Fast marching to moving object location
基于抛弃-捡拾法的多机器人动态任务分配

数 量 的信 息 丢 失 时 如何 快 速 的 恢 复 . 以及 机 器 人 团 队 如 何 _ 最 送 出 去 . 此就 抛 弃 这 个 任 务 而 寻 找 其 它 任 务 去 了 . 它 空 闲 并 【 = } j 从 其 短 的时 间 完成 任务 等 满 足 任 务条 件的 机 器人 都 会 向任 务 的方 向移 动 .最 先 到 达 的 机
说 明 抛 弃一 拾 法在 低 通 讯 量 方 面 具 有 明 显 的优 势 。 捡 【 关键 词 】 机 器人 ; 态任 务 分 配 ; 弃 一 拾 法 : 动 抛 捡
l 引 言 、
要 求 对 于 隐 蔽性 任 务 的 执 行 是 很 重 要 的 ) .并 且 要 求 快 速 的相
机器 人 算 法 研 究尤 其是 机器 人 动 态 任 务 分 配 算 法 逐 渐 成 为 应 但 是 根据 上 面 对 于 已有 算 法 的分 析 可 知都 无 法 满 足 我 们 的 了研 究 热 点 . 效 的 算 法 对 于 机 器人 任 务 的执 行是 至关 重 要 的 . 需 要 。因 此 根据 任 务 需 要设 计 了新 的动 态 任 务 分配 算 法 。 高 是 体 现 机 器 人 性 能 的重 要 标 志 许 多 研 究 者 在 这 方 面 作 出 了很 本 文 介 绍 的 抛 弃 一 拾 法 f b n o e — n e a ig其 实 是 一 捡 A a d n d u d  ̄ kn ) 多 贡 献 . 自然 也 产 生 了许 多 实 用 和 经 典 的 算 法 . 如 :ak 的 种 原 理 十 分 简单 的 分 配 算 法 。 归 类 于 散播 激 活 法 ( P re ・ 应 在这 种方 法 , A LAN E1 eky和 Ma r L I C fG re ’ 、 ti a c的 MU D C p 以及 贪 婪 算 法 中 ,机 器人 选 择 某 个 任 务后 直接 抑 制 周 围其 他 机 器 人 的 行 为 ) R O Ht , ,
Native Instruments MASCHINE MK3 用户手册说明书

The information in this document is subject to change without notice and does not represent a commitment on the part of Native Instruments GmbH. The software described by this docu-ment is subject to a License Agreement and may not be copied to other media. No part of this publication may be copied, reproduced or otherwise transmitted or recorded, for any purpose, without prior written permission by Native Instruments GmbH, hereinafter referred to as Native Instruments.“Native Instruments”, “NI” and associated logos are (registered) trademarks of Native Instru-ments GmbH.ASIO, VST, HALion and Cubase are registered trademarks of Steinberg Media Technologies GmbH.All other product and company names are trademarks™ or registered® trademarks of their re-spective holders. Use of them does not imply any affiliation with or endorsement by them.Document authored by: David Gover and Nico Sidi.Software version: 2.8 (02/2019)Hardware version: MASCHINE MK3Special thanks to the Beta Test Team, who were invaluable not just in tracking down bugs, but in making this a better product.NATIVE INSTRUMENTS GmbH Schlesische Str. 29-30D-10997 Berlin Germanywww.native-instruments.de NATIVE INSTRUMENTS North America, Inc. 6725 Sunset Boulevard5th FloorLos Angeles, CA 90028USANATIVE INSTRUMENTS K.K.YO Building 3FJingumae 6-7-15, Shibuya-ku, Tokyo 150-0001Japanwww.native-instruments.co.jp NATIVE INSTRUMENTS UK Limited 18 Phipp StreetLondon EC2A 4NUUKNATIVE INSTRUMENTS FRANCE SARL 113 Rue Saint-Maur75011 ParisFrance SHENZHEN NATIVE INSTRUMENTS COMPANY Limited 5F, Shenzhen Zimao Center111 Taizi Road, Nanshan District, Shenzhen, GuangdongChina© NATIVE INSTRUMENTS GmbH, 2019. All rights reserved.Table of Contents1Welcome to MASCHINE (25)1.1MASCHINE Documentation (26)1.2Document Conventions (27)1.3New Features in MASCHINE 2.8 (29)1.4New Features in MASCHINE 2.7.10 (31)1.5New Features in MASCHINE 2.7.8 (31)1.6New Features in MASCHINE 2.7.7 (32)1.7New Features in MASCHINE 2.7.4 (33)1.8New Features in MASCHINE 2.7.3 (36)2Quick Reference (38)2.1Using Your Controller (38)2.1.1Controller Modes and Mode Pinning (38)2.1.2Controlling the Software Views from Your Controller (40)2.2MASCHINE Project Overview (43)2.2.1Sound Content (44)2.2.2Arrangement (45)2.3MASCHINE Hardware Overview (48)2.3.1MASCHINE Hardware Overview (48)2.3.1.1Control Section (50)2.3.1.2Edit Section (53)2.3.1.3Performance Section (54)2.3.1.4Group Section (56)2.3.1.5Transport Section (56)2.3.1.6Pad Section (58)2.3.1.7Rear Panel (63)2.4MASCHINE Software Overview (65)2.4.1Header (66)2.4.2Browser (68)2.4.3Arranger (70)2.4.4Control Area (73)2.4.5Pattern Editor (74)3Basic Concepts (76)3.1Important Names and Concepts (76)3.2Adjusting the MASCHINE User Interface (79)3.2.1Adjusting the Size of the Interface (79)3.2.2Switching between Ideas View and Song View (80)3.2.3Showing/Hiding the Browser (81)3.2.4Showing/Hiding the Control Lane (81)3.3Common Operations (82)3.3.1Using the 4-Directional Push Encoder (82)3.3.2Pinning a Mode on the Controller (83)3.3.3Adjusting Volume, Swing, and Tempo (84)3.3.4Undo/Redo (87)3.3.5List Overlay for Selectors (89)3.3.6Zoom and Scroll Overlays (90)3.3.7Focusing on a Group or a Sound (91)3.3.8Switching Between the Master, Group, and Sound Level (96)3.3.9Navigating Channel Properties, Plug-ins, and Parameter Pages in the Control Area.973.3.9.1Extended Navigate Mode on Your Controller (102)3.3.10Navigating the Software Using the Controller (105)3.3.11Using Two or More Hardware Controllers (106)3.3.12Touch Auto-Write Option (108)3.4Native Kontrol Standard (110)3.5Stand-Alone and Plug-in Mode (111)3.5.1Differences between Stand-Alone and Plug-in Mode (112)3.5.2Switching Instances (113)3.5.3Controlling Various Instances with Different Controllers (114)3.6Host Integration (114)3.6.1Setting up Host Integration (115)3.6.1.1Setting up Ableton Live (macOS) (115)3.6.1.2Setting up Ableton Live (Windows) (116)3.6.1.3Setting up Apple Logic Pro X (116)3.6.2Integration with Ableton Live (117)3.6.3Integration with Apple Logic Pro X (119)3.7Preferences (120)3.7.1Preferences – General Page (121)3.7.2Preferences – Audio Page (126)3.7.3Preferences – MIDI Page (130)3.7.4Preferences – Default Page (133)3.7.5Preferences – Library Page (137)3.7.6Preferences – Plug-ins Page (145)3.7.7Preferences – Hardware Page (150)3.7.8Preferences – Colors Page (154)3.8Integrating MASCHINE into a MIDI Setup (156)3.8.1Connecting External MIDI Equipment (156)3.8.2Sync to External MIDI Clock (157)3.8.3Send MIDI Clock (158)3.9Syncing MASCHINE using Ableton Link (159)3.9.1Connecting to a Network (159)3.9.2Joining and Leaving a Link Session (159)3.10Using a Pedal with the MASCHINE Controller (160)3.11File Management on the MASCHINE Controller (161)4Browser (163)4.1Browser Basics (163)4.1.1The MASCHINE Library (163)4.1.2Browsing the Library vs. Browsing Your Hard Disks (164)4.2Searching and Loading Files from the Library (165)4.2.1Overview of the Library Pane (165)4.2.2Selecting or Loading a Product and Selecting a Bank from the Browser (170)4.2.2.1[MK3] Browsing by Product Category Using the Controller (174)4.2.2.2[MK3] Browsing by Product Vendor Using the Controller (174)4.2.3Selecting a Product Category, a Product, a Bank, and a Sub-Bank (175)4.2.3.1Selecting a Product Category, a Product, a Bank, and a Sub-Bank on theController (179)4.2.4Selecting a File Type (180)4.2.5Choosing Between Factory and User Content (181)4.2.6Selecting Type and Character Tags (182)4.2.7List and Tag Overlays in the Browser (186)4.2.8Performing a Text Search (188)4.2.9Loading a File from the Result List (188)4.3Additional Browsing Tools (193)4.3.1Loading the Selected Files Automatically (193)4.3.2Auditioning Instrument Presets (195)4.3.3Auditioning Samples (196)4.3.4Loading Groups with Patterns (197)4.3.5Loading Groups with Routing (198)4.3.6Displaying File Information (198)4.4Using Favorites in the Browser (199)4.5Editing the Files’ Tags and Properties (203)4.5.1Attribute Editor Basics (203)4.5.2The Bank Page (205)4.5.3The Types and Characters Pages (205)4.5.4The Properties Page (208)4.6Loading and Importing Files from Your File System (209)4.6.1Overview of the FILES Pane (209)4.6.2Using Favorites (211)4.6.3Using the Location Bar (212)4.6.4Navigating to Recent Locations (213)4.6.5Using the Result List (214)4.6.6Importing Files to the MASCHINE Library (217)4.7Locating Missing Samples (219)4.8Using Quick Browse (221)5Managing Sounds, Groups, and Your Project (225)5.1Overview of the Sounds, Groups, and Master (225)5.1.1The Sound, Group, and Master Channels (226)5.1.2Similarities and Differences in Handling Sounds and Groups (227)5.1.3Selecting Multiple Sounds or Groups (228)5.2Managing Sounds (233)5.2.1Loading Sounds (235)5.2.2Pre-listening to Sounds (236)5.2.3Renaming Sound Slots (237)5.2.4Changing the Sound’s Color (237)5.2.5Saving Sounds (239)5.2.6Copying and Pasting Sounds (241)5.2.7Moving Sounds (244)5.2.8Resetting Sound Slots (245)5.3Managing Groups (247)5.3.1Creating Groups (248)5.3.2Loading Groups (249)5.3.3Renaming Groups (251)5.3.4Changing the Group’s Color (251)5.3.5Saving Groups (253)5.3.6Copying and Pasting Groups (255)5.3.7Reordering Groups (258)5.3.8Deleting Groups (259)5.4Exporting MASCHINE Objects and Audio (260)5.4.1Saving a Group with its Samples (261)5.4.2Saving a Project with its Samples (262)5.4.3Exporting Audio (264)5.5Importing Third-Party File Formats (270)5.5.1Loading REX Files into Sound Slots (270)5.5.2Importing MPC Programs to Groups (271)6Playing on the Controller (275)6.1Adjusting the Pads (275)6.1.1The Pad View in the Software (275)6.1.2Choosing a Pad Input Mode (277)6.1.3Adjusting the Base Key (280)6.1.4Using Choke Groups (282)6.1.5Using Link Groups (284)6.2Adjusting the Key, Choke, and Link Parameters for Multiple Sounds (286)6.3Playing Tools (287)6.3.1Mute and Solo (288)6.3.2Choke All Notes (292)6.3.3Groove (293)6.3.4Level, Tempo, Tune, and Groove Shortcuts on Your Controller (295)6.3.5Tap Tempo (299)6.4Performance Features (300)6.4.1Overview of the Perform Features (300)6.4.2Selecting a Scale and Creating Chords (303)6.4.3Scale and Chord Parameters (303)6.4.4Creating Arpeggios and Repeated Notes (316)6.4.5Swing on Note Repeat / Arp Output (321)6.5Using Lock Snapshots (322)6.5.1Creating a Lock Snapshot (322)6.5.2Using Extended Lock (323)6.5.3Updating a Lock Snapshot (323)6.5.4Recalling a Lock Snapshot (324)6.5.5Morphing Between Lock Snapshots (324)6.5.6Deleting a Lock Snapshot (325)6.5.7Triggering Lock Snapshots via MIDI (326)6.6Using the Smart Strip (327)6.6.1Pitch Mode (328)6.6.2Modulation Mode (328)6.6.3Perform Mode (328)6.6.4Notes Mode (329)7Working with Plug-ins (330)7.1Plug-in Overview (330)7.1.1Plug-in Basics (330)7.1.2First Plug-in Slot of Sounds: Choosing the Sound’s Role (334)7.1.3Loading, Removing, and Replacing a Plug-in (335)7.1.3.1Browser Plug-in Slot Selection (341)7.1.4Adjusting the Plug-in Parameters (344)7.1.5Bypassing Plug-in Slots (344)7.1.6Using Side-Chain (346)7.1.7Moving Plug-ins (346)7.1.8Alternative: the Plug-in Strip (348)7.1.9Saving and Recalling Plug-in Presets (348)7.1.9.1Saving Plug-in Presets (349)7.1.9.2Recalling Plug-in Presets (350)7.1.9.3Removing a Default Plug-in Preset (351)7.2The Sampler Plug-in (352)7.2.1Page 1: Voice Settings / Engine (354)7.2.2Page 2: Pitch / Envelope (356)7.2.3Page 3: FX / Filter (359)7.2.4Page 4: Modulation (361)7.2.5Page 5: LFO (363)7.2.6Page 6: Velocity / Modwheel (365)7.3Using Native Instruments and External Plug-ins (367)7.3.1Opening/Closing Plug-in Windows (367)7.3.2Using the VST/AU Plug-in Parameters (370)7.3.3Setting Up Your Own Parameter Pages (371)7.3.4Using VST/AU Plug-in Presets (376)7.3.5Multiple-Output Plug-ins and Multitimbral Plug-ins (378)8Using the Audio Plug-in (380)8.1Loading a Loop into the Audio Plug-in (384)8.2Editing Audio in the Audio Plug-in (385)8.3Using Loop Mode (386)8.4Using Gate Mode (388)9Using the Drumsynths (390)9.1Drumsynths – General Handling (391)9.1.1Engines: Many Different Drums per Drumsynth (391)9.1.2Common Parameter Organization (391)9.1.3Shared Parameters (394)9.1.4Various Velocity Responses (394)9.1.5Pitch Range, Tuning, and MIDI Notes (394)9.2The Kicks (395)9.2.1Kick – Sub (397)9.2.2Kick – Tronic (399)9.2.3Kick – Dusty (402)9.2.4Kick – Grit (403)9.2.5Kick – Rasper (406)9.2.6Kick – Snappy (407)9.2.7Kick – Bold (409)9.2.8Kick – Maple (411)9.2.9Kick – Push (412)9.3The Snares (414)9.3.1Snare – Volt (416)9.3.2Snare – Bit (418)9.3.3Snare – Pow (420)9.3.4Snare – Sharp (421)9.3.5Snare – Airy (423)9.3.6Snare – Vintage (425)9.3.7Snare – Chrome (427)9.3.8Snare – Iron (429)9.3.9Snare – Clap (431)9.3.10Snare – Breaker (433)9.4The Hi-hats (435)9.4.1Hi-hat – Silver (436)9.4.2Hi-hat – Circuit (438)9.4.3Hi-hat – Memory (440)9.4.4Hi-hat – Hybrid (442)9.4.5Creating a Pattern with Closed and Open Hi-hats (444)9.5The Toms (445)9.5.1Tom – Tronic (447)9.5.2Tom – Fractal (449)9.5.3Tom – Floor (453)9.5.4Tom – High (455)9.6The Percussions (456)9.6.1Percussion – Fractal (458)9.6.2Percussion – Kettle (461)9.6.3Percussion – Shaker (463)9.7The Cymbals (467)9.7.1Cymbal – Crash (469)9.7.2Cymbal – Ride (471)10Using the Bass Synth (474)10.1Bass Synth – General Handling (475)10.1.1Parameter Organization (475)10.1.2Bass Synth Parameters (477)11Working with Patterns (479)11.1Pattern Basics (479)11.1.1Pattern Editor Overview (480)11.1.2Navigating the Event Area (486)11.1.3Following the Playback Position in the Pattern (488)11.1.4Jumping to Another Playback Position in the Pattern (489)11.1.5Group View and Keyboard View (491)11.1.6Adjusting the Arrange Grid and the Pattern Length (493)11.1.7Adjusting the Step Grid and the Nudge Grid (497)11.2Recording Patterns in Real Time (501)11.2.1Recording Your Patterns Live (501)11.2.2The Record Prepare Mode (504)11.2.3Using the Metronome (505)11.2.4Recording with Count-in (506)11.2.5Quantizing while Recording (508)11.3Recording Patterns with the Step Sequencer (508)11.3.1Step Mode Basics (508)11.3.2Editing Events in Step Mode (511)11.3.3Recording Modulation in Step Mode (513)11.4Editing Events (514)11.4.1Editing Events with the Mouse: an Overview (514)11.4.2Creating Events/Notes (517)11.4.3Selecting Events/Notes (518)11.4.4Editing Selected Events/Notes (526)11.4.5Deleting Events/Notes (532)11.4.6Cut, Copy, and Paste Events/Notes (535)11.4.7Quantizing Events/Notes (538)11.4.8Quantization While Playing (540)11.4.9Doubling a Pattern (541)11.4.10Adding Variation to Patterns (541)11.5Recording and Editing Modulation (546)11.5.1Which Parameters Are Modulatable? (547)11.5.2Recording Modulation (548)11.5.3Creating and Editing Modulation in the Control Lane (550)11.6Creating MIDI Tracks from Scratch in MASCHINE (555)11.7Managing Patterns (557)11.7.1The Pattern Manager and Pattern Mode (558)11.7.2Selecting Patterns and Pattern Banks (560)11.7.3Creating Patterns (563)11.7.4Deleting Patterns (565)11.7.5Creating and Deleting Pattern Banks (566)11.7.6Naming Patterns (568)11.7.7Changing the Pattern’s Color (570)11.7.8Duplicating, Copying, and Pasting Patterns (571)11.7.9Moving Patterns (574)11.7.10Adjusting Pattern Length in Fine Increments (575)11.8Importing/Exporting Audio and MIDI to/from Patterns (576)11.8.1Exporting Audio from Patterns (576)11.8.2Exporting MIDI from Patterns (577)11.8.3Importing MIDI to Patterns (580)12Audio Routing, Remote Control, and Macro Controls (589)12.1Audio Routing in MASCHINE (590)12.1.1Sending External Audio to Sounds (591)12.1.2Configuring the Main Output of Sounds and Groups (596)12.1.3Setting Up Auxiliary Outputs for Sounds and Groups (601)12.1.4Configuring the Master and Cue Outputs of MASCHINE (605)12.1.5Mono Audio Inputs (610)12.1.5.1Configuring External Inputs for Sounds in Mix View (611)12.2Using MIDI Control and Host Automation (614)12.2.1Triggering Sounds via MIDI Notes (615)12.2.2Triggering Scenes via MIDI (622)12.2.3Controlling Parameters via MIDI and Host Automation (623)12.2.4Selecting VST/AU Plug-in Presets via MIDI Program Change (631)12.2.5Sending MIDI from Sounds (632)12.3Creating Custom Sets of Parameters with the Macro Controls (636)12.3.1Macro Control Overview (637)12.3.2Assigning Macro Controls Using the Software (638)12.3.3Assigning Macro Controls Using the Controller (644)13Controlling Your Mix (646)13.1Mix View Basics (646)13.1.1Switching between Arrange View and Mix View (646)13.1.2Mix View Elements (647)13.2The Mixer (649)13.2.1Displaying Groups vs. Displaying Sounds (650)13.2.2Adjusting the Mixer Layout (652)13.2.3Selecting Channel Strips (653)13.2.4Managing Your Channels in the Mixer (654)13.2.5Adjusting Settings in the Channel Strips (656)13.2.6Using the Cue Bus (660)13.3The Plug-in Chain (662)13.4The Plug-in Strip (663)13.4.1The Plug-in Header (665)13.4.2Panels for Drumsynths and Internal Effects (667)13.4.3Panel for the Sampler (668)13.4.4Custom Panels for Native Instruments Plug-ins (671)13.4.5Undocking a Plug-in Panel (Native Instruments and External Plug-ins Only) (675)13.5Controlling Your Mix from the Controller (677)13.5.1Navigating Your Channels in Mix Mode (678)13.5.2Adjusting the Level and Pan in Mix Mode (679)13.5.3Mute and Solo in Mix Mode (680)13.5.4Plug-in Icons in Mix Mode (680)14Using Effects (681)14.1Applying Effects to a Sound, a Group or the Master (681)14.1.1Adding an Effect (681)14.1.2Other Operations on Effects (690)14.1.3Using the Side-Chain Input (692)14.2Applying Effects to External Audio (695)14.2.1Step 1: Configure MASCHINE Audio Inputs (695)14.2.2Step 2: Set up a Sound to Receive the External Input (698)14.2.3Step 3: Load an Effect to Process an Input (700)14.3Creating a Send Effect (701)14.3.1Step 1: Set Up a Sound or Group as Send Effect (702)14.3.2Step 2: Route Audio to the Send Effect (706)14.3.3 A Few Notes on Send Effects (708)14.4Creating Multi-Effects (709)15Effect Reference (712)15.1Dynamics (713)15.1.1Compressor (713)15.1.2Gate (717)15.1.3Transient Master (721)15.1.4Limiter (723)15.1.5Maximizer (727)15.2Filtering Effects (730)15.2.1EQ (730)15.2.2Filter (733)15.2.3Cabinet (737)15.3Modulation Effects (738)15.3.1Chorus (738)15.3.2Flanger (740)15.3.3FM (742)15.3.4Freq Shifter (743)15.3.5Phaser (745)15.4Spatial and Reverb Effects (747)15.4.1Ice (747)15.4.2Metaverb (749)15.4.3Reflex (750)15.4.4Reverb (Legacy) (752)15.4.5Reverb (754)15.4.5.1Reverb Room (754)15.4.5.2Reverb Hall (757)15.4.5.3Plate Reverb (760)15.5Delays (762)15.5.1Beat Delay (762)15.5.2Grain Delay (765)15.5.3Grain Stretch (767)15.5.4Resochord (769)15.6Distortion Effects (771)15.6.1Distortion (771)15.6.2Lofi (774)15.6.3Saturator (775)15.7Perform FX (779)15.7.1Filter (780)15.7.2Flanger (782)15.7.3Burst Echo (785)15.7.4Reso Echo (787)15.7.5Ring (790)15.7.6Stutter (792)15.7.7Tremolo (795)15.7.8Scratcher (798)16Working with the