通用直流屏MODBUS规约说明
Modbus RTU通用规约说明、模板及规约配置

Modbus RTU通用规约说明、模板及规约配置说明文档一、Modbus RTU通用规约说明1.1Modbus协议简介Modbus协议最初由Modicon公司开发出来,在1979年末该公司成为施耐德自动化(Schneider Automation)部门的一部分,现在Modbus已经是工业领域全球最流行的协议。
此协议支持传统的串口链路RS-232、RS-422、RS-485和以太网设备。
许多工业设备包括PLC,DCS,智能仪表等都在使用Modbus协议作为他们之间的通讯标准。
Modbus协议包括ASCII、RTU、TCP等,并没有规定物理层。
此协议定义了控制器能够认识和使用的报文结构,而不管它们是经过何种网络进行通信的。
标准的Modicon控制器使用RS232C实现串行的Modbus。
Modbus的ASCII、RTU协议规定了报文、数据的结构、询问和应答的方式,数据通讯采用主/从方式,主站发出数据请求报文,从站接收到正确报文后就可以发送数据到主站端以响应请求;主站也可以直接发报文修改从站的数据,实现双向读写。
1.2Modbus通用规约介绍Modbus协议需要对数据进行校验,串行协议中除有奇偶校验外,ASCII模式采用LRC 校验,RTU模式采用16位CRC校验,但TCP模式没有额外规定校验,因为TCP协议是一个面向连接的可靠协议。
另外,Modbus采用主从问答方式收发数据,在实际使用中如果某从站站点断开后(如故障或失电),主站可以诊断出来,而当故障修复后,网络又可自动接通。
因此Modbus协议的可靠性较好。
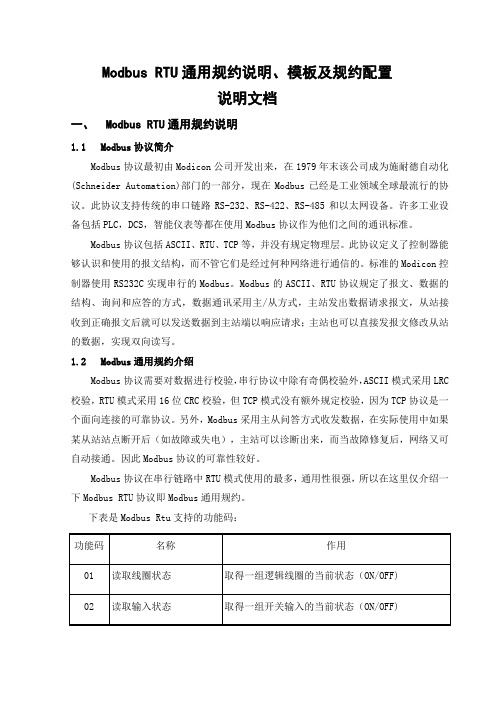
Modbus协议在串行链路中RTU模式使用的最多,通用性很强,所以在这里仅介绍一下Modbus RTU协议即Modbus通用规约。
下表是Modbus Rtu支持的功能码:在工程现场我们经常遇到第三方设备需要进行通信,如果是特殊规约,那就需要工自研究所专门做规约与模板。
如果是标准通信规约比如说CDT-91,MODBUS-RTU,103规约等,我们就可以根据厂家要到的规约与点表,自行配置模板进行通信。
MODBUS规约报文详细举例解析

MODBUS规约报文解析报文格式,报文全部为16进制,遥信状态需要转换为二进制:遥信报文1分析:发送数据:01 03 01 00 00 02 C5 F7 //16时14分02秒接收数据:01 03 04 03 03 00 00 0A 77 //16时14分02秒结果分析为:第1、2、9、10遥信合位。
遥信报文2分析:发送数据:01 03 01 00 00 02 C5 F7 //16时15分40秒接收数据: 01 03 04 12A2 00 00 5E A9 //16时15分40秒结果分析为:第2、6、8、10、13遥信合位遥信报文3分析:发送数据:01 03 01 00 00 02 C5 F7 //16时21分47秒接收数据:01 03 04 00 33 00 00 0A 3C //16时21分47秒结果分析为:第1、2、5、6遥信合位遥控点号:开关操作=0300H合操作TX: 01 06 03 00 00 02 08 4F //06表示遥控功能码,02表示分操作;RX: 01 06 03 00 00 02 08 4F //06表示遥控功能码,02表示分操作;遥控点号:开关操作=0300H 分操作TX: 01 06 03 00 00 01 48 4E //06表示遥控功能码,01表示分操作;RX: 01 06 03 00 00 01 48 4E //06表示遥控功能码,01表示分操作;遥测报文,每个遥测值占用2个字节,即1个寄存器,最大值为:0x0000H~0xFFFFH,即:0~65535。
发送数据:01 03 02 00 00 0D 85 B7 //16时27分02秒接收数据:01 03 1A 00 00 00 00 00 001E AE 00 00 1E AD1E AD 00 00 00 00 00 00 00 00 00 00 6A 96 77 67 //16时27分02秒电度报文分析:/********************伴随着总召换的电度主动上送****************************/ 共有4个电度:正向有功积分电度=0301H 10000.000(0x00989680),正向无功积分电度=0302H 0.000 (0x0),反向有功积分电度=0303H 0.000(0x0),反向无功积分电度=0304H 0.000(0x0)。
Modbus规约简介
1. RTU模式:当控制器设为在Modbus网络上 以RTU(远程终端单元)模式通信,在消 息中的每个8Bit字节包含两个4Bit的十六 进制字符。 优点:相对于ASCII模式,RTU模式表 达相同的信息需要较少的位数,且在相同 通讯速率下具有更大的数据流量。 因此通常情况下,一般工业智能仪器 仪表都是采用RTU模式的Modbus规约。
图1-18 主从查询-回应周期表
二.通讯方式 1.Modbus通讯协议有两种传送方式:RTU方 式和ASCII方式, 两种方式如下所示:
1. ASCII模式:当控制器设为在Modbus网络上以 ASCII(美国标准信息交换代码)模式通信,在 消息中的每个8Bit字节都作为一个ASCII字符发 送。这种方式的主要优点是字符发送的时间间 隔可达到1秒而不产生错误。
• Modbus TCP/IP为RTU模式的延伸: Modbus TCP/IP走的是基于Modbus 的以太网,Modbus可以通过以太网实现, 但必须是Modbus TCP/IP,接口方式不同, 驱动程序也与RTU模式不同。
2.Modbus RTU消息帧格式 :
每个MODBUS帧都包括地址域、功 能域、数据域、错误检测域 。
• Modbus规约简介
一.概念 Modbus 协议是应用于电子控制器上的 一种通用语言。通过此协议,控制器相互 之间、控制器经由网络(例如以太网、485 总线)和其它设备之间可以通信。它已经 成为一通用工业标准。有了它,不同厂商 生产的控制设备可bus协议采用主从工作方式,允许一台主 设备和多台从设备通信,每台从设备地址由用户 设定,地址范围为1-255。 通信采用命令/应答方式,每一种命令帧都对 应一个应答帧。命令帧由主设备发出,所有从设 备都将收到报文,但只有被寻址的从设备才会响 应相应命令,返回相应的应答帧。图1-18是一个 完整的主从查询-回应周期。
Modbus通讯规约
1.通讯参数和传输特性传输方式:异步串行通信方式。
MODBUS规约模式:RTU模式。
传输速率:2400 bps,4800bps,9600bps,19200bps。
串行口通讯数据格式:1 个起始位,8 个数据位, 无校验位,1个停止位。
最大传输距离:1200米。
通讯介质:推荐采用0.5mm的双绞线,不带屏蔽层。
(原因是如果使用屏蔽双绞线,但现场接地处理不好反而影响通讯质量)。
网络连接主站数目:1个。
网络连接从站数目:最多31个。
byte传输时间(帧间隔最小时间) + 10ms。
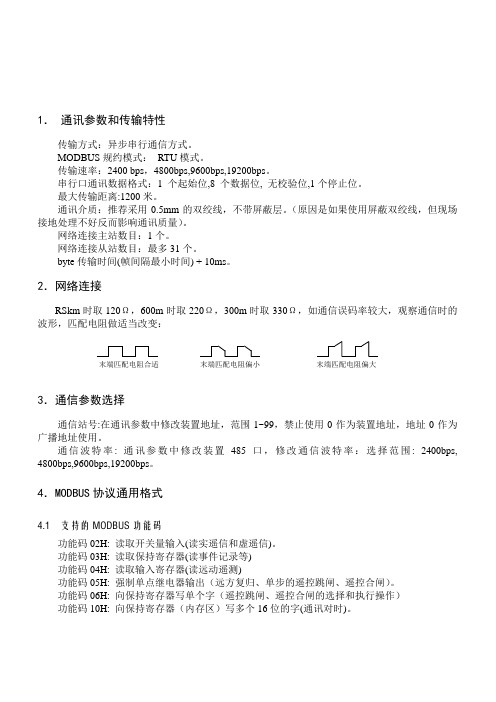
2.网络连接RSkm时取120Ω,600m时取220Ω,300m时取330Ω,如通信误码率较大,观察通信时的波形,匹配电阻做适当改变:末端匹配电阻合适末端匹配电阻偏小末端匹配电阻偏大3.通信参数选择通信站号:在通讯参数中修改装置地址,范围1~99,禁止使用0作为装置地址,地址0作为广播地址使用。
