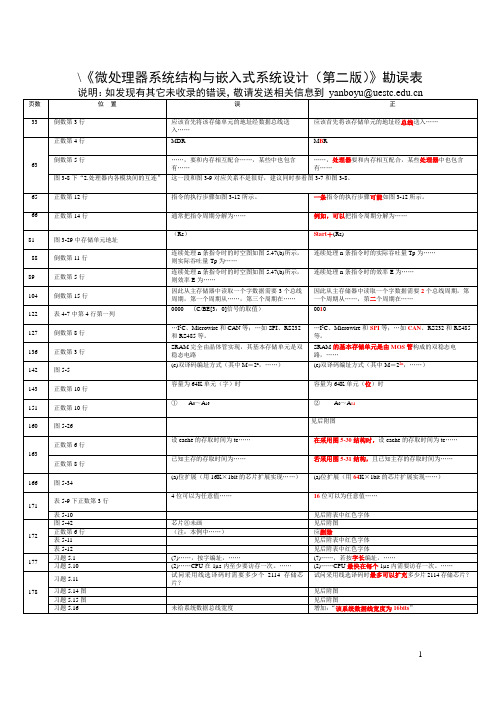
《微机测控系统原理与设计》第1次印刷勘误表
人民交通出版社勘误表-发输变电-20140720

(9000 8000 10000) 22500kVA 2 60%
一、二级负荷: S2 9000 8000 17000kVA 取以上结果的较大值,主变压器容量至少为 22500kVA,因此选 27000kVA。 注:原题考查旧规,新规《35kV~110kV 变电站设计规范》(GB 50059-2011) 中已无 60%的要求。 7. P294,第 2 题答案修正为 B,依据修正如下: 《电力工程电气设计手册》(电力一次部分) P120 表 4-1 和 4-2、式 4-10 及 P129 式 4-20 由于时间仓促,编纂中存在错误与瑕疵,勘误将及时更新,对由此带来的不便,我社表示诚挚的歉意
3 U 3 3.1757 500 1323cm 4 Ke 4 0.9
复合绝缘子要求的最小爬电距离: L2 2.8 500 1400cm ,取两者之较大者,为 1400mm。
由于时间仓促,编纂中存在错误与瑕疵,勘误将及时更新,对由此带来的不便,我社表示诚挚的歉意
2014 年注册电气工程师(发输变电)执业资格考试专业考试历年真题详解
Tpy1 4 92.85 425.24 25% 39484 N
注:《电力工程高压送电线路设计手册》(第二版) P328 表 6-2-6 下方文字“两分裂以上导线的纵向不平衡 张力,对平地、丘陵及山地线路,应分别取不小于一相导线最大使用张力的 15%、20%及 25%,且均不小 于 20kN。 14. P383,第 34 题答案修正为 A,解析修正如下: 《110kV~750kV 架空输电线路设计规范》(GB 50545-2010) 第 10.1.7 条表 10.1.7 山区的 0˚耐张塔塔导线断线张力为最大使用张力的 70%,根据题干已知条件,则:
微机测试系统课件

典型的功能归结为以下几个方面: 选择功能——量程选择、信号通道选择、通道扫描方式选择、采样频率选择等。 信号分析与处理——FFT、相关分析、统计分析、平滑滤波。 波形显示——实时显示多个被测信号的时域波形,即具有存储示波器功能。 自诊断——系统越复杂,自身故障的诊断越显得重要。目前计算机都具有自诊断能力,一般可诊断到插件板一级。一些通用性较强的测试系统,可以诊断到关键部位。自校准一—高精度的自动测试系统都配有标准信号源。测试时,对标准信号和被测信号
2.2.4.2 YM12864X图形点阵液晶显示器 1. 是一种图形点阵液晶显示器 2. 特性 3. 管脚介绍 4. 原理简图 5. 软件说明 6. 写显示数据
2.3 A/D转换器与微机接口设计
2.3.1 8位A/D转换器与微机接口设计 2.3.1.1 ADC0809管脚
1.1.3 现代测试系统的基本结构 1. 非电量的特征 1)从时域特性来看,非电信号有模拟信号和离散信号之别。 2)从频域特性来看,国防试验和机械工艺中信号的频率有高有低,但大多数属低频范围,有的近于直流量。 3)非电信号并非独立存在,它们都处于环境的干扰和噪音的包围之中。 4)非电信号能量强弱悬殊,其中强信号的测试指标容易达到,而弱信号的测试较之要难得多。 5) 理论和实践证明,大多数非电信号通过一定形式的变换,可变成相应的电量。
图2.18 ADC0809的管脚图
2.3.1.2 ADC0809转换器与微机接口硬件电路设计 ADC0809带有三态锁存器,可以与8031单片机的总线直接连接。图2.20给出了ADC0809的接口电路。从图2.20和结合图2.19的时序图可以看出,当P2.3和信号均为低电平时,使启动脉冲START及地址锁存允许脉冲ALE信号有效,将地址送到地址总线,模拟量经C、B、A选择开关所指定的通道送到A/D转换器。在START下降沿的作用下,一位一位的逼近,此时,转换结束信号EOC变低电平。由于逐次逼近需要一定的过程,所以在此期间,模拟量输入不变,比较器也一直在工作,直到转换结束,发出一个转换结束信号EOC(高电平有效)经反向器后可向CPU申请中断,使P3.3=0,表示已结束。此时,单片机发出一个输出允许信号,即P2.3与均为低电平,使OE高电平有效,允许从A/D转换器锁存器读取数字量.
