蓝宙电子捕食者摄像头转接板(数字)原理图_V3.0
DMK 33UX264 相机技术手册说明书

技术细节1.要件速览 42.尺寸图 6 2.1DMK 33UX264 带脚架适配器的C型接口 (6)2.2DMK 33UX264 不带脚架适配器的C型接口 (7)2.3DMK 33UX264 带脚架适配器的CS型接口 (8)2.4DMK 33UX264 不带脚架适配器的CS型接口 (9)3.I/O 连接器 10 3.112-pin I/O 连接器 (10)3.1.1TRIGGER_IN (11)3.1.2STROBE_OUT (11)4.光谱特征 124.1光谱灵敏度 - IMX264LLR-C (12)5.相机控制 13 5.1传感器读出控制 (13)5.1.1像素格式 (13)5.1.1.18-Bit Monochrome (13)16-Bit Monochrome (13)5.1.1.25.1.2分辨率 (14)5.1.3读出模式 (14)5.1.4帧速率 (15)5.1.5局部扫描偏移 (16)5.1.6图像翻转 (17)5.2图像传感器控制 (17)5.2.1曝光时间 (17)5.2.2增益 (18)5.2.3黑电平 (18)5.3自动曝光及增益控制 (18)5.3.1自动曝光 (19)5.3.2自动增益 (19)5.3.3自动参考值 (19)5.3.4强光缩减 (20)5.3.5自动曝光限制 (20)5.3.6自动增益限制 (21)5.4触发 (22)5.4.1触发模式 (22)5.4.2触发极性 (22)5.4.3软件触发 (22)5.4.4触发曝光模式 (23)5.4.5触发脉冲计数 (23)5.4.6触发源 (23)5.4.7触发重叠 (24)5.4.8IM X低延迟模式 (24)5.5触发定时参数 (24)5.5.1触发延迟 (24)5.5.2触发去抖时间 (25)5.5.3触发遮罩时间 (25)5.5.4触发噪声抑制时间 (25)5.6数字I/O (26)5.6.1通用输入 (26)5.6.2通用输出 (26)5.7频闪 (27)5.7.1频闪启用 (27)5.7.2频闪极性 (27)5.7.3频闪操作 (28)5.7.4频闪时间 (28)5.7.5頻閃延遲 (28)5.8图像处理 (28)伽玛 (29)5.8.15.8.2查找表 (29)5.9自动功能感兴趣的区域 (30)5.9.1自动功能ROI启用 (30)5.9.2自动功能ROI预设 (30)5.9.3自动功能ROI自定义矩形 (31)5.10用户设置 (32)5.10.1用户设置选择器 (32)5.10.2加载用户设置 (32)5.10.3保存用户设置 (33)5.10.4默认用户配置 (33)5.11多帧输出模式启用 (33)5.11.1多帧输出模式启用 (33)5.11.2多帧输出模式帧计数 (34)5.11.3多帧输出模式曝光时间 (34)5.11.4多帧输出模式自定义增益 (34)5.11.5多帧输出模式增益 (34)6.R ev i s i o n H i story 361要件速览2尺寸图2.1DMK 33UX264 带脚架适配器的C型接口2.4DMK 33UX264 不带脚架适配器的CS型接口3I/O 连接器3.112-pin I/O 连接器相机后视图1开极闸M O S FET最大限制0.2A(I D)!2启动电流最低条件3.5 m A!3G:地O:输出 I:输入3.1.1T RI GGE R_I NTRIGGER_IN线可用于将曝光时间的开始与外部事件同步。
ZXDU64_S601&T601(V4.0)_24V&50A系列组合电源用户手册
自所有者的商标或商名。在未经中兴通讯或第三方商标或商名所有者事先书面同意的情
况下,本手册不以任何方式授予阅读者任何使用本手册上出现的任何标记的许可或权
利。
本产品符合关于环境保护和人身安全方面的设计要求,产品的存放、使用和弃置应 遵照产品手册、相关合同或相关国法律、法规的要求进行。
由于产品和技术的不断更新、完善,本资料中的内容可能与实际产品不完全相符, 敬请谅解。如需查询产品的更新情况,请联系当地办事处。
资料名称
ZXDU64 S601/T601(V4.0)24V/50A 系列组合电源用户手册
产品版本
V4.0
您单位安装该设备的时间
资料版本
20060418-R1.0