Arranger (801)16.1Arranger Basics (801)16.1.1Navigating Song View (804)16.1.2Following the Playback Position in Your Project (806)16.1.3Performing with Scenes and Sections using the Pads (807)16.2Using Ideas View (811)16.2.1Scene Overview (811)16.2.2Creating Scenes (813)16.2.3Assigning and Removing Patterns (813)16.2.4Selecting Scenes (817)16.2.5Deleting Scenes (818)16.2.6Creating and Deleting Scene Banks (820)16.2.7Clearing Scenes (820)16.2.8Duplicating Scenes (821)16.2.9Reordering Scenes (822)16.2.10Making Scenes Unique (824)16.2.11Appending Scenes to Arrangement (825)16.2.12Naming Scenes (826)16.2.13Changing the Color of a Scene (827)16.3Using Song View (828)16.3.1Section Management Overview (828)16.3.2Creating Sections (833)16.3.3Assigning a Scene to a Section (834)16.3.4Selecting Sections and Section Banks (835)16.3.5Reorganizing Sections (839)16.3.6Adjusting the Length of a Section (840)16.3.6.1Adjusting the Length of a Section Using the Software (841)16.3.6.2Adjusting the Length of a Section Using the Controller (843)16.3.7Clearing a Pattern in Song View (843)16.3.8Duplicating Sections (844)16.3.8.1Making Sections Unique (845)16.3.9Removing Sections (846)16.3.10Renaming Scenes (848)16.3.11Clearing Sections (849)16.3.12Creating and Deleting Section Banks (850)16.3.13Working with Patterns in Song view (850)16.3.13.1Creating a Pattern in Song View (850)16.3.13.2Selecting a Pattern in Song View (850)16.3.13.3Clearing a Pattern in Song View (851)16.3.13.4Renaming a Pattern in Song View (851)16.3.13.5Coloring a Pattern in Song View (851)16.3.13.6Removing a Pattern in Song View (852)16.3.13.7Duplicating a Pattern in Song View (852)16.3.14Enabling Auto Length (852)16.3.15Looping (853)16.3.15.1Setting the Loop Range in the Software (854)16.4Playing with Sections (855)16.4.1Jumping to another Playback Position in Your Project (855)16.5Triggering Sections or Scenes via MIDI (856)16.6The Arrange Grid (858)16.7Quick Grid (860)17Sampling and Sample Mapping (862)17.1Opening the Sample Editor (862)17.2Recording Audio (863)17.2.1Opening the Record Page (863)17.2.2Selecting the Source and the Recording Mode (865)17.2.3Arming, Starting, and Stopping the Recording (868)17.2.5Using the Footswitch for Recording Audio (871)17.2.6Checking Your Recordings (872)17.2.7Location and Name of Your Recorded Samples (876)17.3Editing a Sample (876)17.3.1Using the Edit Page (877)17.3.2Audio Editing Functions (882)17.4Slicing a Sample (890)17.4.1Opening the Slice Page (891)17.4.2Adjusting the Slicing Settings (893)17.4.3Live Slicing (898)17.4.3.1Live Slicing Using the Controller (898)17.4.3.2Delete All Slices (899)17.4.4Manually Adjusting Your Slices (899)17.4.5Applying the Slicing (906)17.5Mapping Samples to Zones (912)17.5.1Opening the Zone Page (912)17.5.2Zone Page Overview (913)17.5.3Selecting and Managing Zones in the Zone List (915)17.5.4Selecting and Editing Zones in the Map View (920)17.5.5Editing Zones in the Sample View (924)17.5.6Adjusting the Zone Settings (927)17.5.7Adding Samples to the Sample Map (934)18Appendix: Tips for Playing Live (937)18.1Preparations (937)18.1.1Focus on the Hardware (937)18.1.2Customize the Pads of the Hardware (937)18.1.3Check Your CPU Power Before Playing (937)18.1.4Name and Color Your Groups, Patterns, Sounds and Scenes (938)18.1.5Consider Using a Limiter on Your Master (938)18.1.6Hook Up Your Other Gear and Sync It with MIDI Clock (938)18.1.7Improvise (938)18.2Basic Techniques (938)18.2.1Use Mute and Solo (938)18.2.2Use Scene Mode and Tweak the Loop Range (939)18.2.3Create Variations of Your Drum Patterns in the Step Sequencer (939)18.2.4Use Note Repeat (939)18.2.5Set Up Your Own Multi-effect Groups and Automate Them (939)18.3Special Tricks (940)18.3.1Changing Pattern Length for Variation (940)18.3.2Using Loops to Cycle Through Samples (940)18.3.3Using Loops to Cycle Through Samples (940)18.3.4Load Long Audio Files and Play with the Start Point (940)19Troubleshooting (941)19.1Knowledge Base (941)19.2Technical Support (941)19.3Registration Support (942)19.4User Forum (942)20Glossary (943)Index (951)1Welcome to MASCHINEThank you for buying MASCHINE!MASCHINE is a groove production studio that implements the familiar working style of classi-cal groove boxes along with the advantages of a computer based system. MASCHINE is ideal for making music live, as well as in the studio. It’s the hands-on aspect of a dedicated instru-ment, the MASCHINE hardware controller, united with the advanced editing features of the MASCHINE software.Creating beats is often not very intuitive with a computer, but using the MASCHINE hardware controller to do it makes it easy and fun. You can tap in freely with the pads or use Note Re-peat to jam along. Alternatively, build your beats using the step sequencer just as in classic drum machines.Patterns can be intuitively combined and rearranged on the fly to form larger ideas. You can try out several different versions of a song without ever having to stop the music.Since you can integrate it into any sequencer that supports VST, AU, or AAX plug-ins, you can reap the benefits in almost any software setup, or use it as a stand-alone application. You can sample your own material, slice loops and rearrange them easily.However, MASCHINE is a lot more than an ordinary groovebox or sampler: it comes with an inspiring 7-gigabyte library, and a sophisticated, yet easy to use tag-based Browser to give you instant access to the sounds you are looking for.What’s more, MASCHINE provides lots of options for manipulating your sounds via internal ef-fects and other sound-shaping possibilities. You can also control external MIDI hardware and 3rd-party software with the MASCHINE hardware controller, while customizing the functions of the pads, knobs and buttons according to your needs utilizing the included Controller Editor application. We hope you enjoy this fantastic instrument as much as we do. Now let’s get go-ing!—The MASCHINE team at Native Instruments.MASCHINE Documentation1.1MASCHINE DocumentationNative Instruments provide many information sources regarding MASCHINE. The main docu-ments should be read in the following sequence:1.MASCHINE Getting Started: This document provides a practical approach to MASCHINE viaa set of tutorials covering easy and more advanced tasks in order to help you familiarizeyourself with MASCHINE.2.MASCHINE Manual (this document): The MASCHINE Manual provides you with a compre-hensive description of all MASCHINE software and hardware features.Additional documentation sources provide you with details on more specific topics:▪Controller Editor Manual: Besides using your MASCHINE hardware controller together withits dedicated MASCHINE software, you can also use it as a powerful and highly versatileMIDI controller to pilot any other MIDI-capable application or device. This is made possibleby the Controller Editor software, an application that allows you to precisely define all MIDIassignments for your MASCHINE controller. The Controller Editor was installed during theMASCHINE installation procedure. For more information on this, please refer to the Con-troller Editor Manual available as a PDF file via the Help menu of Controller Editor.▪Online Support Videos: You can find a number of support videos on The Official Native In-struments Support Channel under the following URL: https:///NIsupport-EN. We recommend that you follow along with these instructions while the respective ap-plication is running on your computer.Other Online Resources:If you are experiencing problems related to your Native Instruments product that the supplied documentation does not cover, there are several ways of getting help:▪Knowledge Base▪User Forum▪Technical Support▪Registration SupportYou will find more information on these subjects in the chapter Troubleshooting.1.2Document ConventionsThis section introduces you to the signage and text highlighting used in this manual. This man-ual uses particular formatting to point out special facts and to warn you of potential issues. The icons introducing these notes let you see what kind of information is to be expected:This document uses particular formatting to point out special facts and to warn you of poten-tial issues. The icons introducing the following notes let you see what kind of information can be expected:Furthermore, the following formatting is used:▪Text appearing in (drop-down) menus (such as Open…, Save as… etc.) in the software and paths to locations on your hard disk or other storage devices is printed in italics.▪Text appearing elsewhere (labels of buttons, controls, text next to checkboxes etc.) in the software is printed in blue. Whenever you see this formatting applied, you will find the same text appearing somewhere on the screen.