步进电机可变细分驱动系统的设计.2004
步进电机细分驱动电路设计

前言随着社会的进步和人民生活水平的不断提高及全球经济一体化势不可挡的浪潮,我国微特电机工业在最近10年得到了快速的发展。
快速发展的显着标志是使用领域不断拓宽,用量大增,特别是在日用消费市场和工业自动化装置及系统的表现最为明显。
与此同时,随着电力电子技术、微电子技术和计算机技术、新材料以及控制理论和电机本体技术的不断发展进步,用户对电机控制的速度、精度和实时性提出了更高的要求,因此作为微特电机重要分枝的控制电机也得到了空前的发展。
步进电动机又称为脉冲电动机,是数字控制系统中的一种执行组件。
其功用是将脉冲电信号变换为相应的角位移或直线位移,即给一个脉冲电信号,电动机就转动一个角度或前进一步。
步进电机和普通电动机不同之处是步进电机接受脉冲信号的控制。
现在比较常用的步进电机包括反应式步进电机、永磁式步进电机、混合式步进电机和单相式步进电机等。
其中反应式步进电机的转子磁路由软磁材料制成,定子上有多相励磁绕组,利用磁导的变化产生转矩。
现阶段,反应式步进电机获得最多的应用。
步进电机和普通电机的区别主要在于其脉冲驱动的形式,正是这个特点,步进电机可以和现代的数字控制技术相结合。
不过步进电机在控制的精度、速度变化范围、低速性能方面都不如传统的闭环控制的直流伺服电动机。
在精度不是需要特别高的场合就可以使用步进电机,步进电机可以发挥其结构简单、可靠性高和成本低的特点。
使用恰当的时候,甚至可以和直流伺服电动机性能相媲美。
步进电机被广泛应用于数字控制各个领域:机器人方面,机器人的的关节驱动及行进的精确控制,需要步进电机;数控机床方面,如数控电火花切割机床要求刀具精确走步,减小加工件表面的粗糙度的同时提高效率,需要步进电机;办公自动化方面,如电脑磁盘驱动器中的磁盘进行读盘操作的精确位置控制,需要步进电机,在打印机、传真机中也需要步进电机对设备进行位置控制。
步进电动机是经济型数控系统经常采用的电机驱动系统。
这类电机驱动系统的特点是控制简单,适合计算机系统控制要求。
基于单片机的步进电机细分驱动系统设计

基于单片机的步进电机细分驱动系统设计作者:宋光彦来源:《科技资讯》 2012年第9期宋光彦武警工程大学研究生管理大队陕西西安 710086摘要:自二十世纪中叶,步进电机的应用己渗透到数字控制的各个领域。
它凭借自身性能优点,较早成为典型的机电一体化元件组件。
本文首先对步进电机进行了概述,然后给出了基于单片机的步进电机细分驱动的具体设计。
关键词:单片机;步进电机;控制系统中图分类号:TM3 文献标识码:A文章编号:1672-3791(2012)03(C)-0000-000 引言步进电机又称为脉冲电动机或阶跃电动机,它是基于最基本的电磁感应作用,将电脉冲信号转变为角位移或线位移的开环控制元件。
单片机控制的步进电机广泛地应用于工业自动控制、机器人、计算机外围设备、卫星天线定位系统等。
随着经济的发展,技术的进步和电子技术的发展,步进电机的应用领域更加广阔,同时也对步进电机的运行性能提出了更高的要求。
1 步进电机概述步进电机是一种将电脉冲转变为角位移(或线位移)的机电元件。
根据其内部构造可以分成三大类:反应式(VR型)、永磁式(PM型)和混合式(HB型)。
混合式步进电动机吸取了永磁式和反应式的优点,转子由磁化的磁铁制成,磁极做成复极的形式,分为两相和五相,两相步进角一般为1.8度而五相步进角一般为0.72度,它的精确度高、转矩大、步进角度小,在高分辨率的开环定位系统和低速开环调速系统中占有着不可替代的地位。
步进电机还具有以下优点:(1)动态响应快、易于启动与停止、具有锁定转矩;(2)一般步进电机的精度为步进角的3-5%,步距值不受各种干扰因素的影响;(3)位移与输入脉冲信号相对应,步距误差不长期积累,有良好的跟随性;(4)可利用数字信号控制步进电机直接用于开环控制;(5)控制性能好,停止时有自锁能力。
基于以上优点,步进电机在工业领域得到广泛应用,具有较高的使用价值。
2 步进电机选型及保护电路设计在本系统设计中,步进电机采用两相混合式步进电机,驱动二维随动装置的水平、俯仰运动。
的步进电动机可变细分驱动控制器设计

(2)由于DAC0832是电流型输出,因此要用运
放转化为电压型输出,此处用内部集成了两个运放
的LM358来实现。
(3)从DAC0832出来的阶梯正弦波为单一的
正半波。将给定电压信号波形设定为正弦函数绝对
值的波形,这样就避免了对负电压的处理,简化了控
制过程。
3.2 PWM斩波和恒流控制电路
脉宽调制式细分控制思想已经在前面论述过,
细分状态,7脚设定电机的转动方向。13脚接收外 一种实用的步进电动机可变细分驱动控制器设计
部脉冲信号。A相和B相的8位输出数字量控制字
送入DAC0832进行数模转换。将单片机和D/A接
口连成双缓冲模式。这里对DAC0832在应用中说
明几点:
万方数据
32
触持电棚2咖年第9期巧矿驱碘控创,
…一………………一…-.-·………………………………………………………………………c,.::!://%f々P《,%—/,y摹%g;≯9矿……:
Abstract:The pulse width modulation subdivision driving principle of stepping motor was analyzed at length in the pa— per.Aimed at 2一phase hybrid stepping motor。a PWM constant torque variable subdivision driver based on single chip pro—
9m儿£!nM:2M"埔饽∞
∞"弘”靳"弘驺弛孔∞凹嚣”拍筋M∞笠甜
骂剽—四{
爹
--77 』‰
图3单片机主控单兀和D/A转换电路 (1)DAC0832是反极性输出,参考电平应为负
步进电机可变细分驱动系统的设计.2004

