EtherCAT网络数据采集系统的设计与实现
Ethercat通讯设计
针对于高性能伺服控制系统在控制现场需要多个伺服电机并联,组网困难,实时性要求高等
特点,引入实时以太网Ethercat技术。
基于Ethercat的驱动器系统采用主从式结构,该系统
由一个Ethercat主站和若干个从站,主站和从站之间通过Ethercat进行连接通讯。
针对实际
需求,本系统采用ET1100芯片作为从站控制器,通过RJ45接口连接Ethercat网络,从站控
制器ET1100和DSP之间采用SPI通讯进行数据交互。
设计的从站Ethercat模块,接线简单,协议开发性好、I/O响应速度快,系统软硬件集成度高。
最后通过仿真和实验的验证,满足
系统要求。
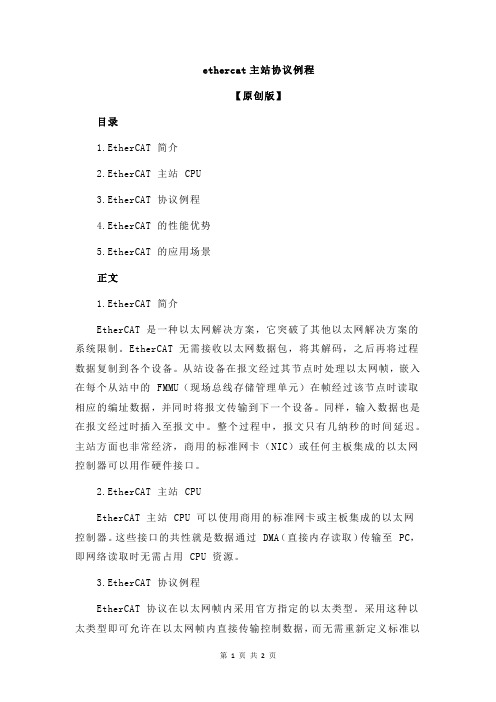
Ethercat从站硬件结构图如所示,DSP和ET1100通过SPI交换数据,DSP向EEPROM写入配置数据,以太网接口1和2分别用于接收主站上行电报和发送下行电报。
基于FPGA的EtherCAT从站设计

基于FPGA的EtherCAT从站设计EtherCAT(Ethernet for Control Automation Technology)是一种高性能、实时性强的工业以太网通信协议。
FPGA(Field-Programmable Gate Array)是一种可编程逻辑器件,具有灵活性和高性能的特点。
将这两种技术结合,可以实现,提供高效的工业自动化通信解决方案。
在中,首先需要了解EtherCAT的工作原理。
EtherCAT采用主从结构,主站负责发送指令,从站负责接收指令并执行。
EtherCAT从站通过FPGA实现,FPGA可以根据具体的应用需求进行编程,实现灵活而高效的通信功能。
基于FPGA的EtherCAT从站设计的关键是实现EtherCAT协议的通信功能。
首先需要实现EtherCAT从站的硬件接口,包括以太网接口、通信接口等。
然后,通过FPGA的编程实现EtherCAT协议的数据解析和处理,将接收到的指令解析为相应的控制信号。
同时,将执行结果通过FPGA转换成EtherCAT协议的数据格式,发送给主站。
这样,就实现了基于FPGA的EtherCAT从站的通信功能。
基于FPGA的EtherCAT从站设计具有一些优势。
首先,FPGA具有较高的灵活性,可以根据具体需求进行编程,实现功能定制化。
其次,FPGA具有较高的计算能力和处理速度,可以实现实时性要求较高的工业自动化应用。
此外,FPGA的可编程性使得系统升级和扩展更加方便。
基于FPGA的EtherCAT从站设计也存在一些挑战。
首先,FPGA的设计和编程较为复杂,需要掌握相应的技术和工具。
其次,FPGA的硬件资源有限,需要在设计中合理利用资源,以满足系统的性能要求。
此外,FPGA的开发成本较高,需要投入较多的人力和物力。
总之,基于FPGA的EtherCAT从站设计是一种高效的工业自动化通信解决方案。
通过FPGA的灵活编程和高性能计算能力,可以实现实时性强、功能定制化的通信功能。
ethercat电路原理

ethercat电路原理EtherCAT(以太网控制自动化技术)是一种基于以太网的工业以太网技术,用于实现实时性要求高的工业控制应用。
它的电路原理涉及到以太网物理层、数据链路层和应用层的设计。
在EtherCAT 电路中,主要包括以下几个部分:1. 物理层:EtherCAT 采用了标准的以太网物理层,支持100BASE-TX 和1000BASE-T 以太网标准。
物理层负责将数据在以太网链路上进行传输。
2. 数据链路层:EtherCAT 在数据链路层使用了一种特殊的协议,称为EtherCAT 协议。
该协议采用了主从结构,主站负责发送数据帧,从站负责接收和处理数据。
EtherCAT 协议通过以太网数据帧的扩展字段来传输实时数据和控制信息。
3. 应用层:EtherCAT 应用层包括设备描述文件(Device Description File,DDF)和过程数据对象(Process Data Object,PDO)。
DDF 用于描述从站设备的特性和功能,PDO 用于传输实时的过程数据。
EtherCAT 电路的工作原理是:主站发送数据帧到从站,从站接收数据并根据DDF 进行解析和处理。
如果数据帧中包含PDO 数据,从站将实时数据传输给主站。
主站可以通过轮询或事件触发的方式与从站进行通信。
EtherCAT 的实时性是通过使用特殊的数据链路层协议和硬件实现的。
它采用了时间同步机制,保证了数据传输的确定性和实时性。
需要注意的是,以上是EtherCAT 电路的基本原理,实际的EtherCAT 系统还涉及到更多的细节和功能,如网络拓扑、从站配置、错误处理等。
如果你需要更深入了解EtherCAT 电路原理,建议参考相关的技术文档和资料。
一种高性能EtherCAT实时以太网从站的设计

一
种 高 性 能 E h r AT实 时 以太 网从 站 的设 计 teC
施 大发 p , 建 林 王 刘 , 辉 阮倩 茹 ,
408) 10 2
( .湖南 机电职业 技术 学院电气工程系 , 1 中国 长沙
40 5 ;.湖南大学 电气与信息工程学院 , 1 1 12 中国 长沙
摘
要
介绍 了新 型实时工业以太网技术 Eh rA te T的工作原理及 技术实现 , C 通过分析 E 10 T 10芯 片的结构及
3 1 从 站控制器 E l0 . T l0的 内部结构 E 10 T 10是 一 款 强 大 的 Eh r t - e C T从 站控 制器 E C专用 芯 片 , A S 具
图2 t r T 统从站 E 。 A 系 hI = 硬件结 构图
有 丰 富 的接 口资 源. 它具 有 4个 数 据 收发端 口、 8个 F MMU单元 、 K 4B 控 制 寄 存 器 、 K 过 程 数 据 存 储 8B 器、 支持 6 4位 的分 布 时钟 功 能 . 其 内部功 能结构 如 图 3所 示 .
