第7章 图
运筹学课件:第7章 图论与网络分析-第1,2节
v1
v2 a
v3
v4 c
b v1
a
v2
b
v3
d
d
v4
c
第2节 最小树问题
一、树及其性质 定义1: 无圈的连通图称为树。树一般用T表示。
定理1: 任给树T=(V,E),若P(T)≥2,则 T中至少有两个悬挂点。
证明:设µ=(v1,v2,…,vk)是G中含边数最多的 一条初等链,因P(T)≥2,并且T是连通的, 故链µ中至少有一条边,从而v1与vk是不同的 。
不少数学家都尝试去解析这个事例。而这些解析,最 后发展成为了数学中的图论。
例:中国邮路问题 一个邮递员送信,要走完他所负责的全部街道分送
信件,最后返回邮局。邮递员都会本能地以尽可能少的 行程完成送信任务。
问题:他如何走?
点:路口; 边:两路口之间道路,第i条道路长ei。
问题:求一个圈,过每边至少一次,并使圈长度最短。
由于T是树,由定义知T连通且无圈。只须证明m=n-1。
归纳法: 当n=2时,由于T是树,所以两点间显然有且 仅有一条边,满足m=n-1。
假设 n=k-1时命题成立,即有k-1个顶点时,T有k-2条边。
当n=k时,因为T连通无圈,k个顶点中至少有一个点次 为1。设此点为u,即u为悬挂点,设连接点u的悬挂边 为[v,u],从T中去掉[v,u]边及点u ,不会影响T的连 通性,得图T’,T’为有k-1个顶点的树,所以T’有k-2条 边,再把( v,u)、点u加上去,可知当T有k个顶点 时有k-1条边。
4
2
v4
94
v2
3
v3 8
0 9 2 4 7 9 0 3 4 0 其权矩阵为: A 2 3 0 8 5 4 4 8 0 6 7 0 5 6 0
工程制图第7章 零件图

一组视图 完整尺寸
技术要求 标题栏
二、零件图的内容
1.视图 根据有关标准和规定,用正投影法表达零件内、外结 构的一组图形。
2.尺寸 零件图应正确、完整、清晰、合理地标注零件制造、 检验时所需的全部尺寸。
3.技术要求 标注或说明零件制造、检验或装配过程中应达到 的各项要求,如表面粗糙度、极限与配合、形状和位置公差、 热处理、表面处理等要求。
1.主视图的表达
1)形状特征的表达
能够清楚地表达主要形体的形状特征
2)加工位置的表达
反应了零件的加工位置
例如:(轴、盘类)
3)工作位置原则
反应了零件的工作位置
例如: (支架、壳体类)
2.其他视图的表达
首先读表达主要形体的其它视图,再读次要形体的视图。
二、典型零件图的视图的表达方法 1.轴、套类零件表达 ⑴ 分析形体、结构
4.标题栏 标题栏画在图框的右下角,需填写零件的名称、材 料、数量、比例,制图、审核人员的姓名、日期等内容。
§7-2 零件图的视图
一、视图表达的一般原则 1.主视图表达 2.其他视图的表达
二、典型零件图的视图的表达方法
轮盘类
支架
轴
传动装置
一、视图表达的一般原则
能正确、完整、清晰、合理地表达出零件的全部结构形状、读图 方便、画图简单。在画图前从零件的结构特点、使用功能和加工 方法等进行分析,选用了适当的视图和各种方法进行表达
基本符号上加一小圆,表示表面粗糙度是用不去除材料的 方法获得,如:铸,锻,冲压、热轧、冷轧、粉末冶金等; 或是用保持原供应状况的表面。
用任何方法获得的表面粗糙度,Ra 的上限值 3.2μ m。
用去除材料方法获得的表面粗糙度,Ra 的上 限值3.2μ m。
uml建模第七章 交互图

图7-13 ref操作符
7.1 顺序图——顺序图的深入
顺序图中使用其它的技术: 1、使用注释 2、使用约束 3、使用状态
7.1 顺序图——顺序图建模
1. 为每一个用例编写事件流,包括一个基本事件 流和若干可选事件流或异常流; 2. 识别事件流中参与交互的对象; 3. 为每个事件流绘制顺序图,包括为每个对象设 置生命线,即确定哪些对象存在于整个交互过 程中,哪些对象在交互过程中被创建和撤销; 4. 从引发这个交互过程的初始消息开始,在生命 线之间自顶向下依次画出随后的各个消息; 5. 如果需要,可以画上交互片段、交互引用和约 束等。
7.2 通信图
三、组成元素 1、对象
(2)主动对象(活动对象) 一组属性和一组方法的封装体,其中至少有一 个方法不需要接收消息就能主动执行(称作主 动方法)。
UML中
Rose中
7.2 通信图
三、组成元素 2、链
用来连接对象,消息显示在链的旁边,一个链 上可以有多个消息。 在顺序图中不使用链,只有协作图中才使用链 的概念。
图7-5 嵌套编号
Rose中的消息
7.1 顺序图——顺序图的深入
顺序图中,对象的行为有循环和分支两
种方式,为了表示这两种行为,引入了 交互片段、区域和操作符的概念。
7.1 顺序图——顺序图的深入
每个交互片段都有一个操作符,操作符
决定了交互片段的执行方式。
1、表示分支的操作符
alt:支持多条件
表7-2常用迭代表达式
迭代表达式 [i:=1..n] [I=1..10] [while(表达式)] [until(表达式)]
语义 迭代n次
I迭代10次 表达式为true时才进行迭代 迭代到表达识为true时,才停止迭代 在对象集合上迭代
第7章 图论 [离散数学离散数学(第四版)清华出版社]
![第7章 图论 [离散数学离散数学(第四版)清华出版社]](https://img.taocdn.com/s3/m/58b7923143323968011c9244.png)
6/27/2013 6:02 PM
第四部分:图论(授课教师:向胜军)
21
例:
a j i h c g d
1(a)
无 向 图
b
f
e
2(b)
7(j) 8(g) 9(d) 10(i)
6(e)
3(c) 4(h)
5(f)
6/27/2013 6:02 PM
第四部分:图论(授课教师:向胜军)
22
例:
1(b)
有向图
第四部分:图论(授课教师:向胜军)
6
[定义] 相邻和关联
在无向图G中,若e=(a, b)∈E,则称a与 b彼此相邻(adjacent),或边e关联 (incident) 或联结(connect) a, b。a, b称为边e的端点或 结束顶点(endpoint)。 在有向图D中,若e=<a, b>∈E,即箭头 由a到b,称a邻接到b,或a关联或联结b。a 称为e的始点(initial vertex),b称为e的终点 (terminal/end vertex)。
证明思路:将图中顶点的度分类,再利用定理1。
6/27/2013 6:02 PM 第四部分:图论(授课教师:向胜军) 9
[定理3] 设有向图D=<V, E>有n个顶点,m 条边,则G中所有顶点的入度之和等于所 有顶点的出度之和,也等于m。
即:
d ( v i ) d ( v i ) m.
