报告【手自动无扰切换+PID参数整定+迟延模块】(谌文澜)
PID无扰切换教程

PID无扰切换教程
在pid控制中的无扰动切换应该有两个:
1.pid输出和实际软手操器的输出
这里面PID模块的计算输出送到软手操器中然后再送到AO给现场;当为自动时,软手操的输入端接PID的输出端,pid的输出根据偏差的大小进行计算得出;当切为手动时,软手操的输出为本身模块的输出,不再接受pid的输出,而PID还是持续计算输出。
这个时候,若是软手操手动输出和PID计算的不一致时,由手动切到自动会发生扰动,这是一个问题。
解决办法:在PID的模块当中,一般有一个跟踪切换开关,可调用软手操的手自动信号,当为手动时,PID的输出跟踪软手操的输出,自动时,软手操跟踪pid的输出,这样在手自动两个状态下两个模块的输出都能保持一致,解决了这一个扰动。
第二个扰动是测量值和设定值的在手自动切换的过程中也会发生扰动,自动时测量值跟着设定值变,这没什么问题;切手动时,利用手自动的信号使得设定值跟着测量值变,一般软手操模块都具备设定值的跟踪和跟踪切换开关的管脚;这样就可以解决问题了,真正实现了无扰动切换。
///////////////////////////////////////////////////////////
Ortho xuchao Pid无扰手自动切换
自动时,软手操跟踪pid的输出。
手动时,SP值跟随PV值。
PID控制中如何整定PID参数

PID控制中如何整定PID参数1,概述作为经典的控制理论,PID控制规律仍然是当今工控行业的主导控制方式,无论复杂、简单的控制任务,PID控制都能取得满意的控制效果,前提是PID参数必须选择合适。
可以说,通过适当的PID参数,PID控制可以得到各种输出响应特性,也就是说,通过适当给定PID参数,大多数的控制任务都可以由PID完成。
本文根据经典PID控制理论,结合玖阳自动化科技公司的一线通模块,详细介绍PID参数在整个控制过程中所起的作用,指导PID控制中的参数整定。
2,PID模块介绍WT405-5为可编程PID控制模块,模块内部有40余种命令语言,每个命令语言执行一定的运算功能,根据实际要求,将多条命令语言组合在一起即构成模块的控制程序。
通过编程,模块可实现单回路PID、串级三冲量PID、导前微分PID及自动/手动无扰切换等复杂的控制功能。
模块具有掉电保护功能,复位或重新上电时能自动恢复掉电前的工作状态,接续原来的工作状态进行控制。
模块本身具有PID控制所必须的模拟量输入、模拟量输出、开关量输入、开关量输出通道,能不依赖网络而独立进行PID 控制,该控制方案安全、可靠。
PID参数、PID定值及控制程序的修改可通过网络实现。
4路模拟量输入通道可以单独设置分度类型,采集各种类型的模拟量信号。
3,PID控制原理经典PID控制理论中,基本数学模型有两种(连续型、增量型),PID模型的增量控制数学模型可以简单地用下式表示:PID参数包括:比例倍数---------表达式中的K积分时间---------表达式中的Ti(秒)实际微分时间---Td(秒)微分增益---------表达式中的Kd积分分离---------当PID偏差E(k)超过“积分分离”值时,PID命令不进行积分项运算,防止积分饱和。
当积分分离为0时,PID命令变成了PD命令,不进行积分运算。
上限限制-------用来限制PID命令输出的最大值,即PID输出不能大于该值。
pid 无扰动切换 原理

pid 无扰动切换原理
PID无扰动切换的原理是:
1. 在传统的PID控制算法的基础上,引入额外的逻辑和参数,以实现在控制器切换时的平滑过渡,减少切换过程中的干扰和振荡。
2. 该算法的核心思想是利用两个PID控制器,分别为当前控制器和目标控制器。
当前控制器负责实际的控制任务,而目标控制器负责预测未来的控制需求。
在切换控制器时,通过逐步调整两个控制器的权重,实现平滑过渡,从而避免剧烈的控制器切换导致的系统干扰。
3. 在自动与手动方式相互切换过程中,应做到无扰切换。
即在切换的瞬间,应当保持控制器的输出不变,这样使执行器的位置不会在切换过程中突然变化,就不会对生产过程引入附加的扰动。
4. 要实现无扰切换,控制器应有跟踪措施。
即自动运行时,手动值跟踪PID 输出,达到自动切换到手动时无扰动;当手动运行时,SP给定值跟踪PV测量值,所以PID运算输出增量为0,当从手动切换到自动的时候能实现无扰动切换。
以上内容仅供参考,如需更多信息,建议查阅相关文献或咨询专业人士。
自动控制系统中的PID参数调整技巧与经验总结
自动控制系统中的PID参数调整技巧与经验总结自动控制系统的PID(比例-积分-微分)控制器是一种广泛应用的控制算法,其用于控制和调节各种工业过程和设备。
PID控制器的性能取决于其参数的选择合理与否。
因此,PID参数的调整是实现稳定和高效控制的关键。
在进行PID参数调整之前,我们首先需要了解PID控制器的工作原理和参数含义。
比例参数(P)根据偏差值与设定值之间的线性关系来调整输出;积分参数(I)消除偏差的累积误差;微分参数(D)根据偏差的变化率调整输出。