测控电路课后习题答案

第一章绪论1-1测控电路在整个测控系统中起着什么样的作用?传感器的输出信号一般很微弱,还可能伴随着各种噪声,需要用测控电路将它放大,剔除噪声、选取有用信号,按照测量与控制功能的要求,进行所需演算、处理与变换,输出能控制执行机构动作的信号。
在整个测控系统中,电路是最灵活的部分,它具有便于放大、便于转换、便于传输、便于适应各种使用要求的特点。
测控电路在整个测控系统中起着十分关键的作用,测控系统、乃至整个机器和生产系统的性能在很大程度是取决于测控电路。
1-2影响测控电路精度的主要因素有哪些,而其中哪几个因素又是最基本的,需要特别注意?影响测控电路精度的主要因素有:(1)噪声与干扰;(2)失调与漂移,主要是温漂;(3)线性度与保真度;(4)输入与输出阻抗的影响。
其中噪声与干扰,失调与漂移(含温漂)是最主要的,需要特别注意。
1-3为什么说测控电路是测控系统中最灵活的环节,它体现在哪些方面?为了适应在各种情况下测量与控制的需要,要求测控系统具有选取所需的信号、灵活地进行各种变换和对信号进行各种处理与运算的能力,这些工作通常由测控电路完成。
它包括:(1)模数转换与数模转换;(2)直流与交流、电压与电流信号之间的转换。
幅值、相位、频率与脉宽信号等之间的转换;(3)量程的变换;(4)选取所需的信号的能力,信号与噪声的分离,不同频率信号的分离等;(5)对信号进行处理与运算,如求平均值、差值、峰值、绝对值,求导数、积分等、非线性环节的线性化处理、逻辑判断等。
1-4测量电路的输入信号类型对其电路组成有何影响?试述模拟式测量电路与增量码数字式测量电路的基本组成及各组成部分的作用。
随着传感器类型的不同,输入信号的类型也随之而异。
主要可分为模拟式信号与数字式信号。
随着输入信号的不同,测量电路的组成也不同。
图X1-1是模拟式测量电路的基本组成。
传感器包括它的基本转换电路,如电桥,传感器的输出已是电量(电压或电流)。
根据被测量的不同,可进行相应的量程切换。
测控系统原理与设计重点题型

1、微机化测控系统分拿几类?微机化检测系统、微机化控制系统、微机化测控系统 2、模拟量输入通道由那几部分组成?以及各部分的作用? 传感器:将非电量转换为电量 调理电路:放大、滤波采集电路:将模拟信号转换为数字信号 3、模拟量输出通道由哪几部分组成?输出数据寄存器、D/A 转换器、调理电路(模拟显示器、模拟记录器、模拟执行机构) 4、前置放大器:判断信号大小准则?所放位置前后的判断?放大倍数如何确定? 判断信号大小准则输出噪声: 电路在没有信号输入时,输出端输出一定幅度的波动电压.等效输入噪声: 把电路输出端测得的噪声有效值VON 折算到该电路的输入端KV V ON IN=判断依据:是否被淹没?如果加在某电路输入端的信号幅度小到比该电路的等效输入噪声还要低.IS V <KV V ON IN =前置放大器的作用:总输出噪声:2200')()(K V K K V V IN IN ON+=总的等效增效输入噪声:2020'')(K V V K K V V IN IN ON IN+==为使:IN INV V <'须满足以下条件:20011K V V IN IN -<位置上,在滤波器的前面 OR 后面在测控领域,被测信号的频率通常比较低,滤波器大多采用RC 有源滤波器。
由于电阻元件是电路噪声的主要根源,因此RC 滤波器产生的电路噪声比较大。
如果把放大器放在滤波器后面,滤波器的噪声将会被放大器放大,使电路输出信噪比降低.21202021')()(IN IN IN IN IN V V KK V K V V +=+=滤波器1、隔直电容的作用――使调理电路的零漂电压不会随被测信号一起送到采集电路。
2、高通滤波器――滤除低频干扰3、陷波器――抑制交流电干扰。
4、低通滤波器――滤除高频干扰,“去混淆”5、采集电路的四种方案?PGA S\H的作用?采集电路的设计(实现模拟信号到数字信号的电路、AD芯片的选择是核心)测模拟信号恒定或变化缓慢的场合被测模拟信号随时间变化的场合6、前置与主放大器的区别以及适用情况?主放大器为了避免弱信号采样电压在A/D转换时达不到要求的转换精度,将MUX输出的子样电压放大到接近A/D满量程,使数字转换精度提高K倍。
电子科技大学微机系统原理与接口第二版课后习题答案chapter10习题解答
“微处理器系统原理与嵌入式系统设计”第十章习题解答10.2 简述以ARM微处理器为核心的最小硬件系统的组成?●ARM微处理器;●电源模块,包括CPU内核和I/O接口电源;●时钟模块,包括系统主时钟和实时时钟;●复位模块,包括系统加电复位、手动复位和内部复位;●存储器模块,包括程序保存存储器和程序运行存储器;●JTAG调试接口模块。
10.4 简述S3C2440A芯片中各模块时钟信号产生及配置的原理。
为降低系统功耗,可时钟信号进行哪些处理?系统复位信号与各时钟信号有什么关系?当系统主时钟送入S3C2440A芯片后,进入其时钟发生模块,由锁相环进行相应的处理,最终得到FCLK,HCLK,PCLK和UCLK四组时钟信号。
其中,FCLK信号主要供给ARM920T内核使用,HCLK主要供给AHB总线、存储器控制器、中断控制器、LCD控制器、DMA控制器和USB主机模块;PCLK主要供给访问APB总线的外设,例如WDT,I2S,I2C,PWM定时器,MMC接口,ADC,UART,GPIO,RTC和SPI模块;UCLK主要提供USB模块需要的48MHz 时钟。
为降低系统功耗,可对时钟信号进行门控管理。
最低功耗情况下,只开启FCLK信号,其他时钟信号关闭;若需对其他外设,只需使能相应总线及外设的时钟信号有效即可。
系统复位信号一般包括加电复位、手动复位和内部复位三类。
其中,加电复位和手动复位信号均来自外部复位电路,内部复位信号一般来自系统内部事务处理(例如看门狗复位等)。
因此,系统对外部复位信号波形有一定的要求,若不能满足要求系统将不能正常工作。
在S3C2440A芯片中,要完成正确的系统复位,在处理电源保持稳定之后,该信号必须至少维持4个FCLK时钟的低电平状态。