▪Text appearing on the displays of the controller is printed in light grey. Whenever you see this formatting applied, you will find the same text on a controller display.▪Text appearing on labels of the hardware controller is printed in orange. Whenever you see this formatting applied, you will find the same text on the controller.▪Important names and concepts are printed in bold.▪References to keys on your computer’s keyboard you’ll find put in square brackets (e.g.,“Press [Shift] + [Enter]”).►Single instructions are introduced by this play button type arrow.→Results of actions are introduced by this smaller arrow.Naming ConventionThroughout the documentation we will refer to MASCHINE controller (or just controller) as the hardware controller and MASCHINE software as the software installed on your computer.The term “effect” will sometimes be abbreviated as “FX” when referring to elements in the MA-SCHINE software and hardware. These terms have the same meaning.Button Combinations and Shortcuts on Your ControllerMost instructions will use the “+” sign to indicate buttons (or buttons and pads) that must be pressed simultaneously, starting with the button indicated first. E.g., an instruction such as:“Press SHIFT + PLAY”means:1.Press and hold SHIFT.2.While holding SHIFT, press PLAY and release it.3.Release SHIFT.Unlabeled Buttons on the ControllerThe buttons and knobs above and below the displays on your MASCHINE controller do not have labels.。
marching

marchingMarching Cubes ModuleDescriptionThis module is longer and more complex than many of the other modules.Most of the modules involve using VTK to visualize data.VTK is a general purpose toolkit that supports many di?erent data types and many di?erent algorithms.Its generic visualization pipeline structure allows di?erent algorithms to be pieced together easily. The downside of this is that it is not optimized for any speci?c task and is thus slower and takes more memory to do the same task than an algorithm optimized for a speci?c visualization algorithm.This module examines many of the memory and low-level programming details that VTK hides by having the student develop a complete program for visualizing isosurfaces.Problem StatementThe goal of this module is to develop a complete system that extracts an isosurface from a data set and displays it using OpenGL.This project can easily be split into the two parts:extracting the isosurface and rendering it in an OpenGL window.If the student has previously worked with OpenGL this will be very easy since all it needs to do is open a window and display triangles,ideally rendered with smooth shading, vertex normals,and lighting.Extracting the isosurface using the marching cubes algorithm is straight forward,but actually writing the code and optimizing it is a fair amount of work.IntroductionCompared to many visualization algorithms,the implementation of the marching cubes algorithm is fairly straightforward and relatively simple and short.Because of this it is a good choice for a?rst algorithm that a student implements from scratch.It also can be implemented in a brute force fashion or optimizations to limit memory usage and reduce duplicate computations can be /doc/0f17206767.htmling the OpenGL API,the triangles it produces can be rendered for a complete visualization system in about10-15 pages ofC++code.An optimized version with an advanced viewer that allows viewpoint changes and zooming capabilities can implemented in less than30pages of1code total.Depending on the number of students working together on the project,their expertise in OpenGL,and the amount of time you have,the instructor may provide some of the code for viewing the resulting isosurface.BackgroundThe marching cubes algorithm was originally developed by Lorensen and Cline and published in the1987Siggraph Proceedings(pp.163-169).The VTK book also describes the algorithm.A brief description of the algorithm from the course notes is copied here as the next two pargraphs for convenience.See Figure6-4page159of the VTK book for a two-dimensional example which generates an isoline for a speci?ed value.The two-dimensional algorithm for extracting an isoline is known as marching squares.Figure6-5page160of the VTK book for the 16possible cases(2choices for each of4vertices so24)for an isoline passing through a square.Also note that cases1and14are equivalent(i.e.,it does not matter whether three of the vertices have a value above the isovalue and one below or three of the vertices have a value below the isovalue and one above-these are referred to as complementary cases).And if you allow rotations,cases1,2,4,7,8,11,13,and14are all equivalent.Also note that cases5and10are ambiguous with regard to where the isoline occurs.The extension of this method to three-dimensions is known as marching cubes.In three dimensions thereare256cases(28).Figure6-6page161of the VTK book shows the15 topologically unique cases using the same strategy to reduce the number of two dimensional cases.The three-dimensional case also su?ers from the ambiguity problem and requires handling some of the complementary(where the vertices above the isosurface and below are swapped)cases di? erently.See Figure6-10page164of the VTK book.Implementing the marching cubes algorithm is straightforward but is tedious and error-prone.There are256cases for a voxel since each value at the8voxel vertices can either be above or below the isosurface value.The common approach to implementing the marching cubes algorithm is to generate a256entry lookup table in which each entry speci?es the triangles for that speci?c case.Then as each voxel is processed,the case is determined by calculating the case and getting the trinagles from the lookup table. This table could be produced by hand,but this is one of the areas where errors are likely to be introduced.If the lookup table speci?es the wrong triangles for any one2case,the resulting isosurface(assuming that case occurs)will be wrong.Trying to track these errors down by looking at the image is practically impossible.The only way to?x it is to recheck each of the256entries in the lookup table.Another approach is to enter the15topologically unique cases and information about the triangles for each of the15cases and then write a program that uses this information to generate the256entry lookup table.This is less error prone since fewer entries have to be hand entered,although there is more code to write and debug.This is the approach the module author used and the code for it is in the instructor’s manual.To implement this consider how many di?erent ways you can place a cube down on a?at surface.You may want to take a box and number the vertices from0to 7and experiment with placing the box down on di?erent faces and rotating it.Once you determine,this,you can create a table that speci?es which of the8positions each of the8vertices is in for each of the con?gurations.You will also want to number the edges from0to11and keep track of where each edge is for the con?gurations or just keep track of the two vertices each edge connects.Other information required is which vertices are above the isosurface value for each of the15unique cases and of course,the edges that contain the triangle vertices for each of the cases.Given all this information,a program can be written to generate the256 entry lookup table containing the triangles to generate for each case.A reasonable size for current data sets is256x256x256using2bits per data value.This requires approximately33MB of disk space/memory so it is not unreasonable to load the entire data set into memory and then also create the extracted triangles.AsMRI/CT scanners continue to improve their resoultion,data sets that are1024x1024x1024are expected.With2bits per data value,this is over2GB of data so reading the entire data set into the computer is not realistic.The size of memory will continue to grow,but since the data sets are cubic,the amount of memory needed will increase more quickly.When writing your program,try to minimize the number of slices you store in memory. The vertex location for each triangle is calculated by interpolating the data values at the two vertices where one is above and one below the speci?ed isovalue.As you process each pair of data slices,the“brute force”method of generating the triangles would be to calculate and store the vertices for each triangle;however,each vertex is shared by a number of triangles so ideally you only want to calculate and store the coordinates for each vertex once and reuse it for each triangle that shares it.One of the module questions asks you to examine the relationship between the number of triangles and vertices.3The standard computer graphics data structure for storing a polyhedra is known as a polymesh.It includes an array of points and an array of polygons.Each polygon has an