第 3期
施大发等 : 一种高性能 Ehr A teC T实时 以太 网从站 的设计
3 9
图 4 基 于 E 10 T 1 0的 Eh r A teC T从 站 结 构框 图
U NK MI I RX C LK
RX DV
—
PHY
_
T X
—Leabharlann TX.. R XD[.】 30 R E X R
3 3 MI 接 口与 E U . I B S接 口
E 10 T 10有 4个 物理通 信端 口, 分别 命名 为端 口 0到端 口 3 每个端 口都可 以配置为 MI接 口或 E U , I B S接 口两种形 式. T 10使 用 MI接 口时 , E 10 I 需要 外接 以太 网物 理层 P Y芯 片. H O T H P Y P R S可 由 K 82 B S7 1 L芯 片 来 实现功 能 , H P Y与 E 10 T 10之 间是通 过 M I 口来 连接 的 , 了降低处 理/ I接 为 转发 延时 ,T 10的 MI接 口省 E 10 I 略了发送 FF . IO 具体连 接方式 如 图 5所示 .
ethercat通讯原理

ethercat通讯原理EtherCAT是一种为实时工业自动化系统设计的高性能工业以太网技术。
它是一种开放的通信协议,可以将多个设备连接到一个通信网络中,并以极低的延迟进行通信。
EtherCAT采用了一种特殊的通信架构,该架构允许数据在网络上以流的形式传输,从而实现了高实时性。
EtherCAT的通信原理可以分为以下几个主要步骤:1. 主节点发送数据帧:EtherCAT网络中的一个设备被指定为主节点,负责控制整个网络的通信。
主节点将数据以数据帧的形式发送到网络上,这个数据帧被称为EtherCAT Telegram。
2.数据帧传输:数据帧通过物理层以太网传输到网络中的设备。
每个设备都有一个物理层的接口,用于接收和发送数据帧。
3.通过数据帧的芯片级处理:当数据帧被接收到设备的物理层接口时,数据帧被解析成多个指令和数据。
设备的芯片级处理器对这些指令和数据进行处理,并执行相应的操作。
4.数据帧处理:设备将接收到的数据帧传递给下一个设备。
数据帧的处理速度非常快,因此在数据帧传递的过程中,网络上的各个设备可以同时处理数据帧。
5.数据更新:数据帧在网络上的传递形成一个环路,当数据帧回到主节点时,主节点通过输入和输出数据的比较来检测数据是否有变化。
如果有变化,主节点将更新数据并再次发送到网络上。
通过上述步骤,EtherCAT实现了高实时性的通信。
1. 一次传输多个数据:在EtherCAT网络上,可以通过一个数据帧传输多个数据。
这意味着多个数据可以同时传输,从而减少了通信的延迟时间。
2. 高速数据传输:由于EtherCAT采用了流式传输的方式,数据可以非常快速地在网络上传输。
在EtherCAT网络上,数据的传输速度可以达到每个数据帧几十微秒的处理时间,这使得实时性非常高。
3.数据更新及时:当数据帧回到主节点时,数据可以及时更新。
这意味着设备可以及时获得最新的数据,从而实现更高的控制精度。
总而言之,EtherCAT通信的原理主要是通过主节点将数据以数据帧的形式发送到网络中,然后数据帧在网络上传递并被各个设备处理,最后数据帧回到主节点进行数据更新。
ethercat从站原理

ethercat从站原理摘要:一、EtherCAT简介二、EtherCAT从站原理1.从站硬件设计2.从站软件设计3.从站通信机制4.从站实时性能优化三、EtherCAT在工业自动化领域的应用四、EtherCAT在我国的发展现状与前景正文:EtherCAT是一种实时工业通信协议,广泛应用于工业自动化领域。
其特点是低延迟、高响应和高可靠性,满足了工业生产对实时数据监控的需求。
本文将从EtherCAT的从站原理、通信机制以及在我国的发展现状等方面进行详细介绍。
一、EtherCAT简介EtherCAT(Ethernet Control Area Terminal)是一种基于以太网的实时通信协议,由德国B&R公司开发。
它将实时性能与以太网的灵活性相结合,实现了在工业自动化领域的高效通信。
与传统的以太网协议相比,EtherCAT能够在同一网络上实现实时数据传输和非实时数据传输,满足了工业生产中对低延迟、高响应和高可靠性的要求。
二、EtherCAT从站原理1.从站硬件设计EtherCAT从站的硬件设计主要包括以太网接口、实时处理器和存储器等部分。
从站设备通过以太网接口与主站进行通信,实时处理器负责处理通信协议和实时任务,存储器用于存储程序和数据。
2.从站软件设计从站软件设计主要包括通信协议栈、应用层协议和实时任务调度。
通信协议栈负责实现以太网帧的收发和EtherCAT协议的解析;应用层协议用于实现设备间的数据交换;实时任务调度则确保实时任务的正确执行。
3.从站通信机制EtherCAT采用分布式实时控制系统(DRC)作为通信机制,实现了数据的高速传输和实时监控。
在通信过程中,主站与从站之间通过周期性发送和接收数据帧来实现数据交换。
相较于传统以太网协议,EtherCAT通过优化数据帧的传输时序,降低了通信延迟。
4.从站实时性能优化为满足工业生产对实时性能的要求,EtherCAT从站采用了以下措施进行优化:a.高速数据传输:通过提高以太网传输速率,实现数据的高速传输。
EtherCAT数据采集系统中的无线传感器节点时钟同步技术研究的开题报告

EtherCAT数据采集系统中的无线传感器节点时钟同步技术研究的开题报告一、研究背景数据采集系统通常需要多个无线传感器节点进行数据传输和协作,在数据传输和处理中,需要确保各个节点的时钟同步。
传统的时钟同步方法,如网络时钟协议(NTP)、精确定时协议(PTP)等,虽然可以提供精确的时间同步,但需要额外的硬件支持和通信传输开销,不利于实际应用。
因此,研究一种简单高效的无线传感器节点时钟同步技术,对于提高系统性能、减少成本和降低能耗具有十分重要的意义。
二、研究目的本研究旨在设计一种基于EtherCAT总线的无线传感器节点时钟同步技术,以实现系统实时性的需求,提高系统性能和稳定性。
