壁虎脚机器人能飞檐走壁
壁虎为什么能攀檐走壁?
壁虎为什么能攀檐走壁?
壁虎能够攀檐走壁是由于它们特殊的足部结构和附着机制。
1.粘附力:壁虎的脚底有许多细小而柔软的结构,称为趾盖。
这些趾盖上覆盖着细小而密集的毛状结构,每个毛状结构
都有很多细小的分支,形成了更大表面积。
壁虎利用这些
趾盖和毛状结构,通过静电吸附和分子间力量实现了粘附,可以牢固地附着在各种平滑表面上。
2.覆盖角度:壁虎的趾盖是角度向后倾斜的。
这种倾斜角度
使趾盖能够更好地嵌入表面的细微凹凸中,增加了接触面
积和附着力。
3.自洁作用:壁虎的趾盖上的毛状结构还起到自洁作用,可
以去除尘土和污垢,保持粘附能力。
通过趾盖的附着机制,壁虎能够利用静电力和分子间力永久附着在垂直表面或倒挂的天花板上,从而实现攀爬。
这使得它们能够在各种环境中自由移动,包括墙壁、天花板、树干和其他垂直表面。
壁虎的这种附着能力对于捕食、逃避敌害和扩展活动范围非常有益。
探究壁虎之飞檐走壁

探究壁虎之飞檐走壁
壁虎大抵有两个作用。
其一:可以入药;其二:可以吓唬那些矫情的女人!
当然我对壁虎的飞檐走壁的能力是特别好奇。
有很多朋友问过我壁虎为什么有这种超能力。
作为一个学物理的我肯定不能说不知道,就胡说八道的解释:壁虎的四只脚就像四个碗,当壁虎的脚接触到墙壁,把“碗”里的空气排出,这样就与外面的大气形成负压,如此如此壁虎就能在墙壁如履平地。
当时还一本正经,自以为是,但现在才知道自己想错了,真是学海无涯,你永远也不能探究真相。
那么,正确的解释是怎样的呢?
其秘诀在于壁虎脚上的细毛。
这些细毛的尺寸都在纳米级别,当与墙壁接触时,便于墙壁产生范德瓦尔斯力(即分子间的作用力),就是这个力使壁虎能够飞檐走壁。
如果真是这样,以后科学家可以研制出纳米手套和脚套,人类距飞檐走壁的神话也就不远了。
当然那时肯定会忙坏我们的警察叔叔!。
资料1
仿生壁虎脚美国科学家表示能够像蜘蛛侠一样在建筑物上攀爬将在不久后成为现实。
目前,科学家正使用一种特殊材料制造粘性手套和鞋子,能够让穿戴者粘在墙壁上并任意攀爬。
现已在一个小型机器人身上成功测试。
简介壁虎脚机器人能飞檐走壁斯坦福研究设计中心副主任、机械工程教授马克·卡特科斯基领导的研究小组和美国其他大学合作,经过研究壁虎脚趾的构造,历时5年制造出一种黏脚机器人——Stickybot,其能在光滑的玻璃墙壁上行走自如。
原理他们从壁虎身上获得灵感,开发出一种新型织物,现已在一个小型机器人身上成功测试。
测试中,机器人顺利在玻璃、金属等光滑表面攀爬。
工程师希望将他们的设计“按比例放大”,为人类打造蜘蛛侠般的攀爬装备。
据悉,这项研究是一项代号“Z-Man”的计划组成部分。
壁虎之所以具备藐视地心引力的能力归功于脚趾上的微毛。
微毛能够增大接触面,形成一种“单向粘合剂”。
壁虎每爬行一部都可产生这种粘力,但只要朝其他方向移动,粘力便消失。
过去10年时间里,技术人员一直潜心研究,开发强度足以实现垂直攀爬的人造粘性材料。
经过不懈努力,美国加利福尼亚州斯坦福大学的研究人员最终开发出一种类似橡胶的材料,上面覆盖数千根微小的聚合纤维用以模拟壁虎的微毛。
壁虎的微毛被称之为“刚毛”,直径只有人发的十分之一。
壁虎脚趾包含很多学问,堪称一种干性黏合剂。
壁虎脚趾上有数百个拍状突起,称为皮瓣,每个皮瓣上都生有数百万刚毛,比人的头发要细10倍。
在显微镜下面,能看到每一个刚毛末端又分成数百个直径只有几百纳米的更细的铲状丝,称为铲状匙突(spatulae),能和攀爬物表面的分子发生引力作用。
壁虎脚趾上细丝和墙壁分子引力之间的这种相互作用称为范德华力,这种引力能使它在玻璃上仅用一个脚趾就支撑起全部身体重量。
卡特科斯基说,这种“黏合剂”还是单向的,只有向一个方向拉时,才能黏紧,而从另一个方向,则很容易取下来。
研究小组用微型模具制出一种类似橡胶的多聚材料微丝,做成黏合剂涂层,涂在为Stickybot专门制作的四只脚上。
Z Man项目 助你飞檐走壁

Z Man项目助你飞檐走壁壁虎是一种很有趣的小生灵,它不仅会默默的在墙角捕食可恶的蚊子,它还身负一项非凡绝技——飞檐走壁。
壁虎几乎可以灵活的爬上任何平面,即使是像玻璃这样表面光滑的材料。
DARPA(美国国防部高级研究计划局)从中获得启发,创立一名叫Z Man开发项目,通过深入研究壁虎的指尖结构,从而开发出一项新技术或装备,让人类也能像壁虎那样轻松爬上各种平面。
