TMS320LF2407A CAN总线课件
第8讲:TMS320LF2407A的外设功能_40360863

演示实验:跑马灯实验 按实验指导书走一遍 P25~P41 自己进行按键响应实验
自学及实验
复习本课讲授的内容 完成3.1.3的 (实验一、实验二) 相关资料在网络学堂下载
2407A 的事件管理功能
TMS320LF2407A系列DSP芯片包含两个事件管理 器模块EVA和EVB,每个模块都包括两个通用定 时器、比较单元、捕获单元、正交编码电路等。 EVA和EVB的各模块功能基本相同,其信号名称 如下表。
有关SFR
计数器初值大于周期值时如何计数?
计数器的计数模式
停止/保持模式:定时器停止并保持当前状态。 连续增计数模式:按输入时钟计数,直到等于周 期寄存器的值,然后复位为0,再开始下一次计数。 定向增/减计数模式:根据TDIRA/B的输入状态 进行增减计数,高时进行增计数,低时进行减计 数。 连续增/减计数模式:增减不受TDIRA/B的影响。 达到周期值时变为减计数,减到0时进行加计数。
该方式下,SEQ1 或SEQ2在一次排 序过程中可对8个 任意通道进行转 换,SEQ1的转换 结果放在Result0 -7中, SEQ2的 转换结果放在 Result8-15中。
按照上表的设置,双排序方式下用SEQ1顺序完成通道2,3, 2,3,6,7,12的转换。 同时应该设置MAX CONV1=6。 自动转换过程见下图。
事件管理器的中断事件分为三组,每一组都 有各自不同的中断标志和使能寄存器,见下表。
事件管理器A的中断分组
A
EVA中断标志寄存器
EVA中断屏蔽寄存器
EVA功能介绍
通用定时器功能 比较和 PWM功能 捕获功能 正交编码脉冲电路功能 介绍通用定时器功能和捕获功能。
通用定时器功能
每个EV有两个通用定时器,对于EVA是T1和T2,对于 EVB是T3和T4,每个定时器包括: • 一个16位增/减计数器的TxCNT • 一个16位的定时器比较寄存器TxCMPR • 一个16位的周期寄存器TxPR • 一个16位的定时器控制寄存器TxCON • 可选择内外部时钟 • 可产生定时器上溢、下溢、比较和周期中断。
基于TMS320LF2407的智能断路器的CAN通信设计
1.引言短路器是一种量大面广的重要的低压配电电器,其作用是分配电能和保护电器配电网络和工业设备免受短路、过载、欠电压和接地故障电流的破坏。
随着计算机技术、微电子技术、数字处理技术的发展,断路器逐渐趋向自动化、智能化、模块化、小型化。
为了使供电系统中的多台智能型断路器实现联网通信、集中监控,开发适应多种现场总线的科通信低压电器已经成为一个重要的发展趋势。
目前,我国也正致力于开发国产第四代断路器——智能化、可通信断路器,其主要特征是在智能化的基础上具备现场总线的可通信特点。
DSP(Digital Signal Processors)是一种独特的微处理器,是以数字信号来处理大量信息的器件。
其工作原理是接收模拟信号,转换为0或1的数字信号,再对数字信号进行修改、删除、强化,并在其他系统芯片中把数字数据解译回模拟数据或实际环境格式。
它不仅具有可编程性,而且其实时运行速度可达每秒数以千万条复杂指令程序,远远超过通用微处理器,是数字化电子世界中日益重要的电脑芯片。
它的强大数据处理能力和高运行速度,是最值得称道的两大特色。
本文介绍基于TMS320LF2407DSP的智能断路器的CAN通信设计,可实现远距离遥控、遥调、遥测、遥讯等“四遥”功能,并能显示、记忆、监控。
TMS320C2XX是继TMS320C2X和TMS320C5X之后出现的一种低价格、高性能定点DSP芯片,主要包括TMS320C20X、TMS320C24X两个子系列。