三、研究内容1. 基于EtherCAT总线的无线传感器节点设计与实现。
2. 研究EtherCAT总线时钟同步机制,优化EtherCAT总线的时钟同步算法。
3. 针对无线传感器节点的时钟同步需求设计一种简单高效的时钟同步算法,实现节点之间的时间同步。
4. 实验验证算法的有效性和稳定性。
四、论文结构本文分为六个部分,具体内容如下:第一部分:引言本部分主要介绍研究背景、研究目的和研究内容。
第二部分:相关技术综述本部分主要介绍EtherCAT总线技术、无线传感器网络技术、时钟同步算法等相关技术背景和研究现状。
第三部分:EtherCAT总线无线传感器节点设计与实现本部分主要介绍EtherCAT总线无线传感器节点的硬件设计、软件设计和通信方式等方面。
第四部分:EtherCAT总线时钟同步机制优化本部分主要介绍EtherCAT总线时钟同步机制,分析现有算法的优缺点,并提出改进方案。
第五部分:无线传感器节点时钟同步算法设计本部分主要介绍无线传感器节点时钟同步算法设计,包括算法原理、模型建立、时间同步误差分析等内容。
第六部分:实验验证与结论本部分主要介绍实验方法和结果分析,总结本文的研究成果,探讨进一步的研究方向和应用前景。
五、研究意义本研究提出了一种基于EtherCAT总线的无线传感器节点时钟同步技术,对于提高系统实时性、降低成本和能耗具有重要的意义。
ethercat 方案
EtherCAT 方案1. 概述EtherCAT(Ethernet for Control Automation Technology)是一种用于实时控制的高性能工业以太网通信协议。
它是一种开放的标准,允许实时数据在多个从站设备之间进行高效的通信。
EtherCAT 方案适用于各种工业自动化应用,提供了高速、实时和可靠的通信能力。
2. EtherCAT 架构EtherCAT 网络由一个主站(Master)和多个从站(Slave)组成。
主站负责控制和调度整个网络的通信,在每个通信周期内向从站发送命令和接收数据。
从站负责执行主站发送的命令并返回相应的数据。
EtherCAT 网络使用总线拓扑结构,所有从站设备通过一根共享的以太网电缆连接在一起。
3. EtherCAT 实时通信EtherCAT 的实时通信能力是其最重要的特点之一。
通过使用分布时钟和数据处理的方式,EtherCAT 实现了极低的通信延迟和高带宽利用率。
每个从站设备接收到主站发送的数据后,便可以立即进行处理并向下一个从站传递数据,从而实现了实时通信。
4. EtherCAT 网络拓扑EtherCAT 网络可以灵活地配置为不同的拓扑结构,根据具体的应用需求选择适合的网络结构。
常见的拓扑结构包括:线性结构、环状结构和星形结构。
线性结构适用于长距离的通信,环状结构适用于需要高可靠性和冗余的场景,星形结构适用于连接多个从站设备到一个主站的场景。
5. EtherCAT 协议栈EtherCAT 协议栈是实现 EtherCAT 通信的软件组件。
它包含了从物理层到应用层的各个协议组成部分,并提供了一种简便的方式来进行 EtherCAT 网络的开发。
常见的 EtherCAT 协议栈包括 Beckhoff 的 TwinCAT、EtherCAT Slave Stack 和EtherCAT Master Stack 等。
6. EtherCAT 主从站配置在 EtherCAT 网络中,主站和从站的配置是非常重要的。
EtherCAT技术的原理、性能及应用优势
EtherCAT技术的原理、性能及应用优势简介EtherCAT主张“以太网控制自动化技术” 。
它是一个开放源代码,高性能的系统,目的是利用以太网协议(最惠国待遇系统局域网),在一个工业环境,特别是对工厂和其他制造业的关注,其中利用机器人和其他装备线上的技术。
EtherCAT是IEC规范(IEC/PAS 62407)。
原理目前有多种用于提供实时功能的以太网方案:例如,通过较高级的协议层禁止CSMA/CD 存取过程,并使用时间片或轮询过程来取代它。
其它方案使用专用交换机,并采用精确的时间控制方式分配以太网数据包。
尽管这些解决方案能够比较快和比较准确地将数据包传送到所连接的以太网节点,但带宽的利用率却很低,特别是对于典型的自动化设备,因为即使对于非常小的数据量,也必须要发送一个完整的以太网帧。
而且,重新定向到输出或驱动控制器,以及读取输入数据所需的时间主要取决于执行方式。
通常也需要使用一条子总线,特别是在模块化I/O系统中,这些系统与Beckhoff K-总线一样,通过同步子总线系统加快传输速度,但是这样的同步将无法避免引起通讯总线传输的延迟。
通过采用EtherCAT技术, Beckhoff突破了其它以太网解决方案的这些系统限制:不必再像从前那样在每个连接点接收以太网数据包,然后进行解码并复制为过程数据。
当帧通过每一个设备(包括底层端子设备)时,EtherCAT从站控制器读取对于该设备十分重要的数据。
同样,输入数据可以在报文通过时插入至报文中。
在帧被传递(仅被延迟几位)过去的时候,从站会识别出相关命令,并进行处理。
此过程是在从站控制器中通过硬件实现的,因此与协议堆栈软件的实时运行系统或处理器性能无关。
网段中的最后一个EtherCAT 从站将经过充分处理的报文返回,这样该报文就作为一个响应报文由第一个从站返回到主站。
从以太网的角度看,EtherCAT总线网段只是一个可接收和发送以太网帧的大型以太网设备。
基于EtherCAT的工业以太网数据采集系统
I ywo d E hr A u ;n u时 Eh re;aagteig r s teC Tb sid s Ke l ten td t ahr n
1 概 述
数据采集是 以前端 的模 拟信 号处理、数字 化、数字 信号 处 理 和 计 算机 等 高 科 技 为 基 础 而 形成 的 一 门 综 合 技 术 …。数 据采集卡 是 目前广泛采用 的数据采集 方式 。然而 ,一块数 J
第3 6卷 第 3 期
VL o 36 N o3
计
算
机
工Hale Waihona Puke 程 21 0 0年 2月
Fe ua y 20 0 br r 1