合理的PID参数能够使得系统的响应速度和稳定性达到最佳状态。
在进行PID参数调整时,我们可以采用以下几种经验总结和调整技巧:1. 根据系统特性选择合适的控制方式:在PID控制器中,根据系统的特性和要求,可以选择不同的控制方式,如位置式PID控制、增量式PID控制等。
根据具体需求选择合适的控制方式能够提高控制性能。
2. 初始参数设置:初始参数的设置是PID参数调整的重要一步。
可以根据经验设置初始参数值,例如,P参数设置为比较小的值,I参数设置为0,D参数设置为0,然后逐步进行调整。
3. 建立适当的数学模型:在进行PID参数调整前,我们需要建立适当的数学模型来描述被控对象的动态特性。
这有助于我们了解系统的传递函数、阶数和稳定性等特征,从而为参数调整提供参考。
4. 手动调整PID参数:通过观察响应曲线,我们可以手动调整PID参数。
首先,增大P参数的值,观察系统的反应速度和稳定性。
然后,增加I参数的值,观察系统的静态精度和偏差消除能力。
最后,增加D参数的值,观察系统的阻尼特性和抗干扰能力。
在调整过程中,根据系统的性能指标,逐步优化PID参数。
5. 使用自动调节方法:除了手动调整PID参数外,我们还可以使用自动调节方法,如Ziegler-Nichols方法和Chien-Hrones-Reswick方法等。
这些方法通过对系统的开环响应曲线进行分析,自动计算出合适的PID参数。
17改进PID及PID参数整定

17改进PID及PID参数整定PID控制是一种经典的控制器设计方法,用于实现系统的稳定控制。
然而,传统的PID控制器也存在一些问题,比如参数整定时需要较多的经验和试错过程,容易出现超调或震荡现象。
为了解决这些问题,需要改进PID控制器的设计和参数整定方法。
一种改进PID控制器的方法是采用自适应PID控制算法。
自适应PID控制算法能够根据系统的反馈信号自动调整PID参数,从而提高控制的性能。
常用的自适应PID控制算法有自适应模型预测控制(MPC)、自适应波前控制(ABC)等。
这些算法能够根据系统的动态特性自动更新PID参数,从而使控制器能更好地适应系统变化。
另一种改进PID控制器的方法是采用反馈线性化技术。
反馈线性化技术利用系统的非线性特性进行线性化处理,从而设计出更有效的控制器。
常用的反馈线性化技术有反馈线性化控制(FLC)、反馈线性化延时控制(DLC)等。
这些技术能够将非线性系统转化为线性系统,并基于线性模型进行控制。
除了改进控制器的设计方法,还可以采用先进的参数整定方法来优化PID控制器的性能。
传统的参数整定方法有经验法、试错法等,但这些方法需要大量的试探和经验。
现代的参数整定方法可以根据系统的数学模型和反馈信号进行自动参数整定。
常用的参数整定方法有粒子群算法、遗传算法、模型优化算法等。
这些方法能够根据系统的特性自动最优的PID参数组合,从而提高控制器的性能。
除了上述的改进方法,还有一些其他的改进技术,比如模糊PID控制、神经网络PID控制等。
这些技术利用模糊逻辑和神经网络等智能化方法来改进PID控制器的设计和参数整定。
这些技术能够更好地适应系统的动态特性和非线性特性,从而提高控制器的性能和稳定性。
综上所述,改进PID控制器的设计和参数整定方法非常重要,可以提高控制系统的性能和稳定性。
通过采用自适应控制算法、反馈线性化技术、先进的参数整定方法以及其他智能化技术,可以更好地适应系统的变化,提高控制的效果。
PID参数设置范文
PID参数设置范文PID是一种常用的控制算法,它在工业自动化中被广泛应用于控制系统。
PID是比例(P)、积分(I)和微分(D)三个参数的缩写,通过调节这三个参数的值,可以使控制系统更加稳定和准确。
P参数是比例参数,它进一步调整输出信号与误差之间的关系。
比例参数越大,输出信号与误差之间的线性关系越强。
P参数的增大可以使控制系统对于误差的响应更快,但如果过大可能会引起系统的振荡。
I参数是积分参数,它对误差的积分并累计,以消除系统的静态误差。
积分参数可以使系统更加准确,但如果设置得过大,可能会导致系统的响应速度变慢,甚至引起系统的不稳定。
D参数是微分参数,它通过预测误差的变化趋势来调整输出信号的变化速度。
微分参数可以使系统更加稳定,减小振荡,但如果设置得过大,可能会引起系统的过度补偿,影响系统的响应速度。
在实际应用中,为了获得最佳的控制效果,需要对PID参数进行合理的设置。
一般来说,首先可以尝试进行手动调节,调整P参数,使系统的响应速度达到要求。
然后,逐步增加I参数,以减小静态误差。
最后,再逐步增加D参数,以提高系统的稳定性。
然而,手动调节PID参数需要经验和耐心,并且不一定能够得到最佳参数。
为了更加准确地设置PID参数,可以采用自动调参的方法。
自动调参方法有很多种,比如遗传算法、模糊控制、神经网络等。
这些方法可以通过对系统的建模和优化算法的运算,自动获得最佳的PID参数。
在总结上述内容之前,需要强调的是,PID参数设置是一个相对较为复杂的过程,需要考虑到系统的性能要求和实际应用中的各种因素。
因此,在实际应用中,可以根据需要选择手动调节或者自动调参的方法,并根据实际情况进行合理的PID参数设置,以获得最佳的控制效果。
