基于静态图像的CCD激光测距方法的研究_田原嫄
基于图像传感器的激光测距方法研究
摘要 : 针对 传统接 触 式测距 方 法的局 限性 , 介 绍
前 在激 光测距 领域 , 我 国和 发 达 国家 的技 术差 距 还
了一种根 据光 学三 角法利 用 图像 传 感器近 距 离测距
的 方 法 。 通 过 半 导 体 激 光 器 发 出的 光 经 过 物 体 反 射
比较大 。因此 , 研 制开发 能耗低 , 精 度高 的小 型激光 测距 仪是 亟待 解决 的 问题 。
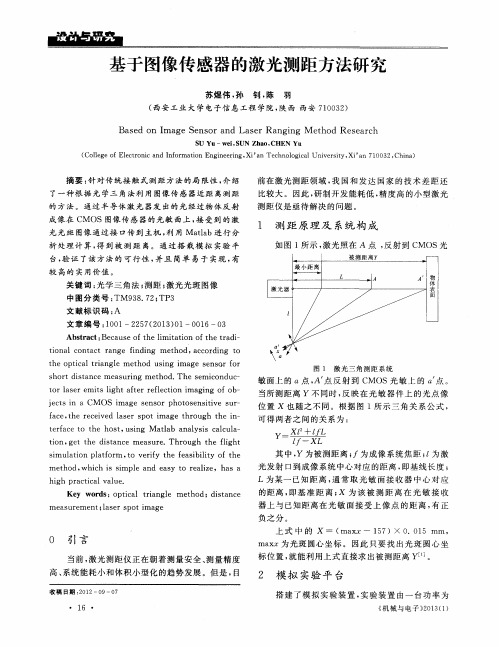
图 1 激 光 三 角 测距 系统
敏面上 的 a点 , A 点反射到 C MOS光 敏 上 的 a 点。
t o r l a s e r e mi t s l i g h t a f t e r r e f l e c t i o n i ma g i n g o f o b —
Ab s t r a c t : Be c a u s e o f t h e l i mi t a t i o n o f t h e t r a di — t i o na l c o n t a c t r a ng e f i nd i ng m e t ho d, a c c o r di n g t o t h e o p t i c a l t r i a n gl e me t h od us i ng i ma g e s e ns or f o r s h o r t d i s t a nc e me a s ur i n g me t ho d . The s e mi c on du c —
f a c e, t he r e c e i v e d l a s e r s p o t i ma ge t hr ou g h t he i n— t e r f a c e t O t he ho s t , u s i ng Ma t l a b a n a l ys i s c a l c u l a — t i o n, g e t t h e d i s t a n c e me a s u r e .Thr o ug h t he f l i gh t s i m ul a t i o n pl a t f o r m, t o ve r i f y t he f e a s i bi l i t y o f t h e
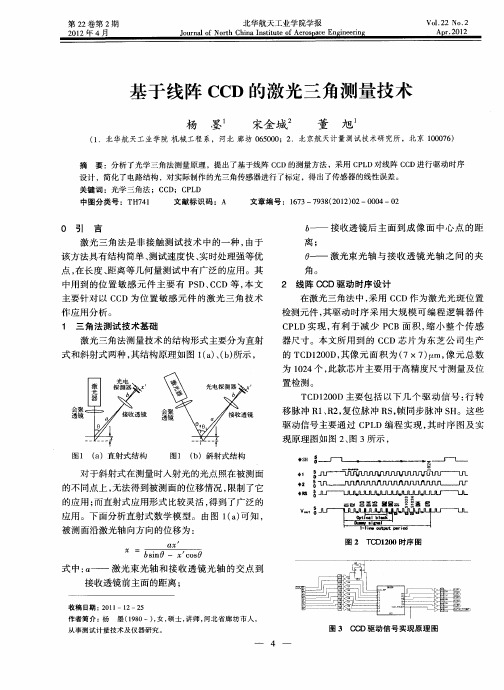
基于线阵CCD的激光三角测量技术
Ab ta t Th s ril to u e h e in a d r aiai n o n E c mme c l t r i u n t r i ,a d p e e t h e l a i n o sr c : i a t ei r d c st ed s n e l t fa — o c n g z o re p af m f r i ect o n u y n r s n st e r ai t f z o d gt i n t r t i i sg a u e wih XML tc n l g a e n t e a ay i n t e a v n a e fXM L a d t e p i cp e o i i lsg a u e Ths l a e h o o y b s d o h n ss o h d a tg s o l n h rn il fd g t i n t r . a i ma e h — o k s t e E c mme c l t r mo es u ea d s c e su . re p a f m r e r n u c sf o c 1
误差 修正 , 用精 密 位 移 平 台作 为标 定 设 备 对 传 感 采
器 的 误 差 进 行 校 准 , 密 位 移 平 台 定 位 精 度 为 0 精 .