i 1 i 1
n
n
证明思路:利用数学归纳法。
6/27/2013 6:02 PM
第四部分:图论(授课教师:向胜军)
10
一些特殊的简单图:
(1) 无向完全图Kn(Complete Graphs)
[UNL课件] 第7章 序列图
![[UNL课件] 第7章 序列图](https://img.taocdn.com/s3/m/0ce430c949649b6648d7477e.png)
• 协作图(ration diagram)
– 强调发送和接收消息的对象的机构组织的交互图。
7.1 序列图的基本概念
– 序列图的用途
• 确认和丰富语境的逻辑表达; • 细化用例的表达;
• 描述类所分配职责及分配原因。
: SearchBookWindow : Borrower 1: 查找图书 2: 根据条件查找图书 3: 返回图书信息 4: 显示图书信息 : Book
• 示例1:使用序列图描述网络通信的过程。
– 过程描述如下:
• 发送者和接收者是通信双方。 • 发送者通过发送一个启动事务的包来与接收者建立 连接。接收者成功的读取此包,并回复确认信息。 • 发送者收到确认信息后,会传输一个文件开始的包 ,这个包也被接收者确认。 • 完成3次确认后,文件数据进行传输。 • 传输完成后通信结束。
• 销毁一个对象并回收占用资源。对象可以销毁自己。 • 销毁对象时,在其生命线上画“ X ”。
7.3 序列图的高级概念
• 2、顺序图中的结构化控制
– 序列型消息
条件、 循环、并发
– 使用控制操作符进行结构化控制。
7.3 序列图的高级概念
– 1)可选
• 标签:opt • 说明:
– 如果进入操作符的时候监护条件成立,那么该控制操 作符的主体就会得到执行。
2: 创建取款界面 ( ) 3: 显示取款界面 ( )
: 用户
1: 选择取款事务 ( )
4: 输入取款金额 ( ) 5: 账户余额校验 ( ) 6: 查询账户余额 ( ) 7: 返回账户余额 8: 修改账户余额 ( ) 9: 返回结果:取款成功 10: 提示取走现金,询问下一步业务 ( )
机械制图第7章(标准件与常用件)

上一页 下一页 返回
7.1 螺纹
2.管螺纹 在水管、油管、煤气管的管道连接中常用管螺纹,它们是 英寸制的。有非螺纹密封的内、外管螺纹和用螺纹密封的圆 柱内管螺纹;还有用螺纹密封的圆锥内、外管螺纹。前者代号 分别为G和 R p ;后者代号为 RC 和R( R1 和 R2 ,其中 R1 表示 与圆柱内螺纹相配合的圆锥外螺纹, R2 表示与圆锥内螺纹相 配合的圆锥外螺纹)。管螺纹应标注螺纹特征代号和尺寸代号; 非螺纹密封的外管螺纹还应标注公差等级;当螺纹为左旋时, 应在最后加注"LH",并用“-”隔开。尺寸代号与带有外螺 纹管子的孔径相近,而不是管螺纹的大径。非螺纹密封的管 螺纹的大径、小径和螺距。
上一页 下一页 返回
7.2常用螺纹紧固件
7.2.2 双头螺柱连接
双头螺柱连接由双头螺柱、螺母和垫圈组成。在两个被连接 的零件中,其中有一个较厚或不适宜用螺栓连接时,常采用 双头螺柱连接。事先在较薄的连接零件上钻有比螺栓大径略 大的通孔(=1. 1d),在较厚的连接零件上加工出内螺纹孔。 已知双头螺柱的形式、公称直径、被联接件的厚度以及旋入 端的材料,由此估算螺柱的长度L„。 L„=较薄零件的厚度( )+垫圈厚度(0. 15d)+螺母厚度(0. 8d) +a 式中:a = (0. 3 -0. 4)d,是螺柱顶端露出螺母的长度。根 据此式算出的参考长度L'。
上一页
返回
7.2常用螺纹紧固件
螺纹紧固件就是运用一对内、外螺纹的连接作用来连接和紧 固一些零部件。常用的螺纹紧固件有螺钉、螺栓、螺柱(亦称 双头螺柱)、螺母和垫圈等。螺纹紧固件的结构、尺寸均已标 准化,并由有关专业工厂大量生产。根据螺纹紧固件的规定 标记,就能在相应的标准中查出有关的尺寸。因此,对符合 标准的螺纹紧固件,不需再详细画出它们的零件图。表7-2 列出了图7-12所示的常用螺纹紧固件的视图、主要尺寸及 规定标记示例。
第7章 协作图

使用Rose创建协作图
3. 创建链
在协作图中创建链的操作与在对象图中创建链的操作相同,可以 按照在对象图中创建链的方式进行创建。同样我们也可以在链的 规范对话框的“General”选项卡中设置链的名称、关联、角色 以及可见性等。 链的可见性是指一个对象是否能够对另一个对象可见的机制。
在项目中创建协作图案例分析
什么是协作图
2. 为什么要使用协作图
协作图作为一种在给定语境中描述协作中各个对象之间的组织交互关系 的空间组织结构图形化方式,在使用其进行建模时,可以将其作用分为 以下三个方面:
通过描绘对象之间消息的传递情况来反映具体的使用语境的逻辑表达。一个 使用情境的逻辑可能是一个用例的一部分,或是一条控制流。这和序列图的 作用类似。
时序图与协作图的互换
①
②
时序图与协作图都表示对象之间的交互 作用,只是它们的侧重点有所不同: 时序图描述了交互过程中的时间顺序, 但没有明确地表达对象之间的关系。 协作图描述了对象之间的关系,但时间 顺序必须从顺序号获得。 两种图的语义是等价的,可以从一种形 式的图转换成另一种形式的图,而不丢 失任何信息。
组成协作图的元素
3. 链
在协作图中的链和对象图中链的概念和表示形式都相同,都是两个或多 个对象之间的独立连接,是对象引用元组(有序表),是关联的实例。
在协作图中,链的表示形式为一个或多个相连的线或弧。在自身相关联 的类中,链是两端指向同一对象的回路,是一条弧。为了说明对象是如 何与另外一个对象进行连接的,我们还可以在链的两端添加上提供者和 客户端的可见性修饰。如下图所示,是链的普通和自身关联的表示形式。
消息
离散数学第七章图的基本概念

4.无向图的连通性
若无向图G中任何两顶点都连通,则称G是连通图.
