MGPL100-25Z资料下载
非标模型列表
模型001.格力 C-压缩机.zip模型002.GZ70(45)系列隔膜压缩机.zip模型003.Mini USB 测试机.zip模型004.NEWPORT系列隔膜压缩机.zip模型0055.GL100系列隔膜压缩机.zip模型006.20立方单缸系列隔膜压缩机.zip模型C三轴雕刻机.zip模型008.300直缝焊机.zip模型009.E型卡簧装配机.zip模型010.CartD25系列隔膜压缩机.zip模型011.G445- 3% 160 隔膜压缩机.zip模型012.GDS112系列隔膜压缩机.zip模型013.T21100全自动立式圆瓶贴标机.zip模型B全自动组装机.zip模型015.V型皮带磨床.zip模型016.钣金自动翻边机构.zip模型017.半自动打磨机(PROE).zip模型018.测试浸锡机(线圈切脚测试浸脚机).zip 模型019.纯凸轮结构之吹气除尘机.zip模型020.大船隔膜式压缩机.zip模型021.点热熔胶机.zip模型022.电焊机.zip模型023.电机非标组装机.zip模型024.电路板五轴点胶机.zip模型025.发动部件加工机.zip模型026.翻转机构.zip模型027.反电动势检测设备(UG).zip模型028.自动转盘钻孔机.zip模型029.非标贴印机.zip模型030.飞剪机.zip模型031.管芯焊接机(UG).zip模型032.滑板开关端子折弯机.zip模型033.混凝土搅拌机.zip模型034.机器人装配工作站(UG).zip模型035.机器人自动化生产注塑模具(UG).zip模型036.继电器全自动组装机.zip模型037.减震器充气机.zip模型038.胶皮修剪机(PROE).zip模型039.精密自动送料振动盘(震动盘).zip模型040.空气压缩机.zip模型041.空气压缩机2.zip模型042.冷却仪器(冷却塔).zip模型043.立式包装机.zip模型044.铆压热熔机.zip模型045.米思米3D打印机.zip模型046.木板切割机(UG).zip模型047.切钻机.zip模型048.南通清洗机.zip模型049.气动夹具.zip模型050.洗发水瓶盖子组装机.zip模型051.全自动SMT贴标机.zip模型052.全自动电机绕线机.zip模型053.热压机.zip模型055.散热片装胶钉贴胶机.zip模型056.塑胶注塑件热切水口机.zip模型057.塑料热熔接铆合机.zip模型058.条码扫描、检测设备.zip模型059.条码扫描设备.zip模型060.五轴钻床.zip模型061.线路板伺服冲孔机(PROE).zip模型062.橡胶圈自动上料机.zip模型063.泄漏试验机(UG设计).zip模型064.压花机(UG).zip模型065.在线称重剔除系统(防错系统设备).zip模型066.折叠式点胶机.zip模型067.纸币机(UG).zip模型068.转盘式铆接机.zip模型069.转盘式自动钻孔机.zip模型070.转塔组对焊接工装.zip模型071.桌面式三轴点胶机(300行程、量产图纸).zip模型072.自动按摩椅.zip模型073.自动封箱机.zip模型074.自动焊锡机.zip模型075.自动化啤酒灌装机.zip模型076.自动化生产线(UG).zip模型077.自动化吸取移送裝置.zip模型078.自动扩管机.zip模型079.自动喷涂机.zip模型080.自动托辊生产流水线(UG).zip模型081.切纸机.zip模型082.3D打印机.zip模型083.播种机.zip模型084.功能测试系统.zip模型085.PCB测试设备.zip模型086.搬送翻转机构式检查机(CREO 3.0设计).zip 模型087.搬运压力机(冲压与取料)(UG).zip模型088.包装测试机.zip模型089.波珠装配机.zip模型090.玻璃压碎机.zip模型091.拆垛机.zip模型092.厂房设备布置图.zip模型093.大扭力绕线机.zip模型094.大型旋转排水设备(UG).zip模型095.定南坦克.zip模型096.堆垛机三维模型.zip模型097.非标生产线.zip模型098.封箱机.zip模型099.管道焊接卡具.zip模型100.管路柔性焊接夹具.zip模型101.花生包装机.zip模型102.激光焊夹具(点焊夹具).zip模型103.健身器材.zip模型104.精密四轴小车床.zip模型105.精密研磨机.zip模型106.磨床.zip模型107.欠驱动机械手.zip模型108.撬装式过滤器系统(UG设计).zip模型109.轻量化机器人焊钳(UG).zip模型110.全自动切纸机.zip模型111.全自动拆包机.zip模型112.全自动绕线扎线机.zip模型113.全自动压力测试机.zip模型114.热压贴合机.zip模型115.双色3d打印机.zip模型116.小型手推式清雪车.zip模型117.医疗瓶灌装线.zip模型118.营救机器人“阿尔法”.zip模型119.羽毛球.zip模型120.羽毛球拍穿线机.zip模型121.玉米收获机.zip模型122.圆振动筛.zip模型123.真空度测试仪(UG).zip模型124.种植机设计.zip模型125.自动安全空降绳.zip模型126.自动焊锡机.zip模型127.自动化模组(包括收放料机与包装机)UG.zip 模型128.自动化啤酒灌装机.zip模型129.自动化跳绳穿线机.zip模型130.自动化油炸食品机.zip模型131.自动绕线机.zip模型132.自动贴标机.zip模型133.自动涂胶机设备.zip模型134.灯检机.zip模型135.2米链板线.zip模型136.直缝焊机.zip模型B全自动组装设备.zip模型138.杯状料取料、卸料装置.zip模型139.测试机器.zip模型140.纯凸轮结构之吹气除尘机.zip模型141.磁铁自动化组装设备.zip模型142.大型复杂六工位测试机.zip模型143.单喷射式打火机机构箱.zip模型144.电机定子填充机.zip模型145.封口机.zip模型146.高速LED元件摆放机.zip模型147.公交车.zip模型148.花生联合收割机.zip模型149.机器人自动焊接机.zip模型150.继电器组装设备.zip模型151.颗粒饲料压制机.zip模型152.锂电池自动碰焊设备.zip模型153.迷你小型车床.zip模型154.气动剥线机构.zip模型155.清洗机.zip模型156.清洗机(改进型).zip模型157.全自动按钮装配机.zip模型158.全自动跳绳包装机.zip模型159.三维门架.zip模型160.散热片装胶钉贴胶机.zip模型161.市政下水道疏通机器人.zip模型162.数控车床.zip模型163.台钻.zip模型164.甜瓜收获机.zip模型165.凸轮压入裁切机.zip模型166.托盘定心夹紧机构.zip模型167.五轴涂装机.zip模型168.3D打印机.zip模型169.6轴自动车床.zip模型170.包装标贴机.zip模型171.包装机.zip模型172.包装食品组装线机.zip模型173.裁切机.zip模型174.电气箱拼装焊接工装.zip模型175.多工位双转台生产组装线(STEP).zip模型176.航空发动机.zip模型177.激光焊线合成卡双界面卡生产设备(PROE).zip 模型178.检测贴胶包装一体机.zip模型179.履带式拖拉机.zip模型180.螺母自动上料.zip模型181.汽车变速箱总成CL200.37.zip模型182.擎天柱.zip模型183.砂带磨床.zip模型184.台扇.zip模型185.遥控赛车.zip模型186.液压升降台.zip模型187.载送轨道.zip模型188.LED测试设备(UG).zip模型189.牙科铣床(UG).zip模型190.600T精密冲床.zip模型191.吹螺丝批嘴结构.zip模型192.电感器组装焊接点胶一体机.zip模型193.电机轴承抛光组装机器.zip模型194.混凝土搅拌机.zip模型195.家用中央空调主机.zip模型196.热熔钻机床设备.zip模型197.三坐标测量机.zip模型198.小型叉车.zip模型199.自动化钻铣一体机床.zip模型200.式金属剪断机(UG).zip模型201.导弹列车列車.zip模型202.举高消防车.zip模型203.螺母铆接机.zip模型204.螺旋输送机.zip模型205.铆接机UG设计.zip模型206.输送线+机械手.zip模型207.自动涂胶机(UG).zip模型208.激光焊接气动工装夹具(UG).zip模型209.铆柱机.zip模型210.全自动螺丝拧紧设备.zip模型211.手持式自动锁螺丝机(PROE).zip模型212.双头全自动活塞式液体灌装机(UG设计).zip 模型213.武术擂台比赛机器人.zip模型214.型显微镜内部结构(UG).zip模型215.ES165D安川机器人爪手(UG).zip模型216.MTU柴油发动机.zip模型217.船用轴带发电机变流器(UG).zip模型218.封箱机.zip模型219.蜂窝煤机.zip模型220.机械结构模拟太阳系行星运动.zip模型221.空中协助救援机器人.zip模型222.平板搓丝机.zip模型223.平面磨床.zip模型224.全自动核心组件邦定机(带陶瓷加热炉).zip模型225.全自动精密PIN型钻孔机(UG).zip模型226.塑料产品对接焊接设备(UG).zip模型227.纸板、泡沫板等打孔机(UG).zip模型228.打印机(UG).zip模型229.PCB板存板自动送料机.zip模型230.接料带机(UG).zip模型231.VE型分配泵--柴油机燃油泵(PROE).zip模型232.Y电容自动套磁环点胶机 3D模型.zip模型233.搬运压力机(UG).zip模型234.钣金机器人(UG).zip模型235.不锈钢钢管焊机.zip模型236.道依茨涡轮增压器(UG).zip模型237.电梯用面板平面加工专用铣床(UG).zip模型238.断路器(UG).zip模型239.多连杆机械手(UG).zip模型240.放线-分线-喷码-计量长度一体化放线机(UG).zip 模型241.工位拧紧机(UG).zip模型242.骨骼复位外固定器(UG).zip模型243.滚筒洗衣机(PROE设计).zip模型244.机械狮虎兽(UG).zip模型245.激光焊线合成卡双界面银行卡生产设备.zip模型246.胶圈装订机(UG设计).zip模型247.拉丝机.zip模型248.升降工作台(UG).zip模型249.升料机.zip模型250.水冷式电脑主板(PROE).zip模型251.外包装袋热封真空包装机.zip模型252.小型松土机(UG).zip模型253.油缸带动齿条脱螺纹(UG).zip模型254.铸造设备(UG).zip模型255.转盘机(UG).zip模型256.自动超声泼机.zip模型257.搬运机械手.zip模型258.宝马甲克虫 (ProE).zip模型259.触摸屏探针测试机.zip模型260.淡水净化试验机(UG).zip模型261.角磨机模型 (ProE).zip模型262.立式加工中心光机模型.zip模型263.汽车C柱工装夹具(UG).zip模型264.清洗机.zip模型265.四轮移动升降机.zip模型267.条码扫描设备.zip模型268.玩具重卡.zip模型269.线轨数控车床(UG).zip模型270.小型冲床.zip模型271.小型脱粒机(PROE).zip模型272.医药配件组装机.zip模型273.桌面式机箱钣金.zip模型274.自动进料无心磨床.zip模型275.U型缓冲台模型(UG).zip模型276.磁芯分组头 (UG).zip模型278.点胶机设备(UG).zip模型279.高速自动耳机打孔机.zip模型280.光学检测设备.zip模型281.火花塞纸塑包装机(UG).zip模型282.机器人(UG).zip模型283.经典电子设备搬运机构.zip模型284.迷你圆锯机.zip模型285.汽车铰链自动压装机(UG).zip模型286.全自动点胶机(UG设计).zip模型287.手机液晶屏与背光自动组装机(UG).zip 模型288.数控车床自动上料机械手.zip模型289.双锯片切割机(UG).zip模型290.微波炉阳极组装生产线.zip模型291.运货火车车皮(UG).zip模型292.智能笔自动测试机(UG).zip模型293.自动平面磨床(UG).zip模型294.CEDI超纯水系统处理设备(UG).zip模型295.电机泵组.zip模型296.发动机转子矫正镭射机(UG).zip模型297.放线机(UG).zip模型298.自动组装机(UG).zip模型299.管道结构设计(用于船舶)(UG).zip模型300.焊接移动车(UG).zip模型301.红外线干燥贴标机(UG).zip模型302.活塞销装配机(UG).zip模型303.机械式飞马.zip模型304.加勒特复合固定式发动机.zip模型305.减振器焊接工作站.zip模型306.精密震动送料盘.zip模型307.靠墙户外电控柜.zip模型308.立式转盘(UG).zip模型309.螺丝电镀的滚镀机.zip模型310.木片切削机(UG).zip模型311.气门锁夹激光检测机(UG).zip模型312.轻型卡车模型(UG).zip模型313.三厢轿车麦弗逊式独立前悬架(CATA).zip 模型314.生物柴油钻井液生产设备(UG).zip模型315.手动变速器.zip模型316通用车床6140(PROE).zip模型317卧式活塞销装配机(UG).zip模型318研磨机(UG).zip模型319.饮料瓶传送装置(PROE).zip模型320.下盖侧面热熔机.zip模型321.PINKI双涡轮增压发动机+中冷器(PROE).zip 模型322.管子坡口机(PROE).zip模型323.冷水机组(PROE).zip模型324.马鞍数控自动焊机.zip模型325.马自达转子发动机(CATIA).zip模型326.巧克力糖果包装机(UG).zip模型327.注射稀释聚合物系统管道设计(UG).zip 模型328.K20便携式票据打印机(PROE).zip模型329.包装机(PROE).zip模型330.乘骑式插秧机(PROE).zip模型331.检测机(PROE).zip模型332.摩擦试验机(PROE).zip模型333.三轮拖拉机(PROE).zip模型334.四冲程发动机432cc(PROE).zip模型335.陀螺泵(PROE).zip模型336.挖掘机(PROE).zip模型337.蒸汽炉(PROE).zip模型338.自动打磨机(PROE).zip模型买家必读-解压密码模型机器人三维模型大集合.zip模型:通用格式.zip模型买家必读-解压密码\买家必读.doc模型买家必读-解压密码\首页-Baymax 工作室.urlBaymax教育 2982823334.zip。
mgp气缸(SMC带导杆)

!"#$%MGP (ø12ø100)· 体积小、轻巧。
· 耐横向负载能力强。
· 耐扭矩能力强。
· 不回转精度高。
· 导向杆的轴承可选择滑动轴承或球轴承。
· 安装方便。
· 二面接管位置可供选择。
最大横向负载F(N) 最大扭矩T(N •m)扭矩:T(N型号表示方法* 中间行程间隔为1mm(ø12~ø32)或5mm(ø40~ø100); 若需要非标准行程需加垫板于标准 行程气缸内。
** 磁性开关规格及特性可参阅磁性开关系列。
在磁性开关型号后,附 导线长度表示记号:无记号-0.5m ,L -3m ,Z-5m 。
例:Y59A, Y59AL行程/磁性开关型号MGPM , MGPL 共同尺寸表4-NN通孔4-øOA 通孔4-øOB 沉孔深OLPA + 行程XX部详细图C + 行程B + 行程A + 行程12 ~ ø25深深部深深部部深!"=E FXX 部详细图32 ~ ø63MGPM (滑动轴承)尺寸A,DB,EMGPL (球轴承)尺寸A,DB,E4-NN 通孔4-øOA 通孔4-øOB 沉孔深OLC + 行程B + 行程A + 行程PA + 行程深部深部深深部深ø80 ~ ø100MGPM (滑动轴承)MGPL (球轴承)st = 行程MGPM , MGPL 共同尺寸表XX 部详细图4-NN 通孔4-øOA 通孔4-øOB 沉孔深OLPA + 行程C + 行程B + 行程A + 行程深部深部深部深ø6H7深106H710ø6H7深10ø6H7深1057ø6H 7规格缸径(mm)最高使用压力(MPa)最低使用压力(MPa)缓冲*其它规格参见P.1.197。
Best Pneumatics MGP M 32 周期杆长度[mm] 参考标准杆长在页47说明书
![Best Pneumatics MGP M 32 周期杆长度[mm] 参考标准杆长在页47说明书](https://img.taocdn.com/s3/m/7c16adc685868762caaedd3383c4bb4cf7ecb7ef.png)
How to OrderRefer to Standard Strokes on page 47.Compact Guide Cylinder/With End Lock Series MGPø20, ø25, ø32, ø40, ø50, ø63, ø80, ø100For details, refer to p age 47.refer to the table below.*: Solid state auto switches marked with “p ” are produced upon receipt of order.*: Bore sizes 32 to 100 are available for D-P4DW m .*: Bore sizes 25 to 100 are available for D-P3DWA m .*: Lead wire length symbols: 0.5 m·········· N il(Example) M9NW 1 m·········· M (Example) M9NWM 3 m·········· L (Example) M9NWL 5 m·········· Z(Example) M9NWZ*: Since there are other applicable auto switches than listed above, refer to page 66 for details.*: F or details about auto switches with pre-wired connector, refer to the WEB catalog or the Best Pneumatics No. 3. For D-P3DWA m , refer to the WEB catalog .*: Auto switches are shipped together, (but not assembled).*1: W ater resistant type auto switches can be mounted on the above models, but in such case SMC cannot guarantee water resistance.Please consult with SMC regarding water resistant types with the above model numbers.*2: 1 m type lead wire is only applicable to the D-A93.46C o u r t e s y o f C M A /F l o d y n e /H y d r a d y n e ▪ M o t i o n C o n t r o l ▪ H y d r a u l i c ▪ P n e u m a t i c ▪ E l e c t r i c a l ▪ M e c h a n i c a l ▪ (800) 426-5480 ▪ w w w .c m a f h .c o mSymbolRubber bumperSpecificationsStandard StrokesManufacture of Intermediate StrokeLock SpecificationsMade to Order(For details, refer to pages 72 and 89.)*1: 0.1 MPa except the lock unit.*2: M aximum speed with no load. Depending on the operating conditions, the piston speed may not besatisfied. Make a model selection, considering a load according to the graph on pages 16 to 22.Adjust switch positions for operation at both the stroke end and backlash (2 mm) movement positions.Lock position Head end, Rod end Holding force (Max.) N ø20ø25ø32ø40ø50ø63ø80ø1002153305508601340214034505390Backlash 2 mm or less Manual releaseNon-lock type, Lock type*: The minimum stroke for mounting auto switches is 10 stroke or more for two switches, and 5 stroke or more for one switch.*: Intermediate stroke (in 1 mm increments) based on an exclusive body will be available upon request for special.DescriptionSpacer installation type.Dealing with the stroke in 5 mm increments is available by installing spacer with standard stroke cylinder. When a spacer is mounted on the cylinder with an end lock on the rod side, use a special piston rod.Part no.Refer to “How to Order” for the standard model numbers on page 46.Applicable stroke [mm] 5 to 395ExamplePart no.: MGPM50-35-HNA spacer 15 mm in width is installed in a MGPM50-50-HN. C dimension is 119 mm.Theoretical Output*1: The shape is the same as the current product.47Series MGPC o u r t e s y o f C M A /F l o d y n e /H y d r a d y n e ▪ M o t i o n C o n t r o l ▪ H y d r a u l i c ▪ P n e u m a t i c ▪ E l e c t r i c a l ▪ M e c h a n i c a l ▪ (800) 426-5480 ▪ w w w .c m a f h .c o mθModel selection is the same as MGP/standard type.Refer to pages 16 to 23.Model selection Allowable Rotational Torque of Plate.Non-rotating Accuracyof PlateCalculation: (Example) MGPM50-100-HN• B asic Weight + Lock unit additional weight• 5.74 + 0.24 = 5.98 k gFor non-rotating accuracy q without load, usea value no more than the values in the table asa guide.48 CourtesyofCMA/Flodyne/Hydradyne▪MotionControl▪Hydraulic▪Pneumatic▪Electrical▪Mechanical▪(8ø50 or moreø20, ø25: 25 stroke(Rod end lock)ø20 to ø63øø80, ø100ø63 or moreNon-locking type(Head end lock)bore size.*: S ince the seal kit does not include a grease pack, order it separately.Grease pack part no.: GR-S-010 (10 g) Construction/Series MGPM49Series MGPCourtesyofCMA/Flodyne/Hydradyne▪MotionControl▪Hydraulic▪Pneumatic▪Electrical▪Mechanical▪(8)426-548▪www.cmafh.comø63 or moreLock type50C o u r t e s y o f C M A /F l o d y n e /H y d r a d y n e ▪ M o t i o n C o n t r o l ▪ H y d r a u l i c ▪ P n e u m a t i c ▪ E l e c t r i c a l ▪ M e c h aDetailed figure ofsection XXEnd lock mechanism(Manual release lock type)ø25With rod end lockWith head end lockDimensions: ø20, ø25MGPL (Ball bushing),End Lock Mechanism*: For intermediate strokes other than standard strokes, refer to the Manufacture of Intermediate Stroke on page 47.*: Rc, NPT and G ports can be selected. (Refer to page 46.)T-slot dimensions51Series MGPCourtesyofCMA/Flodyne/Hydradyne▪MotionControl▪Hydraulic▪Pneumatic▪Electrical▪Mechanical▪(8)426-548▪www.cmafh.comDetailed figure of section XXEnd lock mechanism(Manual release lock type) With rod end lockWith head end lock*: For intermediate strokes other than standard strokes, refer to the Manufacture of Intermediate Stroke on page 47.*: Rc, NPT and G ports can be selected. (Refer to page 46.)52 CourtesyofCMA/Flodyne/Hydradyne▪MotionControl▪Hydraulic▪Pneumatic▪Electrical▪Mechanical▪(8)426-548▪www.cmDetailed figure of section XXEnd lock mechanism(Manual release lock type) With rod end lockWith head end lock*: For intermediate strokes other than standard strokes, refer to the Manufacture of Intermediate Stroke on page 47.*: Rc, NPT and G ports can be selected. (Refer to page 46.)Dimensions: ø80, ø100MGPL (Ball bushing),End Lock Mechanism53Series MGPCourtesyofCMA/Flodyne/Hydradyne▪MotionControl▪Hydraulic▪Pneumatic▪Electrical▪Mechanical▪(8)426-548▪www.cmafh.comLockReleaseReleasedLockedWith head end lockSeries MGP With End LockSpecific Product PrecautionsBe sure to read this before handling. Refer to the back cover for Safety Instructions.For Actuator and Auto Switch Precautions, refer to Handling Precautions for SMCProducts and the Operation Manual on the SMC website, Use Recommended Air Pressure Circuit.Caution• It is necessary for proper locking and unlocking.Operating PressureCaution1. Supply air pressure of 0.15 MPa or higher to the port on the sidethat has the lock mechanism, as it is necessary for disengagingthe lock.Exhaust Air SpeedCaution1. The lock will engage automatically if the air pressure at the port onthe side that has the lock mechanism becomes 0.05 MPa or less.Be aware that if the piping on the side that has the lock mechanismis narrow and long, or if the speed controller is located far from thecylinder port, the exhaust air speed could become slower, involvinga longer time for the lock to engage. A similar result will ensure ifthe silencer that is installed on the exhaust port of the solenoidvalve becomes clogged.Lock DisengagementWarning1. To disengage the lock, make sure to supply air pressure to theport on the side without a lock mechanism, thus preventing theload from being applied to the lock mechanism. (Refer to therecommended air pressure circuit.) If the lock is disengaged whenthe port on the side that does not contain a lock mechanism is inthe exhausted state and the load is being applied to the lockmechanism, undue force will be applied to the lock mechanism,and it may damage the lock mechanism. Also, it could beextremely dangerous, because the piston rod could movesuddenly.HandlingCaution1. Do not use a 3 position solenoid valve.Avoid using this cylinder in combination with a 3 position solenoidvalve (particularly the closed center metal seal type). If air pressurebecomes sealed inside the port on the side that contains the lockmechanism, the lock will not engage. Even if the lock is engagedat first, the air that leaks from the solenoid valve could enter thecylinder and cause the lock to disengage as time elapses.2. Back pressure is necessary for unlocking.Before starting, make sure that air is supplied to the side that is notequipped with a lock mechanism as shown in the diagram above.Otherwise, the lock may not disengage.(Refer to “Rock Disengagement”.)3. Disengage the lock before installing oradjusting the cylinder.The lock could become damaged if the cylinder is installed with itslock engaged.4. Operate the cylinder at a load ratio of 50% or less.The lock might not disengage or might become damaged if a loadratio of 50% is exceeded.5. Do not synchronize multiple cylinders.Do not operate two or more end lock cylinders synchronized tomove a single workpiece because one of the cylinder locks maynot be able to disengage when required.6. Operate the speed controller under meter-out control.If operated under meter-in control, the lock might not disengage.7. On the side that has a lock, make sure tooperate at the stroke end of the cylinder.The lock might not engage or disengage if the piston of thecylinder has not reached the stroke end.8. Do not use the air cylinder as an air-hydrocylinder. This may result in oil leak.9. The position adjustment of the auto switchshould be performed at two positions; a po-sition determined by the stroke and a posi-tion after the backlash movement (by 2 mm).When a 2-color indication auto switch is adjusted to show green atthe stroke end, the indication may turn red when the cylinderreturns by the backlash. This, however, is not an error.1. Non-locking style manual releaseInsert the bolt, which is provided as anaccessory part, through the rubber cap (it isnot necessary to remove the rubber cap).Screw the bolt into the lock piston and pullthe bolt to disengage the lock. Releasingthe bolt will re-engage the lock.otherwise it may cause malfunction of the locking feature.Manual DisengagementCaution2. Locking style manual releaseTurn 90°counterclockwise while pushing the M/O knob. Lock isreleased when on the cap and OFF mark on the M/O knobcorrespond. (Lock remains released.)When locking isdesired, turn 90°clockwise while fullypushing the M/O knoband correspond onthe cap and ONmark on the M/O knob.Confirm the correctposition by click sound“click”. Otherwise, lockmay not be engaged.54 CourtesyofCMA/Flodyne/Hydradyne▪MotionControl▪Hydraulic▪Pneumatic▪Electrical▪Mechanical▪(8)426-548▪www.cmafh.com。