Com pu e gi e i t rEn ne r ng
・工程应 用 技术 与 实现 ・
文章编号: 0 48 003 _3— 3 10 2( l)—0 7 2 0 2
2 S h o fElcr n c& If r to gn ei 。 la ie st fT c noo y Dain 1 6 2 ) .col o e to i n o mainEn ie rng DainUnv ri o e h lg , l 0 4 y a 1
[ src ]Ai n t a eli efr ac ,o rl bl n ihc s o ir ue d s yEh me aag teigsse tip pr Abtat miga b dra—mepro n e lw ei it adhg ot f s i tdi ut te t t ahr ytm,hs a e t m a i y d tb n r d n
HD R
EtherCAT的实施

从站评估工具包
倍福公司提供的从站评估工具包使接口操作变得简便易行。由于采用了 EtherCAT,无需功 能强大的通讯处理器,因此,可将从站评估工具包中的 8 位 微处理器作为主机 CPU 使用。 该工具包还包括源代码形式的从站主机软件(相当于协议堆栈)和参考主站软件包 (TwinCAT)。
EtherCAT 的实施 EtherCAT 的实现/实施 简介
EtherCAT 主站可以用软件,在标准的以太网媒体接入控制器中实现。许多供应商有提供在 不同操作系统下的程式码,也有许多开源软件或共享软件。EtherCAT 从站需要特殊的 EtherCAT 从站控制器,才能实现飞速传输(processing on the fly)的技术。EtherCAT 从站 控制器可以用 FPGA 来实现,且已有现成的代码,此控制器也可以用 ASIC 来实现。
可以看到,EtherCAT 主站完全在主机 CPU 中采用软件方式实现,相比之下,传统的慢速 现场总线系统通过有源插接卡方可实 现主站的方式则要占用更多的资源,甚至服务于 DPRAM 的有源卡本身也将占用可观的主机资源。 系统配置工具(通过生产商获取)可提供包括相应的标准 XML 格式启动顺序在内的网络 和设备参数。
主站
EtherCAT 可以在单个以太网帧中最多实现 1486 字节的分布式过程数据通讯。其它解决方 案一般是,主站设备需要在每个网络周期中为各个节点处 理、发送和接收帧。而 EtherCAT 系统与此不同之处在于,在通常情况下,每周期仅需要一个或两个帧即可完成所 有节点的全部通讯,因 此,EtherCAT 主站不需要专用的通讯处理器。主站功能几乎不会 给主机 CPU 带来任何负担,轻松处理这些任务的同时,还可以处理应用程序,因此 EtherCAT 无需使用昂贵的专用有源插接卡,只需使用无源的 NIC 卡或主板集成的以太网 MAC 设备即可。EtherCAT 主站很容易实现,尤其适用于中小规模的控制系 统和有明确规 定的应用场合。 例如,如果某个单个过程映像的 PLC 没有超过 1486 字节,那么在其周期时间内循环发送 这个以太网帧就足够了。因为报文头运行时不会发生变化,所以只需将常数报文头插入到 过程映像中,并将结果传送到以太网控制器即可。 EtherCAT 映射不是在主站产生,而是在从站产生(外围设备将数据插入所经以太网帧的相 应位置),因此,此时过程映像已经完成排序。该特性进一 步减轻了主机 CPU 的负担。
ethercat主站协议例程
ethercat主站协议例程【原创版】目录1.EtherCAT 简介2.EtherCAT 主站 CPU3.EtherCAT 协议例程4.EtherCAT 的性能优势5.EtherCAT 的应用场景正文1.EtherCAT 简介EtherCAT 是一种以太网解决方案,它突破了其他以太网解决方案的系统限制。
EtherCAT 无需接收以太网数据包,将其解码,之后再将过程数据复制到各个设备。
从站设备在报文经过其节点时处理以太网帧,嵌入在每个从站中的 FMMU(现场总线存储管理单元)在帧经过该节点时读取相应的编址数据,并同时将报文传输到下一个设备。
同样,输入数据也是在报文经过时插入至报文中。
整个过程中,报文只有几纳秒的时间延迟。
主站方面也非常经济,商用的标准网卡(NIC)或任何主板集成的以太网控制器可以用作硬件接口。
2.EtherCAT 主站 CPUEtherCAT 主站 CPU 可以使用商用的标准网卡或主板集成的以太网控制器。
这些接口的共性就是数据通过 DMA(直接内存读取)传输至 PC,即网络读取时无需占用 CPU 资源。
3.EtherCAT 协议例程EtherCAT 协议在以太网帧内采用官方指定的以太类型。
采用这种以太类型即可允许在以太网帧内直接传输控制数据,而无需重新定义标准以太网帧。
该以太网帧可由多种子报文组成,每个子报文服务于逻辑过程映像区的特定内存区,该区域最大可达 4GB。
数据序列是独立于物理顺序的,所以以太网端子模块的编址可以随意排序。
从站之间的广播,多播和通讯也可得以实现。
4.EtherCAT 的性能优势EtherCAT 使网络性能达到了一个新高度。
借助于从站节点中的 FMMU 和网络控制器主站的直接内存存取,协议的处理过程完全在硬件中完成。
整个协议的处理过程都在硬件中得以实现,因此,完全独立于协议堆栈的实时运行系统、CPU 性能或软件实现方式。
1000 个 I/O 的更新时间只需30 s。
ethercat协议

EtherCAT协议简介EtherCAT(Ethernet for Control Automation Technology)是一种高性能、实时性强的工业以太网通信协议。
它被广泛应用于工业自动化领域,用于实时控制和数据采集。
本文将介绍EtherCAT协议的工作原理、优势以及应用场景。
工作原理EtherCAT采用主从式架构,其中有一个主节点(Master),多个从节点(Slave)以及通信线路组成。
主节点负责发送控制指令,从节点负责接收控制指令并执行相应的操作。