现在,Z Man项目研究结果出来了,确实让人非常激动。
壁虎的指尖设计非常精妙。
在它的每个指头上,都有着无数非常微小的“毛”,科学家称之为刚毛。
此外,在每根刚毛的末端,都有一个小“板”,称为“spatulae”,当壁虎爬行时,与接触面直接接触的部分就是spatulae。
Spatulae在分子间范德华力的作用下,会自动附着和脱离爬行面。
壁虎可以在任意平面上爬行的秘密正是在这里:达到分子尺度的spatulae与接触面相互作用,借助分子间作用力(范德华力)来支撑自身的重量。
显然,DARPA想通过学习壁虎的爬墙技能,发明某种新设备,让人类也能像壁虎那样飞檐走壁。
这样的话有利于士兵在城市执行某些任务(例如在碟中谍4中,阿汤哥爬迪拜塔那一幕)。
目前DARPA 已经开发出含有无数像刚毛和spatulae的设备,可以轻松支撑起一个人的重量。
在下一步的开发中,DARPA希望可以让它能在多个方向上爬行,不管是在垂直方向还是在水平方向。
近日,DARPA演示了他们的研发成果。
在演示中,一个重达218磅(99kg)的演示人员背负着50磅(23kg)的负载,在新设备的帮助下,顺利爬上了25英尺(7.6M)高的玻璃幕墙。
这样的新设备可以让士兵抛弃往日的那种笨拙,沉重,不稳定的攀爬设备,从而让士兵活动更加灵活。
事实上,这已经不是壁虎第一次启发人类科技了。
过去就曾启迪人们发明了壁虎一样的“爬墙机器人”,现在则是启发科学家发明攀墙可穿戴设备了。
仿生壁虎脚掌,成就防滑系数最高的防滑鞋套
仿生壁虎脚掌,成就防滑系数最高的防滑鞋套生活中有些现象常常令人困惑不解,例如,你有没有想过一种长约10厘米、背呈暗灰色的爬行纲四足小动物壁虎,为什么能在光滑如镜的墙面或天花板上穿梭自如,捕食蚊、蝇、蜘蛛等小虫子而不会掉下来呢?多少年来,人们对壁虎飞檐走壁的秘诀一直众说纷纭。
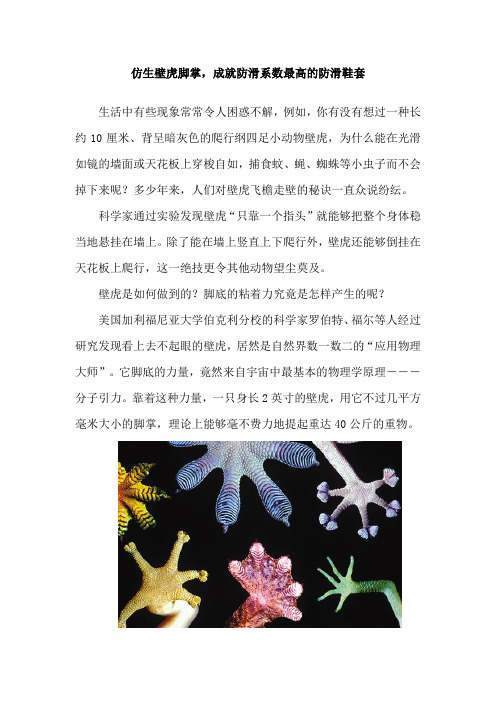
科学家通过实验发现壁虎“只靠一个指头”就能够把整个身体稳当地悬挂在墙上。
除了能在墙上竖直上下爬行外,壁虎还能够倒挂在天花板上爬行,这一绝技更令其他动物望尘莫及。
壁虎是如何做到的?脚底的粘着力究竟是怎样产生的呢?美国加利福尼亚大学伯克利分校的科学家罗伯特、福尔等人经过研究发现看上去不起眼的壁虎,居然是自然界数一数二的“应用物理大师”。
它脚底的力量,竟然来自宇宙中最基本的物理学原理―――分子引力。
靠着这种力量,一只身长2英寸的壁虎,用它不过几平方毫米大小的脚掌,理论上能够毫不费力地提起重达40公斤的重物。
那什么是分子引力呢?分子引力也叫范德瓦尔斯力,是中性分子彼此距离非常近时产生的一种微弱电磁引力。
壁虎的每只脚底部长着数百万根极细的刚毛,而每根刚毛末端又有约400根至1000根更细的分支。
这种精细结构使得刚毛与物体表面分子间的距离非常近,从而产生分子引力。
虽然每根刚毛产生的力量微不足道,但累积起来就很可观。
在壁虎脚趾微结构的启示下,法国科研人员开始研究一种具有超级附着技术的防滑鞋套,历时四年,法国TIGERGRIP泰克防滑鞋套终于诞生!其最大的特点就是特殊的底部纹路设计是仿生壁虎的脚掌,即使是在湿润或者油腻的地面也能产生强大的抓地能力,防滑效果显著。
经欧洲权威机构检测,法国TIGERGRI P泰克防滑鞋套的防滑系数超过欧洲标准,是现在防滑系数最高的防滑鞋套!同时获得法国专利,并通过多项权威技术认证、被欧盟委员会明确定义为高标准的必备防砸防滑产品!。
飞檐走壁鞋——模仿壁虎的爬墙术
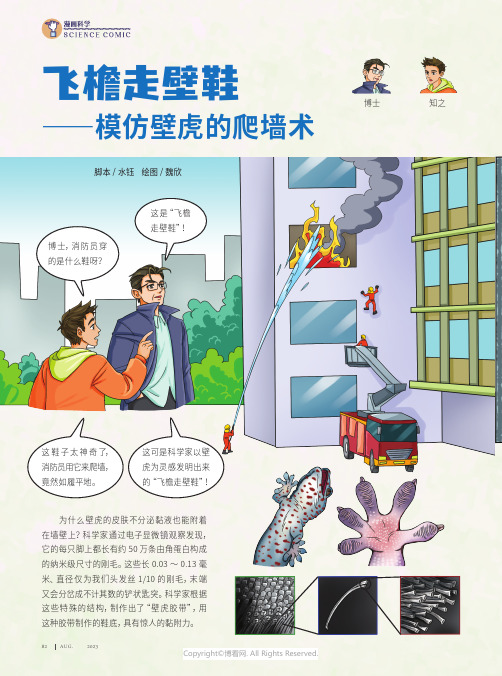
脚本/水钰 绘图/魏欣飞檐走壁鞋为什么壁虎的皮肤不分泌黏液也能附着在墙壁上?科学家通过电子显微镜观察发现,它的每只脚上都长有约50万条由角蛋白构成的纳米级尺寸的刚毛。
这些长0.03~0.13毫米、直径仅为我们头发丝1/10的刚毛,末端又会分岔成不计其数的铲状匙突。
科学家根据这些特殊的结构,制作出了“壁虎胶带”,用这种胶带制作的鞋底,具有惊人的黏附力。
知之博士——模仿壁虎的爬墙术博士,消防员穿的是什么鞋呀?这是“飞檐走壁鞋”!这鞋子太神奇了,消防员用它来爬墙,竟然如履平地。
这可是科学家以壁虎为灵感发明出来的“飞檐走壁鞋”!202382AUG.Copyright ©博看网. All Rights Reserved.未来,这种材料会被应用于更多的场景中,提高人们在各种地形下的运动效率,带来更多的便利。
