3、形位公差_3
3_形状和位置公差-高清

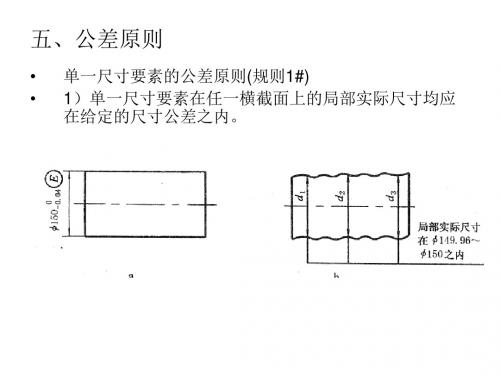
素线直线度公差带示例: 实际圆柱面上的任一素线必须位于间距为公
形位公差是指实际被测要素对图样上给定的理想形状、 理想位置的允许变动量。
形位公差带是限制实际被测要素变动的区域,其大小 是由形位公差值确定的。只要被测实际要素被包含在公差 带内,则被测要素合格。形位公差带体现了被测要素的设 计要求,也是加工和检验的根据。 尺寸公差带是由代表上、 下偏差的两条直线所限定的区域,这个“带”的长度可任 意绘出。形位公差带控制的不是两点之间的距离,而是点 (平面、空间)、 线(素线、轴线、曲线)、面(平面、 曲面)、圆(平面、空间、整体圆柱)等区域,所以它不 仅有大小, 而且还具有形状、方向、位置共4个要素。
d ø 0.01
例2:
0.1
A
(2)当被测要素是中心要素时,指引线箭头指向该要素的 尺寸线,并与尺寸线的延长线重合,如例2.
B
A
b
(3) 当结构相同的几个要素有相同的形位公差要求时, 可只对其中的一个要素标注出,并在框格上方标明。 如4个要素,则注明“4×”或“4槽”等。
(4)当同一要素有多个公差要求时,只要被测部位和标 注表达方法相同,可将框格重叠。
差值 0.02的两平行直线间的区域内。
2)任意方向上的直线度
任意方向上的直线度的公差带为直径为φt 的圆柱面内 的区域。注意公差值前应加注φ。 如图所示,被测圆柱面的 轴线必须位于直径为公差值φ0.04的圆柱面内。
示 例
3 形位公差
CYLINDRICITY
Tolerance zone bounded by two concentric cylinders within which the cylinder must lie.
0.01 1.00 ±0.05 '
Rotate in a V
0.01
Rotate between points
Fig. 3.10
3.5 The Tolerance Zone公差带
(4) The space within a cylinder. 圆柱面内的区域 (5) The space between two coaxial cylinders. 两同轴圆柱面内的 区域 (6) The space between two equidistant surfaces or two parallel planes. 两等距离或平行平面间的区域
Fig. 3.10
1.直线度为实际被測要素(线要素) 对理想直线的允许变动.
0.01
A straightness tolerance is the amount which line elements are permitted to vary from a true line.
2、公差带形状——距离为公差 值0.01两平行平面之间的区域;
Tolerance zone between two parallel planes.
t=0.01
Fig. 3.13 straightness
3. Value must be smaller than the size tolerance.
公差框格含义——圆柱素线的直线度误差不超过公差值0.010
1. Value must be smaller than the size tolerance.
形位公差详解 含图片说明
形位公差的分类介绍 线轮廓度
采用线轮廓度首先 必须将其理想轮廓 线标注出来,因为 公差带形状与之有 关。 理想线轮廓到底面 位置由尺寸公差控 制,则线轮廓度公 差带将可在尺寸公 差带内上下平动及 摆动。
公差带形状为两等距曲线
形位公差的分类介绍 面轮廓度
面轮廓度:限制实际曲面对理想曲面变动量的一项 指标
公差带形状为两等距曲面
形位公差的分类介绍 面轮廓度(复合轮廓度,美国ASME新标准)
可 在 尺 寸 公 差 内 平 动 和 摆 动
在 尺 寸 公 差 内
只 能 上 下 平 动
我国GB标准尙未放入此标注形式。因可用25±0.25来等效替代上格。
形位公差的分类介绍 平行度
平面度:两平面或者两直线平行的误差最大允许值 实际应用:
轴线直线度公差 0.5 0. 75 …… 1
0.5 M
图 78
公差原则
示例(用公差带图解释)
最大实体 原则M
最大实体要求(轴)
19.7 - 20
0.4
0.1 - 0.3 0 +0.1 尺寸
0.1 M
LMS = 19.7
Hale Waihona Puke MMS = 20 MMVS = MMS + t = 20 + 0.1 = 20.1
.
