夹角(ʎ)ꎻγ为FN1㊁f1与x轴正向夹角(ʎ)ꎻG为玉米籽粒所受重力(N)ꎻVP为播种机前进速度(m/s)ꎮ通过计算得出ꎬ当30ʎɤαɤ60ʎ时ꎬVX=0ꎬ且得ðFX=0(4)当投种包角小于30ʎ时ꎬ种子停滞在投种内壁上不再下滑ꎬ形成自锁ꎬ要想顺利投种ꎬ只能靠下一个种勺将其刮下ꎬ导致落种时间的延迟ꎻ若投种包角大于60ʎ时ꎬ种子缺乏种勺支撑作用ꎬ从而导致株距的不均匀性ꎮ2.3 其它部件动力传动机构由地轮带动链进行传动ꎮ镇压轮为橡胶轮ꎬ橡胶轮滑移的均值和方差都较小ꎬ其直径2019年2月㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀农机化研究㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第2期为40cmꎬ外缘宽度10.5cmꎬ作用是镇压ꎬ达到压碎土块㊁压紧耕作层及蓄水保墒的目的[9]ꎮ3㊀田间试验及验证3.1㊀试验基本条件试验地点为山东农业大学南校实验基地ꎮ试验地属于一年两熟平原区ꎬ土壤为壤土或粘土ꎻ年平均降水量500mm左右ꎮ土壤质地为壤土ꎬ坚实度247.5ˑ104Paꎻ土壤含水率9.3%(0~5cm)㊁11.7%(5~10cm)[4]ꎮ试验用玉米品种为辽丹16号ꎬ千粒质量283gꎬ种子含水率为11.2%ꎬ播种量为300kg/hm2[3]ꎮ试验旨在通过正交试验验证播种机的可行性及最优试验组合ꎬ使播种机播种质量及效率达到最优ꎮ3.2㊀试验设计通过前期单因素试验观察及理论分析ꎬ影响玉米播种质量的主要因素有播种机前进速度vp㊁投种包角α及投种高度hꎮ为明确上述3个因素对切根作业质量的影响ꎬ本试验以株距合格率H作为衡量投种质量的标准ꎬ开展3因素3水平正交试验ꎬ不计交互作用ꎬ试验因素和水平如表2所示ꎬ正交试验方案如表3所示[11]ꎮ其中ꎬ前进速度为播种机的前进速度ꎬ投种包角为投种口位置与水平方向的夹角ꎬ投种高度为投种口到种沟底面的垂直距离ꎮ表2㊀正交试验因素与水平表Table2㊀Orthogonaltestfactorsandlevels水平号因素A投种包角α/(ʎ)B前进速度vp/km h-1C投种高度h/mm1301.5252452.0353602.5453.3㊀试验指标播种株距合格率是播种株距合格粒数占总播种玉米粒数的百分比ꎬ播种株距合格定义为播种机正常工作时播种相邻两粒玉米种粒距处于30~40cm之间ꎬ则H=N1N0其中ꎬH为株距合格率(%)ꎻN1为播种玉米株距合格数(粒)ꎻN0为播种玉米总数(粒)ꎮ每个因素组合方案进行3次重复试验ꎬ每播种100粒玉米种作为1次试验ꎬ分别测每次试验的株距合格率Hꎬ取平均值ꎮ3.4㊀试验结果与分析运用DPS3.01软件对株距合格率结果进行极差分析ꎬ设定显著性水平0.01ꎬ结果如表3所示ꎮ表3㊀正交试验结果Table3㊀Resultsoforthogonaltest试验序号因素投种包角A前进速度B投种高度C试验指标株距合格率H/%111198.45212299.67313392.36421296.79522389.56623199.63731386.55832198.96933299.61K1290.48281.79297.04K2285.98288.19296.07K3285.12291.60268.47k196.8393.9399.01k295.3396.0698.69k395.0497.2089.49极差R1.793.279.52主次因素C>B>A最优组合C1B3A1㊀㊀Ki为各因素第i水平株距合格率之和ꎬki为各因素第i水平株距合格率均值ꎬR为k的极差值ꎮ通过对田间试验的正交结果分析ꎬ得出了较优参数组合:播种机前进速度2m/sꎬ投种包角45ʎꎬ投种高度35mmꎮ3.5㊀最优化参数田间试验当玉米精量播种机设定为最优3个参数时ꎬ进行田间试验得出其最优试验性能参数ꎬ如表4所示ꎮ表4㊀玉米精量播种机试验性能结果Table4㊀Experimentalperformanceresultsofthecornpreciseplanter测试项目单位性能参数测试项目单位性能参数出苗数株280播种行距cm50~60播种株距cm30播种深度cm5.3播种单粒率%95.8株距合格率%96.1播种合格率%95空穴率%44㊀结论1)研制了一种链式玉米精量播种机ꎬ设计了排种装置及投种装置等关键部件ꎬ通过受力分析设计投种装置投种包角范围ꎬ为优化该播种机提供试验依据ꎮ2)进行了以播种机前进速度㊁投种包角及投种高度为影响因素的正交试验ꎬ通过极差分析得出:各因素影响株距合格率的主次顺序为投种高度㊁播种机前进速度㊁投种包角ꎮ其中ꎬ投种高度对株距合格率的影响显著ꎬ播种机前进速度对株距合格率有一定影响ꎬ投种包角对株距合格率的影响不显著ꎮ3)通过对田间试验的正交结果分析ꎬ得出了较优参数组合:播种机前进速度2m/sꎬ投种包角45ʎꎬ投种高度35mmꎮ田间试验表明:此时的播种株距合格率96.1%ꎮ该玉米精量播种机的单粒率95.8%ꎬ空穴率小于5℅ꎬ符合玉米精量播种的农艺要求ꎮ参考文献:[1]㊀肖宝塔ꎬ魏礼ꎬ褚春年ꎬ等.玉米精量播种机械化技术试验研究[J].农机科技推广ꎬ2015(20):26-31. [2]㊀吕金庆ꎬ杨颖ꎬ尚琴琴ꎬ等.