通信波特率: 通讯参数中修改装置485口,修改通信波特率:选择范围: 2400bps, 4800bps,9600bps,19200bps。
4.MODBUS协议通用格式4.1 支持的MODBUS功能码功能码02H: 读取开关量输入(读实遥信和虚遥信)。
功能码03H: 读取保持寄存器(读事件记录等)功能码04H: 读取输入寄存器(读远动遥测)功能码05H: 强制单点继电器输出(远方复归、单步的遥控跳闸、遥控合闸)。
功能码06H: 向保持寄存器写单个字(遥控跳闸、遥控合闸的选择和执行操作)功能码10H: 向保持寄存器(内存区)写多个16位的字(通讯对时)。
4.2 异常响应报文格式由于软件编程错误,对协议理解错误或通讯干扰等原因,MODBUS 通信子站接收到主站的报文后,可以采用异常响应报文给予回答,异常响应报文格式举例如下:子站通过校验,发现主站报文有问题,将响应报文将主站的功能码最高位(D7)置1,如例4.3 时间格式本规约中使用到的对时报文的时间格式,事件记录中的时间格式,参见下面说明。
MODBUS通用规约报文解析

Modbus通用规约说明说明文档文件名称Modbus通用规约说明文件说明无版本记录Modbus通用规约说明一、MODUBS协议简介Modbus协议最初由Modicon公司开发出来,在1979年末该公司成为施耐德自动化(Schneider Automation)部门的一部分,现在Modbus已经是工业领域全球最流行的协议。
此协议支持传统的串口链路RS-232、RS-422、RS-485和以太网设备。
许多工业设备包括PLC,DCS,智能仪表等都在使用Modbus协议作为他们之间的通讯标准。
Modbus协议包括ASCII、RTU、TCP等,并没有规定物理层。
此协议定义了控制器能够认识和使用的报文结构,而不管它们是经过何种网络进行通信的。
标准的Modicon控制器使用RS232C实现串行的Modbus。
Modbus的ASCII、RTU协议规定了报文、数据的结构、询问和应答的方式,数据通讯采用主/从方式,主站发出数据请求报文,从站接收到正确报文后就可以发送数据到主站端以响应请求;主站也可以直接发报文修改从站的数据,实现双向读写。
二、Modbus通用规约介绍Modbus协议需要对数据进行校验,串行协议中除有奇偶校验外,ASCII模式采用LRC 校验,RTU模式采用16位CRC校验,但TCP模式没有额外规定校验,因为TCP协议是一个面向连接的可靠协议。
另外,Modbus采用主从问答方式收发数据,在实际使用中如果某从站站点断开后(如故障或失电),主站可以诊断出来,而当故障修复后,网络又可自动接通。
因此Modbus协议的可靠性较好。
Modbus协议在串行链路中RTU模式使用的最多,通用性很强,所以在这里仅介绍一下Modbus RTU协议亦即Modbus通用规约。
下表是Modbus Rtu支持的功能码:功能码 名称 作用01 读取线圈状态 取得一组逻辑线圈的当前状态(ON/OFF)02 读取输入状态 取得一组开关输入的当前状态(ON/OFF)03 读取保持寄存器 在一个或多个保持寄存器中取得当前的二进制值04 读取输入寄存器 在一个或多个输入寄存器中取得当前的二进制值05 强置单线圈强置一个逻辑线圈的通断状态 06 预置单寄存器 把具体二进值装入一个保持寄存器07 读取异常状态 取得8个内部线圈的通断状态,这8个线圈的地址由控制器决定08 回送诊断校验把诊断校验报文送从机,以对通信处理进行评鉴 09 编程(只用于484) 使主机模拟编程器作用,修改PC 从机逻辑10 控询(只用于484) 可使主机与一台正在执行长程序任务从机通信,探询该从机是否已完成其操作任务,仅在含有功能码9的报文发送后,本功能码才发送11 读取事件计数可使主机发出单询问,并随即判定操作是否成功,尤其是该命令或其他应答产生通信错误时 12 读取通信事件记录 可是主机检索每台从机的ModBus 事务处理通信事件记录。
MODBUS规约简介

MODBUS规约简介0.概述MODBUS 规约是目前工控领域较为流行的串行通讯规约,因其简洁实用受到普遍使用。
该规约为主从型,即由一台主机分别对一台或多台从机的内部数据进行读写,从机只能应答主机的读写请求。
从机通过主机读写信文中的从机地址识别是否对本机的操作。
一次完整的通讯过程为:a)主机向从机发出读写命令;b)从机向主机发出应答信文;该规约将内部数据分为以下几类:——寄存器:与PLC中的寄存器相同,是字型数据,地址表达方式为4XXXX(即40001为1号寄存器,以下类似);——内部接点:与PLC中的内部线圈相同,是位型数据,地址表达方式为0XXXX;——开入点:相当于PLC中的开入映像表,是位型数据,地址表达方式为1XXXX;——模拟输入:相当于PLC中的模入映像表,是字型数据,地址表达方式为3XXXX;该规约在一次操作时只能对从机内部数据中一段连续的地址进行读写,信文中数据地址均从0开始(即1号寄存器在通讯信文中实际用地址0来表示),字型数据的传输字节顺序为先高后低(与INTEL规则相反)。
1.报文类型及格式通讯数据(信息帧)格式:数据格式:数据长度:通讯信息传输过程:当命令由主机发送至从机时,符合相应地址码的从机处理命令,根据功能码作相应任务。
如果CRC 校验无误,则执行相应的任务,然后把执行结果(数据)返送给主机。
如果CRC校验出错就不返回任何信息,主机应当有相应的超时处理。
如果接收正确,但不能处理,返回异常报文。
对字型数据发送顺序为先高字节后低字节。
对浮点数按照正常的顺序发送。
信文总长度(包括地址码和CRC校验码)不超过256字节。
1.1 地址码:地址码是通讯信息帧的第一字节,从0到255。
每个从机有唯一的地址码,并且只有符合地址码的从机才能响应回送信息。
0xFF为广播地址。
1.2 功能码:功能码是通讯信息帧的第二个字节。
ModBus通讯规约可定义的功能码范围为1~127,其中为用户预留的是65~72、100~110。
Modbus规约完整版

0
GB/T ××××—××××
第一部分:Modbus 协议
欢迎来到控制中文网
1 http://www.cechinamag.com
GB/T ××××—××××
第一部分:Modbus 协议
1 引言 1.1 范围
MODBUS 是 OSI 模型第 7 层上的应用层报文传输协议, 它在连接至不同类型总线或网络的设备 之间提供客户机/服务器通信。 自从 1979 年出现工业串行链路的事实标准以来, MODBUS 使成千上万的自动化设备能够通信。 目前,继续增加对简单而雅观的 MODBUS 结构支持。互联网组织能够使 TCP/IP 栈上的保留系统端 口 502 访问 MODBUS。 MODBUS 是一个请求/应答协议,并且提供功能码规定的服务。MODBUS 功能码是 MODBUS 请求/应答 PDU 的元素。本文件的作用是描述 MODBUS 事务处理框架内使用的功能码。 1.2 规范性引用文件
MODBUS 协议定义了一个与基础通信层无关的简单协议数据单元(PDU) 。特定总线或网络上 的 MODBUS 协议映射能够在应用数据单元(ADU)上引入一些附加域。
3
GB/T ××××—××××
ADU 地址域 功能码 PDU
