工业机器人3.3工业机器人标准IO板DSAC651的配置
电子教案-工业机器人工作站系统集成(ABB_周文军)课件-C-01-机器人标准IO板DSQC651的使用

2.用示教器配置 DSQC651板
模拟输出信号AO_01的相关参数配置:
参数名称
设定值
Name Type of Signal
AO_01
Analog Output
Assigned to Unit
Board_10
Unit Mapping
0~15
Analog Encoding Type
Maximum Logical Value Maximum Physical Value
ABB机器人标准I/O板DSQC651的使用
学习内容提要:
本次课通过一个具体的实验来学习DSQC651板: ①先要对DSQC651的数字输入口、数字输出口以及模拟输出口进行硬件接线 ②然后通过示教器配置DSQC651模块,创建数ቤተ መጻሕፍቲ ባይዱ输入信号、数字输出信号和模
拟输出信号,并实现I/O信号的监控及操作。 ③最后用24V稳压电源和对应的指示灯进行数字输入口的测试,用万用表和
DSQC651板载指示灯进行数字输出口的测试,用万用表进行模拟输出口的测 试。
主要需要完成以下3个目标: ①熟悉DSQC651标准I/O板的电路接线 ②熟悉标准I/O口的配置与使用 ③熟悉DSQC651的I/O口的信号测试方法
任务实施步骤:
1.硬件接线 2.用示教器配置 DSQC651板 3.测试DSQC651板的输入输出信号
号的监控及操作的方法 ④ABB机器人标准I/O板的测试方法
Unsigned 10 10
Maximum Bit Value
65535
说明 设定模拟输出信号的名字
设定信号的类型 设定信号所在的 I/O 模块 设定信号所占用的地址
设定模拟信号属性 设定最大逻辑值
3.3工业机器人标准IO板DSAC651的配置

组输入信号就是将几个数字输入信号组合起来使用,用于 接受外围设备输入的BCD编码的十进制数。 此例中,gi1占用地址1~4共4位,可以代表十进制数0-15 。如此类推,如果占用地址5位的话,可以代表十进制数0-31。
其操作如下:
3.3.6定义模拟输出信号AO1
模拟输出信号AO1的相关参数
其操作如下:
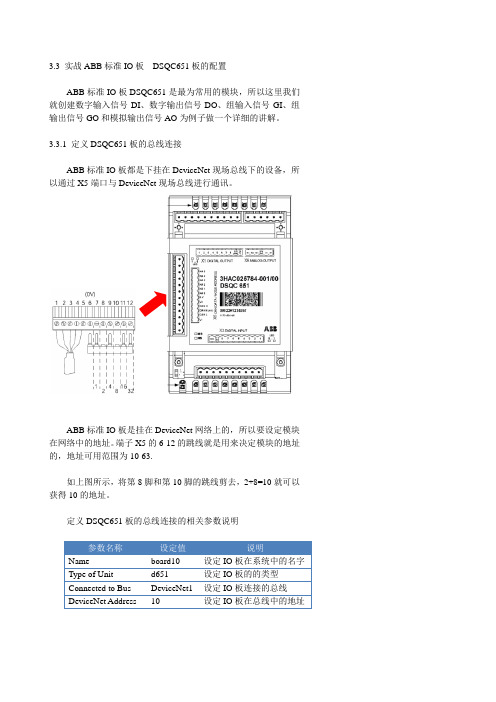
3.3 ABB标准I/O板DSQC651板的配置
ABB标准I/O板DSQC651是最为常用的模块,下面以 创建数字输入信号DI、数字输出信号DO、组输入信号GI、 组输出信号GO和模拟输出信号AO为例。 3.3.1定义DSQC651板的总线连接 ABB标准I/O板都是下挂在DeviceNet现场总线下的设备, 通过X5端口与DeviceNet现场总线进行通信。
DSQC651板的总线连接的相关参数说明
其总线连接操作步骤如下:
3.3.2定义数字输入信号DI1 数字输入信号DI1的相关参数
其操作如下:
3.3.3定义数字输出信号DO1 数字输出信号DO1的相关参数
操作步骤:
3.3.4定义组输入信号GI1 组输入信号GI1的相关参数
组输入信号GI1的状态
组输入信号就是将几个数字输入信号组合起来使用,用于 接受外围设备输入的BCD编码的十进制数。 此例中,gi1占用地址1~4共4位,可以代表十进制数0-15 。如此类推,如果占用地址5位的话,可以代表十进制数0-31。
其操作如下:
3.3.5定义组输出信号GO1 组输出信号go1的相关参数