形位公差的定义
定义
形状公差和位置公差简称为形位公差 形状公差:形状公差是指单一实际要素的形状所 允许的变动全量;形状公差标注无基准
要素是指零件上的特征部分 — 点、线、面 实际要素 Real Feature — 零件加工后实际存在的要素(存在误差)
位置公差:位置公差是关联实际要素的位置对基 准所允许的变动全量;位置公差标注一般需有基 准
常用公差和配合

3.圆度
图3-11 平面度及其公差带
圆度是限制实际圆对理想圆变动量的一项指标,它是对 具有圆柱面(包括圆锥面、球面)的零件,在一正截面 内的圆形轮廓要求,如图3-12所示。
图3-12 圆度及其公差带
4. 圆柱度
圆柱度是限制实际圆柱面对理想圆柱面变动量的一项指标,它控 制了圆柱体横截面和轴截面内的各项形状误差,如圆度、素线直 线度、轴线直线度等。圆柱度是圆柱体各项形状误差的综合指标。
本章要点
1. 与尺寸、公差有关的术语及定义。 2. 配合与基准制。 3. 表面粗糙度的概念、特征代号及标注。 4. 形位公差项目、符号及标注。
3.1 尺寸公差与配合
3.1.1 与尺寸有关的术语和定义
1. 基本尺寸
基本尺寸是指设计给定的尺寸。它是根据零件的结构、 强度、刚度和工艺性等要求,通过计算、试验或按类比 法确定的。基本尺寸的代号:孔用D表示,轴用d表示。
xcdnpx dgxcdn dgxcpx xcwxpx xunchi-px 0759mz
第3章 lczx188 shbeking hd8go hd88go oemgc 189288 hzp580
yjoem oemdg xcdnpx oemdg zhongtezc yanjigz 189288 oemgc yanjigz yjoem hfoem 189286
当极限尺寸大于、小于或等于基本尺寸时,极限偏差分 别为正、负或零值,所以偏差可以为正、负或零值。
图3-1 尺寸、公差与偏差的示意图
1. 尺寸公差
零件在制造过程中,由于加工或测量等因素的影响,完 工后的实际尺寸总存在一定的误差。为保证零件的互换 性,必须将零件的实际尺寸控制在允许变动的范围内, 这个允许的尺寸变动量称为尺寸公差。所以尺寸公差是 指在切削加工中零件尺寸允许的变动量,用T表示。尺 寸公差等于最大极限尺寸与最小极限尺寸之差,或等于 上偏差与下偏差之差,所以公差总是为正值。在基本尺 寸相同的情况下,尺寸公差愈小,则尺寸精度愈高。孔 公差用Th表示,轴公差用Ts表示。
3次元形位公差

3次元形位公差是指在设计和制造过程中对于三维物体的几何形状、位置和方向进行精确测量和控制的方法。
形位公差可以描述零件的位置、平行度、垂直度、嵌套、倾斜度和连续曲面等方面的误差。
形位公差的应用范围广泛,从微型零件到大型机械零件都需要进行形位公差控制。
无论是汽车、飞机、机器人还是电子设备,都需要依靠形位公差来确保配合和功能。
形位公差的准确控制可以大大提高产品的可靠性、性能和精度,减少产品的故障率和成本。
三坐标测量 形位公差评价
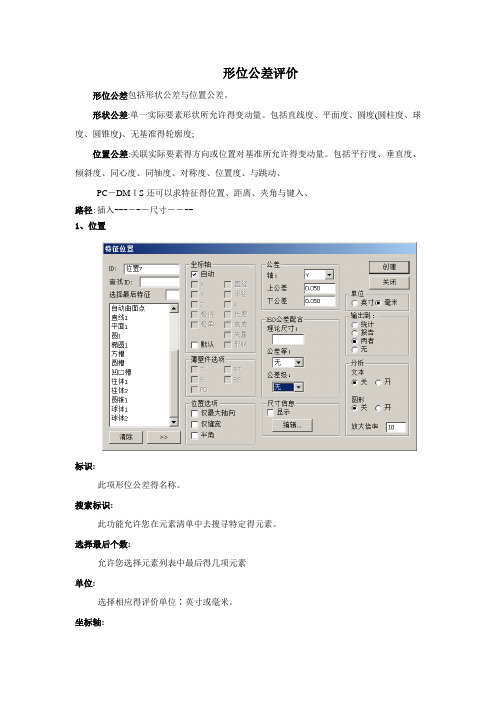
形位公差评价形位公差包括形状公差与位置公差。
形状公差:单一实际要素形状所允许得变动量。
包括直线度、平面度、圆度(圆柱度、球度、圆锥度)、无基准得轮廓度;位置公差:关联实际要素得方向或位置对基准所允许得变动量。
包括平行度、垂直度、倾斜度、同心度、同轴度、对称度、位置度、与跳动、PC-DMIS还可以求特征得位置、距离、夹角与键入、路径:插入------尺寸----1、位置标识:此项形位公差得名称。
搜索标识:此功能允许您在元素清单中去搜寻特定得元素。
选择最后个数:允许您选择元素列表中最后得几项元素单位:选择相应得评价单位∶英寸或毫米。
坐标轴:X =输出 X 轴得值、ﻫY = 输出 Y 轴得值。
ﻫZ= 输出 Z轴得值。
ﻫR = 输出半径(直径得一半)值。
ﻫD = 输出直径值、角度=锥度长度=柱体得高度、槽得长度、椭圆得长度高度=柱体得高度与椭圆得宽度形状•对于圆或柱体特征,形状为圆度尺寸。
•对于平面特征,形状为平面度尺寸。
•对于直线特征,形状为直线度尺寸公差:若对各轴向公差相同,那么在公差选项中选“全部",并输入一个值为正、负公差值;若不同,则分别输入正、负公差;尺寸信息:在图形显示窗口显示尺寸信息。
输出到:定义向何处送出评价信息∶统计、报告、二者、无。
分析用此选项可以显示一些数据。
文本∶指PC—DMIS在检查报告中,在该元素数据行得下面,列出了组成该元素得点得详细信息、图形∶在图形显示窗口中,用带方向得箭头来表示尺寸得误差信息,箭头得大小由放大倍数(乘数)来确定。
薄壁件轴:对于薄壁工件,按照轴线方向评价其误差,由于加工过程中此类零件得变形比较大,所以轴线与零件得坐标系并不一致,该软件提供了如下得参数,用来评价此类零件。