而DSPTMS320LF240x是TMS320C2000家族中相对较新的,功能强大的芯片。
2.硬件的总体结构、工作原理及CAN总线的作用2.1 智能断路器的结构与原理智能断路器的原理如下:电流传感器采集三相电流和地线电流,送入信号调理电路进行滤波、放大,输出两路信号。
一路送往DSP的A/D接口,微处理器对信号进行数字转换、计算和判断;另一路送往模拟脱扣检测电路,当发生严重短路情况时,将直接驱动脱扣电路跳闸。
DSP—TMS320LF2407的CAN总线扩展设计
嚣- - 一 ■ _ =
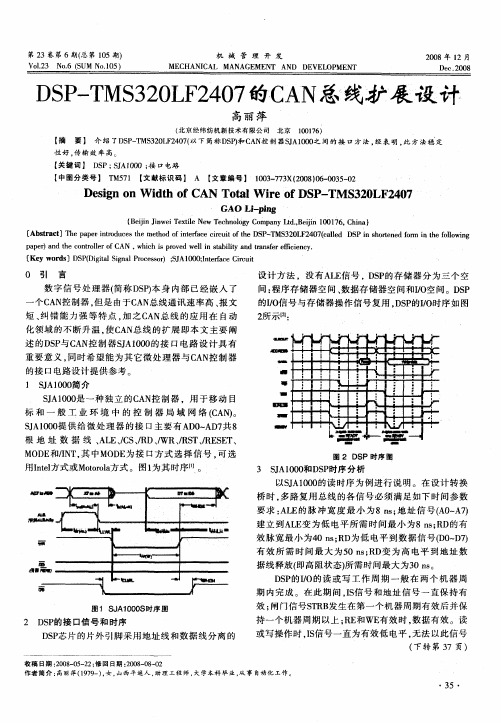
图 2 DSP 时 序 图
MO E和/ T, 中MO E 接 口方 式 选 择 信 号 . 选 D I 其 N D 为 可 用Itl 式或 Mo rl方 式 。图 l ne方 tBiblioteka o a 为其 时序 【 。 1 】
3 sA1 0 和D P J 00 S 时序 分析
数字 信 号 处 理 器( 称 D P 本 身 内部 已经 嵌 入 了 简 S)
一
个C 控 制器 , AN 但是 由于C N总线 通讯 速 率高 、 文 A 报
l —Il — l l — l
短 、 错 能 力 强 等特 点 , 之 C 纠 加 AN总线 的应 用 在 自动 化领 域 的不 断 升 温 , A 总 线 的 扩 展 即本 文 主要 阐 使C N
tt lt t
一
■ …
一
建 立 到A E 为 低 电 平所 需 时 间 最 小 为8n : D的有 L变 sR
]
效 脉 宽最 小 为4 sR 0 n ; D为 低 电平 到 数 据 信 号( O D ) D — 7
有 效 所 需 时 间最 大 为5 sRD 为 高 电平 到 地址 数 0n ; 变 据线 释 放f 即高 阻状 态) 需时 间最 大为 3 S 所 Ot 。 l
以SA10 的读 时序 为 例进 行 说 明 。在 设 计 转换 J 00
k一
U■- J
_
, ’啦— __ 一
■ _ _ __ 一 ■_ - _ _
r
桥 时 。 路 复 用 总线 的 各信 号 必 须 满足 如 下 时 间参 数 多
要 求 :L A E的脉 冲 宽 度 最 小 为8n ; 址 信 号 f0 A ) s地 A~7
内嵌CAN控制器的TMS320LF2407的CAN通信实例
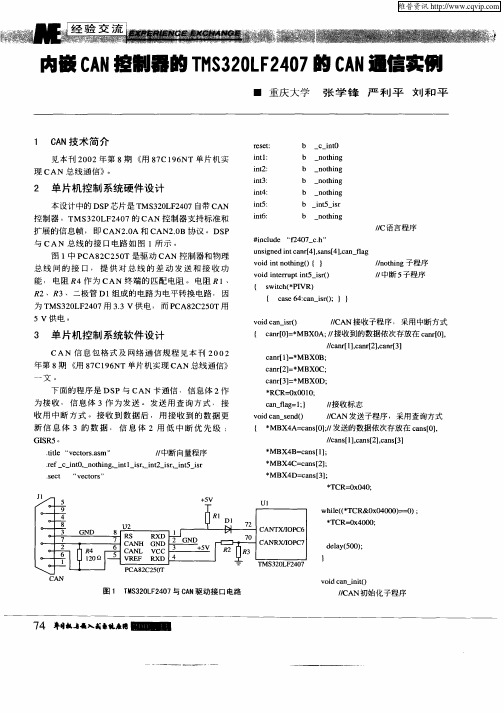
GND
RS RXD CANH GND CANL VCC VREF RXD 三 P CA8 C2 o r 2 5 ]
d ly 5 0 ; ea (0 )
l 0Q 2
TM ¥ 2 LF2 o 3O 47
CAN
v i a odc n
_
ii) nt (
图 1 TS 2L2 0 M 3 0 F 4 7与 C N 动 接 口 电路 A驱
/ N初始 化子程序 / CA
7 丰 -鼻l 冬 ^一_ _ 4 瞎 .| .入式 q 田_
维普资讯
{
AN引脚 I C OP 6、 MCRB= MCRB1x 0; /配 置 C 0c / /O C / P 7为特殊功能 引脚 I
M D ER=0x 00; CA N I FR=0xFFFF;
一
s ct e
“ ve t r ” co s
J l
+5 V
尺l
I1 J
whl( TCR&0 0 0 0 = 0 ; i ( e x 4 0 ) = )
D 7 2
U2
* TCR- x 0 0 - 40 ; 0
CANTX/OP I C6 CANRX/ OP I C7
GI R5。 S
.
