核心板 STM32F1
基于STM32F1单片机的电子秤设计
基于STM32F1单片机的电子秤的设计1.本文概述随着技术的进步和电子技术的普及,电子秤已成为日常生活和工业生产中不可或缺的工具。
与传统的机械秤相比,电子秤具有更高的测量精度、更强的功能性和更广泛的应用范围。
本文旨在设计一种基于STM32F1单片机的电子秤。
该设计不仅专注于电子秤的称重和单位转换等基本功能,而且通过使用STM32F1微控制器,赋予电子秤更智能的功能,如数据存储、传输和用户界面交互。
文章首先介绍了STM32F1单片机的特点和适用性,然后详细阐述了电子秤的设计原理、硬件选择和软件实现。
本文还包括对系统的测试结果和分析,以验证设计的有效性和可靠性。
通过本文的研究和设计,有望为电子秤领域提供一种创新实用的解决方案。
2.系统设计原则在这种电子秤的设计中,STM32F1微控制器作为核心控制器,其重要性体现在以下几个方面:处理能力:STM32F1系列微控制器基于ARM CortexM3内核,具有强大的处理能力和高效的能耗比。
其最大工作频率可达72MHz,足以处理电子秤所需的复杂计算和数据传输任务。
集成:该系列微控制器集成了丰富的外围接口,如ADC(模数转换器)、UART(通用异步收发器)、I2C(集成电路总线)等。
这些接口对电子秤的设计至关重要。
稳定性和可靠性:STM32F1微控制器具有优异的抗干扰能力和稳定性,适用于工业应用,确保了电子秤在复杂环境中的准确性和可靠性。
电子秤的核心部件是传感器,用于将物体的重量转换为电信号。
在该设计中,选择了压力传感器作为主要测量元件。
传感器的工作原理是基于弹性变形。
当物体受到压力时,传感器内部的电阻应变计变形,从而改变电阻值并通过惠斯通电桥将其转换为电压信号。
信号放大和滤波:传感器输出的模拟信号通常较弱,需要通过信号放大器进行放大。
为了提高信号质量,设计了滤波电路来去除噪声,保证信号的准确性。
模数转换:通过STM32F1微控制器内置的ADC将放大后的模拟信号转换为数字信号,使微控制器易于处理和计算。
stm32f1命名规则

stm32f1命名规则STM32F1是STMicroelectronics(意法半导体)推出的一款低功耗、高性能的32位单片机系列产品。
它采用ARM Cortex-M3内核,具有丰富的外设接口和强大的计算能力,在工业控制、智能电力、汽车电子等领域得到广泛应用。
STM32F1系列具有一套严格的命名规则,下面将详细介绍这些规则。
1. 前缀:STM32F1系列的所有型号都以“STM32”作为前缀。
这一命名规则的设定使得不同系列的STM32单片机可以通过前缀进行区分,便于用户选择和使用。
2. 系列:紧随前缀之后的是系列标识符,对于STM32F1系列来说,其系列标识符为“F1”。
这一标识符的设置有助于区分不同的STM32系列,避免混淆。
3. 系列编号:在系列标识符之后,是一个数字编号,代表具体的型号。
例如,STM32F103系列、STM32F105系列等。
这些型号的编号是根据芯片的性能和功能进行划分的,不同的型号有着不同的特点和应用领域。
4. 封装:在型号编号之后,是封装标识符,用于标识芯片的封装形式。
例如,LQFP、BGA、QFN等。
封装形式的选择取决于具体的应用需求,不同的封装形式有着不同的特点和优势。
5. 温度等级:在封装标识符之后,是一个字母,表示芯片的温度等级。
例如,C表示商业级温度范围,I表示工业级温度范围。
温度等级的选择与应用环境有关,确保芯片在不同温度条件下的正常工作。
6. Flash大小:在温度等级之后,是一个数字,表示芯片的Flash 存储器大小。
例如,64表示64KB,128表示128KB等。
Flash存储器的大小决定了芯片能够存储的程序和数据量,不同的应用需求可以选择不同大小的Flash存储器。
7. RAM大小:在Flash大小之后,是一个数字,表示芯片的RAM存储器大小。
例如,20表示20KB,48表示48KB等。
RAM存储器的大小与芯片的数据处理和存储能力有关,不同的应用需求可以选择不同大小的RAM存储器。
stm32f1 标准例程
stm32f1 标准例程一、概述STM32F1是一款广泛应用于嵌入式系统开发的32位ARMCortex-M 内核微控制器。
标准例程是用于帮助初学者快速了解和掌握STM32F1的基本操作和功能的应用程序。
本例程旨在通过一系列简单的示例程序,帮助读者熟悉STM32F1的基本开发流程和常用功能。
二、开发环境设置1.安装KeiluVision开发环境,并配置相应的编译器和调试器。
2.下载STM32F1的固件库,并将其添加到KeiluVision项目中。
三、标准例程内容以下是一个简单的STM32F1标准例程程序,包含了LED灯的控制、按键输入、串口通信等功能:```c#include"stm32f10x.h"#include"stm32f1_system.h"#include"stm32f1_gpio.h"#include"stm32f1_rcc.h"#include"stm32f1_usart.h"#include"stm32f1_dma.h"//初始化GPIO和USART外设voidinit_peripherals(){GPIO_InitTypeDefGPIO_InitStruct;USART_InitTypeDefUSART_InitStruct;RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA|RCC_AHB1Perip h_USART2,ENABLE);GPIO_InitStruct.GPIO_Pin=GPIO_Pin_0|GPIO_Pin_1;//设置LED 灯和按键引脚为输出GPIO_InitStruct.GPIO_Mode=GPIO_Mode_OUT;GPIO_InitStruct.GPIO_Speed=GPIO_Speed_50MHz;GPIO_Init(GPIOA,&GPIO_InitStruct);USART_ART_BaudRate=9600;//设置串口波特率为9600USART_ART_WordLength=USART_WordLength_8b;//8位数据位USART_ART_StopBits=USART_StopBits_1;//1个停止位USART_ART_Parity=USART_Parity_No;//无奇偶校验位USART_ART_HardwareFlowControl=USART_Hardware FlowControl_None;//不使用硬件流控制USART_Init(USART2,&USART_InitStruct);}//按键中断处理函数voidUSART2_IRQHandler(){if(USART_GetITStatus(USART2,USART_IT_RXNE)!=RESET){//接收到数据中断//处理接收到的数据,例如通过按键值来判断用户操作switch(KEYB){caseKEYB_POWER://开关机键值定义,这里仅为示例if(ONOFF==0){//机器已开机状态检查ONOFF=1;//开启电源开关,机器开机启动LED灯闪烁}else{//机器已关机状态检查,关闭电源开关并关闭LED灯ONOFF=0;}break;default:break;//其他按键暂不处理,保留为默认值不发送回设备}USART_SendData(USART2,KEYB);//将按键值发送回设备,这里仅为示例发送一个按键值给设备进行反馈操作结果KEYB=KEYB&KEYB+1;//重置按键值计数器,保留不产生误触按按键的行为需求。
红牛开发板stm32f103zet6用户手册

红牛开发板用户手册 CopyRight@20091.概述红牛STM32开发板是以意法半导体 (ST)公司推出的基于ARM Cortex-M3系列最高配置芯片STM32F103ZE为核心组成。
板上资源:●CPU:STM32F103ZET6;(LQFP144脚,片上集成512K flash、64KRAM、12Bit ADC、DAC、PWM、CAN、USB、SDIO、FSMC等资源)●板上外扩512K SRAM, 2M NOR FLASH (板上支持最大1024kSRAM,16M的NOR FLASH)满足大容量数据采集、处理及分析要求●板上外扩128M或256M NAND FLASH(标配128M)满足彩屏上丰富的图片存储、数据表格存储,文件管理等应用● 搭配2.8寸TFT真彩触摸屏模块或3.2寸TFT真彩触摸屏模块(由用户选择),FSMC控制,彩屏模块上配置RSM1843(ADS7843、TSC2046脚对脚兼容)触摸控制器芯片,支持一个SD卡(SPI方式)可用于存储图片,支持一个AT45DBxxx 的DATA FLASH(可用于存储汉字库)● 一路CAN通信接口,驱动器芯片SN65VHD230● 两路RS232接口● 一路RS485通信接口● 一个SD卡座SDIO控制方式● 一个I2C存储器接口,标配24LC02(EEPROM)● 一个SPI存储器接口,标配AT45DB161D(DATA FLASH)● 一路ADC调节电位器输入● 三路ADC输入接线端子引出● 两路PWM输出接线端子引出● 两路DAC输出接线端子引出● 一个蜂鸣器、五个用户LED灯、一个电源指示灯,一个USB通信指示灯,● 四个用户按键,一个系统复位按键● 电源选择跳线,支持外接5V 电源供电,USB 供电或JLINK 供电 ● 板子规格尺寸:13CM X 10CM● 所有I/O 口通过2.54MM 标准间距引出,方便二次开发板上的全部硬件特性能快速帮助你评估STM32F103ZE 所有外设(USB 、motor control,、CAN,、SPI 、MicroSD card 、smartcard 、USART 、NOR Flash 、NAND flash 、 SRAM )和开发你自己的应用项目。