(责任编辑 / 张丽静 美术编辑 / 韦英章)壁虎能够在墙壁、玻璃等粗糙或光滑的表面上行走,是因为其脚上极微小的匙突会和接触面产生范德华力。
范德华力(又称分子作用力)是产生于分子或原子之间的静电相互作用,虽然能量非常微小,但因为壁虎的匙突众多,积少成多就能承载壁虎自身的重量了。
这种黏附力不是只靠垂直于接触面的压力,更多的是依靠平行于接触面的拉扯,而当这种拉力超过某一临界角时,刚毛便能轻松地与接触面分离,依靠这一原理,壁虎便能在天花板上行动自如。
壁虎的刚毛具有自我清洁的能力,每一撮刚毛之间确实存在空隙,不过施加于刚毛之间的每一次横向拉扯都会将空隙间的灰尘推出,因此壁虎的脚掌可以一直保持干净的状态。
扫描二维码,畅想未来,将有机会获得精美礼品畅未来碳纳米管阵列“壁虎胶带”的工作原理为什么壁虎脚上的刚毛能提供如此强大的黏附力呢?这就不得不提范德华力了!83Copyright ©博看网. All Rights Reserved.。
为什么壁虎能“飞檐走壁”?
为什么壁虎能“飞檐走壁”?壁虎(Geckos)是古老的家族成员,它们好像不需要它们“飞檐走壁”这种惊人的能力来存活。
事实上,它们是如此灵活机敏,以至于它们不仅仅能够走在垂直的材料上,而且还可以倒立行走。
对此,有很多因素起作用,下面我们来慢慢分析它们能够飞檐走壁的原因:1、壁虎的脚趾:壁虎具有独特的脚趾,它们有五指,而且每只脚的脚趾外的面积比内部大,这就让它们更容易靠在垂直的墙壁上,借助脚趾掌握住表面,就像人类抓住悬崖裂缝一样,也能够在墙上壁虎步移动,并且通过用力把脚压在物体表面上,使物体表面形成一种凹凸结构,从而获得更多的支撑力。
2、壁虎脚趾中的微纳米特别小:壁虎脚趾中的微纳米特别小,具有极强的容量,它的厚度只有空气的120分之一,可以使脚趾接触表面的面积变大,减少摩擦力,从而达到更好的攀爬效果。
3、毛背粘性:几乎所有的壁虎都有毛背,它能够强大的粘合力,可以使壁虎能够攀爬除了纤细的墙壁,甚至是平滑的表面,而且它们的毛背具有缓冲效果,可以避免它们与表面发生过度摩擦,它不仅能够吸附空气中的灰尘,而且能够吸收空气中的水分,使其得到更多的粘性,这样它们就可以更自如的在墙上飞檐走壁。
4、复合粗糙的墙表面:壁虎也可以与多孔的墙表面紧密粘合,只要有足够的空隙,它就可以将脚趾插入孔隙中,锁住它们,从而实现在墙上“飞檐走壁”。
从上面可以看出,壁虎可以使用它们自身脚趾、毛背、微纳米、抓爪和复合粗糙表面密切联系起来,这是它们“飞檐走壁”的精妙背后机理。
在磁力、表面张力和摩擦之间建立不可或缺的关系,它能够把这些影响因素和它们自身的能力结合起来,实现它们走在墙上的惊人技巧。
壁虎已经从古至今被大家所佩服,它们的这种能力对我们来说绝对令人敬佩,它给我们的生活增添了许多乐趣!。
壁虎机器人的意思-壁虎机器人是什么意思

壁虎机器人的意思|壁虎机器人是什么意思基本解释壁虎机器人-简介壁虎机器人是指根据仿生学原理,模仿壁虎,设计出的一种机器人。
这种机器人能吸附在墙上行走、代替人类来执行反恐侦查、地震搜救等“高难度”的任务。
美国2006年,美国斯坦福大学科学家研制出的壁虎机器人,能在光滑如镜的垂直玻璃墙壁上行走如飞。
这是科学家模仿自然界中的壁虎为它设计的吸力手在发挥作用。
原理参与研制这种机器人的科学家MarkCutkosky解释了这种神奇吸力手的原理,在每个吸力手上,都有数百万根由人造橡胶制造的毛发,每根细毛的直径大约只有500个纳米左右,比人类的毛发还细很多,每根这种毛发的长度则只有不到2微米,这使得“粘人”的吸力手能非常的接近玻璃壁的表面,这样的结构还能够使得人造橡胶毛发中的分子和玻璃壁分子的距离异常接近。
此时,两者的分子们之间会产生一种奇异的自然现象,分子弱电磁引力,也叫“范德华力”。
每一对这种力大约可以帮助毛发产生抓起一只蚂蚁的力量。
虽然每一对力并不大,但是数百万根毛发产生的这种吸力却能够产生惊人的力量。
根据斯坦福大学分子物理学科学家们的研究,2平方毫米大小内的100万根这样的毛发就能够支持提起20公斤重量。
所以要让机器人能够附着在直壁上,吸力手只需要增大分子接触面。
在每根毛发的末梢,还有上千根更加细小的毛发分枝,每根毛发分枝的前端又有一个分叉。
无数的这种“范德瓦尔斯力”集合起来,“粘人”机器人也就自然能在墙壁上行走了。