10.6 利用S3C2440A的GPIO端口,设计包含8个LED的流水灯电路,每个LED 间隔1S轮流点亮,试画出程序流程图并写出相关程序段。
假设利用S3C2440A芯片的GPIO端口G的第0~7引脚驱动8个LED电路,对应GPIO输出为0时LED灯亮,则相应程序流程图及相应程序段如下所示:GPGCON EQU 0x56000060GPGDAT EQU 0x56000064GPGUP EQU 0x56000068;配置GPGCON寄存器,设置相关引脚为输出功能LDR R0,=GPGCONLDR R1,[R0]BIC R1,R1,#0x0000FFFFORR R1,R1,#0x00005555STR R1,[R0];配置GPGUP寄存器,断开各上拉电阻LDR R0,=GPGUPLDR R1,[R0]ORR R1,R1,#0x00FFSTR R1,[R0];输出驱动数据,点亮对应LED等LDR R2,=GPGDATLDR R3,[R2]BIC R3,R3,#0x00FFORR R3,R3,#0x00FESTR R3,[R2]LDR R0,=0xFFFFFF ;初始计数值BL DELAY ;调用延迟子程序…LDR R2,=GPGDATLDR R3,[R2]BIC R3,R3,#0x00FFORR R3,R3,#0x007FSTR R3,[R2]LDR R0,=0xFFFFFF ;初始计数值BL DELAY ;调用延迟子程序B LOOPSTARDELAYSUB R0,R0,#1CMP R0,#0x0BNE DELAYMOV PC,LR10.7 在上题中,如果要加入一个按键,实现按键按下时流水灯停止流动,按键放开时流水灯正常流转的功能,思考应怎样修改电路和程序?在上题的基础上,添加一个GPIO口作为输入管脚(GPA的GPA[0]),按键按下GPA[0]值为1,否则为零。
第一次印刷勘误情况
《数字电子技术基础》(2009年6月第1次印刷)勘误情况第一章P6 例1.1解得的结果由“(13.665)10”改为“(13.875)10”。
P8 表1.3中余3码的一列有误,由上而下应为0011、0100、0101、0110、0111、1000、1001、1010、1011、1100。
P13 第6行“与”改为“或”。
倒数第5行中“CD AB A +=”改为“CD AB L +=”。
P14 图1.7(d)、(e)两图中表示非的“。
”去掉。
P23 最后一句“首先找出只有一个合并方向的最小项,他们是2m 和8m ”去掉。
P25 图1.18(b)中两个1的圈应改为两个1和最后一列两个φ的大圈,即两个方格的圈改为四个方格的圈。
P38 自测题1.1第5小题式子中“=F ”去掉,第5小题式子后的“+”去掉。
P39 图P1.2(b)最前面的两个与非门改为非门,即改为P39 习题1.3中“B A B A +=”改为“+=”。
第二章P42 图2.4中上图应将高低电平互换,即改为P51 第10行中的式子V 6.3IL I ==U u 改为I IH 3.6 V u U ==。
P63 图2.39(b)左图中EN 改为EN ,右图EN 方框处加“。
”,即。
P75第10行中“G S (th)N I 0U u <<”改为“0<I u <DD GS(th)N V U -”。
第三章P86 下面各式子中误将大非号印成小非号,应改为 121312311111P AB P P BP S P P AP BP AAB BAB C PP P ========P88 图3.6中与非门改为与门,即改为P90倒数第7行中式子S S I I I I I I I I Y EX ⋅=76543210少一个非号,应改为。
P92 第5行中05=I 改为05=I ,第8行中012=I 改为012=I ;第4段最后一句“低位片的S 作为总的使能输入端,高位片的S Y 作为总的使能输出端”中的“低”、“高”二字互换。
测控系统习题解答
第一章绪论1.为什么说仪器技术是信息的源头技术?仪器是一种信息的工具,起着不可或缺的信息源的作用。
仪器是信息时代的信息获取→处理→传输的链条中的源头技术。
如果没有仪器,就不能获取生产、科学、环境、社会等领域中全方位的信息,进入信息时代将是不可能的。
钱学森院士对新技术革命的论述中说:“新技术革命的关键技术是信息技术”。
信息技术由测量技术、计算机技术、通讯技术三部分组成。
测量技术则是关键和基础。
现在提到信息技术通常想到的只是计算机技术和通讯技术,而关键的基础性的测量技术却往往被人们忽视了。
从上所述可以看出仪器技术是信息的源头技术。
仪器工业是信息工业的重要组成部分。
2.为什么现代测控系统一般都要微机化?随着计算机技术的迅速发展,使得传统的测控系统发生了根本性变革,即采用微型计算机作为测控系统的主体和核心,代替传统测控系统的常规电子线路,从而成为新一代的微机化测控系统。
将微型计算机技术引入测控系统中,不仅可以解决传统测控系统不能解决的问题,而且还能简化电路、增加或增强功能、提高测控精度和可靠性,显著增强测控系统的自动化、智能化程度,而且可以缩短系统研制周期、降低成本,易于升级换代等。
因此,现代测控系统设计,特别是高精度、高性能、多功能的测控系统,目前已很少有不采用计算机技术的了。
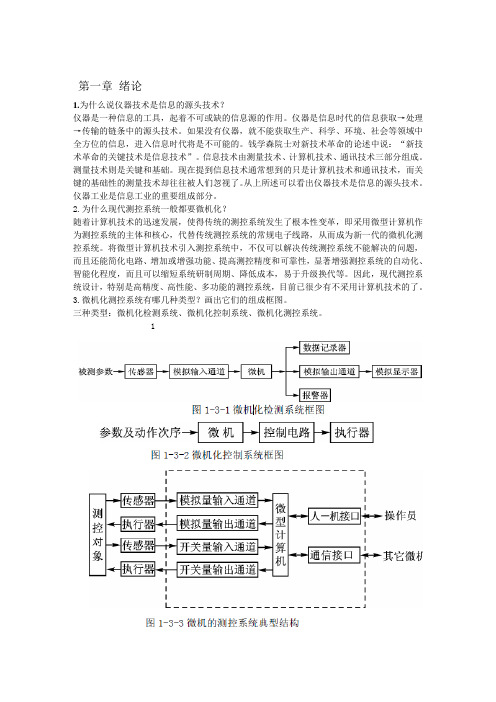
3.微机化测控系统有哪几种类型?画出它们的组成框图。
三种类型:微机化检测系统、微机化控制系统、微机化测控系统。
1第2章 习题解答1、模拟输入通道有哪几种类型?各有何特点?答:按照系统中数据采集电路是各路共用一个还是每路各用一个,多路模拟输入通道可分为集中采集式(简称集中式)和分散采集式(简称分布式)两大类型。
集中式的特点是多路信号共同使用一个S/H 和A/D 电路,模拟多路切换器MUX 对多路信号分时切换、轮流选通到S/H 和A/D 进行数据采集。
分布式的特点是每一路信号都有一个S/H 和A/D ,因而也不再需要模拟多路切换器MUX 。
《测控仪器设计(第)》课后习题答案浦昭邦王宝光