STM32F10x_SPI与I2S

SPI与I2S库函数。
Table.0-2 库函数列表串行外设接口(SPI)提供与外部设备进行同步串行通讯的功能。
接口可以被设置工作在主模式或者从模式。
/*【01】函数SPI_I2S_DeInit******************************************************************************* Function Name : SPI_I2S_DeInit* Description : Deinitializes the SPIx peripheral registers to their default* reset values (Affects also the I2Ss).* Input : - SPIx: where x can be 1, 2 or 3 to select the SPI peripheral.* Output : None* Return : None*******************************************************************************/void SPI_I2S_DeInit(SPI_TypeDef* SPIx){/* Check the parameters */assert_param(IS_SPI_ALL_PERIPH(SPIx));switch (*(u32*)&SPIx){case SPI1_BASE:/* Enable SPI1 reset state */RCC_APB2PeriphResetCmd(RCC_APB2Periph_SPI1, ENABLE);/* Release SPI1 from reset state */RCC_APB2PeriphResetCmd(RCC_APB2Periph_SPI1, DISABLE);break;case SPI2_BASE://I2S只有I2S2、I2S3,分别对应SPI2、SPI3。
野火F1开发板STM32案例-外部中断(按键)使用

野⽕F1开发板STM32案例-外部中断(按键)使⽤野⽕F1开发板STM32案例-外部中断(按键)使⽤硬件平台野⽕STM32F103ZET6 霸道V2开发板正点原⼦F1系列开发板软件平台Keil MDK 5.31串⼝调试助⼿Gitee .中断相关概念中断配置寄存器# 配置中断时,使⽤ISER、 ICER 和 IP 寄存器,## ISER 是中断使能寄存器## ICER 是中断清除寄存器## IP 是中断优先级寄存器中断优先级1. 数值越⼩,优先级越⾼2. STM32F103 中只使⽤4位,⾼4位有效。
3. ⽤于表达优先级的⾼ 4 位⼜被分组成抢占式优先级和响应优先级,称为“亚优先级”或“副优先级”4. 每个中断源都需要被指定这两种优先级。
中断配置步骤1.使能外设中断6. 设置中断优先级分组初始化 NVIC_InitTypeDef 结构体,设置抢占优先级和响应优先级,使能中断请求。
typedef struct{uint8_t NVIC_IRQChannel; //中断源uint8_t NVIC_IRQChannelPreemptionPriority; //抢占优先级uint8_t NVIC_IRQChannelSubPriority; //响应优先级FunctionalState NVIC_IRQChannelCmd; //中断使能或失能} NVIC_InitTypeDef;NVIC_IRQChannel 中断源:中断源的设置,不同的外设中断,中断源不⼀样NVIC_IRQChannelPreemptionPriority //抢占优先级NVIC_IRQChannelSubPriority //响应优先级NVIC_IRQChannelCmd //中断使能或失能:使能配置为 ENABLE,失能配置为 DISABLE。
NVIC_IRQChannel //中断源/****** Cortex-M3 Processor Exceptions Numbers ***************************************************/NonMaskableInt_IRQn = -14, /*!< 2 Non Maskable Interrupt */MemoryManagement_IRQn = -12, /*!< 4 Cortex-M3 Memory Management Interrupt */BusFault_IRQn = -11, /*!< 5 Cortex-M3 Bus Fault Interrupt */UsageFault_IRQn = -10, /*!< 6 Cortex-M3 Usage Fault Interrupt */SVCall_IRQn = -5, /*!< 11 Cortex-M3 SV Call Interrupt */DebugMonitor_IRQn = -4, /*!< 12 Cortex-M3 Debug Monitor Interrupt */PendSV_IRQn = -2, /*!< 14 Cortex-M3 Pend SV Interrupt */SysTick_IRQn = -1, /*!< 15 Cortex-M3 System Tick Interrupt *//****** STM32 specific Interrupt Numbers *********************************************************/WWDG_IRQn = 0, /*!< Window WatchDog Interrupt */PVD_IRQn = 1, /*!< PVD through EXTI Line detection Interrupt */TAMPER_IRQn = 2, /*!< Tamper Interrupt */RTC_IRQn = 3, /*!< RTC global Interrupt */FLASH_IRQn = 4, /*!< FLASH global Interrupt */RCC_IRQn = 5, /*!< RCC global Interrupt */EXTI0_IRQn = 6, /*!< EXTI Line0 Interrupt */EXTI1_IRQn = 7, /*!< EXTI Line1 Interrupt */EXTI2_IRQn = 8, /*!< EXTI Line2 Interrupt */EXTI3_IRQn = 9, /*!< EXTI Line3 Interrupt */EXTI4_IRQn = 10, /*!< EXTI Line4 Interrupt */DMA1_Channel1_IRQn = 11, /*!< DMA1 Channel 1 global Interrupt */DMA1_Channel2_IRQn = 12, /*!< DMA1 Channel 2 global Interrupt */DMA1_Channel3_IRQn = 13, /*!< DMA1 Channel 3 global Interrupt */DMA1_Channel4_IRQn = 14, /*!< DMA1 Channel 4 global Interrupt */DMA1_Channel5_IRQn = 15, /*!< DMA1 Channel 5 global Interrupt */DMA1_Channel6_IRQn = 16, /*!< DMA1 Channel 6 global Interrupt */DMA1_Channel7_IRQn = 17, /*!< DMA1 Channel 7 global Interrupt */STM32F103 中断向量表EXTI外部中断1. STM32F10x 外部中断/事件控制器(EXTI)包含多达 20 个⽤于产⽣事件/中断请求的边沿检测器。
stm32开发板哪个好

stm32开发板哪个好stm32开发板样式多种多样,stm32开发板哪个好?比如官方的4M板\mini stm32\野火开发板,还有【正点原子】的阿波罗STM32F429开发板、阿波罗STM32F767开发板、战舰V3开发板(Alientek);【野火】的STM32F103-霸道开发板、F429-挑战者;【安富莱】的STM32-V5,STM32F407开发板、安富莱STM32F103ZE开发板V4;在此首先列举ST官方开发板。
1、Nucleo板STM32 NUCLEO开发平台是ST最新发布的易用性好、可扩展性佳的低成本平台。
开发平台具有mbed功能支持Arduino接口,同时还提供ST Morpho扩展排针,可连接微控制器的所有周边外设,可以利用Arduino巨大生态系统优势,便于快速实现STM32学习和评估。
它具有六大特性:1、全新设计的ST-LINK/V2-1仿真器平台,可以独立使用2、更加灵活的供电方式,适合实验室和现场开发应用3、统一的主MCU核心板设计,真正一板多用4、外部资源少,可扩展性好5、支持在线和单机多种IDE开发环境,丰富开发人员的选择6、丰富的软件代码例程支持,方便短时间上手2、Discovery探索套件板STM32 探索套件是帮助新用户探索STM32性能的入门工具,同时为项目工程师提供快速制作样机的开发平台。