首先应在编辑/Preferences/设置中选中显示薄壁件扩展项,下面得参数评价时才有效、逼近矢量方向偏差(T)-—输出沿逼近矢量得误差(曲线上得点)曲面矢量方向偏差(S)——输出沿表面法矢得偏差报告矢量方向偏差(RT)—-输出沿报告矢量方向得偏差曲面报告矢量方向偏差(RS)——输出沿表面报告矢量方向得偏差销直径(PD)-—输出沿圆孔实际所在平面法向矢量得直径注意:这些可选项并不就是适用于所有得元素,例如销直径只适于冲压类元素,例如圆、圆台,下列得清单列出了推荐或缺省使用得类型。
三、形位公差
Created by Legend Studio
2、形位公差的标注方法
⑷其它标注规定
当给定的公差带形状为圆或圆柱时,应在公差数值 前加注“φ”,当给定的公差带形状为球时,应在公 差数值前加注“Sφ”。。
Created by Legend Studio
2、形位公差的标注方法
⑷其它标注规定
形位公 差有附 加要求 时,应 在相应 的公差 数值后 加注有 关符号。
⑵基准符号(旧国标) 在位置公差的标注中,基准须 用符号表示。 基准符号由粗短线、圆圈、连 线和字母组成。 基准符号字母不得采用E、I、 J、M、O、P、L、R、F。 当字母不够用时可加脚注,如 A1,A2,…B1,B2 …
基准符号
圆圈 基准字母 连线 粗短线
A
Created by Legend Studio
Created by Legend Studio
2、形位公差的标注方法
⑷其它标注规定
如果需给出被测要素任一固定长度上(或范围)的公差值时,其标注方法如下。 图a表示在任一100mm长度上公差值为0.02mm。。 图b表示在任一100*100mm的正方形面积内,平面度公差数值为0.05mm 图c表示在1000mm全长上的直线度公差值为0.05mm,在任一200mm长度上的 直线度公差数值为0.02mm。
)
2、某尺寸的上偏差一定大于下偏差。( ) 3、代号H和h的基本偏差数值都等于零。( ) 4、公差带代号由基本偏差代号和公差等级数字组成。( ) 四、综合题
2、形位公差的标注方法
⑵基准符号(新国标) 在形位公差的标注中,与被测要素 相关的基准用一个大写字母表示。 字母标注在基准方格内,与一个 涂黑的或空白的三角形相连以表 示基准。
形位公差基础知识

(1)实际要素 即零件上实际存在的要素,可以通过测量 反映出来的要素代替。
(2)理想要素 它是具有几何意义的要素;是按设计要求 ,由图样给定的点、线、面的理想形态,它不存在任 何误差,是绝对正确的几何要素。
3. 按所处地位分类
(1)被测要素 图样中给出了形位公差要求的要素,是测 量的对象。
之间。
4.圆柱度
圆柱度公差带是半径差为公差值t的 两同轴圆柱面之间的区域。如图所示, 被测实际圆柱表面必须位于半径差为公 差值0.05mm的两同轴圆柱面之间。
圆柱度和圆度的区别:圆柱度是相对于整个圆柱面 而言的,圆度是相对于圆柱面截面的单个圆而言的 ,圆柱度包括圆度,控制好了圆柱度也就能保证圆 度,但反过来不行。
形状公差是以要素本身的形状为研究对象 ,而位置公差则是研究要素之间某种确定的方 向或位置关系。
1. 按结构特征分类
(1)轮廓要素 构成零件外形为人们直接感觉到的点、 线、面。
(2)中心要素 轮廓要素对称中心所表示的点、线、面 。其特点是它不能为人们直接感觉到,而是通过相 应的轮廓要素才能体现出来。
(1)公差特征符号
根据零件的工作性能要求,由设计者从表 中选定。
(2)公差值
用线性值,以mm为单位表示。如果公差 带是圆形或圆柱形的,则在公差值前面加注φ ;如果是球形的,则在公差值前面加注Sφ。
(3)基准
基准符号如下图所示。相对于被测要素 的基准,由基准字母表示。为不致引起误解, 字母E、I、J、M、O、P、L、R、F不采用。
(2)基准要素 用来确定被测要素方向和位置的要素。基 准要素在图样上都标有基准符号或基准代号。
4. 按功能关系分类
(1)单一要素 仅对被测要素本身给出形状公差的要素。 (2)关联要素 与零件基准要素有功能要求的要素。
第三章 形位公差

第三章形位公差零件的形状和位置误差(简称形位误差)对产品的使用性能和寿命有很大影响。
形位误差越大,零件几何参数的精度越低。
为了保证机械产品的质量和互换性,应该对零件给定形位公差,用以限制形位误差。
我国已经把形位公差标准化,发布了国家标准。
§2.1基本概念形位公差是研究构成零件几何特征的点、线、面等几何要素。
图3.1 手柄如图3.1中所示的零件,它是由平面、圆柱面、端平面、圆锥面、素线、轴线、球心和球面构成的。
当研究这个零件的形状公差时,涉及对象就是这些点、线、面。
一般在研究形状公差时,涉及的对象有线和面两类要素,要研究位置公差时涉及的对象除了有线和面两类要素外,还有点要素。
1、零件几何要及分类l)按结构特征分◎轮廓要素:构成零件外形的点、线、面。
如图2.1中的圆柱面和圆锥面及其他表面素线、球面、平面等,都是轮廓要素。
零件内部形体表面、如内孔圆柱面等,也属轮廓要素。
◎中心要素:是具有对称关系的轮廓要素的对称中心点、线、面。
其特点是实际零件不存在具体的形体而是人为给定的,它不能为人们接感觉到,而是通过相应的轮廓要素才能体现出来的。
如图2.1的圆柱体轴线,它是由圆柱体上各横截面轮廓的中心点(即圆点)所连成的线。