通信线路采用以太网技术,通过在以太网帧中封装EtherCAT帧来实现快速和实时的通信。
EtherCAT协议利用以太网的时分多路访问(Time Division Multiple Access)功能,在通信周期内将多个从节点的数据封装成一个帧进行传输。
主节点发送的控制指令通过一个环路(Ring)在从节点之间传递,每一个从节点都可以读取和修改需要的数据,然后将帧传递给下一个节点。
这种串联的方法大大降低了通信延迟和通信带宽的消耗,提高了通信速度和实时性。
优势高性能与实时性EtherCAT协议具有非常低的通信延迟和高的通信带宽,能够实现微秒级的实时控制。
这使得它非常适合于需要高性能和高实时性的应用,如机器人控制、高速运动控制等。
易于集成和扩展EtherCAT协议基于以太网技术,可以与现有的以太网设备兼容。
它能够利用现有的以太网物理层和网络结构,减少硬件设备和布线的成本。
同时,EtherCAT协议也支持分布式扩展,可以方便地添加新的从节点,灵活应对不同的应用需求。
灵活的拓扑结构EtherCAT协议支持多种拓扑结构,包括线性、环状、星型等。
用户可以根据具体的应用需求选择合适的拓扑结构,从而更好地满足系统的可靠性和可扩展性要求。
强大的诊断和监控功能EtherCAT协议具有强大的诊断和监控功能,可以实时监控从节点的状态和性能指标。
主节点可以根据从节点的反馈信息进行故障诊断和状态监控,提高系统的可靠性和稳定性。
EtherCAT智能从站设计与实现
协议 通信模块 cm — A— E,模块 内部 已经 集成通信 芯 片 oX C R
nt 和 固化 程 序 ,用 户 控 制 器 C U 通 过 嵌 入式 模 块 提 供 的 e X P 双 端 口 内存 D M( ulP rMe oy 接 口与 模 块 进 行 数 据 通 P D a o m r) — t 信 。该 模 块 使 用 起 来 就 像 一 个 内 存 。 nt 网络 控 制 器 是 赫 优 讯 公 司 推 出 的 新 一 代 工 业 网 络 e X
关 键 词 :实 时 以 太 网 ;EteCAT;双 端 口 内存 ;嵌 入 式模 块 c mX;¥ C 4 0 hr o 2
文献标识码 : A
文 章 编 号 :17 — 2 6 2 1 )2 o 6 — 3 6 4 6 3 (0 12 一 o 6 0
器 , 用嵌 入式 实时 操作 系统 Lnx构 成整 个 系统 的开发 平 台。 使 iu ,
1 嵌 入 式 通 讯 模 块 c mX o
在 本 系 统 设 计 的从 站 设 备 中 , 网络 协 议 控 制 器 使 用 的 是 德 国赫 优 讯 ( ic e) Hl hr 自动 化 系统 有 限 公 司开 发 的 Eh rA s teC T
Th e in a d i p e e tto ft ei tl g n h r ed s n g m lm n a i n 0 h n el e tEt e CAT l v tto i sa esa i n
Z A G Yn -i , H N h n H N igj Z A GZ eg e
第l 9卷 第 2 2期
ethercat 扫描原理

ethercat 扫描原理EtherCAT(Ethernet for Control Automation Technology)是一种用于实时控制和自动化领域的工业以太网协议。
EtherCAT的扫描原理是一种分布式实时控制系统的工作方式。
下面是EtherCAT扫描原理的基本概念:1. 主站和从站: EtherCAT网络通常包括一个主站(Master)和多个从站(Slave)。
主站负责控制和协调整个网络,而从站执行主站下达的命令。
2. 分布式时钟同步:EtherCAT通过在网络上传递分布式时钟同步信息,使得网络中的所有设备都能够保持高精度的时间同步。
这对于实时控制非常重要,因为各个设备需要协同工作,并在同一时刻进行数据交换。
3. Telegram(电报):EtherCAT使用Telegram来在网络中传递数据。
Telegram是一种数据包,其中包含从站的输入数据、主站的输出数据以及同步信息。
4. 扫描过程:EtherCAT的扫描过程是一个实时的、循环的过程。
在每个通信周期内,主站向从站发送电报,从站接收并处理电报,然后将响应数据传回主站。
这个过程非常迅速,允许实时控制系统以非常高的速率运行。
5. Distributed Clocks(分布式时钟): EtherCAT的分布式时钟允许从站在相同的时间基准上进行操作。
主站负责向网络中的每个从站发送同步信息,使得整个网络的时钟同步到毫秒或亚毫秒级别。
6. 环形拓扑结构:EtherCAT网络通常采用环形拓扑结构,即主站通过一个物理线圈连接到每个从站。
这样的设计使得电报能够沿着环形结构快速传递,减少了通信的延迟。
总体来说,EtherCAT的扫描原理通过分布式时钟同步、快速的电报传递和环形拓扑结构,实现了高效的实时控制和数据交换。
这使得EtherCAT在工业自动化领域中得到广泛应用,特别是对于需要高性能、低延迟的实时应用场景。
基于STM32_的EtherCAT_转UDP_通信转换系统设计与实现
10Internet Communication互联网+通信以太网控制自动化技术EtherCAT 在工业自动化领域应用广泛。
在工业以太网总线技术EtherCAT 中,从站之间的通信采用分布式时钟同步机制,保证了通信的高速、低延迟、同步和确定性。
然而,EtherCAT 与工控机端的通信网络一般采用TCP/IP 协议,由于其需要建立连接和确认数据的传输,无法与EtherCAT 直接进行数据交互,导致了通信的非实时性,因此,需借用硬件介质进行通信协议转换。
伺服电机、步进电机和输入/输出口的控制过程非常复杂,任何一个控制环节出错都会造成控制系统运行不稳。
在实际产品开发中,考虑成本因素无法直接在控制系统中运行实时分析软件,而是要将相应数据实时地传输到PC 机上,通过PC 机上的数据采集、分析软件中查找、定位问题根源。