为了能够及时与您联系,请填写以下有关您的信息
姓名
单位名称
邮编
单位地址
电话
好
较好
一般
较差
差
总体满意
工作指导
您对本资料 的评价
查阅方便 内容正确 内容完整
请在安装、操作和维护前仔细阅读以上手册,并注意设备上的各种警示牌及警示 语句。所有的随机资料阅读完毕后请妥善保存,以便日后查阅。
内容介绍
章次 第 1 章 安全说明
第 2 章 概述 第 3 章 结构和原理
内容介绍 本章介绍电源设备的安全符号,以及在电源设备的安装、维护及 操作过程中所应遵守的部分安全事项 本章介绍 ZXDU64 S601/T601 系统的应用领域、主要特点以及技 术规格 本章介绍 ZXDU64 S601/T601 系统的结构和工作原理
本附录介绍系统的监控组网方式
本附录列出系统可检测到的 30 种故障类型,并具体说明每一种故 障类型的含义
单片机控制摄像头摄像、显示系统111

单片机控制摄像头摄像、显示系统1111 单片机控制摄像头摄像、显示系统系别尚德光伏学院专业微电子技术班级 0801 学生姓名丁良林学号 100080253 指导教师陆亚青 2011年 4 月无锡科技职业学院毕业设计论文单片机控制摄像头摄像、显示系统 1 单片机控制摄像头摄像、显示系统摘要本项目主要是通过是S12XS128单片机来控制摄像头的正常工作并由该单片机送到电脑上。
其实很简单就是通过单片机来控制摄像头来拍照然后单片机再将拍摄到的图片传输到电脑上显示让人眼能看到所拍摄的画面。
所选的MC9S12XS128 单片机产品满足了用户对设计灵活性和平台兼容性的需求并在一系列汽车电子平台上实现了可升级性、硬件和软件可重用性、以及兼容性。
它为用户削减了成本并缩小了封装尺寸。
该项目在很多领域都有广泛的应用例如大学生智能车制作和监控系统。
例外选的OV7620是一款CMOS摄像头器件是一款彩色CMOS 型图像采集集成芯片提供高性能的单一小体积封装该器件分辨率可以达到640X480传输速率可以达到30帧。
关键词MC9S12XS128单片机OV7620摄像头显示系统无锡科技职业学院毕业设计论文单片机控制摄像头摄像、显示系统 2 abstract Abstractthis project mainly through is S12XS128 single shipcontrolling of the camera normal work and by the single-chip microcomputer to computer. Actually very simple is through the single ship controlling camera to take photos and then again to photograph of single-chip computer images transmitted to display on let the human eye can see the picture taken. Selected MC9S12XS128 microcontroller products meet the user to design flexibility and platform compatibility needs and in a series of automobile electronic platform achieved scalability the hardware and software reusability and compatibility. It for the user cut costs and reduce the encapsulation size. This project in many fields are widely used such as college students intelligent car production and monitoring system. Exception chosen OV7620 is a section CMOS camera device is a new color CMOS type image acquisition integrated chips to supply high-performance single small volume encapsulation this device resolution can achieve 640X480 transmission rate can reach 30 frames. Key wordsMC9S12XS128 microcontroller OV7620 cameras the display system. 