图 3 电流阶梯波 步进电机的电流阶梯波是由功放电路的输入控制信号 电压阶梯波产生的。因此在单片机控制的步进电机细分步 当单 进中, 产生电压阶梯波是一个关键。结合图 2 的电路, 片 机 89C51 把 数 据 00H, 19H, 33H, 4CH, 66H, 7EH 送 给 那么就可以通过功放电路在绕组中产生 0A, TLC7226, 1A, 2A, 3A, 4A 和 5A 的阶梯电流。子程序流程是: A 相导通、 B相 截止、 C 相截止"日相阶梯上升 " A 相阶梯下降 " C 相阶梯 上升" B 相阶梯下降" A 相阶梯上升 " C 相阶梯下降。以上 子程序反复执行, 就可实现细分驱动。 参考文献:
第
卷第 期 年 月
煤
炭
技
术
, ,
" " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " "
步进电机可变细分驱动系统的设计
步进电机细分工作原理
步进电机细分工作原理
步进电机的细分工作原理是通过改变驱动电流的形状来实现的。
一般情况下,步进电机的驱动方式是脉冲驱动,每来一个脉冲,步进电机就会前进一定的步进角度。
而细分则是指在一个步进角度内再细分出更小的角度。
步进电机的细分工作原理是通过改变驱动电流的形状来实现的。
细分驱动电流的形状可以分为两种:单相与双相。
其中,单相细分时,驱动电流只有一路;而双相细分时,驱动电流有两路。
通过改变细分电流的形状,可以使步进电机在一个步进角度内细分出更小的角度,从而实现步进电机的精确控制。
在单相细分中,驱动电流的形状变化主要是通过改变驱动电流的占空比来实现的。
在每一个步进角度中,通过改变驱动电流的占空比,可以在一个步进角度内细分出更小的角度。
占空比变化越细致,步进电机的运动就越精确。
在双相细分中,驱动电流的形状变化则是通过改变驱动电流的相位来实现的。
在每一个步进角度中,通过改变驱动电流的相位差,可以在一个步进角度内细分出更小的角度。
相位差变化越细致,步进电机的运动就越精确。
细分驱动可以提高步进电机的位置精度和运动平滑度,但也会增加控制难度与复杂度。
因此,在选择细分驱动的方式时,需要综合考虑步进电机的要求和实际应用场景来确定最合适的细分方式。
步进电机SPWM细分驱动设计

1.2 研究的目的及意义
图 1 三相混合式步进轴向剖面图
第 2 页 (共 49 页)
2.2 步进电机的基本工作原理
图 2 为三相混合步进电机的简化模型,定子为三相六级,三绕组分别绕在相对的 两个磁极上,绕组通电时这两个磁极的极性是相同的,它的每段转子铁心上有八个小 齿。从电机的某一端看,当定子的一个磁极与转子齿的轴线重合时,相邻磁极与转子 齿的轴线就错开 1/3 齿距。如图 2(a)中所示 a 段转子铁心的情况,A 相磁极下定转子 齿的轴线重合时,B, C 相磁极分别与转子齿错开± 1/情况相同。
1 绪论
1.1 前言
步进电机 SPWM 细分驱动设计
步进电动机又称脉冲电动机或阶跃电动机,其应用发展己有多年的历史。可以说 步进电动机天生就是一种离散运动的装置,是纯粹的数字控制电动机。步进电机驱动 器通过外加控制脉冲,控制步进电动机各相绕组的导通或截止,从而使电动机产生步 进运动。就是说给一个电脉冲信号,电动机就转过一个角度或者前进一步,其输出转 角、转速与输入脉冲的个数、频率有着严格的比例关系。基于步进电机的这些特点, 步进电机被广泛运用于数控机床、医疗、军事、自动化生产线等领域。
目前,国外对步进电机的控制和驱动都趋于采用专用芯片。典型的芯片有两类: 第一类芯片的核心是采用硬件和微小的程序来实现步进电机合理的加减速,与此同时 完成正反转。第二类芯片的关键是可以实现细分驱动。我国步进电机驱动器的研究起 步较早,但发展较慢,直到近些年才有了长足的进步。多年来,科学家们尝试了多种 控制方式,力求改善步进电机系统的性能,有如下常见控制方式:单电压驱动、高低 压启动、恒电流驱动、调频调压驱动、细分驱动。
东方电机C-266型号步进电机系统配置2003 2004年版说明书