为了实现EtherCAT 与工控机端的TCP/IP 协议的互通,本文提出了一种基于UDP 协议的通信转换方案,利用UDP 协议的无连接和高带宽特点,提高通信的效率和速度,同时利用FPGA 开发的高性能TCP/IP 通信模块,保证通信的实时性和可靠性。
一、系统硬件设计系统的控制部分包括STM32F103、FPGA。
STM32F103程序负责控制LAN9252和FPGA 的通信,以及配置88E1111 PHY 芯片的寄存器。
FPGA 程序负责实现可变静态存储控制器通信模块、UDP 通信模块和88E1111 PHY 芯片配置模块。
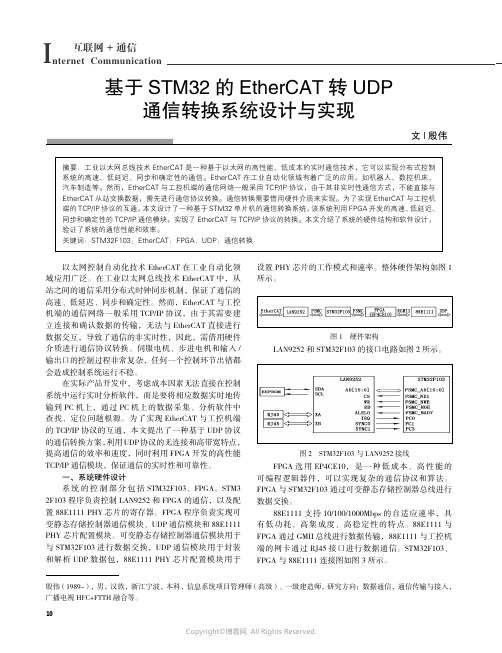
可变静态存储控制器通信模块用于与STM32F103进行数据交换,UDP 通信模块用于封装和解析UDP 数据包,88E1111 PHY 芯片配置模块用于基于STM32的EtherCAT 转UDP通信转换系统设计与实现设置PHY 芯片的工作模式和速率。
整体硬件架构如图1所示。
图1 硬件架构LAN9252和STM32F103的接口电路如图2所示。
图2 STM32F103与LAN9252接线FPGA 选用EP4CE10,是一种低成本、高性能的可编程逻辑器件,可以实现复杂的通信协议和算法。
ethercat原理介绍及应用实例

ethercat原理介绍及应用实例EtherCAT的原理是基于以太网技术的,但与传统以太网不同的是,它使用了一种称为“分布式时钟同步”的技术。
在EtherCAT网络中,每个从站(Slave)都具有自己的时钟,主站(Master)通过广播同步帧将数据发送给所有的从站,从站们都能够在同一时刻接收到数据。
这种同步技术使得EtherCAT网络能够以很高的实时性和精准度传输数据,从而满足实时控制系统的要求。
在实际应用中,EtherCAT可以用于各种工业自动化系统中,例如机床、生产线、机器人等。
下面将介绍一些实际应用案例,以便更好地理解EtherCAT的应用。
1. 机械控制系统在机械控制系统中,通常需要对各种运动控制设备进行精确控制。
EtherCAT可以被用来连接各种运动控制器、伺服驱动器、编码器等设备,实现对机械系统的实时控制。
通过EtherCAT网络,可以将各个控制设备连接在一起,实现数据共享和同步控制。
举例来说,一个自动化生产线中可能会有多个运动轴需要控制,比如输送带、机械臂等。
利用EtherCAT网络可以将这些运动轴连接在一起,实现统一的运动控制。
主站可以发送指令给各个从站,从而实现对多个运动轴的同步控制,提高生产效率和精度。
2. 工业机器人工业机器人是现代工业生产中不可或缺的设备,它可以自动执行各种生产任务,提高生产效率和产品质量。
在工业机器人的控制系统中,需要实时传输大量的数据,以确保机器人的运动精度和安全性。
EtherCAT可以被用来连接机器人控制器、传感器、执行器等设备,实现对工业机器人的实时控制。
通过EtherCAT网络,控制器可以实时接收到传感器的数据,并根据实时情况做出相应的控制指令,从而确保机器人的准确运动和安全操作。
3. 数据采集和监控系统在工业生产中,需要采集和监控各种数据来确保生产过程的正常运行。
EtherCAT可以被用来连接各种传感器、控制器、监控设备等,实现对工业过程的实时监控和数据采集。
基于DMA方式的EtherCAT网络数据采集系统研究
关键词 :teC T D EhrA ; MA;I 片机 ; 据采 集 ; PC单 数 从站控 制 器
中图分 类号 :P 7 T 24 文 献标识 码 : A 文章 编号 :0 0— 8 9 2 1 ) l一 0 0— 5 10 8 2 ( 0 2 O 0 7 0
Re e r h o h r s a c fEt e CAT Da a Ac u st n S se Ba e n DM A o e t q ii o y t m s d o i M d
L .u LU Hu WA G L i WAN ig, HA G Q n I go, I a, N e , Mu GJn Z N u
2 D p r e t f lc o i I om t nE g e r g D l n U i r t o T c n l , ai 10 4 C ia) . e at n o E et n m r c& n r a o n i e n , a a nv s y f e h o g D l n1 6 2 , hn f i n i i e i o y a
16 2 ) 104
摘要: 由于 D MA( i c m m r ces直接 存储 器存 取 ) dr t e oyacs, e 方式 无 需进行 周期 挪 用地读 取 外设 寄存 器数 据 , C U并行 工作 , 而最 大限度地 实现 了大批 量数据 实时处理 。利 用这 一特 点 , 了进 一 步提 高 网 与 P 从 为 络数据 采 集 系统 的 实时性 , 出了基 于 D 提 MA方式 构建 EhrA teC T网络 数 据 采集 系统的 方案 。 简单介 绍 了 EhrA t C T技 术特 点和通信 原理 , e 详细介 绍 了采 集 系统在 D MA方 式下的 工作原理 , 阐述 了系统 的硬件
ethercat 入门 系统描述

EtherCAT 入门系统描述导言EtherCAT(以太CAT)是一种实时以太网通信协议,用于在工业自动化领域中,实现高性能、低延迟的实时控制系统。
本文将介绍EtherCAT的基本概念、工作原理、应用领域和入门实践,帮助读者对EtherCAT有一个全面的了解。
1. EtherCAT 概述EtherCAT是一种基于以太网的实时控制总线技术,由Beckhoff在2003年开发并发布。
EtherCAT使用一种分布式时钟同步方法,可以在微秒级实现通信,具有低延迟和高带宽的特点。
它通过实时以太网实现分布式控制器、设备和传感器之间的通信,并支持多种通信拓扑,如线性、环形和星形等。
2. EtherCAT 架构EtherCAT系统由主站和从站组成。
主站通常是一个工控机或PLC,负责发送和接收数据。
从站可以是各种类型的设备和传感器,如电机驱动器、温度传感器等。
