zdkz3-2
[精品]物质在水中的分散状况说课
![[精品]物质在水中的分散状况说课](https://img.taocdn.com/s3/m/628f6809227916888486d763.png)
合作学习
HEZUOXUEXI
五、知识应用和拓展
学以致用:对溶液、悬浊液、乳浊液的特征及 其区分和溶液中溶质、溶剂的判断等内容的相 关题型进行巩固
合作学习
HEZUOXUEXI
六、反思和困惑
1、分组实验时,学生都急于操作,如何提高实效;
2、怎样更好的落实实验操作的规范性;
teRS1igLl%f)%VqqCIqBX1#6wNCS6j3csv513!j)OhmL2dZU QtG0uEc0VliuBmC*ji LgNVm( xI9Tjq WqSP1sGptC w%Lw0t4OF )6gKEj+0E% m1kqB+3(*jf0% d6#T5 0ZZina- r7!yH2ASCGLzXu0obfh+ k#ys#azctyKahdhLNGXtptmWLGpNp5IOt)R+ ($4P8Abmfl6pYkv3YF0#HK20XR1$LBMV18WZ- (A8cs5vSkiAY(F xq2d%BsV- dNQ$0W3xWMhKa+ wTi w1Pj vD&xu2Fa+ bqs(NV8&w- Qxxxe6Kg6yU C+$+ yULrc9r U50cR vBfGXKW vpPRRF)L7GDfF N mduVNowz1S2KVR NpvVITBoJF G9VY&pK)Qte&+8v*abW+3El*2MqY9s8uB$J%9w7GmuCZju3W2So7QD) kNU kT w$6b7AXS3XoH#!#FmCB8x4K$x#*E$K$wJ urJ+R6nm7LX&YUT bk8ZoSnQXH55&b3C )S$WmPkDiq%6bstuooxkmGT0F WHCD X$5FM ATa&of&#
ZD型系列-锥形电机

ZD系列锥形电机本系列电机为锥形转子三相异步电动机,带有自动刹车装置,具有起动转矩大、制动可靠、结构紧凑、工作平稳、体积小、重量轻以及使用安全、维护方便等特点。
本系列电机常用于起重运输机械行业,特殊的机械设备要求能迅速制动、频繁起动、正反交替运行的场所。
不适用于有易燃易爆及有熔化金属、有危险、酸碱类蒸汽的工作环境。
本系列电机型号有:ZDY、ZD、ZDR、ZDW、ZDX、ZDS I(ZDM I 和ZD I)电机组,功率:0.2kW-24kW;0.5T-16T,防护等级IP44、IP54。
主要技术参数型号项目额定功率kW额定电流A额定转速r/min起动转矩起动电流A效率%功率因素cosφ磁拉力kg制动力矩N·m额定转矩ZD I 12-4 0.4 1.25 1380 2 7 67 0.72 15 4.41ZD I21-4 0.8 2.4 1380 2.5 13 70 0.72 24 8.34ZD I22-4 1.5 4.3 1380 2.5 24 72 0.74 36 16.67 ZD I 31-4 3.0 7.6 1380 2.7 42 79 0.77 74 34.32 ZD I 32-4 4.5 11 1380 2.7 60 78 0.80 98 49.03 ZD I 41-4 7.5 18 1400 3 100 79 0.80 153 83.3ZD I 51-4 13 30 1400 3 165 80 0.82 198 147.10 ZD I52-4 18.5 42 1400 3 229 82 0.82 252 ZDX 62-6 18.5 43 960 2.8 202 84 0.83 390ZD I62-4 24 55 1400 2.8 300 83 0.82 390ZDY系列锥形转子电动机,起动平稳,制动安全,且能与减速机配套,用于驱动起重机械及高效率机械和其它需要制动平缓的传动机械。
工程施工机械设备表
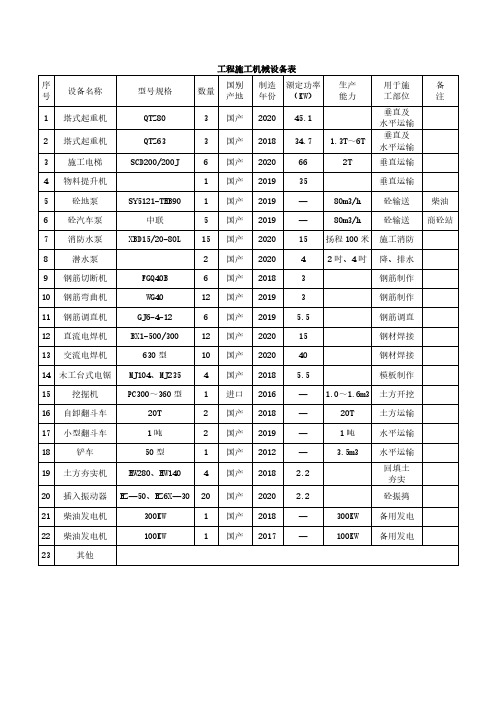
工程施工机械设备表序号设备名称型号规格数量国别产地制造年份额定功率(KW)生产能力用于施工部位备注1塔式起重机QTZ803国产202045.1垂直及水平运输2塔式起重机QTZ633国产201834.7 1.3T~6T垂直及水平运输3施工电梯SCD200/200J6国产2020662T垂直运输4物料提升机1国产201935垂直运输5砼地泵SY5121-THB901国产2019—80m3/h砼输送柴油6砼汽车泵中联5国产2019—80m3/h砼输送商砼站7消防水泵XBD15/20-80L15国产202015扬程100米施工消防8潜水泵2国产202042吋、4吋降、排水9钢筋切断机FGQ40B6国产20183钢筋制作10钢筋弯曲机WG4012国产20193钢筋制作11钢筋调直机GJ6-4-126国产2019 5.5钢筋调直12直流电焊机BX1-500/30012国产202015钢材焊接13交流电焊机630型10国产202040钢材焊接14木工台式电锯MJ104、MJ2354国产2018 5.5模板制作15挖掘机PC300~360型1进口2016— 1.0~1.6m3土方开挖16自卸翻斗车20T2国产2018—20T土方运输17小型翻斗车1吨2国产2019—1吨水平运输18铲车50型1国产2012— 3.5m3水平运输19土方夯实机HW280、HW1404国产2018 2.2回填土夯实20插入振动器HZ—50、HZ6X—3020国产2020 2.2砼振捣21柴油发电机300KW1国产2018—300KW备用发电22柴油发电机100KW1国产2017—100KW备用发电23其他。
ZD型系列-锥形电机
ZD系列锥形电机本系列电机为锥形转子三相异步电动机,带有自动刹车装置,具有起动转矩大、制动可靠、结构紧凑、工作平稳、体积小、重量轻以及使用安全、维护方便等特点。
本系列电机常用于起重运输机械行业,特殊的机械设备要求能迅速制动、频繁起动、正反交替运行的场所。
不适用于有易燃易爆及有熔化金属、有危险、酸碱类蒸汽的工作环境。
本系列电机型号有:ZDY、ZD、ZDR、ZDW、ZDX、ZDS I(ZDM I 和ZD I)电机组,功率:0.2kW-24kW;0.5T-16T,防护等级IP44、IP54。