图 3:通用 MODBUS 帧 启动 MODBUS 事务处理的客户机创建 MODBUS 应用数据单元。 功能码向服务器指示将执行哪 种操作。 MODBUS 协议建立了客户机启动的请求格式。 用一个字节编码 MODBUS 数据单元的功能码域。有效的码字范围是十进制 1-255(128-255 为 异常响应保留) 。当从客户机向服务器设备发送报文时,功能码域通知服务器执行哪种操作。 向一些功能码加入子功能码来定义多项操作。 从客户机向服务器设备发送的报文数据域包括附加信息,服务器使用这个信息执行功能码定义 的操作。这个域还包括离散项目和寄存器地址、处理的项目数量以及域中的实际数据字节数。 在某种请求中,数据域可以是不存在的(0 长度) ,在此情况下服务器不需要任何附加信息。功 能码仅说明操作。 如果在一个正确接收的 MODBUS ADU 中,不出现与请求 MODBUS 功能有关的差错,那么服 务器至客户机的响应数据域包括请求数据。如果出现与请求 MODBUS 功能有关的差错,那么域包 括一个异常码,服务器应用能够使用这个域确定下一个执行的操作。 例如, 客户机能够读一组离散量输出或输入的开/关状态, 或者客户机能够读/写一组寄存器的数 据内容。 当服务器对客户机响应时,它使用功能码域来指示正常(无差错)响应或者出现某种差错(称 为异常响应) 。对于一个正常响应来说,服务器仅对原始功能码响应。
MODBUS规约中文说明书
MODBUS 规约中文说明书说明:该文档是产品说明书的一部分,考虑到国内没有看到详细的MODBUS规约中文说明书,所以就把自己产品说明书的一部分内容译出来,作为MDOBUS规约中文说明书。
该说明书不是完整的MODBUS规约,但是却涵盖的几乎所有常用内容。
1. MODBUS规约MODBUS规约是MODICOM公司开发的一个为很多厂商支持的开放规约Modbus 协议是应用于电子控制器上的一种通用语言。
通过此协议,控制器相互之间、控制器经由网络(例如以太网)和其它设备之间可以通信。
它已经成为一通用工业标准。
有了它,不同厂商生产的控制设备可以连成工业网络,进行集中监控。
此协议定义了一个控制器能认识使用的消息结构,而不管它们是经过何种网络进行通信的。
它描述了控制器请求访问其它设备的过程,如果回应来自其它设备的请求,以及怎样侦测错误并记录。
它制定了消息域格局和内容的公共格式。
当在Modbus网络上通信时,此协议决定了每个控制器须要知道它们的设备地址,识别按地址发来的消息,决定要产生何种行动。
如果需要回应,控制器将生成反馈信息并用Modbus协议发出。
在其它网络上,包含了Modbus协议的消息转换为在此网络上使用的帧或包结构。
这种转换也扩展了根据具体的网络解决节地址、路由路径及错误检测的方法。
标准的Modbus口是使用RS-232C兼容串行接口,它定义了连接口的针脚、电缆、信号位、传输波特率、奇偶校验。
控制器能直接或经由Modem组网。
控制器通信使用主—从技术,即仅设备(主设备)能初始化传输(查询)。
其它设备(从设备)根据主设备查询提供的数据做出相应反应。
典型的主设备:主机和可编程仪表。
典型的从设备:可编程控制器。
主设备可单独和从设备通信,也能以广播方式和所有从设备通信。
如果单独通信,从设备返回消息作为回应,如果是以广播方式查询的,则不作任何回应。
Modbus协议建立了主设备查询的格式:设备(或广播)地址、功能代码、所有要发送的数据、错误检测域。
直流屏通讯协议

壁挂系统MODBUS通讯协议
采用RS232、RS485,1位起始位,8位数据位,无校验,1位停止位,波特率1200、2400、4800、9600 可设置。
1、遥测量
命令格式:
返回格式:
DATA数据定义:(44 bytes)
●数据格式:高位在前低位在后,BIT15=1表示负数) 模块3电流是否有,看系统硬件是否支
持3个模块
2、遥信量
命令格式:
返回:
3、错误响应
命令格式:
▲CODE:01 –功能码错
03 –数据错
▲COM:接收到的功能码、
实例:
发送:01 03 40 21
返回数据:01 03 08 09 00 00 00 00 08 00 00 D4 7F
(输出:230。
5V 模块一电流:0。
08A)
发送:01 04 01 E3
返回数据:01 04 02 18 26 32 EA
发送:01 06 00 82 09 20 2E 6A
发送:01 0F D7 01 00 00 3D BF
短路插座默认232接口。
监控后面空DB9的焊法:
RS232接口:监控1 - PC 5,监控3- PC 2,监控4-PC 3 。
如用485通信监控里面的短路插坐2。
3短路。
RS485接口:监控9- 485A 监控8- 485B。
MODBUS协议说明
智能三相电参数数据综合采集模块MODBUS通讯协议说明目录一、Modbus通讯规约简介二、Modbus-ASCII通讯协议说明三、Modbus-RTU通讯协议说明四、Modbus协议的功能码与所对应的数据表五、数据计算六、Modbus通讯规约介绍(一)MODBUS通讯规约简介(二)MODBUS的两种传输方式(三)Modbus消息帧(四)MODBUS通讯错误检测方法一、Modbus通讯规约简介支持的通讯规约有4种:(ASCII码)研华ADAM兼容通讯协议、十六进制LC-02协议、MODBUS-ASCII、MODBUS-RTU。
“MODBUS通讯协议说明”描述了串行口通讯的读、写命令格式及内部信息数据的定义,数据计算,以便第三方开发使用。
MODBUS通讯规约是与Modicon系统相兼容的Modbus通讯规约。
二、MODBUS-ASCII通讯协议说明1、2、MODBUS-ASCII协议中的通讯波特率:1200,2400,4800,9600,19200BPS。
3、4、MODBUS-ASCII协议格式:上位机发送::单元地址功能码起始地址读取点数LRC校验CR LF下位机响应::单元地址功能码字节数数据LRC校验CR LF命令格式:呼叫:AA FF SSSS NNNN LL <CR><LF>应答:AA FF XX HHHH..... LL<CR><LF>其中::为起始符AA 模块地址FF 功能号SSSS 起始通道NNNN 通道数XX 数据字节长度HHHH 数据字节LL 校验和<CR> 回车<LF> 换行5、功能码03:读保持寄存器,读测量数据数据起始地址:00~1E数据长度:1~0C ,超出范围无效;数据起始地址+数据长度不大于1F,超过范围命令无效。
说明:读取的是16位数据,高位在前,低位在后。
数据定义:见功能码与数据对照表1。
例1、读测量数据:命令: : 01 03 00 00 00 02 LRC <CR><LF> 17字节ADDR 功能开始地址寄存器个数 LRC校验响应: : 01 03 04 64 05 01 01 LRC <CR><LF> 19字节ADDR 功能数据字节长度 U0 I0 UBB IBB LRC校验6、功能码06:预臵单寄存器,设臵通讯地址、波特率、电压、电流变比数据起始地址: 0000或0001数据长度: 01 ,不等于01命令无效。
Modbus RTU通用规约说明、模板及规约配置(DOC)
Modbus RTU通用规约说明、模板及规约配置说明文档一、Modbus RTU通用规约说明1.1Modbus协议简介Modbus协议最初由Modicon公司开发出来,在1979年末该公司成为施耐德自动化(Schneider Automation)部门的一部分,现在Modbus已经是工业领域全球最流行的协议。
此协议支持传统的串口链路RS-232、RS-422、RS-485和以太网设备。
许多工业设备包括PLC,DCS,智能仪表等都在使用Modbus协议作为他们之间的通讯标准。
Modbus协议包括ASCII、RTU、TCP等,并没有规定物理层。
此协议定义了控制器能够认识和使用的报文结构,而不管它们是经过何种网络进行通信的。
标准的Modicon控制器使用RS232C实现串行的Modbus。
Modbus的ASCII、RTU协议规定了报文、数据的结构、询问和应答的方式,数据通讯采用主/从方式,主站发出数据请求报文,从站接收到正确报文后就可以发送数据到主站端以响应请求;主站也可以直接发报文修改从站的数据,实现双向读写。