零件上的中心线、中心面、球心和中心点等属于中心要素。
2)按存在状态分◎理想要素:是具有几何意义的要素,它是按设计要求,由图样给定的点、线、面的理想形态,它不存在任何误差是绝对正确的几何要素。
理想要素是作为评定实际要素的依据,在生产中是不可能得到的。
◎实际要素:零件上实际存在的要素,测量时由测得要素来代替。
3)按检测时的地位分◎被测要素:在图样上给出形位公差要求的要素称为被测要素。
如图3.2中的Фd2圆柱面和Фd2的台肩面等都给出了形位公差,因此都属被测要素。
图3.2 零件几何要素◎基准要素零件上用来确定被测要素的方向或位置的要素为基准要素。
基准要素在图样上都标有基准符号或基准代号,如图3.2中,Фd2的中心线即为基准要素。
形位公差特征符号全解_3[1]
![形位公差特征符号全解_3[1]](https://img.taocdn.com/s3/m/cc5d7e72941ea76e59fa042b.png)
圆柱度和圆度的作用:柴油机的结构中有多处规定了圆柱度和圆度,如发动机的活塞环, 控制好活塞环的圆度可保证其密封性,而活塞的圆柱度则对于其在缸套中上下运动的顺畅性 至关重要。
区别:径向圆跳动测量的是圆柱外表面随圆柱绕基准的转动产生的径向跳动,而 端面圆跳动测量的是圆柱的端产生的轴向跳动。
加工车间常用形位公差详解
形位公差各项目的符号
形状公差
位置公差
项目
符号 项 目
符号
直
平行度
∥
线
—
度
定向垂直度⊥平面度
倾斜度
∠
圆 度
定 位
圆 柱 度
线轮廓度 面轮廓度
⌒跳
动
形位公差框格
同轴度
加工车间常用形位公差详解
一.形状公差
1. 直线度 :
直线度公差是实际直线对理想直线的允许变动量,限制了加工面或线在某个方向上的偏 差,如果直线度超差有可能导致该工件安装时无法准确装入工艺文件规定的位置。
标注含义:被测表面投影后为一接近直线的“波浪 线”(如右图),该“波浪线”的变化范围应该在距离 为公差值 t(t=0.1)的两平行直线之间。
标注含义:被测圆柱面的任意截面的圆周必须位于半 径差为公差值 t(t=0.025)的两同心圆之内,如右图区 域。
4.圆柱度 :
圆柱度,指工件圆柱表面所有垂直截面中最大尺寸与最小尺寸之差,限制了被测圆柱面 的形状误差,是圆柱的实际形状相对理想形状的最大允许变动量。
标注含义:被测圆柱面必须位于半径差为公差值 t (t=0.1)的两同轴圆柱面之间,如右图。
公差与测量技术_第3章_形位公差及检测
汽车制造:在汽车制造过程中形位公差与测量技术被广泛应用于车身、发动机、底盘等零部件的制造和装配。
航空航天:在航空航天领域形位公差与测量技术被用于飞机、火箭、卫星等设备的制造和装配以确保其性能和安 全性。
机械设备制造:在机械设备制造领域形位公差与测量技术被用于各种机械设备的制造和装配如机床、机器人、医 疗器械等。
直接测量法:通过测量工具直接测量工件的尺寸和形状
间接测量法:通过测量工件的位移、角度等参数来间接测量形位误差
光学测量法:利用光学仪器进行非接触测量如投影仪、光学测量仪等
激光测量法:利用激光干涉仪进行高精度测量适用于精密加工和检测
计算机辅助测量法:利用计算机软件进行数据处理和分析提高测量精度 和效率
汽车零件的尺寸和形状公差检测 汽车车身的形位公差检测 汽车轮胎的形位公差检测 汽车发动机和变速箱的形位公差检测 汽车底盘和悬挂系统的形位公差检测 汽车电子系统的形位公差检测
航空航天领域:用于飞机、卫星等设备的制造和检测 汽车制造领域:用于汽车零部件的制造和检测 机械制造领域:用于机械设备的制造和检测 电子制造领域:用于电子设备的制造和检测 建筑工程领域:用于建筑结构的制造和检测 医疗设备领域:用于医疗设备的制造和检测
满足客户需求:形位公 差与测量技术的提高有 助于满足客户的需求提 高客户满意度。
提高测量仪器的精度和稳 定性
加强测量人员的培训和技 能提升
采用先进的测量方法和技 术如激光测量、三维扫描 等
建立完善的测量管理体系 确保测量数据的准确性和 可靠性
加强与生产部门的沟通和 协作确保测量结果的及时 性和有效性
行数据处理和分析
确定测量报告:根据测量结果 编写测量报告包括测量数据、
分析结果、结论等
3.3.3形状和位置公差 ——形位公差释义(位置公差、跳动公差)

1、位置、跳动公差的概念和项目 与符号 2、位置、跳动公差公差带的含义 3、位置、跳动公差的标注方法 1、位置、跳动公差公差带的含义 2、标注位置、跳动公差
1、位置公差包括同心度和( )公差、( )、 和位置度公差;跳动公差包括圆跳动公差和( ) 公差。
2、点的同心度公差带为( )等于公差值t的( ) 所限定的区域。其圆心与基准点重合,公差值前必 须加注符号( )。 3、中心平面的对称度公差带为( )等于公差值 t、( )于基准中心平面的两( )平面所限定 的区域。
9、被测线与基准线在同一平面上,线对基准线的 倾斜度公差的公差带为( )为公差值t的两( ) 平面之间所限定的区域。两平行平面按给定的理论 角度( )于公共基准轴线。 间距 平行 倾斜