该套件包括演示特定器件特性所需的基础设施。
借助HAL库和综合软件示例,可从器件特性和附加价值中受益。
通过扩展连接器,可连接器件的大多数I/O,并有助于连接附加硬件。
集成若干外设模块,此探索套件由两个部分组成,一个ST-LINK/V2用于调试和编程,一个STM32的最小开发板集成了与对应STM32芯片特殊外设相关的其他器件。
3、STM32全功能评估板集成众多外设模块,通常板载对应系列最大封装的目标芯片。
同时搭载STLINK-V2,方便客户进行项目全功能评估开发。
如:STM32V100评估板STM103V100是英蓓特公司新推出的一款基于ST意法半导体STM32系列处理器。
stm32f1标准库开发手册

让我们来探讨一下关于STM32F1标准库开发手册的主题。
STM32F1系列是意法半导体推出的基于ARM Cortex-M3内核的32位微控制器系列,被广泛应用于工业控制、汽车电子、智能家居等领域。
而开发手册则是为了帮助开发者更好地理解和应用这一系列产品,提供了丰富的资料和示例代码,以便快速上手和开发。
接下来,我将以从简到繁、由浅入深的方式,逐步探讨STM32F1标准库开发手册的内容。
在文章中我会多次提及STM32F1标准库开发手册,以便让你更加深入地理解这一主题。
1. STM32F1标准库开发手册概述在STM32F1标准库开发手册中,我们可以找到丰富的资料,包括各种外设的驱动库以及丰富的示例代码。
通过这些资料,开发者可以快速了解每个外设的工作原理和使用方法,并可以直接借鉴示例代码进行开发,极大地提高了开发效率。
2. STM32F1标准库开发手册中的外设驱动库在STM32F1标准库开发手册中,每个外设都有相应的驱动库,开发者可以通过这些驱动库来操作和控制外设。
这些驱动库提供了丰富的API接口,方便开发者进行二次开发。
在开发过程中,可以根据具体需求来调用这些API接口,快速实现功能的扩展和定制化开发。
3. STM32F1标准库开发手册中的示例代码除了外设驱动库,STM32F1标准库开发手册还提供了丰富的示例代码,涵盖了各种外设的初始化、配置和应用。
通过这些示例代码,开发者可以直观地了解外设的使用方法,同时也可以作为基础代码进行修改和扩展,加速开发过程。
经过以上的简要介绍,让我们更深入地探讨STM32F1标准库开发手册。
在使用STM32F1标准库开发手册进行开发时,有几点需要特别注意:要熟悉STM32F1系列微控制器的数据手册和参考手册。
这些资料包含了微控制器的详细参数和功能描述,对于理解和使用外设至关重要。
要深入理解外设的工作原理和寄存器配置。
在实际开发中,直接操作寄存器可以提高代码的执行效率,因此了解每个寄存器的作用和配置是非常重要的。
STM32F1与STM32F2之间的兼容性

QFP64 STM32F20x F10x
5 6 31 47
F20x
5 6 31 47
3
PH0 - OSC_IN PH1 - OSC_OUT VCAP1 VCAP2
LQFP100封装兼容板
对于STM32F1芯片,零欧 姆电阻连到VSS 对于STM32F2芯片,零欧 姆电阻连到VDD 直接接地即可 对于STM32F1芯片,这里放置零欧姆电 阻或者焊接桥接通; 对于STM32F2芯片,这里直接断开即可
2
12 31 31 47 47 63 63
20 49 73 74 99
LQFP64封装兼容板
对于STM32F1芯片,这里放置零欧姆电阻或 者焊接桥接通 对于STM32F2芯片,这里直接断开即可
引脚名称 STM32F10x
PD0 - OSC_IN PD1 - OSC_OUT VSS_1 VSS_2
STM32F10x系列
工作电压 2.0V ~ 3.6V
STM32F2xx系列
1.8V(1.65V) ~ 3.6V
CPU最高工作频率
片上SRAM容量 片上闪存容量 外部存储器接口(FSMC) 备份SRAM
72MHz
高达96K字节 高达1M字节 100引脚及以上封装有 无
120MHz
高达128K字节 高达1M字节 100引脚及以上封装有 有4K字节
引脚名称 STM32F10x
PD0 - OSC_IN
PD1 - OSC_OUT VSSA VSS_1 VSS_3
QFP100 STM32F20x F10x
12
13 19 49 99
F20x
12
13 19 49 99
4
PH0 - OSC_IN
STM32F4与STM32F1的区别

STM32F4与STM32F1的区别• stm32F1是cortex- M3的内核。
Stm32f4是cortex-M4的内核• F1最⾼主频 72MHz, F4最⾼主频168MHz。
• F4具有单精度浮点运算单元,F1没有浮点运算单元。
• F4的具备增强的DSP指令集。
F4的执⾏16位DSP指令的时间只有F1的30%~70%。
F4执⾏32位DSP指令的时间只有F1的25%~60%。
• 程序存储器、数据存储器、寄存器和输⼊输出端⼝被组织在同⼀个 4GB 的线性地址空间内。
可访问的存储器空间被分成 8 个主要块,每个块为 512MB 。
F1⼩容量产品是指闪存存储器容量在 16K ⾄ 32K 字节,中容量产品是指闪存存储器容量在 64K ⾄ 128K ,⼤容量产品是指闪存存储器容量在 256K ⾄ 512K 。
主存储块容量:⼩容量产品主存储块最⼤为 4K × 64 位,每个存储块划分为 32 个 1K 字节的页 ( 见表 2) 。
中容量产品主存储块最⼤为 16K × 64 位,每个存储块划分为 128 个 1K 字节的页 ( 见表 3) 。
⼤容量产品主存储块最⼤为 64K × 64 位,每个存储块划分为 256 个 2K 字节的页 ( 见表 4) 。
互联型产品主存储块最⼤为 32K × 64 位,每个存储块划分为 128 个 2K 字节的页 ( 见表 5) 。
• F1内部SRAM最⼤64K字节, F4内部SRAM有192K字节(112K+64K+16K)。
STM32F10xxx 内置 64K 字节的静态 SRAM 。
它可以以字节、半字 (16 位 ) 或全字 (32 位 ) 访问。
SRAM 的起始地址是 0x2000 0000 。
STM32F405xx/07xx 和 STM32F415xx/17xx 带有 4 KB 备份 SRAM,和 192 KB 系统 SRAM 。
stm32f10x参考手册

STM32F10x参考手册第一版STM32F10x参考手册1文档中的约定 (1)1.1寄存器描述中使用的缩写列表 (1)2存储器和总线构架 (2)2.1系统构架 (2)2.2存储器组织 (3)2.3存储器映像 (4)2.3.1外设存储器映像 (5)2.3.2嵌入式SRAM (6)2.3.3位段 (6)2.3.4嵌入式闪存 (6)2.4启动配置 (8)3电源控制(PWR) (9)3.1电源 (9)3.1.1独立的A/D转换器供电和参考电压 (9)3.1.2电池备份 (9)3.1.3电压调节器 (10)3.2电源管理器 (10)3.2.1上电复位(POR)和掉电复位(PDR) (10)3.2.2可编程电压监测器(PVD) (10)3.3低功耗模式 (11)3.3.1降低系统时钟 (12)3.3.2外部时钟的控制 (12)3.3.3睡眠模式 (12)3.3.4停止模式 (13)3.3.5待机模式 (14)3.3.6低功耗模式下的自动唤醒(AWU) (15)3.4电源控制寄存器 (16)3.4.1电源控制寄存器(PWR_CR) (16)3.4.2电源控制/状态寄存器 (17)3.5PWR寄存器映像 (18)4复位和时钟控制 (19)4.1复位 (19)4.1.1系统复位 (19)4.1.2电源复位 (19)4.2时钟 (20)4.2.1HSE时钟 (22)4.2.2HSI时钟 (22)4.2.3PLL (23)4.2.4LSE时钟 (23)4.2.5LSI时钟 (23)4.2.6系统时钟(SYSCLK)选择 (24)4.2.7时钟安全系统(CSS) (24)4.2.8RTC时钟 (24)4.2.9看门狗时钟 (24)4.2.10时钟输出 (25)4.3RCC寄存器描述 (26)4.3.1时钟控制寄存器(RCC_CR) (26)4.3.2时钟配置寄存器(RCC_CFGR) (27)4.3.3时钟中断寄存器 (RCC_CIR) (29)4.3.4APB2外设复位寄存器 (RCC_APB2RSTR) (32)4.3.5APB1外设复位寄存器 (RCC_APB1RSTR) (33)4.3.6AHB外设时钟使能寄存器 (RCC_AHBENR) (35)4.3.7APB2外设时钟使能寄存器(RCC_APB2ENR) (36)4.3.8APB1外设时钟使能寄存器(RCC_APB1ENR) (37)4.3.9备份域控制寄存器 (RCC_BDCR) (39)4.3.10控制/状态寄存器 (RCC_CSR) (40)4.4RCC寄存器映像 (43)5通用和复用功能I/O(GPIO和AFIO) (44)5.1GPIO功能描述 (44)5.1.1通用I/O(GPIO) (45)5.1.2单独的位设置或位清除 (45)5.1.3外部中断/唤醒线 (46)5.1.4复用功能(AF) (46)5.1.5软件重新映射I/O复用功能 (46)5.1.6GPIO锁定机制 (46)5.1.7输入配置 (46)5.1.8输出配置 (47)5.1.9复用功能配置 (48)5.2GPIO寄存器描述 (50)5.2.1端口配置低寄存器(GPIOx_CRL) (x=A..E) (50)5.2.2端口配置高寄存器(GPIOx_CRH) (x=A..E) (51)5.2.3端口输入数据寄存器(GPIOx_IDR) (x=A..E) (52)5.2.4端口输出数据寄存器(GPIOx_ODR) (x=A..E) (52)5.2.5端口位设置/复位寄存器(GPIOx_BSRR) (x=A..E) (53)5.2.6端口位复位寄存器(GPIOx_BRR) (x=A..E) (53)5.2.7端口配置锁定寄存器(GPIOx_LCKR) (x=A..E) (54)5.3复用功能I/O和调试配置(AFIO) (55)5.3.1把OSC_IN/OSC_OUT引脚作为GPIO端口PD0/PD1 (55)5.3.2BXCAN复用功能重映射 (55)5.3.3JTAG/SWD复用功能重映射 (55)5.3.4定时器复用功能重映射 (56)5.3.5USART复用功能重映射 (57)5.3.6I2C 1 复用功能重映射 (58)5.3.7SPI 1复用功能重映射 (58)5.4AFIO寄存器描述 (59)5.4.1复用重映射和调试I/O配置寄存器(AFIO_MAPR) (60)5.4.2外部中断配置寄存器1(AFIO_EXTICR1) (62)5.4.3外部中断配置寄存器2(AFIO_EXTICR2) (62)5.4.4外部中断配置寄存器3(AFIO_EXTICR3) (63)5.4.5外部中断配置寄存器4(AFIO_EXTICR4) (63)5.5GPIO 和AFIO寄存器地址映象 (64)5.5.1GPIO寄存器地址映象 (64)5.5.2AFIO寄存器地址映象 (65)6中断和事件 (66)6.1嵌套向量中断控制器(NVIC) (66)6.1.1系统嘀嗒(SysTick)校准值寄存器 (66)6.1.2中断和异常向量 (66)6.2外部中断/事件控制器(EXTI) (68)6.2.1主要特性 (68)6.2.2框图 (69)6.2.3唤醒事件管理 (69)6.2.4功能说明 (69)6.2.5外部中断/事件线路映像 (71)6.3EXTI 寄存器描述 (72)6.3.1外部中断/事件寄存器映像 (75)7DMA 控制器(DMA) (76)7.1简介 (76)7.2主要特性 (76)7.3功能描述 (77)7.3.1DMA处理 (77)7.3.2仲裁器 (77)7.3.3DMA 通道 (78)7.3.4错误管理 (79)7.3.5DMA请求映像 (79)7.4DMA寄存器 (82)7.4.1DMA中断状态寄存器(DMA_ISR) (82)7.4.2DMA中断标志清除寄存器(DMA_IFCR) (82)7.4.3DMA通道x配置寄存器(DMA_CCRx)(x = 1...7).. (83)7.4.4DMA通道x传输数量寄存器(DMA_CNDTRx)(x = 1...7) (85)7.4.5DMA通道x外设地址寄存器(DMA_CPARx)(x = 1...7).. (85)7.4.6DMA通道x存储器地址寄存器(DMA_CPARx)(x = 1...7).. (85)7.5DMA寄存器映像 (86)8实时时钟(RTC) (88)8.1简介 (88)8.2主要特性 (88)8.3功能描述 (88)8.3.1概述 (88)8.3.2复位过程 (90)8.3.3读RTC寄存器 (90)8.3.4配置RTC寄存器 (90)8.3.5RTC标志的设置 (90)8.4RTC寄存器描述 (91)8.4.1RTC控制寄存器高位(RTC_CRH) (91)8.4.2RTC控制寄存器低位(RTC_CRL) (92)8.4.3RTC预分频装载寄存器(RTC_PRLH/RTC_PRLL) (93)8.4.4RTC预分频分频因子寄存器(RTC_DIVH / RTC_DIVL) (94)8.4.5RTC计数器寄存器 (RTC_CNTH / RTC_CNTL) (95)8.4.6RTC闹钟寄存器(RTC_ALRH/RTC_ALRL) (95)8.5RTC寄存器映像 (97)9备份寄存器(BKP) (98)9.1简介 (98)9.2特性 (98)9.3侵入检测 (98)9.4RTC校准 (98)9.5BKP寄存器描述 (99)9.5.1备份数据寄存器x(BKP_DRx) (x = 1 ... 10) (99)9.5.2RTC时钟校准寄存器(BKP_RTCCR) (99)9.5.3备份控制寄存器(BKP_CR) (99)9.5.4备份控制/状态寄存器(BKP_CSR) (100)9.6BKP寄存器映像 (101)10独立看门狗(IWDG) (103)10.1简介 (103)10.1.1硬件看门狗 (103)10.1.2寄存器访问保护 (103)10.1.3调试模式 (104)10.2IWDG寄存器描述 (104)10.2.1键寄存器(IWDG_KR) (104)10.2.2预分频寄存器(IWDG_PR) (105)10.2.3重装载寄存器(IWDG_RLR) (106)10.2.4状态寄存器(IWDG_SR) (106)10.3IWDG寄存器映像 (107)11窗口看门狗(WWDG) (108)11.1简介 (108)11.2主要特性 (108)11.3功能描述 (108)11.4如何编写看门狗超时程序 (109)11.5调试模式 (110)11.6寄存器描述 (111)11.6.1控制寄存器(WWDG_CR) (111)11.6.2配置寄存器(WWDG_CFR) (111)11.6.3状态寄存器(WWDG_SR) (112)11.7WWDG寄存器映像 (113)12高级控制定时器(TIM1) (114)12.1简介 (114)12.2主要特性 (114)12.3框图 (115)12.4功能描述 (116)12.4.1时基单元 (116)12.4.2计数器模式 (117)12.4.3重复向下计数器 (125)12.4.4时钟选择 (126)12.4.5捕获/比较通道 (129)12.4.6输入捕获模式 (131)12.4.7PWM输入模式 (132)12.4.8强置输出模式 (132)12.4.9输出比较模式 (133)12.4.10PWM 模式 (134)12.4.11互补输出和死区插入 (136)12.4.12使用刹车功能 (138)12.4.13在外部事件时清除OCxREF信号 (139)12.4.14六步PWM的产生 (140)12.4.15单脉冲模式 (141)12.4.16编码器接口模式 (143)12.4.17定时器输入异或功能 (144)12.4.18与霍尔元件的接口 (145)12.4.19定时器和外部触发的同步 (146)12.4.20定时器同步 (149)12.4.21调试模式 (149)12.5TIM1寄存器描述 (150)12.5.1控制寄存器1(TIM1_CR1) (150)12.5.2控制寄存器2(TIM1_CR2) (151)12.5.3从模式控制寄存器(TIM1_SMCR) (153)12.5.4DMA/中断使能寄存器(TIM1_DIER) (154)12.5.5状态寄存器(TIM1_SR) (156)12.5.6事件产生寄存器(TIM1_EGR) (157)12.5.7捕获/比较模式寄存器1(TIM1_CCMR1) (158)12.5.8捕获/比较模式寄存器2(TIM1_CCMR2) (161)12.5.10计数器(TIM1_CNT) (165)12.5.11预分频器(TIM1_PSC) (165)12.5.12自动重装载寄存器(TIM1_ARR) (165)12.5.13周期计数寄存器(TIM1_RCR) (166)12.5.14捕获/比较寄存器1(TIM1_CCR1) (166)12.5.15捕获/比较寄存器2(TIM1_CCR2) (167)12.5.16捕获/比较寄存器3(TIM1_CCR3) (167)12.5.17捕获/比较寄存器(TIM1_CCR4) (168)12.5.18刹车和死区寄存器(TIM1_BDTR) (168)12.5.19DMA控制寄存器(TIM1_DCR) (170)12.5.20连续模式的DMA地址(TIM1_DMAR) (170)12.6TIM1寄存器图 (171)13通用定时器(TIMx) (173)13.1概述 (173)13.2主要特性 (173)13.3框图 (174)13.4功能描述 (175)13.4.1时基单元 (175)13.4.2计数器模式 (176)13.4.3时钟选择 (183)13.4.4捕获/比较通道 (185)13.4.5输入捕获模式 (187)13.4.6PWM输入模式 (187)13.4.7强置输出模式 (188)13.4.8输出比较模式 (188)13.4.9PWM 模式 (189)13.4.10单脉冲模式 (191)13.4.11在外部事件时清除OCxREF信号 (193)13.4.12编码器接口模式 (193)13.4.13定时器输入异或功能 (195)13.4.14定时器和外部触发的同步 (195)13.4.15定时器同步 (198)13.4.16调试模式 (202)13.5TIMx寄存器描述 (203)13.5.2控制寄存器2(TIMx_CR2) (205)13.5.3从模式控制寄存器(TIMx_SMCR) (206)13.5.4DMA/中断使能寄存器(TIMx_DIER) (207)13.5.5状态寄存器(TIMx_SR) (209)13.5.6事件产生寄存器(TIMx_EGR) (211)13.5.7捕获/比较模式寄存器1(TIMx_CCMR1) (212)13.5.8捕获/比较模式寄存器2(TIMx_CCMR2) (215)13.5.9捕获/比较使能寄存器(TIMx_CCER) (216)13.5.10计数器(TIMx_CNT) (218)13.5.11预分频器(TIMx_PSC) (218)13.5.12自动重装载寄存器(TIMx_ARR) (218)13.5.13捕获/比较寄存器1(TIMx_CCR1) (219)13.5.14捕获/比较寄存器2(TIMx_CCR2) (220)13.5.15捕获/比较寄存器3(TIMx_CCR3) (220)13.5.16捕获/比较寄存器(TIMx_CCR4) (221)13.5.17DMA控制寄存器(TIMx_DCR) (221)13.5.18连续模式的DMA地址(TIMx_DMAR) (222)13.6TIMx寄存器图 (223)14控制器局域网(bxCAN) (225)14.1简介 (225)14.2主要特点 (225)14.3总体描述 (225)14.3.1CAN 2.0B内核 (226)14.3.2控制、状态和配置寄存器 (226)14.3.3发送邮箱 (226)14.3.4接收过滤器 (226)14.3.5接收FIFO (227)14.4工作模式 (228)14.4.1初始化模式 (228)14.4.2正常模式 (228)14.4.3睡眠模式(低功耗) (228)14.4.4测试模式 (229)14.4.5静默模式 (229)14.4.6环回模式 (229)14.4.7环回静默模式 (230)14.5功能描述 (230)14.5.1发送处理 (230)14.5.2时间触发通信模式 (232)14.5.3接收管理 (232)14.5.4标识符过滤 (234)14.5.5报文存储 (238)14.5.6出错管理 (239)14.5.7位时间特性 (239)14.6中断 (241)14.7寄存器访问保护 (243)14.8CAN 寄存器描述 (243)14.8.1控制和状态寄存器 (243)14.8.2邮箱寄存器 (255)14.8.3CAN过滤器寄存器 (260)14.9bxCAN寄存器列表 (264)15I2C接口 (267)15.1介绍 (267)15.2主要特点 (267)15.3概述 (268)15.4功能描述 (269)15.4.1I2C从模式 (269)15.4.2I2C主模式 (271)15.4.3错误条件 (274)15.4.4SDA/SCL线控制 (275)15.4.5SMBus (275)15.4.6DMA请求 (277)15.4.7包错误校验(PEC) (278)15.5中断请求 (279)15.6I2C寄存器描述 (281)15.6.1控制寄存器1(I2C_CR1) (281)15.6.2控制寄存器2(I2C_CR2) (283)15.6.3自身地址寄存器1 (I2C_OAR1) (284)15.6.4自身地址寄存器2(I2C_OAR2) (285)15.6.5数据寄存器(I2C_DR) (285)15.6.6状态寄存器1(I2C_SR1) (285)15.6.7状态寄存器2 (I2C_SR2) (288)15.6.8时钟控制寄存器(I2C_CCR) (289)15.6.9TRISE寄存器(I2C_TRISE) (290)15.7I2C寄存器地址映象 (291)16串行外设接口(SPI) (292)16.1简介 (292)16.2主要特征 (292)16.3功能描述 (292)16.3.1概述 (292)16.3.2SPI从模式 (295)16.3.3SPI主模式 (296)16.3.4单向通信 (297)16.3.5状态标志 (297)16.3.6CRC计算 (298)16.3.7利用DMA的SPI通信 (299)16.3.8错误标志 (299)16.3.9中断 (300)16.4SPI寄存器描述 (300)16.4.1SPI控制寄存器1(SPI_CR1) (300)16.4.2SPI控制寄存器2(SPI_CR2) (302)16.4.3SPI 状态寄存器(SPI_SR) (303)16.4.4SPI 数据寄存器(SPI_DR) (304)16.4.5SPI CRC多项式寄存器(SPI_CRCPR) (304)16.4.6SPI Rx CRC寄存器(SPI_RXCRCR) (305)16.4.7SPI Tx CRC寄存器(SPI_TXCRCR) (305)16.5SPI 寄存器地址映象 (306)17USART收发器(USART) (307)17.1介绍 (307)17.2概述 (308)17.2.1框图 (309)17.2.2USART 特征描述 (310)17.2.3发送器 (310)17.2.4接收器 (312)17.2.5分数波特率的产生 (315)17.2.617.2.6 多处理器通信 (316)17.2.7校验控制 (317)17.2.8LIN(局域互联网)模式 (318)17.2.9USART 同步模式 (320)17.2.10单线半双工通信 (322)17.2.11智能卡 (322)17.2.12IrDA SIR ENDEC 功能块 (324)17.2.13利用DMA连续通信 (325)17.2.14硬件流控制 (326)17.3中断请求 (327)17.4USART寄存器描述 (329)17.4.1状态寄存器(USART_SR) (329)17.4.2数据寄存器(USART_DR) (330)17.4.3波特比率寄存器(USART_BRR) (331)17.4.4控制寄存器1 (USART_CR1) (331)17.4.5控制寄存器2(USART_CR2) (333)17.4.6控制寄存器3(USART_CR3) (335)17.4.7保护时间和预分频寄存器(USART_GTPR) (336)17.5USART寄存器地址映象 (338)18USB全速设备接口(USB) (339)18.1导言 (339)18.2主要特征 (339)18.3方框图 (339)18.4功能描述 (340)18.4.1USB功能模块描述 (341)18.5编程中需要考虑的问题 (342)18.5.1通用USB设备编程 (342)18.5.2系统复位和上电复位 (342)18.5.3双缓冲端点 (346)18.5.4同步传输 (347)18.5.5挂起/恢复事件 (348)18.6USB寄存器描述 (350)18.6.1通用寄存器 (350)18.6.2端点寄存器 (355)18.6.3缓冲区描述表 (358)18.7USB寄存器映像 (361)19模拟/数字转换(ADC) (363)19.1介绍 (363)19.2主要特征 (363)19.3引脚描述 (365)19.4功能描述 (365)19.4.1ADC开关控制 (365)19.4.2ADC时钟 (365)19.4.3通道选择 (365)19.4.4单次转换模式 (366)19.4.5连续转换模式 (366)19.4.6时序图 (367)19.4.7模拟看门狗 (368)19.4.8扫描模式 (368)19.4.9注入通道管理 (369)19.4.10间断模式 (369)19.5校准 (370)19.6数据对齐 (371)19.7可编程的通道采样时间 (371)19.8外部触发转换 (371)19.9DMA请求 (372)19.10双ADC模式 (372)19.10.1同时注入模式 (374)19.10.2同时规则模式 (374)19.10.3快速交替模式 (375)19.10.4慢速交替模式 (375)19.10.5交替触发模式 (376)19.10.6独立模式 (377)19.10.7混合的规则/注入同步模式 (377)19.10.8混合的同步规则+交替触发模式 (377)19.10.9混合同步注入+交替模式 (378)19.11温度传感器 (378)19.12中断 (379)19.13ADC寄存器描述 (381)19.13.1ADC状态寄存器(ADC_SR) (381)19.13.2ADC控制寄存器1(ADC_CR1) (382)19.13.3ADC控制寄存器2(ADC_CR2) (384)19.13.4ADC采样时间寄存器1(ADC_SMPR1) (387)19.13.5ADC采样时间寄存器2(ADC_SMPR2) (387)19.13.6ADC注入通道数据偏移寄存器x (ADC_JOFRx)(x=1..4) (388)19.13.7ADC看门狗高阀值寄存器(ADC_HTR) (388)19.13.8ADC看门狗低阀值寄存器(ADC_LRT) (388)19.13.9ADC规则序列寄存器1(ADC_SQR1) (390)19.13.10ADC规则序列寄存器2(ADC_SQR2) (390)19.13.11ADC规则序列寄存器3(ADC_SQR3) (391)19.13.12ADC注入序列寄存器(ADC_JSQR) (391)19.13.13ADC 注入数据寄存器x (ADC_JDRx) (x= 1..4) (392)19.13.14ADC规则数据寄存器(ADC_DR) (392)19.14ADC寄存器地址映像 (394)20调试支持(DBG) (396)20.1概况 (396)20.2ARM参考文献 (397)20.3SWJ调试端口(serial wire and JTAG) (397)20.3.1JTAG-DP和SW-DP切换的机制 (397)20.4引脚分布和调试端口脚 (398)20.4.1SWJ调试端口脚 (398)20.4.2灵活的SWJ-DP脚分配 (398)20.4.3JTAG脚上的内部上拉和下拉 (399)20.4.4利用串行接口并释放不用的调试脚作为普通I/O口 (400)20.5STM32F10x JTAG TAP 连接 (400)20.6ID 代码和锁定机制 (401)20.6.1MCU DEVICE ID编码 (401)20.6.2TMC TAP (401)20.6.3Cortex-M3 TAP (401)20.6.4Cortex-M3 JEDEC-106 ID代码 (401)20.7JTAG调试端口 (402)20.8SW调试端口 (403)20.8.1SW协议介绍 (403)20.8.2SW协议序列 (403)20.8.3SW-DP状态机(Reset, idle states, ID code) (404)20.8.4DP和AP读/写访问 (404)20.8.5SW-DP寄存器 (405)20.8.6SW-AP寄存器 (405)20.9对于JTAG-DP或SWDP都有效的AHB-AP (AHB 访问端口) (405)20.10内核调试 (406)20.11调试器主机在系统复位下的连接能力 (407)20.12FPB (Flash patch breakpoint) (407)20.13DWT(data watchpoint trigger) (407)20.14ITM (instrumentation trace macrocell) (408)20.14.1概述 (408)20.14.2时间戳包,同步和溢出包 (408)20.15MCU调试模块(MCUDBG) (409)20.15.1低功耗模式的调试支持 (409)20.15.2支持定时器和看门狗和bxCAN的调试 (409)20.15.3调试MCU配置寄存器 (410)20.16TPIU (trace port interface unit) (411)20.16.1导言 (411)20.16.2跟踪引脚分配 (412)20.16.3TPUI格式器 (414)20.16.4TPUI帧异步包 (414)20.16.5同步帧包的发送 (415)20.16.6同步模式 (415)20.16.7异步模式 (415)20.16.8TRACECLKIN在STM32F10x内部的连接 (415)20.16.9TPIU寄存器 (416)20.16.10配置的例子 (416)20.17DBG寄存器地址映象 (417)STM32F10x参考手册第一版文档中的约定1 文档中的约定1.1 寄存器描述中使用的缩写列表在对寄存器的描述中使用了下列缩写:read / write (rw) 软件能读写此位。
STM32F10x参考手册参考手册参考手册参考手册
关于如何进入停止模式,详见表 3-4。 在停止模式下,通过设置电源控制寄存器(PWR_CR)的 LPDS 位使内部调节器进入低功耗 模式,能够降低更多的功耗。
如果正在进行 Flash 编程,直到对内存访问完成,系统才进入停止模式。 如果正在进行对 APB 的访问,直到对 APB 访问完成,系统才进入停止模式。 可以通过对独立的控制位进行编程,可选择以下功能:
表3-4 停止模式
进入
退出 唤醒延时
在以下条件下执行WFI或WFE指令: – 设置Cortex-M3系统控制寄存器中的SLEEPDEEP位 – 清除电源控制寄存器(PWR_CR)中的PDDS位 – 通过设置PWR_CR中LPDS位选择电压调节器的模式 注:为了进入停止模式,所有的外部中断的请求位(挂起寄存器(EXTI_PR))和RTC的闹 钟标志都必须被清除,否则停止模式的进入流程将会被跳过,程序继续运行。
STM32F10x 参考手册
第一版
电源控制(PWR)
3 电源控制(PWR)
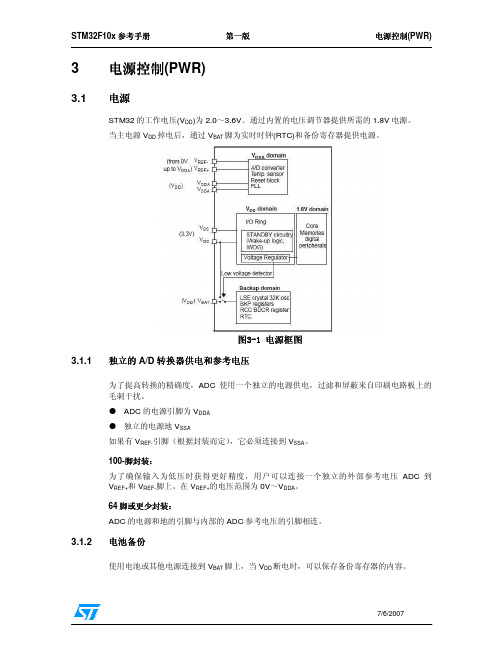
3.1 电源
STM32 的工作电压(VDD)为 2.0~3.6V。通过内置的电压调节器提供所需的 1.8V 电源。 当主电源 VDD 掉电后,通过 VBAT 脚为实时时钟(RTC)和备份寄存器提供电源。
3.1.1
图3-1 电源框图 独立的 A/D 转换器供电和参考电压
如果应用中没有使用外部电池,VBAT 必须连接到 VDD 引脚上。
注意:在 VDD 上升阶段(tRSTTEMPO),VBAT 和 VDD 之间的电源开关仍会保持连接在 VBAT。当 VDD 快速上升且达 到稳定状态,当 VBAT 低于 VDD−0.6V 时,电流通过 VDD 和 VBAT 之间的二极管流入到 VBAT。关于 tRSTTEMPO 可参考数据手册中的相关部分。
stm32f1的基本架构

stm32f1的基本架构STM32F1是意法半导体(STMicroelectronics)推出的一款32位单片机系列,采用ARM Cortex-M3内核。
本文将从基本架构的角度介绍STM32F1系列的特点和功能。
STM32F1系列的基本架构主要包括处理器内核、存储器和外设。
首先是处理器内核,STM32F1采用了ARM Cortex-M3内核,这是一款高性能、低功耗的32位处理器。
它具有高性能的指令集和丰富的调试和优化机制,能够满足复杂应用的需求。
其次是存储器,STM32F1系列包括闪存和SRAM。
闪存用于存储程序代码和常量数据,具有快速的访问速度和较大的存储容量。
SRAM用于存储变量数据和堆栈,可以在程序运行时动态分配和释放内存。
同时,STM32F1还支持外部存储器接口,可以通过外部存储器扩展系统的存储容量。
除了处理器内核和存储器,STM32F1还具有丰富的外设接口,包括通用输入输出(GPIO)、模拟数字转换器(ADC)、定时器(Timer)、串行通信接口(USART、SPI、I2C)等。
GPIO接口提供了灵活的通用输入输出功能,可以连接各种外设和传感器。
ADC接口可以将模拟信号转换为数字信号,用于采集和处理模拟数据。
定时器接口提供了精确的定时和计数功能,可以用于生成各种时序信号。
串行通信接口支持多种通信协议,可以连接外部设备进行数据交换。
STM32F1还具有多种功耗管理功能,如低功耗模式、时钟管理和电源管理等。
低功耗模式可以使系统在闲置或待机时降低功耗,延长电池寿命。
时钟管理功能可以灵活配置系统时钟源和频率,满足不同应用的需求。
电源管理功能可以监测和控制系统的供电电压,保证系统的稳定运行。
STM32F1系列单片机具有强大的处理能力、丰富的外设接口和灵活的功耗管理功能,适用于各种应用场景。
无论是工业控制、智能家居还是消费电子产品,STM32F1都能提供可靠的解决方案。
未来,随着技术的不断创新和发展,STM32F1系列还将不断推出新的产品和功能,为用户提供更多选择和可能性。
无线运动传感器节点设计

0引言可穿戴设备是近年新兴的智能产品。
智能可穿戴产品多与手机客户端结合使用,最常见的有智能手环、智能手表和智能眼镜等。
可穿戴设备在技术、用户、产业的推动下快速发展,吸引了越来越多的大众群体[1]。
智能手环的设计中运动信息主要通过加速度传感器采集,而目前的加速度传感器所采集到的X 轴、Y 轴、Z 轴数据,其时序特点和目前市面上处理语音识别的信号具有相同的方式,或者说是由语音识别处理的信号发展而来的[2]。
SAUNDERS [3]在1953年第一次用加速度传感器辨识人体的运动动作,但技术成熟度不高,加速度传感器无法集成传感器芯片,体积庞大且价格较高,因此没有得到推广使用。
三轴加速度传感器集成一个芯片后,采集了大量的人体活动作为研究样本,通过数据计算出身体消耗的卡路里和步数等信息[4]。
智能手环的不断发展促进了低成本、低功耗、多功能无线传感器的发展[5]。
这些无线传感器体积越来越小,并且具有感知人体信息、处理数据和短距离通信的能力。
基于以往的研究基础,在心电传感器、体表温度传感器和三轴传感器技术成熟的情况下,本文提出了无线运动传感器节点设计。
该设计通过STM32单片机对传感器进行组合,监测人体的身体状态,通过无线网络上传运动后的距离和步数,记录运动时人体的心电图、心率变化和体表温度,并且能够穿戴在人体上实现各项指标监测功能。
1无线运动传感器节点设计方案及配置选择1.1设计方案本设计采用的方案如下:使用STM32单片机为控制核心,通过控制ADS1292心电模块采集使用者的心电数据,通过串口向串口屏发送心电数据并计算心率;使用HMI 串口屏上位机软件显示GUI 界面,加入控件,通过控制DS18B20温度传感器采集使用者的体表温度;通过ADXL345加速度传感器采集使用者的三轴数据,计算使用者的步数和运动距离;把采集到的数据分别发送到HMI 串口屏的控件上,再通过串口将这些数据通过ESP8266WIFI 模块发送到PC 端;使用QT 开发软件设计PC 端的GUI 界面,通过接收到的数据,在PC 端界面显示出使用者的心电图波形、心率、体表温度、三轴数据、步数和运动距离。
STM32F1系列之常用外设说明