组输出信号go1的相关状态
工业机器人基础与实用教程 单元四 ABB工业机器人IO通信

ABB标准I/O板DSQC651
各模块接口连接说明: 2、X3端子
X3端子接口包括8个数字输入,端子定义及分配地址见表所示:
X3端子编号
1 2 3 4 5 6 7 8 9 10
使用定义
INPUT CH1 INPUT CH2 INPUT CH3 INPUT CH4 INPUT CH5 INPUT CH6 INPUT CH7 INPUT CH8
0V 未使用
地址分配
8 9 10 11 12 13 14 15
ABB标准I/O板DSQC653
DSQC 653信号板主要提供8个通道的数字量输入信 号、8个通道的数字继电器输出信号的处理。DSQC 653接口如图4-5所示。
图4-5 DSQC 653板接口 1—X1,数字量继电器输出信号接口 2—X5,DeviceNet接口 3—X3,数字量输入接口
数字输入信号di1的相关参数见表所示:
参数名称 Name Type of Signal Assigned to Unit Unit Mapping
设定值 di1
Digital Input Board10 0
说明 设定数字输入信号的名字 设定信号的种类 设定信号所在的I/O模块 设定信号所占用的地址
数字输入信号di1的定义
ABB标准I/O板DSQC652
各模块接口连接说明: 1、X1端子
X1端子接口包括8个数字输出,端子定义及地址分配见表所示:
X1端子编号
1 2 3 4 5 6 7 8 9 10
使用定义
OUTPUT CH1 OUTPUT CH2 OUTPUT CH3 OUTPUT CH4 OUTPUT CH5 OUTPUT CH6 OUTPUT CH7 OUTPUT CH8
4.2 ABB工业机器人IO设定

设定值
ao1 Analog Output board10 0-15 Unsigned 10 10 65535
说明
设定模拟输出信号的名字 设定信号的类型 设定信号所在的IO模块 设定信号所占用的地址 设定模拟信号属性 设定最大逻辑值 设定最大物理值(V) 设定最大位值
任务三:机器人I/O设定
六、设定模拟量输出信号ao1
序号 1 2 3 4 5
型号 DSQC651 DSQC652 DSQC653 DSQC355A DSQC377A
说明 分布式I/O模块 di8、do8、ao2 分布式I/O模块 di16、do16 分布式I/O模块 di8、do8带继电器 分布式I/O模块 ai4、ao4 输送链跟踪单元
任务三:机器人I/O设定
0 1 2 3 4 5 6 7
任务三:机器人I/O设定
一、ABB机器人常用标准I/O板
3. X5端子 X5端子是DeviceNet总线接口,
端子使用定义,如表所示。 其上的编号6~12跳线用来决定
模块(I/O板)在总线中的地址,可 用范围为10~63。
X5端子编号
1 2 3 4 5 6 7 8 9 10 11 12
在调出的“控制面板 – 配置 – I/O - Signal”界 面,单击“添加”按钮
任务三:机器人I/O设定
四、设定数字量输入信号di1
在调出的“控制面板 – 配置 – I/O – Signal – 添 加”界面,双击“Name”
在调出的“Name”界面,在文本框输入“di1”,然 后单击“确定”按钮
任务三:机器人I/O设定
一、ABB机器人常用标准I/O板
3. X5端子
思考:如果你想把该节点的地址设置成20,如何处 理?