array that indexes the points that form that polygon.Thus,only one integer is required to store each polygon vertex(instead of3?oat/double values)plus the overhead of storing each vertex once.For the marching cubes algorithm,all the polygons are triangles so there is no need to store the number of vertices in each polygon.Other information that is often stored is a normal for each polygon and a“vertex normal”. The vertex normal is the average normal for all the polygons shared by that polygon. The normal for each triangle can be calculated using the cross product of two edges and then normalize the result.For each vertex,set the vertex normal to zero and then add all the normals for each polygon using that vertex and normalize the total.For lighting purpose,you will want to be consistent in specifying the vertex order for your triangles in the lookup table so that the vertices for a triangle are always specifed in clockwise or counter-clockwise order.This allows the normals to be calculated so that the normal is always“outward facing”for each triangle.Once all the triangles have been calculated along with vertex normals,we need to display the results.Currently,the most common graphics API is OpenGL.The simplest method for creating an interface for an OpenGL window is GLUT(GL Utility Toolkit).This was originally developed by SGI and there is now an open source version known as“freeglut”.Your instructor will let you know how to create an OpenGL window on your computer systems.The OpenGL is a?nite state machine.The state(value of)various settings controls how objects are drawn.The state is changed by calling various OpenGL functions. Below is an example of setting up the viewing parameters fora400by400OpenGL window.glMatrixMode(GL_PROJECTION);glLoadIdentity();gluPerspective(45.0,1,0.1,100);glViewport(0,0,400,400);glMatrixMode(GL_MODELVIEW);glLoadIdentity();gluLookAt(0,0,5,//eye/camera location0,0,0,//center of interest0,1,0);//up vector that specifies the camera tiltglEnable(GL_LIGHTING);glEnable(GL_LIGHT0);4glShadeModel(GL_SMOOTH);glEnable(GL_DEPTH_TEST);glEnable(GL_NORMALIZE);float pos[4]={10,20,30,0};float intensity[4]={0.8,0.4,0.4,1};glLightfv(GL_LIGHT0,GL_POSITION,pos);glLightfv(GL_LIGHT0,GL_AMBIENT,intensity);Once,the viewing paratmers have been setup,drawing triangles using OpenGL is very easy.The vertices and normals are speci?ed with function calls.Below is an example: glBegin(GL_TRIANGLES);glNormal3f(n1.x,n1.y,n1.z);//the vertex normal for point1glVertex3f(p1.x,p1.y,py.z);//the coordinates for point1glNormal3f(n2.x,n2.y,n2.z);//the vertex normal for point2glVertex3f(p2.x,p2.y,p2.z);//the coordinates for point2glNormal3f(n3.x,n3.y,n3.z);//the vertex normal for point2glVertex3f(p3.x,p3.y,p3.z);//the coordinates for point3glEnd();When creating your viewer,allow the isovalue to be speci?ed on the command line so you can easily extract di?erent isovalues without recompiling your program.You may also want the?lename to be speci?ed on the command line.Your instructor may provide you with a“TrackBall”class to allow the viewing parameters to be changed using the mouse similar to the VTK interactors.The trackball class modi?es the eye and center of interest and creates a viewing transformation matrix that can be applied in the OpenGL pipeline.If your program allows di?erent viewing parameters to be speci?ed interactively,you may want to consider using an OpenGL“display list”for all the triangles and vertex normals. Without a display list,the calls to glNormal3f and glVertex3f have to be repeated (placed in your display callback)each time the scene is redrawn.The overhead of all these function calls can be substantial.With a display list,all the functions are called once and OpenGL stores the information in memory.The display list trades memory requirements for speed.With a display list each time the scene is redrawn,only one OpenGL call to execute the display list needs to be performed.5Questions1.How many occurrences of each of the15topologically unique cases occur in the256entry lookup table?2.For an isosurface that produces a polyhedra with no holes in it,how manyvertices and edges are there if there are n triangles?If none of the vertices where shared,there would be3n vertices,but that is obviously not the case.On average by how many triangles is each vertex shared?Hint:Euler may help you answer thisquestion.3.How many data slices did you keep in memory as you read the data?le?What isthe minimum number of slices that need to be in memory to implement thealgorithm?/doc/0f17206767.htmlpare the performance of your implementation to VTK’s marching cubealgorithm.Describe how you do the comparision and list the results.5.If you were able to implement OpenGL display lists with the TrackBall forinteractive viewing parameter changes,compare the rendering speed with andwithout display lists.PrerequisitesThis module is more challenging than many of the others.It does not require a knowledge of VTK but does require signi? cantly more programming expertise.The basic data structures covered in CS1and CS2are all that is required(arrays, classes/structs,and dynamic memory);however,because of the di?culty at least one student in each group probably should have completed an advanced data structures and algorithms course.Additionaly,a very basic knowledge of OpenGL and some window framework for it (such as GLUT)is necessary to visualize the extracted isosurface.Going over a simple GLUT/OpenGL example that draws polygons,and possibly smooth shaded polygons using vertex normals,should provide a student with enough knowledge.The basic concepts of smooth shading is covered in the course notes.Although Python or Java could be used for this assignment,it is more appropriate to use C/C++for the student to experience and appreciate the optimizations and6memory/speed improvements that a lower level language provides.If you have a large group of students working on the project,one or two students could develop the interface in Python and then access the C++code using Boost or SWIG to call theC++code from Python.InstructorThe instructor’s manual includes code for a complate visualization system using the marching cubes algorithm,OpenGL,and GLUT.The MarchingCubesTable class creates a lookup table specifying the triangles for each of the256cases.The code is heavily commented.Depending on the ability and experience of you students,you may want to suggest the data structures used in it or let them to create their own.The MarchingCubes class uses the MarchingCubesTable to extract triangles from a data set.It is set up to read data sets with the same format as the quarter resolution VTK head data set used in the Pipeline module.The quarter resolution VTK head data set consists of93?les where each?le contains a64by64slice with16bits per pixel.That data set can be viewed using:./main /usr/local/vtkdata/headsq/quarter 500where/usr/local/vtkdata/headsq contains the?les quarter.1,quarter.2,..., quarter.93.The Viewer class initializes GLUT and OpenGL.It also uses the TrackBall class to handle viewing parameter changes using the mouse(left button rotates,middle button zooms,and right button translates).The Trackball class uses quaternions to achive the results and generates a4x4transformation that can be inserted in the OpenGL pipeline using the glMultMatrix function. The author module suggests you supply the students with the TrackBall and Viewer classes and have the students write the other classes.If your students are experienced with OpenGL or you have enough students that part of the group could work on the Viewer class while others write the marching cubes classes,you could let them write the Viewer class also.The TrackBall class is not needed but then the viewing parameters cannot be adjusted using the mouse.The code in the MarchingCubes class also includes methods for creating an OpenGL display list as discussed in theBackground section.Also note the code to handledi?erent endians.The head data set is stored in little endian format so if you are7reading the raw data?le on a big endian machine,the bytes of a short data type must be swapped. 8。
fastmarching算法原理