PID控制器及PID参数整定

PID控制器及PID参数整定PID控制器(Proportional-Integral-Derivative Controller)是一种常用的控制器,在工业自动化系统中广泛应用。
PID控制器的基本原理是根据被控对象的反馈信号与设定值之间的偏差,通过一定的算法和参数调节输出信号,以使被控对象的输出尽可能接近设定值。
比例控制部分通过按比例增大或减小输出信号,以消除偏差。
比例增大时,输出信号变化速度快,但容易产生超调;比例减小时,输出信号变化速度慢,但容易产生稳态误差。
积分控制部分通过累积偏差的总和,使输出信号随时间逐渐增大或减小。
积分控制可消除稳态误差,但增加系统的响应时间和抗干扰能力,如果积分时间过长会导致系统不稳定。
微分控制部分根据偏差的变化率调整输出信号,用于抑制超调和稳定系统。
微分控制对快速变化的偏差具有较好的调节效果,但会增加系统对噪声的敏感性。
PID参数整定是指确定PID控制器的比例系数、积分时间和微分时间等参数的过程,目的是使控制器具有良好的稳态和动态性能。
常用的PID参数整定方法有经验法、试探法、频域法、遗传算法和自整定法等。
经验法基于经验公式确定PID参数,适用于简单的控制系统。
例如,比例系数可由反馈增益除以传递函数极点;积分时间和微分时间可根据系统的响应速度和稳定时间通过试错法确定。
试探法是通过试探不同的PID参数组合,并根据系统的响应性能进行调整。
常用的试探法有Ziegler–Nichols法和相位裕度法。
频域法利用频率响应的特性来确定PID参数。
常用的频域法有Nyquist曲线法、Bode图法和根轨迹法。
遗传算法是通过模拟生物进化过程确定PID参数,适用于复杂的非线性系统。
自整定法是利用现代控制理论和技术进行PID参数整定。
例如,自整定法可以利用系统的数学模型进行参数估计,并根据指定的性能指标进行参数调整,实现自动调节。
综上所述,PID控制器是一种常用的控制器,通过调整比例、积分和微分参数,实现对被控对象的精确控制。
一种改进的最优PID参数自整定控制方法
间乘绝对误差的积分准则或时间平方加权的误差平方 积分(ISTTE)准则。由Zhuang和Atherton提出的最 优PID控制器参数整定经验公式‘6|:
K,=瓦al(计
下~.~
!
口2+b2(r/T)
R~T(计
式中:r为系统滞后时间;T为系统时间常数。
对不同的r/T范围,最优PID控制器参数(口,6)可
。的运行效率。
图7对象参数改变时改进的PID控制器作用下的响应曲线 3结语
通过仿真研究改进的最优PID参数自整定控制方 法的基本控制特性、系统的抗干扰特性和鲁棒特性,并 与前述的最优PID控制方法进行了性能比较。可以看 出,对于大滞后、大时变的非线性控制对象,采用改进的 最优PID参数自整定控制方法,其稳定性能好,动态调 节过程快,有较强的抗干扰能力,能够有效地抑制系统 的超调量,缩短调节时间,可以提高工业过程设备的运 行效率,从而实现节能降耗的目的。
2.College of Information and Control Engineering,China University of Petroleum,Dongying 257061,China)
Abstract:In order tO solve the difficulty control problem of big lagging systems,an optimal PID parameter self-adjusting control method with embedded function is designed.The control method aims at the systems with nonlinear,large time- varying and time delay.The improved control method is compared with the optimal PID parameter self-adj usting control meth— ods which conforms to ISTTE optimal standard by a simulation experiment.The simulation wave patterns and analysis are given.The experiment results indicate that the improved control method possess a lot of advantages such as the properties of high-accuracy,high—stability and high—robust.The control method can shorten the sdj usting time of the system and restrain 0- vershoot effectively,and improve the control effect of the big lagging system.