封面作者:Pan Hongliang仅供个人学习测控仪器则是利用测量和控制的理论,采用机、电、光各种计量测试原理及控制系统与计算机相结合的一种范围广泛的测量仪器。
仪器仪表的用途和重要性—遍及国民经济各个部门,深入到人民生活的各个角落,仪器仪表中的计量测试仪器与控制仪器统称为测控仪器,可以说测控仪器的水平是科学技术现代化的重要标志。
仪器仪表的用途:在机械制造业中:对产品的静态与动态性能测试;加工过程的控制与监测;设备运行中的故障诊断等。
在电力、化工、石油工业中:对压力、流量、温度、成分、尺寸等参数的检测和控制;对压力容器泄漏和裂纹的检测等。
在航天、航空工业中:对发动机转速、转矩、振动、噪声、动力特性、喷油压力、管道流量的测量;对构件的应力、刚度、强度的测量;对控制系统的电流、电压、绝缘强度的测量等。
发展趋势:高精度与高可靠性、高效率、智能化、多样化与多维化(1)高精度与高可靠性随着科学技术的发展,对测控仪器的精度提出更高的要求,如几何量nm精度测量,力学量的mg精度测量等。
同时对仪器的可靠性要求也日益增高,尤其是航空、航天用的测控仪器,其可靠性尤为重要。
(2)高效率大批量产品生产节奏,要求测量仪器具有高效率,因此非接触测量、在线检测、自适应控制、模糊控制、操作与控制的自动化、多点检测、机光电算一体化是必然的趋势。
(3)高智能化在信息拾取与转换、信息测量、判断和处理及控制方面大量采用微处理器和微计算机,显示与控制系统向三维形象化发展,操作向自动化发展,并且具有多种人工智能从学习机向人工智能机发展是必然的趋势。
(4)多维化、多功能化(5)开发新原理(6)动态测量现代设计方法的特点:(1)程式性强调设计、生产与销售的一体化。
(2)创造性突出人的创造性,开发创新性产品。
(3)系统性用系统工程思想处理技术系统问题。
力求系统整体最优,同时要考虑人-机-环境的大系统关系。
(4)优化性通过优化理论及技术,以获得功能全、性能良好、成本低、性能价格比高的产品。
勘误表_单片机与微机原理及应用(第2版)[2页]
![勘误表_单片机与微机原理及应用(第2版)[2页]](https://img.taocdn.com/s3/m/5fbdfdfdb8f3f90f76c66137ee06eff9aef849b4.png)
16
不包括位操作类的4条转移指令
不包括位操作类的5条转移指令
109
倒5
很重要,
最重要,
127
17
扩展的内容包括:数据类型、存储类型、存储模式、指针及函数等。
扩展的内容包括:数据类型、存储类型、存储模式、中断服务函数等。
172
倒13
设置读入字节数的奇偶数校验位
设置读入字节奇偶标志
173
倒10
…奇偶数校验位
单片机与微机原理及应用(第2版)勘误表
页码
行
错误内容
更正
3
5
均源于图灵计算机和
均源于图灵计算机思想和
3
12
在此之后,
在此基础上,
12
19
(3)一些…(3)其他系统软。包括一些…45问题6
?典型的I/O接口电路包括哪几种?
?为什么需要有I/O接口电路?
45
问题10
试说明并行接口与串行接口在数据传输与结构上的主要区别?
296
14
与ADD指令相同
与加法指令相同
296
19
与ADC指令相同
与加法指令相同
296
倒3
与ADD指令相同
与加法指令相同
298
19
5.BCD码调整指令
5.十进制数调整指令
298
20
BCD码调整指令共有6条,用于对BCD码运算结果进行调整,
该类指令共有6条,用于对BCD码运算结果进行十进制调整,
300
试说明并行通信与串行通信在数据传输上的主要区别?
66
4
(1)CY(PSW.1):进位标志。
(1)CY(PSW.7):进位标志。
微机原理教材勘误(电子科大版)
\《微处理器系统结构与嵌入式系统设计(第二版)》勘误表160页图5-26 逻辑地址到物理地址的转换A A A A A A178页习题5.14图178页习题5.15图185页图6-7 固定式多端口地址译码电路195页图6-23 DMAC的结构框图213页图6-47 波特率发生器262页图8-17 LDMDB使用示例303页【例9.9】int main(void){const char *a="Hello World!";char b[20];asm{MOV R0, a //;把数组a的首地址赋值给R0MOV R1, b //;把数组b的首地址赋值给R1BL my_strcpy, {R0, R1}}303页【例9.10】#include <stdio.h>int add(int i, int j){int res; /*定义中间变量res*/__asm{ADD res, i, j //;实现res=i+j}return res;}void main( ){int a;a = add(2,3);printf("addition result is : %d\n",a);}332页示例程序TLOOP LDR R2, =UTRSTAT0 ; 读取UART0收发状态寄存器的值LDR R0, [R2]TST R0, #0x02 ; 判断发送缓冲区是否空闲…RLOOP LDR R2, =UTRSTAT0 ; 读取UART0收发状态寄存器的值LDR R0, [R2]TST R0, #0x01 ; 判断接收缓冲区是否有数据…B TLOOP。
《测控仪器设计》(第4章)《测控仪器设计(第3版)》精选全文
(3)滚动轴承导轨
– 摩擦力矩小 – 运动灵活 – 承载能力大 – 调整方便 – 用于大型仪器(如万工显、三座标、测长机等)
(二)滚动摩擦导轨的组合应用
(1)滚动与滑动摩擦导轨 的组合应用
– 滚动轴承导轨摩擦力 小 ,运动灵活 ,用做
导向
滚动轴承和滑动导轨的组合 1—平面滑动导轨 2—滚动轴承导轨
导轨的几何精度包括导轨在垂直平面内与水平面内的直线度,导轨面间 的平行度和导轨间的垂直度
(2)导轨的接触精度
垂直面内的直线度
水平面内的直线度
导轨面间的平行度
(二)导轨运动的平稳性
爬行现象:在其低速运动时,导轨运动的驱动指令是均匀的