1.2Modbus通用规约介绍Modbus协议需要对数据进行校验,串行协议中除有奇偶校验外,ASCII模式采用LRC 校验,RTU模式采用16位CRC校验,但TCP模式没有额外规定校验,因为TCP协议是一个面向连接的可靠协议。
另外,Modbus采用主从问答方式收发数据,在实际使用中如果某从站站点断开后(如故障或失电),主站可以诊断出来,而当故障修复后,网络又可自动接通。
因此Modbus协议的可靠性较好。
Modbus协议在串行链路中RTU模式使用的最多,通用性很强,所以在这里仅介绍一下Modbus RTU协议即Modbus通用规约。
下表是Modbus Rtu支持的功能码:在工程现场我们经常遇到第三方设备需要进行通信,如果是特殊规约,那就需要工自研究所专门做规约与模板。
如果是标准通信规约比如说CDT-91,MODBUS-RTU,103规约等,我们就可以根据厂家要到的规约与点表,自行配置模板进行通信。
MODBUS通讯规约文本

MODBUS-RTU通讯规约说明力创科技06-09-19目录一、MODBUS通讯协议简介二、通讯信息传输过程三、MODBUS功能码简介四、错误校验码(CRC校验)五、通讯错误信息及数据的处理附件:CRC校验算法程序一、MODBUS通讯协议简介:MODBUS协议是应用于电子控制器上的一种通用语言。
通过此协议,控制器相互之间、控制器经由网络(例如以太网)和其它设备之间可以通信。
它已经成为一通用工业标准。
有了它,不同厂商生产的控制设备可以连成工业网络,进行集中监控。
MODBUS通讯规约允许EDA系列模块/仪表/变送器与多个品牌的PLC、RTU、DCS等或与第三方具有MODBUS兼容的监控系统之间进行信息交换和数据通讯。
MODBUS是一个请求/应答协议,并且提供功能码规定的服务。
MODBUS是一种应用层报文传输协议,用于在通过不同类型的总线或网络连接的设备之间的客户机/服务器通信。
EDA系列模块/仪表/变送器提供了标准的RS-485/RS-232通讯接口及MODBUS-RTU通讯协议;EDA系列产品只要简单地增加一套基于计算机(或工控机)的监控软件(如:组态王、FIX等)就可构成一套电力监控系统。
注:MODBUS是Modicon公司的注册商标。
●数据编码:MODBUS使用最高有效字节在低地址存储的方式表示地址与数据项。
即当发送多个字节时,首先发送最高有效字节。
例如:寄存器大小值16位0x1234发送的第一字节为0x12然后发0x34●通讯数据的类型及格式:信息传输为异步方式,以字节为单位,每字节为10位的格式传输:字格式(串行数据)10位二进制起始位1位,0数据位8位,最低的有效位先发送奇偶校验位无停止位1位,1通讯数据(信息帧)格式:数据格式:地址码功能码数据区CRC校验数据长度:1字节1字节N字节16位CRC校验码(循环冗余码)数据字节:1个字节由8位二进制数(8Bit)组成。
CRC校验:CRC生成后,低字节在前,高字节在后。
--3132型一体化柜通讯规约(MODBUS规约)

直流屏MODBUS规约一、总则1、物理接口:RS485,波特率9600,字符格式采用偶校验位、8位数据位、1位停止位的异步串行通讯格式2、帧结构:采用Modbus规约的RTU方式,每个字节以2个十六进制数,有效的数据范围位0-9,A-F 地址:默认01功能码:支持功能码03(读数据)、06(设置数据)、功能码01(读线圈状态)、05(强制单个线圈)数据:上报或下设的数据,按寄存器(数据地址)进行发送,每一个寄存器由两个字节组成,关于寄存器的定义,请参阅下列数据地址的定义。
二、报文格式注:CRC校验码的计算方法:1、置一16位寄存器位全1;2、将报文数据的高位字节异或寄存器的低八位,存入寄存器;3、右移寄存器,最高位置0,移出的低八位存入标志位;4、如标志位是1,则用A001异或寄存器;如标志位是0,继续步骤3;5、重复步骤3和4,直至移位八位;6、异或下一位字节与寄存器;7、重复步骤3至5,直至所有报文数据均与寄存器异或并移位8次;8、此时寄存器中即为CRC校验码,最低位先发送;三、规约详解1、查询功能码03:遥测主机至RTU遥测命令:RTU至主机遥测量上传:2、查询功能码03:遥信主机至RTU遥信命令:RTU至主机遥信上传:3、设置功能码06设置命令帧格式响应命令帧格式:3、强制单个线圈功能码05 设置命令帧格式响应命令帧格式:注FF00H值请求线圈处于ON状态,0000H值请求线圈处于OFF状态,其它值对线圈无效,不起作用。
上位机如果读取设备不支持的数据地址或不存在的数据地址,设备不响应。
上位机如果设置设备不支持的数据地址或不存在的数据地址,设备不响应。
上位机如果下发设备不支持的功能码,则设备不响应。
每个模拟量(AI)用16Bit 表示,满量程65535 表示+6553.5,读回的16Bit 的AI 值Vh 和实际表示的AI 值Vf 的对应关系为:电压Vh/10 = Vf,精度为0.1;电流Vh/100 = Vf,精度为0.01。
直流屏MODBUS通讯规约

直流屏MODBUS通讯规约直流屏MODBUS通讯规约1、概述本文描述了直流屏上报的MODBUS通讯规约标准。
2、物理接口RS232,波特率9600,字符格式采用无校验位、8位数据位、1位停止位的异步串行通讯格式。
DOP-B07S201 COM3口。
地址:1功能码:只支持功能码03(读数据)数据:上报的数据,按寄存器(数据地址)进行发送,每个寄存器由两个字节组成,关于寄存器的定义,请参阅附录A。
CRC校验码:CRC(Cyclical Redundancy Check)对地址、功能码和数据进行校验,由两字节组成,CRC由传输设备生成,附加在数据帧中,如果由接收到数据计算出来的校验和附加在数据后的校验和不一致,则由错误发生。
关于CRC生成函数,请请参阅附录B。
4、命令解释:上位机发送数据查询命令信息帧,直流屏接收到正确的查询命令后,对命令进行响应回送数据给上位机。
格式如下:DI量地址和位定义附录B:CRC16校验的计算方法CRC(Cyclical Redundancy Check)由两字节组成,生成函数如下: WORD ModbusCRC(BYTE *pData,BYTE len){BYTE byCRCHi = 0xff;BYTE byCRCLo = 0xff;BYTE byIdx;WORD crc;While(len--){byIdx = byCRCHi *pData++;byCRCHi = byCRCLo gabyCRCHi[byIdx];byCRCLo = gabyCRCLo[byIdx];}crc = byCRCHi;crc <<= 8;crc += byCRCLo;return crc;}。
直流屏屏监控MODBUS上位机通讯规约

ANT-J021、协议概述z数据格式: 1位起始位8位数据位1位停止位无校验位z波特率: 1200BPS、2400BPS、4800BPS、9600BPS (缺省值)可供选择z通讯地址: 01~99,默认地址为01z Modbus协议支持RS232、RS485传输方式,设备出厂默认为RS232传输形式。
如需改变传输方式,则必须卸下监控器后盖壳,改变JP1上的跳线(左:RS485、右:RS232)具体接口定义如下:ANT-J02插座方式:DB9公头RXD:2脚TXD:3脚GND:5脚插座方式:DB9公头485A:6脚485B:7脚z数据包组织说明:⑴.本协议中涉及到的CRC校验皆是对本帧中所有数据的校验,且校验位在传输时低位在前,高位在后。
⑵.本协议中的模拟量均采用Word表示。