PID参数整定
其中umax、umin与 ymax、ymin为输入输出的量程上下限; 若巳归一化,则 umax- umin =1, ymax- ymin =1。
• τ (纯滞后时间)
“非自衡对象”控制系统分析
Lsp(s) + u(s) Kc
Kp s
L(s)
e -s
问题:对于上述 “非自衡液位对象”,通常采用纯比 例调节器对其进行控制。试分析上述控制系统的临界 稳定条件。
ë
i
1 t de (t ) ù PID : u (t ) K c é êe(t ) 0 e( )d Td ú u0 T dt û
é ù U (s) 1 K c ê1 Td s ú E ( s) ë Ti s û
PID参数对控制性能的影响
Kc 对过渡过程的影响
增益 Kc 的增大,使系统的调节作用增强,但稳定性下 降(当系统稳定时,调节频率提高、最大偏差下降);
PID控制器的参数整定
戴连奎 浙江大学智能系统与决策研究所
2001/08/18
常用的工业PID控制器
P: PI :
u(t ) Kc e(t ) u0
U (s) Kc E (s)
é ù 1 t u (t ) K c êe(t ) e( )d ú u0 Ti 0 ë û é U ( s) 1 ù K c ê1 ú E ( s) ë Ti s û
单回路系统PID参数整定举例
相应仿真结果参见SimuLink 演示程序 (D:\DLK\ControlEng\PIDControl\SinglePID.mdl)
非自衡对象的阶跃响应
y(t)
τ
y(t)
LC
t
u(t)
PID的无干扰切换
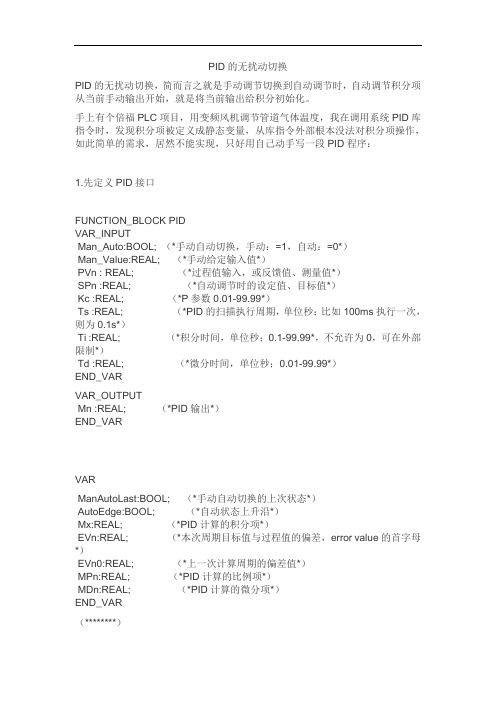
PID的无扰动切换PID的无扰动切换,简而言之就是手动调节切换到自动调节时,自动调节积分项从当前手动输出开始,就是将当前输出给积分初始化。
手上有个倍福PLC项目,用变频风机调节管道气体温度,我在调用系统PID库指令时,发现积分项被定义成静态变量,从库指令外部根本没法对积分项操作,如此简单的需求,居然不能实现,只好用自己动手写一段PID程序:1.先定义PID接口FUNCTION_BLOCK PIDVAR_INPUTMan_Auto:BOOL; (*手动自动切换,手动:=1,自动:=0*)Man_Value:REAL; (*手动给定输入值*)PVn : REAL; (*过程值输入,或反馈值、测量值*)SPn :REAL; (*自动调节时的设定值、目标值*)Kc :REAL; (*P参数0.01-99.99*)Ts :REAL; (*PID的扫描执行周期,单位秒;比如100ms执行一次,则为0.1s*)Ti :REAL; (*积分时间,单位秒;0.1-99.99*,不允许为0,可在外部限制*)Td :REAL; (*微分时间,单位秒;0.01-99.99*)END_VARVAR_OUTPUTMn :REAL; (*PID输出*)END_VARVARManAutoLast:BOOL; (*手动自动切换的上次状态*)AutoEdge:BOOL; (*自动状态上升沿*)Mx:REAL; (*PID计算的积分项*)EVn:REAL; (*本次周期目标值与过程值的偏差,error value的首字母*)EVn0:REAL; (*上一次计算周期的偏差值*)MPn:REAL; (*PID计算的比例项*)MDn:REAL; (*PID计算的微分项*)END_VAR(********)2.PID程序:AutoEdge:= ManAutoLast AND (NOT Man_Auto ); (***手动转自动上升沿**) ManAutoLast:=Man_Auto;IF AutoEdge THENMx:= LIMIT(20.0,Man_Value,60.0); (*自动调节时,积分初始化*)END_IFIF Man_Auto THENMn:= LIMIT(20.0,Man_Value, 60.0); (*手动调节时给定值*)ELSEEVn:=(SPn - PVn ) ; (*自动调节PID计算*)MPn := LIMIT(-60.0,(Kc * EVn),60.0) ; (*设置比例项的边界*)IF Mn>0.0 AND Mn<100.0 THEN (*为防止积分饱和,设置冻结积分计算的条件*)Mx:=LIMIT(18.0,( Kc*Ts/Ti*EVn+Mx), 100.0); (*积分项计算公式,并设置边界*)END_IFMDn := Kc * Td / Ts * (EVn - EVn0);Mn:=LIMIT(18.0,(MPn+Mx+MDn),60.0); (*PID计算:= 比例项+积分项+微分项;积分项是主干*)EVn0:=EVn;END_IF。