10、面对基准面的倾斜度公差的公差带为( )等 于公差值t 的两( )平面所限定的区域。该两平 行平面按给定的角度( )于基准平面。 间距 平行 倾斜
1、全跳动公差 是指被测提取要素绕基准轴线 做无轴向移动回转,同时指示计沿给定方向的理想 直线连续移动(或被测提取要素每回转一周,指示 计沿给定方向的理想直线间断移动),由指示计在 给定方向上测得的最大和最小示值之差所允许的最 大变动量。按测量位置不同,分经向全跳动公差和 端面全跳动公差二个项目。
形位公差释义——位置、跳动公差
形位公差释义——位置、跳动公差
复习 1、方向公差包括( )、( )和倾斜度。
平行度、垂直度 2、线对基准线的平行度公差的公差带为( )于 基准轴线、( )等于公差值t的( )所限定的 区域,公差值前应加符号( )。
平行 直径 圆柱面 Ø
形位公差释义——位置、跳动公差
3、线对基准平面的平行度公差的公差带为( ) 于基准平面、( )等于公差值t的两平行( ) 所限定的区域。 平行 间距 平面
形位公差3(公差原则)
最大实体要求标注
Φ0.1 M Φ0.015 M AM
A 用于被测要素时 用于被测要素和基准要素时
最大实体要求的应用(被测要素)
应用:适用于中心要素。主要用于只要求可装配性的 零件,能充分利用图样上给出的公差,提高零件的合 格率。 边界:最大实体要求应用于被测要素,被测要素遵守 最大实体实效边界。即:体外作用尺寸不得超出最大 实体实效尺寸,其局部实际尺寸不得超出最大实体尺 寸和最小实体尺寸。 最大实体实效尺寸:MMVS=MMS±t t—被测要素的形位公差,“+”号用于轴,“-”号用于 孔。
零形位公差举例
如图所示孔的轴线对A的垂直度公差,采用最大实体要求的零形 位公差。该孔应满足下列要求: 实际尺寸在ø 49.92mm~ ø 50.13mm内; 实际轮廓不超出关联最大实体边界,即其关联体外作用尺寸不小 于最大实体尺寸D=49.92mm。 当该孔处在最大实体状态时,其轴应与基准A垂直;当该孔尺寸 偏离最大实体尺寸时,垂直度公差可获得补偿。当孔处于最小实 体尺寸时,垂直度公差可获得最大 补偿值0.21mm。 ø50+0.13 –0.08
-0.013 -0.028
图例
G
G基准平面
Φ0.01 G
90°
关联体外作用尺寸
B
体内作用尺寸
在被测要素的给定 长度上,与实际内 表面(孔)体内相 接的最小理想面, 或与实际外表面 (轴)体内相接的 最大理想面的直径 或宽度,称为体内 作用尺寸。
最大实体状态(尺寸、边界)
最大实体状态(MMC):实际要素在 给定长度上具有最大实体 最大实体时的状态。 最大实体 最大实体尺寸(MMS):实际要素在 最大实体状态下的极限尺寸。 (轴的最大极限尺寸dmax,孔的最小 极限尺寸Dmin) 边界:由设计给定的具有理想形状的 极限包容面。 最大实体边界:尺寸为最大实体尺寸 的边界。
形位公差

3.位置度 要求被测实际要素与基准要素有一定的位置关系。
跳动位置公差
一、圆跳动 单个被测实际要素在任一截面上相对于基 准要素的允许跳动量。 根据允许变动的方向的不同,圆跳动可分 为: 径向圆跳动 端面圆跳动 斜向圆跳动
1.径向圆跳动 径向圆跳动用于控制圆柱表面任一横截面上的跳 动量。
2.端面圆跳动 端面圆跳动用于控制端面任一测量直径处,在 轴向方向的跳动量。
中心基准要素的标注
C
A
B
3.当基准要素为中心孔时,基准符号置于中 心引出线的下方;当基准要素为圆锥体的轴 线时,基准线符号中的连线应与圆锥体直径 尺寸线(大端或小端)对齐或与圆锥体内空白 的尺寸线对齐。
中心孔为基准要素的标注
B4/7.5 GB145-85
B4/7.5 GB145-85
A
B A
4. 任选基准的标注,应将基准符号的粗短横 线改为箭头,此时零件的两端面互为基准。
基准符号
A B C
1. 当基准要素为轮廓线和表面时,基准符号 应置于该要素的轮廓线或其引出线标注,并 应明显地与尺寸线错开。基准符号标注在轮 廓的引出线上时,可以放置在引出线的任一 侧,但基准符号的短线不能直接与公差框格 相连。
轮廓基准要素的标注
A
B
A
2. 当基准要素是轴线或中心平面或由带尺寸 的要素确定的点时,基准符号的连线应与该 要素的尺寸线对齐;当基准符号与尺寸线的 箭头重叠时,可代替尺寸线的一个箭头;
6. 面轮廓度公差 实际被测要素对理想轮廓面的允许变动量,其公 差带是距离为公差值t,对理想轮廓面对称分布的两 等距曲面之间的区域,理想轮廓面由理论正确尺寸标 出。
位置公差
位置公差 是关联实际要素的位置对基准的 变动全量。 位置公差包括: 定位位置公差 定向位置公差 跳动位置公差
形位公差详解-含图片说明

公差带形状为两同心圆
形位公差的分类介绍 圆柱度
圆柱度:任一垂直截面最大尺寸与最小尺寸差为圆 柱度;圆柱度误差包含了轴剖面和横剖面两个方面 的误差 实际应用:
1
计量室 圆度、圆柱度仪 、高精度主轴、 调平、调心
2
生产现场 通过检查直径的 变化量(椭圆、 锥度 )反映圆度 的大致状况
形位公差的分类介绍 圆柱度
1