0 2 m。利用 校准 数 据对 传 感 器 作 误 差 补偿 , 偿 0r a 补
后 重新校 准 得到新 的校准数 据 见表 1 。
21 0 2年 4月
[]唐琼 , 5 高峰 , 晓雄 . 于 A P+XML的数据 交 换方 法 何 基 S [ ]电脑开发与应用 ,0 6 1 ( ) 1 . J. 2 0 ,9 3 :7
[ ]郭璞 . K 技术及其在城市应 急联动 系统 中的应用研 究 6 P I [ ]计 算机安全 ,0 8 ( )8 —8 . J. 20 ,9 :1 4
ccd测距原理
ccd测距原理
CCD测距原理是通过光电转换器件CCD(Charge-Coupled Device)接收光信号,并将其转换为电信号进行测距的方法。
CCD是一种由大量规则排列的像素组成的芯片,每个像素可
以感受到光的强度。
当光照射到CCD上时,其中的光电二极
管会将光子转换为电荷,并在各个像素位置上储存。
在进行测距时,CCD会接受一个发射出的激光脉冲信号。
当
激光脉冲信号照射到目标物体上,并反射回来时,CCD会接
收到反射光信号,并将其转换为电荷信号。
根据光在空气中的传播速度以及接收到反射光的时间差,可以计算出光的往返时间。
CCD测距原理中的一个关键步骤是确定反射光的时间差。
为
了实现这一点,首先需要通过触发电路控制激光器发射出一个非常短暂的激光脉冲。
然后,CCD会接收到反射光信号,其
中包含来自目标物体的反射光以及其他环境因素的干扰光。
通过控制CCD的工作方式,可以将反射光信号与干扰光信号进
行区分。
将CCD接收到的反射光信号转换为电信号后,可以使用电子
元器件进行信号处理和分析。
通过计算接收到反射光的时间差以及光在空气中的速度,可以得到目标物体与测距设备之间的距离。
CCD测距原理主要适用于近距离的测量,例如在工业自动化、
激光测距仪等领域。
通过利用光电转换原理,CCD可以实现快速、精确的测距,并具有较高的分辨率和灵敏度。
用CCD实现精密的长度测量

一、概 述 目前, 国内外生产的电荷耦合器件 CCD 芯 片, 为了防止相邻象元在转移脉冲驱动下引起 串扰, CCD 芯片象元间距一般为 14 m , 最小也 不小于 7 m。这对 于低、中 精度的 检测、扫 描 来说也许足够了, 但对于高精度的长度测量是 远远不够的。这也是 CCD 不能在长度测量中 ( 特别是高精度长度测量中) 得到广泛应用的主 要原因。 一般将 CCD 应用于长度测量中的精度取 决于 CCD 的象元间距 d 与光学放大倍数 f 的 关系 d / f 。由于 CCD 的测量范围较小, 若要采 用光学放大来提高分辨率, 势必造成测量范围 的减小( 1/ f ) 。由此可 以看出, 若要使分辨 率 达到 1 4 m, 则测量的范围将减小 10 倍。对于 1024 线 阵 CCD 来说, l = 1024 ! 14 m = 14. 336mm , 放大 10 倍后, 其测量范围为 l∀ = 1024 ! 1 4 m = 1 4336mm, 显然这对于大多数测量 来说, 其测量范围是不够的。为解决此矛盾, 本 文提出了不经过光学放大就能将 CCD 的分辨 率由象元间距 14 m 提高到 1 m 甚至更 高的 一种方法。文中还介绍了实现细分的电路, 以 及 CCD 细分的数据采集方法。 二、CCD 象元空间细分的可行性分析 线阵 CCD 的 象 元面 积为 14 m ! 14 m,
基于嫦娥一号CCD相机和激光测距数据的月球三维可视化系统

基于嫦娥一号CCD相机和激光测距数据的月球三维可视化系统I. 引言- 介绍嫦娥一号CCD相机和激光测距数据的重要性和应用价值- 概述本篇论文的研究内容和目的II. 相机和激光测距技术简介- CC相机和激光测距技术的原理和应用- 嫦娥一号CCD相机和激光测距仪器的特点和技术指标III. 数据处理与三维重建算法- 相机和激光测距数据的处理流程和方法- 三维重建算法的原理、分类和优缺点- 基于数据处理和三维重建算法的嫦娥一号月球三维地图构建IV. 月球三维可视化系统的实现- 系统框架和功能设计- 数据库管理和数据分析- 用户交互和场景渲染- 数据可视化和分析功能演示V. 结论和展望- 总结嫦娥一号CCD相机和激光测距技术在月球三维可视化系统中的应用- 分析数据处理和三维重建算法的优化方向和未来发展趋势- 展望嫦娥二号及后续探测任务对月球三维可视化系统的推动作用。
第一章:引言背景和概述自人类探索太空以来,月球一直是人类最热衷于探索的天体之一。
近年来,随着科技的不断发展和探测技术的不断提升,人们对月球的知识和认识也不断增加。
嫦娥一号是亚洲首个登月探测任务,成功发射于2013年12月2日,并在2013年12月14日成功着陆在月球表面。
其携带了众多科学仪器,其中包括有CCD相机和激光测距仪器。
嫦娥一号任务为月球的地质构造、矿产资源、太阳风、月球等离子体环境等诸多领域的研究和探索提供了重要的科学数据。
近年来,随着虚拟现实技术不断发展和普及,人们对于三维可视化的需求也越来越大。
月球的三维地图构建和可视化技术也成为了重要的研究课题。
本文基于嫦娥一号CCD相机和激光测距数据,探讨了利用数据处理和三维重建算法构建月球三维地图,并实现月球三维可视化系统的研究方法和思路。