RS232C-Compatible ControllerSC8800/SC8800E for Stepping Motor SystemsⅥFeaturesⅷEasy-to-Use●The instruction set software is built into the controller. There is no need for set-up diskettes.●Can be pre-programmed prior to installation.●An easy-to-learn instruction set allows for complete system operation.●End-of-travel and home positions can be easily determined by the three dedicated limit switch inputs.●Operates on 10 to 28 VDC so the controller can be powered by a standard power supply.ⅷProgramming Options●Can be controlled or programmed directly from a computer or ASCll terminal via a standard RS-232C port.●Can be controlled by industry-standard programmable logic controllers so it can run off any already existing PLC.●Linear, S-curve and parabolic acceleration/deceleration profiles are available. ⅷFlexible I/O●There are four programmable inputs and two programmable outputs to give the controller the ability to control other functions within the machine. All inputs and outputs are optically isolated.●Step and direction signal outputs are industry standard TTL level signals in either 1-pulse or 2-pulse modes so the SC8800and the SC8800E can be used with any industry-standard stepping motor and driver package.●All I/Os can be driven by an external DC power supply of 5 to 24 VDC.ⅷEncoder Feedback Capabilities (Model SC8800E)●Nearly every known feedback device can be recognized since the controller can use two or three channels in either single-ended or differential modes.Daisy-Chain Capabilities●Up to 35 different axes can be controlled from one computer or ASCII terminal by daisy-chaining up to 35SC8800or SC8800E controllers together.●Available with an optional encoder input for position verification (model SC8800E).The SC8800and SC8800E controllers can beprogrammed from a computer or ASCII terminal via astandard RS-232C port.ⅥSystem ConfigurationEncoder Feedback (modelController DriverC-266ORIENTAL MOTOR GENERAL CATALOG 2003/2004System Configuration C-266Features C-266ORIENTAL MOTOR GENERAL CATALOG 2003/2004C-267Specifications C-267Dimensions C-269C-268ORIENTAL MOTOR GENERAL CATALOG 2003/2004System Configuration C-266Features C-266Outputs 1 & 3 “ON”StartV e l o c i t y V (H z )The two moves shown above can be executed with the following program commands :Commands 1LOOP 102SAS Push START to begin 3VS700; V15004TA1; TD1.55PC0; EC06H ϩ7D65008MI9DELAY110IF (CP!ϭ0)11THEN JMP112ELSE DELAY313OUT ϭ10114V200015T416WHILE (IN1ϭ0)17MC 18ENDW 19V2500; MC 20DELAY521V120022DELAY223STOP 24ENDL DescriptionLoop this program 10 times Echo message to screenSet start and run velocities for the first move Set Accel time to 1 sec & Decel time to 1.5 secSet position and encoder counters to zero Set direction to CWSet distance to 6500 steps Execute the Index move Delay 1 secondIf encoder position is incorrect,Then, restart program Else Delay 3 seconds.T urn on Outputs 1 and 3Set velocity to 2000 steps/secSet Accel & Decel time to 4 sec. for second move While Input #1 is off,Move continuously End the while loopChange speed to 2500 steps/sec Delay 5 secondsChange speed to 1200 step/sec Delay 2 seconds Stop movingReturn to beginning of loopWhen start signal is input, program beginsⅥProgramming ExampleORIENTAL MOTOR GENERAL CATALOG 2003/2004C-269Dimensions C-269ⅥDimensions Scale 1/4, Unit = inch (mm)SC8800SC8800EWeight: 0.68 lb. (0.31 kg)ⅥSystem LayoutDriverMotorPowerSource。
步进电机细分驱动控制系统设计
步进电机细分驱动控制系统设计姓名:张凯学号: 20104977指导老师:杨小平、杞宁组员:张凯 20104977 (组长)张明 20104991王涛 20104978合肥工业大学电子科学与应用物理学院电子科学与技术系概述步进电机在输入状态发生变化时会转过一定的角度,输入状态不变时不会转动,且在不细分输入情况下每次转过较大的角度,再细分情况下每次转过较小的角度。
本设计是利用 FPGA 实现四相步进电机细分驱动控制,并且系统既能实现步进电机的细分驱动又能实现不细分驱动,还能实现步进电机的正、反转控制。
设计方案与实现下图是通过Quartus Ⅱ综合产生的RTL级电路图。
整个电路共分为6大模块:32进制可加可减计数器(cnt32)、16进制(自加)计数器(cnt16)、4位输出选择器(dec2)、4个4位比较器(new_comp:moto5、moto6、moto7、moto8)、查找表(rom32)、4位输入4位输出2选1多路选择器(mux2to1)。
其中,u_d控制正反转,s选择细分和不细分,en控制停和转,y[3:0]接步进电机的4相输入,clk0和clk5为时钟,且clk5>>clk0(本课设选clk0=4Hz,clk5=32768Hz)。
设步进电机的4相输入分别为A、B、C、D。
细分: cnt32计数输出5位数据送rom32,rom32输出16位数据分别送new_comp:moto5、moto6、moto7、moto8的a[3:0]端口与cnt16计数送来的4位数据b[3:0]比较。
如果a>=b,则agb=1’b1;反之agb=1’b0。
由于clk5>>clk0,从而agb能输出一段占空比稳定的信号(只持续1个或多个clk0周期),即产生1/4、2/4、3/4信号。
再如果s为高电平,则就能实现步进电机的细分输入。
不细分:如果s为低电平,则mux2to1选通由dec2送来的非细分信号dataa[3:0],从而实现步进电机的非细分输入。
基于FPGA的步进电机SPWM细分驱动系统的设计
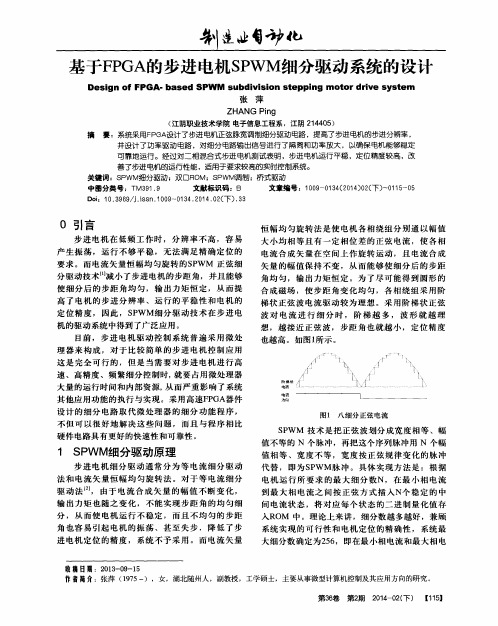
1 S P W M细 分 驱 动 原 理
步 进 电机 细 分 驱动 通 常 分 为 等 电 流 细 分 驱 动 法 和 电流 矢 量 恒 幅 均 匀 旋 转 法 。对 于 等 电流 细 分
代 替 ,即 为 S P WM 脉 冲 。具 体 实现 方法 是 :根 据
电 机 运 行 所 要 求 的 最 大 细 分 数 N,在 最 小 相 电流 到 最 大 相 电流 之 间 按 正 弦 方 式 插 入 N个 稳 定 的 中 间 电 流 状 态 ,将 对 应 每个 状 态 的二 进 制 量 化 值 存 入R OM 中 。理 论 上 来讲 ,细分数 越 多越好 ,兼顾 系 统 实现 的可 行 性 和 电机 定位 的精 确 性 , 系统 最
第3 6 卷
第2 期 2 0 1 4 — 0 2 ( 下) 【 1 1 5 1
l
流之 间 划分 为 2 5 6 个 正 弦 电流 值 ,一 个正 弦 周 期共
定 位 精 度 ,因 此 ,S P W M细 分 驱 动 技 术 在 步 进 电
机 的驱动 系统 中得到 了广 泛 应用 。 目前 ,步 进 电机 驱 动 制 系 统 普 遍 采 用 微 处
波 对 电 流 进 行 细 分 时 ,阶 梯 越 多 , 波 形 就 越 理
想 ,越 接近 正 弦 波 , 步距 角也 就 越 小 ,定 位 精 度
( 江阴职 业技术学院 电子信 息工程系 ,江阴 2 1 4 4 0 5 ) 摘 要 :系统采用F P G A设计 了步进 电机正弦脉宽调制细分驱 动电路 ,提高 了步进 电机 的步进分辨率 ,
并设计 了功率驱 动 电路 ,对细分 电路输 出信 号进行 了隔离和 功率放大 ,以确保 电机 能够 稳定 可靠地 运行。经过 对二 相混合式 步进 电机测 试表 明 ,步进 电机 运行平 稳 ,定位 精度较 高 ,改 善 了步进 电机的运行性 能,适 用于 要求较高的实时控制系统。 关键词 :S P WM 细分驱 动 ; 双 口R O M;S P WM 调制 ;桥式驱动 中囝分类号 :T M3 9 1 . 9 文献标识码 :B 文章编号 :1 0 0 9 —0 1 3 4 ( 2 0 1 4 ) 0 2 ( 下) 一 0 1 1 5 —0 5
步进电机均匀细分驱动器的设计与实现探讨