无锡科技职业学院毕业设计论文单片机控制摄像头摄像、显示系统 3 目录前言 ................................................................. .................................................................................. 1 第一章系统的结构和功能现象 ................................................................. .................................... 1 11 系统的总体结构 ................................................................. ............................................ 1 1.2功能及现象 ................................................................. ....................................................... 2 第二章飞思卡尔XS128单片机介绍 ..................................................................... ........................ 1 2.1 XS128特性与封装 ................................................................. ........................................... 1 2.2单片机和相关引脚介绍 ..................................................................... ............................... 3 第三章OV7620摄像头 ..................................................................... ...............................................1 3.1 OV7620各模块介绍 ................................................................. ......................................... 1 3.1.2本摄像头模块新增特点 ..................................................................... ....................... 1 第四章单片机的连接与编程 ..................................................................... .................................... 2 4.1XS128最小系统 ..................................................................... ...........................................2 4.2 XS128与OV7620的硬件连接 ................................................................. ......................... 2 4.3 MC9S12XS128最小系统测试程序 ..................................................................... ............... 1 4.4 摄像头摄像及PC显示程序 ..................................................................... ........................ 2 总结 ..................................................................... .............................................................................. 2 致谢 ................................................................. .................................................................................. 1 参考文献 ................................................................. ........................................................................ ..1 附录 ................................................................. ................................................................................ 2 无锡科技职业学院毕业设计论文单片机控制摄像头摄像、显示系统 1 前言我们本次设计主要功能是用MC9S12XS128单片机来控制摄像头OV7620的正常工作并且在电脑上显示接受的图像和数据也就是通过XS128单片机输出摄像头采集到的图像经PC串口在电脑上的上位机软件上显示。
Honeywell 室内半球摄像机使用手册

Arduino UNO元件和原理图分析

Arduino UNO元件和原理图分析
这次来分析下Arduino UNO上的各种元件。
先上UNO的原理图。
1、电容
这个符号就代表电容了,白色待变正极黑色代表负极。
47u意思是电容大小为47uF。
一般是电解电容。
2、PMOS管
这个符号表示的是一个MOS管,并且是一个P沟道的MOS管。
旁边的英文一般为型号,所以该MOS管的型号为FDN340P,有了型号信息,在网上就可以查到改芯片的电气特性。
3、晶振
这个符号表示的是晶振,晶振又叫晶体振荡器。
一般是利用石英晶体(二氧化硅的结晶体)的压电效应制成的一种谐振器件,一般单片机需要这个器件用来产生稳定的脉冲,作为单片机内部的震荡频率。
16MHZ表示该晶振的震动频率为16MHZ。
4、运放
运放(operational amplifier,简称OPA)能对信号进行数学运算的放大电路。
它曾是模拟计算机的基础部件,因而得名。
采用集成电路工艺制做的运算放大器,除保持了原有的很高的增益和输入阻抗的特点之外,还具有精巧、廉价和可灵活使用等优点,因而在有源滤波器、开关电容电路、数-模和模-数转换器、直流信号放大、波形的产生和变换,以及信号处理等方面得到十分广泛的应用。
该款运放的型号为LMV358IDGKR,通过型号就可以搜索到具体的电气参数。
解码器与云台镜头及报摄像机电源接线示意图

解码器与云台镜头及报摄像机电源接线示意图:使 用 说 明 书(通用型)公共 光圈 聚焦 变焦 终端开关LED地址开关协议开关AC 24V辅助2辅助1自动右 左 下 上公共技术参考:工作电压:工作电流:AC 200mA(不含云台工作电流)环境温度:-30o C-+70o C自身温度:≤50o C(3小时后恒定温度)工作寿命:继电器触点寿命20万次元器件八年镜头电压:DC 6-12(可调整)镜头控制:光圈、聚焦、变倍云台电压:AC 24V/220V(可选择)云台控制:上、下、左、右、自动摄像机电源:DC 12V,800Ma通讯接口:RS485/RS232(可选)辅助开关:3个(2常开触点,1个AC 24V)5.解码器安装尺寸:下图为解码器背面安装孔位示意图。