1、RCC相关:APB2启动时钟项:RCC_APB2Periph_AFIO, RCC_APB2Periph_GPIOA,RCC_APB2Periph_GPIOB,RCC_APB2Periph_GPIOC, RCC_APB2Periph_GPIOD, RCC_APB2Periph_GPIOE,RCC_APB2Periph_GPIOF, RCC_APB2Periph_GPIOG, RCC_APB2Periph_ADC1,RCC_APB2Periph_ADC2, RCC_APB2Periph_TIM1, RCC_APB2Periph_SPI1,RCC_APB2Periph_TIM8, RCC_APB2Periph_USART1, RCC_APB2Periph_ADC3,RCC_APB2Periph_ALLAPB2启动函数:RCC_APB2PeriphClockCmd(XX,ENABLE);APB1启动时钟项:RCC_APB1Periph_TIM2, RCC_APB1Periph_TIM3,RCC_APB1Periph_TIM4,RCC_APB1Periph_TIM5, RCC_APB1Periph_TIM6, RCC_APB1Periph_TIM7,RCC_APB1Periph_WWDG, RCC_APB1Periph_SPI2, RCC_APB1Periph_SPI3,RCC_APB1Periph_USART2,RCC_APB1Periph_USART3, RCC_APB1Periph_USART4,RCC_APB1Periph_USART5, RCC_APB1Periph_I2C1, RCC_APB1Periph_I2C2,RCC_APB1Periph_USB, RCC_APB1Periph_CAN1, RCC_APB1Periph_BKP,RCC_APB1Periph_PWR, RCC_APB1Periph_DAC, RCC_APB1Periph_ALLAPB1启动函数:RCC_APB2PeriphClockCmd(XX,ENABLE);AHB启动时钟项:RCC_AHBPeriph_DMA1RCC_AHBPeriph_DMA2RCC_AHBPeriph_SRAMRCC_AHBPeriph_FLITFRCC_AHBPeriph_CRCRCC_AHBPeriph_FSMCRCC_AHBPeriph_SDIOAHB启动函数:RCC_AHBPeriphClockCmd (XX,ENABLE);2、GPIO相关:GPIO模式:GPIO_Mode_AIN:模拟输入GPIO_Mode_IN_FLOATING:浮空输入GPIO_Mode_IPD:下拉输入GPIO_Mode_IPU:上拉输入GPIO_Mode_Out_OD:开漏输出GPIO_Mode_Out_PP:推挽输出GPIO_Mode_AF_OD:复用开漏输出GPIO_Mode_AF_PP:复用推挽输出GPIO速度:GPIO_Speed_2MHzGPIO_Speed_10MHzGPIO_Speed_50MHzGPIO引脚声明:GPIO_InitStructure.GPIO_Pin = GPIO_Pin_x; x:1~15或者allGPIO初始化函数:GPIO_Init(GPIOx, &GPIO_InitStructure); x:A~G注:需要定义GPIO结构体变量,GPIO_InitTypeDef GPIO_InitStructure;3、ADC相关最好需要重新初始化:ADC_DeInit(ADCx);ADC工作模式选择:ADC_Mode_Independent:独立工作ADC_Mode_RegInjecSimult:混合同步+注入同步ADC_Mode_RegSimult_AlterTrig:混合同步+交替触发ADC_Mode_InjecSimult_FastInterl:混合同步+快速交替ADC_Mode_InjecSimult_SlowInterl:混合同步+慢速交替ADC_Mode_InjecSimult:注入同步ADC_Mode_RegSimult:规则同步ADC_Mode_FastInterl:快速交替ADC_Mode_SlowInterl:慢速交替ADC_Mode_AlterTrig:交替触发通过ADC_InitStructure.ADC_Mode = XX进行赋值ADC扫描使能:ADC_InitStructure.ADC_ScanConvMode = ENABLE;ADC连续 /单次模式选择:ADC_InitStructure.ADC_ContinuousConvMode = ENABLE;ADC转换控制方式:ADC_InitStructure.ADC_ExternalTrigConv =ADC_ExternalTrigConv_None;//有软件控制转换ADC数据对齐方式:ADC_DataAlign_Right:右对齐 / ADC_DataAlign_Right:左对齐ADC_InitStructure.ADC_DataAlign =XXADC转换通道数:ADC_InitStructure.ADC_NbrOfChannel =X // X=1~16ADC初始化函数:ADC_Init(ADCx, &ADC_InitStructure);注:在开始要定义结构体变量ADC_InitTypeDef ADC_InitStructure是否使能ADCx DMA :ADC_DMACmd(ADCx, ENABLE);使能ADCx:ADC_Cmd(ADCx, ENABLE);初始化ADC1校准寄存器:ADC_ResetCalibration(ADCx);检测ADC1校准寄存器初始化是否完成:while(ADC_GetResetCalibrationStatus(ADCx)); 开始校准ADC1:ADC_StartCalibration(ADCx);检测是否完成校准:while(ADC_GetCalibrationStatus(ADCx));ADC1转换软件启动:ADC_SoftwareStartConvCmd(ADCx, ENABLE);4、DMA相关:复位通道:DMA_DeInit(DMAy_Channelx);//复位DMAy通道x,y=1时,x=1~7;y=2时,x=1~5定义外设基地址,全局变量:DMA_InitStructure.DMA_PeripheralBase Addr = ADC1_DR_Address;//地址自己定义如:#define ADC1_DR_Address ((u32)0x4001244C)定义DMA存储器地址,全局变量u32DMA_InitStructure.DMA_MemoryBaseA ddr = (u32)&ADC_ConvertedValue; //定义DMA通道存储器地址如:volatile unsigned short int ADC_ConvertedValue[8];DMA外设方向:DMA_InitStructure.DMA_DIR = XX;DMA_DIR_PeripheralSRC:外设为数据传输的来源,DMA_DIR_PeripheralDST:外设为数据传输的目的地DMA传输数量寄存器值,即缓存大小,单位由MemoryDataSize或PeripheralDataSize决定:DMA_InitStructure.DMA_BufferSize = x;//定义DMA缓冲区大小x,如8通道ADC,则x就为8DMA外设地址寄存器变不变:DMA_InitStructure.DMA_PeripheralInc = x;DMA_PeripheralInc_Disable:外设地址寄存器不变 DMA_PeripheralInc_Enable:外设地址寄存器递增DMA内存地址寄存器变不变:DMA_InitStructure.DMA_MemoryInc = X; DMA_MemoryInc_Disable:内存地址寄存器不变 DMA_MemoryInc_Enable:内存地址寄存器递增外设数据宽度:DMA_InitStructure.DMA_PeripheralData Size = X;DMA_PeripheralDataSize_Byte 数据宽度为8位DMA_PeripheralDataSize_Byte 数据宽度为8位DMA_PeripheralDataSize_HalfWord 数据宽度为16位DMA_PeripheralDataSize_Word 数据宽度为32位存储器数据宽度:DMA_InitStructure.DMA_MemoryDataSize = X; DMA_MemoryDataSize_Byte 数据宽度为8位DMA_MemoryDataSize_HalfWord 数据宽度为16位DMA_MemoryDataSize_Word 数据宽度为32位模式选择:DMA_InitStructure.DMA_Mode =x;DMA_Mode_Circular: 循环模式DMA_Mode_Normal:正常模式通道软件优先级设置:DMA_InitStructure.DMA_Priority =x;DMA_Priority_VeryHigh 最高优先级DMA_Priority_High 高优先级DMA_Priority_Medium 中优先级DMA_Priority_Low 低优先级DMA内存到内存的传输使能:DMA_InitStructure.DMA_M2M = xDMA_M2M_Enable:使能DMA_M2M_Disable:未使能DMA初始化函数:DMA_Init(DMAy_Channelx , &DMA_InitStructure); DMA通道使能函数:DMA_Cmd(DMAy_Channelx , ENABLE); //使能DMA通道1注:在开始要定义结构体变量DMA_InitTypeDef DMA_InitStructure5、NVIC相关:优先级组设定:NVIC_PriorityGroupConfig(NVIC_PriorityGroup_x);NVIC_PriorityGroup_0: 0 bits for pre-emption priority4 bits for subpriorityNVIC_PriorityGroup_1: 1 bits for pre-emption priority3 bits for subpriorityNVIC_PriorityGroup_2: 2 bits for pre-emption priority2 bits for subpriorityNVIC_PriorityGroup_3: 3 bits for pre-emption priority1 bits for subpriorityNVIC_PriorityGroup_4: 4 bits for pre-emption priority0 bits for subpriority设置中断:NVIC_InitStructure.NVIC_IRQChannel =x;ADC1_2_IRQn = 18, /*!