l =1} fg ; a
—
/ / 接收标志
v i a odc n
sn ( ed)
/A / N发送 子程序 ,采用查询 方式 C
/c n [] a s2 ,a s3 /a s1,n [] n [】 c c
{ MB 4 cn []/ X A= a s0; 发送 的数据依次存 放在 cn [] / as , 0
MBX4 B=c n 【】 a s 1; M BX4 C=c n [] a s2 ; M BX4 c n [] D= a s 3 ;
基于TMS320LF2407A的CAN总线数据采集系统
基于TMS320LF2407A的CAN总线数据采集系统刘海波;王红艳;李爱宁;何洪【摘要】以TM320为核心设计了CAN总线数据采集系统,该系统利用CAN总线的特点和性能优势,结合数据采集系统的现状,给出了数据采集系统的总体结构设计,通过CAN总线将每一个独立的数据节点连接起来,实时采集数据传送到以TM320为核心的上位机进行处理;监测节点以STC89C58RD+作为微处理器,SJA1000作为CAN总线控制器,82C250作为CAN总线收发器并通过CAN控制器MCP2510与上位机通信.该系统稳定可靠,并具有很好的扩展性,能够很好地满足多种控制系统数据采集的需要,自动化程度大大提高.【期刊名称】《仪表技术与传感器》【年(卷),期】2014(000)001【总页数】3页(P100-102)【关键词】CAN总线;TM320;数据采集【作者】刘海波;王红艳;李爱宁;何洪【作者单位】河北工程技术高等专科学校,河北沧州061001;河北工程技术高等专科学校,河北沧州061001;河北工程技术高等专科学校,河北沧州061001;河北工程技术高等专科学校,河北沧州061001【正文语种】中文【中图分类】TP2120 引言随着数字化、信息化时代的到来,现场总线技术已经广泛地应用于工业控制中,涉及行业和领域非常广泛,其中汽车制造、化工生产、钢铁制造、煤矿生产、智能建筑等应用广泛,而且尤其以CAN总线在这些行业应用中的份额较大。
其主要原因就是由于CAN总线具有可靠性高、成本低、容易实现等优点,而且其传输速率高、抗电磁干扰能力强,当传输距离达到10 km时传输速度仍可达到5kbps[1]。
在CAN总线的各种应用系统中,都有大量的现场参数需要测量,从而实现对整个系统的控制和监测。
对现场参数测量来说数量大、测量点分散、测量精度要求也高,如何运用先进技术实现多参数智能测控值得我们去研究。
文中以TM320为核心,设计了CAN总线智能数据采集系统,实现将多种被测参数集中进行测量、处理、显示和记录,并与控制系统相连实现自动控制和调节。
TMS320LF2407系统设计及外扩CAN总线设计
控 制 器局 域 网 扩展 设计
Ha d r m p sto o ii a y tm n r wa e Co o iin fM nm lS se a d CAN s Bu
Ex a s n De in Ba e n T S 2 LF 4 7 p n i sg s d o M 3 0 2 0 o
能、 低功耗等优 良性能 , 受到了用户的极大欢迎。T S2L20( M 30F47以下简称 : 20 ) I 47具有 T S2I'0 系列 _  ̄ M 30 2 x Y4 的结构和 功能 , 1 位 定点 的、 其 6 处理速度 为 3 0 条 指令/ ×17 s的 DP内核为模 拟系统 的设 计者提供 了一个不 S
( 北京空间机电研究所 , 北京 10 7) 006
摘 要 文章针对定点数字信号处理器 ( it i a Poe o, S ) Dga S n r s r D P 芯片 T S2L20 的结构特点, il g l c s M 30F47
介绍 了该芯 片最 小 系统 电路 的设 计方 法 , 包括 时钟 电路 、 复位 电路 、 合测 试 行动 组 (0 t et co r p 联 Ji s A tnG o . nT i u
牺牲系统 精度和性 能 的数 字解决方 案 , 过把一个 高性能 的 D P内核 和微 处理 器 的片 内外设 集成 为一个芯 通 S 片的方案 , 使得它 成为传 统 的微控 制单元 ( C ) 昂贵 的 多片设计 的一种 廉 价 的替 代产 品 。本 文基 于作者 M U和
的实际 电路设计 经验 , 绍 了基于 L 20 介 F 4 7最小 系统 的硬件 组成 , 以及外 扩控 制器局 域 网( ot lr r e C n o e Ae N t rl a .