标准IO板651板的配置
组输出信号go1的相关参数:
状态1
0
1
0
1
2+8=10
状态2
1
0
1
1
1+4+8=13
Name
go1
设定组输出信号的名字
Type of Signal
Group Output
设定信号的类型
Assigned to Unit
board10
设定信号所在的IO模块
Uni”。
3.3.3定义数字输出信号do1
数字输入信号do1的相关参数:
Name
do1
设定数字输出信号的名字
Type of Signal
Digital Output
设定信号的类型
Assigned to Unit
board10
设定信号所在的IO模块
Unit Mapping
点击“添加”。
双击“Name”
输入“do1”,然后点击“确定”。
双击“Type of Signal”,然后选择“Group Output”
双击“Assigned to Unit”,然后选择“board10”
双击“Unit Mapping”
输入“33-36”,然后点击“确定”。
点击“确定”。
点击“是”,完成设定。
3.3实战ABB标准IO板---DSQC651板的配置
ABB标准IO板DSQC651是最为常用的模块,所以这里我们就创建数字输入信号DI、数字输出信号DO、组输入信号GI、组输出信号GO和模拟输出信号AO为例子做一个详细的讲解。
3.3.1定义DSQC651板的总线连接
ABB标准IO板都是下挂在DeviceNet现场总线下的设备,所以通过X5端口与DeviceNet现场总线进行通讯。
2.3 实战ABB标准IO板-DSQC651板的配置

• 2.单击“添加”。
• 3.对于不同类型的信号,对信号的参数进行填写,填写完成后,点击“确 定”,重启后完成设定。
2.3.6 定义模拟输出信号aol
参数名称 Name Type of Signal Assigned to Unit Unit Mapping Analog Encoding Type Maximum Logical Value Maximum Physical Value Maximum Bit Value
Device Mapping
设定值 gi1 Group Input board10
1-4
说明 设定组输入信号的名字 设定信号的类型 设定信号所在的IO模块
设定信号所占用的地址
• 此例中,gi1占用地址1-4共4位,可以代表十进制数0-15。如此类推,如 果占用地址5位的话,可以代表十进制数0-31
gi1接口
地址1 地址2 地址3 地址4 十进制 数
1
2
4
8
状态1
0
101 2+ Nhomakorabea=10状态2
1
0
1
1
1+4+8=1 3
• 具体步骤如下: • 1.在“控制面板”-“配置-I/O System”画面中,双击“Signal”。
• 2.单击“添加”。
• 3.对于不同类型的信号,对信号的参数进行填写,填写完成后,点击“确 定”,重启后完成设定。
• 2.单击“添加”。
• 3.对于不同类型的信号,对信号的参数进行填写,填写完成后,点击“确 定”,重启后完成设定。
• 2.单击“添加”。
• 3.按照表中的参数填写,填写完成后点击“确定”,重启后,定义 DSQC651板的总线连接操作完成。
【2024版】ABB工业机器人操作与编程课件第3章-工业机器人IO通信

说明 分布式 I/O 模块,di8、do8、ao2
分布式 I/O 模块,di8、do8 分布式 I/O 模块,di8、do8 带继电器
分布式 I/O 模块,ai4、ao4 输送链跟踪单元
二 ABB标准I/O 板