主要技术参数型号项目额定功率kW额定电流A额定转速r/min起动转矩起动电流A效率%功率因素cosφ磁拉力kg制动力矩N·m额定转矩ZD I 12-4 0.4 1.25 1380 2 7 67 0.72 15 4.41ZD I21-4 0.8 2.4 1380 2.5 13 70 0.72 24 8.34ZD I22-4 1.5 4.3 1380 2.5 24 72 0.74 36 16.67 ZD I 31-4 3.0 7.6 1380 2.7 42 79 0.77 74 34.32 ZD I 32-4 4.5 11 1380 2.7 60 78 0.80 98 49.03 ZD I 41-4 7.5 18 1400 3 100 79 0.80 153 83.3ZD I 51-4 13 30 1400 3 165 80 0.82 198 147.10 ZD I52-4 18.5 42 1400 3 229 82 0.82 252 ZDX 62-6 18.5 43 960 2.8 202 84 0.83 390ZD I62-4 24 55 1400 2.8 300 83 0.82 390ZDY系列锥形转子电动机,起动平稳,制动安全,且能与减速机配套,用于驱动起重机械及高效率机械和其它需要制动平缓的传动机械。
8001已见发行514种冠号
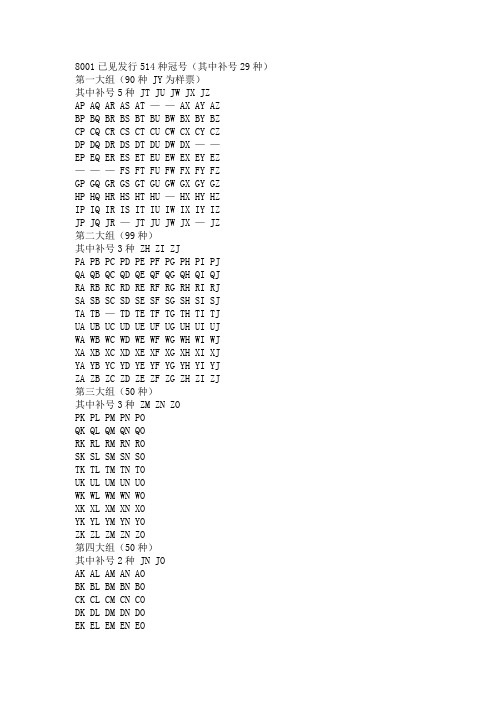
8001已见发行514种冠号(其中补号29种)第一大组(90种 JY为样票)其中补号5种 JT JU JW JX JZAP AQ AR AS AT —— AX AY AZBP BQ BR BS BT BU BW BX BY BZCP CQ CR CS CT CU CW CX CY CZDP DQ DR DS DT DU DW DX ——EP EQ ER ES ET EU EW EX EY EZ——— FS FT FU FW FX FY FZGP GQ GR GS GT GU GW GX GY GZHP HQ HR HS HT HU — HX HY HZIP IQ IR IS IT IU IW IX IY IZJP JQ JR — JT JU JW JX — JZ第二大组(99种)其中补号3种 ZH ZI ZJPA PB PC PD PE PF PG PH PI PJQA QB QC QD QE QF QG QH QI QJRA RB RC RD RE RF RG RH RI RJSA SB SC SD SE SF SG SH SI SJTA TB — TD TE TF TG TH TI TJUA UB UC UD UE UF UG UH UI UJWA WB WC WD WE WF WG WH WI WJXA XB XC XD XE XF XG XH XI XJYA YB YC YD YE YF YG YH YI YJZA ZB ZC ZD ZE ZF ZG ZH ZI ZJ第三大组(50种)其中补号3种 ZM ZN ZOPK PL PM PN POQK QL QM QN QORK RL RM RN ROSK SL SM SN SOTK TL TM TN TOUK UL UM UN UOWK WL WM WN WOXK XL XM XN XOYK YL YM YN YOZK ZL ZM ZN ZO第四大组(50种)其中补号2种 JN JOAK AL AM AN AOBK BL BM BN BOCK CL CM CN CODK DL DM DN DOEK EL EM EN EOFK FL FM FN FOGK GL GM GN GOHK HL HM HN HOIK IL IM IN IOJK JL JM JN JO第五大组(50种)其中补号2种 NY NZKP KQ KR KS KT KU KW KX KY KZLP LQ LR LS LT LU LW LX LY LZMP MQ MR MS MT MU MW MX MY MZNP NQ NR NS NT NU NW NX NY NZOP OQ OR OS OT OU OW OX OY OZ第六大组(95种)其中补号7种 JA ** JC JG JH JI JJAA AB AC AD AE AF AG AH AI AJBA BB BC BD BE BF BG BH BI —CA CB CC CD CE CF CG CH CI CJDA — DC DD DE DF DG DH DI DJEA EB EC ED —— EG EH EI EJFA FB FC FD FE FF FG FH FI FJGA GB GC GD GE GF GG GH GI GJHA HB HC HD HE HF HG HH HI HJIA IB IC ID IE IF IG IH II IJJA ** JC — JE JF JG JH JI JJ第七大组(12种)其中补号1种 NJKA KB KC KD KE KF KG KH KI KJ—— MC ———————————————— NJ第八大组(68种)其中补号6种 ZT ZU ZW ZX ZY ZZPP PQ PR PS PT PU PW PX PY PZQP QQ QR ———— QX QY QZRP RQ RR RS RT RU RW RX RY RZSP —— SS — SU SW SX SY —TP TQ TR TS TT TU TW TX TY TZUS UUWP WQ — WS WT WU WW WX WY ——— XR XZ YP — YR YS ——— YX — YZZP ZQ ZR — ZT ZU ZW ZX ZY ZZ注:8001冠号仍在陆续发行中。
农村集体土地确权_图层字段属性表
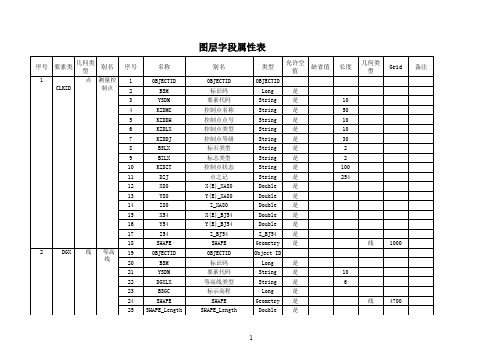
类型
Geometry Object ID Long String String String String OBJECTID Long String Double String String String String String String String Geometry Double Object ID Long String String String Double
类型
String String Geometry Double Double Object ID Long String String Double String String Geometry Double Double Object ID Long String String String String String String String String String
序号
78 79 80 81 82
名称