《CAN总线》课件

CAN总线的网络拓扑结构
总线拓扑结构
CAN总线常采用“总线”拓扑结构,节点通过总线相连。
树形拓扑结构
扩展的CAN总线也可以采用树形结构,增加节点间的通信和连接。
混合型拓扑结构
实际应用中,总线和树形拓扑结构也可以结合使用,以满足特定的应用需求。
CAN总线的错误处理机制
错误检测
CAN总线采用CRC校验和一些其他 的技术进行检错,确保数据传输 的准确性。
CAN总线的优缺点及与其他总线的比较
优点
• 成熟的技术 • 高性能、高可靠性和实时性强 • 传输速率快,容量大 • 成本较低,可延迟升级
缺点
• 节点建设的成本较高 • 不支持多主机竞争机制 • 防干扰性不如其他总线
CAN总线的应用案例
汽车电子
CAN总线广泛应用于汽车车身控 制、发动机管理、制动系统、车 门锁等功能上。
CAN总线可以实现医疗器械的控 制、监测、通信等功能,提高医 疗设备的智能化。
CAN总线的物理层协议
CAN总线采用的物理层协议是双绞线双向传输,传输速率可选择1Mbps、500Kbps、250Kbps、125Kbps四种。 CAN常用的线缆是屏蔽双绞线。
CAN总线的数据链路层协议
1
逻辑链路控制
CAN总线使用了逻辑链路控制(LLC)协
CAN总线的标准化和认证
CAN总线的标准化和认证很重要,包括ISO11898标准规范、CANopen协议、Can in Automation(CiA)协议等, 同时还需符合CE、EMC、RoHS等认证标准。
信息帧的优先级
2
议。
CAN总线采用“重发优先级”机制,即具有
较高优先级的消息帧比较低优先级的消 息帧CAN总线的LLC协议实现了简单的流控制, 即发送方发完一部分帧后必须等待接收 方的回复才可继续发送。
DSP课件第二章TMS320LF240x硬件结构
当片内外设产生中断时,CPU响应中断并执行相应的中断服务程序 对片内外设进行操作。
05
TMS320LF240x的电源管理和低功耗
模式
电源管理单元
电源管理单元(PMU)是TMS320LF240x芯片中的一个重要组成部分,负责控制芯 片的电源供应和功耗管理。
PMU包含多个电源域,可独立控制各个电源域的开启和关闭,以实现灵活的功耗管 理。
较
他设备进行数据交换,可配 置为发送或接收模式。
器
比较器用于检测电压或电平 是否达到预设值,输出电平
可配置为高或低,常用于 PWM控制或阈值检测。
看门 狗定 时器
片内外设的访问方式
直接访问
通过特定的寄存器地址直接读写片内外设的控制寄存器和数据寄 存器。
间接访问
通过特定的寄存器地址读写片内外设的控制寄存器来配置片内外设, 再通过数据寄存器进行数据传输。
PMU还具有过压和欠压保护功能,以确保芯片在异常电源条件下能够安全运行。
低功耗模式
TMS320LF240x支持多种低功 耗模式,以便在不需要时降低芯
片功耗。
低功耗模式通过关闭不需要的内 部时钟和电源域来实现功耗降低。
在低功耗模式下,芯片的某些功 能将被禁用,但仍可以响应外部 事件或中断,并在必要时唤醒。
需求。
输入输出电平
02
TMS320LF240x的输入输出电平一般为CMOS电平,能够与
TTL和CMOS电路兼容。
驱动能力
03
TMS320LF240x的驱动能力较强,能够驱动较大规模的外部电
路。
封装形式
• TMS320LF240x的封装形式一般为塑封或陶瓷封装,具体 取决于应用需求和生产厂家。
基于TMS320LF2407A的CAN总线数据采集系统

中图分类号 : T P 2 1 2
文献标识码 : A
文章编号 : 1 0 0 2—1 8 4 1 ( 2 0 1 4 ) 0 1 — 0 1 0 0— 0 3
CAN Bu s I n t e l l i g e n t Mu l t i —P a r a me t e r Me a s u r e me n t a n d Co n t r o l S y s t e m Ba s e d i n TM S 3 2 0 LF 2 4 0 7 A
基于TMS320LF2407和CAN总线的通信应用设计
D 2 07 SP 4
CN A 模块 CN A 收发 器
P A8 C 0 C 2 25
C A N
Do篓 C S7 P P 发 2I A N C A N 器 8 收 2
C 50 2
CN A 收 发 器
PA C 82 C5 20
模 块
图 1 系 统 原 理 图
V0 . 1 № . I2 1
文 章 编 号 :10 .27 20 )1 07 .5 0 14 1(060 . 06 0