步进电机均匀细分驱动器的设计与实现探讨在对步进电机细分驱动原理进行分析研究的基础上,提出一种基于FPGA控制的步进电机细分驱动器。
利用FPGA中的嵌入式EAB构成LPM-ROM,存放步进电机各相细分电流所需的PWM控制波形数据表,并通过FPGA设计的数字比较器,同时产生多路PWM电流波形,实现对步进电机转角进行均匀细分控制。
标签:步进电机;细分驱动;脉宽调制1 细分驱动原理步进电机控制中已蕴含了细分的机理。
如三相步进电机按A→B→C……的顺序轮流通电,步进电机为整步工作。
而按A→AC→C→CB→B→BA→A……的顺序通电,则步进电机为半步工作。
以A→B为例,若将各相电流看作是向量,则从整步到半步的变换,就是在IA与IB之间插入过渡向量IAB,因为电流向量的合成方向决定了步进电机合成磁势的方向,而合成磁势的转动角度本身就是步进电机的步进角度。
显然,I AB的插入改变了合成磁势的转动大小,使得步进电机的步进角度由θb变为0.5θb,从而也就实现了2步细分。
由此可见,步进电机的细分原理就是通过等角度有规律的插入电流合成向量,从而减小合成磁势转动角度,达到步进电机细分控制的目的。
2 基于FPGA的硬件实现为了对步进电机的相电流进行控制,从而达到细分步进电机步距的目的,人们曾设计了多种步进电机的细分驱动电路。
最初对电机相电流的控制是由硬件来实现的。
这种细分驱动电路线路复杂,成本高,缺乏柔性,因此现很少采用。
随着大规模集成电路FPGA/CPLD的发展,为步进电机的细分驱动带来了便利。
采用EDA技术进行控制设计,可根据细分要求的步距角计算出各项绕组中通过的电流,存储在FPGA的嵌入式ROM中。
细分控制时,地址计数器自动产生地址送到LPM-ROM,根据不同的地址,LPM-ROM给出相应的数据到数字比较器,与线性锯齿波比较后输出PWM波形,控制功放电路给各相绕组通以相应的电流,实现步进电机的细分驱动。
2.1 系统构成一般情况下总有二相绕组同时通电。
基于细分控制的步进电机驱动器的设计

基于细分控制的步进电机驱动器的设计步进电机驱动器是一种常用于精密控制系统的电机驱动器,其通过精确的细分步进来控制电机的位置和速度。
在设计步进电机驱动器时,需要考虑到多个因素,包括电机的规格、细分控制的方式、控制信号的生成和电机保护等。
以下是一个基于细分控制的步进电机驱动器设计的详细说明。
首先,我们需要选择合适的步进电机作为驱动器的核心。
步进电机的规格包括相数、相电流、步距角等。
根据实际需求和应用场景选择合适的步进电机,一般需要考虑到负载要求、精度要求和速度要求等因素。
接下来,我们需要设计细分控制的方式。
细分控制是通过改变驱动器的控制信号来实现的,常见的细分控制方式有全步进控制、半步进控制和微步进控制。
全步进控制是最简单的控制方式,步进角为1.8°;半步进控制将相邻的全步进位置再二分,步进角为0.9°;微步进控制是最精确的控制方式,它可以将步进角细分到更小的角度,如0.18°或更小。
选择细分控制方式需要根据实际需求和精度要求来决定。
控制信号的生成是步进电机驱动器设计中的一个重要环节。
我们可以使用微处理器或专用的步进电机控制芯片来生成控制信号。
控制信号的频率和脉宽决定了步进电机的速度和位置。
通过调整脉冲频率和脉冲宽度,可以实现对步进电机的精确控制。
同时,还可以使用加速和减速算法来实现步进电机的平滑运动。
在设计步进电机驱动器时,还需要考虑到电机的保护机制。
步进电机在工作时可能会产生过大的热量,因此需要设计合理的散热系统来降低电机温度。
此外,还需要考虑到过流、过压和过载等故障保护功能,以保护电机和驱动器的安全。
综上所述,基于细分控制的步进电机驱动器的设计需要考虑到电机规格的选择、细分控制方式的确定、控制信号的生成和电机保护等多个因素。
通过合理设计和调整参数,可以实现对步进电机的精确控制,满足不同应用需求。
同时,还需要注意安全保护和散热等问题,以确保步进电机驱动器的稳定运行。
步进电机驱动器细分和不细分的区别