CY37032VP44-100ACT中文资料

5V, 3.3V, ISR™ High-Performance CPLDsUltra37000 CPLD FamilyFeatures•In-System Reprogrammable™ (ISR™) CMOS CPLDs —JTAG interface for reconfigurability—Design changes do not cause pinout changes—Design changes do not cause timing changes •High density—32 to 512 macrocells—32 to 264 I/O pins—Five dedicated inputs including four clock pins •Simple timing model—No fanout delays—No expander delays—No dedicated vs. I/O pin delays—No additional delay through PIM—No penalty for using full 16 product terms—No delay for steering or sharing product terms •3.3V and 5V versions•PCI-compatible[1]•Programmable bus-hold capabilities on all I/Os •Intelligent product term allocator provides:—0 to 16 product terms to any macrocell—Product term steering on an individual basis—Product term sharing among local macrocells •Flexible clocking—Four synchronous clocks per device—Product term clocking—Clock polarity control per logic block•Consistent package/pinout offering across all densities —Simplifies design migration—Same pinout for 3.3V and 5.0V devices •Packages—44 to 400 leads in PLCC, CLCC, PQFP, TQFP, CQFP, BGA, and Fine-Pitch BGA packages—Lead(Pb)-free packages available General DescriptionThe Ultra37000™ family of CMOS CPLDs provides a range of high-density programmable logic solutions with unparalleled system performance. The Ultra37000 family is designed to bring the flexibility, ease of use, and performance of the 22V10 to high-density CPLDs. The architecture is based on a number of logic blocks that are connected by a Programmable Inter-connect Matrix (PIM). Each logic block features its own product term array, product term allocator, and 16 macrocells. The PIM distributes signals from the logic block outputs and all input pins to the logic block inputs.All of the Ultra37000 devices are electrically erasable and In-System Reprogrammable (ISR), which simplifies both design and manufacturing flows, thereby reducing costs. The ISR feature provides the ability to reconfigure the devices without having design changes cause pinout or timing changes. The Cypress ISR function is implemented through a JTAG-compliant serial interface. Data is shifted in and out through the TDI and TDO pins, respectively. Because of the superior routability and simple timing model of the Ultra37000 devices, ISR allows users to change existing logic designs while simultaneously fixing pinout assignments and maintaining system performance.The entire family features JTAG for ISR and boundary scan, and is compatible with the PCI Local Bus specification, meeting the electrical and timing requirements. The Ultra37000 family features user programmable bus-hold capabilities on all I/Os.Ultra37000 5.0V DevicesThe Ultra37000 devices operate with a 5V supply and can support 5V or 3.3V I/O levels. V CCO connections provide the capability of interfacing to either a 5V or 3.3V bus. By connecting the V CCO pins to 5V the user insures 5V TTL levels on the outputs. If V CCO is connected to 3.3V the output levels meet 3.3V JEDEC standard CMOS levels and are 5V tolerant. These devices require 5V ISR programming.Ultra37000V 3.3V DevicesDevices operating with a 3.3V supply require 3.3V on all V CCO pins, reducing the device’s power consumption. These devices support 3.3V JEDEC standard CMOS output levels, and are 5V-tolerant. These devices allow 3.3V ISR programming.Note:1.Due to the 5V-tolerant nature of 3.3V device I/Os, the I/Os are not clamped to V CC, PCI V IH = 2V.Selection Guide5.0V Selection GuideGeneral InformationDevice Macrocells Dedicated Inputs I/O Pins Speed (t PD)Speed(f MAX) CY37032325326200 CY3706464532/646200 CY37128128564/128 6.5167 CY3719219251207.5154 CY372562565128/160/1927.5154 CY373843845160/19210118 CY375125125160/192/26410118Speed BinsDevice2001671541431251008366 CY37032X X XCY37064X X XCY37128X X XCY37192X X XCY37256 X X XCY37384X XCY37512X X XDevice-Package Offering and I/O CountDevice44-LeadTQFP44-LeadPLCC44-LeadCLCC84-LeadPLCC84-LeadCLCC100-LeadTQFP160-LeadTQFP160-LeadCQFP208-LeadPQFP208-LeadCQFP256-LeadBGA352-LeadBGACY370323737CY370643737376969CY37128696969133CY37192125CY37256133133165197CY37384165197CY37512165165197269 3.3V Selection GuideGeneral InformationDevice Macrocells Dedicated Inputs I/O Pins Speed (t PD)Speed(f MAX) CY37032V325328.5143 CY37064V64532/648.5143 CY37128V128564/80/12810125 CY37192V192512012100 CY37256V2565128/160/19212100 CY37384V3845160/1921583 CY37512V5125160/192/2641583Architecture Overview of Ultra37000 FamilyProgrammable Interconnect MatrixThe PIM consists of a completely global routing matrix for signals from I/O pins and feedbacks from the logic blocks. The PIM provides extremely robust interconnection to avoid fitting and density limitations.The inputs to the PIM consist of all I/O and dedicated input pins and all macrocell feedbacks from within the logic blocks. The number of PIM inputs increases with pin count and the number of logic blocks. The outputs from the PIM are signals routed to the appropriate logic blocks. Each logic block receives 36inputs from the PIM and their complements, allowing for 32-bit operations to be implemented in a single pass through the device. The wide number of inputs to the logic block also improves the routing capacity of the Ultra37000 family.An important feature of the PIM is its simple timing. The propa-gation delay through the PIM is accounted for in the timing specifications for each device. There is no additional delay for traveling through the PIM. In fact, all inputs travel through the PIM. As a result, there are no route-dependent timing param-eters on the Ultra37000 devices. The worst-case PIM delays are incorporated in all appropriate Ultra37000 specifications. Routing signals through the PIM is completely invisible to the user. All routing is accomplished by software—no hand routing is necessary. Warp and third-party development packages automatically route designs for the Ultra37000 family in a matter of minutes. Finally, the rich routing resources of the Ultra37000 family accommodate last minute logic changes while maintaining fixed pin assignments.Logic BlockThe logic block is the basic building block of the Ultra37000architecture. It consists of a product term array, an intelligent product-term allocator, 16 macrocells, and a number of I/O cells. The number of I/O cells varies depending on the device used. Refer to Figure 1 for the block diagram.Product Term ArrayEach logic block features a 72 x 87 programmable product term array. This array accepts 36 inputs from the PIM, which originate from macrocell feedbacks and device pins. Active LOW and active HIGH versions of each of these inputs are generated to create the full 72-input field. The 87 product terms in the array can be created from any of the 72 inputs. Of the 87 product terms, 80 are for general-purpose use for the 16 macrocells in the logic block. Four of the remaining seven product terms in the logic block are output enable (OE)product terms. Each of the OE product terms controls up to eight of the 16 macrocells and is selectable on an individual macrocell basis. In other words, each I/O cell can select between one of two OE product terms to control the output buffer. The first two of these four OE product terms are available to the upper half of the I/O macrocells in a logic block.The other two OE product terms are available to the lower half of the I/O macrocells in a logic block.The next two product terms in each logic block are dedicated asynchronous set and asynchronous reset product terms. The final product term is the product term clock. The set, reset, OE and product term clock have polarity control to realize OR functions in a single pass through the array.Speed BinsDevice 2001671541431251008366CY37032V X X CY37064V XXCY37128V XXCY37192V X X CY37256V XX CY37384V X X CY37512VXXDevice-Package Offering and I/O CountDevice 44-L e a d T Q F P 44-L e a d C L C C 48-L e a d F B G A 84-L e a d C L C C 100-L e a d T Q F P 100-L e a d F B G A 160-L e a d T Q F P 160-L e a d C Q F P 208-L e a d P Q F P 208-L e a d C Q F P 256-L e a d B G A 256-L e a d F B G A 352-L e a d B G A 400-L e a d F B G ACY37032V 3737CY37064V 3737376969CY37128V 696985133CY37192V 125CY37256V 133133165197197CY37384V 165197CY37512V165165197269269Low-Power OptionEach logic block can operate in high-speed mode for critical path performance, or in low-power mode for power conser-vation. The logic block mode is set by the user on a logic block by logic block basis. Product Term AllocatorThrough the product term allocator, software automatically distributes product terms among the 16 macrocells in the logic block as needed. A total of 80 product terms are available from the local product term array. The product term allocator provides two important capabilities without affecting perfor-mance: product term steering and product term sharing. Product Term SteeringProduct term steering is the process of assigning product terms to macrocells as needed. For example, if one macrocell requires ten product terms while another needs just three, the product term allocator will “steer” ten product terms to one macrocell and three to the other. On Ultra37000 devices,product terms are steered on an individual basis. Any number between 0 and 16 product terms can be steered to any macrocell. Note that 0 product terms is useful in cases where a particular macrocell is unused or used as an input register. Product Term SharingProduct term sharing is the process of using the same product term among multiple macrocells. For example, if more than one output has one or more product terms in its equation that are common to other outputs, those product terms are only programmed once. The Ultra37000 product term allocator allows sharing across groups of four output macrocells in avariable fashion. The software automatically takes advantage of this capability—the user does not have to intervene. Note that neither product term sharing nor product term steering have any effect on the speed of the product. All worst-case steering and sharing configurations have been incorporated in the timing specifications for the Ultra37000devices.Ultra37000 MacrocellWithin each logic block there are 16 macrocells. Macrocells can either be I/O Macrocells, which include an I/O Cell which is associated with an I/O pin, or buried Macrocells, which do not connect to an I/O. The combination of I/O Macrocells and buried Macrocells varies from device to device.Buried MacrocellFigure 2 displays the architecture of buried macrocells. The buried macrocell features a register that can be configured as combinatorial, a D flip-flop, a T flip-flop, or a level-triggered latch.The register can be asynchronously set or asynchronously reset at the logic block level with the separate set and reset product terms. Each of these product terms features program-mable polarity. This allows the registers to be set or reset based on an AND expression or an OR expression.Clocking of the register is very flexible. Four global synchronous clocks and a product term clock are available to clock the register. Furthermore, each clock features program-mable polarity so that registers can be triggered on falling as well as rising edges (see the Clocking section). Clock polarity is chosen at the logic block level.Figure 1. Logic Block with 50% Buried MacrocellsI/O CELL 0PRODUCT TERM ALLOCATORI/O CELL 14MACRO-CELL 0MACRO-CELL 1MACRO-CELL 140−16PRODUCT TERMS72x 87PRODUCT TERMARRAY8036816TO PIMFROM PIM732MACRO-CELL 152to cells2, 4, 6 8, 10, 120−16PRODUCT TERMS0−16PRODUCT TERMS0−16PRODUCT TERMSThe buried macrocell also supports input register capability.The buried macrocell can be configured to act as an input register (D-type or latch) whose input comes from the I/O pin associated with the neighboring macrocell. The output of all buried macrocells is sent directly to the PIM regardless of its configuration. I/O MacrocellFigure 2 illustrates the architecture of the I/O macrocell. The I/O macrocell supports the same functions as the buried macrocell with the addition of I/O capability. At the output of the macrocell, a polarity control mux is available to select active LOW or active HIGH signals. This has the added advantage of allowing significant logic reduction to occur in many appli-cations.The Ultra37000 macrocell features a feedback path to the PIM separate from the I/O pin input path. This means that if the macrocell is buried (fed back internally only), the associated I/O pin can still be used as an input.Bus Hold Capabilities on all I/OsBus-hold, which is an improved version of the popular internal pull-up resistor, is a weak latch connected to the pin that does not degrade the device’s performance. As a latch, bus-hold maintains the last state of a pin when the pin is placed in a high-impedance state, thus reducing system noise in bus-interface applications. Bus-hold additionally allows unused device pins to remain unconnected on the board,which is particularly useful during prototyping as designers can route new signals to the device without cutting trace connec-tions to V CC or GND. For more information, see the application note Understanding Bus-Hold—A Feature of Cypress CPLDs .Programmable Slew Rate ControlEach output has a programmable configuration bit, which sets the output slew rate to fast or slow. For designs concerned with meeting FCC emissions standards the slow edge provides for lower system noise. For designs requiring very high perfor-mance the fast edge rate provides maximum system perfor-mance.C2C3DECODE C2C3DECODE 0123OC6C5“0” “1”1OD/T/LQRP 0123OC001OC4FEEDBACK TO PIM FEEDBACK TO PIMBLOCK RESET0−16TERMSI/O MACROCELLI/O CELLFROM PTM1OD/T/LQRP FROM PTM 1OC7FEEDBACK TO PIMBURIED MACROCELLASYNCHRONOUS PRODUCT 0−16TERMSPRODUCT C140123Q4C24C0C1C24C25C254 SYNCHRONOUS CLOCKS (CLK0,CLK1,CLK2,CLK3)1 ASYNCHRONOUS CLOCK(PTCLK)BLOCK PRESETASYNCHRONOUSFASTSLOWC26SLEW011011OE0OE1Figure 2. I/O and Buried MacrocellsClockin gEach I/O and buried macrocell has access to four synchronous clocks (CLK0, CLK1, CLK2 and CLK3) as well as an asynchronous product term clock PTCLK. Each input macrocell has access to all four synchronous clocks.Dedicated Inputs/ClocksFive pins on each member of the Ultra37000 family are desig-nated as input-only. There are two types of dedicated inputs on Ultra37000 devices: input pins and input/clock pins.Figure 3 illustrates the architecture for input pins. Four input options are available for the user: combinatorial, registered,double-registered, or latched. If a registered or latched option is selected, any one of the input clocks can be selected for control.Figure 4 illustrates the architecture for the input/clock pins.Like the input pins, input/clock pins can be combinatorial,registered, double-registered, or latched. In addition, these pins feed the clocking structures throughout the device. The clock path at the input has user-configurable polarity. Product Term ClockingIn addition to the four synchronous clocks, the Ultra37000family also has a product term clock for asynchronous clocking. Each logic block has an independent product term clock which is available to all 16 macrocells. Each product term clock also supports user configurable polarity selection.Timing ModelOne of the most important features of the Ultra37000 family is the simplicity of its timing. All delays are worst case and system performance is unaffected by the features used. Figure 5 illustrates the true timing model for the 167-MHz devices in high speed mode. For combinatorial paths, any input to any output incurs a 6.5-ns worst-case delay regardless of the amount of logic used. For synchronous systems, the input set-up time to the output macrocells for any input is 3.5 ns and the clock to output time is also 4.0 ns. These measurements are for any output and synchronous clock, regardless of the logic used.The Ultra37000 features:•No fanout delays •No expander delays•No dedicated vs. I/O pin delays •No additional delay through PIM •No penalty for using 0–16 product terms •No added delay for steering product terms •No added delay for sharing product terms •No routing delays •No output bypass delaysThe simple timing model of the Ultra37000 family eliminates unexpected performance penalties.Figure 4. Input/Clock MacrocellFigure 3. Input Macrocell0123OC10C11TO PIMDQDQD QLEINPUT/CLOCK PIN012OFROM CLOCK CLOCK PINS01OC12TO CLOCK MUX ONALL INPUT MACROCELLSTO CLOCK MUX IN EACH301CLOCK POLARITY MUX ONE PER LOGIC BLOCK FOR EACH CLOCK INPUTPOLARITY INPUTLOGIC BLOCKC8C9C13,C14,C15OR C16O 0123O C12C13TO PIMDQDQD QLEINPUT PIN012OC10FROM CLOCK POLARITY MUXES3C11JTAG and PCI StandardsPCI Compliance5V operation of the Ultra37000 is fully compliant with the PCI Local Bus Specification published by the PCI Special Interest Group. The 3.3V products meet all PCI requirements except for the output 3.3V clamp, which is in direct conflict with 5V tolerance. The Ultra37000 family’s simple and predictable timing model ensures compliance with the PCI AC specifica-tions independent of the design. IEEE 1149.1-compliant JTAGThe Ultra37000 family has an IEEE 1149.1 JTAG interface for both Boundary Scan and ISR.Boundary ScanThe Ultra37000 family supports Bypass, Sample/Preload,Extest, Idcode, and Usercode boundary scan instructions. The JTAG interface is shown in Figure 6.In-System Reprogramming (ISR)In-System Reprogramming is the combination of the capability to program or reprogram a device on-board, and the ability to support design changes without changing the system timing or device pinout. This combination means design changes during debug or field upgrades do not cause board respins.The Ultra37000 family implements ISR by providing a JTAG compliant interface for on-board programming, robust routingresources for pinout flexibility, and a simple timing model for consistent system performance.Development Software SupportWarpWarp is a state-of-the-art compiler and complete CPLD design tool. For design entry, Warp provides an IEEE-STD-1076/1164VHDL text editor, an IEEE-STD-1364 Verilog text editor, and a graphical finite state machine editor. It provides optimized synthesis and fitting by replacing basic circuits with ones pre-optimized for the target device, by implementing logic in unused memory and by perfect communication between fitting and synthesis. To facilitate design and debugging, Warp provides graphical timing simulation and analysis. Warp Professional ™Warp Professional contains several additional features. It provides an extra method of design entry with its graphical block diagram editor. It allows up to 5 ms timing simulation instead of only 2 ms. It allows comparison of waveforms before and after design changes.Warp Enterprise ™Warp Enterprise provides even more features. It provides unlimited timing simulation and source-level behavioral simulation as well as a debugger. It has the ability to generate graphical HDL blocks from HDL text. It can even generate testbenches.Warp is available for PC and UNIX platforms. Some features are not available in the UNIX version. For further information see the Warp for PC , Warp for UNIX, Warp Professional and Warp Enterprise data sheets on Cypress’s web site ().Third-Party SoftwareAlthough Warp is a complete CPLD development tool on its own, it interfaces with nearly every third party EDA tool. All major third-party software vendors provide support for the Ultra37000 family of devices. Refer to the third-party software data sheet or contact your local sales office for a list of currently supported third-party vendors.ProgrammingThere are four programming options available for Ultra37000devices. The first method is to use a PC with the 37000UltraISR programming cable and software. With this method,the ISR pins of the Ultra37000 devices are routed to a connector at the edge of the printed circuit board. The 37000UltraISR programming cable is then connected between the parallel port of the PC and this connector. A simple configu-ration file instructs the ISR software of the programming operations to be performed on each of the Ultra37000 devices in the system. The ISR software then automatically completes all of the necessary data manipulations required to accomplish the programming, reading, verifying, and other ISR functions.For more information on the Cypress ISR Interface, see the ISR Programming Kit data sheet (CY3700i).The second method for programming Ultra37000 devices is on automatic test equipment (ATE). This is accomplished through a file created by the ISR software. Check the Cypress website for the latest ISR software download information.Figure 5. Timing Model for CY37128Figure 6. JTAG InterfaceCOMBINATORIAL SIGNALREGISTERED SIGNALD,T,LOCLOCKINPUTINPUTOUTPUTOUTPUTt S = 3.5 nst CO = 4.5 nst PD = 6.5 ns Instruction RegisterBoundary Scan idcode Usercode ISR Prog.Bypass Reg.Data RegistersJTAG TAPCONTROLLERTDOTDITMS TCKThe third programming option for Ultra37000 devices is to utilize the embedded controller or processor that already exists in the system. The Ultra37000 ISR software assists in this method by converting the device JEDEC maps into the ISR serial stream that contains the ISR instruction information and the addresses and data of locations to be programmed. The embedded controller then simply directs this ISR stream to the chain of Ultra37000 devices to complete the desired reconfiguring or diagnostic operations. Contact your local sales office for information on availability of this option.The fourth method for programming Ultra37000 devices is to use the same programmer that is currently being used to program F LASH370i devices.For all pinout, electrical, and timing requirements, refer to device data sheets. For ISR cable and software specifications, refer to the UltraISR kit data sheet (CY3700i).Third-Party ProgrammersAs with development software, Cypress support is available on a wide variety of third-party programmers. All major third-party programmers (including BP Micro, Data I/O, and SMS) support the Ultra37000 family.Logic Block DiagramsCY37032/CY37032VLOGIC BLOCK B LOGIC BLOCK A36163616Input Clock/Input 16 I/Os16 I/OsI/O 0−I/O 15I/O 16−I/O 314441616TDI TCK TMSTDOJTAG Tap Controller1PIMJTAG ENLOGIC BLOCK D LOGIC BLOCK CLOGIC BLOCK A LOGIC BLOCK B3616361636163616InputClock/Input16 I/Os16 I/Os16 I/Os16 I/OsI/O 0-I/O 15I/O 16-I/O 31I/O 48-I/O 63I/O 32-I/O 474443232TDI TCK TMSTDOJTAG Tap Controller1PIMCY37064/CY37064V (100-Lead TQFP)Logic Block Diagrams (continued)TDITCK TMSTDOJTAG Tap ControllerCY37128/CY37128V (160-lead TQFP)PIMINPUTMACROCELL CLOCKINPUTS 4436161636LOGIC BLOCK3616163616 I/Os3636361616361616646441INPUT/CLOCK MACROCELLSI/O 0–I/O 15AINPUTS LOGIC BLOCKCLOGIC BLOCKBLOGIC BLOCKDLOGIC BLOCKHLOGIC BLOCKGLOGIC BLOCKFLOGIC BLOCKEI/O 16–I/O 31I/O 32–I/O 47I/O 28–I/O 63I/O 112–I/O 127I/O 96–I/O 111I/O 80–I/O 95I/O 64–I/O 7916 I/Os16 I/Os16 I/Os16 I/Os16 I/Os16 I/Os16 I/OsJTAG ENLOGIC BLOCK H LOGIC BLOCK L LOGIC BLOCKI LOGIC BLOCK J LOGIC BLOCK K LOGIC BLOCK A LOGIC BLOCK B LOGIC BLOCK C LOGIC BLOCK D LOGIC BLOCK E LOGIC BLOCK G LOGIC BLOCK F361636163616361636163616361636163616361636163616PIMInput Clock/Input 10 I/Os10 I/Os10 I/Os10 I/Os10 I/Os10 I/Os10 I/Os10 I/Os10 I/Os10 I/Os10 I/Os10 I/OsI/O 0–I/O 9I/O 10–I/O 19I/O 20–I/O 29I/O 30–I/O 39I/O 40–I/O 49I/O 50–I/O 59I/O 110–I/O 119I/O 100–I/O 109I/O 90–I/O 99I/O 80–I/O 89I/O 70–I/O 79I/O 60–I/O 694446060TDI TCK TMSTDOJTAG Tap Controller1CY37192/CY37192V (160-lead TQFP)Logic Block Diagrams (continued)CY37256/CY37256V (256-lead BGA)LOGIC BLOCK G LOGIC BLOCK HLOGIC BLOCKI LOGIC BLOCK J LOGIC BLOCK L LOGIC BLOCK P LOGIC BLOCK M LOGIC BLOCK N LOGIC BLOCK O LOGIC BLOCK A LOGIC BLOCK B LOGIC BLOCK C LOGIC BLOCK D LOGIC BLOCK E LOGIC BLOCK K LOGIC BLOCK F 3616361636163616361636163616361636163616361636163616361636163616PIMInput Clock/Input 12 I/Os12 I/Os12 I/Os12 I/Os12 I/Os12 I/Os12 I/Os 12 I/Os12 I/Os12 I/Os12 I/Os12 I/Os12 I/Os12 I/Os12 I/Os12 I/OsI/O 0−I/O 11I/O 12−I/O 23I/O 24−I/O 35I/O 36−I/O 47I/O 48−I/O 59I/O 60−I/O 71I/O 72−I/O 83I/O 84−I/O 95I/O 180−I/O 191I/O 168−I/O 179I/O 156−I/O 167I/O 144−I/O 155I/O 132−I/O 143I/O 120−I/O 131I/O 108−I/O 119I/O 96−I/O 1074449696TDI TCK TMSTDOJTAG Tap Controller1Logic Block Diagrams (continued)CY37384/CY37384V (256-Lead BGA)LOGIC BLOCK AH LOGIC BLOCK AI LOGIC BLOCK BD LOGIC BLOCK BE LOGIC BLOCK BG LOGIC BLOCK BL LOGIC BLOCK BI LOGIC BLOCK BJ LOGIC BLOCK BK LOGIC BLOCK AA LOGIC BLOCK AB LOGIC BLOCK AC LOGIC BLOCK ADLOGIC BLOCK AFLOGIC BLOCK BF LOGIC BLOCK AG 3616361636163616361636163616361636163616361636163616361636163616PIMInput Clock/Input 12 I/Os12 I/Os12 I/Os12 I/Os12 I/Os12 I/Os12 I/Os12 I/Os12 I/Os12 I/Os12 I/OsI/O 0−I/O 11I/O 12−I/O 23I/O 24−I/O 35I/O 48−I/O 59I/O 60−I/O 71I/O 72−I/O 83I/O 168−I/O 191I/O 156−I/O 179I/O 144−I/O 167I/O 120−I/O 143I/O 108−I/O 1314449696TDI TCK TMSTDOJTAG Tap Controller1LOGIC BLOCK AJLOGIC BLOCK BC 161612 I/OsI/O 96−I/O 119LOGIC BLOCK AK LOGIC BLOCK BB 161612 I/OsI/O 84−I/O 95LOGIC BLOCK ALLOGIC BLOCK BA161612 I/OsI/O 96−I/O 107LOGIC BLOCK AE LOGIC BLOCK BH 161612 I/Os12 I/OsI/O 36−I/O 47I/O 132−I/O 1553636363636363636Logic Block Diagrams (continued)CY37512/CY37512V (352-Lead BGA)LOGIC BLOCK AG LOGIC BLOCK AHLOGIC BLOCK BI LOGIC BLOCK BJ LOGIC BLOCK BL LOGIC BLOCK BP LOGIC BLOCK BM LOGIC BLOCK BN LOGIC BLOCK BO LOGIC BLOCK AA LOGIC BLOCK AB LOGIC BLOCK AC LOGIC BLOCK ADLOGIC BLOCK AE LOGIC BLOCK BK LOGIC BLOCK AF361636163616361636163616361636363616361636163616361636163616Input Clock/Input 12 I/Os12 I/Os12 I/Os12 I/Os12 I/Os12 I/Os12 I/Os12 I/Os12 I/Os12 I/Os12 I/Os12 I/Os12 I/OsI/O 0−I/O 11I/O 12−I/O 23I/O 24−I/O 35I/O 36−I/O 47I/O 48−I/O 59I/O 60−I/O 71I/O 72−I/O 83I/O 84−I/O 95I/O 252−I/O 263I/O 240−I/O 251I/O 228−I/O 239I/O 216−I/O 227I/O 204−I/O 215444TDI TCK TMSTDOJTAG T ap Controller1PIM16363616LOGIC BLOCK AI LOGIC BLOCK BH 12 I/OsI/O 96−I/O 10716363616LOGIC BLOCK AJLOGIC BLOCK BG 12 I/Os12 I/OsI/O 108−I/O 119I/O 192−I/O 20316363616LOGIC BLOCK AK LOGIC BLOCK BF 12 I/OsI/O 120−I/O 13116363616LOGIC BLOCK AL LOGIC BLOCK BE 12 I/OsI/O 180−I/O 19116363616LOGIC BLOCK AM LOGIC BLOCK BD 12 I/OsI/O 168−I/O 17916363616LOGIC BLOCK AN LOGIC BLOCK BC 12 I/OsI/O 156−I/O 16716363616LOGIC BLOCK AO LOGIC BLOCK BB 12 I/OsI/O 144−I/O 155********LOGIC BLOCK AP LOGIC BLOCK BA 12 I/OsI/O 132−I/O 1431613216。
SMP100-xxxH225中文资料

®
SMP100-xxx SMP100-xxxH225
TRISIL TM
FEATURES BIDIRECTIONAL CROWBAR PROTECTION VOLTAGE RANGE : FROM 8V to 320V REPETITIVE PEAK PULSE CURRENT: IPP = 100 A (10/1000 µs) HOLDING CURRENT: IH = 150mA or 225mA LOW LEAKAGE CURRENT: IR = 2 µA max DESCRIPTION The SMP100 series are transient surge arrestors used for the protection of sensitive telecom equipment. MAIN APPLICATIONS Any sensitive equipment requiring protection against lightning strikes : ANALOG AND DIGITAL LINE CARDS MAIN DISTRIBUTION FRAMES TERMINALS AND TRANSMISSION EQUIPMENT GAS-TUBE REPLACEMENT BENEFITS NO AGEING AND NO NOISE IF DESTROYED, THE SMP100 FALLS INTO SHORT CIRCUIT,STILLENSURINGPROTECTION BOARD SPACE SAVING COMPLIES WITH THE FOLLOWING STANDARDS: CCITT K20 VDE0433 VDE0878 IEC-1000-4-5 FCC Part 68, lightning surge type A FCC Part 68, lightning surge type B BELLCORE TR-NWT-001089 First level BELLCORE TR-NWT-001089 Second level CNET l31-24
上海XYZ机械有限公司 FZ 系列产品说明书

FZ SERIES:Function Modules Centering DeviceF ZG B-903 F Z G B-904FZCD - L x H x GAngle Gear Unit-3 direction Angle Gear Unit – 4 directionUOM : Unit UOM : UnitUOM : UnitUOM : UnitUOM : UnitApplication: Positioning of products at center of conveyorStandard Arm Length (L): 100mm, 150mm , 200mm , 250 mmStandard Arm Height (H): 50mm, 100mm , 150mmStandard Arm Gap (G): 140 mm (FS) , 160mm (FM) , 180mm (FC) ,225mm (FL) , 255mm (FU) , 374mm (FW)Applicable to all FlexMove chain series.Please specify :1) Conveyor Series2) Product Dimension (L x W x H) during order.6Width Adjustment Actuator 660mmWidth Adjustment Actuator 950mm108109FZ SERIESUOM : UnitApplication: Product flow control / merging.Standard Arm Length (L): 50 mm, 150 mm , 200 mm , 250 mm , 300 mmStandard Arm Height (H): 50 mm, 100 mm , 150 mmStandard Arm Gap (G): 360 mm (FS) , 420 mm (FM) , 480 mm (FC) , 615 mm ( FL) , 705 mm ( FU) , 1065 mm (FW)Applicable to all FlexMove chain series.Please specify : 1) Conveyor Series2) Product Dimension (L x W x H) during order.FZPTC – L x H x GUOM : UnitApplication: Product flow control / merging.Standard Arm Length (L): 100 mm, 150 mm , 200 mm , 250 mm Standard Arm Angle (A): 45° , 90°Applicable to all FlexMove chain series.Please specify : 1) Conveyor Series2) Product Dimension (L x W x H) 3) Diverting Angle during order.Angle Traffic CopFZATC – L x AUOM : UnitAdjustment Side GuideFZASG – H x WApplication: Manual adjustable guide rail for multiple product sizeStandard Arm Height (H): 100 mm, 150 mm , 200 mm , 250 mmAdjustable Width (W): 65 mm , 85 mm , 105 mm , 150 mm , 225 mm , 300 mm Applicable to all FlexMove chain series.Please specify : 1) Conveyor Series2) Product Dimension (L x W x H)110UOM : UnitApplication: Pneumatic-controlled automatic diversion of products from one track to anotherStandard Arm Length (L): 300 mm - 700 mm Standard Arm Height (H): 100 mm, 150 mm , 200 mm Standard Arm Angle (A): 5° - 60°Applicable to all FlexMove chain series.Please specify : 1) Conveyor Series2) Product Dimension (L x W x H)3) Diverting Angle during order.FZAD – L x H x AUOM : UnitApplication: Manually-controlled diversion of products from one track to another.Standard Arm Length (L): 300 mm – 700 mmStandard Arm Height (H): 100 mm, 150 mm , 200 mm , 250 mmStandard Arm Angle (A): 5° - 60°Applicable to all FlexMove chain series. Please specify: 1) Conveyor Series2) Product Dimension (L x W x H) during order.Manual DiverterFZMD – L x H x AFZ SERIES。
Spyker BCS25 25lb Bag Spreader 产品说明书

1
20 1019476 Combination Gear
1
21 1019597
Screw; Thread Forming, M4 x 10
1
22 1019478 Cotter Pin, 4 mm
1
23 1020071 Nut, M8 x 1.25
2
24 1020064 Shoulder Pad *
1
* not illustrated
19
Additional parts in the box:
17 1019498 Broadcast Shield
1
18 1019504 Handle Assembly
1
19 1019505 Bag Support Rod
1
16
7
7
14 12
20
7 13 12
Operator's Manual
BCS25 - 25lb Bag Spreader
Spyker Spreaders
Contact us at 800.972.6130
! ! IMPORTANT This manual contains information for the safety of persons and property.