Unity Pro编程中PID调节及无扰切换浅析
Unity Pro编程中PID调节及无扰切换浅析作者:潘宁吴琼来源:《科技创新导报》2020年第25期摘要:本文介绍了自动控制中PID的含义,它在工业调节应用中广泛的使用。
它的结构简单、稳定程度好、工作性能可靠,在线较容易调整,并且介绍了PID手自动无扰切换的重要性及实现的基本原理。
举例说明了施耐德品牌产品Unity Pro编程中PID及其自动和手动模式相互跟踪的实现机制,并通过风机应用实例实现了较好的调节性能及无扰切换。
关键词:PID 无扰动切换模式 Unity Pro中图分类号:TL421 文献标识码:A 文章编号:1674-098X(2020)09(a)-0001-03Abstract: This paper introduces the meaning of PID in automatic control, which is widely used in industrial regulation. It has the advantages of simple structure, good stability, reliable performance, easy adjustment online, and introduces the importance and basic principle of automatic undisturbed switch of PID hand. An example is given to illustrate the realization mechanism of PID and its automatic and manual mode mutual tracking in the programming of Schneider brand Unity Pro. A fan application example is used to realize better adjustment performance and trouserless switching.Key Words: PID; Undisturbed switching; Pattern; Unity Pro1 PID简介随着社会经济发展和科技进步,工业产品以可编程控制器作为自动化控制的核心,进一步推进了对产品品质和工艺过程的要求。
PID指令及自整定系统总结
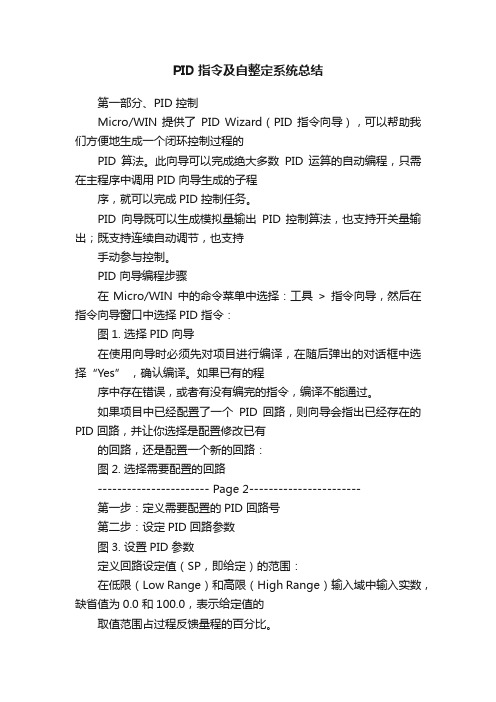
PID指令及自整定系统总结第一部分、PID 控制Micro/WIN 提供了PID Wizard(PID 指令向导),可以帮助我们方便地生成一个闭环控制过程的PID 算法。
此向导可以完成绝大多数PID 运算的自动编程,只需在主程序中调用PID 向导生成的子程序,就可以完成PID 控制任务。
PID 向导既可以生成模拟量输出PID 控制算法,也支持开关量输出;既支持连续自动调节,也支持手动参与控制。
PID 向导编程步骤在Micro/WIN 中的命令菜单中选择:工具> 指令向导,然后在指令向导窗口中选择PID 指令:图1. 选择PID 向导在使用向导时必须先对项目进行编译,在随后弹出的对话框中选择“Yes” ,确认编译。
如果已有的程序中存在错误,或者有没有编完的指令,编译不能通过。
如果项目中已经配置了一个PID 回路,则向导会指出已经存在的PID 回路,并让你选择是配置修改已有的回路,还是配置一个新的回路:图2. 选择需要配置的回路----------------------- Page 2-----------------------第一步:定义需要配置的PID 回路号第二步:设定PID 回路参数图3. 设置PID 参数定义回路设定值(SP,即给定)的范围:在低限(Low Range)和高限(High Range)输入域中输入实数,缺省值为0.0 和100.0,表示给定值的取值范围占过程反馈量程的百分比。
这个范围是给定值的取值范围。
它也可以用实际的工程单位数值表示,接下来会和过程输入量一起总结。
比例增益:即比例常数。
积分时间:如果不想要积分作用,可以把积分时间设为无穷大:9999.99微分时间:如果不想要微分回路,可以把微分时间设为0 。
采样时间:是PID 控制回路对反馈采样和重新计算输出值的时间间隔。
在向导完成后,若想要修改此数,则必须返回向导中修改,不可在程序中或状态表中修改。