SFBH BZ SHAPE SHAPE_Length SHAPE_Area OBJECTID BSM YSDM BHQBH JBNTMJ PZWH PZWJ SHAPE SHAPE_Length SHAPE_Length OBJECTID BSM YSDM JBNTTBBH TBBH DLBM DLMC QSXZ QSDWDM QSDWMC ZLDWDM
别名
OBJECTID 标识码 要素代码 控制点名称 控制点点号 控制点类型 控制点等级 标石类型 标志类型 控制点状态 点之记 X(E)_XA80 Y(E)_XA80 Z_XA80 X(E)_BJ54 Y(E)_BJ54 Z_BJ54 SHAPE OBJECTID 标识码 要素代码 等高线类型 标示高程 SHAPE SHAPE_Length
伊士顿电梯无机房原理图

SJD
COMD
SSD SXD
D
轿顶(接线箱JJX-5)
轿厢(操纵厢)
检修测试组合DJB
P10(4,C2) P09(4,C2)
FK6(1P5A)
C
100(1,2D) 101(1,2D)
C
1Байду номын сангаас4
410
5 5
KRO1 KRC1
9 411 9 412
变频门机
M 3~ M2(A) GND2(5,C1) P22(5,D3) P23(5,D3) 420
13 14 D6 A2 2
14 D5
1
1
校 对
KCB KBZ SC1
2
SQ1 SQ2
伊士顿电梯
A
注2*
3
3 4
(GND3)J4-8 (+5V)J4-9 (2H)J5-4 (2L)J5-5
DEB
远程 调试板
C
D
B
1
2
3
4
MC2/3000
J5-3 J5-5 J5-4 GND1 2L
D
2H
VCC IN(PSZ) IN(PXZ)
A A
设 计 审 核
1
校 对 批 准
标准化
伊士顿电梯 EASTERN ELEVATORS
2 3
TELEPHONE 五方对讲电话
DQ0128-006
版本/次数 D/0
4
共14页 第6页
1
2
3
4
P07 GND2(4,C1)
D
P08 SJC SJF COMC SSC SXC COMF SXF SSF
X08(J1-9)
SHC2 5
ZD系列渣浆泵参数

ZD系列渣浆泵参数特点和用途:ZD系列渣浆泵是我公司开发生产的新型高效节能、抗腐蚀、耐磨蚀泵。
该系列泵在水力设计、结构设计以及耐磨材料上,吸收了国内外同类产品的优点并加以创新。
具有高效节能、振动小、噪声低、运行可靠、使用寿命长、维修方便等特点。
泵的综合性能居国内领先水平,大部分泵的效率指标居国际先进水平。
该型泵可广泛应用于电力、冶金、煤炭、建材等行业输送含有固体颗粒的浆体。
如:火电厂水力除灰,冶金选矿厂矿浆输送,洗煤厂煤浆及重介输送等。
其允许输送的最大浆体的重量浓度:灰(渣)浆和煤浆45%;矿浆和重介60%。
型号意义说明:如 : 600ZD-G38B600: 泵出口直径(mm)Z : 杂质泵D : 单泵壳(单蜗壳)G : 给料38 : 叶轮直径 (cm)B : 叶轮叶片数4枚A为5枚(可省略),B为4枚,C为3枚,D为2枚,F为6枚,G为7枚,H为8枚。
Z D 系列渣浆泵主要技术参数型号允许配带最大功率流量扬程转速最高效率汽蚀余量间断通过最大粒度泵重N(KW) Q(m3/h) H(m) n(r/min) η(%) NPSHr(m) (mm) T(Kg)600ZD-82 500 1664-5600 5.2-27.8 300-595 88.3 2.2 152 4900 300ZD-60 400 580-2403 8.9-53.1 490-989 81.1 4.3 96 2790 200ZD-45B 90 138-638 5.7-30.4 490-980 80.8 2.0 51 1750 150ZD-60 450 156-704 28.9-150.0 700-1480 70.7 2.1 39 1657 150ZD-55B 132 139-630 11.3-53.7 490-990 78.1 2.3 56 1540。
全国第二次土地调查城镇地籍数据库标准详细
全国第二次土地调查城镇地籍数据库标准详细文档编制序号:[KK8UY-LL9IO69-TTO6M3-MTOL89-FTT688]TD城镇地籍数据库标准Standard For Urban Cadastral Database中华人民共和国国土资源部发布目次前言本标准的附录A为资料性附录。
本标准由国土资源部提出。
本标准由国土资源部信息化工作办公室归口。
本标准起草单位:国土资源部信息中心、中国土地勘测规划院。
本标准主要起草人:蒋文彪、查宗祥、胡小华、赵岱虹、温明炬、张子平、吴洪涛、张炳智、徐建新、周竹军、戴建旺、陈金。
本标准由国土资源部信息化工作办公室负责解释。
引言为规范城镇地籍数据库的内容、数据库结构、数据交换格式,促进城镇地籍数据的管理和共享,根据《中华人民共和国土地管理法》等法律、法规,参照《第二次全国土地调查技术规程》、《土地登记规则》、《城镇地籍调查规程》等相关标准和规程,制定本标准。
城镇地籍数据库标准1 范围本标准规定了城镇地籍数据库的内容、要素分类代码、数据分层、数据文件命名规则、图形和属性数据的结构、数据交换格式和元数据等。
本标准适用于城镇地籍数据库建设及数据交换。
2 规范性引用文件下列文件中的条款通过本标准的引用而成为本标准的条款。
凡是注日期的引用文件,其随后所有的修改单(不包括勘误的内容)或修订版均不适用于本标准,然而,鼓励根据本标准达成协议的各方研究是否可使用这些文件的最新版本。
凡是不注日期的引用文件,其最新版本适用于本标准。
GB/T 2260 中华人民共和国行政区划代码GB/T 4880-1991 语种名称代码GB/T 7929 1∶500 1∶1000 1∶2000 地形图图式GB/T 13923-2006 基础地理信息要素分类与代码GB/T 13989 国家基本比例尺地形图分幅和编号GB/T 16820-1997 地图学术语GB/T 17798 地球空间数据交换格式GB/T 19231 土地基本术语GB/T 21010-2007 土地利用现状分类CH/T 1007 基础地理信息数字产品元数据CJJ8-1999 城市测量规范TD1001 城镇地籍调查规程TD/T 1016 国土资源信息核心元数据TD/T 1014-2007 第二次全国土地调查技术规程3 术语和定义下列术语和定义适用于本标准。
ZD系列锥形电机型号规格

锥形电动机详细介绍:锥形转子电动机,江苏三马起重机械制造有限公司专业生产。
ZD、DY系列锥形转子电动机为封闭、自扇冷式、带制动装置的笼型电动机,是配套电动葫芦的专用电机。