论文结构本文将从以下几个方面展开阐述:首先,对CCD相机和激光测距技术进行简介,包括原理、应用和仪器特点;其次,介绍数据处理与三维重建算法,包括数据处理流程、三维重建算法的原理和分类以及基于数据处理和三维重建算法的嫦娥一号月球三维地图构建;再次,对月球三维可视化系统进行实现章节的详细描述,包括系统框架和功能设计,数据库管理和数据分析,用户交互和场景渲染,数据可视化和分析功能演示;最后是结论和展望章节,总结利用嫦娥一号CCD相机和激光测距技术在月球三维可视化系统中的应用,分析数据处理和三维重建算法的优化方向和未来发展趋势,展望嫦娥二号及后续探测任务对月球三维可视化系统的推动作用。
电容器铝壳表面缺陷检测的CCD图像处理

电容器铝壳表面缺陷检测的CCD图像处理
田原嫄;潘敏凯;刘思阳
【期刊名称】《组合机床与自动化加工技术》
【年(卷),期】2013(000)005
【摘要】在铝电解电容器铝壳生产过程中,为了确保产品品质,降低消耗,应快速检测铝壳表面发生的质量情况,对异常现象能及时地作出报警、停机或自动分离提供判断依据.首先对采集到的铝壳图像进行灰度处理、中值滤波、二值化和边缘检测等处理,然后通过缺陷特征的提取,确定铝壳样件是否存在表面缺陷,根据检测结果将有缺陷的样件筛选出来.通过对主要缺陷样件的检测结果表明通过机械辅助设备可以实现在1s内同时检测约20个样件,能够满足整体加工流程对快速检测表面缺陷的技术要求.
【总页数】3页(P73-75)
【作者】田原嫄;潘敏凯;刘思阳
【作者单位】东北电力大学机械工程学院,吉林吉林 132012;东北电力大学机械工程学院,吉林吉林 132012;东北电力大学机械工程学院,吉林吉林 132012
【正文语种】中文
【中图分类】TH165;TG65
【相关文献】
1.电容器铝壳自动上料-定量灌胶控制系统设计 [J], 郑天池;孙小刚;郭琳娜;邵建新;邱自学
2.基于机器视觉的电容器铝壳端面缺陷检测 [J], 陈向伟;肖冰;高强
3.铝固体电解电容器电解质研究进展Ⅰ.TCNQ型铝固体电解电容器 [J], 张庆武;周啸;姜翠玲;于家宁
4.铝固体电解电容器电解质研究进展Ⅱ.导电聚合物型铝固体电解电容器 [J], 张庆武;周啸;姜翠玲;于家宁
5.电容器铝壳封口强度检测装置研制 [J], 孙小刚;郭琳娜;郑天池;邱自学
因版权原因,仅展示原文概要,查看原文内容请购买。
基于CCD摄像机恢复空间Z坐标方法的研究
基金资助项目名称:零件尺寸在线测量设备的开发研究颁发部门:吉林省科学技术厅合同编号:20070306 基金负责人:谭庆昌基于CCD 摄像机恢复空间Z 坐标方法的研究张云辉1,谭庆昌1,田原嫄1(1.吉林大学 机械科学与工程学院 130000)摘要:视觉测量是计算机视觉与图像处理领域诸多研究成果应用于测量领域而形成的一类新的测量方法。
二维图像的特征抽取是三维计算机视觉的第一步,通过二维图像恢复出被测量的三维信息这一问题可以理解为两个互逆过程:1.根据摄像机参数及获得的两维图像信息进行三维重建;2.根据三维空间信息及两维图像信息标定摄像机内部和外部参数。
鉴于此,本文从物理光电学及数学角度,采用CCD 激光测距法,推导了基于静态CCD 激光测距的通用公式。
该算法的最大优点是无需进行复杂的迭代计算,大大降低了计算量,且有效的提高了测量精度。
分析表明:该方法计算简单、易于实现、实用价值高。
关键词:三维重建;摄像机标定;电荷耦合器中图分类号:TP274+.2 文献标识符:B11.引言图像上每一点的亮度反映了空间物体表面某点反射光的强度,而该点在图像上的位置则与空间物体相应点的几何位置有关,这些位置的相互关系,由摄像机成像几何模型所决定。
该几何模型的参数成为摄像机参数,这些参数必须由实验与计算来确定,实验与计算的过程称为摄像机标定。
摄像机模型是光学成像几何关系的简化,最简单的模型为线性模型,或称针孔模型(pin-hole model)。
摄像机采集的图像以标准电视信号的形式输入计算机,经计算机中的专用数模转换板变成数字图像,每幅数字图像在计算机内为N M ×数组,M 行N 列的图像中的每一元素(称为象素,pixel)的数值即是图像点的亮度(或称灰度)。
三维深度测量的研究方法尚未纯熟,目前已提出的比较接近国际技术水平的方法有:光学散焦法[1、2、3、4]、激光测距法[5、6]和双目立体视觉法[7、8]。
CCD图像采集研究

基于网络技术的CCD图像采集系统研究时间:2009-04-28 15:27:59 来源:现代电子技术作者:中立琴,马彩文,田新锋,程志远中国科学院摘要:CCD是一种将光信号转变为电信号的器件,适用于精确控制。
在神光原型系统中CCD图像采集系统在使用过程中出现了数据拥塞等问题,改进的CCD采集系统的总体设计采用基于网络架构的思路,用带有千兆以太网的数据接口的网络CCD作为一个智能终端直接与工业以太网连接,并且只有有权限的计算机才可以访问CCD,使得系统成为一个控制简单可靠、智能化的系统。
试验证明采用该设计方法可以提高系统的运行效率和可靠性,解决了网络拥塞的问题。
关键词:CCD;以太网;精确控制;网络技术;FEP电荷耦合器件(Charge Coupled Device,CCD)是由一种高感光度的半导体材料制成,能把光线转变成电荷,通过模/数转换器芯片转换成数字信号,数字信号经过压缩后由相机内部的闪速存储器或内置硬盘卡保存,因而可以轻而易举地把数据传输给计算机,并借助于计算机的处理手段,根据需要和想象来修改图像。
CCD由许多感光单位组成,通常以百万像素为单位。
当CCD表面受到光线照射时,每个感光单位会将电荷反映在组件上,所有的感光单位所产生的信号加在一起,就构成了一幅完整的画面。