主站通过EtherCAT总线将数据发送到从站,并从从站接收响应数据。
3. EtherCAT 性能特点3.1 高实时性EtherCAT通过一种优化的通信协议和分布式时钟同步机制,实现了高实时性的通信。
在EtherCAT网络中,从站可以将数据实时传输到主站,主站可以实时下发控制指令到从站,这使得EtherCAT非常适用于实时控制和反馈应用。
3.2 低传输延迟EtherCAT的通信延迟非常低,通常在微秒级别。
这主要得益于EtherCAT的传输方式,数据在从站上通过实时以太网线路进行处理,然后再通过总线传输到主站。
这种快速传输的特点使得EtherCAT在需要快速响应的应用中非常有用。
3.3 高带宽EtherCAT的带宽可以根据实际应用需求进行扩展,可以支持多个从站同时进行数据传输。
这使得EtherCAT在需要高带宽的应用场景中非常适用,如高速运动控制和大规模数据采集等。
4. EtherCAT 应用领域EtherCAT在众多工业自动化领域中得到广泛应用,以下是一些常见的应用领域:- 机床控制:EtherCAT可用于高精度和高速度的机床控制系统,通过将运动控制器和传感器连接到EtherCAT总线上,实现快速准确的运动控制。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
数采与处理计算机测量与控制.2010.18(4) Com puter Measurement &C ontrol961中华测控网chinamca.co m收稿日期:2009 09 21; 修回日期:2009 11 09。
基金项目:国家自然科学基金项目(50879098)。
作者简介:李木国(1953 ),男,辽宁庄河人,教授,主要从事网络运动控制、图像测量等方向的研究。
文章编号:1671 4598(2010)04 0961 04 中图分类号:T P274文献标识码:BEtherCAT 网络数据采集系统的设计与实现李木国1,孔丽丽2,王 磊2,王 静1,张 群1(1 大连理工大学海岸和近海工程国家重点实验室,辽宁大连 116024;2 大连理工大学电子与信息工程学院,辽宁大连 116024)摘要:针对很多领域中数据采集量大、数据采集点分布广、间距长等问题设计了一种基于E th erCAT 工业以太网的网络数据采集系统;简介了EtherCAT 网络通信原理和结构,详细阐述了系统的硬件设计:以PIC 单片机为主控制器,采用一片AD 转换芯片并配合数个模拟量多路开关实现多路数据采集,并完成了E th erCAT 主站程序、从站应用程序的设计;最后,对采集系统进行了实验验证,实验结果证实了该网络数据采集系统的实用性和可靠性。
关键词:EtherCAT ;数据采集;PIC 单片机;从站控制器Design and Realization of Data Acquisition S ystem Based on EtherCATLi M ug uo 1,Ko ng Lili 2,Wang Lei 2,Wang Jing 1,Zhang Qun 1(1 Sate K ey L abor ator y of Coastal and O ffsho re Eng ineering ,Dalian U niv ersity of T echolog y,Dalian 116024,China;2 Depar tment o f Electro nic &Infor mation Engineering ,Da lian U niver sity o f T echno log y,DaL ian 116024,China )Abstract:A data acquisition system is given based on EtherC AT,w hich can solve man y p rob lem s in industry field s,such as the larg e amount of data,th e w ide scope of acqu isition positions,long dis tance an d so on.Th e paper analyzes the EtherCAT commun ication th eory and structu re,d esign s the hardw are in detail.And PIC microcontroller is th e m icrocontroller of the data acquisition system ,it can im plem ent data collecting us ing an AD converter an d a few chips of an alog m ulti-channel s witches.T he program of m as ter and the application program of slave are presen ted in th e paper.At las t,th e paper gives the experimen t resu lts and these resu lts indicate th e s ystem pres ented in the paper is good at application.Key words :Eth erCAT ;data acquis ition ;PIC m icrocontroller;slave controller0 引言在很多领域中数据采集点分布范围比较广泛,各采集点间距离长,不便于数据采集[1],因此,对这些领域的数据采集实行网络化具有现实意义。
现场总线的出现使得这一问题得到很好的解决,但是,大部分现场总线都定义了特定的数据帧格式,使得不同的现场总线网络很难兼容。
另外,现场总线的传输速率比较低,相应的实时性也比较差。
工业以太网作为一种成熟技术已成为通用网络标准,采用以太网实现数据通讯就是把远程数据传输、分布式运行及信息共享等特点应用到动态信号采集和分析领域[2]。