< ADC1 and ADC2 global Interrupt*/USB_HP_CAN1_TX_IRQn = 19, /*!< USB Device High Priority or CAN1 TX Interrupts */USB_LP_CAN1_RX0_IRQn = 20, /*!< USB Device Low Priority or CAN1 RX0 Interrupts */CAN1_RX1_IRQn = 21, /*!< CAN1 RX1 Interrupt*/ CAN1_SCE_IRQn = 22, /*!<="" p="">EXTI9_5_IRQn = 23, /*!< External Line[9:5] Interrupts*/TIM1_BRK_IRQn = 24, /*!< TIM1 Break Interrupt*/TIM1_UP_IRQn = 25, /*!< TIM1 Update Interrupt*/ TIM1_TRG_COM_IRQn = 26, /*!< TIM1 Trigger and Commutation Interrupt*/TIM1_CC_IRQn = 27, /*!< TIM1 Capture Compare Interrupt*/TIM2_IRQn = 28, /*!< TIM2 global Interrupt */ TIM3_IRQn = 29, /*!< TIM3 global Interrupt */ TIM4_IRQn = 30, /*!< TIM4 global Interrupt*/ I2C1_EV_IRQn = 31, /*!< I2C1 Event Interrupt*/I2C1_ER_IRQn = 32, /*!< I2C1 Error Interrupt*/I2C2_EV_IRQn = 33, /*!< I2C2 Event Interrupt */I2C2_ER_IRQn = 34, /*!< I2C2 Error Interrupt */ SPI1_IRQn = 35, /*!< SPI1 global Interrupt*/ SPI2_IRQn = 36, /*!< SPI2 global Interrupt*/ USART1_IRQn = 37, /*!< USART1 global Interrupt*/USART2_IRQn = 38, /*!< USART2 global Interrupt*/USART3_IRQn = 39, /*!< USART3 global Interrupt*/ EXTI15_10_IRQn = 40, /*!< External Line[15:10] Interrupts*/RTCAlarm_IRQn = 41, /*!< RTC Alarm through EXTI Line Interrupt*/USBWakeUp_IRQn = 42, /*!< USB Device WakeUp from suspend through EXTI Line Interrupt */TIM8_BRK_IRQn = 43, /*!< TIM8 Break Interrupt */ TIM8_UP_IRQn = 44, /*!< TIM8 Update Interrupt\*/ TIM8_TRG_COM_IRQn = 45, /*!< TIM8 Trigger and Commutation InterruptTIM8_CC_IRQn = 46, /*!< TIM8 Capture Compare Interrupt*/ADC3_IRQn = 47, /*!< ADC3 global Interrupt*/ FSMC_IRQn = 48, /*!< FSMC global Interrupt */ SDIO_IRQn = 49, /*!< SDIO global Interrupt\*/ TIM5_IRQn = 50, /*!< TIM5 global Interrupt*/ SPI3_IRQn = 51, /*!< SPI3 global Interrupt*/ UART4_IRQn = 52, /*!< UART4 global Interrupt */UART5_IRQn = 53, /*!< UART5 global Interrupt */TIM6_IRQn = 54, /*!< TIM6 global Interrupt */TIM7_IRQn = 55, /*!< TIM7 global Interrupt */DMA2_Channel1_IRQn = 56, /*!< DMA2 Channel 1 global Interrupt*/DMA2_Channel2_IRQn = 57, /*!< DMA2 Channel 2 global Interrupt */DMA2_Channel3_IRQn = 58, /*!< DMA2 Channel 3 global Interrupt*/DMA2_Channel4_5_IRQn = 59, /*!< DMA2 Channel 4 and Channel 5 global Interrupt*/设置抢占优先级:NVIC_InitStructure.NVIC_IRQChannelPreemptionPri ority =X; //抢占优先级 X设置子优先级为:NVIC_InitStructure.NVIC_IRQChannelSubPriority=X; //抢占优先级 X使能中断:NVIC_InitStructure.NVIC_IRQChannelCmd =ENABLE; //使能NVIC初始化函数:NVIC_Init(&NVIC_InitStructure);注:在开始时需要定义结构体变量NVIC_InitTypeDef NVIC_InitStructure;6、USART相关:USART波特率选择:USART_ART_BaudRate=XX; //波特率为XX bps数据位位数选择:USART_ART_WordLength = USART_WordLength_Xb;//X为8或者9,即8位或者9位数据位停止位位数选择:USART_ART_StopBits =USART_StopBits_1; //停止位1位#define USART_StopBits_1 ((uint16_t)0x0000) #define USART_StopBits_0_5 ((uint16_t)0x1000)#define USART_StopBits_2 ((uint16_t)0x2000)#define USART_StopBits_1_5 ((uint16_t)0x3000)有无校验位选择:USART_ART_Parity =USART_Parity_No; //无校验位#define USART_Parity_No ((uint16_t)0x0000)#define USART_Parity_Even ((uint16_t)0x0400)#define USART_Parity_Odd ((uint16_t)0x0600)有无硬件流控选择:USART_ART_HardwareFlowControl = USART_HardwareFlowControl_None;//无硬件流控#defineUSART_HardwareFlowControl_None ((uint16_t)0x0000)#defineUSART_HardwareFlowControl_RTS ((uint16_t)0x0100)#defineUSART_HardwareFlowControl_CTS ((uint16_t)0x0200)#defineUSART_HardwareFlowControl_RTS_CTS ((uint16_t)0x0300)模式选择:USART_ART_Mode =USART_Mode_Rx | USART_Mode_Tx; //收发模式#define USART_Mode_Rx ((uint16_t)0x0004) #define USART_Mode_Tx ((uint16_t)0x0008)配置串口参数函数:USART_Init(USARTx, &USART_InitStructure); USARTx 可选:USART1, USART2, USART3, UART4 or UART5注:在开始时需要定义结构体变量USART_InitTypeDef USART_InitStruct;使能接收中断:USART_ITConfig(USARTx, USART_IT_RXNE, ENABLE);使能发送缓冲空中断:USART_ITConfig(USARTx, USART_IT_TXE, ENABLE);使能发送完成中断:USART_ITConfig(USARTx, USART_IT_TC, ENABLE)使能USART:USART_Cmd(USARTx, ENABLE);。