对于任意的无向图G.设V1,V2,…,Vk是顶点之间连通关系的 等价类,则称他们的导出子图为G的连通分支.用p(G)表示G 的连通分支数.
V1 e1
e2 e3
V3
e4 V2
V4
a
de
h
i
b
c
f
g
5.有向图的连通性
若略去有向图D中各边的键头,所得无向图是无向连通图,则 称D是弱连通图(或称D是连通图).
(2) mij d (vi )(i 1,2,..., n)
j 1
mn
nm
n
(3) mij mij d(vi ) 2m
j1 i1
i1 j1
i 1
m
(4) mij 0 vi是孤立点 j 1
(5)若第j列与第k列相同, 则说明e j与ek为平行边.
2.有向图的关联矩阵
设有向图D=<V,E>,V={v1,v2,…,vn},E={e1,e2,…,em} 1, vi为ej的始点
e1,e2,e3},{e1,e2,
e2
e4},{e9}等边割集 ,e9是桥.
e3 V4
e5 e6
V5 e4
V6
e9
V7
7.3 图的矩阵表示
1.无向图的关联矩阵
设无向图G=<V,E>,V={v1,v2,…,vn},E={e1,e2,…,em}
令mij为顶点vi与ej的关联次数, 则称(mij)n×m为G的关联矩阵.记为M(G)
若Γ 满足:vi-1,vi为ei的端点(若G为有向图,vi-1是ei的始 点,vi是ei的终点)i=1,2,…,k,则称Γ 为G中通路,v0,vk分 别称为通路的始点和终点,Γ 中边的数目k称为通路长度.
第7章 状态图和活动图
图7.1 图书馆书籍的状态图
一个图书对象从它的起始点 开始,首先是“新书”状态 (new book),然后是“可 以借阅”(available)的状 态,如果有读者将书借走, 则该书的状态为“已借出” 状态(borrowed),如果图 书被归还图书馆,图书的状 态又变为“可以借阅”状态 。图书馆如果放弃该图书对 象的收藏,则图书对象处于 “删除”状态(delete),最 后到达“终止”状态。
7.2.1 活动图概述
在用例模型中,可以利用文本来描述用例的业务流程, 但如果业务流程较为复杂的话,则可能会难以阅读和 理解,这时需要用更加容易理解的方式(图形)来描 述业务过程的工作流,在UML中将这类描述活动流程 的图形称为活动图(Activity Diagram)。 活动图被设计用于简化描述一个过程或者操作的工作步 骤。活动用圆角矩形表示,接近椭圆。一个活动中的 处理一旦完成,则自动引起下一个活动的发生。箭头 表示从一个活动转移到下一个活动。和状态图类似, 活动图中的起点用一个实心圆表示,终点用一个实心 圆外加一个圆圈表示。在一个活动图中,只有一个起 始状态,可以有零个或多个终止状态。
第7章 状态图和活动图
7.1状态图
状态图,用于UML中建立动态模型,主要描述系
统随时间变化的行为,这些行为是用从静态视图中抽 取的系统的瞬间值的变化来描述的。在对象的生命期 建模中,状态图显示了一个状态机,展示的是单个对 象内从状态到状态的控制流。状态图通过对类的对象
的生存周期建立模型来描述对象随时间变化的动态行
7.2.7分叉和汇合
对象在运行时可能会存在两个或多个并发运行的控制流, 为了对并发的控制流建模,UML中引入了分叉与汇合的概 念。分叉用于将动作流分为两个或多个并发运行的分支, 而汇合则用于同步这些并发分支,以达到共同完成一项事 务的目的。 在UML中使用分叉和汇合表示并行发生的事件流。分叉表 示把一个单独的控制流分成两个或多个并发的控制流。一 个分叉可以有一个进入转移和两个或多个输出转移,每一 个转移表示一个独立的控制流。 汇合表示两个或多个并发 控制流的同步发生,一个汇合可以有两个或多个进入转移 和一个输出转移。分叉和汇合应该是平衡的。分叉和汇合 在图形上都使用同步条来表示,同步条通常用一条粗的水 平线表示。
第七章 图论

定理7-2.5 在有向图G=<V,E>中,它的每一个结点位于且只位 于一个强分图中。
7.3
图的矩阵表示
定义7-3.1 设G=<V,E>是一个简单图,它有n个结点V={v1,v2,·· n}, ·,v 则n阶方阵A(G)=(aij)称为G的邻接矩阵。 1 vi adj vj 其中aij= 0 vi nadj vj 或i=j adj表示邻接,nadj表示不邻接。
7-4
欧拉图与汉密尔图
定义7-4.1 给定无孤立结点图G,若存在一条路,经过图中每 边一次且仅一次,该条路称为欧拉路;若存在一条回 路,经过图中每边一次且仅一次,该回路称为欧拉回 路。具有欧拉回路的图称作欧拉图。
北区
A B
东区
岛区
D
C
南区
哥尼斯堡地图
定理7-4.1 无向图G具有一条欧拉路,当且仅当G是连通的,且有零 个或两个奇数度结点。 推论:无向图G具有一条欧拉回路,当且仅当G是连通的, 并且所有结点度数全为偶数。 G1中A,B,C,D四点度数为3,故不是Euler图,也不是一笔画; G2中A,B两点是3度,其它均为偶数点,故不是Euler图,但是 起终点不同的一笔画,起终点分别是A,B; G3中点的度数均为4,且连通,故它是Euler图, Euler回路 为ABCDAHDGCFBEHGFEA。在回路中各点均出现2次(起终点 多一次),因此每点均为4度。 注:Euler回路不是唯一的。 A A B