----------------------- Page 3-----------------------第三步:设定回路输入输出值图4. 设定PID 输入输出参数标定:指定输入类型单极性:即输入的信号为正,如0-10V 或0-20mA 等双极性:输入信号在从负到正的范围内变化。
基于自适应模糊PID控制的水轮机调节系统
基于自适应模糊PID控制的水轮机调节系统万瑞文;周倩倩【摘要】针对水轮机的大惯性和"水锤"效应,以及水轮机调节系统各环节的时变非线性特性,传统的PID控制很难改善其控制品质,容易产生超调量大、摆动时间长、波动频繁以及调节"迟钝"等现象. 为此,在水轮机调节系统中引入了有功功率反馈来取代主接力器位移反馈,同时设计了一个基于模糊控制的变参数PID控制器,利用模糊控制的专家推理能力实现在线调整PID参数,来改善系统控制品质. 而且还结合水轮机调节系统变工况和扰动情况,利用模糊逻辑工具箱对自适应模糊PID控制模型进行仿真. 结果表明,该系统具有更好的跟随性能,稳态精度高,超调量明显较小,具有较强的自适应性和鲁棒性能.【期刊名称】《人民长江》【年(卷),期】2016(047)004【总页数】5页(P79-83)【关键词】有功功率;模糊控制;自适应PID;水轮机【作者】万瑞文;周倩倩【作者单位】大连大学信息工程学院,辽宁大连116000;武汉科技大学信息科学与工程学院,湖北武汉430081【正文语种】中文【中图分类】TV734.1水轮发电机组调节系统以水轮机作为调节装置,该系统将水轮发电机组作为被控对象[1-6],是一个高度非线性、时变不确定、具有死区、时滞、非最小相位的高阶闭环控制系统[7-11],水轮机组的调速起着维持电力系统的负荷平衡、保持电网稳定(调峰和调频)的作用,因此水轮机调速系统是整个水电站的中心枢纽,其性能的好坏直接影响到水电站能否安全高效地运行。
水轮机调速器按照其发展历程可以分为机械液压型调速器、电气液压型调速器和微机调速器。
随着智能控制技术、电力电子技术和计算机技术的发展,微机控制技术在水轮机调节方面的应用已经是大势所趋,遗传算法、模糊逻辑、神经网络等智能调速控制的算法较为流行。
本文着重介绍一种新型的自适应模糊PID智能控制器及其应用,虽然传统的PID控制方法简单并能够满足大多数工业控制,但是对电力系统中的水轮机调节系统来说,大容量机组和大型互联电力系统的出现及其对电力系统自动控制要求的提高,对其控制品质提出了更高的要求。
PID控制中如何整定PID参数
PID掌握中若何整定PID参数1,概述作为经典的掌握理论,PID掌握纪律仍然是当今工控行业的主导掌握方法,无论庞杂.简略的掌握义务,PID掌握都能取得知足的掌握后果,前提是PID参数必须选择适合.可以说,经由过程恰当的PID参数,PID掌握可以得到各类输出响应特征,也就是说,经由过程恰当给定PID参数,大多半的掌握义务都可以由PID完成.本文依据经典PID掌握理论,联合玖阳主动化科技公司的一线通模块,具体介绍PID参数在全部掌握进程中所起的感化,指点PID掌握中的参数整定.2,PID模块介绍WT405-5为可编程PID掌握模块,模块内部有40余种敕令说话,每个敕令说话履行必定的运算功效,依据现实请求,将多条敕令说话组合在一路即组成模块的掌握程序.经由过程编程,模块可实现单回路PID.串级三冲量PID.导前微分PID及主动/手动无扰切换等庞杂的掌握功效.模块具有失落电呵护功效,复位或从新上电时能主动恢复失落电前的工作状况,接续本来的工作状况进行掌握.模块本身具有PID掌握所必须的模仿量输入.模仿量输出.开关量输入.开关量输出通道,能不依附收集而自力进行PID掌握,该掌握计划安然.靠得住.PID参数.PID定值及掌握程序的修正可经由过程收集实现.4路模仿量输入通道可以单独设置分度类型,收集各类类型的模仿量旌旗灯号.3,PID掌握道理经典PID掌握理论中,根本数学模子有两种(持续型.增量型),PID模子的增量掌握数学模子可以简略地用下式暗示:PID参数包含:比例倍数---------表达式中的K积分时光---------表达式中的Ti(秒)现实微分时光---Td(秒)微分增益---------表达式中的Kd积分分别---------当PID误差E(k)超出“积分分别”值时,PID敕令不进行积分项运算,防止积分饱和.当积分分别为0时,PID敕令变成了PD 敕令,不进行积分运算.上限限制-------用来限制PID敕令输出的最大值,即PID输出不克不及大于该值.下限限制-------用来限制PID敕令输出的最小值,即PID输出不克不及小于该值.用K=0来封闭PID敕令的比例项,用“积分分别”=0来封闭PID敕令的积分项,用Kd=0来封闭PID敕令的微分项.经由过程封闭不合的功效实现P.PI.PD.PID等掌握功效.4,PID参数对输出响应的感化下面以PID输入E(k)的阶跃变更,描写K.Ti.Td.Kd参数在PID运算中的感化,恰当地修正各参数的数值,可以获得不合的掌握特征,知足不合的掌握请求,从而完成PID参数的整定.PID参数对输入误差阶跃变更的响应特征从上图中可以清晰看到PID参数在掌握进程中所起的感化,经由过程现实掌握后果,可以给定适合的PID参数,达到知足的掌握后果.参考材料:WT405-5一线通模块应用解释.。