ZD系列、ZDY系列电动机具有结构牢固可靠。
过载能力强,调节方便等特点,ZD 系列电动机适用于电动葫芦提升或要求具有较大制动力矩的机械装置;ZDY系列电动机适用于电动葫芦运行或要求较小制动力矩的机械装置。
工作方式:断续定额S3工作制,其负载持续率分为25%、40%、60%三种,25%为基准负载持续率,每个周期为10min,额定电压为380V,额定频率为50Hz,绝缘等级为B级。
ZD系列、ZDY底座不带底脚,安装孔在前端盖的凸缘上(1MB5)、ZD系列电动机在传动端盖上具有大凸缘,ZDY系列电动机具有小凸缘,轴伸采用矩形花键联接,矩形花键符合GB1144-77《矩形花键联结》的规定。
电动机>> ZD1型锥型转子起升电动机产品功能:●适用范围:本系列电机是电动葫芦的起升电动机,或用于要求起动转矩较大及制动力矩较大的驱动装置,也可以在起重运输机械、机床、生产流水线和其它需要迅速制动的场合中使用。
本系列电机采用50Hz,380V电源。
基准工作制S3,负载持续率25%,通电起动次数为每小时120次。
●结构简介:本系列电机为卧式电动机,采用圆锥面制动器,输出端轴伸为矩形花键,机座不带底脚,前端盖有凸缘(法兰式),安装孔在前端盖凸缘上。
本系列电动机为封闭式结构,防护等级IP44,冷却方式为电动机>> ZDR型锥型转子绕线电动机产品功能:●适用范围:本系列电动机可串电阻起动,使其机械特性能人为的随意变软,能在较小的起动电流下提供较大的起动转动转矩,可进行小范围的调速,起动平稳,制动安全可靠。
且与减速机配套,用于驱动起重运输机械及高效率机械和其它需要迅速制动的传动机械。
对起动负载大及配电容量不足而用笼型锥形电动机不能顺利起动时,可采用本系列电动机。
四版人民币冠号大全

四版人民币冠号大全四版人民冠号大全一、一角8001已见发行514种冠号(其中补号29种)第一大组(90种JY为样票)AP、AQ、AR、AS、AT、——AX、AY、AZ BP、BQ、BR、BS、BT、BU、BW、BX、BY、BZCP、CQ、CR、CS、CT、CU、CW、CX、CY、CZ DP、DQ、DR、DS、DT、DU、DW、DX、——EP、EQ、ER、ES、ET、EU、EW、EX、EY、EZ ———FS、FT、FU、FW、FX、FY、FZGP、GQ、GR、GS、GT、GU、GW、GX、GY、GZ HP、HQ、HR、HS、HT、HU、— HX、HY、HZIP、IQ、IR、IS、IT、IU、IW、IX、IY、IZ JP、JQ、JR、— JT、JU、JW、JX — JZ其中补号5种JT、JU、JW、JX、JZ第二大组(99种)PA、PB、PC、PD、PE、PF、PG、PH、PI、PJ QA、QB、QC、QD、QE、QF、QG、QH、QI、QJRA、RB、RC、RD、RE、RF、RG、RH、RI、RJ SA、SB、SC、SD、SE、SF、SG、SH、SI、SJTA、TB — TD、TE、TF、TG、TH、TI、TJ UA、UB、UC、UD、UE、UF、UG、UH、UI、UJWA、WB、WC、WD、WE、WF、WG、WH、WI、WJXA、XB、XC、XD、XE、XF、XG、XH、XI、XJ YA、YB、YC、YD、YE、YF、YG、YH、YI、YJ ZA、ZB、ZC、ZD、ZE、ZF、ZG、ZH、ZI、ZJ其中补号3种ZH ZI ZJ第三大组(50种)PK、PL、PM、PN、POQK、QL、QM、QN、QORK、RL、RM、RN、ROSK、SL、SM、SN、SOTK、TL、TM、TN、TOUK、UL、UM、UN、UOWK、WL、WM、WN、WOXK、XL、XM、XN、XOYK、YL、YM、YN、YOZK、ZL、ZM、ZN、ZO其中补号3种ZM ZN ZO第四大组(50种)其中补号2种JN JOAK、AL、AM、AN、AOBK、BL、BM、BN、BOCK、CL、CM、CN、CODK、DL、DM、DN、DOEK、EL、EM、EN、EO** JC — JE、JF、JG、JH、JI、JJ第七大组(12种)其中补号1种NJKA、KB、KC、KD、KE、KF、KG、KH、KI、KJ —— MC ———————————————— NJ第八大组(68种)其中补号6种ZT ZU ZW ZX ZY ZZPP、PQ、PR、PS、PT、PU、PW、PX、PY、PZ QP、QQ、QR ———— QX、QY、QZRP、RQ、RR、RS、RT、RU、RW、RX、RY、RZ SP、—— SS — SU、SW、SX、SY —TP、TQ、TR、TS、TT、TU、TW、TX、TY、TZ US、UUWP、WQ — WS、WT、WU、WW、WX、WY ——— XR、XZYP — YR、YS ——— YX — YZZP、ZQ、ZR — ZT、ZU、ZW、ZX、ZY、ZZ注:8001冠号仍在陆续发行中。
ZD6型电动转辙机
第一章ZD6型电动转辙机ZD-6型电动转辙机在丹东车间管内分单机牵引道岔河双机牵引道岔两种方式,电路动作分为单动、双动、三动。
本次培训旨在让大家对电转辙机电路有比较简单的认识和初步分析能力,所以选择了单机、单动电路作为模版,希望能起到举一反三的作用。
我把ZD6型电动转辙机按其工作性质及故障判断方式分为三个部分,这和教科书里说得有些异样,但就我个人而言这样更有利于对这个电路进行分析和对故障的判断。
第一讲开关控制电路开关控制电路既室内控制部分,如图所示;该电路电源为KZ、KF和条件电源。
选排进路进路时,由DCJ 或FCJ 经选路电路提供KF 电源,这里就不一一赘述。
单操道岔时受控制台ZDA(J)、ZFA(J)控制,提供KF-ZDJ、KF-ZFJ电源。
整个电路器材为两台继电器:1DQJ、2DQJ。
受控条件:1、该道岔区段SJ(强制条件);##道岔按钮在定位(未拔出)。
2、选路时:DCJ 或FCJ ;3、单操时:AJ 、ZDJ /ZFJ 。
1、1 开关控制电路的器材运用1DQJ:JWJXC-125/0.44 双线圈单独使用;线圈:3--4 、125Ω,ф0.2mm;电压控制24V。
缓放时间0.35s—0.4s.线圈:1---2、在该电路不起作用。
2DQJ:JYJXC-135/220 双线圈单独使用;残圈:1.2 、135Ω,ф0.23mm;残圈:3.4 、220Ω,ф0.21mm。
2、3为KZ电源、1、4为KF电源。
极性保持型,即通电时动作后,停电时保持状态,另一线圈不通电将一直保持在该位置,不得同时供电。
当3、4线圈供电道岔在定位时,继电器在吸合状态(检修所称为反位)。
当1、2线圈供电道岔在反位时,继电器在落下状态(检修所称为定位)。