偏摆仪 是用于检测圆跳 动及全跳动的专 用量仪
2
专用检具
适用于不同工件、不 同场合的检测要求; 一般通过布置多个测 点同时测量全跳动, 而不是通过测点移动 ;如曲轴止推面的全 跳动;缸孔缸套端面 对缸孔的全跳动
公差原则 公差原则
公差原则,线性尺寸公差与形位公差之间关系。
公差原则分类:
示值型量规 一般采用轮廓采点 、计算轴线、再评 价轴线的方法(与 三坐标测量类似) ;如连杆颈对主轴 颈的对称度
该项目符号在ASME标准中有,但在GM A-91标准中却无。 GM 新标准虽将这两项目符号放入,但仍明确不推荐使用
形位公差的分类介绍 位置度
位置度:实际被测要素相对于其理想位置的变动量 实际应用: 1
1
偏摆仪 是用于检测圆跳 动及全跳动的专 用量仪
2
专用检具 适用于不同工件、 不同场合的检测要 求;如曲轴主轴颈 、法兰端面的跳动 ;缸盖阀座锥面对 导管孔的跳动
形位公差的分类介绍
全跳动
全跳动:实际被测要素绕基准轴线无轴向移动的连续旋转, 同时指示表作平行或垂直于基准轴线直线运动,由指示表在 给定方向上测得的最大最小读数的差值;分为径向、端面、 斜向圆跳动 实际应用:
给一个方向
给二个方向
公差带形状为两平行平面
英制形位公差应用指南介绍3(公差原则部分)
规则2a#(仅用于位置度公差)
如果适用,可以对给定公差、基准要素或 两者同时在图样上规定RFS。
关于RFS的解释
在RFS基础上给出几何公差时,规定的公差与 被测要素的实际尺寸无关。该公差被限定在给 定值之内,与该要素的实际尺寸无关。
同样,在RFS基础上的基准要素意味着必须以 轴线或中心平面定心,而与基准要素的实际尺 寸无关。
• 规则1#的应用 • 通止规概念和检测应用
• 通规是测量尺寸要素MMC尺寸和MMC理想形 状。通规就是尺寸要素MMC的理想几何形状。
• 止规可测量尺寸要素的LMC尺寸。LMC尺寸要 作两点法测量。
•
规则1#失效 在下列情况下规则1#失效。 ----直线度应用在尺寸要素上。 ----一个说明应用在尺寸要素上。
• 螺纹
对于螺纹的方向或位置公差以及作为基准要 素都是指由螺纹中径轴线。如果不是指中径而 是其它特定的螺纹要素(如小径或大径)必须在 公差框格之下或基准要素符号之下或基准要素 符号附近予以明确。
•
齿轮和花键 除螺纹要素外,对齿轮、花键的方向 或位置公差以及作为基准要素,都必须明 确指出是用于齿轮、花键的哪个特定要素 (如大径、节径或小径),且必须在公差框 格之下或在基准要素符号之下进行规定。
• 关于MMC下的零公差(0 )解释 • 当位置或方向公差应用在MMC下的零公差(0 ) 时,该公差完全依赖于被测要素的实际尺寸。如 果要素处于MMC极限尺寸下,此时不允许有位 置或方向公差,而且,在这种情况下,它必须是 处C时,允许公差等于这个偏离量。 当形状处于LMC时,此时总的允许位置或方向偏 差为最大。
五、公差原则
• • 单一尺寸要素的公差原则(规则1#) 1)单一尺寸要素在任一横截面上的局部实际尺寸均应 在给定的尺寸公差之内。
3 形位公差与检测
互换性与测量技术
理想要素与实际要素(按存在的状态分)
• 理想要素——具有几何意义的要素。
• 实际要素——零件上实际存在的要素,即加工后得到的 要素。
EXIT
第3章 形位公差与检测
互换性与测量技术
被测要素和基准要素
EXIT
第3章 形位公差与检测
被测要素
互换性与测量技术
为组成要素 导出要素(假想要素)和 组成要素(可见要素)
形位公差带具有的四个特征——形状、大小、方向和位置。
EXIT
第3章 形位公差与检测
互换性与测量技术
一、形状公差
3.2 形状误差与形状公差
形状公差:是指单一实际要素的形状所允许的变动全量。 形状公差带:是限制单一实际被测要素变动的区域。
实际形状要素合格的标志: 其实际形状在形状公差带所限定的区域内。
EXIT
第3章 形位公差与检测
互换性与测量技术
EXIT
第3章 形位公差与检测
互换性与测量技术
(3)在任意方向上的直线度
任意方向上的直线度在公差值前加注“ ”,公差带是直径为公差值t的圆 柱面内的区域。被测圆柱体d的轴线必须位于直径为公差值0.04mm的圆柱面内。
φt
EXIT
第3章 形位公差与检测
直线:两高夹一低或两低夹一高
评定圆度误差 被测实际要素
圆:内外交替至少四点接触 平面:三高夹一低、三低夹一高或高低
交叉(P114)
EXIT
S 评定平面度误差
第3章 形位公差与检测
互换性与测量技术
三、各项形状公差带(P86)及相应的形状误差测量方法 被测要素:为直线、平面、圆和圆柱面。 形状公差带的特点:不涉及基准,它的方向和位置均是浮动的,只能控制
公差1_第三章 形状公差和位置公差

第三节 形位公差的标注
图3-25 用符号表示附加要求
第三节 形位公差的标注
5)全周(轮廓)符号的标注:对适用于视图所示的所有轮廓线或轮 廓面的形位公差要求,可在公差框格指引线的弯折处画一个细实 线小圆圈,如图3-26所示。
图3-26 全周符号的标注
第三章 形状公差和位置公差