步进电机驱动器细分和不细分的区别步进电机驱动器细分和不细分的区别是不细分的驱动器在低速是抖动很大。
有细分的就很理想。
但细分是怎么实现的?谁知道呀!请告之。
以下是对《步进电机驱动器细分和不细分的区别》的回复:共有67人回复 分页:alame:引用 加为好友 发送留言2005-11-10 21:41:细分驱动精度高.细分是驱动器将上级装置发出的每个脉冲按驱动器设定的细分系数分成系数个脉冲输出.比喻步进电机每转一圈为200个脉冲,如果步进电机驱动器细分为32,那么步进电机驱动器需要输出6400个脉冲步进电机才转一圈.通常细分有2,4,8,16,32,62,128,256,512....刘岩利:引用 加为好友 发送留言2005-11-11 6:02:细分后,驱动器输出的电流不再是方波,而是趋近正弦波,细分数越高,效果越好。
刘岩利:引用 加为好友 发送留言2005-11-11 6:22:顺便提醒一下楼主,这里是技术论坛,纯广告是会被删除的。
风海:引用 加为好友 发送留言2005-12-1 0:06:请问刘老师,为何我使用细分功能,细分数越大反而速度提高了呢,PLC脉冲输出不变?谢谢指教!刘岩利:引用 加为好友 发送留言2005-12-1 1:03:"请问刘老师,为何我使用细分功能,细分数越大反而速度提高了"能给出具体数据吗?单纯这样一句话,超出我的理解能力了。
一一哦哦:引用 加为好友 发送留言2005-12-9 0:45:请问刘老师,步进驱动器上有细分拨码,是不是把它拨到细分最大时最好呢?细分的大,小对电机运作起来有什么影响呢?谢谢指教!peter69:引用 加为好友 发送留言2005-12-9 8:28:关于驱动器的细分原理及一些相关说明:在国外,对于步进系统,主要采用二相混合式步进电机及相应的细分驱动器。
但在国内,广大用户对“细分”还不是特别了解,有的只是认为,细分是为了提高精度,其实不然,细分主要是改善电机的运行性能,现说明如下:步进电机的细分控制是由驱动器精确控制步进电机的相电流来实现的,以二相电机为例,假如电机的额定相电流为3A,如果使用常规驱动器(如常用的恒流斩波方式)驱动该电机,电机每运行一步,其绕组内的 电流将从0突变为3A或从3A突变到0,相电流的巨大化,必然会引起电机运行的振动和噪音。
一种实用的步进电动机可变细分驱动控制器设计

0引 言
混 合式 步进 电动 机集反应 式 和永 磁式 步进 电 动 机的优点 于 一身 , 用 非 常 普遍 。它 不 能 简单 地 直 应 接 接到普 通 的交直 流 电源 上 运转 , 需要 专 门 的驱 而 动 器 , 电机本 体选 定 的情况 下 , 制器 的好 坏很 大 在 控
李玲娟 , 刘景 林 , 王 灿
( 西北工业大学 , 陕西西安 70 7 ) 10 2
摘
要 :分析了步进 电动机 的脉 宽调 制 式 细 分 驱 动原 理 , 对 二 相 混 合式 步 进 电动 机 , 计 了 一种 基 于 针 设
A 8C 1 T 9 5 单片机 的 P WM恒转矩可变 细分驱 动控 制器 , 并详 细阐述 了软 、 件部 分的实 现方法 。实验结果 表 明, 硬 该
c s o 8 C 1 w s d sg e . h e l ai n o e cr u ta d s f r ft e s se w r x o n e n d ti. h e t e s rAT 9 5 a e in d T e r ai t ft i i n o t e o y tm e e e p u d d i eal T e ts z o h c wa h rs l n iae a es s m ̄d vso r cso a ih, so e a ig w ss oh, os sl w, ep o et r e rt e ut i d c td t t h y t s h t e iii n p e iin w sh g i p r t a mo t n iewa o t r p r p c ae t n h y i w s h g a d i lo v r r cia . a ih. n t §a s e y p a t 1 c Ke r s sn l hp p o e s r h b d se p n t r s b ii e r i g P M y wo d : ig e c i r c s o ; y r tp i g mo o ; u d vd d d v n ; W i i
基于单片机的步进电机可变细分驱动器设计

年代 中期 步进 电动 机 细分 驱 动 技 术 开 始发 展 , 它在 改善 步进 电动 机 综 合 使 用 性 能 上有 广 泛 的 应 用 价
值 。 国内步进 电动机 细分 驱动 技术 在 2 O世 纪 9 O年
代 中期得 到较 大 的发 展 , 泛 地应 用 于 运 动 控 制 领 广
组 上的电流相 比较 , 如果绕组 电流高于给 定 电流则切
典 型步进 电动 机控制系统如 图 1 所示 , 制器 发 控
t c iv u— v n u d vso rvn . oa he ec twa ea d s b iiin d iig Ke r s s b iiin d iig; u- v ; tp ig m o o ; CU y wo d :u d vso rvn c twa e s e p n t r M
Ab ta tW i h TC8 S 2a h o to o e ,u ig t eM CU o a h e eh g - eibl y a d lw—o t sr c : t t eS h 9 5 st ec n r lc r sn h t c iv ih r l i t n o c s a i v r b es b iiin d ie o tp ig m oo . Th a e d p st ee u l tp i ga ge c n r lsr tg a i l- u dvso rv rfrse p n t r a e p p ra o t h q a- e pn n l o to tae y s
HU e-ig ONG —h o W i n ,S q Qic a
( e a t n f l t ncE gn e ig D p rme t e r i n ie r ,He o g i g I si t o e h oo y Habn 1 0 5 ,C ia o E co n i n j n t u e f c n l , r i 5 0 0 hn ) l a n t T g
步进电动机及其细分驱动技术