1DQJ在整个电路中起开关作用;1、为2DQJ提供动作电源KZ。
2、控制电机启动电源DZ/DF220V。
记住,只管启动,不管断电。
2DQJ在电路中起控制方向的作用1、控制电机转动方向,因为直流电机1或2受电会改变电机的转动方向,而控制谁受电则是2DQJ接通接点和转辙机所处位置的共同作用。
城轨道岔控制电路认识与维护—六线制道岔控制电路分析与维护
2DQJF
1
2
3
4
05-17
C
X3
05-18
D
X4
KF
DD
F1
主机
5
电缆盒
3 2 1
B1 B2 B3
M H
12345
CJ
Q
10 9 14 13
8 7
B1 B2 B3 B4 7 8 9 10
41
31
42
32
43
33
44

34
02 01
45 46
1
35 36
3
21
11
22
12
23
13
24

14
04 03
4
C
111 113 2DQJF 112
01-5
E
X5
05-16
B
X2
05-15
A
X1
220V
Ⅱ1
Ⅱ2
Ⅱ
R
1
2
1 RD4 2 Ⅰ1 DJZ220 容量
DF220
BB
Ⅰ 220V Ⅰ2
RD1
2
1
DJF220
容量 122 2DQJ
1DQJ
RD2 123 121
2
DF220
2
1
容量
141 143 KZ
2DQJ 142
5. 双动道岔控制电路分析
以ZD6型电动转辙机为道岔提供转换动力为例,分析双动道岔首动道岔由2台转辙机牵引 末动道岔由1台转辙机牵引。
首末动道岔不同时动作,到首动道岔完成转换后,再沟通末动道岔完成转换, 最后接通表示电路。
5. 双动道岔控制电路分析
城镇地籍数据库标准

城镇地籍数据库标准Urban cadastre database standard_____________________________________________________________________1 范围本标准规定了城镇地籍要素的分类代码,几何特征,数据分层,属性数据结构,数据交换格式等。
适用于城镇地籍数据库建设及数据交换。
2 引用标准下列标准所包含的内容,通过本标准的引用而构成本标准的组成部分。
本标准发布时,所示版本均为有效。
所有标`准都会被修订,使用本标准的各方应探讨使用下列标准最新版本的可能性。
GB/T 17798—1999 《地球空间数据交换格式》国土资源部《土地登记规则》国土资源部《城镇地籍调查规程》GB/T 2260—1999 《中华人民共和国行政区划代码》GB/T 7929—1995 《1:500 1:1000 1:2000 地形图图式》3 术语本标准采用以下定义。
3.1 现象phenomenon城镇地籍所描述的事实或存在。
3.2 要素feature城镇地籍所描述的现象。
3.3 目标object对一个要素的全部或部分的数字表示。
3.4 类class具有共同特性和关系的一组要素的集合。
3.5 属性attribution要素的特性描述。
3.6矢量数据vector data以x,y(或x, y, z)坐标表示的点、线、面(或包含体) 等空间图形数据及与其相联系的属性数据总称。
3.7 图像数据image data用数值表示各像素(pixel)的灰度值的集合。
3.8 标识码identification code对某一要素进行唯一标识的代码。
3.9 元数据metadata对数据的内容、质量、状况及其它特征的描述。
4 城镇地籍要素的分类原则与地籍号命名规则4.1 城镇地籍要素的分类采用线分类法,根据分类编码通用原则,将城镇地籍要素分为六大类,并依次分为小类、一级类,分类代码采用四位数字层次码组成,其结构如下:XXXX||| |大小一扩类类级充码码类码码其中:(1) 大类码、小类码、一级类码、扩充码分别用一位数字顺序排列;(2) 一级类以下的代码可以用扩充码进行扩充;(3) 扩充码一般为0。
国土资源部发布土地行业相关标准
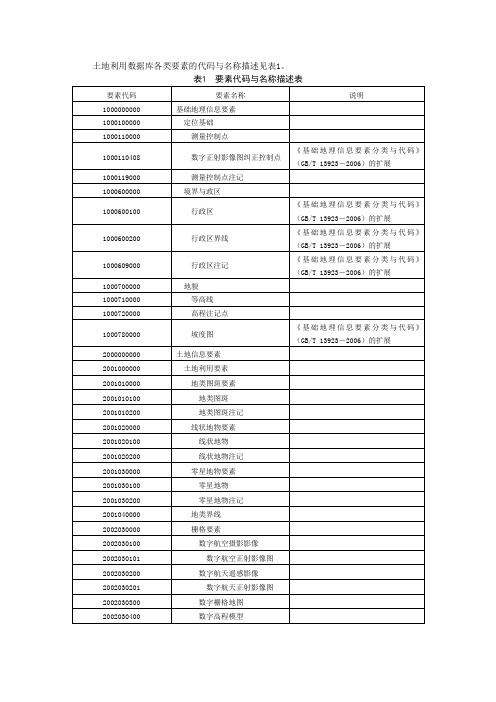
土地利用数据库各类要素的代码与名称描述见表1。
1 数据库结构定义1.1 空间要素分层空间要素采用分层的方法进行组织管理,层名称及各层要素见表2。
表2 层名称及各层要素1.2 空间要素属性结构1.2.1 测量控制点属性结构表3 测量控制点属性结构描述表(属性表名:CLKZD)1.2.2 数字正射影像图纠正控制点属性结构表4 数字正射影像图纠正控制点属性结构描述表(属性表名:JZKZD)表5 行政区属性结构描述表(属性表名:XZQ)1.2.5 等高线属性结构表7 等高线属性结构描述表(属性表名:DGX)1.2.6 高程注记点属性结构表8 高程注记点属性结构描述表(属性表名:GCZJD)1.2.7 坡度图属性结构1.2.8 地类图斑属性结构表10 地类图斑属性结构描述表(属性表名:DLTB)1.2.10 零星地物属性结构1.2.11 地类界线属性结构表14 宗地属性结构描述表(属性表名:ZD)1.2.12.1 权利人扩展属性结构表15 权利人扩展属性结构描述表(属性表名:ZD_QLR)表16 权属来源证明扩展属性结构描述表(属性表名:ZD_QSLYZM)1.2.12.3 权属调查扩展属性表结构表17 权属调查扩展属性结构描述表(属性表名:ZD_QSDC)1.2.12.4 注册登记扩展属性结构1.2.12.5 他项权利登记扩展属性结构表20 界址线属性结构描述表(属性表名:JZX)表21 界址点属性结构描述表(属性表名:JZD)表22 基本农田保护区属性结构描述表(属性表名:JBNTBHQ)1.2.15 表A.1 基本农田保护片(块)属性结构表(属性表名:JBNTBHPK)1.2.17 栅格数据属性结构1.2.18 开发园区属性结构表24 开发园区属性结构描述表(属性表名:KFYQ)1.2.19 注记属性结构表25 注记属性结构描述表(属性表名:ZJ)1.3 属性值代码1.3.1 控制点类型代码表26 控制点类型及等级代码表11.3.2 标石类型代码表27 标石类型代码表1.3.3 标志类型代码表28 标志类型代码表1.3.4 界线类型代码表29 界线类型代码表1.3.5 界线性质代码1.3.6 等高线类型代码1.3.7 权属性质代码表32 权属性质代码表1.3.8 坡度级别代码1.3.9 地类界线类型代码31.3.10 土地使用权类型代码表35 土地使用权类型代码表1.3.11 证件类型代码1.3.121.3.13 界址线位置代码1.3.14 界标类型代码1.3.15 界址点类型代码表40 界址点类型代码表1.3.165。