无扰动切换的实现

3.2.输出管脚
序号
参数
数据类型 数值范围 缺省
说明
1
LMN
REAL
2
LMN_PER
WORD
MANIPULATED VALUE(受控数值)有效的受控数值被以浮点数格式 0.0 输出在“受控数值”输出端上。
W#16 #0000
MANIPULATEDVALUE PERIPHERY(受控数值外围设备)I/O 格式的受控 数值被连接到“受控数值外围设备”输出端上的控制器。
21
PV_FAC
REAL
PROCESS VARIABLE FACTOR(过程变量系数)“过程变量系数”输入 1.0
端用于和过程变量相乘。该输入端可以用于匹配过程变量范围。
22
PV_OFF
REAL
PROCESSVARIABLE OFFSET(过程变量偏移量)“过程变量偏移”输入 0.0
端可以添加到“过程变量”。该输入端可以用于匹配过程变量的范围。
必须连接到外围设备,并且输入“ PROCESS VARIABLE PERIPHERY ON”必须置位。
3.SP_INT:INTERNALSETPOINT(内部设定点)“内部设定点”输入端用于确定设定值。
4. PV_IN REAL:PROCESSVARIABLE IN(过程变量输入)可以设置一个初始值到“过程变量输入”输入端或者连接
DEAD BAND WIDTH(死区宽度)死区用于存储错误。“死区宽度”输
REAL
0.0
物理值 1
入端确定了死区的容量大小。
LMN_LLM 至
MANIPULATED ALUE HIGH LIMIT( 受控数值的上限)受控数值必须
19 LMN_HLM
PID控制器的参数整定(经验总结)
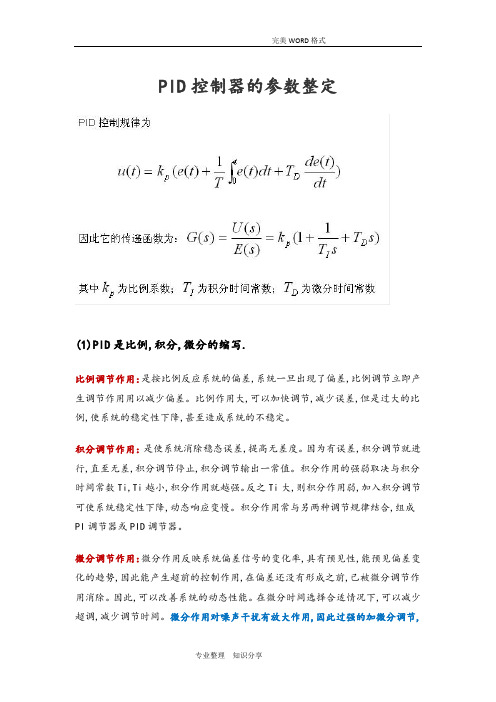
PID控制器的参数整定(1)PID是比例,积分,微分的缩写.比例调节作用:是按比例反应系统的偏差,系统一旦出现了偏差,比例调节立即产生调节作用用以减少偏差。
比例作用大,可以加快调节,减少误差,但是过大的比例,使系统的稳定性下降,甚至造成系统的不稳定。
积分调节作用:是使系统消除稳态误差,提高无差度。
因为有误差,积分调节就进行,直至无差,积分调节停止,积分调节输出一常值。
积分作用的强弱取决与积分时间常数Ti,Ti越小,积分作用就越强。
反之Ti大,则积分作用弱,加入积分调节可使系统稳定性下降,动态响应变慢。
积分作用常与另两种调节规律结合,组成PI调节器或PID调节器。
微分调节作用:微分作用反映系统偏差信号的变化率,具有预见性,能预见偏差变化的趋势,因此能产生超前的控制作用,在偏差还没有形成之前,已被微分调节作用消除。
因此,可以改善系统的动态性能。
在微分时间选择合适情况下,可以减少超调,减少调节时间。
微分作用对噪声干扰有放大作用,因此过强的加微分调节,对系统抗干扰不利。
此外,微分反应的是变化率,而当输入没有变化时,微分作用输出为零。
微分作用不能单独使用,需要与另外两种调节规律相结合,组成PD或PID控制器。
(2) PID具体调节方法①方法一确定控制器参数数字PID控制器控制参数的选择,可按连续-时间PID参数整定方法进行。
在选择数字PID参数之前,首先应该确定控制器结构。
对允许有静差(或稳态误差)的系统,可以适当选择P或PD控制器,使稳态误差在允许的范围内。
对必须消除稳态误差的系统,应选择包含积分控制的PI或PID控制器。
一般来说,PI、PID和P控制器应用较多。
对于有滞后的对象,往往都加入微分控制。
选择参数控制器结构确定后,即可开始选择参数。
参数的选择,要根据受控对象的具体特性和对控制系统的性能要求进行。
工程上,一般要求整个闭环系统是稳定的,对给定量的变化能迅速响应并平滑跟踪,超调量小;在不同干扰作用下,能保证被控量在给定值;当环境参数发生变化时,整个系统能保持稳定,等等。
PID控制器参数整定

PID控制器参数整定
韩松楠
【期刊名称】《科技风》
【年(卷),期】2010(000)020
【摘要】PID控制是工业实践中应用最广泛的控制方法之一.本文介绍了几种工业控制中常见的PID控制器参数整定的方法.