CCD实现了非电量的电量测量,同时它还具有体积小、重量轻、噪声低、自扫描、工作速度快、测量精度高、寿命长的特点,因此受到人们的高度重视,在精密测量、非接触无损检测、文件扫描与航空遥感等领域中,发挥着重要作用。
l 系统概述该装置是国家重要研究项目,主要由主控系统、服务子系统、底层控制系统组成,图像采集与传输系统是该装置底层控制系统的一部分,主要实现光束自动准值、图像分析以及对某些重要位置的视频实时监视、自动记录和回放检索。
图像采集与传输系统由步进机构、光学系统、CCD、准值前端处理器、现场控制中心等组成。
该系统中共有3种不同类型的CCD,分别是科学级CCD、准直CCD、大靶面CCD。
CCD图像对比度测试方法研究
在观察距离不同,其他条件相同的情况下,对处于不同地面背景上,上述目标的 可见光探测概率。计算结果见表。
表22不同目标在不同地面背景下可见光探测概率橘黄色汽车褐色涂料钢管背景目标一背景探测概率背景目标一背景探测概率亮度对比度p亮度对比度p绿色植被01325l绿色植被525100少量植被000038少量植被456991805588141509967沙06789430859961沥青公路2oo9906沥青公路1567i00田野1259118野1150100积水泥泞0808957积水泥泞9009958光泽地面o558814光泽地面1509967从上表中可看出在其他影响因子相同的条件下对处于不同地面背景上的不同目标的可见光探测概率昂
橘黄色汽车
褐色涂料钢管
背景目标一背景 探测概率
背景目标一背景 探测概率
亮度对比度p/(%)
,
亮度对比度p/(%)
绿色植被0.13
2.5l
绿色植被5.25
100
少量植被0.00
0.38
少量植被4.56
99.18
湿沙
0.55
88.14
湿沙
1.50
99.67
沙0.67
89.43
沙
0.85
99.61
沥青公路2.oo
contrast of target and background is a basic request of modem war,The article selects CCD
照明系统对图像检测精度影响的研究
照明系统对图像检测精度影响的研究田原嫄;谭庆昌【摘要】光源是影响摄像质量十分关键的因素,采用不同的照明方法和光源分别进行实验.用CCD摄像机拍摄标准块规,然后利用递推平均滤波算法对采集到的图像进行滤波处理,减少噪声对边缘检测的干扰,利用一维灰度矩亚像素算法搜索标准块规上下两边缘,用求平均值法算出每幅图片中标准块规的厚度.实验结果表明,随着光源选择的变化,照明系统对图像检测精度的影响不同,采用背光照明并使用医用观察灯照明误差最小.%Light source is critical for photograph quality. Experiments with different illumination methods and light sources were conducted. Firstly, a photo of normal cube with CCD camera was taken. Secondly, iterative average filter method was used to deal with image collected to reduce interference caused by noise in detecting edge. Thirdly, ID gray moment sub-pixel method was used to detect edge of normal cube. Finally, average algorithm was used to calculate thickness of every normal cube to test the impact of illumination system on image detection accuracy. The test shows that illumination error of apheliotropic light for medical observation is the minimum.【期刊名称】《应用光学》【年(卷),期】2011(032)005【总页数】4页(P922-925)【关键词】照明系统;边缘检测;一维灰度矩亚像素算法;递推平均滤波算法【作者】田原嫄;谭庆昌【作者单位】东北电力大学机械工程学院,吉林吉林132012;吉林大学机械科学与工程学院,吉林长春130025【正文语种】中文【中图分类】TN206;TP391.4引言在目前的机器视觉应用系统中,好的光源与照明[1]方案往往是整个系统成败的关键,起着非常重要的作用。
基于数字图像处理测量直线度的方法研究

基于数字图像处理测量直线度的方法研究
张云辉;谭庆昌;田原嫄;黄月
【期刊名称】《微计算机信息》
【年(卷),期】2008(024)027
【摘要】近年来.数字图像处理与计算机视觉领域中诸多研究成果被用于测量,进而发展成为一类新兴的测量方法--计算机视觉检测技术.本文主要研究基于数字图像处理技术进行非接触测量的方法.针对轴类零件直线度的测量,首先对CCD摄像机采集到的图像进行图像处理,然后利用Canny算子对处理后的图像进行边缘检测,最后运用轴线拟合法测量直线度,该方法具有很好的实时性,可以实现在线式非接触测量.通过实验证明,使用轴线拟合法测量轴类直线度,可以进一步提高测量精度.