Read it carefully before assembly and operation of the equipment!
English Manual
Page 1
1019501-B
Table of Contents + Safety
Table of Contents
Safety ������������������������������������������ 2 Parts ��������������������������������������������������� 3 Assembly ������������������������������������ 4 Use and Care ��������������������������� 5-7
MCF25Z-100JB资料
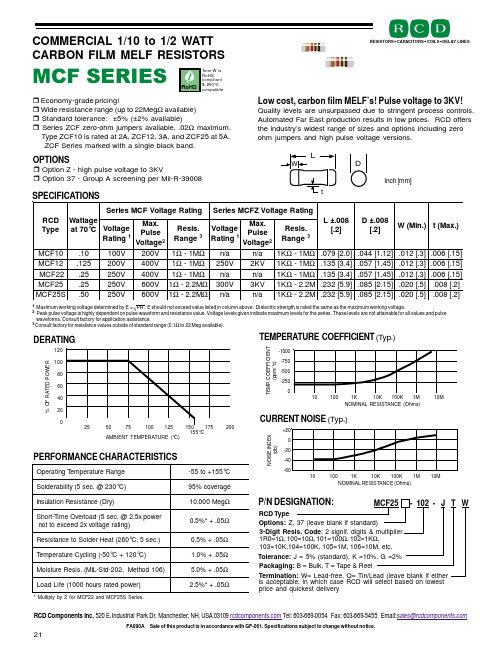
values and
pulse
waveforms. Consult factory for application assistance. 3 Consult factory for resistance values outside of standard range (0.1Ω to 22 Meg available).
RCD Components Inc, 520 E.Industrial Park Dr, Manchester, NH, USA 03109 Tel: 603-669-0054 Fax: 603-669-5455 Email:sales@
1பைடு நூலகம்2
Maximum working voltage determined by E =√PR , E should not exceed value listed in column above. Dielectric strength is rated the same as the maximum working voltage.
MCF25 .25 250V 600V 1Ω - 2.2MΩ 300V 3KV 1KΩ - 2.2M .232 [5.9] .085 [2.15] .020 [.5] .008 [.2]
MCF25S .50 250V 600V 1Ω - 2.2MΩ n/a
n/a 1KΩ - 2.2M .232 [5.9] .085 [2.15] .020 [.5] .008 [.2]
MCF12 .125 200V 400V 1Ω - 1MΩ 250V 2KV 1KΩ - 1MΩ .135 [3.4] .057 [1.45] .012 [.3] .006 [.15]
EGFZ30K资料
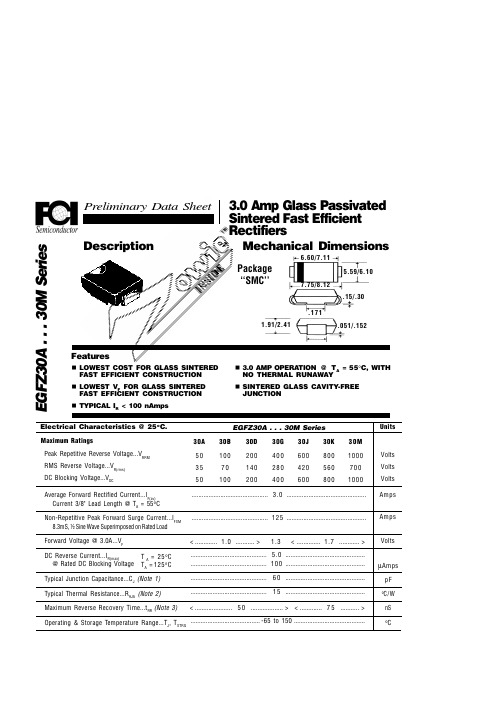
DescriptionMechanical DimensionsElectrical Characteristics @ 25o C.Maxi mum Rati ngsPeak Repetitive Reverse Voltage...V RRM RMS Reverse Voltage...V R(rms)DC Blocking Voltage...V DCEGFZ30A . . . 30M SeriesAverage Forward Rectified Current...I F(av)Current 3/8" Lead Length @ T A = 55°C Non-Repetitive Peak Forward Surge Current...I FSM8.3mS, ½ Sine Wave Superimposed on Rated Load Forward Voltage @ 3.0A...V F DC Reverse Current...I R(max)@ Rated DC Blocking VoltageTypical J unction Capacitance...C J (Note 1)Typical Thermal Resistance...R θJA (Note 2)Maximum Reverse Recovery Time...t RR (Note 3)Operating & Storage Temperature Range...T J , T STRG Preliminary Data Sheet 3.0 Amp Glass Passivated Sintered Fast Efficient Rectifiers............................................. 3.0............................................................................................125...............................................Volts Volts Volts UnitsE GF Z 30A . . . 30M S e r i e sAmps Amps VoltsµAmps pF °C / W nS °C............................................. 5.0............................................................................................100............................................................................................60............................................................................................15........................................................................................-65 to 150..........................................30A 30B 30D 30G 30J 30K 30M 5010020040060080010003570140280420560700501002004006008001000T A =25°C T A =125°CFeaturesn LOW EST COST FOR GLASS SINTERED FAST EFFICIENT CONSTRUCTION n LOW EST V F FOR GLASS SINTERED FAST EFFICIENT CONSTRUCTION n TYPICAL I R < 100 nAmpsn 3.0 AMP OPERA TION @ T A = 55°C, WITH NO THERMAL RUNAWAY n SINTERED GLASS CAVITY -FREE JUNCTIONPreliminary Data Sheet Ratings at25 Deg. C ambient temperature unless otherwise specified.Single Phase Half Wave, 60 HZ Resistive or Inductive Load.For Capacitive Load, Derate Current by 20%.NOTES: 1.Measured @ 1 MHZ and applied reverse voltage of 4.0V.2.Thermal Resistance from Junction to Ambient at 3/8" Lead Length, P .C. Board Mounted.3.Reverse Recovery Condition I F = 0.5A, I R = 1.0A, I RR = 0.25A.Forward Current Derati ng CurveAmbient Tempera ture (°C)Junction Ca pa cita nce (pF)Typi cal Reverse Characteri sti csNon-Repeti ti ve Peak Forward Surge Current F o r w a r d C u r r e n t (A )Percent of Ra ted Pea k Volta ge (%)Typi cal Instantaneous Forward Characteri sti csForwa rd Volta ge (V)Typi cal Juncti on Capaci tancePea k Forwa rd Surge Current (A)E GF Z 30A . . . 30M S e r i e s3.0 Amp Glass PassivatedSintered Fast Efficient Rectifiers。
爱立智麦勒尔ZB系列电机保护开关产品说明书

Eaton 278442Eaton Moeller® series ZB Motorschutzrelais, ZB32, Ir= 0,1 - 0,16A, 1 S, 1 Ö, Direktmontage, IP20Allgemeine spezifikationEaton Moeller® series ZB Thermaloverload relay278442401508278442396 mm67 mm45 mm0.141 kgUL File No.: E29184CSA Class No.: 3211-03CSA-C22.2 No. 60947-4-1-14 IEC/EN 60947VDE 0660IEC/EN 60947-4-1ULUL Category Control No.: NKCR CSA File No.: 012528CECSAUL 60947-4-1Überlastrelais thermisch ZB32-0,16Produktname KatalognummerEANProdukt Länge/Tiefe Produkthöhe Produktbreite Produktgewicht Zertifikat(e)ProdukttypModellcodePhasenausfallempfindlichkeit (gemäß IEC/EN 60947, VDE 0660 Teil 102)Reset-Taste Hand/Auto Freiauslösung Test/Aus-Taste-25 °C55 °C25 °C40 °C CLASS 10 A Feuchte Wärme, konstant, nach IEC 60068-2-78 Feuchte Wärme, zyklisch, nach IEC 60068-2-30IP20ZB32Direct attachment Direktanbau0.1 A0.16 AIII3Finger- und handrückensicher, Berührungsschutz bei senkrechter Betätigung von vorne (EN 50274)MerkmaleUmgebungsbetriebstemperatur – min Umgebungsbetriebstemperatur – max Umgebungsbetriebstemperatur (gekapselt) – min Umgebungsbetriebstemperatur (gekapselt) – max Klasse KlimafestigkeitSchutzart Rahmengr.Montageart Überlastauslösestromeinstellung - min Überlastauslösestromeinstellung - max Überspannungskategorie Verschmutzungsgrad Produktkategorie SchutzZubehörMotorschutzrelais ZB bis 150 A6000 V AC4000 V (Hilfs- und Steuerkreise)10 g, Mechanisch, Sinusförmig, Schockdauer 10 ms Nebenstromkreise, (UL/CSA)≤ 0,25 %/K, Restfehler für T > 40° Kontinuierlich 2 x (0,75 - 2,5) mm², Steuerstromleitungen2 x (1 - 4) mm², Hauptleiter1 x (1 - 4) mm², Hauptleiter1 x (0,75 - 2,5) mm², Steuerstromleitungen1 x (0,75 - 4) mm², Steuerstromleitungen2 x (0,75 - 4) mm², Steuerstromleitungen1 x (1 - 6) mm², Hauptleiter2 x (1 - 6) mm², Hauptleiter2 x (18 - 14), Steuerstromleitungen18 - 8, Hauptleiter10 mm8 mmM3,5, Anschlussschraube, HilfsleiterM4, Anschlussschraube2, Anschlussschraube, Pozidriv-Schraubendreher1 x 6 mm, Anschlussschraube, Schlitzschraubendreher1,2 Nm, Schraubklemmen, Steuerstromleitungen1.8 Nm, Schraubklemmen, Hauptleiter6 A 1.5 A 1.5 A 0.9 A 100 kA, Sicherung, SCCR (UL/CSA)1 A, Klasse J/CC, max. Sicherung, SCCR (UL/CSA)0,5 A gG/gL, Sicherung, Zuordnungsart "2"Max. 6 A gG/gL, Sicherung, Ohne Verschweißen, Hilfs- und Steuerkreise25 A gG/gL, Sicherung, Zuordnungsart "1"Bemessungsstoßspannungsfestigkeit (Uimp)Schockfestigkeit Geeignet für Temperaturkompensation Anschlusskapazität (freindrähtig mit Aderendhülse) Anschlusskapazität (fest)Anschlusskapazität (ein-/mehrdrähtig AWG) Abisolierlänge (Hauptleiter)Abisolierlänge (Hilfsleiter)Schr-GröSchraubendrehergrößeAnzugsdrehmomentKonventioneller thermischer Strom lth der Hilfskontakte (1-polig, offen)Bemessungsbetriebsstrom (le) bei AC-15, 120 V Bemessungsbetriebsstrom (le) bei AC-15, 220 V, 230 V, 240 V Bemessungsbetriebsstrom (le) bei AC-15, 380 V, 400 V, 415 V Bemessungskurzschlussstrom (hoher Fehlerstrom bei 600 V) Bemessungsdaten Kurzschlussschutz0.4 A0.2 A0.9 A0.75 A690 V440 V, Zwischen Hilfskontakten und Hauptkontakten, Entspricht EN 61140440 V AC, zwischen den Hauptstrombahnen, Entspricht EN 61140240 V AC, Zwischen Hilfskontakten, Entspricht EN 61140B300 bei gegenüberliegender Polarität, AC-betätigt (UL/CSA) B600 bei gegenüberliegender Polarität, AC-betätigt (UL/CSA) R300, DC-betätigt (UL/CSA)600 VAC600 VAC 011115.4 W0 W1.8 W0.16 A0 WAnforderungen der Produktnorm sind erfüllt.Anforderungen der Produktnorm sind erfüllt.Anforderungen der Produktnorm sind erfüllt.Anforderungen der Produktnorm sind erfüllt.Anforderungen der Produktnorm sind erfüllt.Unzutreffend, da die gesamten Schaltgeräte überprüft werdenBemessungsbetriebsstrom (le) bei DC-13, 110 VBemessungsbetriebsstrom (le) bei DC-13, 220 V, 230 V Bemess.betriebsstrom (le) bei DC-13, 24 V Bemessungsbetriebsstrom (le) bei DC-13, 60 V Bemessungsbetriebsspannung (Ue) - maxSichere TrngSchaltvermögen (Hilfskontakte, Steuerzyklus) Nennspannung - maxNennspannung - max Anzahl der Hilfskontakte (Wechsler)Anzahl der Hilfskontakte (Öffner)Anzahl Hilfskontakte (Schließer)Anzahl der Kontakte (Öffner)Anzahl der Kontakte (Schließer)Geräteverlustleistung, stromabhängig pvid Verlustleistungskapazität PdissVerlustleistung pro Pol, stromabhängig, Pvid Bemessungsbetriebsstrom zur Verlustleistungsangabe (In) Statische Verlustleistung, stromunabhängig PVS10.2.2 Korrosionsbeständigkeit10.2.3.1 Wärmebeständigkeit von Umhüllung10.2.3.2 Widerstandsfähigkeit Isolierstoffe gewöhnliche Wärme 10.2.3.3 Widerst. Isolierstoffe abnorm. Wärme/Feuer durch int. elektr. Auswirk.10.2.4 Beständigkeit gegen UV-Strahlung10.2.5 Hebenmüssen.Unzutreffend, da die gesamten Schaltgeräte überprüft werdenmüssen.Anforderungen der Produktnorm sind erfüllt.Unzutreffend, da die gesamten Schaltgeräte überprüft werden müssen.Anforderungen der Produktnorm sind erfüllt.Unzutreffend, da die gesamten Schaltgeräte überprüft werden müssen.Unzutreffend, da die gesamten Schaltgeräte überprüft werden müssen.Liegt in der Verantwortung des Schaltanlagenbauers.Liegt in der Verantwortung des Schaltanlagenbauers.Liegt in der Verantwortung des Schaltanlagenbauers.Liegt in der Verantwortung des Schaltanlagenbauers.Liegt in der Verantwortung des Schaltanlagenbauers.Die Erwärmungsberechnung liegt in der Verantwortung des Schaltanlagenbauers. Eaton stellt Verlustleistungsdaten der Geräte bereit.Liegt in der Verantwortung des Schaltanlagenbauers. Die Spezifikationen für die Schaltgeräte müssen beachtet werden.Liegt in der Verantwortung des Schaltanlagenbauers. Die Spezifikationen für die Schaltgeräte müssen beachtet werden.Das Gerät erfüllt die Anforderungen, wenn die Informationen in eaton-motor-protective-relay-zb12-zb32-overload-monitoring-exe-manual-mn03407004z-de-de-en-us.pdfDA-DC-00004853.pdfDA-DC-00004843.pdfETN.ZB32-0,16IL03407015ZIL03407195ZSortimentskatalog Motoren schalten und schützenDA-CD-zb32DA-CS-zb3210.2.6 Schlagprüfung10.2.7 Beschriftungen10.3 Schutzart von Baugruppen10.4 Luft- und Kriechstrecken10.5 Schutz gegen elektrischen Schlag10.6 Einbau von Betriebsmitteln10.7 Innere Stromkreise und Verbindungen10.8 Anschlüsse für von außen eingeführte Leiter 10.9.2 Betriebsfrequente Spannungsfestigkeit 10.9.3 Stoßspannungsfestigkeit10.9.4 Prüfung von Umhüllungen aus Isolierstoff 10.10 Erwärmung10.11 Kurzschlussfestigkeit10.12 Elektromagnetische Verträglichkeit10.13 Mechanische Funktion Benutzerhandbücher Declarations of conformity eCAD model Installationsanleitung KatalogemCAD modelEaton Konzern plc Eaton-Haus30 Pembroke-Straße Dublin 4, Irland © 2023 Eaton. Alle Rechte vorbehalten. Eaton ist eine eingetrageneMarke.Alle anderen Warenzeichen sindEigentum ihrer jeweiligenBesitzer./socialmediader Montageanweisung (IL) beachtet werden.。
中央铬钢RB-2530产品数据材料和结构说明书

Applications• Acids • Caustics • Salts• Solvents• Chemical Process SolutionsCentricast ® RB-2530 Product DataMaterials and ConstructionAll pipe is manufactured with glass fabrics and a highly resilient formulation of aromatic amine cured epoxy resin. A 100 mil integral corrosion barrier of pure resin provides excellent corrosion resistance. The pipe’s proprietary resin formulation provides the toughness for many corrosive slurries. A 10 mil resin-rich reinforced external corrosion barrier proves excellent corrosion resistance and protection from ultraviolet (UV) radiation. Fiber Glass Systems warrants CENTRICAST RB-2530 pipe and fittings against UV degradation of physical properties and chemical resistance for 15 years.Pipe is available in 1” through 14” diameters with pressure ratings up to 150 psig, with higher pressure ratings in smaller sizes. Centricast RB-2530 comes in 20’ nominal or exact lengths from 18.0-20.4 feet long.FittingsFittings are manufactured with the samechemical/temperature capabilities as the pipe. Depending on the particular part and size, fittings will be compression molded, contact molded, hand fabricated or filament wound.Joining SystemsSocket JointAdhesive bonded straight socket joint with positive stops. This is thestandard for Centricast piping systems.•***************Testing:See NOV Fiber Glass Systems’ Socket Joint Installation Handbook.When possible, the piping system should be hydrostatically tested prior to beginning service. Care should be taken when testing to avoid water hammer. All anchors, guides and supports must be in place prior to testing the line.Test pressure should not be more than 1½ times the working pressure of the piping system and never exceed 1½ times the rated operating pressure of the lowest rated component in the system.Water Hammer:Care should be taken when designing an FRP piping system to eliminate sudden surges. Soft start pumps and slow actuating valves should be considered.ASTM D2997 Designation Codes:1”RTRP-21CW-4356 1½”-4”RTRP-21CW-4456 6”-8”RTRP-21CW-4455 10”-12”RTRP-21CW-445414”RTRP-21CW-4553(1)Static pressure ratings, typically created with use of a gear turbine, centrifugal, or multiplex pump having 4 or more pistons or elevation head.(2)Specially fabricated higher pressure fittings are available on request. Consult the factory for compressible gases. For insulated and/ or heat traced piping systems, use 100% of the uninsulated piping recommendations up to 200°F and reduce these ratings 50% for 200°F to 250°F operating temperatures. For uninsulated piping systems, reduce these ratings 30% for 225°F to 250°F operating temperatures. Heat cured adhesive joints are highly recommended for all piping systems carrying fluids at temperatures above 120°F.(3)Socket elbows, tees, reducers, couplings, flanges and nipples joined with Weldfast ZC-275 adhesive.(4)Flanged elbows, tees, reducers, couplings and nipples assembled at factory.(5)Laterals, crosses, and saddles.(6)Ratings shown are 50% of ultimate; 14.7 psi external pressure is equalto full vacuum.SupportProper pipe support spacing depends on the temperature and weight of the fluid in the pipe. The support spacing table is basedon unrestrained continuous beam theory using the pipe bending modulus derived from long-term beam bending tests. The maximum spans lengths were developed to ensure a design that limits mid-span deflection to ½ inch and dead weight bending to 1/8of the ultimate bending stress. Any additional loads on the piping system such as insulation, wind, seismic, etc. requires further consideration. Restrained (anchored) piping systems operating at elevated temperatures may result in guide spacing requirements that are shorter than unrestrained piping systems. In this case, the maximum guide spacing governs the support span requirements for the system. Pipe spans near elbows require special attention. Both supported and unsupported elbows are considered in the following tables and must be followed to properly design the piping system.There are seven basic rules to follow when designing piping system supports: 1. Do not exceed the recommended support span.2. Support heavy valves and in-line equipment independently.3. Protect pipe from external abrasion at supports.4.Avoid point contact loads.5. Avoid excessive bending. This applies to handling, transporting, initial layout, and final installed position.6. Avoid excessive vertical loading to minimize bending stresses on pipe and fittings.7. Provide adequate axial and lateral restraint to ensure linestability during rapid changes in flow.Support Spacing vs. Specific GravitySpecific Gravity 3.00 2.00 1.50 1.25 1.000.75Gas/Air Multiplier0.760.840.900.951.001.071.40Example: 6” pipe @ 150°F with 1.5 specific gravity fluid, maximumsupport spacing = 25.7 x 0.90 = 23.1 ft.Adjustment Factors for Various Spans With Unsupported Fitting at Change in DirectionSpan TypeFactor aContinuous interior or fixed end spans 1.00b Second span from supported end or unsupported fitting0.80c+d Sum of unsupported spans at fitting ≤0.75*eSimple supported end span0.67*For example: If continuous support is 10 ft., c+d must not exceed 7.5 ft. (c=3 ft. and d=4.5ft.) would satisfy this condition.Adjustment Factors for Various Spans With Supported Fitting at Change in DirectionSpan TypeFactor a Continuous interior or fixed end spans 1.00b Second span from simple supported end or unsupported fitting 0.80eSimple supported end span0.67Elbow StrengthAllowable Bending Moment - 90° ElbowNominal Pipe Size (In)Allowable Moment (Ft•Lbs)Nominal Pipe Size (In)Allowable Moment (Ft•Lbs)110061,6501½15082,8502225104,5003475126,50046501410,000Thermal ExpansionThe effects of thermal gradients on piping systems may be significant and should be considered in every piping system stress analysis. Pipe line movements due to thermal expansion or contraction may cause high stresses or even buckle a pipe line if improperly restrained. Several piping system designs are used to manage thermal expansion and contraction in above ground piping systems. They are listed below according to economic preference:1. Use of inherent flexibility in directional changes2. Restraining axial movements and guiding to prevent buckling3. Use expansion loops to absorb thermal movements4. Use mechanical expansion joints to absorb thermal movementsTo perform a thermal analysis the following information is required:1. Isometric layout of piping system 2. Physical and material properties of pipe 3. Design temperatures4. Installation temperature (final tie in temperature)5. Terminal equipment load limits6. Support movementsA comprehensive review of temperature effects on fiberglass pipe may be found in NOV Fiber Glass Systems’ Engineering and Piping Design Guide.Change in T emperature°FPipe Change in Length (In/100 Ft)250.3500.775 1.0100 1.3125 1.7150 2.0175 2.32002.6•***************ANSI/NSF 61 Drinking Water System Components 35GHWater Contact Temp: 23°CNational Oilwell Varco has produced this brochure for general information only, and itis not intended for design purposes. Although every effort has been made to maintainthe accuracy and reliability of its contents, National Oilwell Varco in no way assumesresponsibility for liability for any loss, damage or injury resulting from the use of informationand data herein nor is any warranty expressed or implied. Always cross-reference thebulletin date with the most current version listed at the web site noted in this literature.North America South America Europe Asia Pacific Middle East17115 San Pedro Ave. Suite 200 Avenida Fernando Simoes P.O. Box 6, 4190 CA No. 7A, Tuas Avenue 3 P.O. Box 17324San Antonio, Texas 78232 USA Recife, Brazil 51020-390 Geldermalsen, The Netherlands Jurong, Singapore 639407 Dubai, UAE Phone: 210 477 7500 Phone: 55 31 3501 0023 Phone: 31 345 587 587 Phone: 65 6861 6118 Phone: 971 4881 3566。