fastmarching算法原理Fast marching algorithm (FMA) is a numerical technique used for solving the Eikonal equation, which describes the propagation of wavefronts. This algorithm is widely used in various fields such as computer graphics, medical imaging, and computational physics.The basic principle of the fast marching algorithm is to iteratively update the travel time (or distance) from a given starting point to all other points in the computational domain. This is done by considering the local characteristics of the wavefront and updating the travel time based on the minimum arrival time from neighboring points.The algorithm starts by initializing the travel time at the starting point to zero and setting the travel time at all other points to infinity. Then, it iteratively updates the travel time at each grid point based on the neighboring points, ensuring that the travel time decreasesmonotonically as the wavefront propagates outward.At each iteration, the algorithm selects the grid point with the minimum travel time among the set of points that have not been updated yet. It then updates the travel time at this point based on the local wavefront characteristics and the travel times of its neighboring points. This process is repeated until the travel times at all points have been computed.One of the key advantages of the fast marching algorithm is its computational efficiency. By exploiting the properties of the Eikonal equation and the characteristics of the wavefront, the algorithm can compute the travel times in a relatively short amount of time, making it suitable for real-time or interactive applications.In conclusion, the fast marching algorithm is a powerful numerical technique for solving the Eikonal equation and computing wavefront propagation. Itsefficiency and versatility make it a valuable tool invarious fields, enabling the simulation and analysis of wave propagation phenomena in a wide range of applications.。
Synopsys OptoDesigner 2020.09安装指南说明书
3. Troubleshooting scanning issues........................................................25
Accidental full scan proliferation by folder paths which include build or commit ID............................ 25 Solution......................................................................................................................................25
Contents
Contents
Preface....................................................................................................5
1. Scanning best practices......................................................................... 8
大连理工大学博士学位论文格式规范
4.3Contents...................................................................................................................15
摘要的主要内容为,简述全文的目的和意义、采用方法、主要研究内容和结论。
篇幅以一页为限,摘要正文后列出3-5个关键词,关键词与摘要之间空一行。
“关键词:”是关键词部分的引导,不可省略,黑体,小四。
关键词请尽量用《汉语主题词表》等词表提供的规范词。关键词之间用分号间隔,末尾不加标点。
关键词:写作规范;排版格式;博士学位论文
学校有权保留论文并向国家有关部门或机构送交论文的复印件和电子版可以将本学位论文的全部或部分内容编入有关数据库进行检索可以采用影印缩印或扫描等复制手段保存和汇编本学位论文
博士学位论文
大连理工大学博士学位论文格式规范
The Format Criterion ofDoctoral Dissertationof DUT
3.1 The Format of Picture…………………………………………………...………….5
3.1.1 The Format Example of Picture……………………………………………..5
3.1.2 The Format Description of Picture…………………………………………..5
若有不实之处,本人愿意承担相关法律责任。
纹理物体缺陷的视觉检测算法研究--优秀毕业论文

摘 要
在竞争激烈的工业自动化生产过程中,机器视觉对产品质量的把关起着举足 轻重的作用,机器视觉在缺陷检测技术方面的应用也逐渐普遍起来。与常规的检 测技术相比,自动化的视觉检测系统更加经济、快捷、高效与 安全。纹理物体在 工业生产中广泛存在,像用于半导体装配和封装底板和发光二极管,现代 化电子 系统中的印制电路板,以及纺织行业中的布匹和织物等都可认为是含有纹理特征 的物体。本论文主要致力于纹理物体的缺陷检测技术研究,为纹理物体的自动化 检测提供高效而可靠的检测算法。 纹理是描述图像内容的重要特征,纹理分析也已经被成功的应用与纹理分割 和纹理分类当中。本研究提出了一种基于纹理分析技术和参考比较方式的缺陷检 测算法。这种算法能容忍物体变形引起的图像配准误差,对纹理的影响也具有鲁 棒性。本算法旨在为检测出的缺陷区域提供丰富而重要的物理意义,如缺陷区域 的大小、形状、亮度对比度及空间分布等。同时,在参考图像可行的情况下,本 算法可用于同质纹理物体和非同质纹理物体的检测,对非纹理物体 的检测也可取 得不错的效果。 在整个检测过程中,我们采用了可调控金字塔的纹理分析和重构技术。与传 统的小波纹理分析技术不同,我们在小波域中加入处理物体变形和纹理影响的容 忍度控制算法,来实现容忍物体变形和对纹理影响鲁棒的目的。最后可调控金字 塔的重构保证了缺陷区域物理意义恢复的准确性。实验阶段,我们检测了一系列 具有实际应用价值的图像。实验结果表明 本文提出的纹理物体缺陷检测算法具有 高效性和易于实现性。 关键字: 缺陷检测;纹理;物体变形;可调控金字塔;重构
Keywords: defect detection, texture, object distortion, steerable pyramid, reconstruction
II
一种适合于频繁位置更新的网络受限移动对象轨迹索引

原 始 轨迹 , 因此 移 动 对 象 不 需 要 在 每 次 位 置 更 新 的 同时 触 发 索 引更 新 , 仅 需 要 在 轨 迹 跨 越 当前 格 栅 单 元 时 才 进 而 行 索 引更 新 , 而 显 著 地 降 低 了索 引 更 新 的代 价 . 验 结 果 表 明 , S R Tre 移 动 对 象 数 据 库 频 繁 位 置 更 新 的 实 从 实 D T - e在 际运 行 条 件 下 , 供 了 良好 的索 引维 护 及 总体 查 询 处 理 性 能 . 提
a he e or nd t r f e.f e ue ns r i s a e n e e whe o a i n up t s c ur i r r t k e t r q nt i e ton r e d d n l e to da e o c n o de o e p he
j csd t b s s Ho v r u r n n e t o s fr mo ig o jc rjco is u h a TR— e t a a a e . we e ,c re t id x meh d o vn b e ttae tre ,s c s S Tr e e ,TB— e ,F — e ,a d MON— e ,tk r jco y u is a h a i n e e o d , Tr e NR Tr e n Tr e a e ta t r nt s t e b sc i d x r c r s e
关键词 移 动 对 象 ; 据 库 ; 空 轨 迹 ; 略化 ; 引 数 时 概 索
TP3 9 0 DOI号 :1 . 7 4 S . . 0 6 2 1 . 1 4 0 3 2/ P J 1 1 .0 2 0 4 8
中图 法 分 类 号
动态追击移动物体的路径算法

动态追击移动物体的路径算法英文回答:As an AI, I can provide you with an algorithm for dynamically tracking the path of a moving object. One common approach is to use a predictive algorithm that anticipates the future position of the object based on its current trajectory and speed. This algorithm continuously updates the predicted position of the object and adjusts the tracking path accordingly.One popular method for dynamic path tracking is the Proportional-Derivative (PD) controller. This controller calculates the error between the predicted position of the object and its actual position, and then adjusts the tracking path based on this error. The proportional term controls the immediate response to the error, while the derivative term helps to dampen oscillations and improve stability.Another approach is to use a Kalman filter, which is an optimal estimator that combines measurements of theobject's position with predictions of its future position. The Kalman filter continuously updates its estimate of the object's position and velocity, allowing for smoother and more accurate tracking.In addition to these methods, machine learning algorithms such as neural networks can also be used for dynamic path tracking. By training a neural network on a dataset of object trajectories, the network can learn to predict the future path of the object and adjust the tracking path accordingly.Overall, the key to successful dynamic path tracking is to continuously update the predicted position of the object and adjust the tracking path in real-time. By using predictive algorithms such as the PD controller, Kalman filter, or neural networks, it is possible to accurately track the path of a moving object in a dynamic environment.中文回答:作为一个AI,我可以为您提供一个动态追踪移动物体路径的算法。
基于双向嵌套级联残差的交通标志检测方法

现代电子技术Modern Electronics Technique2024年3月1日第47卷第5期Mar. 2024Vol. 47 No. 50 引 言汽车智能化是汽车产业一直在追寻的目标,而自动驾驶是汽车智能化不可或缺的一环。
要实现自动驾驶,必须为汽车加上一双眼睛和配套的处理系统,这套处理系统需要像人一样识别交通标志。
交通标志检测的实现方案主要有两大类:一类是基于计算机图形学的方案,比如依据颜色直方图、尺度不变特征变换特征、方向基于双向嵌套级联残差的交通标志检测方法江金懋, 钟国韵(东华理工大学 信息工程学院, 江西 南昌 330013)摘 要: 交通标志检测是自动驾驶领域的一个重要课题,其对于检测系统的实时性和精度都有非常高的要求。
目标检测领域中的YOLOv3算法是业界公认在精度和速度上都处于前列的一种算法。
文中以YOLOv3检测算法作为基础网络,提出一种双向嵌套级联残差单元(bid⁃NCR ),替换掉原网络中顺序堆叠的标准残差块。
双向嵌套级联残差单元的两条残差边采用相同的结构,都是一次卷积操作加上一次级联残差处理,两条边上级联的标准残差块的数量可以调节,从而形成不同的深度差。
然后将两条边的结果逐像素相加,最后再做一次卷积操作。
相较于标准残差块,双向嵌套级联残差单元拥有更强的特征提取能力和特征融合能力。
文中还提出跨区域压缩模块(CRC ),它是对2倍率下采样卷积操作的替代,旨在融合跨区域的通道数据,进一步加强主干网络输入特征图所包含的信息。
实验结果表明:提出的模型在CCTSDB 数据集上mAP (0.5)、mAP (0.5∶0.95)分别达到96.86%、68.66%,FPS 达到66.09帧。
相比于YOLOv3算法,3个指标分别提升1.23%、10.35%、127.90%。
关键词: 交通标志检测; 双向嵌套级联残差单元; 跨区域压缩模块; YOLOv3; 长沙理工大学中国交通标志检测数据集; 特征提取; 特征融合中图分类号: TN911.73⁃34; TP391 文献标识码: A 文章编号: 1004⁃373X (2024)05⁃0176⁃06Traffic sign detection method based on bi⁃directional nested cascading residualsJIANG Jinmao, ZHONG Guoyun(School of Information Engineering, East China University of Technology, Nanchang 330013, China)Abstract : Traffic sign detection is an important topic in the field of autonomous driving, which has very high requirements for real ⁃time performance and accuracy of the detection system. The YOLOv3 algorithm in the field of target detection is recognized as one of the leading algorithms in terms of accuracy and speed. In this paper, by taking YOLOv3 detection algorithm as the base network, a bi⁃directional nested cascaded residual (bid⁃NCR) unit is proposed to replace the standard residual blocks sequentially stacked in the original network. The two residual edges of the bid⁃NCR unit is of the same structure, both of which are one convolutional operation plus one cascaded residual processing, and the number of cascaded standard residual blocks on the two edges can be adjusted to form different depth differences. The results of the two edges are then added pixel by pixel, and another convolutional operation is performed, finally. In comparison with the standard residual blocks, the bid ⁃NCR unit has stronger feature extraction capability and feature fusion capability. The cross ⁃region compression (CRC) module, which is an alternative to the 2⁃fold downsampling convolutional operation, is proposed. It aims to fuse the channel data across regions to further enhance the information contained in the input feature map of the backbone network. The experimental results show thatthe model proposed in this paper achieves mAP(0.5) and mAP(0.5∶0.95) of 96.86% and 68.66%, respectively, and FPS of 66.09 frames on the dataset CCTSDB. In comparison with YOLOv3 algorithm, the three indicators are improved by 1.23%, 10.35% and 127.90%, respectively.Keywords : traffic sign detection; bid⁃NCR unit; CRC module; YOLOv3; CSUST Chinese traffic sign detection benchmark(CCTSDB); feature extraction; feature fusionDOI :10.16652/j.issn.1004⁃373x.2024.05.031引用格式:江金懋,钟国韵.基于双向嵌套级联残差的交通标志检测方法[J].现代电子技术,2024,47(5):176⁃181.收稿日期:2023⁃09⁃13 修回日期:2023⁃10⁃11176第5期梯度直方图特征[1]等,以上方法最大的问题在于这些人工提取的特征高度依赖于特定的场景,泛化能力很差;另一类是基于深度学习的方案,比如文献[2]提出的基于多尺度卷积神经网络的方案,设计了一个多尺度空洞卷积池化金字塔模块用于采样。