定理7-1.3 在任何有向图中,所有结点的入度之和等于所有 结点的出度之和。 证明: 因为每一条有向边必对应一个入度和一 个出度,若一个结点具有一个入度或出度,则必 关联一条有向边,所以,有向图中各结点入度之 和等于边数,各结点出度之和也等于边数,因此, 任何有向图中,入度之和等于出度之和。
机械制图第7章 零件图

4)选择视图除考虑完整、清晰外,视图数量选择要 恰当,以免主次不分。
7.3 典型零件的视图选择
7.3.1 轴套类零件 7.3.2 轮、盘类零件 7.3.3 叉架类零件 7.3.4 箱体类零件
7.3.1 轴套类零件
结构分析
主视图选择
其他视图选择
7.3.2 轮、盘类零件
7.3.3 叉架类零件
7.3.4 箱体类零件
7.4 零件图的尺寸标注
7.4.1 正确地选择尺寸基准 7.4.2 合理标注尺寸
7.4.1 正确地选择尺寸基准
尺寸基准的分类: (1)设计基准 (2)工艺基准
径 向 尺 寸 基 准
轴向尺寸基准
轴 向 辅 助 基 准
7.4.2 合理标注尺寸
1.重要尺寸要直接注出
l2
l1
k
k1
k2
l3
l2
2.符合加工顺序
毛坯
第一步
第二步
符合加工 顺序
不符合加 工顺序
3.便于测量
便 于 测 量
不 便 于 测 量
4.加工面和非加工面
合理
不合理
5.应避免注成封闭尺寸链
封闭尺寸链
开口环
参考尺寸
第7章 零件图
7.1 零件图的概述
7.2 零件的视图选择
7.3 典型零件的视图选择 7.4 零件图的尺寸标注
7.5 零件结构工艺简介
7.6 零件图的技术要求
7.7 读零件图
7.1 零件图的概述
7.1.1 零件图的内容 7.1.2 零件的分类
数据结构第7章习题答案
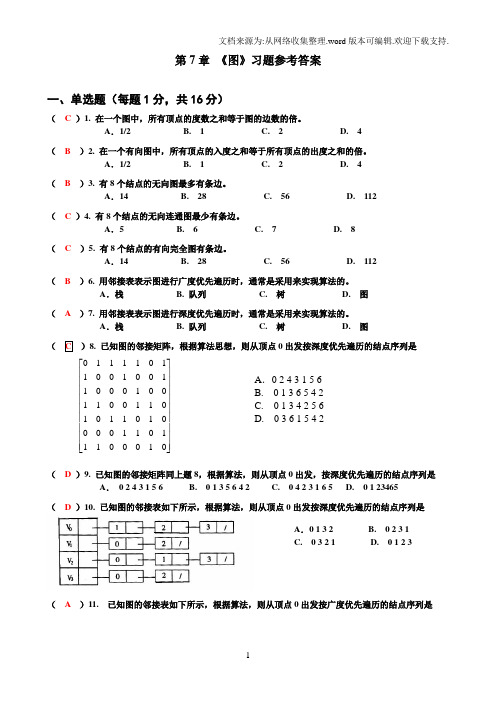
第7章 《图》习题参考答案一、单选题(每题1分,共16分)( C )1. 在一个图中,所有顶点的度数之和等于图的边数的倍。
A .1/2 B. 1 C. 2 D. 4 (B )2. 在一个有向图中,所有顶点的入度之和等于所有顶点的出度之和的倍。
A .1/2 B. 1 C. 2 D. 4 ( B )3. 有8个结点的无向图最多有条边。
A .14 B. 28 C. 56 D. 112 ( C )4. 有8个结点的无向连通图最少有条边。
A .5 B. 6 C. 7 D. 8 ( C )5. 有8个结点的有向完全图有条边。
A .14 B. 28 C. 56 D. 112 (B )6. 用邻接表表示图进行广度优先遍历时,通常是采用来实现算法的。
A .栈 B. 队列 C. 树 D. 图 ( A )7. 用邻接表表示图进行深度优先遍历时,通常是采用来实现算法的。
A .栈 B. 队列 C. 树 D. 图( C )8. 已知图的邻接矩阵,根据算法思想,则从顶点0出发按深度优先遍历的结点序列是( D )9. 已知图的邻接矩阵同上题8,根据算法,则从顶点0出发,按深度优先遍历的结点序列是A . 0 2 4 3 1 5 6 B. 0 1 3 5 6 4 2 C. 0 4 2 3 1 6 5 D. 0 1 23465 ( D )10. 已知图的邻接表如下所示,根据算法,则从顶点0出发按深度优先遍历的结点序列是( A )11. 已知图的邻接表如下所示,根据算法,则从顶点0出发按广度优先遍历的结点序列是A .0 2 4 3 1 5 6B. 0 1 3 6 5 4 2C. 0 1 3 4 2 5 6D. 0 3 6 1 5 4 2⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡0100011101100001011010110011001000110010011011110A .0 1 3 2 B. 0 2 3 1 C. 0 3 2 1 D. 0 1 2 3A.0 3 2 1 B. 0 1 2 3C. 0 1 3 2D. 0 3 1 2(A)12. 深度优先遍历类似于二叉树的A.先序遍历 B. 中序遍历 C. 后序遍历 D. 层次遍历(D)13. 广度优先遍历类似于二叉树的A.先序遍历 B. 中序遍历 C. 后序遍历 D. 层次遍历(A)14. 任何一个无向连通图的最小生成树A.只有一棵 B. 一棵或多棵 C. 一定有多棵 D. 可能不存在(注,生成树不唯一,但最小生成树唯一,即边权之和或树权最小的情况唯一)二、填空题(每空1分,共20分)1. 图有邻接矩阵、邻接表等存储结构,遍历图有深度优先遍历、广度优先遍历等方法。
人教版地理七年级下册第7章第1节日本课件 (共25张PPT)
3、防灾演练
由于日本地震频发,除了建筑有很强的抗震能力外,居民普遍都有 超强的逃生和避震意识。全国各地设有不少地震博物馆和地震知识学习馆, 免费向市民开放。在这些地震博物馆内,市民们能够亲身体验地震时的感 觉。借助博物馆内模拟火灾现场的烟雾走廊和模拟地震的震动平台,参观 者可以体验到6级地震发生时的状态。每年9月1日法定“防灾日”来临时, 日本各地都会举办地震防灾演练,向市民介绍面对突发灾难的应急对策, 也提醒市民加强危机意识。常年宣传普及之下,防震救灾意识在日本深入 人心。
问题探究:
A “看猴子” 引发的思考:
1、王小毛想去日本看猴子泡温泉,可以选 择哪些交通工具呢?为什么?