事实上,壁虎也是使用了手掌上数百万级的被称为“刚毛”的毛发完成同样的工作的。
发展由于“粘人”机器人的爬墙能力并不像此前,利用真空吸盘靠大气压力吸附在垂直壁上的机器人那样依赖大气压,所以这种新机器人在将来可以用在太空探索、空间卫星维修和特殊环境的救险中。
此外“粘人”机器人也引起了美国军方的关注,他们希望能够进一步开发这种产品,让它们能为特种作战的士兵提供爬行手套和爬行服装。
中国2011年南京航空航天大学就研发出了能代替人来执行探测,拍摄等任务的仿生壁虎机器人,除了外形长的像壁虎,这个仿壁虎机器人还能代替人类来执行反恐侦查、地震搜救等“高难度”的任务,并且受邀参加了国家“十一五”重大科技成就展。
仿生机器人壁虎

“神行者”在天花板下快速行走珠海新概念航空航天器有限公司的科技人员认为:人类之所以能够走跑跳, 绝非仅仅是因为人类有一双脚,壁虎也一样,脚只是生物测量传感综合分析运动系统的执行终端而已。因此,仅 仅研究和模仿壁虎的脚及其表面能力是东施效颦,不可能造出有实用意义的机器壁虎。通过长期的探索研究,珠 海新概念航空航天器有限公司的科技人员提出并建立了机器壁虎创新科学理论及其实现技术,而机器壁虎“神行 者”则是基于该理论及其实现技术的初步产物。
谢谢观看
这项发明可不仅仅是为了乐趣,Mark Cutkosky表示,由于“粘人”机器人的爬墙能力并不像此前,利用真 空吸盘靠大气压力吸附在垂直壁上的机器人那样依赖大气压,所以这种新机器人在将来可以用在太空探索、空间 卫星维修和特殊环境的救险中。
此外“粘人”机器人也引起了美国军方的,他们希望能够进一步开发这种产品,让它们能为特种作战的士兵 提供爬行手套和爬行服装。
虽然每一对力并不大,但是数百万根毛发产生的这种吸力却能够产生惊人的力量。根据斯坦福大学分子物理 学科学家们的研究,2平方毫米大小内的100万根这样的毛发就能够支持提起20公斤重量。所以要让机器人能够附 着在直壁上,吸力手只需要增大分子接触面。
在每根毛发的末梢,还有上千根更加细小的毛发分枝,每根毛发分枝的前端又有一个分叉。无数的这种“范 德瓦尔斯力”集合起来,“粘人”机器人也就自然能在墙壁上行走了。事实上,壁虎也是使用了手掌上数百万级 的被称为“刚毛”的毛发完成同样的工作的。
仿生机器人壁虎
20xx年由珠海新概念航空航天器有限公司研制的机器人
目录
01 神月15日由珠海新概念航空航天器有限公司李晓阳博士和他领导的研究组研制成功 的机器人。
神行者
启发
理论研究方 向
为什么壁虎能“飞檐走壁”
为什么壁虎能“飞檐走壁”壁虎是一种生活在人类社区中的爬行动物。
它们身体长而扁平,眼睛大而突出,四肢短而有力。
而最让人们惊异的,就是壁虎可以“飞檐走壁”,这种技能让它们在人们的印象中留下了深刻的印象。
那么,为什么壁虎可以这么高超的技能呢?这背后隐藏的生物学和物理学原理是什么?首先,我们需要了解壁虎的身体结构。
它们身体表面覆盖着无数细小的毛状鳞片,这些鳞片上密布着许多具有弯曲趾爪。
壁虎并没有像其他爬虫类那样,通过爪子来爬行,而是通过这些趾爪紧紧贴着墙面来行走。
这些趾爪也是壁虎“飞檐走壁”的关键。
在趾爪的表面,有许多黏性分泌物,这些分泌物保持着与墙面接触的牢固性。
由于壁虎趾爪表面的黏性和毛状鳞片的灵活性,壁虎能够在墙面上像人类在地面上走路一样自如地前进。
但趾爪黏性也有限制:壁虎无法在水平面或者过于光滑的表面上行走。
因为当黏性分泌物与墙面完全接触时,空气无法进入它们之间的缝隙。
当壁虎试图将趾爪从这些表面上移开时,空气无法进入分泌物和墙面之间的缝隙。
这就会产生一个巨大的压力,足以使得黏性分泌物失去其粘附性。
另一方面,在生物学上,壁虎趾爪上的毛状鳞片是有规律排列的。
这种排列可以最大化趾爪与墙面的接触面积,同时减小趾爪移动时与墙面之间的摩擦力。
这意味着壁虎可以减小在移动时需要消耗的能源,从而更加经济高效地爬行。
此外,壁虎的身体构造和生理机能也为它们“飞檐走壁”提供了便利。
壁虎的身体非常柔软,可以在狭窄、曲折的墙角和缝隙中自如前进,而且壁虎非常灵敏,能够快速做出反应,适应各种环境和情况的变化。
所有这些因素,都使得壁虎能够轻松地在墙上、屋顶上、甚至树枝上“飞檐走壁”。
通过了解壁虎身体的构造和行动原理,我们可以不同角度去理解它们这种独特的行为。
同时,对于工程和科技的应用,如果能够从壁虎身上找到灵感和启发,也可能会带来更多惊人的技术突破。