AS1系列指南手册说明书
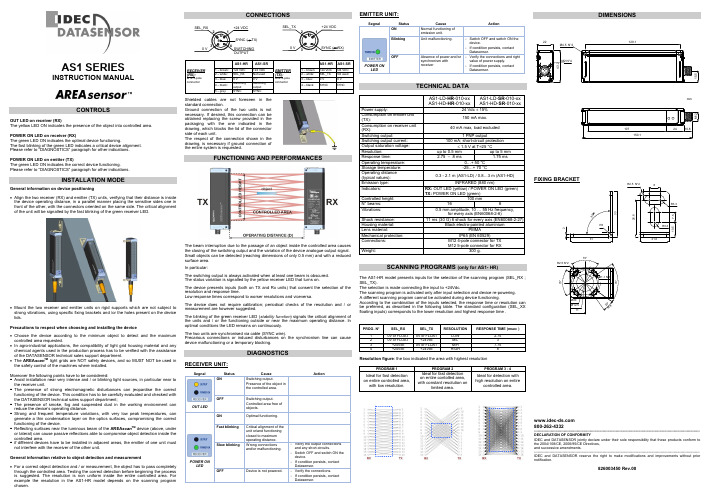
AS1 SERIESINSTRUCTION MANUALCONTROLSOUT LED on receiver (RX)The yellow LED ON indicates the presence of the object into controlled area.POWER ON LED on receiver (RX)The green LED ON indicates the optimal device functioning.The fast blinking of the green LED indicates a critical device alignment. Please refer to “DIAGNOSTICS” paragraph for other indications.POWER ON LED on emitter (TX)The green LED ON indicates the correct device functioning.Please refer to “DIAGNOSTICS” paragraph for other indications.INSTALLATION MODEGeneral information on device positioning• Align the two receiver (RX) and emitter (TX) units, verifying that their distance is inside the device operating distance, in a parallel manner placing the sensitive sides one in front of the other, with the connectors oriented on the same side. The critical alignmentof the unit will be signalled by the fast blinking of the green receiver LED.• Mount the two receiver and emitter units on rigid supports which are not subject to strong vibrations, using specific fixing brackets and /or the holes present on the device lids.Precautions to respect when choosing and installing the device• Choose the device according to the minimum object to detect and the maximum controlled area requested.• In agro-industrial applications, the compatibility of light grid housing material and any chemical agents used in the production process has to be verified with the assistance of the DATASENSOR technical sales support department.• The AREA scan TM light grids are NOT safety devices, and so MUST NOT be used in the safety control of the machines where installed. Moreover the following points have to be considered:- Avoid installation near very intense and / or blinking light sources, in particular near to the receiver unit.- The presence of strong electromagnetic disturbances can jeopardise the correct functioning of the device. This condition has to be carefully evaluated and checked with the DATASENSOR technical sales support department;- The presence of smoke, fog and suspended dust in the working environment can reduce the device’s operating distance.- Strong and frequent temperature variations, with very low peak temperatures, can generate a thin condensation layer on the optics surfaces, compromising the correct functioning of the device.- Reflecting surfaces near the luminous beam of the AREA scan TM device (above, under or lateral) can cause passive reflections able to compromise object detection inside the controlled area.- if different devices have to be installed in adjacent areas, the emitter of one unit must not interfere with the receiver of the other unit.General information relative to object detection and measurement• For a correct object detection and / or measurement, the object has to pass completely through the controlled area. Testing the correct detection before beginning the process is suggested. The resolution is non uniform inside the entire controlled area. For example the resolution in the AS1-HR model depends on the scanning program chosen.CONNECTIONSAS1-HR AS1-SR AS1-HR AS1-SR1 – brown: +24 VDC +24 VDC 1 – brown: +24 VDC+24 VDC2 – white:SEL_RXNot used2 – white:SEL_TX Not used3 – blue: 0 V0 V3 – blue: 0 V 0 V4 – black: Switching output Switching output 4 – black:SYNC SYNCRECEIVER (RX):M12 5-pole connector5 – grey: SYNC SYNCEMITTER (TX):M12 4-pole connectorShielded cables are not foreseen in the standard connection.Ground connection of the two units is not necessary. If desired, this connection can be obtained replacing the screw provided in the packaging with the one indicated in the drawing, which blocks the lid of the connector side of each unit.The respect of the connection shown in the drawing, is necessary if ground connection of the entire system is requested.FUNCTIONING AND PERFORMANCESThe beam interruption due to the passage of an object inside the controlled area causes the closing of the switching output and the variation of the device analogue output signal. Small objects can be detected (reaching dimensions of only 0.5 mm) and with a reduced surface area.In particular:The switching output is always activated when at least one beam is obscured. The status variation is signalled by the yellow receiver LED that turns on.The device presents inputs (both on TX and Rx units) that consent the selection of the resolution and response time.Low response times correspond to worser resolutions and viceversa.The device does not require calibration; periodical checks of the resolution and / or measurement are however suggested.The blinking of the green receiver LED (stability function ) signals the critical alignment of the units and / or the functioning outside or near the maximum operating distance. In optimal conditions the LED remains on continuously.The two units are synchronised via cable (SYNC wire).Precarious connections or induced disturbances on the synchronism line can cause device malfunctioning or a temporary blocking.DIAGNOSTICSRECEIVER UNIT:Segnal StatusCauseActionONSwitching output.Presence of the object in the controlled area.OUT LEDOFFSwitching output.Controlled area free of objects.ONOptimal functioning. Fast blinkingCritical alignment of the unit or/and functioning closed to maximum operating distance.Slow blinkingWrong connections and/or malfunctioning.- Verify the output connections and any short-circuits.- Switch OFF and switch ON the device.- If condition persists, contact Datasensor.POWER ONLEDOFFDevice is not powered.- Verify the connections.- If condition persists, contact Datasensor.EMITTER UNIT:POWER ONLEDPROG. N°SEL_RXSEL_TXRESOLUTIONRESPONSE TIME (msec )1 0V or FLOAT 0V or FLOAT LOW 2.752 0V or FLOAT +24Vdc M/L3 3 +24Vdc 0V or FLOAT M/H 7.754 +24Vdc +24Vdc HIGH 8Resolution figure : the box indicated the area with highest resolutionPROGRAM 1PROGRAM 2PROGRAM 3 - 4Ideal for fast detection on entire controlled area, with low resolution.Ideal for fast detection on entire contolled area, with constant resolution onlimited area.Ideal for detection with high resolution on entirecontrolled area.DIMENSIONS 800-262-4332-------------------------------------------------------------------------------------------------------------------------------------------- DECLARATION OF CONFORMITYIDEC and DATASENSOR jointly declare under their sole responsibility that these products conform to the 2004/108/CE, 2006/95/CE Directives, and successive amendments.-------------------------------------------------------------------------------------------------------------------------------------------- IDEC and DATASENSOR reserve the right to make modifications and improvements without prior notification.826003450 Rev.00。
基于Fast Marching方法的多机器人追捕算法

Ad t Kn wn Ro t f a ) do o ( o o He p ;
Re ve r mo f omNeghb r ( o o He i o s Ro t f ap); f r i 1: ie f Ne g or of o 一 sz o ( i hb s Roo ) t i Ne g f i hbo s f ot )i n Neghb r r o Ro ( s i i o s; u a e T f Neghb r o Ro ( ); pd t o i o s f ot
为 已知 点 的邻接 点 ( e h o s , n i b r ) 白色 的 为 远 点 (a ) a t rhn g fr 。F s Mac ig方 法 的
思 想 是 通 过 不 断 从 Neg b r ih os中 选 取 丁 值 最 小 的 点 加 入 Kn wn来 扩 散 o Kn wn包含 的 区域 。 Neg b r o 由 ih o s中的点 构成 的 曲线 即为公 式 ( ) 1 的近似 解 。
域 ” 。
2 基 于 F s rhn at Ma c ig方 法 的追 捕 策 略
本文 介 绍的追 捕 过程 分为 3 阶段 。 个 S e l 在 追捕 区域 随机 位 置生 成 M 个 追捕 者 和 Ⅳ 个 tp : 逃 跑 者 。计 算 每个 追捕 者追 捕 逃 跑者 的 代 价[-]生 成 追 11 , 34
2 1 年 9月 01
基于 F s Mac ig方法 的多机器人追捕算法 at rhn
丁 磊, 王 浩 , 宝 富 , 权益 方 张
( 合肥工业大学 计算机 与信息学院 , 安徽 合肥 2 0 0 ) 30 9
摘
要 : 机 器 人 系统 的追 捕 一 跑 问题 是 人 工 智 能领 域 一 个 非 常 重 要 的 问 题 。 文 为实 现 多 追 捕 者 协 作 追 捕 多 逃 本
相似序列的时间偏移量

相似序列的时间偏移量
序列相似性是序列分析中的重要概念,它表示两个序列在时间或空间上的相似程度。
在实际应用中,我们常常需要计算两个序列之间的时间偏移量,以确定它们在时间上的相对位置。
在计算时间偏移量时,我们通常采用以下步骤:
1. 将两个序列进行对齐,以便比较它们在时间或空间上的相似性。
对齐可以采用不同的方法,例如动态规划、最长公共子序列等。
2. 计算两个序列之间的相似度,常用的相似度计算方法包括欧几里得距离、余弦相似度、Jaccard相似度等。
3. 根据相似度计算时间偏移量,即将一个序列相对于另一个序列的时间或空间位置进行平移,以获得最佳的相似度。
常用的时间偏移量计算方法包括互信息法、基于信号处理的方法等。
在实际应用中,我们需要注意以下几点:
1. 对齐方法的选择会影响到时间偏移量的准确性,因此需要根据具体应用场景选择合适的对齐方法。
2. 相似度计算方法也会影响到时间偏移量的准确性,因此需要根据具体应用场景选择合适的相似度计算方法。
3. 时间偏移量的计算结果通常是一个向量,表示在不同时间点或空间位置上的偏移量,因此需要根据具体应用场景选择合适的时间偏移量表示方法。
总之,计算相似序列的时间偏移量是序列分析中的重要任务之一。
在实际应用中,我们需要根据具体应用场景选择合适的对齐方法、相似度计算方法和时间偏移量表示方法,以获得更准确的结果。
动态时间规整算法核心算法c -回复
动态时间规整算法核心算法c -回复动态时间规整算法,又称DTW算法(Dynamic Time Warping),是一种用于时间序列匹配和比对的算法。
该算法可以用来比较两个时间序列之间的相似度,并找出两个序列成对的最佳匹配。
动态时间规整算法最初是用于语音识别领域,但现在已经广泛应用于其他领域,如生物信息学、金融分析、运动模式识别等。
在这篇文章中,我们将逐步介绍动态时间规整算法的核心思想和关键步骤,以及一些应用案例。
动态时间规整算法的核心思想是,在不同的时间尺度和不同的速度下比较两个时间序列之间的相似度。
由于时间序列通常具有不同的长度和采样率,普通的距离度量方法无法直接应用于时间序列之间的比较。