只能选择空运或海运,因为日本是一个岛国。
2、仔细阅读书本P14第一节文字及地图,说一说日 本的领土组成?首都是?试着评价一下岛屿国家的优劣性?
日本是太平洋西北部的一个岛国,领土由北海道、本州、四国、 九州四个大岛和周围数千(6848)个小岛组成,面积:377880平方 公里,约相当于俄罗斯的1/45,中国和美国的1/25;人口:1.3亿; 首都:东京
在防灾减灾领域,中日两国都有相互值得学习 借鉴的地方。
他山之石可以攻玉
2017年11月14日,“中日防灾减灾交流研讨会”在四川绵阳举行。今 年是汶川大地震9周年和东日本大地震6周年。本次研讨会是继2016年12月 的第二次举办,特邀了东日本大地震灾害对策最前线的友敏光先生来参加 研讨会。其目的是在两国大地震中,实际从事复兴工作经验者之间交流经 验与教训。通过研讨会,学习防震减灾知识,进一步总结经验与教训,加 深经验交流,相互学习。
(1)经纬度位置?
(2)海陆位置?
经纬度位置 125°E
145°E
45°N
机械制图第7章 零件图
零件图
形状特征原则
选取能将零 件各组成部分的 结构形状以及相 对应的位置反映 得最充分的方向 作为主视图投射 方向
零件图
该方向投影 最能显示零件的 形状特征,故作 为主视图投射方 向。
零件图
加工位置原则
按照零件在主要加工工序中的装夹位置 选取主视图,使主视图尽量与加工位置一 致,以便制造者看图。
零件图
二、典型结构的尺寸标注
锪平面
锥形沉孔
零件图
二、典型结构的尺寸标注
柱形沉孔
倒角
零件图
§7-4 零件图的技术要求
一、表面结构的图样表示及标注方法 二、极限、公差、偏差 三、形状和位置公差简介
四、材料的热处理及表面处理
零件图
一、表面结构的图样表示法
表面结构是表面粗糙度、表面波纹度、表面缺陷、 表面纹理和表面几何形状的总称,本节主要介绍常用 的表面粗糙度表示法。
Z
表面轮廓
Ra
X O 取样长度L
基准线
零件图 2.表面结构要求符号
2H
画法比例 H=3.5mm 线宽 0.35mm
H
60°
60°
零件图
符号名称 基本图形符号 符号 含义 未指定工艺方法的表面, 当通过一个注释解释时可 单独使用。 用去除材料方法获得的表 面,仅当其含义是“被加 工表面“时可单独使用 不去除材料的表面,也可 用于表示保持上道工序形 成的表面,不管这种状况 是通过去除或不去除材料 形成的 在以上各种符号的长边上 加一横线,以便注写对表 面结构的各种要求
该零件主要加工工序为车削,取轴线水平放置, 并取剖视表达内部结构。为表达端面、孔、筋等的分 布,配置左视图。配置辅助视图表达局部结构。
零件图
第7章(714)

图7-8 明细栏格式
第七章 装 配 图
三、标题栏 标题栏的格式和尺寸,按图1-3所示绘制。 部件或机器的结构不仅应该满足装配体的性能要求,而 且还应该满足装配体的加工工艺要求和装拆的方便。所以, 在设计时必须考虑装配结构的合理性。 一、对接触面结构的合理性要求 (1)当两个零件接触时,在同一方向上的接触面一般只 有一组,这样既保证装配精度,又便于加工,如图7-9所示。
7-2 装配图的画法
一、装配图的一般画法 装配图的画法和零件图的大致相同,表达零件的各种方 法如视图、剖视、剖面等都可以用来表达装配图,称为装配 图的一般表达方法。但装配图所表达的是许多零件组成的装 配体,不需要把每个零件的具体结构完全地表达清楚,所以 装配图还有一些特殊的画法。
第七章 装 配 图
第七章 装 配 图 图7-14 表面接触画法
第七章 装 配 图 图7-15 表面不接触画法
第七章 装 配 图
2.剖面线的画法 在装配图中,相邻两零件的剖面线方向应相反,若方向 一致则剖面线应间隔不等且互相错开。在各视图中,同一零 件的剖面线方向与间隔应保持一致,如图7-1所示。 3.实心零件、标准件的画法 对于紧固件和实心零件(如螺钉、螺栓、螺母、垫圈、 键、销、轴等),若剖切平面通过其轴线,则这些零件均按不 剖切绘制,如图7-1中的插脚、螺塞。这些零件有局部结构 需要表达时,可用局部剖的形式画出,如图7-1中的插脚上 的小孔,就是用局部剖的形式表示的。
第七章 装 配 图
(1)以表达装配关系、工作原理和结构特点最清楚的视 图作为主视图。如图7-1是无线电电子产品上常用的高频插 座的装配图,从图上可以明显看出,主视图采用全剖视,清 楚地表达了装配关系、各零件的相互位置和连接关系。
第7章 欧拉图

每逢假日, 城中居民进行环城游玩, 每逢假日, 城中居民进行环城游玩, 人 们对此提出了一个“遍游”问题, 们对此提出了一个“遍游”问题, 即能否 有这样一种走法, 有这样一种走法, 使得从某地出发通过且 只通过每座桥一次后又回到原地呢? 只通过每座桥一次后又回到原地呢?