ABB标准I/O板在使用时需要设置相应的输入输出信号参数后才可以正常使用,需要设定的参数包括
使用定义 INPUTCH1 INPUT CH2 INPUT CH3 INPUT CH4 INPUT CH5 INPUT CH6 INPUT CH7 INPUT CH8
0V 未使用
地址分配 0 1 2 3 4 5 6 7
X6接口各引脚定义及地址分配表
X6 端子号 1 2 3 4 5 6
使用定义 未使用 未使用 未使用
模拟输出量 0V 模拟输出量 AO1 模拟输出量 AO2
地址分配
0~15 16~31
X6接口其内部电路如下图所示,方框内部为DSQ651板的接口电路电压输出范围为0~10V 。
DSQC651板X6接口电路图
X5接口为Device Net总线接口,是挂在DeviceNet网络上的,该端口用来设定模块在网络中的地址。 其接口上各引脚的定义见下表,其中,编号6~12的跳线用来决定该I/O模块在Device Net总线中的地址, 使用该模块时必须要设置地址,地址范围在10~63。
1 ABB标准I/O板DSQC651
DSQC651板主要提供8个数字量输入,8个数字量输出和2个模拟量输出信号的处理,如图所示,它 有X1、X3、X5、X6四个模块接口、模块状态指示灯、数字输入信号指示灯及数字输出信号指示灯。
X1 端子号 1 2 3 4 5 6 7 8 9 10
X1接口各引脚定义及地址分配表
【2024版】25-工业机器人应用技术-工单-配置标准IO板DSQC651
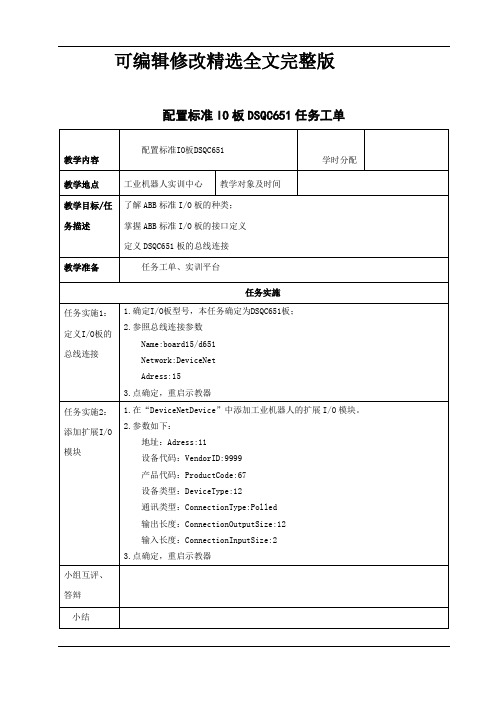
Name:board15/d651
Network:DeviceNet
Adress:15
3.点确定,重启示教器
任务实施2:
添加扩展I/O模块
1.在“DeviceNetDevice”中添加工业机器人的扩展I/O模块。
2.参数如下:
地址:Adress:11
设备代码:VendorID:9999
产品代码:ProductCode:67
设备类型:DeviceType:12
通讯类型:ConnectionType:Polled
输出长度:ConnectionOutputSize:12
输入长度:ConnectionInputSize:2
3.点确定,重启示教器
小组互评、答辩
小结
可编辑修改精选全文完整版
配置标准I
教学内容
配置标准IO板DSQC651
学时分配
教学地点
工业机器人实训中心
教学对象及时间
教学目标/任务描述
了解ABB标准I/O板的种类;
掌握ABB标Leabharlann I/O板的接口定义定义DSQC651板的总线连接
教学准备
任务工单、实训平台
任务实施
任务实施1:
定义I/O板的总线连接
1.确定I/O板型号,本任务确定为DSQC651板;
ABB机器人外部启动配置说明

ABB机器人外部启动配置说明一、外部IO板的配置ABB标准I/O板DSQC652是最为常用的模块,下面以创建数字输入信号DI,数字输出信号DO,组输入信号GI,组输出信号GO为例做一个详细的讲解。
图1-1对DSQC652端子台的外观进行了描述。
图1-2对DSQC652端子台的各个端子与机器人内部地址(Device mapping)关系进行了描述。
图1-1I/0板上X5为Devicenet通讯端子:其中1-5为Devicenet接线端子,7-12为拨码开关分别对应1.2.4.8.16.32(将任意两个短接片剪断,对应端子上的拨码开关值相加即为该Devicenet地址,例如此处将8和10端子短接片剪短,对应的拨码开关值分别为2和8,所以2+8=10,此Devicenet地址为10)。