因此,动态时间规整算法引入了一个时间对齐的步骤,使得两个序列在时间轴上对齐,并通过计算对齐后的序列之间的距离来衡量它们的相似度。
动态时间规整算法的主要步骤如下:1. 创建距离矩阵:将两个时间序列表示为矩阵,其中行表示一个序列,列表示另一个序列。
每个单元格的值表示对应位置上的距离或相似度度量。
2. 计算局部距离:对于每个矩阵中的单元格,根据给定的距离度量方法,计算该位置上的局部距离。
常用的距离度量方法包括欧几里得距离、曼哈顿距离和相关系数等。
3. 计算累积距离:从左上角的单元格开始,按照以下规则逐步计算累积距离。
对于每个单元格,选择其左侧、上方和左上方三个单元格中距离最小的值,加上该单元格的局部距离,作为累积距离。
4. 寻找最佳路径:从右下角的单元格开始,通过比较其左侧、上方和左上方三个单元格的值,选择一个距离最小的单元格,并将其位置作为最佳路径的一部分。
重复该步骤,直到回到左上角的单元格。
5. 时间对齐:根据最佳路径上的单元格位置,将两个时间序列对齐。
这可以通过删除或插入一些数据点来实现。
对齐后,两个序列的长度相等。
通过以上步骤,动态时间规整算法可以找到最佳的时间对齐方式,并计算出两个序列之间的距离。
这个距离可以用于比较不同序列之间的相似度,并用于其他任务,如模式识别、异常检测等。
glisson名词解释

glisson名词解释
Glisson 是一个常用的计算机科学名词,它指的是“滑动窗口协议”(Sliding Window Protocol),是一种用于分布式系统中的数据同步方法。
滑动窗口协议是一种常用的数据同步方法,它允许分布式系统中的不同节点之间进行数据同步。
具体来说,滑动窗口协议定义了一个窗口大小 (window size),节点会在窗口内发送数据,当一个节点接收到来自其他节点的数据后,它会将窗口大小减半,并继续接收数据。
当窗口大小达到预设的最大大小时,节点会停止接收数据,并等待其他节点发送数据。
Glisson 算法是一种基于滑动窗口协议的分布式锁算法,它可以保证在多个节点之间实现原子性的操作。
具体来说,Glisson 算法通过在滑动窗口协议的基础上,添加一个特殊的数据结构 (例如互斥锁) 来实现原子性的操作。
Glisson 算法的优点是具有较高的效率和可靠性,适用于多个分布式系统之间的数据同步。
Glisson 算法的基本思想是,当节点需要实现原子性的操作时,它会首先获取一个锁,并将要操作的数据结构与锁一起发送给其他节点。
在其他节点接收到数据结构并解琐后,节点会再次获取锁,并执行操作。
如果其他节点在节点获取锁期间发送了数据结构,节点会等待其他节点发送数据结构,直到获取锁为止。
Glisson 算法的优点是具有较高的效率和可靠性,适用于多个分布式系统之间的数据同步。
缺点是需要添加额外的数据结构 (例如互斥锁) 来实现原子性的操作,因此会增加算法的复杂度。
fastdeploy 释放句柄

fastdeploy 释放句柄fastdeploy释放句柄是一种高效、简洁的编程技巧,能够在编写程序时减少内存占用和提高程序运行效率。
释放句柄意味着在不再需要某个资源时,主动将其关闭或释放,以防止资源泄漏和程序崩溃。
在\ fastdeploy环境中,这种做法尤为重要,因为资源的泄漏和浪费可能导致系统性能的下降和不可预测的行为。
在实际编程过程中,开发者通常会使用各种编程语言提供的句柄释放机制来实现资源管理。
例如,在C++ 中,可以使用智能指针(smart pointer)来自动管理动态内存;在Java 中,可以通过垃圾回收器(garbage collector)来回收不再使用的对象。
这些机制都可以实现资源的有效释放,从而降低内存泄漏的风险。
然而,在fastdeploy环境中,由于其特殊性,开发者需要更加注重句柄的释放。
fastdeploy 是一个轻量级的部署工具,它为开发者提供了一整套便捷的部署方案。
在fastdeploy 中,开发者需要使用句柄来操作各种资源,如文件、网络连接等。
因此,合理地管理句柄的生命周期,确保其在不再需要时被及时释放,是提高程序稳定性和性能的关键。
为了更好地实现句柄管理,开发者可以遵循以下几个原则:1. 使用局部变量存储句柄:将句柄存储在局部变量中,可以使其在函数调用结束后自动被释放。
这样可以避免在函数返回后,句柄仍然被引用,从而导致内存泄漏。
2.避免在循环中创建句柄:在循环中创建句柄时,需要注意及时释放不再使用的句柄。
否则,可能导致循环结束后,仍有大量句柄未被释放。
可以使用循环变量来存储句柄,并在循环结束后统一释放。
3. 使用对象池(object pool):对于频繁创建和释放的句柄,可以使用对象池来管理。
对象池可以减少内存分配和释放的开销,提高程序运行效率。
4.遵循“一把锁原则”:在多线程环境下,为了避免并发问题,可以使用锁来保护句柄的创建和释放。
遵循“一把锁原则”,即在一个线程中,只需获取一次锁,就可以完成整个操作。
OSG_王锐《最长的一帧》

函数的作用是获取所有的图形上下文,并保存到这个向量组中来。 对于需要将 OSG 嵌合到各式各样的 GUI 系统(如 MFC,Qt,wxWidgets 等)的朋友来
说,osg::GraphicsContext 类是经常要打交道的对象之一。一种常用的嵌入方式也许是这样实 现的:
osg::ref_ptr<osg::GraphicsContext::Traits> traits = new osg::GraphicsContext::Traits; osg::ref_ptr<osg::Referenced> windata =
最长的一帧
王锐(array)
这是一篇有关 OpenSceneGraph 源代码的拙劣教程,没有任何能赏心悦目的小例子,也 不会贡献出什么企业级的绝密的商业代码,标题也只是个噱头(坏了,没人看了^_^)。
本文写作的目的说来很简单,无非就是想要深入地了解一下,OSG 在一帧时间,也就 是仿真循环的一个画面当中都做了什么。
解读成果: osgGA::EventQueue::createEvent,osgGA::MatrixManipulator::init,osgViewer::View::init, osgViewer::Viewer::viewerInit。 悬疑列表: 无。
第二日
当前位置:osgViewer/Viewer.cpp 第 385 行,osgViewer::Viewer::realize() Viewer::realize 函数是我们十分熟悉的另一个函数,从 OSG 问世以来,我们就习惯于在 进入仿真循环之前调用它(现在的 OSG 会自动调用这个函数,如果我们忘记的话),以完成 窗口和场景的“设置”工作。那么,什么叫做“设置”,这句简单的场景设置又包含了多少 内容呢?艰辛的旅程就此开始吧。 首先是一行:setCameraWithFocus(0),其内容无非是设置类变量_cameraWithFocus 指向 的内容为 NULL。至于这个“带有焦点的摄像机”是什么意思,我们似乎明白,似乎又不明 白,就先放入一个“悬疑列表”(Todo List)中好了。 下面遇到的函数就比较重要了,因为我们将会在很多地方遇到它: Contexts contexts; getContexts(contexts); 变量 contexts 是一个保存了 osg::GraphicsContext 指针的向量组,而 Viewer::getContexts
YOLOX:ExceedingYOLOSeriesin2021(原文翻译)

YOLOX:ExceedingYOLOSeriesin2021(原⽂翻译)YOLOX: Exceeding YOLO Series in 2021图1:YOLOX和其他最先进的物体检测器在移动设备上精确模型的速度-精度权衡(上)和精简模型的尺⼨-精度曲线(下)。
1、引⾔随着⽬标检测的发展,YOLO系列[23,24,25,1,7]始终追求实时应⽤的最佳速度和精度平衡。
他们提取当时可⽤的最先进的检测技术(例如,针对YOLOv2 [24]的锚[26]、针对YOLOv3 [25]的残差⽹络[9]),并针对最佳实践优化实施。
⽬前,YOLOv5 [7]在13.7 ms的COCO 上以48.2%的AP保持了最佳的折衷性能。
然⽽,在过去的两年中,⽬标检测学术界的主要进展集中在⽆锚检测器[29,40,14],⾼级标签分配策略[37,36,12,41,22,4]和端到端(⽆NMS)检测器[2,32,39]。
这些尚未融⼊YOLO家庭,如YOLOv4和YOLOv5仍然是基于锚的检测器,具有⼿⼯制作的训练分配规则。
这就是我们来到这⾥的原因,通过经验丰富的优化为YOLO系列带来了最新的进步。
考虑到YOLOv4和YOLOv5对于基于锚点的通道可能有些过度优化,我们选择YOLOv3 [25]作为我们的起点(我们将YOLOv3-SPP设置为默认的YOLOv3)。
事实上,由于各种实际应⽤中的计算资源有限和软件⽀持不⾜,YOLOv3仍然是⾏业中使⽤最⼴泛的检测器之⼀。
如图1所⽰,随着上述技术的经验更新,我们在COCO上以640 × 640的分辨率将YOLOv3提升到47.3% AP (YOLOX-DarkNet53),⼤⼤超过了⽬前YOLOv3的最佳实践(44.3% AP,ultralytics版)。
此外,当切换到采⽤先进CSPNet [31]主⼲和额外PAN [19]头的先进YOLOv5架构时,YOLOX-L在640 × 640分辨率的COCO上实现了50.0%的AP,⽐对应的YOLOv5-L⾼出1.8%的AP。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
E. Sifakis and G. Tziritas
Institute of Computer Science - FORTH, P.O. Box 1385, Heraklion, Greece and, Department of Computer Science, University of Crete P.O. Box 1470, Heraklion, Greece E-mails: tziritas@csi.forth.gr sifakis@csd.uch.gr
1 Introduction
issue of moving video 20 , as well as for a variety of applications of Computer Vision, including object tracking 5 , xation and 2-D 3-D motion estimation. For MPEG-4 video object manipulation 18 , the video object plane extraction could be based on change detection and moving object localization. For videoconferencing applications this motion analysis techniques could be used in the place of blue-screening" techniques. Moving objects could be used for content description in MPEG-7 applications. In tra c monitoring, tracking of moving vehicles is needed, and in other cases visual surveillance is used for detecting intruding objects. In the case of a static camera, detection is often based only on the inter-frame di erence. Detection can be obtained by thresholding, or using more sophisticated methods taking into account the neighborhood of a point in a local or global decision criterion. In many real world cases, this hypothesis is not valid because of the existence of ego-motion i.e., visual motion due to the movement
Detection and localization of moving objects in an image sequence is a crucial
2
Article submitted to Scale-Space '99
of the camera. This problem can be solved by computing the camera motion and creating a compensated sequence. In this work only the case of a static scene is considered. This paper deals with both problems, change detection and moving object localization. Indeed, complete motion detection is not equivalent to temporal change detection. Presence of motion usually causes three kinds of change regions" to appear. They correspond to 1 the uncovered static background, 2 the covered background, and 3 the overlap of two successive object projections. Note also that regions of third class are di cult to recover by a temporal change detector, when the object surface intensity is rather uniform. This implies that a complementary computation must be performed after temporal change detection, to extract speci c information about the exact location of moving objects. Simple approaches to motion detection consider thresholding techniques pixel by pixel 8 , or blockwise di erence to improve robustness against noise 21 . More sophisticated models have been considered within a statistical framework, where the inter-frame di erence is modeled as a mixture of Gaussian or Laplacian distributions 20 . The use of Kalman ltering for certain reference frames in order to adapt to changing image characteristics has been investigated also 11 . The use of rst order Markov chains 6 along rows and of two-dimensional causal Markov elds 9 has also been proposed to model the motion detection problem. Spatial Markov Random Fields MRFs, through Gibbs distribution have been widely used for modeling the change detection problem 1 , 2 , 3 , 11 , 14 and 19 . These approaches are based on the construction of a global cost function, where interactions possibly nonlinear are speci ed among di erent image features e.g., luminance, region labels. Besides, multiscale approaches have been investigated in order to reduce the computational complexity of the deterministic cost minimization algorithms 14 and to get estimates of improved quality. In 16 a motion detection method based on a MRF model was also proposed, where two zero-mean generalized Gaussian distributions were used to model the inter-frame di erence. For the localization problem, Gaussian distribution functions were used to model the couple of the intensities at the same site in two successive frames. In each problem, a cost function was constructed based on the above distributions along with a regularization of the label map. Deterministic relaxation algorithms were used for the minimization of the cost function. On the other hand approaches based on contour evolution 12 4 , or on partial di erential equations are also proposed in the literature. In 7 a three step algorithm is proposed including a contour detection, an estimation of the velocity eld along the detected contours and nally the moving contours are determined. In 15 , the contours to be detected and tracked are modeled as geodesic active contours. For the change detection problem a new image is generated, which exhibits large gradient values around the moving area. The problem of object tracking is posed in a uni ed active contour model including both change detection and object localization. In this paper we propose a new method based on level set approaches. An