我们将图7.4.1中的哥尼斯堡城的 块陆地 中的哥尼斯堡城的4块陆地 我们将图 中的哥尼斯堡城的 部分分别标以A, , 部分分别标以 , B, C, D, 将陆地 , 设想为图的结点, 设想为图的结点, 而把桥画成相应的连 接边, 这样图7.4.1可简化成图 可简化成图7.4.2。 于 接边, 这样图 可简化成图 。 是七桥“ 遍游” 问题等价于在图7.4.2中 , 是七桥 “ 遍游 ” 问题等价于在图 中 从某一结点出发找到一条回路, 从某一结点出发找到一条回路, 通过它 的每条边一次且仅一次, 的每条边一次且仅一次, 并回到原来的 结点。 结点。
问题的答案是肯定的。 解: 问题的答案是肯定的。下面谈一下解决这个 问题的思路。 问题的思路。 设αi∈{ 0, 1 }(i∈N16)。 每旋转一格, , }( ∈ 每旋转一格, 信号从α 转到α 信号从 1α2α3α4转到 2α3α4α5,前者的右 3 位决 定了后者的左 3 位。于是,我们的想法是将这 于是, 16个二进制数字的环形 1α2…α16对应一个欧拉有 个二进制数字的环形α 个二进制数字的环形 向路,使其边依次为 向路,使其边依次为α1α2α3α4,α2α3α4α5, α3α4α5α6, …(图7.4.7)。 ( )。
定理7.4.3 定理
一个连通有向图具有(有向)欧拉回 一个连通有向图具有(有向)
路的充要条件是图中每个结点的入度等于出度。 路的充要条件是图中每个结点的入度等于出度 。 一 个连通有向图具有有向欧拉路的充要条件是最多除两 个结点外的每个结点的入度等于出度, 个结点外的每个结点的入度等于出度 , 但在这两个 结点中, 一个结点的入度比出度大 , 另一个结点的 结点中, 一个结点的入度比出度大1, 入度比出度少1。 入度比出度少 。 下面举一个有趣的例子是计算机鼓轮的设计。 下面举一个有趣的例子是计算机鼓轮的设计。
材料力学第7章第二部分

弯曲
梁的计算简图:梁轴线代替梁,将荷载和支座加到 轴线上。
载荷的简化: 集中荷载,集中力偶,分布荷载
第7章 7-1 梁的内力 剪力与弯矩 梁的支承的简化
弯曲ห้องสมุดไป่ตู้
一端是固定铰支约束,另一 端可动铰支约束,为简支梁
简支梁的计算简图
第7章 7-1 梁的内力 剪力与弯矩 梁的支承的简化
弯曲
一端为固定约束,另一端自 由,即没有约束,为悬臂梁
7-2 剪力图与弯矩图 F s y F s y ( x ) 剪力方程 M z M z ( x ) 弯矩方程
第7章 弯曲
7-2 剪力图与弯矩图 F s y F s y ( x ) 剪力方程
剪力图
M z M z(x)
弯矩方程
弯矩图
步骤:沿坐标为x的横截面将梁截开,取出其中一段,分 别应用力的平衡方程和力矩的平衡方程,即可得到剪力 FQ(x)和弯矩M(x)的表达式,即剪力方程FQ(x)和弯矩方程 M(x)。 练习: 确定图中所示梁的剪力 方程和弯矩方程矩图。
Mc 0 M z 2 2.5 2 1.5 2 1 2kN m
第7章 弯曲
7-2 剪力图与弯矩图 1)内力方程:梁横截面上的剪力和弯矩是随截面的位置而变 化的,描述这种变化的数学表达式
Fs y Fs y ( x ) M z M z ( x)
M=0
FSy x =qx FRA=qx-
qlx qx 2 M x = - 2 2
ql 2
0 x l
0 x l
第7章 3) 确定剪力方程和弯矩方程
弯曲
解:
ql Fs y ( x ) qx 2 (0 x l )
离散数学 第7章 图论
v2 v3
v4
v3
(b) 图G
v3 (c) 图G’
(a) 完全图K5
图G是图G’ 相对于图K5的补图。 图G’不是图G 相对于图K5的补图。(图G’中有结点v5 )
例:276页图7-1.7 图(c)是图(b)相对于图(a)的补图。 图(b)不是图(c)相对于图(a)的补图。
25
7-1
图的同构
图的基本概念
8
7-1
图的基本概念
1.无向图:每条边均为无向边的图称为无向图。 2.有向图:每条边均为有向边的图称为有向图。 3.混合图:有些边是无向边,有些边是有向边的图称 为混合图。
v1 (孤立点) v5 V1’
v1 v2
v2
v4 v3 (a)无向图
V2’
V3’ (b)有向图 V4’
v4 v3 ( c ) 混合图
17
7-1
图的基本概念
三、特殊的图
定义4 含有平行边的图称为多重图。 不含平行边和环的图称为简单图。
定义5 简单图G=<V,E>中,若每一对结点间均有边 相连,则称该图为完全图。
无向完全图:每一条边都是无向边 不含有平行边和环 每一对结点间都有边相连
有n个结点的无向完全图记为Kn。
18
7-1
图的基本概念
推论 在一个具有n个结点的图中,如果从结点vj 到结点vk存在一条路,则从结点vj到结点vk 必存在一条边数小于n的通路。
32
7-2
路与回路
定理7-2.1的证明 如果从结点vj到vk存在一条路,该路上的结点序列 是vj…vi…vk,如果在这条中有l条边,则序列中必有 l+1个结点,若l>n-1,则必有结点vs,它在序列中不止 出现一次,即必有结点序列vj…vs…vs…vk,在路中去 掉从vs到vs的这些边,仍是vj到vk的一条路,但此路比 原来的路边数要少,如此重复进行下去,必可得到一 条从vj到vk的不多于n-1条边的路。
第7章_平面交叉口管理

2、识别距离
识别距离:驾驶员应在交叉口之前的一定 距离能识别交叉口的存在及交通信号和交 通标志,这一距离称为识别距离。 (1)、无信号控制的交叉口 可采用停车视距 (2)、有信号控制的交叉口
二、交叉口的转弯设计
1、转弯曲线设计中所采用的设计车型及行驶速 度 设计车型:以16m总长的鞍式列车
左转弯曲线:采用5~15km/h的行驶速度;
纵向标线设置——车行道宽度渐变段标线
纵向标线设置——车种专用车道线