仪器设备配

512007
LQ-T150D 10L QYL32
最大脱模长度:230mm; 脱膜速度:70mm/分 出水量:10L/小时
32T
最大载荷:400kN
501
FIU-40 150mm
150mm ф100mm/200mm 100kN
±2mm
208# 1066 405 1070
TP-1型 100KN
±1% ±1% ±1% ±1%
2.549Kg ±2.5Kg ±0.1mm ±0.1mm
CSS-88100 100KN时≤±0.5% LX-A 0~2.5mm 0.01mm
YG(B)141D 0-10mm YT020 YT030 DZY-III
重型:4.5kg;高度450mm.轻 型:2.5kg;高度300mm.锤击 速度30次/分
4359 0065
TW-05 TL-02C型
500g 200g
7级 7级
TG2003 TG2004 TG2005 TG2006 TG2007 TG2008 TG2009 TG2010 TG2011 TG2012 TG2013 TG2015 TG2016 TG2017 TG2018 TG2019 TG2020 TG2022 TG2023 TG2024 TG2025 TG2026 TG2027 TG2028 TG2029 TG2030 JC1001 JC1002 JC1003 JC1004 JC1005
03 0114
ቤተ መጻሕፍቲ ባይዱ
ys-1 TL-02C WS-55 WZ-1 SS-1
1200Kg 200g 耐压:200Kpa 环刀规格:φ 58*25 环刀规格:φ 61.8*20 0.6KN~1.2KN 0-22mm 0-22mm 锤质量:2.5kg 落高:305mm 锤质量:2.5kg 落高:305mm 锤质量:2.5kg 落高:305mm 锤质量:1.25kg± 5g
Zenith25 GNSS Series 安装指南说明书
Zenith25 SeriesInstallation GuideVersion 2.1EnglishTablet of Contents1I NTRODUCTION (3)2G ENERAL P REPARATION (4)2.1Copy Zenith25 Firmware on MicroSD card (4)2.2Battery Charging (4)2.2.1Zenith25 receiver 42.2.2Getac PS336 handheld 4 3P REPARATION OF THE GNSS RECEIVER (5)3.1Connecting to the PC (5)3.2Receiver connection with GeoMax Assistant (6)3.3Checking the receiver firmware version (6)3.4Changing the UHF radio settings (7)3.5Installation of licences (8)3.6Disconnecting from the PC (8)4P REPARATION OF THE H ANDHELD (9)4.1S ETTING UP W INDOWS M OBILE (9)4.2Connecting to the PC (9)4.3Installation of FieldGenius/ Layout Pro (10)4.4Registration of FieldGenius/ Layout Pro (10)4.5Connection to the GNSS receiver (12)5E QUIPMENT SETUP (15)5.1Rover setup (15)5.2Base setup (16)1I NTRODUCTIONThis guide provides complete step-by-step instructions for preparing the Zenith25 GNSS series for measuring work. The instructions cover all the required installation tasks for the Zenith GNSS receiver, Getac PS336 handheld and FieldGenius/ Layout Pro software.Only the tasks required for the initial setup of a new Zenith10/20 system are described in this document. For further information regarding the operation of the Zenith10/20 components, please refer to the respective User Manuals.The User Manual for the GNSS receiver is available from the Zenith10/20 CD and also from the GeoMax Partner Area. The Getac PS336 User Manual can be downloaded from Getac’s website, at /support/downloads.html.2G ENERAL P REPARATION2.1C OPY Z ENITH25F IRMWARE ON M ICRO SD CARDVisit GeoMax Downloads to check for the current versions of both System and GNSS firmwares. Download the files and store them on the provided MicroSD card in the SYSTEM folder2.2B ATTERY C HARGING2.2.1Zenith25 receiverBefore using the receiver, the included ZBA201 batteries should be charged. Insert a battery into the ZCH201 charger and plug the adapter into an AC supply. Do not disconnect from power until the green FULL indicator flashes, indicating that the battery is fully charged.2.2.2Getac PS336 handheldThe PS336 handheld is supplied in a cardboard box which includes the handheld device, battery, charging adapter and EU power cable. A suitable AC power cable may need to be sourced locally to suit country specific plugs. All AC voltages are supported by the adapter. Insert the supplied battery into the handheld’s battery compartment. Charge the internal battery with the supplied adapter as shown below. While charging, the circled indicator on the front of the PS336 glows amber. Do not disconnect from power until the indicator glows green, indicating that the battery is fully charged.3P REPARATION OF THE GNSS RECEIVER3.1C ONNECTING TO THE PCLocate the Serial-to-USB cable in the yellow container. Insert a fully charged battery into the GNSS receiver and switch it on. Connect the cable to the Lemo port of the receiver. When connecting the cable to a USB port of the PC, the cable drivers will automatically be installed. If the Windows Found New Hardware Wizard starts, click the Close button.Download the USB cable driver installer CP210xVCPInstaller_x86.exe from GeoMax Downloads. For 64-bit versions of Windows use the installer named CP210xVCPInstaller_x64.exe. Run this file to install the USB port to Serial converter software by following the instructions of the Windows installer wizard.3.2R ECEIVER CONNECTION WITH G EO M AX A SSISTANTInstallation of GeoMax AssistantLocate the GeoMax Assistant software from Geomax Downloads in the Zenith25 folder and save to your PC. Run GeomaxAssistantZenith.exe and following the instructions of the Windows installer wizard.The installation of the USB cable driver converted the USB port of your PC to a Serial type. The assigned COM port number can be checked on the PC by selecting START Control Panel Device Manager. In the Ports (COM & LPT) category, look for Silicon Labs CP210x USB to UART Bridge. Here the COM port number of the USB port is provided, as shown in the example below (COM5). Please remember the displayed COM port assigned to your receiver.With the receiver connected to the PC, launch Assistant by clicking the respective icon in your Windows desktop. From the menu bar, select File…Connect and choose the COM port number as defined in Device Manager. The COM Port defaults are Baudrate 115`200, 8 databits, 1 Stopbit, Parity None.3.3C HECKING THE RECEIVER FIRMWARE VERSIONBefore using the receiver, it should be checked that the loaded firmwares are the latest versions. Once connected with Assistant, the installed firmwares can be seen when selecting Information from the side menu.If the firmware is older as the one downloaded from the GeoMax download Area it is recommended to perform an update. To update the receiver firmware, download therespective *.FW files, copy to the SYSTEM directory on a microSD card and insert it into the Zenith25 receiver. Select Sensor Firmware from the side menu. The contents of the SYSTEM directory are displayed. Choose the required file and click Upgrade to install the firmware onto the receiver.The upgrade takes a while. After the upgrade the receiver switches on and off automatically. Once this is done a message will be shown on the Zenith25 status panel, that the instrument is connected successfully. To check whether the latest version has been successfully installed, select Information on the righ sidebar. The new firmware version should be displayed in the info panel.3.4C HANGING THE UHF RADIO SETTINGSTo meet country radio licence requirements, the internal UHF radio must be set before use to legally allowed local frequencies as defined by local or governmental authorities. Use of forbidden frequencies may lead to prosecution and penalties.The following procedure defines the configuration of the internal UHF radio. With the receiver connected to Assistant, select Radio Settings from the side menu. The Internal Radio window is now displayed where up to 15 different frequencies can be set. A choice of required frequencies can be entered into the channel table. Check with your country specific local authorities, what frequencies and channel spacing may be used. At the Radio Settings field the internal radio can be configured with default channel, protocol type, channel spacing, transmission power and identifying number. Click Upload Settings to update the defined radio configuration onto the receiver.3.5I NSTALLATION OF LICENCESIf optional receiver licenses such as 20Hz output frequency were additionally ordered, they are not activated before delivery. Therefore when the equipment is first received, the licences still need to be installed onto the receiver. These options are activated by means of a NovAtel licence key file that would have been emailed to you at delivery of the Zenith25.The licence key file can be installed onto the receiver by using GeoMax Assistant. With the receiver connected to Assistant, select Upload Key from the side menu. Select the key file (for example L_xxx.key where xxx is the receiver serial number) and click Upload. A confirmation message will be shown once the option has been activated.Note:The microSD card must be in the receiver when uploading the key file.A manual entry of the license key is NOT supported. The files must be uploaded!3.6D ISCONNECTING FROM THE PCOnce the receiver is completely configured, it can be disconnected from the PC. From the Assistant menu bar, select File…Disconnect. The USB cable may now be removed and the Zenith25 is ready for use.4 P REPARATION OF THE H ANDHELD4.1 S ETTING UP W INDOWS M OBILEOnce the battery is fully charged or while connected to AC power, press the power button of the handheld. Follow the steps of the wizard to setup Windows Mobile. The Windows Mobile software on the supplied Getac PS236 is only available in English language. Microsoft restricts the installation of alternative languages with this operating system.4.2 C ONNECTING TO THE PCTo establish communication between thehandheld and your PC, the Windows Mobile Device Centre needs to be installed. For Windows XP the communication software Microsoft ActiveSync is required. These softwares can be downloaded from Microsoft’s website. After the software installation, connect the handheld to your PC with the USB cable supplied with the Getac as shown below.The device drivers will now automatically be installed. If the Windows Found New Hardware Wizard starts, click the Close button. After the drivers are installed, the Mobile Device Centre or ActiveSync will automatically start. The contents of the PS236 internal memory can be seen with Windows Explorer and are defined as a drive named Portable Device .4.3I NSTALLATION OF F IELD G ENIUS/L AYOUT P RODownload the latest version of GeoMax FieldGenius/Layout Pro from from GeoMax Website at /Downloads.htm?cid=15613Here the latest installation version and Release Notes of FieldGenius/Layout Pro is available. Download the Devices Installation and save onto your PC.With the handheld connected to your PC, run the installer file fieldgenius-devices-v.v.v.v-xxu.exe where v.v.v.v is the version number and xx the language. The PC will attempt to connect to the handheld and install the FieldGenius/ Layout Pro software. Follow the instructions of the Windows installation wizard. At the Device Selection window, select the data collector type as Windows Mobile 6.When prompted by the handheld for where to install, choose Device. Once the installation process is completed, the FieldGenius/ Layout Pro software can be started by selecting it from the Windows Mobile Start Menu.4.4R EGISTRATION OF F IELD G ENIUS/L AYOUT P ROWhen FieldGenius/Layout Pro is started, a registration window with the Device ID is displayed as shown below. It is possible to use FieldGenius/Layout Pro without registration by tapping Run Demo Mode. This provides full functionality, but is limited to the storage of 30 points.To register your version of FieldGenius/ Layout Pro, an activation key needs to be entered. The displayed Device ID together with the GUID (G lobal U nique ID entity) is used to obtain the key. The GUID can be found on the printed FieldGenius/ Layout Pro card that was supplied together with your Zenith25 equipment.The activation key can be generated by using MicroSurvey’s webportal, at the link /ValidateSerialNumber.aspx. This webportal is shown in the screenshot below. At the blank serial number field, enter your GUID and click Submit. At the next screen, enter the Device ID shown on the handheld. The activation key will then be displayed in the password field. Enter this key into the handheld at the provided fields and click Apply Key.Note:Please make certain that the Device ID is entered correctly first time, since an activation key cannot be generated again with a different ID.4.5C ONNECTION TO THE GNSS RECEIVERWhen starting FieldGenius, the Project Manager screen is displayed each time. Create a new project by tapping the appropriate icon and enter a project name. The onscreen keyboard can always be accessed by double tapping on the editable field. The screens that follow are used to set the default settings for this project.At the Instrument Selection screen that follows, a connection to the receiver can be made. Ensure that the receiver is switched on and select either GPS Rover or GPS Reference. In the Instrument Profile window, tap Add and enter a name for your receiver. Save the name and then tap Edit to configure the profile.To ensure that measured heights are computed correctly, it is important to define the receiver type. At the Antenna Height panel, choose the Model as Zenith25. The Measured Height is the default length of the telescopic pole.At the Model & Communication panel, select the Make as GeoMax, Model as Zenith25 and Port as Bluetooth. Tap Bluetooth Search to find all available devices and choose the required receiver by its serial number. Once a connection has been made, you will be prompted for a PIN which is 0000.The Link Configure panel is displayed next. In the Link Device field, the following choices are available:- Other Device: When connecting an external radio by cable- GSM Module: For network rover using the internal GSM- Microhard nL400:When using the internal radio with base or rover mode- Data Collector Internet: To receive RTK data using the PS236 3G handheldSet the Data Format with the required RTK base message type. When selecting GSMModule or Data Collector Internet, tap Setup to define the NTRIP parameters. Once aninternet connection is established, a suitable mountpoint can be selected.When everything has been configured as required, tap Connect. The map view is shownnext and you are ready to measure. For further information on using FieldGenius/ LayoutPro for GNSS measurements, refer to the FieldGenius/ Layout Pro instruction manual inthe GPS REFERENCE chapter.5E QUIPMENT SETUP5.1R OVER SETUPFor a RTK rover, the Zenith25 equipment can be setup on a pole as shown below.To use as a network rover, a SIM card needs be inserted into the slot located in the battery compartment.Note: The PIN must be disabled before using the SIM card.When working with the UHF radio, ensure the correct frequency and protocol are set as described in section 3.5. Attach a radio antenna suitable for the set frequency. The following UHF antennas can be ordered from GeoMax:5.2B ASE SETUPThe Zenith25 equipment can also be setup as a base station for the transmission of RTK corrections as shown below.Attach the UHF radio antenna to the 760275 ZAR200 antenna arm. The arm has a 5/8” thread for mounting onto a telescopic pole or a tripod setup with threaded carrier. The antenna is connected to the Zenith25 using the 760266 ZDC202 cable. The required RTK output message can be configured using GeoMax Assistant or FieldGenius.For long range RTK, a high powered radio can be used at the base station. Available from GeoMax is the 789359 Satel EASyPro 35W radio. This radio is connected to the receiver and an external power supply, with the 797024 ZDC225 cable. The cable needs to be connected to the Lemo port of the receiver. When other UHF radio types are used, a suitable cable needs to be obtained from the respective radio supplier.。