图1-21、定义DSQC652板的总线连接ABB标准I/O板都是下挂在DeviceNet现场总线下的设备,通过X5端口与DeviceNet 现场总线进行通讯。
定义DSQC652板的总线连接相关参数说明见表1-1-1参数名称设定值说明Name d652设定IO板在系统中的名字Address10设定IO板在总线中的地址来自模板的值DSQC 652 24 VDC I/O Device选择DeviceNet设备单击【ABB菜单】【控制面板】【配置】【DeviceNet Device】【添加】显示图1-1-1所示的界面图1-1-1单击“使用来自模板的值”行的下拉菜单,选择“DSQC 652 24 VDC I/O Device”,如图1-1-2所示图1-1-2点击【向下】按钮,找到参数名称Address,将值改成10。
单击【确定】,完成DSQC652板的总线连接。
提示“重启”选择【是】。
如图1-1-3所示图1-1-32、创建数字输入信号DI1单击【ABB菜单】【控制面板】【配置】【Signal】【添加】显示图1-2-1所示的界面,数字输入信号DI1相关参数说明见表1-2-1表1-2-1参数名称设定值说明Name DI1设定数字输入信号的名字Type of Signal Digital Input设定信号的类型Assigned to Device DSQC 652 24 VDC I/O Device设定信号所在的IO模块Device Mapping1设定信号所占用的地址Invert Physical Value NO如果想将信号取反,可选Yes图1-2-1按照表1-2-1设定,设定完毕后如图1-2-2所示,单击【确定】,提示“重启”选择【是】,完成数字输入信号DI1的创建。
工业机器人3.3工业机器人标准IO板DSAC651的配置

组输入信号就是将几个数字输入信号组合起来使用,用于 接受外围设备输入的BCD编码的十进制数。 此例中,gi1占用地址1~4共4位,可以代表十进制数0-15 。如此类推,如果占用地址5位的话,可以代表十进制数0-31。
其操作如下:
3.3.5定义组输出信号GO1 组输出信号go1的相关参数
组输出信号go1的相关状态
DSQC651板的总线连接的相关参数说明
其总线连接操作步骤如下:
3.3.2定义数字输入信号DI1 数字输入信号DI1的相关参数
其操作如下:
3.3.3定义数字输出信号DO1 数字输出信号DO1的相关参数
操作步骤:
3.3.4定义组输入信号GI1 组输入信号GI1的相关参数
组输入信号GI1的状态
组输入信号就是将几个数字输入信号组合起来使用,用于 接受外围设备输入的BCD编码的十进制数。 此例中,gi1占用地址1~4共4位,可以代表十进制数0-15 。如此类推,如果占用地址5位的话,可以代表十进制数0-31。
其操作如下:
3.3.6定义模拟输出信号AO1模拟输出源自号AO1的相关参数其操作如下:
335定义组输出信号go1组输出信号go1的相关参数组输出信号go1的相关状态组输入信号就是将几个数字输入信号组合起来使用用于接受外围设备输入的bcd编码的十进制数
3.3 ABB标准I/O板DSQC651板的配置
ABB标准I/O板DSQC651是最为常用的模块,下面以 创建数字输入信号DI、数字输出信号DO、组输入信号GI、 组输出信号GO和模拟输出信号AO为例。 3.3.1定义DSQC651板的总线连接 ABB标准I/O板都是下挂在DeviceNet现场总线下的设备, 通过X5端口与DeviceNet现场总线进行通信。
工业机器人通信基础知识
图7-15信号类型选择
标准I/O板—DSQC651板的配置