而与动导轨相连的工作台却出现一慢一快,一跳一停的现象 产生爬行现象的主要原因有: ①导轨间的静、动摩擦系数差值较大; ②动摩擦系数随速度变化; ③系统刚度差
高
液体静压
高
导轨
空气静压
高
导轨
较好 较好
好 好
大 较低 较大 较低
差 较好
好
要求不 高
要求较 高
要求高
好 要求高
成本
低 较高
高 高
(二)标准导轨的选用
b) a)
直线球滑座系列导轨 a)直线球滑座导轨 b)球滑座LSP型结构示意图
• 1.滚珠导轨
▪ (1)双V形滚珠导轨
▪ 运动灵敏度较高,能承受 不大的倾复力矩
▪ (2)双圆弧滚珠导轨
▪ 计量光学仪器中(如小型 工具显微镜、投影仪等) 使用
▪ 接触面积较大,接触点 应力较小,变形也较小, 承载能力强、寿命长。
V形滚珠导轨 a)常用双V形滚珠导轨 b)V形小圆弧导轨
c)双圆弧导轨
《计算机组成与设计》勘误表——学生版
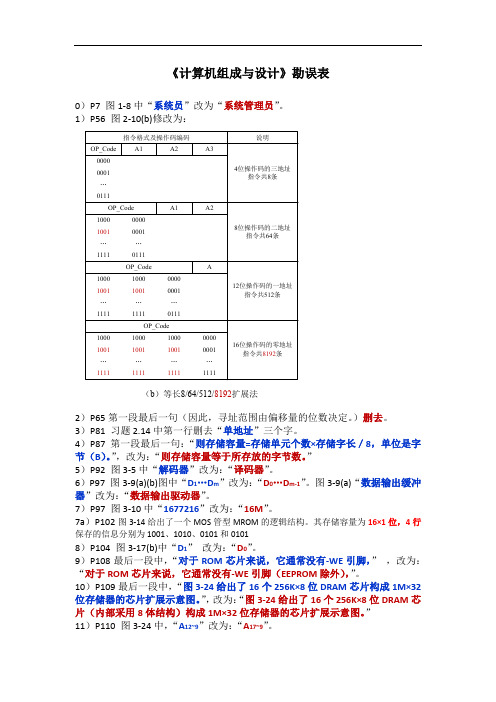
《计算机组成与设计》勘误表0)P7 图1-8中“系统员”改为“系统管理员”。
1)P56 图2-10(b)修改为:指令格式及操作码编码说明OP_Code A1A2A300000001…01114位操作码的三地址指令共8条OP_Code A1A2 10001001 (1111)8位操作码的二地址指令共64条00000001…0111OP_Code A10001001 (1111)12位操作码的一地址指令共512条00000001…011110001001…1111OP_Code10001001 (1111)16位操作码的零地址指令共8192条00000001…111110001001…111110001001…1111(b)等长8/64/512/8192扩展法2)P65第一段最后一句(因此,寻址范围由偏移量的位数决定。
)删去。
3)P81 习题2.14中第一行删去“单地址”三个字。
4)P87 第一段最后一句:“则存储容量=存储单元个数×存储字长/8,单位是字节(B)。
”,改为:“则存储容量等于所存放的字节数。
”5)P92 图3-5中“解码器”改为:“译码器”。
6)P97 图3-9(a)(b)图中“D1…D m”改为:“D0…D m-1”。
图3-9(a)“数据输出缓冲器”改为:“数据输出驱动器”。
7)P97 图3-10中“1677216”改为:“16M”。
7a)P102图3-14给出了一个MOS管型MROM的逻辑结构。
其存储容量为16×1位,4行保存的信息分别为1001、1010、0101和01018)P104 图3-17(b)中“D1”改为:“D0”。
9)P108最后一段中,“对于ROM芯片来说,它通常没有-WE引脚,”,改为:“对于ROM芯片来说,它通常没有-WE引脚(EEPROM除外),”。
10)P109最后一段中,“图3-24给出了16个256K×8位DRAM芯片构成1M×32位存储器的芯片扩展示意图。
CH01_1 微机原理 第1章绪论
主要应用: 嵌入式应用。广泛嵌入到 工业、农业、 航 空、航天、军事、通信、能源、交通 IT、 IT、金融、仪器仪 金融、仪器仪 表、保安、医疗、办公设备、娱乐 休闲、健身、体育竞 表、保安、医疗、办公设备、娱乐休闲、健身、体育竞 赛、服务领域等的产品中,已成为现代电子系统中重要的 赛、服务领域等的产品中,已成为现代电子系统中重要的 智能化工具。 学习重要性:单片机已成为电子系统中最普遍的应用手 段,除了单独设课程外,在涉及的许多实践环节,如课程 设计、毕业设计乃至研究生论文课题中,单片机系统都是 最广泛的应用手段之一。近年来,在高校中大力推行的各 种电子设计竞赛中,采用单片机系统解决各类电子技术问 题已成为主要方法之一。 请稍微留心一下我们的周围,看看周围由于应用单片机 请稍微留心一下我们的周围,看看周围由于应用单片机 后发生了什么变化?
掌握微处理器、微型机和单片机的概念及组成; 掌握计算机中常用数制及数制间的转换;(补充内 容) 掌握计算机中常用的编码BCD码和ASCII码;(补 充内容) 掌握数据在计算机中的表示方法,原码、反码及 补码。(补充内容)
第一章 基本内容:
1.1 什么是单片机 1.2 单片机的历史及发展概况 1.3 8位单片机的主要生产厂家和机型 1.4 单片机的发展趋势 1.5 单片机的应用 1.6 MCS-51系列单片机
微处理器 MPU 核心 MicroProcessor Unit
器件
微控制器 MCU MicroController Unit
embedded
微处理器 微型计算机 微型计算机系统
3、微型计算机系统
硬件系统 软件系统
微型计算机 微处理器:运算器、控制器 内存储器 ROM:ROM、PROM、 EPROM、E2PROM、Flash ROM RAM:SRAM、DRAM、iRAM 、NVRAM I/O接口:并行、串行、中断接 口、DMA接口 系统总线:数据、地址、控制总 线(DB、AB、CB) 外围设备 输入/输出设备 A/D 、D/A转换器 开关量输入/输出 终端
最新自动控制原理精品考研资料 -胡寿松第四版课本勘误表
自动控制原理—勘误表1. 自动控制的一般概念1.1 P7:图1-6给出的系统中无开环控制器(扰动补偿)。
1.2 P18:1-7题第一问后,改为“对于图1-21按用水量扰动设计的补偿装置(开环控制),当冷水温度变化时,出口热水温度如何变化?原补偿装置能否补偿这个温度变化?”1.3 P18:1-8题,“…生产过程中,在最佳湿度条件下出粉率最高,因此…”。
2. 控制系统的数学模型 2.1 P21:图2-2中, 2.2 P21:16行,“…,e C 是反电动势系数。
”2.3 P21:23行,“电动机轴上的转动惯量;)(t M c 是作用在电动机轴上的负载力矩。
”2.4 P23:式(2-17),…211z z M c +ω; 式(2-20),c c M z z M 21='。
2.5 P23:图2-5中,应标出测速电机的电压t u 极性,+接地。