例如,可以仿照壁虎趾爪的设计制造新型材料,或者开发更加高效的机器人技术。
虽然我们仍然有很多关于壁虎行走的问题不明确,但是了解趾爪、鳞片和身体结构的互相作用,以及其与表面的相互作用等联系,可以让我们更深入地理解壁虎的生存技能。
科学产品来源生活的例子

科学产品来源生活的例子
1.在海滨小屋的墙壁处,下榻在这里的度假者看着壁虎快速穿过,他们的眼中不禁闪现出惊奇的眼神。
早在几年前,科学家就认识到:由于壁虎足垫上拥有数百万个分叉的小刚毛,因此使得具备了神奇的飞檐走壁的本领。
现在,科学家正在研制模仿这种神奇力量的一系列超强粘合剂,即壁虎粘合剂。
有了它的发明,爬墙机器人将会相继问世;有了它,友好型头发绷带将可能产生;在未来不久,人们甚至可以凭借采用这种粘合剂制造出一种神奇手套,戴上它就拥有了和壁虎一样飞檐走壁的本领。
到时候,你可以和你的朋友度假的时候,完全可以和这些四足动物好好比试一番。
2.我们知道,当海参受到惊吓以后,它柔软的身体内会分泌出一种特殊的化学物质,这种物质能够在数秒钟之内使它的皮肤变硬,变硬了的皮肤就像一副铠甲一样坚硬。
它这一软硬兼备的本领为科学家们提供了灵感,他们正在研制一种在遇到水之后立即由硬变软的塑料材料。
这种像海参一样软硬兼备的塑料可用于生物医学移植。
例如,可用作大脑的显微电极。
它的潜在应用可能在将来的某天让伟哥遭遇对手。
3.很多动物都可以喷出墨汁,臭味物质,或者体内产生的粪便等。
但这些例子中,我们唯一担心的只会是弄脏我们的衣服。
而对于庞巴迪甲虫就不同了,它们喷出的可是沸腾的,爆炸性的液体。
这种昆虫拥有一种非常复杂精密的防卫器官,包括从它后面特别的旋转喷嘴中射出温度高(华氏212/100度)的有毒化学物质的混合物,其频率甚
至达到了一次喷发就连续喷射70次。
简而言这,它们就像在投掷燃烧弹。
【参考文档】壁虎胶带阅读答案-推荐word版 (20页)
本文部分内容来自网络整理,本司不为其真实性负责,如有异议或侵权请及时联系,本司将立即删除!== 本文为word格式,下载后可方便编辑和修改! ==壁虎胶带阅读答案篇一:壁虎机器人阅读及答案壁虎机器人⑴公元前350年古希腊哲学家亚里士多德在撰写不朽的科学著作《动物的历史》一书时,对壁虎的墙上攀登爬行能力大感惊讶。
生物学家称壁虎是“最能爬墙的动物”。
它能够自如攀墙,倒挂悬梁,几乎能攀附在各式各样的材料上面,甚至在水里、真空环境及太空中都能行走自如,所经之处不留任何痕迹,足下干净利落。
壁虎脚上的“功夫”真可称得上是“自然的杰作”。
几千年来,不少人试图揭开壁虎爬墙的奥秘。
然而,这始终是个谜。
⑵直到最近几年,美、英、俄等国的研究小组才真正揭示了壁虎在墙上爬行的秘密。
这个秘密就是“分子间的作用力”。
科学家在显微镜下发现,壁虎脚趾上约有650万根次纳米级的细毛,每根细毛直径约为200至500纳米,约是人类毛发的直径的十分之一。
这些细毛的长度是人类毛发直径的2倍,毛发前端有100—1000个类似树状的微细分权,每分枝前端有细小的肉趾,能和接触的物体表面产生很微小的分子间的作用力。
壁虎脚上650万根细毛全部附着在物体表面上时,可吸附住质量为133千克的物体,这相当于两个成人的质量。
如果你脚上有这么大的吸附力,你肯定难以抬脚。
既然壁虎的脚上有如此强大的附着力,那么它如何能在15毫秒内抬起脚来迅速奔跑?科学家发现,壁虎脚上的细毛可以调节,当壁虎将细毛与物体表面的角度增加到30度时,两者的作用力大大降低,壁虎就可以顺利抬脚。
壁虎的任何一只脚都可以随时移动。
当然,一次只能移动一只脚,其他脚得作为支撑点。
⑶以现在的科技,人类还没有办法研制出如壁虎脚一模一样的东西。
不过,科学家正在模仿壁虎脚的结构研制新的黏性材料。
201X年年底,科学家推出一项可令许多孩子兴奋得睡不着觉、同时令父母们担心不已的新发明。
这就是利用仿生学原理研制出来的壁虎胶带。
薛龙建:让机器人飞檐走壁
薛龙建和团队研发的迷你软体机器人相对于传统的机器人具有极大的自由度和变形能力,在生产生活、医疗救援、航空航天和军事等领域有巨大的应用潜力。
让机器人飞檐走壁17岁时,薛龙建以优异的成绩考入武汉大学化学基地班,在国内读完了本科、硕士、博士。
2009年,他前往德国攻读博士后,6年后学成回国,从事仿生材料领域的科学研究。