专用车道线由黄色虚线和白色文字组成,实线 长400cm,间隔400cm。线宽20~25cm。 文字字高250cm,宽100cm。
纵向标线设置——接近障碍物标线
纵向标线设置——禁止变换车道线
纵向标线设置——禁止路边停放车辆线
纵向标线设置——禁止路边停放车辆线
指示标志设计
指示车辆行驶方向的标志
靠路侧行驶的标志-设置在车辆需靠
左侧或右侧行驶的入口处
单行路标志
指示标志设计
专用道标志
设置在专用道的起点位置及各交叉口的出口位置
车道行驶方向标志
指示标志设计
人行横道标志
允许调头标志
车道变化标志
指路标志设计
指路标志设计
交叉口预告
距交叉口前300~500m
十字交叉口
3) 两相交公路的交通量虽未达到上述程度, 但由于有相当数量的行人和非机动车穿 越交叉而引起交通延误,甚至阻塞以及 交通事故时,应设置信号。 4) 环形交叉的某些入口因交通量大而会出 现过多的交通延误时,应设置信号。
交叉口的类型及其适用范围
平面交叉按其构造组成分为渠化交叉和非 渠化交叉 。 渠化交通:在行车道上划线,或用绿带和 交通岛来分隔车流,使各种不同类型和不同 速度的车辆沿规定的方向互不干扰地行驶。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第7章 图一、选择题1C 2B 3B 4C 5C 6B 7A 8C 9D 10B 11C 12D 13A 14A 15D 16A 17A 18(C ,BDE ) 19AB 20B 21(C,A,B,A) 22A 23A 24D 25A 26A 27B 28D 29B 30A 31C 32B 二、填空题1邻接矩阵 邻接表 深度优先 广度优先 2出度 3 n 4 O(n 2) 5 O(n+e) 6 邻接表 7邻接矩阵 8有向 9将邻接矩阵的第i 行全部置为0 10不是 11 O(n 2) O(n+e) 12 O(n 2) O(n+e) 13小或等于 14 O(n 2) O(elog2e) 15克鲁斯卡尔(Kruskal) 16普里姆(Prim)17递增 18 019.有n 个顶点,n-1条边的无向连通图 20.有向图的极大强连通子图 21. 生成树22. 45 23. n(n-1)/2 24 . ni d 121 25. 9 26. n 27. 2(n-1) 28. N-1 29. n-130. n 31. N-1 32. n 33. N34. 3 35. 2(N-1) 36. 度 出度 37. 第I 列非零元素个数 38.n 2e39.(1)查找顶点的邻接点的过程 (2)O(n+e) (3)O(n+e) (4)访问顶点的顺序不同 (5)队列和栈 40. 深度优先 41.宽度优先遍历 42.队列 三、简答题1.邻接矩阵 0 0 0 0 0 0 1 0 0 1 0 0 0 1 0 0 0 1 0 0 1 0 1 1 1 0 0 0 0 0 1 11邻接表、逆邻接表略。
2. (1)从a 出发,ac,ab,bd,dh,dg,gf,fe (2)fg,ac,fe,ab,dh3.(1)从A 出发,AE,EF,EB,BC,CG,GD (2)略(3)略(2)Kruskal算法步骤1:①②③――④⑤⑥⑦⑧步骤2:①②③――④⑤――⑥⑦⑧步骤3:①②③――④⑤――⑥⑦――⑧步骤4:①②③――④⑤――⑥――⑧――⑦步骤5:①――②④――③⑤――⑥――⑧――⑦步骤6:①――②――④――③⑤――⑥――⑧――⑦步骤7:①――②――④――⑤――⑥――⑧――⑦|___③5. 解答:先令VE(0)=0,然后根据公式 VE(J)=MAX(VE(I)+DUT(<I,J>) 算每个事件的最早开始时间然后,令VL(N-1)=VE(N-1),即VL(10)=VE(10)=45,根据VL(I)=MIN(VL(J)-DUT(<I,J>)算每个事件的最晚开始时间再根据公式 E(I)=VE(J), L(I)=VL(K)-DUT(<J,K>) 算下面的结果若E(I)=L(I),则该活动为关键活动,则有:关键路径是:1→3→4→9→10(2)过程如下图中虚线表示在时间上前后工序之间仅是接 续顺序关系不存在依赖关系。
顶点代表事件,弧 代表活动,弧上的权代表活动持续时间。
题中顶点1代表工程开始事件,顶点11代表工程结束事件。
(2)各事件发生的最早和最晚时间如下表事件序列:A->C->E->G->H->L->M ,完成工程所需的最短时间为445。
四、程序分析填空及算法设计题1 ①FirstAdjVex(g,v) ②visited[p]_ ③NextAdjVex(g,v,p)_2 ①EnQueue(Q,v); ②DeQueue(Q) ③p=p->adjvex3.void CreatGraph (AdjList g)//建立有n个顶点和m 条边的无向图的邻接表存储结构{int n,m; scanf("%d%d",&n,&m);for (i =1,i<=n;i++)//输入顶点信息,建立顶点向量{scanf(&g[i].vertex); g[i].firstarc=null;}for (k=1;k<=m;k++)//输入边信息{scanf(&v1,&v2);//输入两个顶点i=GraphLocateVertex (g,v1); j=GraphLocateVertex (g,v2); //顶点定位p=(ArcNode *)malloc(sizeof(ArcNode));//申请边结点p->adjvex=j; p->next=g[i].firstarc; g[i].firstarc=p;//将边结点链入p=(ArcNode *)malloc(sizeof(ArcNode));p->adjvex=i; p->next=g[j].firstarc; g[j].frstarc=p;}}//算法CreatGraph结束4. [题目分析] 地图涂色问题可以用“四染色“定理。