2.6 P56:“(2)由系统结构图绘制信号流图”叙述混乱,注意听课。
2.7 P56:图2-41(a)是据方框图2-23(h)绘制的。
图中s M 应改为m s M M -。
2.8 P56:倒2行,“…精简节点的数目,尽可能(方便)地省去只有一个输出的节点。
例如,图2-41(b)中的节点m M 。
”删除后续部分。
2.9 P68:倒2行,“…2/T t e -”2.10 P71:题2-9中,t t e e t c --+-=221)(。
2.11 P72:图2-63中,1K -和2K -都改为K -。
2.12 P73:题2-23的表格中,1行11列的250改为230。
2.13 P74:题2-23中,“(2)若该对象可用具有延迟的二阶惯性环节…时间常数1T 和2T 。
”2.14 P74:题2-24的表格中,2行4列的0.045改为0.04;)(t y 改为)(v y 。
3. 线性系统的时域分析法3.1 P85:图3-9(a)中,n ζω应改为n ζω-。
图3-9中增加说明:(a)01<<-ζ (b)1-<ζ (c)10<<ζ (d)0=ζ (e)1=ζ(f)1>ζ3.2 P95:图3-20下一行,0.004改为0.002。
电子计量技术体系勘误表
《电子计量技术体系》勘误表Px表示第x页,Lm表示第m行,L—n表示倒数第n行。
⏹P12 L19原文:10MHz~3HGz更正:10MHz~3GHz⏹P20 图1-12 第一栏原文:电流:(10-7~10-16)A,更正:电流:(10-7~10-16)A,0.1%⏹P20 图1-12 第二栏原文:电流:0.1PA~20mA更正:电流:0.1pA~20mA⏹P23 L17原文:不确定度:1.0%更正:不确定度:(1~2.5)%⏹P27 图1-17 第二栏原文:P波段/L段波冲峰值功率标准装置更正:P波段/L波段脉冲峰值功率标准装置⏹P28 L15原文:数字存储冲波器更正:数字存储示波器⏹P28 图1-18 第一栏原文:(示波器标准仪)更正:(示波器校准仪)⏹P30 图1-19 第三栏原文:示波器标准仪检定装置脉冲幅度:±(0~1000)V,9.4×10-6时标:1ns~8s,1.2×10-8上升时间:1.75ps,1.1%频响:DC~20GHz更正:示波器校准仪检定装置脉冲幅度:±(0~1000)V,9.4×10-6时标:1ns~8s,1.2×10-8上升时间:17.5ps,1.1%频响:DC~20GHz⏹P31 L28原文:脉冲宽度范围:10ns~10ms,不确定度:1%。
更正:脉冲宽度范围:10ns~3ms,不确定度:0.95%。
⏹P32 L—10,11原文:频率范围基准:频率范围基准:更正:频率范围:频率范围:⏹P36 L—9原文:失真度标准装置更正:失真度仪检定装置⏹ P39 图1-24原文:调制度仪标准装置更正:调制度标准装置⏹ P39 L15,16原文:调频频偏范围:≤500kHz ,不确定度:0.2%;调相相偏范围:≤400rad ,不确定度:1%更正:频偏范围:≤500kHz ,不确定度:0.2%;相偏范围:≤400rad ,不确定度:1%⏹ P41 L —13原文:我部电子中南计量站建有调制度仪标准装置更正:我部电子中南计量站建有调制度标准装置⏹ P42 L7原文:载波频率范围:10Hz~99.99Hz ;更正:载波频率范围:10Hz~99.99k Hz ;⏹ P45 公式 原文:ir V V S log20= 更正:i r V V S log 20= (1.3) ⏹ P51 L —5原文:频域和调制域三个方面进行信号分析更正:频域和调制域三个方面进行分析⏹ P61 图2-1原文:数字输出参数更正:数字传输参数⏹ P66 L1原文:目前我部电子301计量站建有H 抖动分析仪标准装置 更正:目前,我部电子301计量站建有抖动分析仪标准装置 ⏹ P68 L11原文:传输速率标准需求更正:传输速率检定/校准需求⏹ P73 L —7原文:数字信号发生器与矢量信号发生器一样更正:数字信号发生器与矢量信号分析仪一样⏹ P75 图2-12 第一栏原文:频率国家基准频率:1MHz 、5MHz 、10MHz0.3×10-13更正:频率国家基准频率:1MHz 、5MHz 、10MHz3×10-13⏹ P76 L —2原文:W N AN更正:W L AN⏹P78 L8原文:3.1.1.1.3更正:3.1.1.1.3 量传关系图⏹P79 图3-2 第四栏原文:二等直流电阻标准装置电阻值:(10-3~105)Ω,±2.7×10-5更正:二等直流电阻标准装置电阻值:(10-3~105)Ω,⏹P82 图3-4 第四栏原文:微欧计接触电阻测量仪更正:微欧计、接触电阻测量仪⏹P83 L6,25原文:1000Hz更正:1k Hz⏹P92 图3-11 第一栏原文:直接比较、替代测更正:直接比较、替代测量⏹P94 L—6原文:电子计量中心须有此测量系统更正:电子计量中心持有此测量系统⏹P95 L—17原文:ε'范围:1~5更正:ε'范围:1~50⏹P98 L—9原文:频率范围:(0.5~26.5)GHz;更正:频率范围:(0.5~18)GHz;⏹P100 图3-14 第二栏原文:反射系统相位:0°~180°,1°~2°更正:反射系统相位:0°~180°,1°~5°⏹P100 图3-24 第三栏原文:剩余反射系数: 0.004~0.03,0.015更正:剩余反射系数: 0.004~0.03⏹P105 图3-17 第二栏原文:0°~999.99°更正:±(0°~999.99°)⏹P106 L20原文:RLC表和阻抗分析设备的区别在于前者给出RLC参量更正:RLC表和阻抗分析的区别在于前者给出RLC参量⏹P106 L27原文:电感两范围更正:电感量范围⏹P107 图3-18 第一栏原文:L:1mH~104H更正:L:1μH~1H⏹P124 图5-2 第二栏将“直接比较”框移至第一栏与第二栏之间的点划线上。
印刷勘误表:现代控制理论刘豹第三版
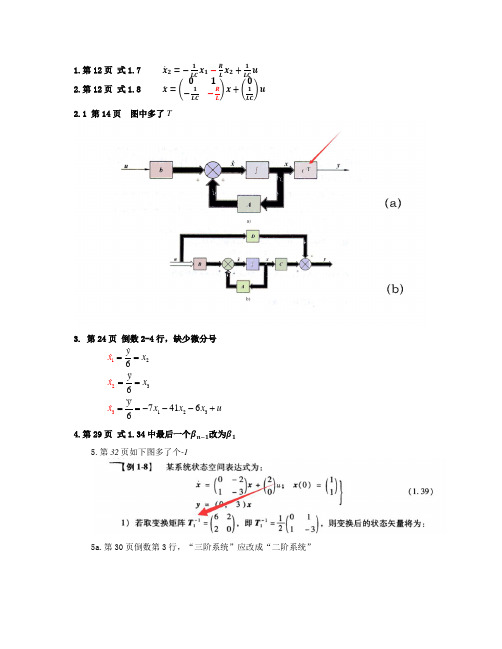