薛龙建有一股狠劲儿,他的座右铭是:科学研究要不断突破、超越、做NO.1(第一)。
当时,我国微型机器人的研究还不够成熟,在结构黏附材料的研发方面、出现了“卡脖子”的设计瓶颈。
薛龙建回国后的第一道难关便是找到适合迷你软体机器人所用的材料。
那时,我国很多迷你软体机器人所用材料是水凝胶,这种材料不耐高温,也不耐低温,导致水凝胶机器人的使用区域受限。
薛龙建和他的课题组克服重重困难,多次实验之后终于敲定:选用硅橡薛龙建:让机器人飞檐走壁文/丽君16胶作为软体机器人的主体材料。
硅橡胶不仅耐高温和低温,还具有耐酸碱不易腐蚀等特点,用硅橡胶制作的软体机器人不受区域限制,而且对人体无害。
解决了第一道难关,紧接着第二道难关又摆在薛龙建面前:当时的迷你软体机器人普遍缺乏足部设计,仅能在粗糙或者具有特殊结构的表面行走,面对光滑或者有水的表面都无能为力。
凭借在仿生材料领域长期积累的研究经验,薛龙建和他的课题组尝试在机器人上引入仿壁虎脚趾刚毛的足部,这样迷你软体机器人便有了自己的“脚”。
而由仿壁虎刚毛的微米三棱柱阵列组成的“脚”,相当于给机器人穿上了最好的“防滑跑鞋”,在粗糙或光滑的平面上均能获得足够的抓地力。
迷你软体机器人的步态也借鉴了壁虎脚的取向黏附能力和尺蠖前后足交替运动模式。
使得机器人在倾斜30度的光滑表面上,实现稳定停泊而不发生滑移。
整整5年,薛龙建和课题组经历了数不清的不眠之夜,最终让迷你软体机器人拥有了“飞檐走壁”的本领。
这款功能强大的迷你软体机器人在国防军事和生产、生活的许多领域将得到广泛应用。
此外,由于软体机器人具有较大的自由度和变形能力,在医疗领域的应用也值得期待。
科学家研制出高科技壁虎靴,飞檐走壁不再是梦
科学家研制出高科技壁虎靴,飞檐走壁不再是梦想象有一天,你可以沿着玻璃幕墙,像蜘蛛侠一样敏捷地穿行在城市的高楼大厦间,唔,这画面实在太美,反正有恐高症的我是不敢看的。
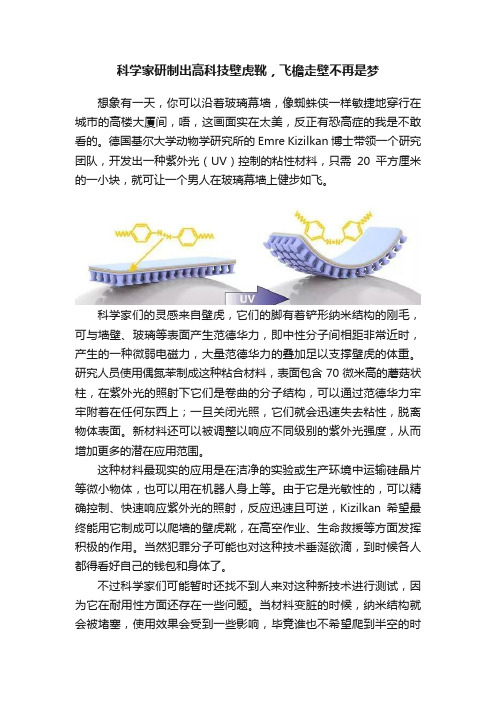
德国基尔大学动物学研究所的Emre Kizilkan博士带领一个研究团队,开发出一种紫外光(UV)控制的粘性材料,只需20平方厘米的一小块,就可让一个男人在玻璃幕墙上健步如飞。
科学家们的灵感来自壁虎,它们的脚有着铲形纳米结构的刚毛,可与墙壁、玻璃等表面产生范德华力,即中性分子间相距非常近时,产生的一种微弱电磁力,大量范德华力的叠加足以支撑壁虎的体重。
研究人员使用偶氮苯制成这种粘合材料,表面包含70微米高的蘑菇状柱,在紫外光的照射下它们是卷曲的分子结构,可以通过范德华力牢牢附着在任何东西上;一旦关闭光照,它们就会迅速失去粘性,脱离物体表面。
新材料还可以被调整以响应不同级别的紫外光强度,从而增加更多的潜在应用范围。
这种材料最现实的应用是在洁净的实验或生产环境中运输硅晶片等微小物体,也可以用在机器人身上等。
由于它是光敏性的,可以精确控制、快速响应紫外光的照射,反应迅速且可逆,Kizilkan希望最终能用它制成可以爬墙的壁虎靴,在高空作业、生命救援等方面发挥积极的作用。
当然犯罪分子可能也对这种技术垂涎欲滴,到时候各人都得看好自己的钱包和身体了。
不过科学家们可能暂时还找不到人来对这种新技术进行测试,因为它在耐用性方面还存在一些问题。
当材料变脏的时候,纳米结构就会被堵塞,使用效果会受到一些影响,毕竟谁也不希望爬到半空的时候紫外光照不到纳米结构上去。
虽然这不会对昂贵漂亮的靴子本身产生什么损伤,但对使用者个人而言损伤可能就比较大了,所以一双没有瑕疵、合脚而又拉风的靴子对勇敢的蜘蛛人来说,实在是太太太重要了。
研究人员在Science Robotics上发表了他们的研究成果。
壁虎脚机器人能飞檐走壁
壁虎脚机器人能飞檐走壁
佚名
【期刊名称】《工业设计》
【年(卷),期】2010(000)012
【摘要】在人类无法到达或危险的地方,我们常常派机器人去执行任务,攀墙附
壁的本事对它们来说必不可少。
美国斯坦福大学机械工程师最近用一种新型黏合剂,给机器人装上仿生壁虎脚,让它们飞檐走壁如履平地。
【总页数】1页(P24-24)
【正文语种】中文
【中图分类】TP242
【相关文献】
1.仿生壁虎脚助人飞檐走壁
2.壁虎胶带:飞檐走壁梦不远?
3.“飞檐走壁”的壁虎
4.弹簧机制助壁虎飞檐走壁
5.美科学家通过5年研究制造壁虎脚机器人
因版权原因,仅展示原文概要,查看原文内容请购买。
NASA壁虎机器人,在太空也要飞檐走壁!