Bit15为符号位(0:正数,1:负数),Bit0~Bit14为数据位(数据部分均用原码表示),所以Word的取值范围:-32768 ~ +32768,模拟量在传输时高位在前,低位在后。
⑶.下面表格中Unit列中的系数单位即为对应模拟量的放大系数及单位。
将收到的数据帧转化为十进制数,再乘以对应的系数单位,就可得到该模拟量的实测数据,例如:模拟量收到帧数据系数单位实测数据V 243.5V一段合母电压0983H 0.1A -10.2A一段电池电流8066H 0.1V 13.48V 一组电池001节电压0544H 0.01⑷.遥信量数据表‘报警’栏中具体含义如下:Y 表示报警量,综合自动化需作报警处理。
=1,故障;=0,正常。
N 表示状态量,综合自动化不作报警处理。
2、遥测量一(电源参数)命令格式:Slave Addr Function Star Addr Length CRC Check16CRC01H 03H 0000H 0024H返回数据:Slave Addr Function Length Data CRC CheckBytes CRC1601H 03H 48H 48数据定义(48 Bytes):Unit AddrHex Define Type0.1V0000H 交流1一路AB线电压 Word0.1V0001H 交流1一路BC线电压 Word0.1V0004H 交流1一路CA线电压 Word0.1V0003H 交流1二路AB线电压 Word0.1V0004H 交流1二路BC线电压 Word0.1V0005H 交流1二路CA线电压 Word0.1A0006H 交流1电流 Word0007H 一组电池电压 Word0.1V0.1V0008H 一段合母电压 Word0009H 一段控母电压 Word0.1V0.1A 000AH 一组电池电流 Word0.1A 000BH 一段控母电流 Word0.1V 000CH 二组电池电压 Word0.1V 000DH 二段合母电压 Word0.1V000EH 二段控母电压 Word0.1A 000FH 二组电池电流 Word0.1A 0010H 二段控母电流 Word0.1℃0011H 环境温度 Word0.1 0012H 扩展测量1 Word0.1 0013H 扩展测量2 Word0.1 0014H 扩展测量3 Word0015H 扩展测量4 Word0.10.1V0016H 交流2一路AB线电压 Word0.1V0017H 交流2一路BC线电压 Word0.1V0018H 交流2一路CA线电压 Word0.1V0019H 交流2二路AB线电压 Word0.1V001AH 交流2二路BC线电压 Word001BH 交流2二路CA线电压 Word0.1V0.1V 001CH 交流2电流 Word0.1V001DH 交流3一路AB线电压 Word001EH 交流3一路BC线电压 Word0.1V0.1V001FH 交流3一路CA线电压 Word0.1V0020H 交流3二路AB线电压 Word0.1V0021H 交流3二路BC线电压 Word0.1V0022H 交流3二路CA线电压 Word0.1V 0023H 交流3电流 Word3、遥测量二(电池组1巡检)命令格式:Slave Addr Function Star Addr Length CRC Check01H 03H 0100H 0070H CRC16 返回数据:Slave Addr Function Length Data CRC Check01H 03H E0H 112 Bytes CRC 16 数据定义(112 Bytes):Unit AddrHex Define Type0100H 一组电池001节电压Word 0.01V0101H 一组电池002节电压Word 0.01V...............016EH 一组电池111节电压Word 0.01V016FH 一组电池112节电压Word 0.01V4、遥测量三(电池组2巡检)命令格式:Slave Addr Function Star Addr Length CRC Check01H 03H 0200H 0070H CRC16 返回数据:Slave Addr Function Length Data CRC Check01H 03H E0H 112 Bytes CRC 16 数据定义(112 Bytes):AddrHex Define Type Unit 0200H 二组电池001节电压 Word 0.01V 0201H 二组电池002节电压Word 0.01V ... ............026EH 二组电池111节电压 Word 0.01V 026FH二组电池112节电压Word 0.01V5、 遥信量一(基本遥信量) 命令格式:Slave AddrFunctionStar AddrBits LengthCRC Check01H 04H 0300H 0040H CRC 16返回数据:Slave Addr Function Length Data CRC Check 01H04H08H8 BytesCRC 16数据定义:(8 Bytes) 字节 位内容报警字节位内容报警BIT0 交流1一路故障 Y BIT0模块故障 Y BIT1 交流1二路故障 Y BIT1模块通讯故障 Y BIT2 交流1一路工作 N BIT2一段控制开关故障 Y BIT3 交流1二路工作 N BIT3一段合闸开关故障 Y BIT4 交流1防雷故障 Y BIT4二段控制开关故障 Y BIT5 交流1开关故障 Y BIT5二段合闸开关故障 Y BIT6 交流1通讯故障 Y BIT6开关监控通讯故障 Y 0300BIT7/N0301BIT7/NBIT0 一段合母过压 Y BIT0二段合母过压 Y BIT1 一段合母欠压 Y BIT1二段合母欠压 Y BIT2 一段控母过压Y BIT2二段控母过压 Y BIT3 一段控母欠压 Y BIT3二段控母欠压 Y BIT4 一组电池欠压 Y BIT4二组电池欠压 Y BIT5 一组电池均充 N BIT5二组电池均充 N BIT6 直流监控通讯故障 Y BIT6/ N 0302BIT7/N 0303BIT7/N BIT0 电池开关故障 Y BIT0一组单体电池过压 Y BIT1 熔断器故障 Y BIT1一组单体电池欠压 Y BIT2 外接设备故障Y BIT2一组单体电池差压 Y BIT3 一段差压报警 Y BIT3二组单体电池过压 Y BIT4 二段差压报警 Y BIT4二组单体电池欠压 Y BIT5 一段绝缘故障 Y BIT5二组单体电池差压 Y BIT6 二段绝缘故障 Y BIT6/N 0304BIT7 绝缘检测通讯故障 Y 0305BIT7电池巡检通讯故障 Y BIT0 交流2一路故障 Y BIT0交流3一路故障 Y BIT1 交流2二路故障 Y BIT1交流3二路故障 Y BIT2 交流2一路工作N BIT2交流3一路工作 N BIT3 交流2二路工作 N BIT3交流3二路工作 N BIT4 交流2防雷故障 Y BIT4交流3防雷故障 Y BIT5 交流2开关故障 Y BIT5交流3开关故障 Y BIT6 交流2通讯故障 Y BIT6交流3通讯故障 Y 0306BIT7/0307BIT7/注:交流工作状态 0:工作,1:备用电池充电状态 0:浮充,1:均充6、 遥信量二(补充遥信量) 命令格式:Slave AddrFunctionStar AddrBits LengthCRC Check01H 04H 0400H 00C0H CRC 16返回数据:Slave Addr Function Length Data CRC