电时,转子磁极再沿顺时针方向转 3 0 °与 B 相磁极对齐。
(2)步进电动机细分驱动原理
步进电动机的驱动是靠给步进电动机的各相励磁绕组轮
流通以电流,实现机内部磁场合成方向的变化来使步进电动
机转动的。一般情况下,当步进电动机的内部磁场变化一周
时,电动机的转子转过一个齿距。设两相邻稳定磁场之间的
夹角为θ ,步进电动机以三相三拍运行,θ = 60°;若以
由底行提示栏给出具体要求,测试结果显示在屏幕上,程序 的主体分别有各个模块来实现,这样可靠性强,移植性强,易 修改和调试。
用户可以设置试验频率;需要试验的次数、允许失效的 次数;负载因数(占空比);触点闭合、断开门限电压等参数。 按照要求,设备自动进行试验,根据触点闭合、断开门限电 压值计算动时间、释放时间;检测触点间电压与门限值比较, 判断是否失效;检测并显示触点电压波形、试验电压、电流 波形。
单极恒压串电阻驱动 了高频响应能力,电噪声低,成 电压和绕组温度
中低速及低功率应用场合
本低
高低压驱动
线路较简单,电噪声较低,系统 低频时电动机振动较大、保持转矩依赖于 中低速及中低功率应用场
响应较高
输入电压和绕组温度
合
高频响应大大提高、输出转矩 线路复杂。功率晶体管要承受 2 倍于最大 高速及中功率应用场合
展,广泛地应用于运动控制领域,如数控机床、机器人等。本
文介绍步进电动机及其细分驱动技术在运动控制中的应用。
步进电动机及其细分驱动原理
(1)步进电动机的工作原理
以三相反应式步进电动机(见图 1)为例,当某相子磁极上的齿对齐。因
此步进电动机的工作原理实际上是电磁铁的作用原理。步进
电动机有 A 、B 、C 三相,每相有两个磁极,转子也有两个磁
uln2004a应用实例

uln2004a应用实例
ULN2004A是一种集成式电路,常用于驱动较大负载的步进电机、直流电机和其他高电流负载。
以下是ULN2004A的一些应用实例:
1. 步进电机驱动,ULN2004A可以用作步进电机的驱动器,通
过连接步进电机的相线到ULN2004A的输出端口,可以实现对步进电
机的控制和驱动。
2. 继电器驱动,ULN2004A可以用来驱动继电器,通过连接继
电器的控制端到ULN2004A的输出端口,可以实现对继电器的控制和
驱动。
3. 直流电机驱动,ULN2004A可以用来驱动直流电机,通过连
接直流电机的正负极到ULN2004A的输出端口,可以实现对直流电机
的控制和驱动。
4. LED驱动,ULN2004A可以用来驱动LED灯,通过连接LED的
正负极到ULN2004A的输出端口,可以实现对LED灯的控制和驱动。
总的来说,ULN2004A通常用于需要驱动较大负载的场合,其应
用范围涵盖了步进电机、直流电机、继电器和LED等多种电子设备的控制和驱动。
基于单片机的步进电机可变细分驱动器设计

基于单片机的步进电机可变细分驱动器设计胡维庆;宋启超【摘要】以单片机STC89S52作为控制核心,应用单片机实现高可靠性、低成本的步进电机可变细分驱动的方法。
采用等步距角的细分控制策略,设计出步进电机斩波细分驱动控制系统,包括如何利用单片机控制的斩波、细分驱动方案。
%With the STC89S52 as the control core , using the MCU to achieve high-reliability and low-cost variable-subdivision driver for stepping motor. The paper adopts the equal-stepping angle control strategy to design the cut-wave and subdivision driver control system, including the project realized to use the MCU to achieve cut-wave and subdivision driving.【期刊名称】《交通科技与经济》【年(卷),期】2011(013)005【总页数】4页(P115-118)【关键词】细分驱动;斩波;步进电机;单片机【作者】胡维庆;宋启超【作者单位】黑龙江工程学院电子工程系,黑龙江哈尔滨150050;黑龙江工程学院电子工程系,黑龙江哈尔滨150050【正文语种】中文【中图分类】TK3步进电动机是一种通过电脉冲信号控制相绕组电流实现定角转动的机电元件,与其他类型电动机相比具有易于开环精确控制、无积累误差等优点,在众多领域中获得了广泛的应用。
步进电动机细分驱动技术首先是由美国学者T.R.Fredriksen在美国增量运动控制系统及器件年会上提出。
20世纪70年代中期步进电动机细分驱动技术开始发展,它在改善步进电动机综合使用性能上有广泛的应用价值。
三相混合式步进电机细分驱动器的毕业设计.