NASA壁虎机器人,在太空也要飞檐走壁!“对于太空的探索总是充满奇趣与挑战。
”太空探测时,航天器有时会突然地剧烈抖动,无论是被飞驰的太空岩石击中,还是控制系统被宇宙射线扰乱,即便是其他情况,宇航员也一定想要有个可以抓住的东西。
NASA 喷气推进实验室,更具体来说是它下属的行星机器人实验室,正在尝试制造一种机器,可以在太空探测过程中,在可能遇到的各种复杂表面上产生一个抓力。
要在太空环境中产生这个抓力,会存在几个问题:•首先,机器人通常要避免不平整的表面,更何况是在火星上随处可见的那种悬崖绝壁上。
•其次,太空是一种挑战地心引力的环境。
“在零重力下,连在表面推动一个磁带都很困难。
”喷气推进实验室的机器人电气工程师 Jaakko Karras 说道。
•而且无重力的情况下是违反牛顿第三定律的,你很难在地面站稳。
对于每一个动作,都有一个相等的反作用力。
所以当你用力时,也会有同样大小的力将你推开。
这不只是微重力的问题。
在低重力环境下,如小行星或彗星,也不适用。
“如果你想要做一些取样工作,一开始钻探,你就有可能随着钻头钻入地面而旋转起来。
”Karras 说。
“自然总是能解决我们周围的问题。
”Karras 说:“一个常见的方法就是仿生学。
”当 Karras 和他的团队在垂直的岩壁上测试攀爬机器人时,蜥蜴恰好从旁边爬过。
但就是这个迅速爬过的小壁虎,让Karras 决定从进化论中寻找攀爬机器人设计的线索。
他团队制造的胶粘剂利用范德华力,这是壁虎能在光滑表面攀爬的原理。
为了应对那些凹凸不平的情况,他的团队制造了可以弯曲伸缩的microspines 抓手。
基于壁虎原理的胶粘剂和microspines 抓手在深层太空中的应用前景很好。
基于壁虎原理的粘合剂已经在国际空间站中开始进行测试。
现在,宇航员能用它来把一些东西固定在内饰板上。
但NASA 考虑把它作为 Velcro 魔术贴的替代品,它不会粘到灰尘或毛发,避免影响国际空间站脆弱的环境。
壁虎飞檐走壁的原理

壁虎飞檐走壁的原理
壁虎是一种常见的爬行动物,它们有着独特的生存方式和行动方式,可以在各种环境中自如地爬行。
壁虎的飞檐走壁的能力,是由其身体结构和生理特点所决定的。
壁虎的脚掌上有着许多微小的肉质突起,这些突起被称为趾盘,可以让壁虎在垂直的表面上附着。
趾盘的表面有着许多微小的毛细管,可以形成分子间的吸附力,从而让壁虎能够在垂直的表面上行走。
此外,壁虎的趾盘还有着弹性,可以让它们在行走时更加灵活。
壁虎的身体结构也有助于它们的飞檐走壁。
壁虎的身体非常柔软,可以让它们在狭小的空间中自如地穿行。
此外,壁虎的尾巴也有着重要的作用,可以让它们在行走时保持平衡。
壁虎的尾巴还可以用来抓住物体,从而增加它们的附着力。
壁虎的生理特点也是其飞檐走壁能力的关键。
壁虎的心脏和呼吸系统非常发达,可以让它们在高处行走时保持平衡和稳定。
此外,壁虎的眼睛也非常敏锐,可以让它们在行走时更加警觉和敏捷。
壁虎的飞檐走壁能力是由其身体结构、生理特点和行动方式所决定的。
壁虎的趾盘、柔软的身体、尾巴和发达的心脏和呼吸系统,都是其能够在各种环境中自如地爬行的关键。
壁虎的飞檐走壁能力不仅是一种生存方式,也是一种独特的生物学现象,值得我们深入研究和探索。
为什么壁虎能“飞檐走壁”

为什么壁虎能“飞檐走壁”
壁虎,人们通常称它为蝎(xiē)虎、爬墙虎。
它还有一个名字叫守宫。
壁虎体形较小,是夜间活动的动物,白天常常躲在屋角或石缝中一动不动。
夏秋的夜晚,我们常能看见它在墙上、窗户上、屋檐下行走自如,专门捕食昆虫。
它怎么能“飞檐走壁”呢?
过去人们认为壁虎的脚趾能分泌某种黏液,使它能粘在天花板、门窗等光滑的表面上。
由于壁虎的趾端扩大,像个盘子,并盖有层片,所以又有人提出壁虎的脚像个吸盘,能使它紧紧地吸附于平滑的物体上。
直到运用电子显微镜,科学家才终于发现了其中的奥秘。
壁虎的脚趾端扩大呈盘状,上有许多细微的由角质蛋白构成的刚毛,每平方毫米达150万根之多。
每根刚毛上有许多像小钩子似的末端,和相对平滑的天花板、玻璃窗产生摩擦力,并且可以用布满细微的小钩状的刚毛的脚轻松地抓住这些物体表面极其细微的突起。
所以壁虎这类动物才能攀援门窗,在天花板等处自由爬行。
除了非凡的爬墙本领之外,壁虎还拥有高超的逃生本领。
当遭遇敌害时,它会飞快地爬行,移入缝隙、角落躲藏。
当情况过分危急时,它会断掉自己的尾巴。
尾
巴离开身体后,神经还起作用,所以尾巴还能在地面上剧烈摆动,吸引敌害注意力,壁虎则趁机逃走。
这种现象叫自弃,是一种重要的适应能力。
壁虎尾巴自动折断是由于尾部肌肉收缩,使尾椎骨分离的结果。
断尾的壁虎还能再生出新的尾巴来。
壁虎在我国分布很广,为常见动物。
它灰白或暗灰带着暗色条纹的身体并不好看,可是它能消灭蚊子、苍蝇、蛾子等害虫,对人类有益。
如果在黄昏以后,看见开始出来活动的壁虎时,不要去捕捉或扑打它。
爬行动物的价值
爬行动物的价值一:宠物二:仿生三:食用四:维护生态“壁虎侠”机器人很难想象出比昆虫更加灵活的生物,他们拥有着与生俱来的能力能够吸附在各种物体的表面,并且能够如同在水平地面行走一样地飞檐走壁。
这点深深的打动了机器人研制者。
昆虫的眼睛具有更高的分辨率,并且能看到比人类视野更宽阔的全景;另一方面,他们能够轻易的适应并融入到瞬息万变的环境中。
这些都为科技的发展,探索的进行和防御的开展提供了很大的参考作用。