1.用型、加强型安装尺寸:A-B=121mmB-D=225mmAD=BD2.室内塑胶型安装尺寸:A-B=108mmB-D=175mmAD=BDAC 220V+10%4. 常见故障排除:以下所死故障主要是针对解码器而言,有关系统主机及云台镜头的故障在此不再作讨论。
.指示灯不亮,解码器不动作可能原因:①无电源;②LED 开关未短接③保险烧坏;(此种情形最多,主要是因为错误地连接云台控制线而造成)自检正常,但无法控制可能原因④协议庙宇不正确⑤地址设置不正确⑥数据线接⑦通讯线路故障⑧码转换器故障自检正常,部分功能控制失效可能原因⑨协议不正确⑩R232与RS485转换器故障,未按RS485的布线规则布线电源指示灯亮,但自检不起作用可能原因:此种情况比较少见。
当系统无法自检时,证明此解码器有故障,请联系您的经销商或直接与生产商联系,不要随意自行拆卸,以免故障范围扩大1.设备概述本解码器是与安防监控系统设备配套使用的一种前端控制设备,可控制室内外云台,电动变焦镜头,一体化摄像机,灯光或雨刷。
支持RS-232和RS-485两种通讯接口,兼容多种控制协议。
其款式多样,外型设计美观大方,且具有超强的防雷、抗死机性能,性价比极高,是各款数字硬盘录像系统及矩阵系统最理想的配套设备。
镜头,云台,解码器,转换器的安装图解

镜头\云台\解码器\转换器的安装方法图解变倍镜头或变倍摄像机(一体机),可以实现焦距、光圈、远近的监控画面变化;云台可以实现左右、上下、自动等监控位置变化;解码器可以把变倍镜头(或一体机)、云台、报警信号等控制信号与主机之间进行双线互相传输;以前和现在我们使用云镜控制器进行操作,除了简单的操作方法外,大量的电缆消耗、布线的复杂性、不能异地控制等缺点,使得现在的监控工程基本抛弃了云镜控制器的使用,95%以上的工程使用解码器(板)技术实现云镜控制,布线简单、操控方便、容易维护。
但是,对于出入行的新手而言,面对几十、几百甚至上千个接线端,确实有点头大。
我们现在对一组普通的设备的安装接线方法进行讲解,希望能对大家有所帮助。
第一步:把变倍镜头或一体机、云台的电缆接入解码器(不可带电操作!!!):参照镜头或一体机、云台的说明书、标签,对照解码器的接线图,仔细准确地把所有电缆接入解码器的接线端子,两者的接口必须完全对应连接。
注意:线头根据接线端子的尺寸做到芯线与接线柱接触良好、牢固,芯线不外露。
做好在安装前先把以上设备检测后再实际安装。
(以经济型解码器为例)第二步:接出摄像机电源、云台电源、设定地址码和波特率开关:根据镜头或摄像机、云台的要求,从解码器的电源输出端接出摄像机电源并调整云台的电源,并根据主机的设定或压缩卡的设定,调整好地址码和波特率。
接入220V电源线。
最后接出485控制线:正负极必须完全对应。
调整主机、加电测试将485控制器的连接线接入主机的COM1或COM2口,调整主机的相关参数,全部安装完毕后,再次检查接线端口和电源、电压,确认无误后,给解码器加电测试,以下的设置以8008软件为例:选择摄像机的控制端口:选择和设置与解码器匹配的协议:解码器结构与使用详细解说作者:来自:广州九洲发布日期:2008-11-29 点击:137在当前闭路电视监控系统中,采用单片机技术完成对镜头、云台(多点)的控制,已得到广泛应用。
数字示波器及其简单原理图
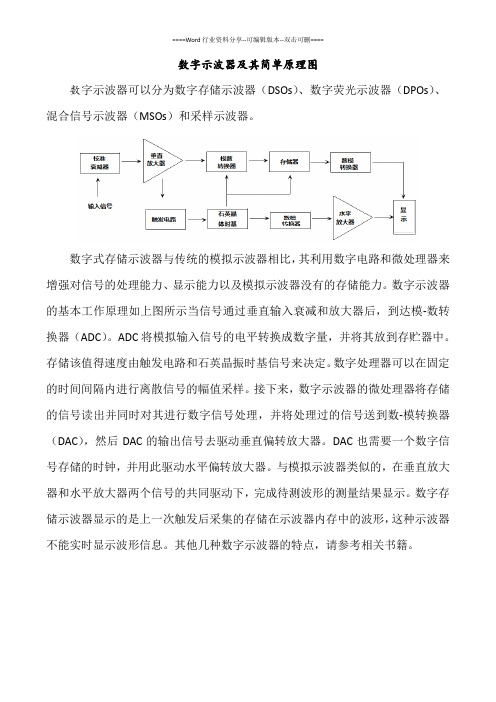
数字示波器及其简单原理图数字示波器可以分为数字存储示波器(DSOs)、数字荧光示波器(DPOs)、混合信号示波器(MSOs)和采样示波器。
数字式存储示波器与传统的模拟示波器相比,其利用数字电路和微处理器来增强对信号的处理能力、显示能力以及模拟示波器没有的存储能力。
数字示波器的基本工作原理如上图所示当信号通过垂直输入衰减和放大器后,到达模-数转换器(ADC)。
ADC将模拟输入信号的电平转换成数字量,并将其放到存贮器中。
存储该值得速度由触发电路和石英晶振时基信号来决定。
数字处理器可以在固定的时间间隔内进行离散信号的幅值采样。