【总页数】3页(P274-275,203)
【作者】张云辉;谭庆昌;田原嫄;黄月
【作者单位】130025长春吉林大学南岭校区机械科学与工程学院;130025长春吉林大学南岭校区机械科学与工程学院;130025长春吉林大学南岭校区机械科学与工程学院;130000,长春,长春富奥江森自控饰件系统有限公司
【正文语种】中文
【中图分类】TP274
【相关文献】
1.基于激光对中仪直线度功能测量气缸与十字头滑道同轴度的方法研究 [J], 董云滨
2.基于CMOS的深孔直线度测量方法研究∗ [J], 郝永鹏;于大国;王继明;李少敏
3.基于LabVIEW直线度误差测量数据处理方法研究 [J], 葛为民
4.基于数字图像处理技术的浆液注入率测量方法研究 [J], 郭炎伟;贺少辉;管晓明;刘仰鹏
5.基于影像仪测量直线度误差的优化方法研究 [J], 景敏
因版权原因,仅展示原文概要,查看原文内容请购买。
CD物镜工程化设计中的若干问题
CD物镜工程化设计中的若干问题田静怡;巩马理;闫平;崔瑞桢【摘要】介绍了CD光学系统的工作原理和光学评价准则,讨论了设计和装配中应当注意的主要问题.从工程化的角度设计了一款可用于批量生产的CD物镜,通过对设计实例的计算分析,给出了激光器像散、制造误差、系统误差影响下物镜的光学特性曲线.设计结果不仅可以承受各种制造误差,而且能够在聚焦误差、光盘倾斜等其它误差存在的情况下,于较大寻迹范围内保持良好的光学特性,证明了该设计的实用性.【期刊名称】《激光技术》【年(卷),期】2006(030)001【总页数】4页(P31-33,49)【关键词】光学设计与制造;CD物镜;波像差;公差;光学特性【作者】田静怡;巩马理;闫平;崔瑞桢【作者单位】清华大学,精密仪器与机械学系,光子与电子技术研究中心,北京,100084;清华大学,精密仪器与机械学系,光子与电子技术研究中心,北京,100084;清华大学,精密仪器与机械学系,光子与电子技术研究中心,北京,100084;清华大学,精密仪器与机械学系,光子与电子技术研究中心,北京,100084【正文语种】中文【中图分类】O435.2引言光盘是信息基础设施产品,中国作为光盘产品的生产和消费大国,掌握的核心技术却非常之少。
目前国内光头组装厂商使用的物镜几乎全部依赖国外进口。
日本是我国物镜的主要进口国,他们是实现CD物镜量产化的国家,其DVD物镜的量产技术也早已成熟,柯尼卡、索尼及富士公司至今仍在这一领域处于世界领先地位。
国内在光存储低端产品CD物镜的量产化方面还处于探索阶段,至今未达到光头厂商批量装配的要求。
达到批量生产要求的物镜设计具有相当的难度,设计者一方面需要对物镜的加工环节和光头装配环节有充分的了解,同时还要掌握力矩器以及伺服系统的工作特性。
在设计中既要考虑物镜本身制造误差又要考虑系统误差对物镜特性的影响。
因此,必须在设计过程中合理分配非球面的校正力度,使这些误差对物镜性能的影响最小化。
CCD图像相对测光中的技术研究与精度回报现象
CCD图像相对测光中的技术研究与精度回报现象
郭碧峰;彭青玉;尚一佳;覃永贵;林孚荣
【期刊名称】《天文研究与技术》
【年(卷),期】2022(19)2
【摘要】天体随时间的光度变化能够反映其物理性质,高精度测光技术有助于我们更好地分析与探究天体的光变情况,对天体的演化研究有重要意义。
介绍了相关的测光工具与技术,探索了把MaxIm DL与photutils测光库相结合的测光技术及应用,提出了连续图像中各星像测光数据快速匹配的解决方案。
通过分析中国科学院云南天文台1 m光学望远镜拍摄的M35星团图像发现,相对测光中存在精度回报现象,即相近的两颗星进行相对测光具有更高的测量精度,且该现象的显著程度与大气质量相关。
针对相对测光的精度回报现象,提出了高精度相对测光的参考方法。
【总页数】7页(P111-117)
【作者】郭碧峰;彭青玉;尚一佳;覃永贵;林孚荣
【作者单位】暨南大学计算机科学系;暨南大学中法天体测量、动力学与空间科学联合实验室
【正文语种】中文
【中图分类】P141.2
【相关文献】
1.夜间成像光测数字图像增强技术研究
2.线阵CCD在高精度测径系统中的应用