基 于 T 3 0 F 4 7和 C N 总 线 的 MS 2 L 2 0 A 通 信 应 用 设 计
彭显 刚 , 暨绵 浩 , 曾岳 南 , 曾建安
( 东 T q 大 学 自动化 学 院 ,广 东 广 _l , 广州 509 ) 100
维普资讯
第 1 期
彭 显 刚 等 :基 于 T S 2I2 0 M 30Y 4 7和 C N总 线 的通 信 应 用 设 计 A
7 7
2 应 用 实例 设 计
针对 1 f I公 司 T S2 L 20 内 嵌 的 C N 模 块 的 方 便 性 和 实 用 性 , 本 文 用 M 30 F 4 7 A T S 2 L 20 M 3 0 F 4 7微 控制 器组成 一个 C N总 线 网络 ,进 行 实 时收 发 数据 ,并根 据 各 自邮箱 A 的标识 符判 别数 据是 接收 还是 丢弃 .C N 收发 器使 用 P IIS的 P A 2 2 0 A H LP C 8 C 5 ,此 应 用 实 例可扩 展性 强 ,功能强 大 ,若要 增 加节 点个 数 ,只需要 在 C N 总线 上挂 接带 有 C N模 A A
| 德州仪 器 ) 司的 D P芯片 T S 2 L 20 n( 公 S M 3 0 F 47内嵌 的 C N模 块是 一 个 1 的外 设模 A 6位
DSP(TMS320LF2407A)讲座 经典超牛

5
DSP直接插入函数
当调用一个直接插入(inline)函数时,该函数的C源代码被直接插入 到调用处,这被称为直接插入函数展开。用在短小函数且在调用的地方 不多时才是最优的。
void inline enable() { asm(" CLRC INTM "); } 优点--直接插入函数展开对于短小函数,节省了函数调用的额外开销 缺点--可能大大增加代码的长度,特别是插入函数在多个地方被调用时。
主要内容
1. 2. 3. 4. 5. DSP的C语言编程基本操作 CC集成开发环境的使用 DSP各模块及系统举例 代码编写风格介绍 注意事项及小结
1
1.0 几个基本问题
1.DSP编程用C语言或汇编语言都可以,但是建 议用C语言比较好,如果原来有C语言的基础那 学起来会更好,如果没有,也可以边学DSP边 学C语言
17
ON-CHIP flash EEPROM (Electrically- erasable programmable read- only memory)烧录
当程序编译、汇编、链接和调试均通过后,确认程序在仿真情况 下没有错误,就可以将程序烧录到FLASH中。DSP的开发软件集成了一 个程序,可以从执行文件OUT转换到编程器可以接受的格式,使得编程 器可以用次文件烧写EPROM或Flash。 FLASH用来存储用户程序,使应用程序可以在脱离仿真器的情况 下运行。
4
C语言和汇编语言混合编程
1.单独的汇编语言模块,并将他们与编译后的C模块链接在一起, 这是最常用的方法 C语言-- Extern int asmfunc(); 汇编-- .global _asmfunc _asmfunc: …….. RET 2.使用直接插入汇编语言,并且直接嵌入到C源程序中 asm(“assembler text”); -- asm语句 3.在C源语言中使用汇编语言变量
数字信号处理器tms320lf2407

数字信号控制器TMS320LF2407DSP芯片,也称数字信号控制器,是一种具有特殊结构的微处理器。
DSP芯片内部采用程序和数据分开的哈佛结构,具有专门的硬件乘法器,广泛采用流水线操作,提供特殊的DSP指令,可以快速实现各种数字信号处理算法。
TMS320LF2407芯片是TI公司 TMS320系列中的一种 16 位定点DSP芯片, 是目前应用最为广泛的芯片。
基于TMS320C2xxDSP的CPU核结构设计提供了低成本、低功耗、高性能的处理能力,对电机的数字化控制非常有用。
同时,几种先进的外设被集成到该芯片内,形成了真正意义上的数字控制器。
∙2407的基本特点和资源配置LF2407 DSP具有TMS320系列DSP的基本功能之外,还有其自身特点:∙采用高性能静态CMOS技术,使得供电电压降为3.3V,减小了控制器的功率损耗;30MIPS的执行速度是的指令周期缩短到33ns(30MHZ),从而提高控制器的实时控制能力;∙基于TMS320C2XX DSP的CPU内核保证了TMS320LF2407DSP代码和TMS320系列DSP代码兼容;∙片内有高达32K字×16位的Flash程序存储器;高达2.5K×16位的数据/程序RAM;2K字的单口RAM;∙SPI/SCI引导ROM;∙两个事件管理模块EVA和EVB,每个均包括如下资源:两个16位通用定时器;8个16位的脉宽调制通道(PWM),可以实现三相反相器控制、PWM的中心或边缘校正、当外部引脚\PDPINTX出现低电平时快速关闭PWM通道;防止击穿故障的可编程的PWM死去控制;对外部事件进行定时捕获的3个捕获单元;片内光电编码器接口电路;16通道的同步ADC转换器。