Magnetotransport of CeRhIn5

Magnetotransport of CeRhIn5A.D. Christianson, A.H. LacerdaNational High Magnetic Field Laboratory, Los Alamos National Laboratory,Los Alamos, NM 87545, USAM.F. Hundley, P.G. Pagliuso, and J.L. SarraoCondensed Matter and Thermal Physics Group, Los Alamos National Laboratory,Los Alamos, NM 87545, USAAbstractWe report measurements of the temperature-dependent anisotropic resistivity and in-plane magnetoresistance on single crystals of the tetragonal heavy-fermion antiferromagnet (T N = 3.8 K) CeRhIn5. The measurements are reported in the temperature range 1.4 K to 300 K and in magnetic fields to 18 tesla. The resistivity is moderately anisotropic, with a room-temperature c-axis to in-plane resistivity ratio ρc/ρa(300 K) = 1.7. ρ(T) measurements on the non-magnetic analog LaRhIn5 indicate that the anisotropy in the CeRhIn5 resistivity stems predominately from anisotropy in Kondo-derived magnetic scattering. In the magnetically ordered regime an applied field H reduces T N only slightly due to the small ordered moment (0.37µB) and magnetic anisotropy. The magnetoresistance (MR) below T N is positive and varies linearly with H. In the paramagnetic state a positive MR is present below 7.5 K, while a high-field negative contribution is evident at higher temperatures. The positive contribution decreases in magnitude with increasing temperature. Above 40 K the positive contribution is no longer observable, and the MR is negative. The low-T positive MR results from interactions with the Kondo-coherent state, while the high-T negative MR stems from single-impurity effects. The H and T-dependent magnetotransport reflects the magnetic anisotropy and Kondo interactions at play in CeRhIn5. PACS number(s) 74.70.Tx, 71.27.+a, 75.40.Cx Submitted to Phys. Rev. BI. IntroductionTransport measurements in large applied magnetic fields provide an exceptionally useful means of probing the electronic and thermodynamic properties of heavy fermion compounds. This stems from the magnetic origin of the interactions responsible for the mass-enhanced ground state.1 As such, the resistivity of a heavy fermion system is altered by an applied magnetic field in fundamentally different ways when the compound is in a magnetically ordered, Kondo-coherent or single-impurity regime. Field-dependent measurements can also provide information regarding the importance of magnetic fluctuations and the proximity to low-temperature magnetic instabilities in the coherent regime. Although no complete microscopic theory is available to fully model the transport and thermodynamic properties of a heavy fermion system, a number of theoretical treatments are available that qualitatively describe the key features of a system’s field-dependent behavior.2,3 From the experimental point of view, a wide range of phenomena can be observed when applying a magnetic field at low temperature.4 Among archetype heavy fermion compounds, UPt3 and CeRu2Si2 exhibit highly anisotropic magnetotransport behavior and remarkable field-induced metamagnetic transitions at 20 T,5,6 and 8 T,7 respectively, while UBe13, exhibits negative magnetoresistance above its superconducting transition temperature.8 Ultimately, a heavy fermion system’s field-dependent properties are determined by RKKY and Kondo interactions,9 with the relative importance of these two interactions influenced by magnetic and structural anisotropies.A new family of Ce-based heavy fermions was recently discovered that exhibits a complex phase diagram that challenges our understanding of correlated electron physics.10,11 This family has a generalized chemical formula, Ce m M n In3m+2n, where M is Rh, Ir, or Co. All compounds investigated to-date (m = 1, 2 and n = 1), except cubic CeIn3, crystallize in atetragonal structure (space group P4/mmm).12 The most notable properties in this series of compounds include ambient-pressure magnetic order (T N = 3.8 K) and pressure-induced superconductivity (T c = 2.1 K at 16 kbar pressure) in CeRhIn5,10,13,14 and unconventional15 ambient-pressure superconductivity in both CeIrIn5 (T c = 0.4 K)16 and CeCoIn5 (T c = 2.3 K);17 the transition temperature for CeCoIn5 is the highest ambient-pressure T c reported to date for a heavy fermion superconductor. This new family of compounds offers the opportunity to explore the importance of tuned dimensionality on magnetic, Kondo, and superconducting groundstates.CeRhIn5 has attracted considerable attention due to its unusual pressure-temperature phase diagram.10 Ce heavy fermion systems that order antiferromagnetically typically exhibit a P-T phase diagram wherein applied pressure acts to smoothly reduce the Neel temperature T N to zero at a critical pressure P c, with superconductivity occurring over a range of pressure centered at P c. The P-T phase diagram of the cubic member of the Ce m M n In3m+2n family (CeIn3) displays this behavior, with an ambient-pressure ordering temperature T N = 10 K, a slightly enhanced Sommerfeld coefficient of 100 mJ/mole-K2, and a critical pressure P C = 23 kbar.18,19 The CeRhIn5 P-T phase diagram is quite different. At ambient pressure, CeRhIn5 orders antiferromagnetically at 3.8 K. Applied hydrostatic pressure acts to very slightly increase T N until magnetic order becomes unobservable near 16 kbar, at which point superconductivity appears at 2.1 K.10 Specific heat measurements indicate an enhanced Sommerfeld coefficient of roughly 420 mJ/mole-K2 below 10 K;10 for a single impurity system,20 this corresponds to a Kondo temperature of roughly 10 K. CeRhIn5 has a quasi-2D structure that is composed of alternating layers of the cubic heavy fermion antiferromagnet CeIn3 and a transition-metal layer composed of RhIn2. As such, dimensionality may play a role in the interactions that produces the unusual P-T phase diagram exhibited by CeRhIn5. This is born out by nuclear quadrupolarresonance21 and neutron scatting measurements22 which indicate that the magnetic moments lie in the basal plane of the tetragonal structure with a spiral along the c-axis, with a reduced magnetic moment of 0.37 Bohr magnetons (µB). However, recent inelastic neutron scattering experiments indicate some degree of 3-dimensional behavior for CeRhIn5.23 Clearly, further measurements are needed to fully elucidate the influence of dimensionality on the physical properties of CeRhIn5.In order to enhance our understanding of the ground state properties of CeRhIn5, we have measured the anisotropic resistivity of this compound as a function of magnetic field and temperature. The resistivity is moderately anisotropic, with a room-temperature c-axis to in-plane resistivity ratio ρc/ρa of 1.7. This ratio changes markedly with decreasing temperature, and at 4 K the in-plane resistivity is larger than the out-of-plane resistivity by 80%. The antiferromagnetic transition at 3.8 K produces an inflection point in ρ. With application of magnetic field, the transition moves to slightly lower temperatures, with a field-dependence that depends upon the direction of the applied field. The magnetoresistance (MR) also depends significantly upon the direction of the applied field. The MR is positive in the magnetically ordered state and varies linearly with applied field. At moderate temperatures, we observe positive contribution to the MR that is characteristic of a Kondo system in the coherent regime. At higher temperature, this positive MR gives way to a negative contribution characteristic of a single impurity Kondo system.II.Experimental detailsSingle crystals of CeRhIn5 were grown from an In flux method24 as described previously.12 The deleterious influence of residual In flux on low-T transport measurements (thesuperconducting transition for In occurs at 3.4 K) necessitates careful sample surface polishing to remove any possible In contamination. The polished single crystal samples were orientated by using Laue x-ray diffraction to determine the crystallographic in-plane (a-axis) and out-of-plane (c-axis) directions. Finally, the resistance of each sample that was slated for use in MR measurements was measured down to 2 K to ensure that no extrinsic superconductivity contamination was evident at 3.4 K due to surface In. The samples that passed this screening process had residual resistivity ratios [RRR = ρ(300 K)/ρ(4 K) ≈ 100] that were similar to those reported previously.25All resistivity measurements reported here were made with a conventional four-probe sample configuration in which silver conductive paint or epoxy was used to make sample contacts. Sample resistances were measured with a low-frequency ac bridge. The in-plane and out-of-plane resistivities were determined on oriented samples via the Montgomery and anisotropic van der Pauw methods.26 The transverse magnetoresistance was measured with current applied along an a-axis, and the applied field oriented perpendicular to the measurement current (i.e., either in the other a-axis or along the c axis). The transport measurements were carried out in a variable flow cryostat capable of temperatures from 1.4 K to 325 K. To avoid magnetoresistance effects in the Cernox thermometer used to determine and control sample temperature, temperatures below 3 K were stabilized by controlling the 4He vapor pressure.III. ResultsThe temperature-dependent resistivities of CeRhIn5 and LaRhIn5 in, and perpendicular to, the basal plane, are shown in Fig. 1a. The data for CeRhIn5 indicate that this compound is moderately anisotropic; ρc is roughly 70% larger than ρa at room temperature. Below 325 K theresistivity falls with decreasing temperature in both directions, and both ρa and ρc exhibit shoulder-like features between 50 and 100 K. Both resistivities fall-off more rapidly at lower temperatures. ρa and ρc cross at 30 K, and the a-axis resistivity is larger than the c-axis resistivity down to 1 K. In comparison, the resistivity of LaRhIn 5 (the non-magnetic analog of CeRhIn 5)varies linearly with temperature below 300 K, and saturates to a value near 1 µΩ cm below 20 K.The LaRhIn 5 c-axis resistivity is greater than the in-plane resistivity at all temperatures, and the anisotropy ratio ρc /ρa is nearly T-independent. The 300 K anisotropy ratio ρc /ρa = 1.2 for LaRhIn 5 suggests that the non-magnetic electronic anisotropy inherent to the RMIn 5 structure is relatively small.The temperature-dependent magnetic scattering component (ρmag = ρCe – ρLa ) of the CeRhIn 5 in-plane and c-axis resistivities are presented in Fig. 1b. After removing the electron-phonon scattering contribution to ρCe , the magnetic resistivity in both crystallographic directions varies as ρ ∝ -ln(T) at high temperatures and drops sharply below 50 K; this T-dependence is characteristic of Kondo lattice compounds.1 The resistivity in the vicinity of the 3.8 K AFM transition is shown in the inset to Fig. 1b. A clear change in magnetic scattering is evident inboth ρa and ρc near T N . The transport anisotropy ratio ρρamag c mag /is plotted as a function of temperature in Fig. 2. Near room temperature the magnetic resistivity is moderately anisotropic (ρρa mag c mag / at 300 K is 0.6), and the ratio exhibits a gradual evolution from a high-T regimewhere ρρa mag c mag / < 1 to a low-T regime where ρρa mag c mag / > 1. The magnetic resistivities cross at 30 K. ρc mag is smaller than ρa mag down to the lowest measurement temperature (1.4 K), andthere is no evidence for any change in ρρamag c mag / at or below T N .We now turn to an examination of the influence of applied magnetic fields on the T-dependent in-plane resistivity. The resistivity as a function of temperature in a field of 18 tesla is displayed in Fig. 3, and compared to the zero-field ρa data. In Fig. 3a the magnetic field is applied parallel to the basal plane and perpendicular to the current. A positive MR is evident at low temperatures, with the magnitude of the effect diminishing with increasing temperature. Above roughly 50 K, no difference is discernable between ρ(H = 0) and ρ(18 T). The inset to Fig. 3a shows ρ(T) in fields of 0, 10, 15, and 18 T in the vicinity of T N; in this temperature regime the applied fields appear to uniformly increase the resistivity below 4 K. The H-dependent AFM ordering temperature can be determined by finding the location of the inflection point in ρ that marks T N. The arrows in the inset denote T N(H). The transition moves downward monotonically with temperature; in 18 T the inflection point occurs at 3.35 K, corresponding to the rate dT N/dH|| = -25 mk/T. The a-axis resistivity for a field applied parallel to the c-axis is shown in Fig. 3b. In this field orientation, the low-T magnetoresistance is also positive, but the 18 T MR crosses zero at 16 K, and becomes large and negative at higher temperatures. This negative MR effect reaches a maximum value nearly 30 K. At higher temperatures the negative MR diminishes in magnitude, approaching zero at 100 K. The inset to Fig. 3b depicts ρ(T) in fields of 0, 5, 10, 15, and 18 T in the vicinity of T N; as with the in-plane field orientation, the applied field uniformly increases ρa below 5 K. The field also decreases the AFM transition temperature, but at a faster rate than for fields oriented in the basal plan. In 18 T the applied field drops T N to 3.0 K; this corresponding to a rate dT N/dH⊥ = -35 mk/T, a value that is in good agreement with independent rate measurements from heat-capacity.27,32The field-dependent in-plane magnetoresistance ∆ρa(H) =ρa(H) - ρa(H=0) at constant temperature is depicted in Figures 4 (H || a) and 5 (H || c) for CeRhIn5. With the field applied inthe basal plane the MR below 10 K (Fig. 4a) exhibits two distinct regimes. At 1.4 K the ∆ρa(H) varies linearly with H throughout the measured field range (H ≤ 18 T), while for T > T N the MR grows in magnitude and exhibits some curvature below 5 T. At 7.5 K the MR varies as H1/2 above 1 tesla, and it saturates above 15 T. At still higher temperatures (Fig. 4b) ∆ρa(H) displays a maximum at a field H max that occurs near 12 tesla. The rise in the MR at low fields is suppressed as the temperature is increased, and the overall magnitude of the magnetoresistance diminishes as well. The relative magnetoresistance in 18 tesla, defined as [ρa(H) - ρa(H=0)]/ρa(H=0), is plotted as a function of temperature in the inset to Fig. 4a. The relative MR is nearly zero above 20 K, and grows markedly below 10 K in large measure due to the sharp drop in ρa(T, H = 0) that stems from the onset of coherence. In contrast, the magnetoresistance of the non-magnetic analog LaRhIn5 displaying a standard metal-like positive MR that varies as H2 and diminishes in magnitude with increasing temperature.The in-plane magnetoresistance of CeRhIn5 with H applied along the c axis is depicted in Fig. 5. For T ≤ 7.5 K (Fig. 5a) the results are qualitatively similar to those for H || a. Below T N ∆ρa(H) grows linearly with H, and a small change in slope is evident near 2.5 T. Above T N the high-field MR grows as Hα with α < 1. At 7.5 K ∆ρa(H) varies as H1/2 throughout the measured field range and it is approaching saturation at 18 T. For T ≥ 7.5 K (Fig. 5b) the MR is quite different from the low-T behavior. The H1/2 behavior present at 7.5 K evolves into a peak in ∆ρa(H) at 10 K that occurs between 5 and 10 T, and the MR decreases markedly at still higher fields. Above 20 K, the low-H positive MR is no longer in evidence and the negative MR contribution predominates. The MR is negative above 30 K at all fields, and the overall magnitude of the negative MR decreases with increasing temperature.Taken as a whole, the temperature and magnetic-field dependent ρa data presented in Figs. 3-5 suggest that there are three field-dependent transport regimes in CeRhIn5. The first, in the magnetically ordered state, exhibits a nearly linear-in-H MR that does not show any sign of field saturation at 18 T (we note that at least 40 T is required to field-polarize the AFM state).28 The second regime resides in the paramagnetic state just above T N. In this regime the MR is positive and exhibits a tendency to saturate near 20 tesla. The third regime occurs at temperatures above 10 K and at high fields where a negative MR contribution comes into play that initially produces a maximum in ∆ρa(H). At still higher temperatures the positive MR disappears and the negative contribution dominates the field-dependent transport. Magnetic anisotropy influences the detailed nature of the field-dependent transport. The influence of the high-T negative MR contribution is largest with the field applied perpendicular to the basal plane. As such, the peak field H max is largest with the field applied in the basal plane, and the MR is more negative for H || c.IV.DiscussionThe anisotropy in the zero-field resistivity data, and the complex magnetic-field and temperature dependence of the a-axis magnetoresistance are the most prominent features of these CeRhIn5 magnetotransport data. How do these features reflect the tetragonal crystal structure, the Kondo and crystal-field interactions, and the RKKY-mediate antiferromagnetic order? Before answering these questions, we first must examine the influence that lattice anisotropy has on the electronic and magnetic structure in the CeRhIn5.The CeRhIn5 unit cell is composed of cubic CeIn3 building-blocks that are separated by RhIn2 layers. Full-potential band structure calculations29 indicate that the electronic structure ofCeRhIn5 and LaRhIn5 reflects the quasi-2D nature of the tetragonal unit cell. The band structure exhibits a number of bands that cross the fermi energy E f, producing three fermi surfaces. Only the first, containing hole-like orbits, is relatively isotropic. Reflecting CeRhIn5’s planar structure, the second and third surfaces are composed of corrugated cylindrical electron- and hole-like orbits that extend along the c axis. de Haas-van Alphen (dHvA) measurements detect extremal orbits that are consistent with the band-structure calculations.25,29 In addition, the Hall effect in both CeRhIn5 and LaRhIn5 is anisotropic and strongly temperature dependent,30 providing clear evidence for competing electron and hole carriers. The fact that the Hall effect in CeRhIn5 and LaRhIn5 are quite similar indicates that they share the same anisotropic electronic structure, and that the f-electrons in CeRhIn5 are localized.31 Hence, based both on measurements and calculations, the layered structure of CeRhIn5 is reflected in the compound’s complex electronic structure.The magnetic structure of the antiferromagnetic ground state also reflects CeRhIn5’s layered nature. The magnetic moments that order at T N = 10 K in CeIn3 are commensurate with the cubic lattice.19 In contrast, the magnetic moments in CeRhIn5 are found to lie completely within the basal plane, and they form an incommensurate spiral along the c-axis.21,22 Field-dependent specific-heat32 and dHvA25 measurements indicate that fields oriented along the c-axis gradually reduce the ordering temperature without altering this incommensurate structure. Fields applied within the basal plane strongly influence the magnetic structure, producing a complex H-T phase diagram. 