1.第12页 式1.7 x 2=−1LC x 1−R L x 2+1LC u2.第12页 式1.8 x =(01−1LC −R L )x +(01LC )u 2.1 第14页 图中多了T3. 第24页 倒数2-4行,缺少微分号123231236674166yx yx yx x x x ux x ======---+4.第29页 式1.34中最后一个βn−1改为β15.第32页如下图多了个-15a.第30页倒数第3行,“三阶系统”应改成“二阶系统”2、 36页 分为:“(1)A 阵的特征值无重根;(2)A 阵的特征值有重根;”这样的分法不是很严密,建议应该为:“(1)A 有n 个线性无关的特征向量;(2)线性无关的特征向量数少于n ”而且正确的是:J =T −1A T =[ λ10⋯000λ20⋯0⋮0⋱⋱⋯0⋮⋱⋱000⋮0λn ]2.1 45页式1.67少了BU (s )Y (s )=C (sI −A )−1BU (s )+DU (s ) (1.67) 3、 48页上面W(s)中的第三行=号左面的“”应移到上一行最末尾。
避免误解。
4、 67页2.24式应改为:5、 70页 2.31、2.32式把1改成大写的I 10()()tt I t ee -=+-A A x x A BK2.32式最后改为201()[()]tt I t eA t e --=+--A A x x A BK5a. 95页第一行5b.94页式3.13中z不应该是下标,应改为z=Λz+T −1Bu6、 97页第一行7、 100页例3-8应该改为或者改为8、 103页图3.7中的输出箭头不应该指向,应断开。
9、 126页 例3-12中10、 130页用对偶原理证明,有待考证。
表述不明确。
另外最后倒数第二行能控标准I 行,应该改为能观标准I 型。
10a. 133页式(3.104)1111111122()2}ˆˆ}0ˆˆccn n n n n n --⎡⎤⎢⎥==-⎢⎥⎣⎦AA A R AR A11. 135页 x ̂1=(0−11−2)x̂1+(0−2)x ̂2+(10)u 12. 140页c 上面多写了一横13.第141页c 上面多写了一横11、 144页式(3.124)改为12. 145页式(3.133)下一行,“m为输入矢量维数。
Freescale 汇编指令
的嵌入式系统设计》 《基于HCS12的嵌入式系统设计》 基于 的嵌入式系统设计
第3章 CPU12指令系统
3.1概述
基本概念回顾 指令:计算机能直接识别和执行的命令,即每个有效的编码组。 指令:计算机能直接识别和执行的命令,即每个有效的编码组。 指令系统:一种计算机CPU所能执行的全部指令的集合。 所能执行的全部指令的集合。 指令系统:一种计算机 所能执行的全部指令的集合 指令助记符(instruction mnemonic symbol):用一组有一定含义的字符表示的指令, 指令助记符 :用一组有一定含义的字符表示的指令, 一般采用相关的英文单词缩写。 一般采用相关的英文单词缩写。 汇编语言源程序:利用指令助记符编写的程序。 汇编语言源程序:利用指令助记符编写的程序。 操作码(Opcode):规定一条指令完成何种操作。 操作码 :规定一条指令完成何种操作。 操作数(Operand):指令所完成操作的对象。 操作数 :指令所完成操作的对象。
的嵌入式系统设计》 《基于HCS12的嵌入式系统设计》 基于 的嵌入式系统设计
3.3 寻址方式(3)
A、5位常数偏移变址寻址 、 位常数偏移变址寻址 位常数偏移变址寻址IDX(5-Bit Constant Offset Indexed Addressing) 偏移量为5位带符号数,偏移量大小为: ~ 位偏移量隐含在后随字节中, 偏移量为 位带符号数,偏移量大小为:-16~+15,5位偏移量隐含在后随字节中,有效地址为变址 位带符号数 , 位偏移量隐含在后随字节中 寄存器内容+5位地址偏移量 位地址偏移量。 寄存器内容 位地址偏移量。 B、9位常数偏移变址寻址 、 位常数偏移变址寻址 位常数偏移变址寻址IDX1(9 - Bit Constant Offset Indexed Addressing) 9位带符号偏移量的地址偏移范围:-256~+255,偏移量的符号位在后随字节中,偏移量大小在扩 位带符号偏移量的地址偏移范围: 位带符号偏移量的地址偏移范围 ~ ,偏移量的符号位在后随字节中, 展字节中,变址寄存器内容加上9位带符号常数偏移量作为操作数地址 位带符号常数偏移量作为操作数地址。 展字节中,变址寄存器内容加上 位带符号常数偏移量作为操作数地址。 C、16 位常数偏移变址寻址 、 位常数偏移变址寻址IDX2(16-Bit Constant Offset Indexed Addressing) 有效地址由变址寄存器内容加上两个偏移量扩展字节形成,可以访问 地址空间中的任何单元。 有效地址由变址寄存器内容加上两个偏移量扩展字节形成,可以访问64KB地址空间中的任何单元。 地址空间中的任何单元 3.3.6.2 自动递增/递减变址寻址IDX(Autoincrement/Autodecrement Indexed Addressing) 的变址寻址方式中, 种方法自动改变基址寄存器的内容, 在CPU12的变址寻址方式中,提供了 种方法自动改变基址寄存器的内容,并作为指令执行的一部 的变址寻址方式中 提供了4种方法自动改变基址寄存器的内容 变址寻址前或变址寻址后,变址寄存器中的数值可以加上或减去一个整数值, 分。变址寻址前或变址寻址后,变址寄存器中的数值可以加上或减去一个整数值, 增加值的范围是 0000~0111(+1~+8),减少值范围是 ~ ~ ,减少值范围是1111~1000(-1~-8)。 ~ ~ 。 对于先递增或先递减的指令,变址寄存器内容在访问内存单元之前变化, 对于先递增或先递减的指令,变址寄存器内容在访问内存单元之前变化,相当于前面常数偏移变址 寻址。而对于后递增或后递减指令,则是用变址寄存器中的初值访问内存单元, 寻址。而对于后递增或后递减指令,则是用变址寄存器中的初值访问内存单元,然后才改变变址寄 存器中的内容。 存器中的内容。 3.3.6.3 累加器偏移变址寻址IDX(Accumulator Offset Indexed Addressing) 累加器偏移变址寻址:将变址寄存器中的内容与累加器中的无符号偏移量相加,构成有效地址。 累加器偏移变址寻址:将变址寄存器中的内容与累加器中的无符号偏移量相加,构成有效地址。 为了使用这种寻址方式,偏移量必须先置于累加器中,累加器可以是A、 、 。 为了使用这种寻址方式,偏移量必须先置于累加器中,累加器可以是 、B、D。