接下来,数字示波器的微处理器将存储的信号读出并同时对其进行数字信号处理,并将处理过的信号送到数-模转换器(DAC),然后DAC的输出信号去驱动垂直偏转放大器。
DAC也需要一个数字信号存储的时钟,并用此驱动水平偏转放大器。
与模拟示波器类似的,在垂直放大器和水平放大器两个信号的共同驱动下,完成待测波形的测量结果显示。
数字存储示波器显示的是上一次触发后采集的存储在示波器内存中的波形,这种示波器不能实时显示波形信息。
其他几种数字示波器的特点,请参考相关书籍。
Agilent DSO-X 2002A 型数字示波器面板介绍该示波器有两个输入通道CH1和CH2,可同时观测两路输入波形。
选择通道1时,示波器仅显示通道1的信号。
选择通道2时,示波器仅显示通道2的信号。
选择双通道时,示波器同时显示通道1信号和通道2信号。
荧光屏(液晶屏幕)是显示部分。
屏上水平方向和垂直方向各有多条刻度线,指示出信号波形的电压和时间之间的关系。
操作面板上的各个按钮按下后,相应参数设置会显示在荧光屏上。
开机后,荧光屏显示如下:测试信号时,首先要将示波器的地(示波器探笔的黑夹子)与被测电路的地连接在一起。
根据输入通道的选择,将示波器探头接触被测点(信号端)。
按下Auto Scale,示波器会自动将扫描到的信号显示在荧光屏上。
增量式编码器工作原理超详细图解

增量式编码器工作原理超详细图解返回列表←增量式编码器工作原理超详细图解文章来源:发布时间:2019/04/12 点击数:3123 旋转编码器是由光栅盘(又叫分度码盘)和光电检测装置(又叫接收器)组成。
光栅盘是在一定直径的圆板上等分地开通若干个长方形孔。
由于光栅盘与电机同轴,电机旋转时,光栅盘与电机同速旋转,发光二极管垂直照射光栅盘,把光栅盘图像投射到由光敏元件构成的光电检测装置(接收器)上,光栅盘转动所产生的光变化经转换后以相应的脉冲信号的变化输出。
编码器码盘的材料有玻璃、金属、塑料等。
玻璃码盘是在玻璃上沉积很薄的刻线,其热稳定性好,精度高。
金属码盘直接以通和不通刻线,不易碎,但由于金属有一定的厚度,精度就有限制,其热稳定性也比玻璃的差一个数量级。
塑料码盘成本低廉,但精度、热稳定性、寿命均要差一些。
编码器以信号原理来分,有增量式编码器(SPC)和绝对式编码器(APC),顾名思义,绝对式编码器可以记录编码器在一个绝对坐标系上的位置,而增量式编码器可以输出编码器从预定义的起始位置发生的增量变化。
增量式编码器需要使用额外的电子设备(通常是PLC、计数器或变频器)以进行脉冲计数,并将脉冲数据转换为速度或运动数据,而绝对式编码器可产生能够识别绝对位置的数字信号。
综上所述,增量式编码器通常更适用于低性能的简单应用,而绝对式编码器则是更为复杂的关键应用的最佳选择--这些应用具有更高的速度和位置控制要求。
输出类型取决于具体应用。
1、增量式旋转编码器工作原理增量式旋转编码器通过两个光敏接收管来转化角度码盘的时序和相位关系,得到角度码盘角度位移量的增加(正方向)或减少(负方向)。
增量式旋转编码器的工作原理如下图所示。
图中A、B两点的间距为S2,分别对应两个光敏接收管,角度码盘的光栅间距分别为S0和S1。
当角度码盘匀速转动时,可知输出波形图中的S0:S1:S2比值与实际图的S0:S1:S2比值相同,同理,当角度码盘变速转动时,输出波形图中的S0:S1:S2比值与实际图的S0:S1:S2比值仍相同。
DCR电源模块工作原理与维修实例分析

关机充电(快充)电路图分析
充电电路
FAST_CHARGE
通过FAST_CHARGE信号使
Q2001导通,将Q2001集电极
(与Q2002的第④、⑤引脚相
连)拉成低电平,从而使
Q2002的第①、⑧引脚导通。
0
若基板上的充电回路断路(如
Q2002的①、⑧引脚无法导
通),则无法对电池进行充电。
根据损坏元器件不同,可能
无论是通过底座还是直接在机器上插入电源适配器,BATT/XEXT信号都会被拉成低电平。 HI CONTROL检测到ACV SENSE信号及BATT/XEXT的低电平信号后判断插入了正确的电源适配 器,二者缺一不可。
注:其它无关信号已擦去,详细电路请参考维修手册
HI CON正常工作要素
VCC
HI Control
虽然说明书中没有明确说明开机充 电的功能,但经验证发现开机后可 以对电池进行充电,只是没有充电 指示灯 通过INIT_CHARGE信号使Q2004第③、 ④引脚导通,将Q2004第③引脚(与 Q2003的第基极相连)拉成低电平, 从而将Q2003的基极电压控制在 7.6V(导通电压),使Q2003导通构 成充电回路。