文中应用了德国倍福公司的工业以太网EtherCAT ,其具有开放性好、网络速度快、实时性好、可靠性高、拓扑结构灵活及兼容性好等特点。
Ether CAT 采用标准以太网帧结构,和其它现场总线有很好的兼容性。
文中设计的基于EtherCAT 的网络数据采集系统采用德国倍福公司提供的网络接口板为从站控制器,以PIC 单片机作为从站设备核心,负责实现数据采集。
此款数据采集卡可以实现高速实时远程数据采集处理,应用领域广泛。
1 EtherC AT 通信原理1 1 EtherCAT 帧结构特点Et her CAT 网络采用标准网络层次参考模型,三层结构为:物理层,数据链路层,应用层。
由专用的从站控制器实现网络通信。
EtherCA T 使用标准的IEEE802 3以太网帧,所以在主站方面非常经济,仅仅需要一块标准的以太网卡,不需要其他的硬件。
EtherCA T 帧的最大长度为1514字节,在帧头部分Ether CA T 用0x 88A 4H 来与其它类型网络相区别[3]。
帧结构如图1所示。
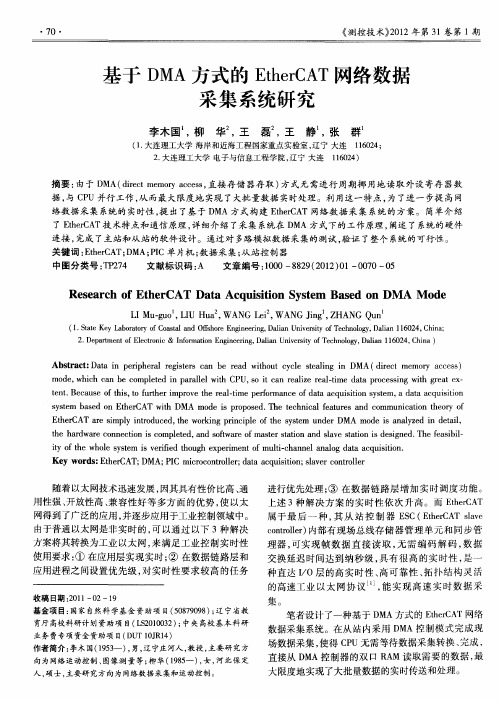
图1 Eth erCAT 帧结构1 2 从站控制器EtherCAT 从站控制器是采集系统的核心部分,从站控制器硬件整体结构框架如图2所示。
其主要模块是ESC,由专用集成芯片ET1100实现,负责主站上位机与从站设备之间数据传输,实现数据链路层功能,外扩EEPROM 用于存储设备描述语言XM L 文件等配置信息,PH Y 和T RA FO 实现物理层功能。
2 硬件电路构成与设计2 1 采集电路构成网络数据采集电路包括模拟多路开关、前置信号放大滤波962计算机测量与控制第18卷中华测控网chinamca.co m图2 EtherC AT 从站控制器结构模块、A/D 转换器、M CU 控制器、电平转换电路、从站控制器及I/O 通道等。
整个数据采集卡的布局可用图3描述。
传感器获取设备物理信息并转换成相应的电信号,经A D 转换变为数字信号,经单片机处理后由网络从站控制器进行数据打包传输出去,通过EtherCAT 网络送给主站[4]。
该采集卡设计为64通道模拟量输入,为了减少所使用A /D 转换芯片的个数,降低成本,采用4块模拟开关芯片ADG 706分时选通不同的模拟量通道。
A DG 706是16选1多路模拟开关。
由于采用硬件技术进行通道切换,其延时很小,可忽略不计。
故同时采样多路输入信号不会有明显差异[5]。
图3 采集系统总体结构图从传感器传来的被测信号的幅值变化范围从几毫伏到几十毫伏,因而必须在A /D 转换器的前级加上合适的前置放大偏置电路,以便充分利用A /D 转换器的满量程分辨率。
在放大器后级增设了有源滤波器,降低供电系统、空间电磁场等干扰噪声,进一步提高了数据采集精度[6]。
A/D 转换器选用AD 公司的AD7276,它是一款低耗、高速12位模数转换模块,拥有高速串行接口,可以通过SP I/QSP I 总线接口方式与M CU /DSP 等微处理器进行串行通信。
在PIC 单片机内部集成了SPI 模块,A D7276可以直接通过SPI 串行接口与PIC 单片机相连。
PIC24FJ256G A110是微芯公司一款高档系列16位单片机,采用哈佛结构,便于实现流水线作业,从而提高CP U 执行指令的速度[7]。
PI C24F J256GA 110内部集成3个SP I 总线接口,其中一个SP I 接口用于和AD7276相连。
并行主端口(PM P)模块是PIC24F 系列重要的接口模块,是专为与多种并行器件,如通信外设、LCD 、外部存储器和单片机等通信而设计的8位并行I/O 模块。
由于并行外设的接口差异很大,因此PM P 具有很强的可配置能力。
PIC24F 系列的PM P 模块如图4所示,其中PM A <15:0>为16位地址线,PM D <7:0>为8位数据线,P M WR 为写信号,PM RD 为读信号,P M BE 为8/16位选择线。
图4 PIC24FJ256GA110PM P 模块2 2 从站接口及采集电路硬件设计数据采集系统采用Et her CAT 从站控制器ET 1100的M CI 接口,M CI 接口要求从站设备是8/16bit 微控制器,ET 1100通过M CI 接口对外提供16位地址线A [15 0],16位数据线D [15 0]。
ET 1100通过M CI 接口PIC 单片机的P M P 模块相连时,把PIC 作为主端口,ET 1100为PM P 模块的并行从端口,对应的地址线、数据线和控制线分别相连。
由于在PM P 模块中只有8位数据线,如果想进行16位扩展,需要加锁存器,此处选择74L VC373。
A D7276可以直接通过SPI 串行接口与P IC 单片机相连,其原理图如图5所示。
图5 数据采集系统原理图3 系统软件设计系统软件设计主要包括两部分:主站软件设计和从站应用程序设计。
3 1 主站软件设计主站软件设计主要包括编写XM L 文件、主站驱动程序和过程数据映像等。
主站所有功能是由T w inCAT 实现的,其功能块图如图6所示。
X M L 文件是设备描述语言,负责对从站所使用的设备进行详细描述,让主站能够识别从站设备。
通过T winCA T 下载到从站控制器的EEP ROM 中。
部分内容如下:<Sub Item><Sub Idx >17</S ubIdx> <Name>Analoginpu t</Name> <T ype>INT </Type> <BitSize>16</BitS ize> <BitOffs>24</BitOffs> <Flags><Access >ro</Access>第3期李木国,等:Et herCAT 网络数据采集系统的设计与实现 963中华测控网chinamca.co m图6 主站功能块图<Category>o</Category> <PdoM apping>T </PdoM apping> </Flags> </S ubItem>3 2 从站软件设计从站软件设计主要包括两部分:网络接口软件和下位机数据采集应用软件。