28,32,33 Below 3 K a field of 2 tesla transforms the magnetic structure to one that is commensurate with the lattice, while a third state is also present near 3.5 K. The onset ordering temperature is much less field-dependent than for H || c. In the paramagnetic regime the magnetic susceptibility χ exhibits a factor-of-two anisotropy between χa and χc.10 This anisotropy stemsfrom the splitting of the J = 5/2 manifold under the influence of tetragonal crystalline electric fields. The crystal field level scheme that describes χa(T) and χc(T) in the paramagnetic state34 includes a Γ7 doublet groundstate (composed predominately of the |±5/2〉 spin state), a first-excited Γ7 doublet (predominately |±3/2〉) at 6 meV, and the last state, a spin-½ Γ6 doublet, located 13 meV above the Γ7 groundstate. This level scheme is also consistent with preliminary inelastic neutron scattering results that find a broad crystal-field feature at an energy of 6 to 7 meV corresponding to transitions amongst these three levels.35 Armed with this information concerning CeRhIn5’s electronic and magnetic structures, as well as the crystal-level scheme, we can now examine the underlying mechanisms responsible for the magnetotransport features exhibited by CeRhIn5.The modest transport anisotropy exhibited by LaRhIn5(ρc/ρa≈ 1.2) indicates that the quasi-2D electronic structure does not translate into transport anisotropy. Conventional electron-phonon scattering also appears to be weakly influenced by the planar 115 structure as well. The absence of significant anisotropy in the resistivity of LaRhIn5 indicates that the anisotropy in the CeRhIn5 resistivity stems from magnetic scattering. Both the a-axis and c-axis magnetic resistivities of CeRhIn5 display temperature-dependencies that are characteristic of a Kondo-lattice compound. The complex T-dependent anisotropy between the a and c axis magnetic resistivities is reminiscent of that seen in many other heavy-electron systems. For example, The a-axis and c-axis resistivities in the tetragonal compounds CeRu2Si2 and CeNi2Ge2 also cross in a manner reminiscent of CeRhIn5.36,37 There are also a number of other f-electron compounds that exhibit an anisotropic ρmag but without any crossing of the ρa and ρc resistivities. Systems that fall into this second class include the hexagonal compound UPt3,38 orthorhombic CeCu6,39 and the tetragonal compounds CePt2Si2,40 CePd2Si2,41 and CeCu2Si2.42As with CeRhIn5, ρa and ρcnever differ by more than a factor of 2 in these systems. These resistivity anisotropies can be explained by considering the nature of the scattering relaxation rates that are produced when resonant Kondo scattering is influenced by anisotropic crystal-field levels.43,44 This modeling describes successfully the anisotropy evidenced by a wide variety of Ce compounds.40,43,44,45 As such, it seems reasonable to conclude that the magnetic resistivity anisotropy in CeRhIn5 is a reflection of anisotropic carrier scattering due to the influence of the crystal fields.The influence of an applied magnetic field on the resistivity in the vicinity of the antiferromagnetic transition is depicted in the insets to Figs. 3a and 3b. The zero-field AFM order at T N = 3.8 K gives rise to an inflection point in the resistivity, indicating that magnetic order alters the transport in at most a modest way. The absence of any abrupt change in the ratio ρa/ρc at T N indicates that the onset of magnetic order influences spin-wave scattering isotropically; this is consistent with inelastic neutron scattering measurements23 which indicate that there is no 3-D to 2-D crossover prior the onset of long-range order and that the magnetic system is predominately three-dimensional. Specific-heat32 measurements show that a magnetic field applied in the basal plane will split the antiferromagnetic transitions into three separate transitions. Preliminary neutron-diffraction measurements33 indicate that these transitions are associated with an evolution in the zero-field magnetic structure. No such splitting of the antiferromagnetic transition signature is evident in the resistivity data shown in the Fig. 3a inset. This may be due to the relatively small change in carrier scattering that will occur when the system is transformed from one magnetic structure to the next, and as such the resistivity inflection points for the separate transitions may be indistinguishable. However, the inflection point, as indicated by the arrows in the inset, decreases very gradually (dT N/dH|| = -25 mk/T) with magnetic field. Specific-heat measurements27,32 with the magnetic field applied along the caxis indicate that while the field does not alter the magnetic structure it does have a stronger influence on T N; this is consistent with the more rapid field-induced decrease in the inflection-point temperature (dT N/dH⊥ = -35 mk/T) evident in the data displayed in the Fig. 3b inset.We now turn to the a-axis magnetoresistance in the paramagnetic state. The data reflect two field/temperature regimes. At low H and T the MR is positive, while at high H and T the MR exhibits a negative contribution. A low-temperature positive MR is a common feature of Kondo systems that are in, or are approaching, a coherent fermi-liquid state.3,46 A positive magnetoresistance has been reported in both CeAl3 [47,48] and CeRu2Si2 [49] at low temperatures, and in UBe13 under pressure.50 The positive MR appears to stem from the magnetic field’s interaction with the fermi liquid state.3 Field-dependent transport coefficient calculations for a Kondo-lattice model3 indicate that the applied field will act to smear out and shift the Abrikosov-Suhl resonance present in the electronic density of states. In essence, the applied field suppresses the Kondo effect by polarizing the local multiplet. For Ce compounds the Kondo resonance occurs just above the fermi energy E F. The model calculation indicate that an applied field shifts the resonance towards E F, and in so doing, increases N(E F). At a characteristic field H* = k B T K/µB the resonance is centered at E F; for still larger fields the resonance structure is smeared out, and progressively disappears. The field-induced increase in N(E F) for H < H* leads to enhanced s-f scattering and a positive magnetoresistance; the MR will reach a maximum at H*. Given a 10 K Kondo temperature for CeRhIn5 (estimated from the 420 mJ/mole-K2 Sommerfeld coefficient),10 the predicted characteristic field is roughly 15 tesla. This estimate is quite close to the characteristic fields observed for fields aligned within the basal plane (H a* ≈ 12 T) and along the c axis (H c* ≈ 8 T). Hence, the positive low-T MR effect appears to be a manifestation of field-induced destruction of Kondo coherence. In contrast, the negative MRoccurs in the single-impurity regime, where the zero-field resistivity varies logarithmically with temperature (dρ/dT < 0). In the single-impurity regime an applied field reduces incoherent Kondo scattering, producing a negative MR.51,52 In this regime the MR is known to scale with the induced magnetization M as ∆ρ/ρo∝ -M2.[52] Hence, a plot of ∆ρ/ρo(M) for all H and T should fall onto a single, universal curve. A careful analysis of the magnetoresistance data for all temperature that exhibit a hint of a negative MR is made problematic by the interaction between the low-H positive effect and the high-H negative contribution. Nonetheless, this single-impurity analysis is possible with H || c for T ≥ 40 K, as the MR shows no positive contribution in this temperature range. These data are plotted as a function of M2 in Fig. 7. The data scale as expected, falling on a common line and varying as M2. Hence, the negative high-temperature MR contribution appears to be a simple-impurity effect. At these temperature the applied field reduces incoherent Kondo scattering, giving rise to a negative MR. The detailed nature of the MR, and in particular the anisotropy evident in H* and the weaker negative contribution for H || a are an indication that the magnetic anisotropy evident in ρmag also influences the detailed balance between coherent and incoherent MR effects in CeRhIn5. As such, the temperature-dependent CeRhIn5 magnetotransport reflects the prevalent Kondo regime (coherent at low T, single-impurity at high-T) as well as the magnetic anisotropy stemming from the nature of the crystal-field levels.V. ConclusionsAnisotropy plays a critical role in determining the physical properties of CeRhIn5. Tetragonal crystalline electric fields split the J = 5/2 manifold into three doublets whose anisotropy influences both the magnetic susceptibility10 and the zero-field resistivity. The RhIn2。
VPN2525S
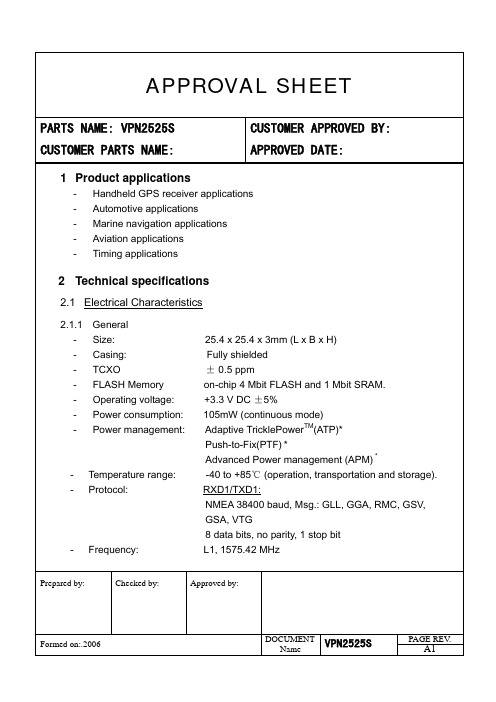
APPROVAL SHEETPARTS NAME: VPN2525S CUSTOMER PARTS NAME:CUSTOMER APPROVED BY: APPROVED DATE:1 Product applications- Handheld GPS receiver applications - Automotive applications- Marine navigation applications - Aviation applications - Timing applications2 Technical specifications2.1 Electrical Characteristics2.1.1 General- Size: 25.4 x 25.4 x 3mm (L x B x H) - Casing: Fully shielded - TCXO ± 0.5 ppm- FLASH Memory on-chip 4 Mbit FLASH and 1 Mbit SRAM. - Operating voltage: +3.3 V DC ±5% - Power consumption: 105mW (continuous mode) - Power management: Adaptive TricklePower TM (ATP)*Push-to-Fix(PTF) *Advanced Power management (APM) * - Temperature range: -40 to +85℃ (operation, transportation and storage). - Protocol: RXD1/TXD1:NMEA 38400 baud, Msg.: GLL, GGA, RMC, GSV, GSA, VTG8 data bits, no parity, 1 stop bit - Frequency: L1, 1575.42 MHzPrepared by:Checked by:Approved by:PAGE REV .Formed on:.2006DOCUMENTNameVPN2525SA1- C/A code: 1.023 MHz chip rate - Channels: 20 - Max. update rate: 1 Hz - Processor speed: 6, 12.5, 25 and 49 MHz - Data bus: 16 bit2.1.2 Accuracy- Position Autonomous: 10 meters CEP without SA SBAS: <5 meter - Velocity 0.1 meters/second, without SA - Time 1 microsecond synchronized to GPS time 2.1.3 DGPS Accuracy- Position 1 to 5 meter, typical - Velocity 0.05 meters/second, typical 2.1.4 Datum - WGS-842.1.5 Time to First Position- GSM <20 sec., average - 3G <20 sec., average - CDMA <16 sec., average - Hot start <18 sec., average - Hot start (open sky) <1 sec., average - Cold start <42 sec., average 2.1.6 Sensitivity *- GSM 15dBHz - 3G 15dBHz - CDMA 15dBHz - Tracking 13dBHz - Hot start 15dBHz - Cold start 30dBHzPrepared by: Checked by: Approved by:PAGE REV .Formed on:DOCUMENTNameVPN2525SA2*The sensitivity value is specified at the correlator. On a VPN2525S Evaluation Receiver using GSW3 firmware with the supplied antenna, 32 dBHz isequivalent to -159 dBm. Other board and antenna characteristics will vary.2.1.7 Dynamic Conditions- Altitude 18,000 meters (60,000 feet) max.- Velocity <515 meters/second (1000 knots) max.- Acceleration 4 g, max- Jerk 20 meters/second3, max2.1.8 DC Power- Main power + 3.3 V DC ±5%- Core power + 1.5 V DC- Continuous mode 55 mA at 3.3 V DC- Backup battery power +3 V DC ±5%2.1.9 Serial port- Electrical interface Two full duplex serial communication, CMOS.- Protocol messages SiRF binary and NMEA-0183 with a baud rateselection.SiRF binary – position, velocity, altitude, statusand control NMEA - GGA, GLL, GSA, GSV, RMC,VTG2.1.10 Time – 1PPS Pulse- Level CMOS- Pulse duration 100 ms- Time reference At the pulse positive edge- Measurements Aligned to GPS second, ± microsecond3 HARDWARE INTERFACE AND CONFIGURATION SIGNALS3.1 Interfaces (pin – out) of the VPN2525SPrepared by: Checked by: Approved by:Formed on: DOCUMENT VPN2525S PAGE REV.Name A3Pin Name I/O Description Level1 VCC I Supply voltage 3.3 VDC ±5%2 GND Digitalground3 BOOT-SELECT I Boots in update mode, if high CMOS4 RXD1 I Serial Data Input A CMOS5 TXD1 O Serial Data Output A CMOS6 TXD2 O Serial Data Output B CMOS7 RXD2 I Serial Data Input B CMOS8 SPI_EN I Control-line for production test. Donot use, leave it open.9 VCCGSP3 O Control output for basebandCMOSprocessor. Do not use, leave it open.ground10 GND Digital11 RF_GND12 RF_GND13 RF_GNDAnalog grounds14 RF_GND15 RF_GND16 RF_GND17 RF_IN I GPS signal from connected antenna 50 ohms @1.575 GHzground18 RF_GND Analog19 V_ANT 020 VCCRF 021 V_BAT I Power for RTC and SRAM +3 VDC ±5%22 RESET_N I Resets the unit if active LOW CMOSPAGE REV .Formed on:DOCUMENTNameVPN2525SA4Pin Name I/O DescriptionLevel 23VCCI Supply voltage3.3 V DC ±5%24 SPI_DATA O 25 NADC_D I 26 SPI_CLK I Control-lines for production test. Donot use, leave it open. CMOS27GP100 I/OGeneral propose input/outputCMOS 28 OdometerI/O Alternate function is Odometerinterface for SiRFDRive (GSW3- version). Internal pull-down resistor. Default input at reset. Do not use, leave it open. CMOS30 GND Digital ground3.2 Configuration and timing signals- RESET_N :This pin provides an active-low reset input to the board. It causes theboard to reset and to start searching for satellites. If not utilized, this input pin maybe left open.- T-MARK :This pin provides 1 pulse per second output from the board, which is synchronized to within 1 mocrosecond of GPS time. The output is a CMOS levelsignal. - BOOT_SELECT :Set this Pin to high (+3.3 V DC) for reprogramming the flash ofthe VPN2525S family (for instance updating a new firmware for the VPN2525S).PAGE REV .Formed on:DOCUMENTNameVPN2525SA53.3 Serial communication signalsThe board supports two full duplex serial channels. All serial connections are at CMOS level. If you need different voltage levels, use appropriate level shifter, (e.g. MAX 3232 from Maxim) in order to obtain RS232 compatible signal levels. All supported variable baud rates can be controlled from the appropriate screens in SiRFdemo software. You can directly communicate with a PC serial port.- RXD1:This is the main receiving channel and is used to receive softwarecommands to the board from SiRFdemo software or from user written software.- RXD2:This is the auxiliary receiving channel and is used to input differentialcorrections to the board to enable DGPS navigation. - TXD1:This is the main transmitting channel and is used to output navigationand measurement data to SiRFdemo or user written software. - TXD2:For user’s application.3.4 DC input signals- VCC :This is the main DC power supply for 3.3 V ±5 % powered board VPN2525Sfamily.