很多,后检测D4601管子已被击穿,导致摄像机始终 认为是适配器接入,但又没有检测到适配器电源, 所以无法开机
电蚊拍原理图
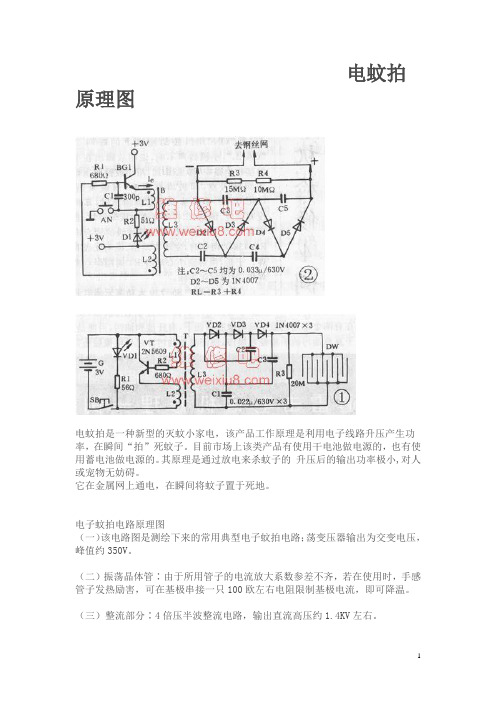
电蚊拍原理图电蚊拍是一种新型的灭蚊小家电,该产品工作原理是利用电子线路升压产生功率,在瞬间“拍”死蚊子。
目前市场上该类产品有使用干电池做电源的,也有使用蓄电池做电源的。
其原理是通过放电来杀蚊子的升压后的输出功率极小,对人或宠物无妨碍。
它在金属网上通电,在瞬间将蚊子置于死地。
电子蚊拍电路原理图(一)该电路图是测绘下来的常用典型电子蚊拍电路;荡变压器输出为交变电压,峰值约350V。
(二)振荡晶体管∶由于所用管子的电流放大系数参差不齐,若在使用时,手感管子发热励害,可在基极串接一只100欧左右电阻限制基极电流,即可降温。
(三)整流部分∶4倍压半波整流电路,输出直流高压约1.4KV左右。
如图所示电子蚊拍电路原理图----------------------一、工作原理“电蚊拍”的电路如图1所示,它主要由高频振荡电路、三倍压整流电路和高压电击金属网三部分组成。
按下电源开关SB,由三极管Q和变压器B构成的高频振荡器得电工作,把3V直流电变成18kHz左右的交流电,经B升压到约500v(输出两端实测),再经二极管VD2~VD4、电容c1~c4三倍压整流升高到1500V左右,加到蚊拍的金属网上。
当蚊蝇触及金属网丝时,虫体造成电网短路,即会被电流、电弧击晕、击毙。
电路中,发光二极管D1和限流电阻器R1构成指示灯电路,用来指示电路通断状态及显示电池电能的耗损情况。
元器件选择晶体管Q选用2N5609型硅NPN中功率三极管,亦可用8050、9013型等常用三极管代替。
D1用φ3mm红色发光二极管,D2~D4用1N4007型硅整流二极管。
R1~R3均用RTX-1/8W型碳膜电阻器。
C1~C4一律用0.033UF/630V型涤纶电容器,SB用6mm×6mm立式微型轻触开关。
BAT用5号干电池两节串联(配塑料电池架)而成,电压3V。
高频变压器B可自制:选用2E19型铁氧体磁芯及配套塑料骨架,L1用φ0.22mm漆包线绕22匝,L2用同号线绕8匝,L3用φ0.08mm漆包线绕1400匝左右。
超高速相机系统组成图解
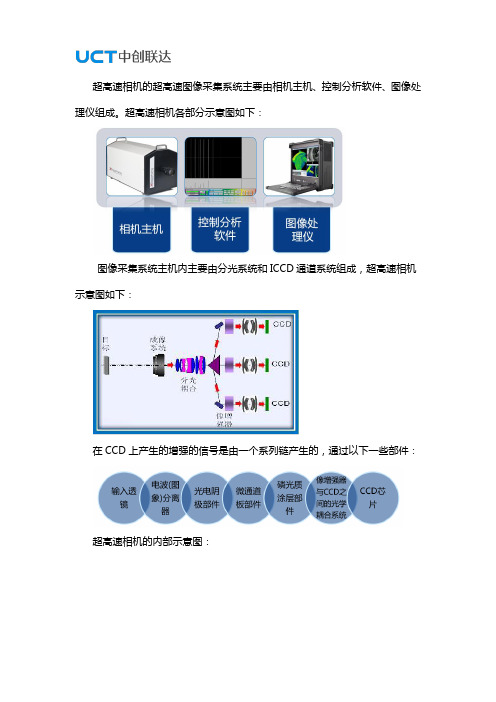
超高速相机的超高速图像采集系统主要由相机主机、控制分析软件、图像处理仪组成。
超高速相机各部分示意图如下:图像采集系统主机内主要由分光系统和ICCD通道系统组成,超高速相机示意图如下:在CCD上产生的增强的信号是由一个系列链产生的,通过以下一些部件:超高速相机的内部示意图:ICCD通道系统内的基本工作原理:通过透镜将拍摄的目标对像光信号传送到增强器的光阴极上,像增强器在高压窄脉冲控制下输出具有较短曝光时间的图像,并由后续CCD接收和记录。
超高速相机系统曝光时间和摄影频率由像增强器驱动源以及精密同步系统控制。
多通道图像分光耦合系统工作原理:传统的图像分割技术往往使用立方或半透膜分束器将一个图像分割成两个相同的低强度二级图像。
由于一般图像都不是单频的,所以传统技术都不可能预测强度比率。
超高速相机使用全反射镜观察所有子图像,使得所有的强度分布都能在一个镜像几何函数中反映出来。
这个方法可以很容易地扩展到紫外光谱区域。
在每个光学路径的通道上都装有一个滤波器,它能产生一些特殊的效果,比如对一个实验生成三种颜色的图像。
对于各种通道设置的不同延迟时间,它还可以用来恢复成3-D空间信息。
下图为图像分光耦合系统示意图:Stanford Computer Optics的ICCD摄像机是独立的解决方案,可以通过RS232,Camera Link或USB连接远程操作和调整。
4 Spec E软件可以作为一体化解决方案,以满足超高速ICCD摄像机系统的所有操作要求。
4 Spec E包括四个功能模块:远程摄像控制,实况监视,图像编辑和光谱分析。
因此,软件可以作为全面的高速ICCD相机操作和数据分析工具。
4 Spec E软件的截图软件主要功能有:1.相机控制远程摄像机控制提供了对ICCD摄像机操作参数的远程访问。