四版人民币冠号大全88637
四版人民冠号大全一、一角8001已见发行514种冠号(其中补号29种)第一大组(90种 JY为样票)AP、AQ、AR、AS、AT、——AX、AY、AZ BP、BQ、BR、BS、BT、BU、BW、BX、BY、BZ CP、CQ、CR、CS、CT、CU、CW、CX、CY、CZ DP、DQ、DR、DS、DT、DU、DW、DX、——EP、EQ、ER、ES、ET、EU、EW、EX、EY、EZ ———FS、FT、FU、FW、FX、FY、FZGP、GQ、GR、GS、GT、GU、GW、GX、GY、GZ HP、HQ、HR、HS、HT、HU、— HX、HY、HZIP、IQ、IR、IS、IT、IU、IW、IX、IY、IZ JP、JQ、JR、— JT、JU、JW、JX — JZ 其中补号5种 JT、JU、JW、JX、JZ第二大组(99种)PA、PB、PC、PD、PE、PF、PG、PH、PI、PJ QA、QB、QC、QD、QE、QF、QG、QH、QI、QJ RA、RB、RC、RD、RE、RF、RG、RH、RI、RJ SA、SB、SC、SD、SE、SF、SG、SH、SI、SJ TA、TB — TD、TE、TF、TG、TH、TI、TJ UA、UB、UC、UD、UE、UF、UG、UH、UI、UJ WA、WB、WC、WD、WE、WF、WG、WH、WI、WJ XA、XB、XC、XD、XE、XF、XG、XH、XI、XJYA、YB、YC、YD、YE、YF、YG、YH、YI、YJ ZA、ZB、ZC、ZD、ZE、ZF、ZG、ZH、ZI、ZJ其中补号3种 ZH ZI ZJ第三大组(50种)PK、PL、PM、PN、PO QK、QL、QM、QN、QORK、RL、RM、RN、RO SK、SL、SM、SN、SOTK、TL、TM、TN、TO UK、UL、UM、UN、UOWK、WL、WM、WN、WO XK、XL、XM、XN、XOYK、YL、YM、YN、YO ZK、ZL、ZM、ZN、ZO其中补号3种 ZM ZN ZO第四大组(50种)其中补号2种 JN JOAK、AL、AM、AN、AO BK、BL、BM、BN、BOCK、CL、CM、CN、CO DK、DL、DM、DN、DOEK、EL、EM、EN、EO FK、FL、FM、FN、FOGK、GL、GM、GN、GO HK、HL、HM、HN、HOIK、IL、IM、IN、IO JK、JL、JM、JN、JO第五大组(50种)其中补号2种 NY NZKP、KQ、KR、KS、KT、KU、KW、KX、KY、KZ LP、LQ、LR、LS、LT、LU、LW、LX、LY、LZMP、MQ、MR、MS、MT、MU、MW、MX、MY、MZ NP、NQ、NR、NS、NT、NU、NW、NX、NY、NZOP、OQ、OR、OS、OT、OU、OW、OX、OY、OZ第六大组(95种)其中补号7种 JA ** JC JG JH JI JJAA、AB、AC、AD、AE、AF、AG、AH、AI、AJ BA、BB、BC、BD、BE、BF、BG、BH、BI —CA、CB、CC、CD、CE、CF、CG、CH、CI、CJ DA — DC、DD、DE、DF、DG、DH、DI、DJEA、EB、EC、ED —— EG、EH、EI、EJ FA、FB、FC、FD、FE、FF、FG、FH、FI、FJ GA、GB、GC、GD、GE、GF、GG、GH、GI、GJ HA、HB、HC、HD、HE、HF、HG、HH、HI、HJIA、IB、IC、ID、IE、IF、IG、IH、II、IJ JA ** JC — JE、JF、JG、JH、JI、JJ 第七大组(12种)其中补号1种 NJKA、KB、KC、KD、KE、KF、KG、KH、KI、KJ —— MC ———————————————— NJ第八大组(68种)其中补号6种 ZT ZU ZW ZX ZY ZZPP、PQ、PR、PS、PT、PU、PW、PX、PY、PZ QP、QQ、QR ———— QX、QY、QZRP、RQ、RR、RS、RT、RU、RW、RX、RY、RZ SP、—— SS — SU、SW、SX、SY —TP、TQ、TR、TS、TT、TU、TW、TX、TY、TZ US、UUWP、WQ — WS、WT、WU、WW、WX、WY ——— XR、XZYP — YR、YS ——— YX — YZ ZP、ZQ、ZR — ZT、ZU、ZW、ZX、ZY、ZZ 注:8001冠号仍在陆续发行中。
高等电磁理论第六章答案6
第六章 层状媒质中偶极子源的电磁场6-1 利用磁场边界条件,证明位于无限大理想导电平面附近的垂直电流元及磁流元的镜像关系。
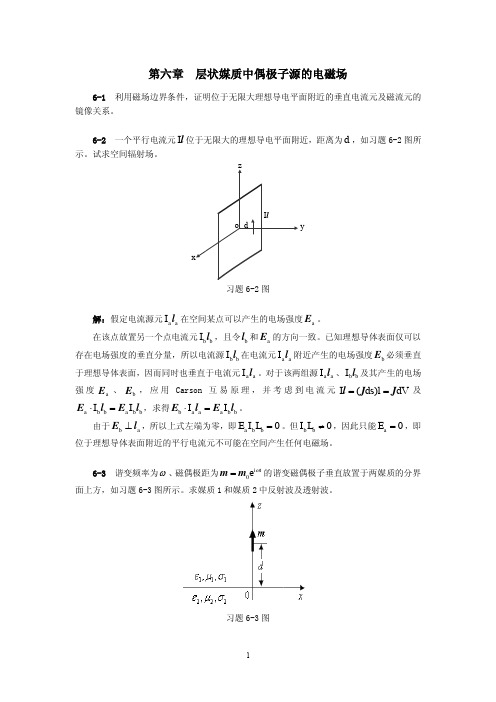
6-2 一个平行电流元I l 位于无限大的理想导电平面附近,距离为d ,如习题6-2图所示。
试求空间辐射场。
y习题6-2图解:假定电流源元a a I l 在空间某点可以产生的电场强度a E 。
在该点放置另一个点电流元b b I l ,且令b l 和a E 的方向一致。
已知理想导体表面仅可以存在电场强度的垂直分量,所以电流源b b I l 在电流元a a I l 附近产生的电场强度b E 必须垂直于理想导体表面,因而同时也垂直于电流元a a I l 。
对于该两组源a a I l 、b b I l 及其产生的电场强度a E 、b E ,应用Carson 互易原理,并考虑到电流元()I ds l dV ==l J J 及a b b a b b I I ⋅=E l E l ,求得b a a a b b I I ⋅=E l E l 。
由于b a ⊥E l ,所以上式左端为零,即0a b b E I L =。
但0b b I L ≠,因此只能0a E =,即位于理想导体表面附近的平行电流元不可能在空间产生任何电磁场。
6-3 谐变频率为ω、磁偶极距为i 0etω=m m 的谐变磁偶极子垂直放置于两媒质的分界面上方,如习题6-3图所示。
求媒质1和媒质2中反射波及透射波。