Check 01H04H18H24 BytesCRC 16数据定义:(24 Bytes) 字节 位内容报警字节位内容报警BIT0 交流监控1通讯故障 Y BIT0开关量监控1通讯故障 Y BIT1 交流监控2通讯故障 Y BIT1开关量监控2通讯故障 Y BIT2 交流监控3通讯故障 YBIT2开关量监控3通讯故障 YBIT3 直流监控通讯故障 Y BIT3开关量监控4通讯故障 YBIT4 电池巡检1通讯故障 Y BIT4绝缘检测1通讯故障 YBIT5 电池巡检2通讯故障 Y BIT5绝缘检测2通讯故障 Y BIT6 电池巡检3通讯故障 Y BIT6绝缘检测3通讯故障 Y 0400 BIT7 电池巡检4通讯故障 Y 0401BIT7绝缘检测4通讯故障 YBIT0 01#(1组)模块通讯故障 Y BIT009#模块通讯故障 Y BIT1 02#(2组)模块通讯故障 Y BIT110#模块通讯故障 Y BIT2 03#(3组)模块通讯故障 Y BIT211#模块通讯故障 Y BIT3 04#(4组)模块通讯故障 Y BIT312#模块通讯故障Y BIT4 05#(5组)模块通讯故障 Y BIT413#模块通讯故障 Y BIT5 06#模块通讯故障 Y BIT514#模块通讯故障 Y BIT6 07#模块通讯故障 Y BIT615#模块通讯故障 Y 0402BIT7 08#模块通讯故障 Y0403BIT716#模块通讯故障Y BIT0 17#模块通讯故障Y BIT025#模块通讯故障 Y 0404 BIT1 18#模块通讯故障Y0405BIT126#模块通讯故障YBIT2 19#模块通讯故障 Y BIT227#模块通讯故障 Y BIT3 20#模块通讯故障 Y BIT328#模块通讯故障 Y BIT4 21#模块通讯故障 Y BIT429#模块通讯故障 Y BIT5 22#模块通讯故障 Y BIT530#模块通讯故障 Y BIT6 23#模块通讯故障 Y BIT631#模块通讯故障 Y BIT7 24#模块通讯故障 Y BIT732#模块通讯故障 Y BIT0 01#(1组1#)模块故障Y BIT009#(2组1#)模块故障Y BIT1 02#(1组2#)模块故障Y BIT110#(2组2#)模块故障Y BIT2 03#(1组3#)模块故障Y BIT211#(2组3#)模块故障Y BIT3 04#(1组4#)模块故障Y BIT312#(2组4#)模块故障Y BIT4 05#(1组5#)模块故障Y BIT413#(2组5#)模块故障Y BIT5 06#模块故障 Y BIT514#模块故障 Y BIT6 07#模块故障 Y BIT615#模块故障 Y 0406BIT7 08#模块故障Y0407BIT716#模块故障Y BIT0 17#(3组1#)模块故障Y BIT025#(4组1#)模块故障Y BIT1 18#(3组2#)模块故障Y BIT126#(4组2#)模块故障Y BIT2 19#(3组3#)模块故障Y BIT227#(4组3#)模块故障Y BIT3 20#(3组4#)模块故障Y BIT328#(4组4#)模块故障Y BIT4 21#(3组5#)模块故障Y BIT429#(4组5#)模块故障Y BIT5 22#模块故障 Y BIT530#模块故障 Y BIT6 23#模块故障 Y BIT631#模块故障 Y 0408BIT7 24#模块故障 Y0409BIT732#模块故障Y BIT0 一段控制开关01跳闸 Y BIT0一段控制开关09跳闸 Y BIT1 一段控制开关02跳闸 Y BIT1一段控制开关10跳闸 Y BIT2 一段控制开关03跳闸Y BIT2一段控制开关11跳闸 Y BIT3 一段控制开关04跳闸 Y BIT3一段控制开关12跳闸Y BIT4 一段控制开关05跳闸 Y BIT4一段控制开关13跳闸 Y BIT5 一段控制开关06跳闸 Y BIT5一段控制开关14跳闸 Y BIT6 一段控制开关07跳闸 Y BIT6一段控制开关15跳闸 Y 040ABIT7 一段控制开关08跳闸Y040BBIT7一段控制开关16跳闸Y 040C BIT0 一段控制开关17跳闸Y 040D BIT0一段控制开关25跳闸YBIT2 一段控制开关19跳闸 Y BIT2一段控制开关27跳闸 Y BIT3 一段控制开关20跳闸 Y BIT3一段控制开关28跳闸 Y BIT4 一段控制开关21跳闸 Y BIT4一段控制开关29跳闸 Y BIT5 一段控制开关22跳闸 Y BIT5一段控制开关30跳闸 Y BIT6 一段控制开关23跳闸 Y BIT6一段控制开关31跳闸 Y BIT7 一段控制开关24跳闸 Y BIT7一段控制开关32跳闸 Y BIT0 一段合闸开关01跳闸 Y BIT0一段合闸开关09跳闸 Y BIT1 一段合闸开关02跳闸 Y BIT1一段合闸开关10跳闸 Y BIT2 一段合闸开关03跳闸 Y BIT2一段合闸开关11跳闸 Y BIT3 一段合闸开关04跳闸 Y BIT3一段合闸开关12跳闸Y BIT4 一段合闸开关05跳闸 Y BIT4一段合闸开关13跳闸 Y BIT5 一段合闸开关06跳闸 Y BIT5一段合闸开关14跳闸 Y BIT6 一段合闸开关07跳闸 Y BIT6一段合闸开关15跳闸 Y 040EBIT7 一段合闸开关08跳闸 Y040FBIT7一段合闸开关16跳闸Y BIT0 二段控制开关01跳闸 Y BIT0二段控制开关09跳闸 Y BIT1 二段控制开关02跳闸 Y BIT1二段控制开关10跳闸 Y BIT2 二段控制开关03跳闸 Y BIT2二段控制开关11跳闸 Y BIT3 二段控制开关04跳闸 Y BIT3二段控制开关12跳闸Y BIT4 二段控制开关05跳闸 Y BIT4二段控制开关13跳闸 Y BIT5 二段控制开关06跳闸 Y BIT5二段控制开关14跳闸 Y BIT6 二段控制开关07跳闸 Y BIT6二段控制开关15跳闸 Y 0410BIT7 二段控制开关08跳闸 Y0411BIT7二段控制开关16跳闸Y BIT0 二段控制开关17跳闸 Y BIT0二段控制开关25跳闸 Y BIT1 二段控制开关18跳闸 Y BIT1二段控制开关26跳闸 Y BIT2 二段控制开关19跳闸 Y BIT2二段控制开关27跳闸 Y BIT3 二段控制开关20跳闸 Y BIT3二段控制开关28跳闸Y BIT4 二段控制开关21跳闸 Y BIT4二段控制开关29跳闸 Y BIT5 二段控制开关22跳闸 Y BIT5二段控制开关30跳闸 Y BIT6 二段控制开关23跳闸 Y BIT6二段控制开关31跳闸 Y 0412BIT7 二段控制开关24跳闸Y0413BIT7二段控制开关32跳闸YBIT1 二段合闸开关02跳闸 Y BIT1二段合闸开关10跳闸 Y BIT2 二段合闸开关03跳闸 Y BIT2二段合闸开关11跳闸 Y BIT3 二段合闸开关04跳闸 Y BIT3二段合闸开关12跳闸Y BIT4 二段合闸开关05跳闸 Y BIT4二段合闸开关13跳闸 Y BIT5 二段合闸开关06跳闸 Y BIT5二段合闸开关14跳闸 Y BIT6 二段合闸开关07跳闸 Y BIT6二段合闸开关15跳闸 Y 0414BIT7 二段合闸开关08跳闸 Y0415BIT7二段合闸开关16跳闸Y BIT0 33#(5组1#)模块故障Y BIT033#(5组1#)模块故障Y BIT1 34#(5组2#)模块故障Y BIT134#(5组2#)模块故障Y BIT2 35#(5组3#)模块故障Y BIT235#(5组3#)模块故障Y BIT3 36#(5组4#)模块故障Y BIT336#(5组4#)模块故障Y BIT4 