气吸式马铃薯排种器正压吹种零速投种性能优化试验[J].农业工程学报ꎬ2016ꎬ32(20):40-48.[3]㊀鹿瑶ꎬ吕钊钦ꎬ郑文秀ꎬ等.玉米窝眼轮排种器性能影响因素试验研究 基于EDEM[J].农机化研究ꎬ2018ꎬ40(6):155-161.[4]㊀刘俊杰ꎬ杨存志ꎬ杨旭ꎬ等.玉米精量排种器性能分析与对比试验[J].农业科技与装备ꎬ2015(5):44-47ꎬ51. [5]㊀李成华ꎬ夏建满ꎬ何波.倾斜圆盘勺式精密排种器投种过程分析[J].农业机械学报ꎬ2005(3):48-50. [6]㊀于亚军.精量排种器结构优化设计[D].大庆:黑龙江八一农垦大学ꎬ2009.[4]㊀李海建ꎬ李洪文ꎬ李问盈ꎬ等.分体式小麦免耕播种机的设计[J].农机化研究ꎬ2007(11):94-98.[5]㊀孙福辉ꎬ封俊ꎬ宋卫堂ꎬ等.2BDY-12单体仿形压轮式播种机的性能试验研究[J].农业机械学报ꎬ1998ꎬ29(8):31-34.[6]㊀史岩鹏.玉米免耕精量播种机的优化设计[D].杨凌:西北农林科技大学ꎬ2015.[7]㊀王圆明ꎬ宋树民ꎬ庞有伦ꎬ等.单行精量玉米播种施肥机的优化设计[J].中国农机化ꎬ2016ꎬ37(11):15-19. [8]㊀姚宗路ꎬ王晓燕ꎬ李洪文ꎬ等.2BMD-12型小麦对行免耕施肥播种机改进与试验研究[J].干旱地区农业研究ꎬ2005ꎬ23(5):46-51.[9]㊀于昭洋ꎬ胡志超ꎬ杨柯ꎬ等.大蒜联合收获切根试验台设计与试验[J].农业工程学报ꎬ2016ꎬ32(22):77-85. [10]㊀于建群ꎬ马成林ꎬ张格.组合内窝孔精密排种器护种和投种过程分析[J].农业机械学报ꎬ2001(4):28-30. [11]㊀李复辉ꎬ刁培松ꎬ杜瑞成ꎬ等.内嵌勺盘式舵轮免耕施肥播种机的研制与试验[J].农业工程学报ꎬ2013ꎬ29(19):16-23.DesignandExperimentofChainCastingCornPrecisionSeederLuYaoꎬLvZhaoqinꎬLuYingzheꎬZhengWenxiuꎬLiuZhengduoꎬShiWentingꎬChengXiangxun(CollegeofMechanicalandElectronicEngineeringꎬShandongAgriculturalUniversityꎬTai an271018ꎬChina)Abstract:Tosolvingtheproblemofhighseedingpointꎬseedcollisionswithseedmeteringtubeandopeneroccurredinthetraditionalseedingmachinesꎬwhichresultinseeddroppositiontoberandomandpoorseedinguniformityofrowingspacingandseedspacingꎬanewkindofspoon-chaincornprecisionseederwasdesigned.Theseedingmachineismainlycomposedofthenestingwheelseedingdeviceꎬthechaintypefeedingdeviceꎬthetransmissionmechanismꎬthecompres ̄siondeviceandsoon.Itcompletesthesowingjobmainlythroughaccurateseedingofthenestingwheelseedingdeviceandthefixedpointseeddroppingofthechaintypefeedingdevice.Inordertostudytheinfluenceoftheplanter sspeedꎬtheplantingangleandtheplantingheightontheperformanceoftheseedingdeviceꎬtheorthogonaltestwascarriedoutwiththequalifiedrateoftheseeding.Theresultsoforthogonaltestshowthatwhentheseedingspeedisbetween1.5m/sto2m/sꎬtheinjectionangleisbetween30ʎto45ʎꎬandthedroppingheightisbetween25mmto30mmꎬthequalifiedratecanreachto96.79%~99.67%.Thenfieldexperimentresultsindicatedthatthequalifiedindexofseedspacingweremorethan95%ꎬthesinglegrainratecanreachto90℅ꎬuniformityofplantingdepthwere88.5%ꎬandtheholerateislessthan5℅ꎬwhichisconsistentwiththeorthogonaltestresultstomeettherequirementofcornseeding.Keywords:cornꎻprecisionseederꎻchaincasting。