三相混合式步进电机细分驱动器的设计院系:机电与自动化学院专业班:电气工程及其自动化1004班姓名:桂想学号:20101131179指导教师:秦实宏2014年5月三相混合式步进电机细分驱动器的设计The Design of Three-phase Hybrid Stepping Motor SubdivisionDrive摘要作为一种常用的开环控制执行元件,步进电机脉冲控制一般分为整步,半步,和细分三种工作方式。
由于整步和半步方式易导致步进电机工作出现振荡现象,且噪声大,效率低,故细分驱动已成为步进电机脉冲控制的主流。
本文正是以三相混合式步进电机为研究对象,针对已有细分驱动采用专用驱动器带来的成本高,档位少,且控制不够灵活等问题,提出一种基于分离器件设计的细分驱动方案。
本文主要研究内容如下:在对三种步进电机分类比较的基础上,讨论了步进电机的几种常用驱动电路。
重点分析并探讨了三相混合式步进电机细分驱动原理,针对目前三相混合式步进电机细分驱动现状,提出结合正弦细分和恒流斩波控制的细分驱动方案。
分析了三相混合式步进电机细分驱动的设计要求,完成了细分驱动的逆变电路主拓扑结构设计。
基于系统整体设计,完成了细分驱动器的硬件设计和软件设计。
其中,硬件设计主要包括微处理器最小系统,电源模块,信号输入及调理单元,电流采样及PI电流调节单元,PWM调制及三路功率驱动电路设计等。
软件设计主要包括上位PC机软件和下位机软件设计。
上位机完成三相混合式步进电机驱动器细分参数的生成,并基于串行通信实现对下位机的参数设置和控制;下位机基于Keil C语言平台,实现细分驱动器的控制算法。
关键词:步进电机细分单片机 PWMAbstractAs a commonly used open-loop control actuator, the pulse control of stepper motor is generally divided into full step, half step, and subdivision driver three ways of working. As full step and half step easily lead stepper motor oscillation and noise, low efficiency, the subdivision division drive has become the mainstream way of the stepper motor pulse control. This article mainly study three-phase hybrid stepping motor, but the equipment is usually expensive, and only has a few stalls, and not flexible enough to control. A new way based on separation device design and sub-driving program. The main contents are as follows.Based on the researching the kinds of stepper motor, we discuss several ways of control. We mainly discuss the subdivision division of three-phase hybrid stepping motor. And make a project to design a good equipment to make the stepper motor work well.Give Three-phase hybrid stepping motor subdivision driver design requirements, and completed of the subdivision drive inverter circuit topology design. Complete hardware design and software design. Including microprocessor system, power supply module, the signal input and conditioning unit, current sampling and PI current regulator unit, PWM modulation and three-way power driver circuit design, hardware design.Software design includes PC software and MCU software design. The program used to computer subdivision drive parameters, communicated with MCU by serial. And the MCU software control the hardware system.Key words:stepper motor subdivision microcontroller PWM目录摘要 (I)Abstract ............................................................................................................................... I I 绪论 .. (1)1 基于三相混合式步进电机驱动器综述 (2)1.1课题研究的目的和意义 (2)1.2国内外研究现状 (2)1.3课题研究应解决主要问题即基本理论依据 (3)2 设计方案 (4)2.1系统设计总体方案框图 (4)2.2微控制器控制电路 (5)2.3电源模块 (6)2.4三路功率驱动电路 (6)3 硬件设计 (7)3.1硬件电路框图 (7)3.2微处理器最小系统设计 (7)3.3开关电源设计 (10)3.3.1 电源需求分析 (10)3.3.2 EMI滤波器设计 (11)3.3.3 反激电源设计 (12)3.4PWM及三相驱动电路设计 (16)3.4.1 PWM电路 (16)3.4.2 三相驱动电路 (20)3.5电流采样及PI调节电路 (22)3.5.1 电流采样电路 (22)3.5.2 PI调节电路 (24)3.6信号接口电路 (25)3.6.1 电流设定和细分档位设定 (25)3.6.2 外部脉冲输入电路 (26)3.6.3 PC通信接口电路 (27)3.6.4 两路正弦信号 (28)3.7保护电路设计 (29)3.7.1 欠压保护 (30)3.7.2 过流保护 (30)3.7.3 过温保护 (31)4 系统软件设计 (32)4.1上位机图形界面设计 (32)4.1.1 细分参数生成软件部分 (32)4.1.2 串口通信部分 (34)4.2KEIL软件编写部分 (37)结论 (39)致谢 (40)参考文献 (41)绪论步进电机是一种很简易方便的位置控制型器件,可以加反馈装置作精确控制,也可以不使用任何反馈装置就能达到比较好的位置控制精度。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
0.5 V, 1 V, 1.5 V, 2 V, 2.5 V。对应的数字信号为 19H, 33H, 4CH, 66H, 7EH。 只要在 89C51 的 P0 口以一定的时间间隔输出数据 19H "33H"4CH" 66H" 7EH 或者输出数据 7EH" 66H" 4CH" 则可以在 TLC7226 的 OUTA 端产生 0.5V " 1V " 33H" 19H, 1.5V"2V" 2.5V 或者 2.5V" 2V" 1.5V" 1V" 0.5V 的阶梯 信号比较, 比较器 波。这个阶梯波送到比较器 LM324 与 产生阶梯电流波对绕组 L 的输出再去驱动功率场效应管 T, 供电。 当 OUTA 输出的阶梯波处于某一个阶梯时。 被送到 而阶梯电压则送到 324 的正输入端。这两 324 的负输入端, 个电压在 324 中进行比较。这时正输入端的阶梯电压相当 于参考电压, 而 是被控电压。当 小于阶梯电压时, 比 从而流过 Re 的电 较器就会输出正电压, 使 T 导通程度增加, 流加大, 的电压值会上升。当 趋向并接近阶梯电压时, 比较器 324 的输出正电压就会减小, T 中的电流就会下降。 上述过程不断自动调节, 使 稳定于和阶梯电压接近的水 平上。这样步进电机的绕组的电流也就稳定在和 对应的 水平, 即产生一个稳定的阶梯电流波。