第一节 基本概念 第二节 形位误差和形位公差 第三节 形位公差的标注 第四节 形位误差的检测
第一节 基本概念
一、形位公差标准 二、形位公差的特征项目及其符号
在GB/T1182—1996中规定了形位公差的特征项目及其符号,见 表3⁃1。
第一节
基本概念
表3-1 形位公差的特征项目及其符号
第二节 形位误差和形位公差
一、形状误差和形状公差
1.形状误差 单一实际要素对其理想要素的变动量。
图3-6 最小条件
第二节 形位误差和形位公差
2.形状公差 单一实际要素的形状所允许的变全量。
二、位置误差和位置公差
1.位置误差 关联实际要素对其理想要素的变动量。 2.位置公差 关联实际要素的位置对基准所允许的变动全量。
第三章形状公差和位置公差第一节基本概念第二节形位误差和形位公差第三节形位公差的标注第四节形位误差的检测第一节基本概念一形位公差标准二形位公差的特征项目及其符号在gbt11821996中规定了形位公差的特征项目及其符号见第一节基本概念表31形位公差的特征项目及其符号第一节基本概念表31形位公差的特征项目及其符号三形位公差的代号标准规定在技术图样中形位公差采用形位公差代号标注
6)理论正确尺寸的标注如图3-27所示,在尺寸数字之外加细线方 框。
第三节 形位公差的标注
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
最大实体状态下 t≥0
最大实体实效边界 dfe ≤ dMV=dmax+t1 dmin ≤ da ≤ dmax
合格条件
习题:
如下图所示,若被测孔的形状正确。(1)测得其实际尺寸 为φ30.0lmm,而同轴度误差为φ0.03 mm,求该零件的最 大实体实效尺寸、体外作用尺寸。(2)若测得实际尺寸为 的φ30.02mm,同轴度误差为φ0.05 mm,问该零件是否合 格?为什么?(3)可允许的最大同轴度误差值是多少?
m
主参数L/D
一、形位公差标准
●
公差值:
一、形位公差标准
●
公差值
一、形位公差标准
●
未注形位公差值规定(GB/T1184-96)
对于形位公差要求不高,并且用一般的机械加工方
法和加工设备都能保证的加工精度,不必将形位公差在
图样上注出,未注不等于没有要求。
国标规定了三个等级:H、K、L
一、形位公差标准
第五节 形位公差的标准化与选用
一、形位公差标准
◆ 形位公差标准(GB/T1184-96)
●
圆度、圆柱度: 0,1,2,3…12 共13级 高 低 :共12级 1,2,3…12 共12级 高 低
●
一、形位公差标准
●
圆度、圆柱度公差值(部分摘录):
m
主参数d/D
一、形位公差标准
●
直线度、平面度公差值
(5)最小实体实效边界(LMVB) 尺寸的边界。
二、 独立原则(IP)
独立原则是指图样上给定的形位公差与尺寸公差相互 独立无关,分别满足要求的原则。 实际要素的尺寸由尺寸公差控制,与形位公差无关; 形位误差由形位公差控制,与尺寸公差无关。 独立原则主要用于尺寸精度和形位精度要求都较严, 且需要分别满足要求的情况。
20(dM) 20.1(dMV)
(4)实际尺寸必须在最大实体尺寸和最小实体尺寸之间。
(二)最大实体要求
4、合格条件:用公式表示
Da f D fe DMV Dmin t 孔: Dmin DM Da DL Dmax
d a f d fe d MV d max t 轴: d max d M d a d L d min
一、术语及其意义
1. 局部实际尺寸(Da,da)
指在实际要素的任意正截面上,两对应点之间测得的距离。
Da2
Da1
Da3
da1
da2
da3
一、术语及其意义
2. 作用尺寸
体外作用尺寸 体外作用尺寸(dfe、Dfe) 在被测要素的给定 长度上,与实际轴体外相接的最小理想孔或与实际孔体外相 接的最大理想轴的直径。对单一要素,体外作用尺寸即作用 尺寸,是由实际尺寸和形位误差综合形成的。 dfe=da+f Dfe=Da-f
孔和轴的最小实体尺寸分别用 DL、dL表示。
DL = Dmax dL= dmin
一、术语及其意义
4. 最大实体实效状态、尺寸
最大实体实效状态(MMVC) 在给定长度上,实 际要素处于最大实体状态,且其中心要素的形状或 位置误差等于给出公差值t时的综合极限状态。 MMVC
0.1 M
20(dM)
20.1(dMV)
第四节
公差原则
第四节 公差原则
公差原则就是处理尺寸公差与形位公差之间关系的原则。
GB/T4249-1996和GB/T16671-1996规定了形位公差与
尺寸公差之间的关系。 独立原则 :图样上给定的尺寸公差与形位 公差相互独立无关。 包容要求
公 差 原 则
最大实体要求
相关要求 最小实体要求 可逆要求
3、最大实体要求的特点
(3) 被测要素的实际尺寸偏离最大实体尺寸时,其偏离 量可补偿给形位误差,允许的形位误差等于图样上给定 直线度/mm 的形位公差值与偏离量之和。
19.7(dL)
0.4 0.3 0.2 0.1
20.1(dMV)
0.4
19.7(dL)
0.3 0.2 0.1 0
实际尺寸/mm
E
(一)包容要求
3、动态公差图:
19.97(dL)
标注
直线度/mm 0.03
0.02
0.03
0.01
2
0
实际尺寸/mm
最大实体边界
直线度误差的动态变动范围
(一)包容要求
3、动态公差图:
实际尺寸及允许的误差 被测要素实际尺寸 允许的直线度误差
20
2、标注 (适用于中心要素)
在图样上标注时,应在形位公差值后加注符号
(三)最小实体要求
4、合格条件:用公式表示
D a f D fi D LV D max t 孔: D min D M D a D L D max
d f d d d t a fi LV min 轴: d max d M d a d L d min
实效尺寸举例
一、术语及其意义
实效尺寸举例
一、术语及其意义
5. 理想边界
(1)理想边界 由设计给定的具有理想形状的极限包 容面,用于综合控制实际要素的尺寸偏差和形位误差。 (2)最大实体边界(MMB) 尺寸为最大实体尺寸的边界。 尺寸为最大实体实效
(3)最大实体实效边界(MMVB)
尺寸的边界。
(4)最小实体边界(LMB) 尺寸为最小实体尺寸的边界。 尺寸为最小实体实效
最小实体要求仅用于中心要素,应用最小实体 要求的目的是保证装配互换。
(四)可逆要求
1、定义:可逆要求是一种反补偿要求
●最大(最小)实体要求均是实际尺寸偏离最大(最小) 实体尺寸时,允许其形位公差值增大,即可获得一定的补 偿量。 可逆要求则表示,当形位公差值小于其给定公差值时, 允许其实际尺寸超出极限尺寸。但两者综合所形成的实 际轮廓,仍然不允许超出其相应的控制边界。
公差等级 应用举例
6
7
普通机床导轨、卧式铣床、镗床工作台
机床床头箱安装面、摇臂钻床工作台、减速器壳体结合面
8
机床一般传动箱定位面
表2 圆度、圆柱度应用举例
公差等级 6 7 8 应用举例 机床主轴轴承孔、轴承支撑轴颈 减速器轴承孔、一般传动轴轴颈 拖拉机、柴油机等轴承孔、传动轴轴颈
孔和轴的最大实体尺寸分别用 DM、dM表示。
DM = Dmin dM = dmax
一、术语及其意义
3. 最大(小)实体状态、尺寸
最小实体状态(LMC) 实际要素在给定长度上处处 位于极限尺寸之内,并具有材料量最少时的状态,称 为最小实体状态。 最小实体尺寸(LMS) 实际要素在最小实体状态下 的极限尺寸,称为最小实体尺寸。
直线度和平面度未注公差值(GB/T1184-96) m
垂直度未注公差值
m
二、形位公差的选择原则
1、形位公差项目
公差项目 公差值
2、形位公差等级
3、公差原则
公差原则 基准
4、基准
确定形位公差值的方法有类比法和计算法。通常多按类比法 原则:在满足零件功能要求前提下,选取最经济的公差值。
二、形位公差的选择原则
最大实体要求仅用于中心要素,应用最大实体 要求的目的是保证装配互换。
(三)最小实体要求
1、定义
● 被测实际要素的实体遵循最小实体实效边界; 要求被测要素实际轮廓不得超出该边界,即其体内作用 尺寸不应超出最小实体实效尺寸dLV ; ● 当其实际尺寸偏离最小实体尺寸时,允许其形位误差值 超出在最小实体状态下给出的公差值; ● 局部实际尺寸在最大实体尺寸和最小实体尺寸之间。
的几何关系。 作用尺寸是被测要素的局部实际尺寸与形位误差的综合结 果,表示其在装配时起作用的尺寸。
一、术语及其意义
3. 最大(小)实体状态、尺寸
最大实体状态(MMC) 实际要素在给定长度上处处 位于极限尺寸之内,并具有材料量最多时的状态,称 为最大实体状态。 最大实体尺寸(MMS) 实际要素在最大实体状态下 的极限尺寸,称为最大实体尺寸。
三、相关原则
相关原则:图样上给出的尺寸公差和形位公 差相互有关的公差要求。
(一)包容要求
(二)最大实体要求
(一)包容要求
1、定义:
要求实际要素应遵守最大实体边界(MMB),其局部实际 尺寸不得超出最小实体尺寸的一种公差要求。
2、标注方法:
当采用包容要求时,应在被测要素的尺寸极限偏差或公差 带代号后加注“ E ”符号。(仅用于形状公差)
端面圆跳动
圆柱度
1、形位公差项目的选择
图例3 机床导轨:平行度 保证运动精度
2、形位公差等级的确定
形位公差等级的选择原则 形状公差< 定向公差 <定位公差 ● T > t > Ra (尺寸公差值>形位公差值>粗糙度)
●
原则一
3.2
0.01
原则一
原则二
2、形位公差等级的确定
★ 经验法:
表 1 直线度、平面度应用举例
形位公差选用原则
在保证零件功能要求的前提下,应尽量使形位
公差项目减少,检测方法简便,以获得较好的经
济效益。
1、形位公差项目的选择
考虑功能要求、几何特征选择 图例1
同轴度 轴②、⑤
同轴度 (6-内外径)
对称度 (轴键槽)
1、形位公差项目的选择
考虑功能要求、几何特征选择 图例2:轴颈 圆柱度、端面圆跳动 ——保证旋转精度
19.99 19.98 19.97
0
0.01 0.02 0.03
(一)包容要求
4、合格条件:用公式表示
孔:
Da f D fe DM Dmin Da DL Dmax
轴:
d a f d fe d M d max d a d L d min