3.BL Lac天体ON231的CCD测光积分时间与测光误差分析
4.用CCD作恒星测
光的精度和误差分析——CCD天文测量方法(Ⅰ)D平场改正精度对CCD测光精度的影响
因版权原因,仅展示原文概要,查看原文内容请购买。
基于CCD的光学测角精度检测方法
基于CCD的光学测角精度检测方法
张博;段锦;景文博
【期刊名称】《长春理工大学学报(自然科学版)》
【年(卷),期】2010(033)004
【摘要】测角精度是光电系统中一项重要的技术指标,通常是以校准塔和方位标为基准进行误差标定.本文阐述了一种基于CCD成像的检测光学系统测角精度的方法.利用经纬仪电十字的图像处理结果与经纬仪的测角真值作比较,验证光学系统的测角精度,采用投影法和二项式曲线拟合相结合的算法,使定位精度达到亚像素级.试验结果表明该方法具有标校过程简单、快速,标校精度高等优点.其标定误差小于1".【总页数】3页(P55-57)
【作者】张博;段锦;景文博
【作者单位】长春理工大学,电子信息工程学院,长春,130022;长春理工大学,电子信息工程学院,长春,130022;长春理工大学,电子信息工程学院,长春,130022
【正文语种】中文
【中图分类】TP391.41
【相关文献】
D靶面与安装定位面夹角误差的光学检测方法 [J], 王志
2.空间CCD相机测角精度测量方法研究 [J], 许维星;乔卫东;杨建峰;薛彬;任焕焕
3.基于经纬仪的感应同步器测角精度检测方法研究 [J], 尚超;王淦泉;陈桂林
4.一种基于图像的光学系统测角精度检测方法 [J], 王凤娇;景文博;刘学;王晓曼;韩
学辉
5.基于多CCD拼接相机测角精度检测 [J], 王喜军;王军;杨会玲;何昕;魏仲慧
因版权原因,仅展示原文概要,查看原文内容请购买。
CCD摄像机镜头薄棱镜畸变的研究
CCD摄像机镜头薄棱镜畸变的研究
田原嫄;杨浩;刘思阳
【期刊名称】《东北电力大学学报》
【年(卷),期】2010(030)006
【摘要】本文以CCD摄像机小孔成像模型为基础建立了薄棱镜畸变的非线性几何畸变模型,通过对影响畸变参数测量精度的各种因素的分析,使用最小二乘法解线性方程组得到摄像机系统畸变模型的畸变系数.通过与径向畸变相对比得出薄棱镜畸变对摄像机标定的影响相对较小,在此基础上提出了提高标定精度的有效方案.【总页数】5页(P64-68)
【作者】田原嫄;杨浩;刘思阳
【作者单位】东北电力大学,机械工程学院,吉林吉林,132012;东北电力大学,机械工程学院,吉林吉林,132012;东北电力大学,机械工程学院,吉林吉林,132012
【正文语种】中文
【中图分类】TP274
【相关文献】
1.大视场短焦距CCD成像系统畸变校正研究 [J], 张华达
2.摄像机镜头畸变的研究 [J], 田原嫄;黄合成;谭庆昌;张海波;石志标
3.基于CCD的V棱镜光电折射仪研究 [J], 张溪;曹维国;回英超;马越
4.基于标定的CCD图像畸变校正方法研究 [J], 徐芳;刘晶红;王宣
5.多CCD拼接相机系统中畸变误差研究 [J], 何昕;王军;杨会玲;鲍海明;郝志航
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
中 文 核 心 期 刊 《 微 计 算 机 信 息 》( 测 控 自 动 化 )2007 年 第 23 卷 第 11-1 期
基于静态图像的 CCD 激光测距方法的研究
S tu d y o f CCD la s e r ra n g e fin d in g b a s e d o n s ta tic im a g e
dx、dy 是成像平面象素和空间物理长度单位之间的转换因
子, 是图像坐标系转换为像素坐标系的基准, 不易直接求得, 可
以利用对已知实际长度的线段拍摄, 然后测出图像中此线段端
创
新
作者创新点:本文在考虑光轴与像平面的交点(x0,y0)时, 认为 该交点在像平面坐标系中的位置是任意的, 不仅限于在像平面 坐标系的原点处。这样的考虑不但更具普遍意义, 而且算法更 加直接明了、简单透彻, 使测量精度和速度都得到了提高。
标定结果为
技
术
所以