( 5 )双击“ Type of Unit ”选择“ d651 ”,然后单击 “确定”。如图7-16。
图7-16指定信号所在板
标准I/O板—DSQC651板的配置
标准I/O板—DSSQC651板的离线配置 1、离线定义标准I/O板 (1)选择界面上的功能选项卡,单击“PAPID”,如图732所示。
图7-32离线定义标准I/O板
标准I/O板—DSSQC651板的离线配置 (3)在弹出的对话框中,按照以下的数值进行设置, 之后便点击确定便可设定信号参数。
图7-39离线定义数字输入信号
机器人I/O控制指令 (4)WaitDO数字输出信号判断指令 WaitDO数字输出信号判断指令用于判断数 字输出信号的值是否与目标一致。指令如 下: WaitDO do1,1;等待,直到输出信号do1 为1,方才跳到下一步骤。 具体参数说/O控制指令
(5)WaitTime时间等待 WaitTime为时间等待指令,即等待时间到 达你所设定的时间。指令如下: WaitTime 1;等待1s后执行下一动作。 (6):=赋值指令,即对程序数据进行赋值。 (7)Stop停止指令,即停止程序执行。
标准I/O板—DSQC651板的配置 ABB的标准IO板提供的常用信号处理 有数字输入DI、数字输出DO、模拟输入 AI、模拟输出AO以及输送链跟踪。本项 目以最常用的ABB标准IO板DSQC651为例 进行,进行详细的讲解如何进行相关的参 数设定。DSQC651板提供八个DI,如表71所示,八个DO, 如表7-1所示。这里主 要对数字量进行精讲,对模拟量和组信号 做基本的设置介绍所以端口不做介绍。
《工业机器人编程与操作》项目一 配置机器人参数

项目一 任务一 机器人系统配置
三、知识储备
(一)认识工业机器人
工业机器人是综合应用计算机、自动控制、自动 检测及精密机械装置等高新技术的产物,是技术密集 度及自动化程度很高的典型机电一体化加工设备。
根据 ISO 的定义,工业机器人是面向工业领域 的多关节机械手或多自由度的机器人。
工业机器人的典型应用包括搬运、焊接、刷漆 、组装、采集和放置、产品检测和测试等。 所有工 作的完成都具有高效性、持久性、速度性和准确性 。
个相互垂直
的轴线移动来实现,其工作空间为
。
5、IRB120是 ABB 新型第
代机器人家族的最新成员,也是迄今
ABB 制造的
(最大/最小)的机器人。
项目一 任务一 机器人系统配置
二、选择题
1、工业机器人的典型应用包括
。
A 搬运 B组装 C 产品检测
D 测试等
2、ABB 常用机器人有
。
A IRB120
广泛适用于电子、食品、饮料、制药 、医疗、研究等领域,主 要应用与物料搬 运、装配等。
项目一 任务一 机器人系统配置
(三)工业机器人的组成
(2)IRB140
是一款 6 轴多用途工业机器人,易与 各类工艺应用相集成与融合。
其设 计紧凑、牢靠,采用集成式线缆 包,进一步提高了整体柔性,可选配碰撞检 测功能(实现全路径 回退),以使可靠性和 安全性更有保障。
专为弧焊而设计,设有送丝机走线安 装孔,其可为机械臂搭载工艺设备提供便 利。
项目一 任务一 机器人系统配置
(三)工业机器人的组成
(4)IRB360
效载荷大、占地面积小等特点 。 对开放式食品工业,IRB360 另 外提供洁净室版和不锈钢可 冲洗版 以供选择。
工业机器人编程-DSQC651板的介绍

7
8
9
1
2
3
4
5
0V BLACK黑色
CAN信号线low BLUE蓝色
屏蔽线
24V RED红色
GND 地址选择公共端
模块ID,地址确定
CAN信号线high WHITE白色
1
2
4
8
16
32
2
8
10
谢 谢!