关于李德毅院士抄袭本人研究成果的情况说明
王立新《关于李德毅院士抄袭本人研究成果的情况说明》一、时间表:1.2010年5月19日:本人应李德毅院士的邀请,参加在北京京通宾馆召开的“不确定表示的数学基础研讨会”,会上第一次听到“云模型”(早年由李院士提出)。
由于会期紧,没有学习“云模型”的细节。
2.会后至2011年7月:参加由李院士主导、主要由参加研讨会的成员组成的网上讨论。
3.2010年11月8日下午15时33分:收到由李院士的学生发来的“云模型”的算法细节,开始对其进行研究。
4.2010年11月9日下午20时51分:将一天来的研究心得写成“高斯云的定义与数学特性”一文(见下面附件1),发给全体讨论组成员。
5.2011年4月:李德毅院士作为第一作者,在《中国工程科学》(2011, 13(4):20-23)发表文章“正态云模型的重尾性质证明”(见下面附件2),其核心结果(定理1的证明)完全抄袭本人“高斯云的定义与数学特性”一文中的定理4(请读者比较下面附件1定理4的证明与附件2定理1的证明)。
二、想要说的话:1.将研究成果首先发给同行学者,这在国际学术界是通行的做法。
收到成果的人将成果作为自己的成果去发表,只字不提原创者,这是极其严重的抄袭行为。
2.李德毅院士是国内信息科学界德高望重的学者,李院士是中国人工智能学会理事长,国家自然科学基金委员会信息科学部主任,软件工程国家重点实验室学术委员会主任,973首席科学家,……。
3.本人于92年获美国南加州大学电机工程系博士学位,93至07年任教于香港科技大学电机与电子工程系。
07年从工作了14年、具有终身合同(到65岁)的香港科大辞职,移居北京,大隐于繁华,以“独立研究者”之身份向科学的高峰攀登。
本人的研究成果在国际学术界的影响可上google scholar或SCI搜lx wang。
王立新2012年4月1日(愚人节)于北京确定度年龄Ex3EnHe附件1:高斯云的定义及数学特性李老师说过云模型是在概率的基础上通过计算机算法实现的,是基于泛高斯分布形成的认知模型。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
U1
(RL+RC1) Q4
远程计算机节点 与传统测控系统„网络化测控系统 RETI
图 9-2-4 左上
2
行
内
容
更
正
图 2-1-16(a)
53 53 69 70 70 78 81 86 87 88
图 203-14(a) P1.0 口为输入 3 1~6 行 1 2 -2 1 8 -3 8 图 3-3-7(a) 右侧 1 MOV P1.0,#FFH -1 行、-2 行 结果入 A, 结果入 A, 结果商入 A 中,余数入 B 中 TLC1549 与 89C51 接口电路 MOV THL,#00H CLR SCLX SETB CSLK
* P 1 ( x)
179 182
6、7、12、17 行 3 3~9 行
* p1 ( x)
(小写 p 改大写 P)
183 184 206 209 210 211
-1 3 -8 1 图 5-4-5 右侧 图 5-4-8 左侧
DEC DEC
R0 R0
删去 INC R0
这一方法适用于多容量自平衡 系统 状态频率改变 DC
INTI
;转初始化 ;中断返回
INT:LJMP RETI 再根据特征码 DB
INT1
;转初始化 ;中断返回
7DH,07FH,7FH,
7DH,07H,7FH,
图 3-4-17 左上
135
图 3-5-13 右下
158
图 4-4-1 中左
TEST1
TEST2
1
图 4-4-1 中右 159 161 163 178 179 -14 图 4-4-3 3 4行 2、3 行 1 4行
P1 口为输入 MOV P1,#FFH 结果在 A 中, 结果在 A 中, 结果商在 A 中,余数在 B 中 TLC1549 与 89C51 的 SPI 接口电路 MOV TH1,#00H CLR SETB SCLK SCLK
95 96 100 108 114
2 -4
6 -1 -9 -10
ห้องสมุดไป่ตู้
INT:LJMP RET1 在根据特征码 DB
这一方法是模拟 PID 参数的响应曲 线整定方法的推广 状态频繁改变 DV
211 234 248 268 322 322 341
-5 图 7-1-3 左侧 (7-2-12)式 2 3 3、4 1 11
对控制量 US
对控制量 MV
U
(RL+RC2) Q14
远程 PC 节点 与传统测控技术„网络化测控技术 RET1
TEST2 ORG4000H ALARM: MOV DPTR,#SAMP X 1>MAX 图 4-2-1(b) ,(d)中
TEST1 ORG ALARM: MOV X 1>MAX1 图 4-5-1(b) 、(d)中 4000H DPTR,#SAMP
式(4-6-16)
* pn ( x)
Pn* ( x) (小写 p 改大写 P)
《微机测控系统原理与设计》第 1 次印刷勘误表
注:下表中所列错误为 2013 年 12 月第 1 版第 1 次印刷的错误,重印时将全部更正。 下表“段” 、 “行”栏中,数字 n 前有负号,表示倒数第 n,无负号表示顺数第 n。 段 页
6 6 7 28 3 4 1 2 1 2 鼠标器 安装于 PC 箱外部 安装于 PC 箱外部 鼠标 安装于 PC 机箱外部 安装于 PC 机箱外部