∙可扩展的外部存储器具有192K×16位空间,分别为64K字程序存储空间,64K字的数据存储空间和64K字的I/O存储空间;∙看门狗(WD)定时器模块;∙10位的ADC转换器,其特性为:最小转换时间为500ns,16个多路复用的输入通道、可选择两个事件管理器来触发两个8通道输入ADC转换器或一个16通道输入的A/D转换器;∙基于锁相环(PLL)的时钟发生器;∙高达41个可单独编程或复用的通用输入输出引脚(GPIO);∙5个外部中断(两个驱动保护、复位和两个可屏蔽中断);∙电源管理,具有3种低功耗模式,能够独立的将外围器件转入低功耗工作模式;∙数字和混合信号的外设∙事件管理器;∙CAN(Controller Area Network),即控制器区域网;∙串行通信接口(SCI)和16位串行外部设备接口(SPI);∙模数转换器(ADC);∙系统保护,例如低电压保护和看门狗定时器。
一、CAN总线ppt课件

4、测量查找故障点:拔下J500插接器,测量插 头二线端子上的电压值,CANH应为2.6V、 CANL应为2.4V,存在断路的导线插头端子电压 值为0V,对这根导线采用逐段测量方法,查找 到断路点(亦可采用逐段测量导线导通性、示波 器拾取波形的方法测量查找故障点)。
七、舒适CAN总线故障诊断(帕萨特)
六、驱动CAN总线故障诊断(菠罗例
在车载电脑中,发动机、自动波箱、ABS、 安全气囊、动力转向等通过总线连接组成 的CAN总线系统称为高速总线系统,因为 这些节点所利用的数据对实时性要求很强, 信息须高速传输才是有效数据,低速传输 传会使数据失去实时性而不可用(串行: 排队、上线传输)。通常把高速总线叫做 驱动CAN总线,其传输速度为1Mbit/s。
CAN收发器(驱动器)。是CAN控制器与物理 总线之间的接口,对线差动发送和接收。
总线上的信号电压变化
差动传输收发原理
三、CAN数据帧的发送格式
帧起始 标识符 RTR 控制域 数据域 CRC校验 应答域 帧结束
1、帧起始:标志数据开始,带有大约5V电压的1位, 被送入高位CAN线;带有大约0V电压的1位被送入低位 CAN线。2、标识符:判定数据中的优先权。如果几个 节点都要同时发送各自的数据,那么,具有较高优先权 的节点,优先发送。3、RTR:远程传送请求位。4、控 制域:5、数据域:预发送的数据内容被编排在此区域 中。6、CRC校验:检测传递数据中的错误。7、应答 域:接收数据的节点,给出一个应答(发送节点给总线 留出应答空隙,接收节点发出一个显性位0,表示正确 接收了数据,如果在这个空闲时间内,所有接收节点均 未发回应答,表示数据发送错误,发送节点会重新发 送)。8、帧结束:连续发送7个隐性位,标志数据报告 结束。在此是显示错误并重复发送数据的最后一次机会。
DSP课件第二章TMS320LF240 xDSP内部资源n.ppt

图2.2 CPU的输入定标器、中央算术逻辑单元和乘法单元的功能模 块
2.1.1 输入定标移位器
该移位器将来 自程序存储器或数 据存储器的16位数 据调整为32位数据 送到中央逻辑单元 CALU。可进行015位左移及进行符 号扩展。
2.1.2 乘法器
16x16的硬件乘法器,可在单个机器周期内产生一 个32位乘积结果的有符号或无符号数。乘法器两个输入, 一个来自16位的临时寄存器(TREG),另一个通过数 据读总线(DRDB)来自数据存储器,或通过程序读总 线(PRDB)来自程序存储器。两个输入值相乘后,乘 积结果存放在32位乘积寄存器(PREG)中。 4种移位方式,0,1,4,-6(右移6位) 。
2. 累加器(ACC) 当CALU中的运算完成,其结果就被送之累加器,在累加器中执 行单一的移位或循环操作。
3. 输出数据定标移位器 输出数据定标移位器存储指令中指定的位数将累加器输出的内容 左移0-7位,然后用SACH或SACL指令将移位器的高位字或低位 字存至数据存储器中。此过程中,累加器的内容保持不变。
2.2.6 Watchdog(WD)定时器