Z0 取 值 的 正 负 影 响 参 数 γij、k1、k2、x0 的 符 号 。 Z0 值 的 取 正 或取负反映了世界坐标系坐标轴的指向。所以 , 一般如无特殊
要 求 , 可 将 Z0 值 取 正 号 。 如 果 世 界 坐 标 系 坐 标 轴 已 经 确 定 , 则 可由摄像机在世界坐标系中 的位置来确定。为此, 可想象将世
表达式, 可求
。
将
代入 A11 表达式, 可求 γ11。
将
代入 A12 表达式, 可求 γ12。
将
代入 A13 表达式, 可求 γ13。
以上参数都求得结束后, 根据表达式④可求得 υ0 值。 接下来, 求 x0、y0
利用求出的 利用求出的 最后, 求解 dy 过程。
代入 A14 表达式, 可求 x0 代入 A24 表达式, 可求 y0
(下转第 308 页)
《P LC 技术应用 200 例》
邮局订阅号: 82-946 360 元 / 年 - 97-
(吉林大学南岭校区)田 原 嫄 谭 庆 昌
TIAN YUANYUAN TAN QINGCHANG
摘要:随 着 测 量 技 术 的 迅 猛 发 展 , 现 今 对 三 维 深 度 的 测 量 常 用 激 光 测 距 法 。然 而 , 固 定 摄 像 机 电 荷 耦 合 型 CCD 器 件 是 一 种 集 成 电 路 , 通 过 CCD 可 以 实 现 光 电 转 换 信 号 储 存 、转 移 ( 传 输 ) 、输 出 、处 理 以 及 电 子 快 门 等 一 系 列 功 能 , CCD 数 据 率 可 调 。 因 此 , CCD 可 适 用 于 动 态 、静 态 等 各 种 条 件 下 的 尺 寸 测 量 。 鉴 于 此 , 本 文 从 物 理 光 电 学 及 数 学 角 度 , 采 用 CCD 激 光 测 距 法 , 推 导 了 基 于 静 态 图 像 的 CCD 激 光 测 距 的 通 用 公 式 。 该 算 法 的 最 大 优 点 是 无 需 进 行 复 杂 的 迭 代 计 算 , 大 大 降 低 了 计 算 量 , 且 有 效 的 提 高 了 测 量 精 度 。 分 析 表 明 :该 方 法 计 算 简 单 、易 于 实 现 、实 用 价 值 高 。 关键词:三维深度;激光测距;CCD 中图分类号:TN24 文献标识码:A
进此类产品。因此, 对于三维深度测量核心技术在我国的研究
是非常必要的。
三维深度测量的研究方法尚未纯熟, 目前已提出的比较接
近 国 际 技 术 水 平 的 方 法 有 :光 学 散 焦 法 、激 光 测 距 法 和 双 目 立 体
视觉法。本文提出的基于静态图像的 CCD 激光测距法是基于结
合激光和 CCD 的优势考虑的。激光具有方向性强、单色性好、高
- 96- 360元 / 年 邮局订阅号: 82-946
《现场总线技术应用 200 例》
您的论文得到两院院士关注
传感器与仪帧存坐标代入上式, 可得 一个线性方程组,
点间的像素间距。 在确定像机的焦距 f, 分辨率和物距 vd 的条件下, 对 标 准 图
像进行拍摄, 拍摄尽量将像机光轴垂直通过标准图像的中心 O, 为了排除图像非线性畸变的影响, 尽量靠近图像中心取点。最 后, 对 dxi 和 dyi 分别求算术平均值, 就可获得 dy。
4 实验结果及结论
实 验 室 采 用 的 面 阵 CCD 是 JAI CV- M4 +CL,CCD 电 源 是 12V,1A and Cable, 定 焦 镜 头 Computar M0814- MP,图 像 采 集 卡 X64- CLiProTM 等设备, 标定板是用激光打印机打印在一张纸上 的 5x5mm 标准网格。在白天室内日光灯下做的实验, 根据实验, 验证了世界坐标系到计算机帧存坐标系的转换矩阵 A 具有较 高精度的拟合度, 同时标定出实验所用摄像机的内外部参数。
术 iterative calculation. It can greatly reduce calculation and improve measure precision effectively. The analysis shows that the method is easy to calculate and realize. It is valuable.