【总页数】1页(P223)
【作者】韩松楠
【作者单位】红塔辽宁烟草有限责任公司营口卷烟厂,辽宁营口,115000
【正文语种】中文
【相关文献】
1.基于遗传算法对PID控制器参数的整定 [J], 高成;庞家腾
2.基于遗传算法对PID控制器参数的整定 [J], 高成;庞家腾;
3.PID控制器参数整定复杂性的分析 [J], 严刚峰
4.基于正交试验法整定主动悬架PID控制器参数 [J], 张裕晨;高坤明;路艳玲;郭宗和;马驰骋
5.基于D分解的分数阶PID控制器的图形化参数整定 [J], 陈思溢;牛旭
因版权原因,仅展示原文概要,查看原文内容请购买。
宇电pid参数整定

宇电pid参数整定宇电PID参数整定一、引言PID控制器是工业自动化中常用的一种控制器。
通过对PID参数的整定,可以使系统的控制效果达到最佳状态。
本文将以宇电PID参数整定为主题,对PID控制器的参数整定方法进行详细介绍。
二、PID控制器的基本原理PID控制器是由比例控制器(P)、积分控制器(I)和微分控制器(D)组成的。
比例控制器根据当前偏差的大小进行控制;积分控制器根据过去一段时间内的累积偏差进行控制;微分控制器根据当前偏差变化的速度进行控制。
PID控制器的输出是三个控制器输出的加权和。
三、PID参数整定的方法1. 经验调整法经验调整法是一种简单直观的方法,根据经验将PID参数进行调整。
这种方法适用于那些对系统没有深入了解的情况下,可以通过试错的方法找到比较合适的参数。
但是这种方法存在的问题是,经验参数很难适应不同的系统。
2. Ziegler-Nichols方法Ziegler-Nichols方法是一种经典的PID参数整定方法。
它通过观察系统的响应曲线来确定参数。
具体步骤如下:(1)将比例增益(Kp)设为0,逐渐增加,直到系统出现持续振荡的情况。
(2)测量振荡的周期(T),根据周期可以计算出临界增益(Kc)。
(3)根据临界增益可以计算出比例增益(Kp)、积分时间(Ti)和微分时间(Td)的值。
3. 贝叶斯优化方法贝叶斯优化方法是一种基于贝叶斯理论的参数整定方法。
它通过建立系统的数学模型,根据实际观测数据对模型进行更新和校正,从而得到最优的参数。
这种方法可以充分利用历史数据,适应不同的系统,并且可以自动调整参数,提高系统的控制效果。
四、PID参数整定中的注意事项1. 参数整定过程中要注意系统的稳定性,过大或过小的参数都可能导致系统不稳定。
2. 参数整定应该根据实际需求进行,不同的系统对参数的要求可能不同。
3. 参数整定可以通过模拟仿真来进行,减少对实际系统的干扰。
五、总结PID参数整定是工业自动化中非常重要的一部分。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1.手自动及无扰切换
本设计中,通过扫描计算机按键来控制自动状态与手动状态的切换及量值的增减。
这里的手动,实际上是由计算机实现的“软手动”
1)自动状态
当扫描到按键“A”时,系统切换为自动状态,由PID控制器计算偏差输出控制量。
自动状态下,可通过“U”“D”两个按键分别实现设定值sp的加和减。
由于算法本身对控制量有保持作用,可实现自动至手动的无扰切换。
2)手动状态
当扫描到按键“M”时,系统切换为手动状态,此时PID控制器不工作,由手操器直接改变控制量的加减,输出给对象。
手动状态下,可通过“U”“D”两个按键分别实现控制量u2的加和减。
要实现手动的自动的无扰切换,需要使u(k)=0,即应使e(k-1), e(k-2)和u(k-1)=0
等历史状态清零,同时使切换时偏差e(k)=0。
故在手动状态下,让主调的sp跟踪
pv,同时让副调的输入量u1跟踪反馈量x1,此时切换可实现无扰。
2.PID参数整定
根据对象特性,,初始PID参数为Ti=n*T,Td=(1/3~1/8)Ti。
设初始PID参数为:
PID1: Kp1=0.8, Ti1=10.0, Td1=3.3, Tf=6.0
PID2: Kp2=0.5, Ti2=1.0, Td1=0.3, Tf=1.0
发现前期控制量太小,控制作用太弱,后期控制量大,使超调量较大。
故适当增大微分作用,减小积分作用,使系统受到阶跃扰动时,前期快速动作,同时可以减少超调量。
最终参数为:
3.纯迟延模块
传入参数:输入值、迟延时间、采样时间
迟延周期数等于迟延时间除以采样时间。
将输入值存入一个队列,每个周期将历史值右移,固定周期后输出。
此时输出值是数周期前的输入值,从而达到纯迟延的效果。