37#(5组5#)模块故障Y BIT437#(5组5#)模块故障Y BIT5 38#模块通讯故障 Y BIT538#模块故障 Y BIT6 39#模块通讯故障 Y BIT639#模块故障 Y 0416BIT7 40#模块通讯故障Y0417BIT740#模块故障Y7、 遥调量 命令格式:A :设置控母输出电压Slave Addr Function Data Reg Data Value CRC Check 01H06H0002H2 BytesCRC 16B :设置均充电压Slave Addr Function Data Reg Data Value CRC Check 01H06H0004H2 BytesCRC 16C :设置浮充电压Slave Addr Function Data Reg Data Value CRC Check 01H06H0006H2 BytesCRC 16返回数据:Slave Addr Function Data Reg Data Value CRC Check 01H 06H 2 Bytes 2 Bytes CRC 168、遥控量命令格式:Slave Addr Function Reg Addr Quantity Byte Cnt Data StatusCRCCheck01H 0FH 2 Bytes 0001H 01H 1 Byte CRC 16 数据定义:Data Status AddrHex Define00H 01H 0101H 一组电池浮充均充0102H 二组电池浮充均充0103H 模块1(1组01号模块)开关机关机开机0104H 模块2(1组02号模块)开关机关机开机0105H 模块3(1组03号模块)开关机关机开机0106H 模块4(1组04号模块)开关机关机开机0107H 模块5(1组05号模块)开关机关机开机0108H 模块6(2组01号模块)开关机关机开机0109H 模块7(2组02号模块)开关机关机开机010AH 模块8(2组03号模块)开关机关机开机010BH 模块9(2组04号模块)开关机关机开机010CH 模块10(2组05号模块)开关机关机开机010DH 模块11(3组01号模块)开关机关机开机010EH 模块12(3组02号模块)开关机关机开机010FH 模块13(3组03号模块)开关机关机开机0110H 模块14(3组04号模块)开关机关机开机0111H 模块15(3组05号模块)开关机关机开机0112H 模块16(4组01号模块)开关机关机开机0113H 模块17(4组02号模块)开关机关机开机0114H 模块18(4组03号模块)开关机关机开机0115H 模块19(4组04号模块)开关机关机开机0116H 模块20(4组05号模块)开关机关机开机0117H 模块21(5组01号模块)开关机关机开机0118H 模块22(5组02号模块)开关机关机开机0119H 模块23(5组03号模块)开关机关机开机011AH 模块24(5组04号模块)开关机关机开机011BH 模块25(5组05号模块)开关机关机开机011CH 模块26开关机关机开机011DH 模块27开关机关机开机011EH 模块28开关机关机开机011FH 模块29开关机关机开机0120H 模块30开关机关机开机0121H 模块31开关机关机开机0122H 模块32开关机关机开机0123H 模块33开关机关机开机0124H 模块34开关机关机开机0125H 模块35开关机关机开机0126H 模块36开关机关机开机0127H 模块37开关机关机开机0128H 模块38开关机关机开机0129H 模块39开关机关机开机012AH 模块40开关机关机开机返回数据:地址功能码Addr Quantity CRC校验01H 0FH 2 Bytes 2 Bytes CRC 169、错误响应返回格式:Slave Addr Function Code CRC Check01H COM+80H 1 Byte CRC 16z CODE:01 – 功能码错03 – 数据错z COM:接收到的功能码10、实例假设监控器通讯地址设置为01取遥测量一(电源参数)01 03 00 00 00 24 45 D1取遥测量二(1组电池单体电压)01 03 01 00 00 70 45 D2取遥测量三(2组电池单体电压)01 03 02 00 00 70 45 96取遥信量一(基本遥信量)01 04 03 00 00 40 F1 BE取遥信量二(补充遥信量)01 04 04 00 00 C0 F1 6A控制一组电池均充01 0F 01 01 00 01 01 01 D3 46控制一组电池浮充01 0F 01 01 00 01 01 00 12 86控制3#模块关机01 0F 01 05 00 01 01 00 E3 46控制3#模块开机01 0F 01 05 00 01 01 01 22 86遥调控母电压为225V 01 06 00 02 08 CA AF 9D遥调控母电压为220V 01 06 00 02 08 98 2E 60遥调均充电压为254V 01 06 00 04 09 EC CF D6遥调均充电压为248V 01 06 00 04 09 B0 CF EF遥调浮充电压为243V 01 06 00 06 09 7E EF BB遥调浮充电压为238V 01 06 00 06 09 4C 6E 6E。
modbus规约解析
modbus规约解析1. 什么是Modbus规约?Modbus是一种通信协议,用于在工业自动化领域中传输数据。
它是一种开放的通信协议,可以在不同的硬件和软件平台之间进行通信。
Modbus协议通常用于连接PLC、传感器、电机、变频器等设备。
2. Modbus规约的特点Modbus规约具有以下特点:(1)简单易用:Modbus规约的指令格式非常简单,易于理解和实现。
(2)开放性:Modbus规约是一种开放的通信协议,可以在不同的硬件和软件平台之间进行通信。
(3)灵活性:Modbus规约支持不同的通信方式,包括串口、以太网等。
(4)可靠性:Modbus规约具有良好的容错性和可靠性,能够保证数据传输的稳定性和可靠性。
3. Modbus规约的工作原理Modbus规约的工作原理如下:(1)Modbus规约采用主从结构。
主机向从机发送请求,从机响应请求并返回数据。
(2)Modbus规约的指令格式包括功能码、数据地址、数据长度和校验码等。
(3)Modbus规约支持不同的通信方式,包括串口、以太网等。
(4)Modbus规约支持多种数据类型,包括位、字节、整数、浮点数等。
4. Modbus规约的应用Modbus规约广泛应用于工业自动化领域,包括以下应用场景:(1)PLC控制系统:Modbus规约可以用于连接PLC和其他设备,实现数据的传输和控制。
(2)传感器网络:Modbus规约可以用于连接传感器网络,实现数据的采集和传输。
(3)电机控制系统:Modbus规约可以用于连接电机控制系统,实现数据的传输和控制。
(4)变频器控制系统:Modbus规约可以用于连接变频器控制系统,实现数据的传输和控制。
5. Modbus规约的发展趋势随着工业自动化技术的不断发展,Modbus规约也在不断发展和完善。
未来,Modbus规约将更加智能化和自适应,能够更好地满足工业自动化领域的需求。
同时,Modbus规约也将更加开放和互联,能够更好地支持不同的硬件和软件平台之间的通信。
MODBUS规约简介

MODBUS规约简介
MODBUS规约是规约的一种类型,但并不是一种具体的规约,即不同的厂家、不同的产品都可以使用MODBUS规约,但这些MODBUS规约并不通用,但各个厂家的MODBUS 规约都应遵循MODBUS规约基本原则,否则就不能称为MODBUS规约。