它可以直接在计算机上配置超高速ICCD摄像机系统。
ICCD摄像机的所有参数都可远程编程。
这些参数包括例如MCP电压供应,门控时间,视频增益,触发配置和曝光模式。
光电编码器原理结构图
光电编码器原理结构图增量式光电旋转编码器所谓编码器即是将某种物理量转换为数字格式的装置。
运动控制系统中的编码器的作用是将位置和角度等参数转换为数字量。
可采用电接触、磁效应、电容效应和光电转换等机理,形成各种类型的编码器。
运动控制系统中最常见的编码器是光电编码器。
光电编码器根据其用途的不同分为旋转光电编码器和直线光电编码器,分别用于测量旋转角度和直线尺寸。
光电编码器的关键部件是光电编码装置,在旋转光电编码器中是圆形的码盘(codewheel或codedisk),而在直线光电编码器中则是直尺形的码尺(codestrip)。
码盘和码尺根据用途和成本的需要,可由金属、玻璃和聚合物等材料制作,其原理都是在运动过程中产生代表运动位置的数字化的光学信号。
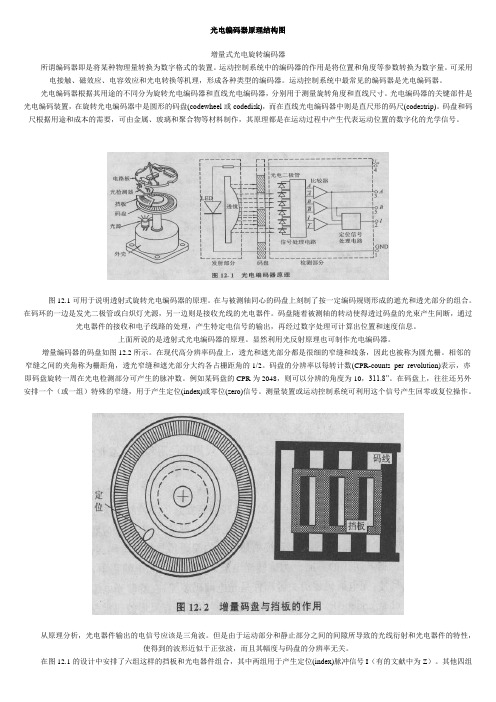
图12.1可用于说明透射式旋转光电编码器的原理。
在与被测轴同心的码盘上刻制了按一定编码规则形成的遮光和透光部分的组合。
在码环的一边是发光二极管或白炽灯光源,另一边则是接收光线的光电器件。
码盘随着被测轴的转动使得透过码盘的光束产生间断,通过光电器件的接收和电子线路的处理,产生特定电信号的输出,再经过数字处理可计算出位置和速度信息。
上面所说的是透射式光电编码器的原理。
显然利用光反射原理也可制作光电编码器。
增量编码器的码盘如图12.2所示。
在现代高分辨率码盘上,透光和遮光部分都是很细的窄缝和线条,因此也被称为圆光栅。
相邻的窄缝之间的夹角称为栅距角,透光窄缝和遮光部分大约各占栅距角的1/2。
码盘的分辨率以每转计数(CPR-counts per revolution)表示,亦即码盘旋转一周在光电检测部分可产生的脉冲数。
例如某码盘的CPR为2048,则可以分辨的角度为10,311.8”。
在码盘上,往往还另外安排一个(或一组)特殊的窄缝,用于产生定位(index)或零位(zero)信号。
测量装置或运动控制系统可利用这个信号产生回零或复位操作。
从原理分析,光电器件输出的电信号应该是三角波。
Arduino-Mega-2560使用手册
来源:Arduino Mega2560简介Arduino Mega2560也是采用USB接口的核心电路板,它最大的特点就是具有多达54路数字输入输出,特别适合需要大量IO接口的设计。
Mega2560的处理器核心是ATmega2560,同时具有54路数字输入/输出口(其中16路可作为PWM输出),16路模拟输入,4路UART接口,一个16MHz晶体振荡器,一个USB口,一个电源插座,一个ICSP header 和一个复位按钮。
Arduino Mega2560也能兼容为Arduino UNO设计的扩展板。
Arduino Mega2560已经发布到第三版,与前两版相比有以下新的特点:在AREF处增加了两个管脚SDA和SCL,支持I2C接口;增加IOREF和一个预留管脚,将来扩展板将能兼容5V和3.3V核心板。
改进了复位电路设计。
USB接口芯片由ATmega16U2替代了ATmega8U2。
概要▪处理器 ATmega2560▪工作电压 5V▪输入电压(推荐) 7-12V▪输入电压(范围) 6-20V▪数字IO脚 54 (其中16路作为PWM输出)▪模拟输入脚 16▪IO脚直流电流 40 mA▪ 3.3V脚直流电流 50 mA▪Flash Memory 256 KB (ATmega328,其中8 KB 用于bootloader)▪SRAM 8 KB▪EEPROM 4 KB▪工作时钟 16 MHz电路图和PCB▪电路图▪硬件设计文件(Eagle文件)▪引脚图电源Arduino Mega2560可以通过3种方式供电,而且能自动选择供电方式▪外部直流电源通过电源插座供电。
▪电池连接电源连接器的GND和VIN引脚。
▪USB接口直接供电。
电源引脚说明▪VIN --- 当外部直流电源接入电源插座时,可以通过VIN向外部供电;也可以通过此引脚向Mega2560直接供电;VIN有电时将忽略从USB或者其他引脚接入的电源。
功率器件工作原理