界 坐 标 系 O- XYZ 旋 转 到 与 摄 像 机 坐 标 系 平 行 。 所 以 , 如 果 摄
像 机 相 对 世 界 坐 标 系 的 位 置 沿 Z0 轴 方 向 离 开 , 则 Z0 为 正 , 反
之 Z0 应 取 负 值 。
下面欲求
需进一步求
。
由表达式⑥可知
因此有
注意:k1 取正号。
将 z0 代入
根据点 p 与镜头中心的水平距离 d 的几何关系计算公式为: ①
设 θ(u0,v0)是 摄 像 机 光 轴 与 像 平 面 交 点(x0,y0)夹 角 的 帧 存 坐 标, 设帧存中的一个像素对应于像平面在 X 轴与 Y 轴方向上的 物理尺寸分别 为 dx,dy。 ( u,v) 像 平 面 上 任 意 一 点 对 应 的 帧 存 坐 标, 则有
⑥ 用最小二乘法可以求 Aij, A 表示世界坐标系 到 计 算 机 帧 存 坐标系的转换矩阵。
其中, 矩阵
表示世界坐标系到摄像机坐标系
的旋转矩阵。f 表示有效焦距。 由于
表达式中, (ui,vj)表示标准线段的其中一个端点像素坐标值, (ui' ,vj' ) 表示 标 准 线 段 上 任 意 一 点 像 素 坐 标 值 , lij' 表 示(uj,vj) 与(uj' ,vj' )两像素坐标间实际测量值, vd 表示像机物距。
亮度、良好的相干性 , 可 以 进 行 空 间 测 距 , 用 于 精 密 的 长 度 测 量
和各种计量工作。CCD 器件是一种固体化器件, 具有体积小、重 量轻、电压及功耗低、可 靠 性 高 、寿 命 长 等 一 系 列 优 点 。 具 有 理 想 的 “扫 描 ”线 性 , 可 进 行 行 向 寻 址 , 可 变 换 “扫 描 ”速 度 , 畸 变
项目经济效益: 该研究对于在煤矿中的推广有广阔的应用 前景, 每年可节 省 约 15 万 元 维 修 经 费 。 数 据 来 源 淮 南 矿 业 ( 集 团) 有限责任公司潘集第三煤矿, 系统采用的研究方法是基于 FPGA 激光测距系统中基 4 算法。 参考文献 [1]陈朝阳,张桂林.利用成像系统的光学散焦获取景物的深度信 息[J].华中理工大学学报.1997, 25- 12:8- 10 [2]田涛,潘俊民.基于矩保持法的散焦图像深度估计[J].上海交通 大学学报.2000, 34- 7:917- 920 [3]张淑芳,李华.基于一幅散焦图像的深度估计新算法[J].光电 子·激光.2006, 17 - 3:364- 367 [4]田涛,潘俊民.基于散焦图像深度测量的一种新方法[J].机器 人.2001, 23- 1:15- 19 [5]张志勇等.一种快速、高精度激光相位测距方法的研究[J].仪器 仪表学报.2005, 26 - 8:16- 17 [6]张坤宜等.光电测距[M].中南工业大学出版社.1991:42- 56 [7]管业鹏,童林夙.双目立体视觉测量方法的研究[J]. 仪器仪表 学报.2003, 24- 6:581- 584 [8] 刘艳玉等.ADS7852 在双目测距中的应用. 微计算机信息[J]. 2006, 4- 2:200- 202 [9]陈利红,毛剑飞,诸静.CCD 摄像机标定与修正的简便方法[J]. 浙江大学学报(工学版).2003, 37- 4:406- 409
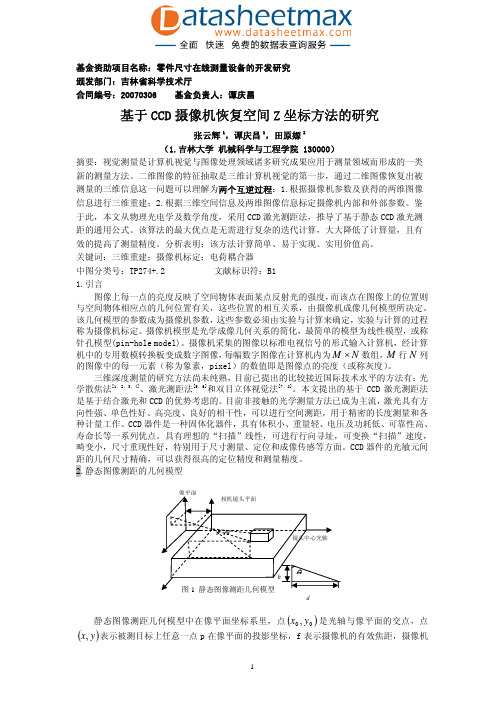
图 1 静态图像测距几何模
3 基于静态图像 CCD 激光测距算法
小 , 尺 寸 重 现 性 好 , 特 别 用 于 尺 寸 测 量 、定 位 和 成 像 传 感 等 方 面。CCD 器件的光敏元间距的几何尺寸精确 , 可 以 获 得 很 高 的 定位精度和测量精度, 比如东芝的 2048 位 CCD 的光敏元间距 可 达 14μm, 5000 位 CCD 可 达 7μm。CCD 数 据 率 可 调 , 因 此 可 适 用 于 动 态 、静 态 等 各 种 条 件 下 的 测 量 , 而 且 还 可 以 利 用 电 子 快门面阵 CCD 系统实现高速瞬态的记录。
现了突破性的进展。1974 年 12 月 JCY- 2 型激光测距仪研制成 表示被测目标上一点 p 与镜头中心的水平距离。
功, 该仪器与当 时 国 外 显 有 威 望 的 AGA- 8 型 激 光 测 距 仪 相 媲
美。但是, 近年来我国对三维深度测量技术的发展还是较国外
对此方面的研究及应用稍缓一步, 致使我国要以高价从国外引
2 静态图像测距的几何模型
静态图像测距几何模型中在像平面坐标系里 , 点(x0,y0)是 光 轴 与 像 平 面 的 交 点 , 点(x,y)表 示 被 测 目 标 上 任 意 一 点 p 在 像 平