型号
说明
DSQC651
分布式I/O模块 di8/do8 ao2
DSQC652
分布式I/O模块 di16/do16
DSQC653
分布式I/O模块 di8/do8带继电器
DSQC355A
分布式I/O模块 ai4/ao4
DSQC377A
输送链跟踪单元
工业机器人工作站编程与调试
ABB标准I/O板DSQC651
2
3
4
5
6
1
X6:模拟输出接口
端子1~3未使用
0V
端子5/6地址:0~15/16~31
工业机器人工作站编程与调试
ABB标准I/O板DSQC651
X3:数字输入接口
2
3
4
5
端子10未使用
端子1~8地址:0~7
6
7
8
9
1
0V
工业机器人工作站编程与调试
ABB标准I/O板DSQC651
X5:DeviceNet接口
DSQC651
分布式I/O模块 di8/do8 ao2
X1:数字输出接口
X6:模拟输出接口
X5:DeviceNet接口
X3:数字输入接口
工业机器人工作站编程与调试
PLC应用与实践(三菱)配套教学延伸阅读:机器人标准IO板和输入输出信号的配置

PLC应用与实践(三菱)配套教学延伸阅读:机器人标准IO板和输入输出信号的配置机器人标准IO板和输入输出信号的配置1. 机器人标准IO板的配置在ABB机器人中CC-LINK总线、ProfibusDP总线及标准I/O板等都是下挂在DeviceNet 现场总线下的设备,通过X5端口与DeviceNet现场总线进行通信。
他们的配置方法非常类似,下面以DSQC653板的配置为例进行分析。
(1)参数配置定义DSQC653板的总线连接的相关参数说明见表1。
表1 DSQC653参数配置表(2)配置过程①单击“控制面板”中的“配置”选项。
如图1所示。
图1 控制面板菜单②单击“DeviceNet Device”后再单击“显示全部”。
如图2所示。
图2 选择DeviceNet总线③单击“添加”。
此时进入参数设置界面。
使用默认模板中的“DSQC 653 Relay I/O Device”。
如图3所示。
图3 选择板卡④双击“Name”进行DSQC653板在系统中名字的设定。
在系统中将DSQC653板的名字设定为“d653_10”(10代表此模块在DeviceNet总线中的地址,方便识别),然后单击“确定”。
如图4所示。
图4 修改板卡名称⑤将地址设定为10,然后单击“确定”。
如图5所示。
图5 修改板卡地址至此DSQC653板的配置完成。
需要注意的是,地址一定要根据硬件来填写。
IO板配置完成以后就可以进行输入输出信号的配置了。
2. 配置数字输入信号di1(1)参数配置数字输入信号di1的相关参数见表15-7。
表2 数字输入配置表(2)配置过程①和创建IO板过程前几步一样,进入到“配置”界面。
单击“Signal”,再单击“显示全部”。
如图6所示。
图6 添加信号②单击“添加”。
进入参数设置界面后,首先修改信号名称,改为“di1”。
在“Type of Signal”选项后的下拉列表中,选择信号类型为“Digital Input”,即数字输入。
工业机器人自动装配工作站配套设备功能

1.1工业机器人自动装配工作站配套设备功能本教材所举例自动装配机器人工作站为鼠标装配机器人工作站,所用的机器人需要具备快速、灵活、精度高等特点。
本工作站选择了2台ABB IRB120机器人,进行鼠标装配工作,还包括8只无线鼠标和自动装配工作台,如图错误!文档中没有指定样式的文字。
-1所示。
图错误!文档中没有指定样式的文字。
-1鼠标装配机器人工作站系统组成1.1.1ABB IRB120机器人ABB是全球领先的工业机器人供应商,它提供机器人产品、模块化制造单元及服务,在世界范围内安装了超过20万台机器人。
本工作站采用型号为ABB IRB120的六自由度工业机器人(以下简称IRB120机器人),与其配套的机器人控制柜型号为IRC5。
IRB120机器人是迄今最小的多用途机器人,已经获得IPA机构“ISO5级洁净室(100级)”的达标认证,能够在严苛的洁净室环境中充分发挥优势。