WDCHK2-WDCHK0:Watchdog Check Bit ,WD检查位 101 正常, 其他代码 ,系统复位. WDPS2-WDPS0:Watchdog Prescale Select Bits,WD时钟 预定标位
2.2.6 Watchdog(WD)定时器
2.1.3 中央算术逻辑部分
主要组成包括: 中央算术逻辑单元(CALU) 32位累加器(ACC) 输出数据定标移位器
2.1.3 中央算术逻辑部分
1. 中央算术逻辑单元(CALU) 实现算术和逻辑运算功能,大多数功能都只需1个时钟周期。这 些运算功能包括:16位加、16位减、布尔运算、位测试以及移 位和循环功能。
基于TMS320 LF2407A在CAN总线上的应用研究
基于TMS320LF2407A在CAN总线上的应用研究介绍了以DSP(TMS320F2407A)和收发器SN65HVD230D为主体所构成的控制模块在CAN总线上的应用。
详细分析了实时操作系统uC/OS-II在DSP中的移植,从而提高系统的实时性和软件的运行效率。
标签:CAN总线;TMS320F2407A;接口技术;uC/OS-II,嵌入式操作系统1 引言CAN,全称为“Controller Area Network”,即控制器局域网,是国际上应用最广泛的现场总线之一。
CAN是一种多种方式的串行通讯总线,基本设计规范要求有高的位速率,高抗电磁干扰性,而且能够检测出任何错误。
由于CAN总线具有很高的实时性能,因此,CAN已经在汽车工业、航空工业、工业控制、安全防护等领域中得到了广泛应用。
TMS320LF2407A是美国TI公司生产的一种定点DSP芯片,它采用增强的C2xx CPU内核结构,代码与24x系列的芯片兼容。
与24X系列的DSP芯片相比,TMS320LF2407A采用3.3 V电源供电,功耗更低;CPU时钟频率可达40MHz,速度更快,EVM板可对LF2407代码进行全速检查,其中有544个字长的片上数据存储器、128K字长的板上存储器、片上只读闪烁存储器,片上UART和一个MP7680/A转换器, 可分别寻址程序存储器、数据存储器以及I/O各64位空间和两个事件管理模块EV A和EVB,各有两个16位的通用定时器。
板上安装的器件可使评估板解决各类问题,4个扩展接口,可提供任何评估电路。
TMS320LF2407A 中含有一个支持CAN 2.0B协议的CAN控制器,支持标准和扩展标识衬;支持两种信息帧格式,即数据帧和远程帧,可以自动应答远程帧的请求,当出现错误或仲裁失败时,具有自动重发数据功能。
本文主要介绍使用TMS320LF2407A进行CAN通信时硬件和软件方面的设计。
2 DSP功能介绍本系统采用的TMS320LF2407A微处理器主要包括以下一些功能模块:(1)一个32位的中央算术逻辑单元(CALU)。
TMS320LF2407系统设计及外扩CAN总线设计(1)
Abstract This paper introduced the hardware design methods of the minimal system about TMS320LF2407, which was the fixed- point DSP chip, according to its structure ( Introducing the relative circuits about Timing, Reset, JTAG Emulation and Memory Interfacing and Voltage Transit ion) . It also particularly introduced the design of expansion inter facing circuit for CAN Bus, in terms of practical application. Key Words Chip Digital signal processor Minimal system Controller area network Expansion design
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
向TCR寄存器中的发送应答位(TAn)写1, 清除发送中断标志位和发送应答位。 如果多个发送邮箱的发送请求位置位,则 信息帧将一个接一个地发送出去,邮箱权 限高地先发送。如果发送失败,则发送邮 箱将再次发送。
2008-10-8
信息发送的流程图 初始化发送邮箱 使能发送邮箱(MEn=1)如果为邮箱 2和3则要设置其为发送方式。 设置发送请求位TRS=1?