本文链接:/Periodical_mtjs200410018.aspx
刘 升
) (淮北煤炭师范学院 计算机科学与技术系,安徽 淮北
摘 要: 阐述了步进电机的细分驱动原理, 介绍了基于单片机控制的可变细分驱动电路的设计方法和设计中的相 关技术, 并给出简洁、 高效的步进电机驱动电路。 ; 关键词: 步进电机;可变细分驱动; 中图分类号: 文献标识码: 文章编号: ( )
图 3 电流阶梯波 步进电机的电流阶梯波是由功放电路的输入控制信号 电压阶梯波产生的。因此在单片机控制的步进电机细分步 当单 进中, 产生电压阶梯波是一个关键。结合图 2 的电路, 片 机 89C51 把 数 据 00H, 19H, 33H, 4CH, 66H, 7EH 送 给 那么就可以通过功放电路在绕组中产生 0A, TLC7226, 1A, 2A, 3A, 4A 和 5A 的阶梯电流。子程序流程是: A 相导通、 B相 截止、 C 相截止"日相阶梯上升 " A 相阶梯下降 " C 相阶梯 上升" B 相阶梯下降" A 相阶梯上升 " C 相阶梯下降。以上 子程序反复执行, 就可实现细分驱动。 参考文献:
可变细分控制功率放大电路
细分控制原理 步进电机驱动线路, 如果按照电压脉冲的分配方式, 步 进电机各相绕组的电流轮流切换, 从而使步进电机的转子步 进旋转, 则步距角只有二种, 即整步工作或半步工作, 步距角 已由电机结构确定。 如果每次输入脉冲切换时, 只改变对应绕组中额定电流 的一部分那么转子相应的每步转动也只会是原有步距角的 一部分。额定电流分成多少个级别进行切换, 转子就以多少 步来转完一个原有的步距角。很明显, 通过控制绕组中电流 的数值 可以调整步进电机步距的大小, 也就是把步距角细 分成若干步来完成, 这种步进电机的控制方式称为细分控 制。 可变细分功率放大电路 节电费 元 ( ) 全年节电量和节电费估算 节电量 节电费 元 综合节电率 理论计算出的节电率与实际测算的节电率基本一致。
LIU Sheng
步进电机可变细分驱动系统的设计
作者: 作者单位: 刊名: 英文刊名: 年,卷(期): 刘升 淮北煤炭师范学院,计算机科学与技术系,安徽,淮北,235000 煤炭技术 COAL TECHNOLOGY 2004,23(10)
参考文献(4条) 1.余永权 单片机应用系统的功率接口技术 1992 2.王季秩 电机实用技术 1998 3.刘宝廷 步进电动机及其驱动控制系统 1997 4.李朝清 单片机原理及接口技术 1992
可变细分控制功放电路是一种能够实现不同细分控制 的功放电路。这种功放电路如图 所示。它由 电路、 放 比较放大电路和线性功放电路组成。 电路用于 大器 、 把来自单片机的数据转换成对应的模拟量 。放大器 把 放大成 , 其目的是使单片机输出的最大数据为 时, 功放级输出的电流 恰好是步进电机的额定工作电流。在 实际中可以调节放大器的放大系数而取得。比较放大电路 能够把对绕组电流采样的电压 。和电压 比较, 并产生 送到功放管 的基极, 用于控制绕组 的电流 调整信号 。以大功率管 为核心组成的功率放大级把 信号转换 成电流。
( : , ,
, ’
,
,
) ,
: 收稿日期: 作者简介: 刘升 (
;
;
;
; 修订日期: ) , 男, 实验师, 主要从事单片机和自控理论的实验与科研工作。・ ・ 26煤
炭
技
术
第 10 期
1.2.1 恒流原理 对应模拟电压为 , 通过 当来自单片机的数据为 D , 放大器之后为 。比较放大器和功率放大级组成一个闭环 调节系统。对应于 在绕组中的电流为 。如果有某种因 [1] , 则有 !" !" ( - ) 素使绕组的电流下降 #" #" # 最后, 使绕组电流仍稳定于 。 很明显, 无论对应于任何一个数据 , 都会在绕组中产 生一个恒定电流 。 1.2.2 瞬间响应 当 突然增大, 比如增大到 则通过 D / A 和放大器 A 之后, 其输出信号也相应从 增大到 。这样 ( - ) 也 就产生一个正跳变, 也产生一个正跳变。从而使绕组电流 迅速达到 , 也即对应于数据 。其过程为 #" " # " #" #" 其后, 则下列过程恒流于 ( - ) !" !" #" #" # 瞬间响应也包括单片机输出的数据突然减小的情况。 由于比较放大电路对微小的差值信号有十分灵敏的放大作 用, 使绕组中的阶梯波电流无论上升还是下降都十分陡, 所 以有良好的高频特性。 1.2.3 细分控制 从单片机送来的数据是 8 位数据, 其值为 00H - FFH。 对应于十进制数是 0 ~ 255。在细分时, 要求每个阶梯的电流 差值相等, 这样就要求细分的步数必须能对 255 进行整除。 显然这时细分的阶梯只能为 3, 5, 15, 17, 51, 85 个。 在细分为 3 步时, 单片机每次突变的数据差值为 85, 即 每次突变的数据差值为 51, 即 33H。在 55H。细分为 5 步时, 细分为 15 步时。每次突变数据差值为 17. 即 11H。在细分 为 17 步时, 每次突变数据差值为 15, 即 OFH …, 其余类推。 很明显, 只要在细分控制中, 改变其每次突变的数据差值, 就 可以实现不同的细分控制。
第
卷第 期 年 月
煤
炭
技
术
, ,
" " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " "
步进电机可变细分驱动系统的设计
[1] 李朝清 . 单片机原理及接口技术 [ M] 北京航空航天大 . 北京: 学出版社, 1992. [2] 刘宝廷 . 步进电动机及其驱动控制系统 [ M] 哈尔滨 . 哈尔滨: 工业大学出版社, 1997. [3] 王季秩 . 电机实用技术 [M] 上海科学出版社, . 上海: 1998. [4] 余永权 . 单片机应用系统的功率接口技术 [ M] 北京航 . 北京: 空航天大学出版社, 1992.
图
可变细分功放电路
!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
结束语
该矿主扇安装变频自动控制系统近一年, 运转稳定, 性
能良好, 矿井风量根据井下需要, 调整自如, 在今年春节前的 反风演习中, 反风时间比往年缩短了 。更主要的是近 的节电, 一年给煤矿带来了几百万元的经济效益, 矿山 反映良好。 变频控制技术, 不仅用于煤矿主扇, 在其他行业, 大凡使 用电机拖动, 又需根据需要变换电机功率的设备, 均可采用 该技术。对节省电能, 降低成本, 提高产品竞争力, 具有极其 重要的现实意义。
引言
步进电机是把脉冲信号转换成角位移的执行元件, 由于 其定位精度高、 惯性好、 启动性能好而得到了广泛应用。但 步进电机的性能依赖于驱动电路的控制方式。为了提高步 进电机的分辨率和控制精度, 或者为了降低电机振动、 噪声 等原因, 必须采用细分驱动技术。因此, 本文通过对步进电 机可变细分控制方法的分析和研究, 在选择了合理电路的基 础上, 设计了基于单片机控制的步进电机细分控制器, 实践 [ ] 。 证明该驱动器设计合理, 电路简单, 效果很好
2 单片机和步进电机的细分硬接口
由单片机控制的细分步进中, 通常用阶梯电压信号控制 功放管产生阶梯电流, 使步进电机的相绕组中的电流呈阶梯 形而实现细分步进。 阶梯波电压形成及接口方法如图 2 所示。单片机 89C51 的 P0 口和 TLC7226 相连, TLC7226 是一个 4 路 8 位 D / A 转换 器, 由 89C51 输出的数字信号经它处理之后输出与数字信号 对应的电压。这种对应关系实际上共有 256 个, 因为数字信 它为 0 ~ 255。数字信号为 1 时, 则 OUTA 端产 号共有 256 个, 数字信号为 255 ( 即 FFH) 时, 产生的电压 生电压为 0.0196V, 为 5 V。