习题6-3图解:易知磁偶极子垂直于分界面,故其激发TE 波,由图形可知z m m =e ,z d =一次场的矢量位仅有z 分量且满足标量波动方程22()()()m m A k A i m x y z d ωεμδδδ∇+=-在0z d ≤≤的区域内,一次场的平面波分量为1102d zm i m A e e εεϖεμε--=则反射波和透射波的矢量位分别为1111102d z m TEi m A R e e εεϖεμε--=,2211202d zm i m A e e εεϖεμε--= 其中反射系数1212TE R ξξξξ-=+,透射系数1122TE T ξξξ=+对以上两式进行傅里叶反变换得1111()111010(,)()4z d m TE k i m A z R e J k dk ρξρρωεμρρπξ∞-+=⎰ 2()112202220(,)()4z d m TE i m k A z T e J k dk ξωεμρρρρρπξ∞-=⎰ 由公式1m m ξ=-∇⨯E A ,1m m m i i σωεεωεμ+=-+∇∇H A A 可得垂直磁偶极子的反射波电磁场分量为1111()21211120()4z d m m H e k J k dk ξρρρρξξρπξξ∞-+-=-+⎰ 11113()12101210()4z d mz k m H e J k dk ρξρρξξρπξξε∞-+-=+⎰ 11113()112111210()4z d m k i m E e J k dk ρξϕρρωμξξρπξξε∞-+-=-+⎰ 1110m m mz H E E ϕρ===透射波电磁场分量为2222()211121221202()4z d m m H e k J k dk ξρρρρεμξρπεμξξ∞-=-+⎰ 22223()111202212102()4z d mz k m H e J k dk ρξρρεμξρπεμξξε∞-=+⎰22222()11121212102()4z d m k i m E e J k dk ρξϕρρωεμξρπεξξε∞-=-+⎰2220m m mz H E E ϕρ===6-4 谐变频率为ω的电偶极子水平放置于两媒质的分界面上方,如习题6-4图所示。
ZD-02 直控盘终端器安装使用说明书
概述ZD-02直控盘终端器(以下简称终端器),主要用于重要设备的启动、停动控制。
与具有断路、短路检测功能的GST-LD-KZ08H 直控盘配合使用。
特点1. 提供一组常开触点、一组常闭触点,使直控盘与被控设备电气隔离;2. 实现启停控制、向直控盘提供反馈信号;3. 终端器本身提供对外接线,便于现场接线。
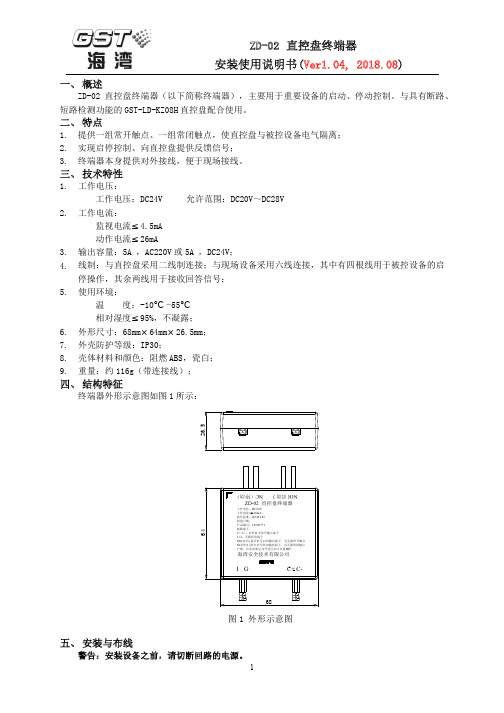
技术特性1. 工作电压:工作电压:DC24V 允许范围:DC20V~DC28V2. 工作电流:≤监视电流 4.5mA ≤动作电流26mA3. 输出容量:5A ,AC220V 或5A ,DC24V;4. 线制:与直控盘采用二线制连接;与现场设备采用六线连接,其中有四根线用于被控设备的启停操作,其余两线用于接收回答信号; 5. 使用环境:温 度:-10℃~55℃ ≤相对湿度95%,不凝露;6. 外形尺寸:68mm ×64mm ×26.5mm;7. 外壳防护等级:IP30;8. 壳体材料和颜色:阻燃ABS,瓷白; 9. 重量:约116g(带连接线);结构特征终端器外形示意图如图1所示:6864海湾安全技术有限公司I G C+ C-ZD-02 直控盘终端器工作电压:DC24V工作电流:≤26mA 执行标准:Q/GST 45制造日期:产品编号:10105771接线端子:C+, C-:启停命令信号输入端子I, G :无源回答端子NO(启动) 命令信号启动输出端子,为无源常开触点NC(停动) 命令信号停动输出端子,为无源常闭触点产地:河北省秦皇岛开发区长江东道80号N O (启动) N C (停动)26.5图1 外形示意图安装与布线1. 安装前应首先检查外壳是否完好无损,标识是否齐全。
2. 终端器采用明装方式,将终端器外接线按图2标识及接线说明和外部相应电气线缆连接。
根据现场环境将终端器固定在合适位置即可。
3. 终端器接线示意图如图2所示。
6864海湾安全技术有限公司I G C+ C-ZD-02 直控盘终端器工作电压:DC24V工作电流:≤26mA 执行标准:Q/GST 45制造日期:产品编号:10105771接线端子:C+, C-:启停命令信号输入端子I, G :无源回答端子NO(启动) 命令信号启动输出端子,为无源常开触点NC(停动) 命令信号停动输出端子,为无源常闭触点产地:河北省秦皇岛开发区长江东道80号N O (启动) NC (停动)26.5图2 接线示意图接线说明如下:C +、C-:启停命令信号输入端子;I、G:无源常开回答信号输入端子; 以上为弱电端子;NO (启动):启动命令信号输出端子,为无源常开触点; N C(停动):停动命令信号输出端子,为无源常闭触点。
ZD型阻尼弹簧减振器

ZD型阻尼弹簧减振器具有钢弹簧减振器的低频率和阻尼大的双重优点,消除钢弹簧固有的共振振幅现象。
该系列产品特点:
1、减振器弹簧材料为优质60Si2Mn弹簧钢线,耐疲劳,强度高,承载力大,使用寿命长等特点。
2、荷载范围广,便于用户选择,固有频率低,隔振效果好,并且结构紧凑,外形尺寸较小,安装更换方便,使用安全可靠。
3、对工作环境适应性强,并能在-40℃-110℃环境下正常工作,正常工作载荷范围内固有频率2HZ-5HZ,对积极隔振、消极隔振、冲击振动和固体传声的隔离均有明显的效果。
是隔离振动降低噪声、治理振动公害、保护环境的理想减振器。
ZD型系列减振器共有三种安装形式,减振器上下座面有防滑橡胶垫,对于干扰力较小的动力设备,可直接将ZD型减振器置放于设备的机座下,勿需固定;ZDⅠ型仅上座配有螺栓与设备固定;ZDⅡ上下座分别设有螺栓与地基螺栓孔,可上下固定。
用户可根据不同的需要和场合进行选择。
型号最佳载
荷(N)
预压载
荷(N)
极限载
荷(N)
竖向刚
度
(N/mm)
额定载荷
水平刚度
(N/mm)
外形尺寸(mm)
H D L1L2d R
ZD-12120901687.5 5.4607675901010 ZD-181801152189.514607675901010 ZD-2525015328812.519607675901010 ZD-404002625182216657675901010
苏州塞莱斯减振器科技有限公司南京办事处张露露137****7719。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
s3 s2 s
1
1 14
40 ( 14 K ) 14 40 K
40 40 K
要保证第一列>0, 应有 0<K<14 。
s0
K>14 时,第一列符 号改变2次 有2个 不稳定域的根
实际上 K=14 时,闭环系统极点为 -14, ±6.3246j 临界稳定
24
判断系统的相对稳定性:
例: Δ(s) s 3 14 s 2 40 s 40 K K ? 时,Δ(s)的根全部位于 s 1 垂线的左侧?