- RF_IN :Active antennas have an integrated low-noise amplifier. They can bedirectly connected to this pin (RF_IN ). If an active antenna is connected to RF_IN , the integrated low-noise amplifier of the antenna needs to be supplied with the correct voltage through pin V_ANT .C aution : Do not connect or disconnect the antenna while the VPN2525S family isrunning.Caution : The RF_IN is always fed from the input voltage on the V_ANT. Do not use any input voltage on this pin.PAGE REV .Formed on:DOCUMENTNameVPN2525SA6The other possibility is available when you connect the VCCRF output (which provides 2.85 V) to V_ANT , so that an antenna with 2.85 V supply voltage can be used. Hint: The input voltage on the V_ANT should be chosen in according to the antenna to be used.Note: The GPS receiver VPN2525S family has to be connected to an active GPSantenna with a max. current 25 mA. - VCCRF : This pin is an output, which provides +2.85 V DC, and can be connected to the V_ANT, to supply the connected GPS antenna (2.85 V active antenna).Prepared by: Checked by: Approved by:PAGE REV .Formed on:DOCUMENTNameVPN2525SA74 SOFTWARE INTERFACEThe SUNSHINE VPN2525S family supports NMEA-0183 and SiRF binary protocols. A short description of these protocols is provided herein.4.1 SiRF binary data messageTable 1 lists the messages for the SiRF output.Hex ASCII NameDescription0x02 2 Measured Navigation DataPosition, velocity and time 0x03 3 True Tracker Data Not implemented0x04 4 Measured Tracking Data Satellite and C/No information 0x06 6 SW Version Receiver software 0x077 Clock StatusCurrent clock status 0x08 8 50 BPS Subframe Data Standard ICD format 0x09 9 ThroughputNavigation complete data 0x0A 10 Error IDError coding for message failure 0x0B 11 Command Acknowledgement Successful request0x0C 12 Command No Acknowledgement Unsuccessful request 0x0D 13 Visible ListAuto Output 0x0E 14 Almanac DataResponse to Poll 0x0F 15Ephemeris DataResponse to Poll0x10 16 Test Mode 1For use with SiRFtest (Test Mode 1)0x11 17 Differential Corrections Received from DGPS broadcast 0x12 18 Ok To SendCPU ON/OFF (Trickle Power) 0x13 19 Navigation Parameters Response to Poll0x14 20 Test Mode 2 Additional test data (Test Mode 2)0x1C 28 Nav. Lib. Measurement Data Measurement Data0x1D 29 Nav. Lib. DGPS Data Differential GPS Data 0x1E 30 Nav. Lib. SV State Data Satellite State Data 0x1F 31 Nav. Lib. Initialization Data Initialization Data 0xFF 255Development DataVarious status messagesTable 1: SiRF Output MessagesPAGE REV .Formed on:DOCUMENTNameVPN2525SA8T able 2 lists the message list for the SiRF input messages.Hex ASCII Name Description0x55 85 Transmit Serial Message User definable message0x80 128 Initialize Data Source Receiver initialization and associated Parameters0x81 129Switch to NMEA ProtocolEnable NMEA message, output rate and baud rate0x82 130 Set Almanac (upload) Sends an existing almanac file to the Receiver0x84 132 Software Version (Poll) Polls for the loaded software version 0x85 133DGPS Source ControlDGPS correction source and beacon receiver information0x86 134 Set Main Serial Port Baud rate, data bits, stop bits and parity0x87 135 Switch Protocol Obsolete0x88 136 Mode Control Navigation mode configuration0x89 137 DOP Mask Control DOP mask selection and parameters0x8A 138 DGPS Mode DGPS mode selection and timeout value0x8B 139 Elevation Mask Elevation tracking and navigation masks 0x8C 140 Power Mask Power tracking and navigation masks0x8D 141 Editing ResidualNot implemented 0x8E 142 Steady-State Detection -not used Not implemented0x8F 143 Static Navigation Configuration for static operation 0x90 144 Poll Clock Status (Poll) Polls the clock status0x91 145 Set DGPS Serial Port DGPS port baud rate, data bits, stop bits and parity0x92 146 Poll Almanac Polls for almanac data 0x93 147 Poll Ephemeris Polls for ephemeris data 0x94 148 Flash UpdateOn the fly software update0x95 149 Set Ephemeris (upload) Sends an existing ephemeris to the receiver0x96 150 Switch Operating ModeTest mode selection, SV ID and period 0x97 151 Set Trickle Power ParametersPush to fix mode, duty cycle and on time0x98 152 Poll Navigation Parameters Polls for the current navigation parameters0xA5 165 Set UART Configuration Protocol selection, baud rate, data bits, stop bits and parity0xA6 166 Set Message RateSiRF binary message output rate 0xA7 167 Low Power Acquisition ParametersLow power configuration parameters 0xB6182Set UART ConfigurationObsoleteTable 2: SiRF Input MessagesPAGE REV .Formed on:DOCUMENTNameVPN2525SA94.2 NMEA data messageThe SiRFstarlll evaluation receiver is capable of outputting data in the NMEA-0183 format as defined by the National Marine Electronics Association (NMEA), Standard for Interfacing Marine Electronic Devices, Version 2.20, January 1,1997. 4.2.1 NMEA output messagesTable 3 lists all NMEA output messages supported by SiRFstarlll evaluation receiver and a brief description.Option Description GGA Time, position and fix type data.GLL Latitude, longitude, UTC time of position fix and status.GSA GPS receiver operation mode, satellites used in the position solution and DOP values.GSV The number of GPS satellites in view satellite ID numbers, elevation, azimuth and SNR values.MSS(This message can be switched on via SiRFdemo software) Sign-to- noise ratio, signal strength, frequency and bit rate from a radio-beacon receiver.RMC Time, date, position, course and speed data. VTGCourse and speed information relative to the ground.Table 3: MEA Output Messages 4.2.2 NMEA input messagesMessage MID 1DescriptionSet Serial Port 100 Set PORT A parameters and protocol Navigation Initialization 101 Parameters required for start using X/Y/Z 2Set DGPS Port 102 Set PORT B parameters for DGPS input Query/Rate Control 103 Query standard NMEA message and/or set output rateLLA Navigation Initialization 104 Parameters required for start using Lat/Lon/Alt 3Development Data On/Off 105 Development Data messages On/Off MSK Receiver Interface MSKCommand message to a MSK Radio-beacon receiverTable 4: MEA Input MessagesPrepared by: Checked by: Approved by:PAGE REV . Formed on:DOCUMENTNameVPN2525SA101. Message Identification (MID).2. Input co-ordinates must be WGS84.3. Input co-ordinates must be WGS84.Note: NMEA input messages 100 to 105 are SiRF proprietary NMEA messages. The MSK NMEA string is as defined by the NMEA 0183 standard. 4.2.3 Transport MessageStart Sequence Payload Checksum End Sequence $PSRF<MID>1Data 2CKSUM 3<CR> <LF>41. Message Identifier consisting of three numeric characters. Input messages beginat MID 100.2. Message specific data. Refer to a specific message section for <data>…<data> definition.3. CHECKSUM is a two-hex character checksum as defined in the NMEA specification. Use of checksums is required on all input messages.4. Each message is terminated using Carriage Return (CR) Line Feed (LF) which is \r\n which is hex 0D 0A. Because \r\n are not printable ASCII characters, they are omitted from the example strings, but must be sent to terminate the message and cause the receiver to process that input message.CheckSumThe checksum is 15-bit checksum of the bytes in the payload data. The following pseudo defines the algorithm used. Let message to be the array of bytes to be sent by the transport.Let msgLen be the number of bytes in the message array to be transmitted.Clearly to say, the string over which the checksum has to be calculated is between the “$” and “*” (without characters “$” and “*”). Index = first checkSum = 0 while index < msgLen checkSum = checkSum + message[index] checkSum = checkSum AND (215 – 1)Note: All fields in all proprietary NMEA messages are required, none are optional.PAGE REV . Formed on:DOCUMENTNameVPN2525SA12Consider for a long time in the soldering zone (with temperature higher than 180℃) has to be kept as short as possible to prevent component and substrate damages.Peak temperature must not exceed 240℃. VPN2525S family are able to withstand twice the previous recommended reflow profile in order to be compatible with a double reflow when SMDs are mounted on both sides of the PCB. A maximum of two soldering reflows are allowed for these packages. The use of a no clean flux is highly recommended to avoid any cleaning operation. In order to prevent any bump cracks, ultrasonic cleaning methods are not recommended.6 FIRST STEPS TO MAKE IT WORKPAGE REV . Formed on:DOCUMENTNameVPN2525SA13- Antenna : The antenna connection is the most critical part of PCB routing. Before placing the VPN2525S on the PCB, secure that the connection to the antenna signals is routed. In order to make it properly functional, a control impedance line has to connect the RF_IN signal with antenna feed points or antenna connector, respectively. The routing on the PCB depends on your choice.- Power : The input power is also very important as far as the minimum and maximum voltage is concerned. The power supply of VPN2525S family has to be a single voltagesource of VCC at 3.3 VDC ±5%. The power supply has to be able to provide a sufficient current which typically rises to 200 mA. Please, connect GND pins to ground, and connect the lines which supply the VCC pin to +3.3 V, properly. If they are correctly connected, the board is full powered and the unit begins obtaining its position fix.- Serial Interface : The VPN2525S family provides two serial interfaces. Each interface isprovided with two wires the RXD1 and TXD1 support line and ground for the first serial interface (port A) and RXD2 and TXD2 support line and ground for the second serial interface (port B). These pins are 3.3 V CMOS compatible. In order to use different voltage levels, an appropriate level shifter has to be used. E.g. in order to provide RS232 compatible levels use the 3 V compatible MAX3232transceiver from Maxim or others based on the required levels. The GPS data will be transmitted through port A (first serial port), if an active antenna is connected, which has a good view to sky (no obstacle). You can use port B (second serial port) to feed in DGPS correction data. Pull-up (100k Ω) unused SDI inputs. - Active Antenna Bias Voltage: The output voltage at the antenna cable can be used to power the bias voltage of the antenna, provided can make sure that the antenna runs down to 2.7 V bias voltage and the current does not exceed 20 mA. - Backup Battery : In case of a power interruption on pin VCC the real-time clock and backed-up SRAM are continually supplied through V_BAT . The voltage at this pin has to be +3 V DC ±5%. If you do not use a backup battery, connect this pin toPrepared by: Checked by: Approved by:PAGE REV.DOCUMENT VPN2525SThe quickest way to get first results with the VPN2525S is to use the VPN2525S Evaluationboard together with the program SiRFdemo.The Evaluation board contains:- Evaluation Box- VPN2525S sample with soldered antenna cable- Power supply (AC/DC adapter, Type FW738/05, Output 5VDC 1.3A)- Active GPS antenna (FAL-ANT-3)- RS232 level shifter- RS232 cable to your computerThe Evaluation board with contained components are not included in the deliverpackage. In order to have one, the user of VPN2525S family has to purchase it.Prepared by: Checked by: Approved by:PAGE REV.DOCUMENT VPN2525S。
100种实用机械设计资料下载地址

1-机械常识500问.doc 下载地址:/file/hero41790/7d41dacc/2-新版机械加工工艺图集.pdf 下载地址:/file/hero41790/0a8bd3f6/3-实用钳工手册.pdf 下载地址:/file/hero41790/0192ec4e/4-机械设计手册(新编软件版2008).iso 下载地址:/file/hero41790/50e37574/5-机械设计手册(新编软件版)2008.CRACK.rar 下载地址:/file/hero41790/50e37574/6-机械制图教程.pdf 下载地址:/file/hero41790/30784fea/7- 机械结构合理设计图册.rar 下载地址:/file/hero41790/36669d81/8- 机械设计禁忌手册.pdf 下载地址:/file/hero41790/3b87d198/9- 机床夹具结构图册_0.pdf 下载地址:/file/hero41790/66f6ba7a/10-机构设计实用构思图册.pdf 下载地址:/file/hero41790/6ddd5dc4/11-机床夹具设计手册.pdf 下载地址:/file/hero41790/6ed53874/12-轴承手册04版.pdf 下载地址:/file/hero41790/8a6174bb/13-液压系统设计图集.pdf 下载地址:/file/hero41790/9d34b1ae/14-现代轿车车身设计.pdf 下载地址:/file/hero41790/b02b8bb9/15-中国模具设计大典.pdf 下载地址:/file/hero41790/b58a2e16/16-最新实用五金手册(修订本).rar 下载地址:/file/hero41790/b94db105/ 17-常用机械零件及机构图册.pdf 下载地址:/file/hero41790/e5655ccb/18-非标准机械设备设计手册.pdf 下载地址:/file/hero41790/eac63d75/19-常用钣金工计算下料手册.pdf 下载地址:/file/hero41790/1f9ee9f1/20-国家标准CAD图框模板.rar 下载地址:/file/hero41790/03acd761/21-模具设计方法(铸塑模具部分).pdf 下载地址:/file/hero41790/140e0d86/ 22-模具设计合理化(全彩三维模型讲解).pdf 下载地址:/file/hero41790/2a5ab41c/23-攻牙孔径对照表.doc 下载地址:/file/hero41790/51a02fc9/24-重型机械工艺手册.rar 下载地址:/file/hero41790/7af232b2/25-凸轮设计手册cam design handbook.pdf 下载地址:/file/hero41790/9d0c9e62/26-模具设计与制造基础知识.pdf 下载地址:/file/hero41790/9f8846a9/27-pro E模具设计基础教程.pdf 下载地址:/file/hero41790/a863dd75/28-机械传动装置选用手册.pdf 下载地址:/file/hero41790/ed5c90d5/29-钳工划线问答.pdf 下载地址:/file/hero41790/1255879e/30-铣工实用手册.pdf 下载地址:/file/hero41790/89352600/31-钳工应用手册.pdf 址载地址:/file/hero41790/a44cc19c/32-仪表工手册.pdf 下载地址:/file/hero41790/ad069783/33-汽车理论.pdf 下载地址:/file/hero41790/0405a59e/34-机械加工工艺图集国内外先进工艺、技术革新、专利与窍门.pdf 下载地址:/file/hero41790/2845c69b/35-金属压铸成型新工艺与压铸件生产新技术及压铸模设计制造选用国内外最新压铸技术标准应用实务全书.pdf下载地址: /file/hero41790/2b56a915/36-汽车图解说明.rar 下载地址:/file/hero41790/36b6de97/37-汽车构造图解flash 动画演示.chm 下载地址:/file/hero41790/42c60755/ 38-汽车主动被动安全设备篇.pdf 下载地址:/file/hero41790/555443ee/39-机械制图(国标).pdf 下载地址:/file/hero41790/63c12c6e/40-机械设计、制造工艺、质量检测与标准规范全书.pdf 下载地址:/file/hero41790/6f6fbc92/41-形位公差培训.ppt 下载地址:/file/hero41790/80d20ca9/42-铸造工艺设计技术与生产质量控制实用手册.pdf 下载地址:/file/hero41790/874ffe2f/43-现代表面处理新工艺、新技术与新标准.pdf 下载地址:/file/hero41790/943427cb/44-粉末冶金材料及其制品生产新技术新工艺及质量检验新标准实用手册.pdf 下载地址:/file/hero41790/9da4bf64/45-热镀锌电镀锌及锌合金创新生产工艺实用全书.pdf 下载地址:/file/hero41790/afb385f8/46-密封件与密封手册.pdf 下载地址:/file/hero41790/d3bb4d8b/47-GB-T 1804-2000 一般公差未注公差的线性和角度尺寸的公差.pdf 下载地址:/file/hero41790/9333dd5f/48-[CA TIA.V5R17.P3.中文版].CA TIA.P3.V5R17.CRACK.CD1.rar 下载地址:/file/hero41790/af00921e/49-[CA TIA.V5R17.P3.中文版].CA TIA.P3.V5R17.CRACK.CD2.rar 下载地址:/file/hero41790/5c7c8231/50-Cimatron 视频教程:15_2.5轴加工.avi (246.62 MB) 下载地址:/file/hero41790/ee902196/51-Cimatron 视频教程:16_三轴粗加工编程.avi (127.22 MB) 下载地址:/file/hero41790/00087752/52-Cimatron 视频教程:17_各种精加工的主要方式.avi (228.25 MB) 下载地址:/file/hero41790/adf85b1f/53-Cimatron 视频教程:18_流线加工-A.avi (127.97 MB) 下载地址:/file/hero41790/77adba99/54-Cimatron 视频教程:18_流线加工-B.avi (46.85 MB) 下载地址:/file/hero41790/a271dabb/55-Cimatron 视频教程:19_笔式清角-C.avi (31.46 MB) 下载地址:/file/hero41790/21613376/56-Cimatron 视频教程:20_三轴电极加工.avi (60.62 MB) 下载地址:/file/hero41790/57c7e4d9/57-Cimatron 视频教程:21_三轴型腔加工-A.avi (99.22 MB) 下载地址:/file/hero41790/c3f87e6d/58-Cimatron 视频教程:21_三轴型腔加工-B.avi (120.54 MB) 下载地址:/file/hero41790/505b6bd7/59-Cimatron 视频教程:22_三轴型芯加工-A.avi (85.1 MB) 下载地址:/file/hero41790/76d36c5d/60-Cimatron 视频教程:22_三轴型芯加工-B.avi (136.85 MB) 下载地址:/file/hero41790/8fed5d13/61-Cimatron 视频教程:19_新的自动清角-A.avi (153.63 MB)下载地址:/file/hero41790/bf85022f/62-Cimatron 视频教程:19_自动清角新旧对比-B.avi (67.65 MB)下载地址:/file/hero41790/9045f9d2/63-Cimatron 视频教程:23_五轴定位加工.avi 下载地址:/file/hero41790/d8632f33/64-Cimatron 视频教程:24_五轴模具加工.avi 下载地址:/file/hero41790/22279813/65-Cimatron 视频教程:25_五轴航空铣零件加工.avi 下载地址:/file/hero41790/45840a73/66-Cimatron 视频教程:26_上下异形线切割编程.avi 下载地址:/file/hero41790/809d1268/67-材料力学Ⅰ作者:孙训方.pdf 下载地址:/file/hero41790/20992ab2/68-材料力学Ⅱ作者:孙训方.pdf 下载地址:/file/hero41790/9a3f2184/69-钣金手册.pdf 下载地址:/file/hero41790/277e97b8/70-冲压件设计指导.pdf 下载地址:/file/hero41790/2b30712e/71-机械零件第二卷.pdf 下载地址:/file/hero41790/33be4bdb/72-机械零件第一卷.pdf 下载地址:/file/hero41790/a8c76561/73-机械零件第三卷.pdf 下载地址:/file/hero41790/99ad869a/74-焊接手册(第2版):第1卷-焊接方法及设备.pdf 下载地址:/file/hero417 90/46eb7c2f/75-焊接手册(第2版):第2卷-材料的焊接.pdf 下载地址:/file/hero41790/7 e048042/76-焊接手册(第2版):第3卷-焊接结构.pdf 下载地址:/file/hero41790/5e6 d1eec/77-新编钣金技术与展开计算实用手册.pdf 下载地址:/file/hero4 1790/54270b65/78-机械设计手册.(新版).第2卷.pdf 下载地址:/file/hero41790/90139d0 1/79-机械设计手册.(新版).第5卷.pdf 下载地址:/file/hero41790/d48f4dad/80- [机械]机电工程师手册(847页).pdf 下载地址:/file/hero41790/8724c ea1/81-[机械]空间机构设计.PDF 下载地址:/file/hero41790/7a210bae/82-[机械]高速旋转机械轴系动力学设计.pdf 下载地址:/file/hero41790/77a9 34e0/83-[机械]工矿企业电气工程师手册-王士政(1023页).pdf 下载地址:/fi le/hero41790/6f0ca365/84-[机械]电工学重要公式实用手册.pdf 下载地址:/file/hero41790/515dbb36 /85-[机械]高等机构设计.pdf 下载地址:/file/hero41790/4f365e54/86-[机械]电火花基础.pdf 下载地址:/file/hero41790/4f21b236/87-[机械]精密间歇机构.pdf 下载地址:/file/hero41790/2ff68def/88-[机械]机构精确度.pdf 下载地址:/file/hero41790/2d31dfeb/89-[机械]机械制造工艺基础1.pdf 下载地址:/file/hero41790/2d1dd035/90-[机械]现代机械动力学.北工大.余跃庆.1998.pdf 下载地址:/file/hero41790/1b8a2102/91- 透平机械现代制造技术丛书-机匣制造技术.pdf 下载地址:/file/hero41790/1567e990/92-透平机械现代制造技术丛书-叶片制造技术.pdf 下载地址:/file/hero41790/02da0942/93-透平机械现代制造技术丛书-装配试车技术.pdf 下载地址:/file/hero41790/007a1273/94-MT397-1995 煤矿模拟盘通用技术条件.pdf 下载地址:/file/hero41790/ce9f4606/95-MT-T405-1995 煤矿生产调度自动交换电话总机通用技术条件.pdf 下载地址:/file/hero41790/c8df5fd6/96-MT563-1996 煤矿用携带型气体测定仪器通用技术条件.pdf 下载地址:/file/hero41790/da39c22f/97-MT-T772-1998 煤矿监控系统主要性能测试方法.pdf 下载地址:/file/hero41790/ebd6f0be/98-MT445-1995 煤矿用高浓度热导式甲烷传感器技术条件.pdf 下载地址:/file/hero41790/dc56be1b/99-MT706-1997 一般兼矿用本质安全型安全栅.pdf 下载地址:/file/hero41790/cd1c1956/100-MT491-1995 煤矿防爆蓄电池电机车通用技术条件.pdf 下载地址:/file/hero41790/dfa606ca/。