美国国防部高级研究计划局最新研制的机器人就是仿生科技的一大见证。
他们借鉴了昆虫和爬行动物的特性,旨在研发出可以漫步地球可以飞檐走壁也可以在别的物体表面行走的机器人。
无论是从外观还是从动作上看,“机器粘人”都像极了壁虎,它运用摩擦牢牢的固定在光滑的物体上;“绝妙攀登者”则像是螳螂,每秒钟可以移动66厘米(相当于其体长的1.5倍)。
英国巴斯大学的研究者同样致力于仿生机器人,模仿能够跳跃的昆虫。
因为缺少肌肉,昆虫不得不依赖于瞬间发力,就像拉直一根弹簧并瞬间放松。
运用这种原理,“机器跳人”借助于自身类似的系统,可以跳跃高达50厘米。
罗德里·阿莫里,机器人的研制者,希望可以研发出改良后的版本,研制出可跳跃可弹动的机器人。
这样一来,就可以不再使用美国航空和宇宙航行局的探测器在火星的表面笨拙的践踏了。
现存最大人工饲养的鳄鱼是叫Yai,它出生于1964年,2000年时它的体长达到了6.03米,?体重1114kg.?它在1989年就进入了吉尼斯世界记录。
爬行动物的经济价值1珍惜种类?? 我国爬行动物400余种,隶属于3目25科125属,占世界爬行动物总数5%,其中我国特有种类113种。
国家一级重点保护动物6中,二级重点保护动物11种,分别占爬行动物总数的1.5%和2.8%。
2生态-环境资源大多数爬行动物属于杂食性或肉食性,在生态系统中充当次级消费者的角色,蜥蜴类和蛇类大量捕食昆虫及鼠类。
许多爬行动物又是肉食目和猛禽的食物及能量来源。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
虎 脚 趾上 细 丝 和 墙 壁 分子 引力 之
: 相 互 作 用称 为范 德 华 力 ,这 种 种
皮 瓣 和 剐 毛 包 含 两层 系统 , 比 首 批 产 品
ES G N D E S I I A
-
该 系 列 处 理 器 还 采 用 了 开 放 标 准 ,放
弃 原 有 的 前 端 总 线 (S ) 改 而 使 用 F B,
P — CI E总 线 。凌 动 E 0 系列 处 理 器 60 就 有 了很 大 的 灵活 性 ,可 面 向 更 多嵌 入 式应用。
BS一6 2l 足 了 嵌 入 式 市 场 功 I 6 2 满
殳 等 领 域 中大 有 所 为 。 备 为新 一 代 的 英 特 尔 凌 动平 台 ,凌 :0 的 性 能 更 佳 , 集 成 度 更 高 , 6O
宅 脚机器 人能飞檐 走 壁
: 人类无 法到达或 危险的地 方,我们 引力 能 使 它 在玻 璃 上 仅 用 一 个 脚趾 就 支
饥器人去执行任务,攀墙 附壁的本事
耗 越 低 、 性 能越 高 、体 积 越 小 、 集成 度 更高 等 需 求 , 表现 为超 低 功 耗 , 性 能优 越 , 大 大 节 省 了 客 户 开 发 资 源 。 该 款 嵌 入 式 电 脑 身 型 小 巧 紧 凑 , 尺 寸 仅 为 15 2 mm x1 5mm x4 2 5 mm , 符 合 工 业 级 环 境 应 用 ,解 除 了开 发 过 程 中狭 小
来说必不可少。美 国斯坦福大学机械 最近用一种新型黏合剂 , 机器人装 给
撑 起 全 部 身体 重量 。卡 特 科 斯 基 说 ,这 种 “ 合剂 ”还 是 单 向的 , 只 有 向一 个 黏
方 向拉 时 ,才 能黏 紧 ,而 从 另一 个方 向 , 则 很容 易取 下来 。
研 究 小 组 用微 型 模 具制 出一种 类似
走 自如。
橡胶的多聚材料微丝,做成黏合剂涂层,
涂 在 为 SilOo 专 门 制 作 的 四 只 脚 上。 tg子 的手掌大 tkb t c
小 ,它在墙壁 上爬 时就 会很稳 定,还 能轻
松地黏附或提起它的脚 , 就像一 只 机器蜥 蜴。
最新 型 黏合 剂仿 照壁 虎 脚趾 上 的
壁虎脚,让它们飞檐 走壁 如履平地。
。
坦 福研 究设计 中心 副主任、机械 工
马 克 ・ 特 科斯 基领 导的 研究 小组 卡
其他大 学合作 ,经 过研究 壁虎脚 趾 : ,历 时 5年 制 造 出一 种 黏 脚 机 器 S i y o ,其 能在 光 滑的 玻璃 墙 tk b t o
匕 工控推出基于英特尔@ 凌动 系统芯片白
期 ,英 特 尔 正式 发布 面 向嵌 入 式 f 特 尔 。凌动 E 0 系 列 系统 英 60 S C )和 英 特 尔 。平 台 控 制单 元 o T 华 北 工 控 同 步 推 出 了 基 于 该 , j 入 式 准 系 统 BS一 6 2 I 该 嵌 I 6 2 。 级 嵌 入 式 电 脑 采 用 华 北 工 控 专 i C一 6 Q, 该 主 板 采 用 英 特 BP 7 7 : 动 E O 6 OS C 和 英 特 尔 。平 o J 元E 0 单 G2 T,处 理 器 频 率 最 大 3 z H 。功 耗 低 、 性 能 好 、 可 适 应 f 应 用 。 华北 工 控 该 款嵌 入 式 电 能 : 用于 多 种嵌 入 式 场 合 , 在 数字 标
媒 体 播放 、车 载 信 息 系统 、 自助
空 间 受限 之苦 , 方便 嵌 入更 多设 备 。
BS 6 2 具有 高 清 晰 的 图像 显示 I一 6 2I 功 能, 支 持 M P G4、H.6 、H.6 E 23 24 等 解 码 格 式 和 MP G2 E 、M P G4 E 、