-
特征多项式 ( s ) s 1 K
∴ K>1 时闭环系统稳定。
18
但对于稳定的系统,反馈也 有可能引起闭环系统不稳定。
1 例: G1 K , G2 , H 1 3 (s 1) 则 ( s 1 )3 K 1 G1G2 H s1
R(s) E(s)
D(s)
例:图示系统输入输出稳定,但内部的u(t)发散。
R(s)
1 s1
U(s)
s1 s1
Y(s)
16
反馈控制系统稳定的充要条件
R(s)
E(s) D1(s) G1(s) H(s) G 2(s) D2(s) Y(s)
-
所有闭环传函都有相同的分母 ——1+开环传函(特征式) 闭环系统的极点为特征方程的根(特征根),即 1+G1G2H=0 的零点,所以有
虚轴对应临界稳定,工程 意义上属于不稳定
14
极点在虚轴上不满足BIBO的例:
R(s)
G(s)
Y(s)
1 1 j ① 设 G(s) , R( s ) s s s1 1 × 则 Y(s) 2 y( t ) t 0 s 1 s 极点位置 ② 设 G(s) 2 , R( s ) 2 2 j s 12 s 1 s1 × 1 s 1 则 Y(s) 2 y( t ) t sin( 1 t ) 2 2 (s 1) 2 1 0 s2 × 1
BIBO指对任意有界的输入,输出都有界
极点位置
15
关于稳定性的说明
稳定性只取决于系统极点,是系统固有的特性, 与外作用和初始状态无关。 R(s) Y(s) G(s)
当系统存在零极点对消时,若对消发生在稳定区 域,则不影响系统的稳定性;若发生在不稳定区 域,则尽管系统BIBO稳定,但内部一定不稳定。
G1(s) H(s)
Y(s)
-
G 2(s)
用MATLAB求根 a=[1 3 3 9]; roots(a)
K=8 时,闭环系统极点为 -3, ±1.7321j 临界稳定 K=12 时,闭环系统极点为 -3.2894, 0.1447±1.7321j 不稳定 K=1 时,闭环系统极点为 -2, -0.5±0.866j 稳定
12
不考虑输入 R( s ) 时,有 Y(s) c( s ) a( s )
y(t) 是否→0 取决于Y(s) 的极 点(也是系统极点)的位置
若Y ( s )有实数极点 ,则对应的 ( t )有e t 项; jω y
若Y ( s )有复数极点 j,则对应的y( t )有 e sin( t )项; 若Y ( s )有n重复数极点 j,则对应的y( t )有 t n 1e t sin( t )项; y(t) 是否→0 取决于Y(s) 极点
对于该例, 实际上有
K<8 稳定;
K≥8 不稳定
闭环系统是否稳定,关键在于控制器结构和参数的选取
19
劳斯-赫尔维茨稳定判据
• 该判据用于二阶以上的高阶系统 • 可不用求解高阶系统的特征方程就可判 断系统是否稳定 • 可以判断不稳定极点的个数 • 可以得出保证系统稳定的参数取值范围 (参数的稳定域) • 可以分析系统的相对稳定性
2
稳定性的基本概念
b b a
a
小球在a处稳定, 在b处不稳定
摆在a处稳定, 在b处不稳定。
a, b 称为系统的平衡点
3
反馈控制可使倒立摆稳定
单级倒立摆稳定控制
二级倒立摆稳定控制
4
三 级 倒 立 摆 顶 花 瓶
5
①
I
u
②
+V R F
I
F
Light source
Controller
mg
mg
①:开环控制的磁悬浮系统 ②:闭环控制的磁悬浮系统
闭环系统稳定的充要条件为 特征方程的根全部位于左半开制可以使闭环系统稳定。
1 例: G1 K , G2 , H 1 s1 s1 K 则 1 G1G2 H s1
R(s) E(s) D(s) G1(s) H(s) G 2(s) Y(s)
22
劳斯判据
系统极点全部位于左半开平面的充要条件为 特征多项式的各项系数全部 > 0 劳斯表的第一列全部 > 0 注:若不满足稳定条件,劳斯表的第一列 有负值存在,则特征方程正实部根的数目 等于第一列符号改变的次数。
例:p223 例3.14
23
判断系统参数的稳定域:
例: Δ(s) s 3 14 s 2 40 s 40 K
的实部是否<0
13
t
0
若Y ( s )有n重实数极点 ,则对应的 ( t )有t n 1e t 项; y
线性定常系统稳定的充要条件
系统极点均具有负实部,即极点全部位于左半开平 面(不含虚轴)
系统BIBO稳定的充要条件同上
说明: ①系统极点全部具有负实部时,响应的暂态分 量→0,稳态分量取决于输入,∴BIBO稳定; ②只要有实部>0的极点,则显然输出发散; ③极点在虚轴时是否满足BIBO? j 稳定 不稳定 区域 区域 0 s复平面
设 则 b( s ) G(s) , a( s ) a, b 为多项式
D(s)
R(s)
G(s)
Y(s)
b( s ) c( s ) Y(s) R( s ) a( s ) a( s )
c 为与初始值有关 的多项式 对应零输入 响应
对应零状态 响应
两部分的 极点相同
11
例:设系统的输入输出 微分方程为 d2y dy a1 a0 y Kr ( t ) 2 dt dt 进行拉氏变换得 [ s 2Y ( s ) sy ( 0 ) y( 0 )] [ a1 sY ( s ) y( 0 )] a0Y ( s ) KR( s ) K sy ( 0 ) y( 0 ) y( 0 ) Y( s ) 2 R( s ) s a 1 s a0 s 2 a 1 s a0
G 2(s)
26
练习
B3.15, (a); B3.18
27
第三章 控制系统的运动分析 Part 2
已 讲 授
1. 对自动控制系统的基本要求 2. 几种典型输入信号及响应之间的关系 3. 控制系统的暂态响应特性
4. 控制系统的稳定性 5. 控制系统的稳态误差
1
3.4
控制系统的稳定性
• 稳定性的基本概念
• 稳定性的两种常用定义
• 线性定常系统的稳定条件
• 劳斯-赫尔维茨稳定判据
对于二阶系统 Δ(s) a2 s 2 a1 s a0 , 稳定的充要条件为 ai 0 , i 0 , 1 , 2
高阶系统需要先求劳斯表,然后由劳斯表 判断稳定与否。
21
例: Δ(s) a7 s7 a6 s 6 a5 s 5 a4 s 4 a3 s 3 a2 s 2 a1 s a0
劳斯表
a5 a4
s7 s6 s
5
a7 a6
b1
a3 a2
a1 a0
s4 s3 s2 s1 s0
a6 a5 a7 a4 a a a7 a2 a a a7 a0 b2 6 3 b3 6 1 a6 a6 a6 b a a6 b2 b a a6 b3 b a a6 0 c1 1 4 c2 1 2 c3 1 0 a0 b1 b1 b1 c b b1c2 c b b1c3 d1 1 2 d2 1 3 c1 c1 d c c 0 d c c d e1 1 2 1 2 e 2 1 3 1 c3 d1 d1 e d d 1e 2 f1 1 2 e1 f e e 0 g1 1 2 1 e2 f1
20
1. 劳斯判据(Routh’s criterion)
设系统的特征多项式为 Δ(s) an s n an 1 s n 1 a1 s a0 , (a n 0 ) 对于一阶系统 Δ(s) a1 s a0 , 稳定的充要条件为 ai 0 , i 0 , 1
解: s s1 1 代入 Δ(s) 得 将
3 2
坐标平移 Δ(s1 ) ( s1 1 )3 14( s1 1 )2 40( s1 1 ) 40 K
s1 11s1 15 s1 40 K 27
jω σ -1 0
由劳斯判据可得K的稳定域为 0.675 < K < 4.8
有界输入有界输出稳定性:在任意有界输入或扰动 的作用下,若系统输出也有界,则称该系统稳定。 (简称 BIBO 稳定)
Bouded-Input-Bouded-output
10
线性定常系统的稳定条件
系统可能受到各种扰动的影响, 扰动撤消后系统能否恢复平衡状态 等价于非零初始状态和零输入作用 下的响应能否→0
不稳定 可以稳定。
6
MIT的磁悬浮反馈控制系统
7
四川省科技馆采用反馈控制的磁悬浮地球仪
8
针对不稳定对象的反馈控制 针对稳定对象的反馈控制 大部分受控对象是稳定的,但 反馈控制所构成的闭环系统可 能稳定,可能不稳定。