MODBUS规约基本原则:
1.读数据:从地址为ADDR的模块的MEMADDR处读取DATANUM个寄存器,其中,SEL的每个寄存器为2个字节。
则该报文可表示如下:
错误代码暂无资料
2.写数据:暂无SEL资料
由于SEL本身也可以进行逻辑编程及进行不同的设置,不同的厂家对SEL进行设置的参数也不同,因此,虽然同样是针对SEL2020通讯,也可能出现几种不同的通讯版本。
因此与SEL调试时通常需要双方配合才行。
附:校验码算法:
1.取一个字WORDCRC=0XFFFF
2.WORDCRC 和第一个字节异或,异或值放在WORDCRC中
3.WORDCRC 右移一位
4.如果移出的这一位为1 ,则WORDCRC和OXA001异或,否则向下进行
5.重复3,4 八次
6.取下一个字节和WORDCRC异或
7.重复3到6,直到校验码前一个字节为止
8.把最后的校验结果--一个字,低位放前,高位放后
附:由于没有设备,无法提供具体报文格式,深表歉意。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
FALSE:表示一个遥测由两个字节组成。 ¾ 遥测除系数标志
TRUE: 遥测值需要进行除系数处理,可避免遥测数据溢出。 FALSE:遥测值不除系数。 ¾ 遥测系数值 按遥测的顺序,设置相应的系数值(1~10000 之间的数)。 ¾ 发送报文间隔时间 每次发送报文的时间间隔,单位[秒],范围 1~120,默认 1。 ¾ 接收报文超时时间 发送报文后,等待到该长度时间未收到报文,认为接收超时,范围 1~120, 默认 3 秒。 ¾ 是烟台东方玉麟直流屏 MODBUS(效验码不同) TRUE: 效验码按烟台东方玉麟直流屏 MODBUS 效验格式计算。 FALSE:效验码按常规 CRC-16 效验。 ¾ 是杭州中恒电气直流屏 MODBUS(遥信处理不同) TRUE: 遥信按杭州中恒电气直流屏要求处理。 FALSE:遥信按常规处理。 ¾ 是否使用遥信/遥测命令表中入库偏移定义(缺省:使用) TRUE: 程序在处理接收到的遥测、遥信入库时,使用该命令表中相应的入库偏
/遥测命令表中入库偏移定义(缺省:使用)”说明。 d:遥信个数-----------遥信数据个数,也是查询报文中的“寄存器数量”。 e: 装置地址-----------智能设备地址(填 255 表示忽略该域,取节点地址) ¾ 遥测命令数(最大 16 条) 申请遥测数据命令组个数。 ¾ 遥测命令表(下面数据需将十六进制数转为十进制数填入) a: 遥测功能码---------申请遥测数据的功能码 b: 遥测地址-----------遥测数据的起始寄存器地址 c: 入库偏移-----------第一个遥测入库的位置,见最后一项“是否使用遥信
资料版本号 V1.0
直流屏上送遥测数据,0x40 长度,共 32 个遥测量。
4.2 NscAssist 调试工具中显示的信息 1)、 PAR 文件读取失败时,会在相应的串口通道中显示“组态参数读取失败,请重新 配置(返回码)”。 2)、 PAR 文件读取成功时,会在相应的串口通道中显示“dcmodbus.par 参数文件读 取成功”。 3)、 如接收到的报文效验码出错时,会在相应的串口通道中显示“校验出错(地址)”。 4)、 如超时未收到报文时,会在相应的串口通道中显示“接收超时(地址)”。
2 通讯规约设置
通讯规约的设置比较简单,只须用 NscAssit 通讯组态软件在所需的串口选用“直流屏 类”“直流屏 MODBUS 规约”,再设置相应的串口通信参数即可,如波特率、校验方式、传输 方式、遥控方式、数据位、停止位、通讯方式等。
每一串口都可以设置为本规约,但为节省资源,本程序支持的最大串口个数是 4,故实 际使用时设置本规约的串口数不得超过 4 个。
功能 码
2
第一个寄存 器的高位地 址
3主机请求(下发)源自第一个寄存 器的低位地 址
寄存器数 量的高位
4
5
寄存器数 量的地位
6
效验低 位
7
效验高 位
8
地址
功能 码
字节数 n
12
3
从机应答(上送)
数据 1 数据 2 ……
4
5 ……
数据 n n+3
效验低 位
n+4
效验高 位
n+5
效验方式为 CRC-16(循环冗余错误校验)。
移定义存入数据。 FALSE:程序根据装置应答的数据长度自动计算入库的偏移存入数据。
4 调试方法
4.1 报文示例分析(mbusdcs.par 按默认值配置) 4.1.1 总控查询遥信信息
01 01 00 00 00 20 3D D2 总控下发遥信查询命令,查询地址 0000 开始的共 32 个遥信。 01 01 04 01 00 B0 01 4E 2D 直流屏上送遥信数据,04 长度,01 00 B0 01 为 32 个遥信值。 4.1.2 总控查询遥测信息 01 03 10 00 00 20 40 d2 总控下发遥测查询命令,查询地址 0X1000 开始共 32 个遥测 01 03 40 64 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 D0 C3
3 dcmodbus.par 参数文件设置
¾ 直流屏名称描述 标识各种 Modbus 协议的智能设备。
¾ 遥信命令数(最大 16 条)
申请遥信数据命令组个数。 ¾ 遥信命令表(下面数据需将十六进制数转为十进制数填入)
a: 遥信功能码---------申请遥信数据的功能码 b: 遥信地址-----------遥信数据的起始寄存器地址 c: 入库偏移-----------第一个遥信入库的位置,见最后一项“是否使用遥信
5 规约简介
Modbus 协议是应用于电子控制器上的一种通用通信语言,通过此协议,控制器相互之 间、控制器经由网络和其它设备之间可以通信。它已经成为一通用工业标准。通讯遵循主- 从方式,即仅由一主设备进行初始化传输(查询),其它从设备根据主设备查询提供的信息 作出相应响应。具体通讯报文格式如下:
地址 1
/遥测命令表中入库偏移定义(缺省:使用)”说明。 d:遥测个数-----------遥测数据个数,也是查询报文中的“寄存器数量”。 e: 装置地址-----------智能设备地址(填 255 表示忽略该域,取节点地址) ¾ 是否 RS-485 方式 TRUE: RS-485 方式,多发一个 0xff 字节用于切换。 FALSE:RS-232/422 通讯方式。 ¾ 遥测是否高位在前 TRUE: 报文中遥测数据高位在前。 FALSE:报文中遥测数据高位在后。 ¾ 遥测是否 BCD 码 TRUE: 是 BCD 码。 FALSE:是十六进制码。 ¾ 遥信是否字节值 TRUE: 一个遥信量用一个字节表示。 FALSE:一个字节表示 8 个遥信。 ¾ 遥信“合”状态的位号或字节值 该变量用于一个字节表示一个遥信量方式,若变量值小于 8 表示遥信字节相对 应的位表示遥信状态,若变量值大于等于 1000,表示如果遥信字节值=变量值 -1000,该遥信为合位。 ¾ 遥测是否是四字节长度 TRUE: 表示一个遥测由四个字节组成。
通用直流屏 MODBUS 规约
1 概述
本规约用于总控和采用 MODBUS 规约的智能装置之间通讯,是一种问答式通讯规约。 Modbus 协议是应用于电子控制器上的一种通用语言,程序参考的规约文本是通用的 Modbus 协议,由于不同厂家的所使用的 MODBUS 协议数据格式有所不同,本总控程序可通过组态配 置文件 dcmodbus.par,针对不同厂家 MODBUS 协议数据格式进行灵活配置,可适应现场通讯 各种不同要求。本规约程序目前仅支持对智能装置的遥测及遥信信息的读取。