将地图上的国家编号(1到n),从编号1开始逐一涂色,对每个区域用1色,2色,3色,4色(下称“色数”)依次试探,若当前所取颜色与周围已涂色区域不重色,则将该区域颜色进栈;否则,用下一颜色。
若1至4色均与相邻某区域重色,则需退栈回溯,修改栈顶区域的颜色。
用邻接矩阵数据结构C[n][n]描叙地图上国家间的关系。
n个国家用n阶方阵表示,若第i个国家与第j个国家相邻,则C ij=1,否则C ij=0。
用栈s记录染色结果,栈的下标值为区域号,元素值是色数。
void MapColor(AdjMatrix C)//以邻接矩阵C表示的n个国家的地区涂色{int s[]; //栈的下标是国家编号,内容是色数s[1]=1; //编号01的国家涂1色i=2;j=1; //i为国家号,j为涂色号while (i<=n){while (j<=4 && i<=n){k=1; //k指已涂色区域号while (k<i && s[k]*C[i][k]!=j) k++; //判相邻区是否已涂色if (k<i) j=j+1; //用j+1色继续试探else {s[i]=j;i++;j=1;}//与相邻区不重色,涂色结果进栈,继续对下一区涂色进行试探 }}//while (j<=4 && i<=n)if (j>4) {i--; j=s[i]+1;} //变更栈顶区域的颜色。
}//while }//结束MapColor5. void CreatOrthList(OrthList g)//建立有向图的十字链表存储结构{int i,j,v; //假定权值为整型 scanf("%d",&n);for(i=1,i<=n;i++) //建立顶点向量{ scanf(&g[i].vertex); g[i].firstin=null; g[i].firstout=null;}scanf("%d%d%d",&i,&j,&v);while (i && j && v) //当输入i,j,v之一为0时,结束算法运行{p=(OrArcNode *)malloc(sizeof(OrArcNode)); //申请结点p->headvex=j; p->tailvex=i; p->weight=v; //弧结点中权值域p->headlink=g[j].firstin; g[j].firstin=p;p->tailink=g[i].firstout; g[i].firstout=p;scanf("%d%d%d",&i,&j,&v);} }算法结束[算法讨论] 本题已假定输入的i和j是顶点号,否则,顶点的信息要输入,且用顶点定位函数求出顶点在顶点向量中的下标。
图建立时,若已知边数(如上面1和2题),可以用for循环;若不知边数,可用while循环(如本题),规定输入特殊数(如本题的零值)时结束运行。
本题中数值设为整型,否则应以和数值类型相容的方式输入。
6.[题目分析] 在有向图中,判断顶点Vi和顶点Vj间是否有路径,可采用遍历的方法,从顶点Vi出发,不论是深度优先遍历(dfs)还是宽度优先遍历(bfs),在未退出dfs或bfs前,若访问到Vj,则说明有通路,否则无通路。
设一全程变量flag。
初始化为0,若有通路,则flag=1。
算法1:int visited[]=0; //全局变量,访问数组初始化int dfs(AdjList g , vi)//以邻接表为存储结构的有向图g,判断顶点Vi到Vj是否有通路,返回1或0表示有或无 { visited[vi]=1; //visited是访问数组,设顶点的信息就是顶点编号。
p=g[vi].firstarc; //第一个邻接点。
while ( p!=null){ j=p->adjvex;if (vj==j) { flag=1; return(1);} //vi 和 vj 有通路。
if (visited[j]==0) dfs(g,j);p=p->next; }//whileif (!flag) return(0);}//结束[算法讨论] 若顶点vi和vj 不是编号,必须先用顶点定位函数,查出其在邻接表顶点向量中的下标i 和j。
下面算法2输出vi 到 vj的路径,其思想是用一个栈存放遍历的顶点,遇到顶点vj时输出路径。
7. void DeleteArc(AdjList g,vertype vi,vj)//删除以邻接表存储的有向图g的一条弧<vi,vj>,假定顶点vi和vj存在{i=GraphLocateVertex(g,vi); j=GraphLocateVertex(g,vj); //顶点定位p=g[i].firstarc; pre=null;while (p)if (p->adjvex==j){if(pre==null) g[i].firstarc=p->next;else pre->next=p->next;free(p);}//释放结点空间。
else { pre=p; p=p->next;}}//结束8. void Traver(AdjList g,vertype v)//图g以邻接表为存储结构,算法从顶点v开始实现非递归深度优先遍历。
{struct arc *stack[];visited[v]=1;printf(v); //输出顶点vtop=0; p=g[v].firstarc; stack[++top]=p;while(top>0 || p!=null){while (p)if (p && visited[p->adjvex]) p=p->next;else {printf(p->adjvex); visited[p->adjvex]=1;stack[++top]=p; p=g[p->adjvex].firstarc;}//elseif (top>0) {p=stack[top--]; p=p->next; }}//while }//算法结束。