2008-10-8
初始化邮箱流程图 禁止邮箱MEn=0
改变数据域请求CDR=1
配置邮箱的标识符、控 制和数据区 进入正常工作模式 CDR=0
使能邮箱MEn=1
2008-10-8
信息的发送
CAN控制器的发送邮箱有邮箱4和邮箱5及被配置 为发送方式的邮箱2和邮箱3。在写数据到发送邮 箱的数据区后,如果相应的发送请求位使能,则 信息帧被发送到CAN总线上。 信息发送的流程图如图4所示,具体步骤为: · 初始化发送邮箱; · 设置MDER寄存器中的邮箱使能位为1,即 MEn=1(n=2~5); · 设置TCR寄存器中的发送请求位为1,即 TSRn=1; · 等待发送应答信号Tan或发送中断标志位 MIFn置位,如TAn=1或MIFn=1,则发送成功, 进入下一步;
2008-10-8
设置局部接受寄存器LAM 设置接收邮箱的标识符 MEn=0 使用接收邮箱(MEn=1)如邮箱 为2或3则要设置其为接收方式
RMPn=1?或MIFn=1? 复位接收悬挂和接收中断标志位
2008-10-8
2008-10-8
设置BCR1和BCR2寄存器,即配置正确的 波特率、同步跳转宽度、采样次数和重同 步方式; 清MCR寄存器中的改变配置请求位为0, 即CCR=0; 判GSR寄存器中的改变配置使能位是否为0, 即CCE是否为0,如CCE=0则进入下一步 配置完成进入正常工作模式
2008-10-8
SDJU
第五章DSP的CAN总线
2008-10-8
初始化CAN控制器 1 初始化或重新配置位定时器 位定时器主要由BCR1和BCR2两个寄存器 组成,配置位定时器也就是设置这两个寄 存器。BCR1和BCR2决定着CAN控制器的通信 波特率、同步跳转宽度、采样次数和重同 步方式。
2008-10-8
Tan=1?或 MIF=1?
复位发送应答位和发送中断标 志位Tan=1
2008-10-8
信息地接收 CAN控制器地接收邮箱有邮箱0和邮箱1及 被配置成接收方式地邮箱2和邮箱3。接收 邮箱初始化时要设置其标识符及标识符相 关的局部屏蔽寄存器(LAM)
2008-10-8
接收滤波器
CAN控制器在接收信息时,先将要接收的信息的 标识符与相应接收邮箱的标识符(位于邮箱的 MSGIDnH和MSGIDnL寄存器)进行比较,只 有标识符相同的信息才能被接收。CAN控制器的 接收滤波器使得接收邮箱可以忽略更多的位来接 收信息,即如只有被屏蔽的那几位标识符不相符, 则接收邮箱仍能接收此信息。当接收屏蔽使能位 (AME)为0时,则局部接收屏蔽寄存器将失效。 LAM1对应于被配置为接收下的邮箱2和邮箱3, LAM0对应于邮箱0和邮箱1。
2008-10-8
2008-10-8
2008-10-8
2008-10-8
初始化或重新配置位定时器 位定时器主要由BCR1和BCR2两个寄存器 组成,配置位定时器也就是设置这两个寄 存器。BCR1和BCR2寄存器决定了CAN控 制器的通信波特率、同步跳转宽度、采样 次数和重同步方式。对位定时器的配置步 骤如下: 设置MCR寄存器中的改变配置请求位为1, 即CCR=1; 判GSR寄存器中的改变配置使能位是否为1, 即CCE是否为1,如CCE=1则进入下一步;
2008-10-8
接收信息的步骤 邮箱接收信息的流程图如图5所示,具体步 骤如下: 设置局部屏蔽寄存器(LAM); 设置接收邮箱的标识符和控制寄存器; 等待接收信息悬挂位RMPn或接收中断标 志位MIFn置位,如RMPn=1或MIFn=1, 则接收成功,进入下一步; 向RCR寄存器中的接收信息悬挂位 (RMPn)写1,清除接收中断标志位和接 收信息悬挂位。
配置位定时器的流程图
进入改变配置模式CCR=1
NO
CCE=1?
YES
设置BCR1和BCR2 寄存器
进入正常工作模式CCR=0NOCCE=0?YES
2008-10-8
对邮箱的初始化 对邮箱初始化主要是设置邮箱的标识符,发 送的是远程帧还是数据帧及对发送的数据 区(即对MBXnA~MBXnD)赋初值。 初始化邮箱的流程图如图所示,下面是它 的具体步骤: 设置MDER寄存器中的邮箱使能位为0,即 MEn=0(n=0~5); 设置MCR寄存器中的数据帧改变请求位位 1,即CDR=1;
2008-10-8
配置邮箱的内容如标识符寄存器、控制寄存 器及数据区; 清MCR寄存器中数据域改变请求位为0, 即CDR=0,进入正常工作模式; 设置MDER寄存器中的邮箱使能位为1,即 MEn=1。 通过初始化位定时器和邮箱就完成了对 CAN控制器的初始化,只要满足一定的条 件,相应的邮箱就能进行正常的发送和接 收操作了。