该机器人本体的安装角度不受任何限制;机身表面光洁,便于清洗;空气管线与用户信号线缆从底脚至手腕全部嵌入机身内部,易于机器人集成。
由于其出色的便携性与集成性,使IRB120机器人成为同类产品中的佼佼者。
ABB机器人由机械系统、控制系统和驱动系统三大重要部分组成。
其中,机械系统即为机器人本体,是机器人的支承基础和执行机构,包括基座、臂部、腕部;控制系统是机器人的大脑,是决定机器人功能和性能的主要因素,主要功能是根据作业指令程序以及从传感器反馈回来的信号,从而控制机器人在工作空间中的位置运动、姿态和轨迹规划、操作顺序及动作时间等;驱动系统是指驱动机械系统动作的驱动装置。
IRB120机器人本体和IRC5紧凑型控制柜如图错误!文档中没有指定样式的文字。
-2所示,其工作范围如图错误!文档中没有指定样式的文字。
-3所示。
IRB120机器人的参数见表1所示。
图错误!文档中没有指定样式的文字。
-2 ABB IRB120机器人和控制柜图错误!文档中没有指定样式的文字。
机器人IO板卡配置

其操作如下 :
定义数字量输出信号
1.单击左上角主菜单按钮。 2.选择“控制面板”。
定义数字量输出信号
3.选择“配置”
定义数字量输出信号
4.双击“Signal”。
定义数字量输出信号
5.单击“添加”。
定义数字量输出信号
6.双击“Name”。
定义数字量输出信号
7.输入”do1”,然后单击”确定”。
定义组输入信号
11.输入”1-4”,然后单击”确定”。
定义组输入信号
12.单击”确定”。
定义组输入信号
13.单击”是”,完成设定。
组输出信号go1的相 关参数及状态,见表
定义组输出信号
参数名称 Name
Type of Signal Assigned to Device Device Mapping
Type of Signal Digital Input 设定信号的类型
Assigned to Device board10 设定信号所在的 IO 模块
Device Mapping 0 设定信号所占用的地址
其操作如下 :
定义数字量输入信号
1.单击左上角主菜单按钮。 2.选择“控制面板”。
定义数字量输入信号
3.选择“配置”。
定义数字量输入信号
4.双击“Signal”。
定义数字量输入信号
5.单击“添加”。
定义数字量输入信号
6.双击“Name”
定义数字量输入信号
7.输入”di1”,然后单击”确定”。
定义数字量输入信号
8.双击”Type of Signal”,选择”Digital Input”。
定义数字量输入信号
说明 设定组输入信号的名字 设定信号的类型 设定信号所在的 IO 模块 设定信号所占用的地址
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
ABB标准I/O板DSQC651是最为常用的模块,下面以 创建数字输入信号DI、数字输出信号DO、组输入信号GI、 组输出信号GO和模拟输出信号AO为例。 3.3.1定义DSQC651板的总线连接 ABB标准I/O板都是下挂在DeviceNet现场总线下的设备, 通过X5端口与DeviceNet现场总线进行通信。
组输入信号就是将几个数字输入信号组合起来使用,用于 接受外围设备输入的BCD编码的十进制数。 此例中,gi1占用地址1~4共4位,可以代表十进制数0-15 。如此类推,如果占用地址5位的话,可以代表十进制数0-31。
其操作如下:
3.3.6定义模拟输出信号AO1
模拟输出信号AO1的相关参数
其操作如下:
DSQC651板的总线连接的相关参数说明
其总线连接操作步骤如下:
3.3.2定义数字输入信号DI1 数字输入信号DI1的相关参数
其操作如下:
3.3.3定义数字输出信号DO1 数字输出信号DO1组输入信号GI1 组输入信号GI1的相关参数
组输入信号GI1的状态
组输入信号就是将几个数字输入信号组合起来使用,用于 接受外围设备输入的BCD编码的十进制数。 此例中,gi1占用地址1~4共4位,可以代表十进制数0-15 。如此类推,如果占用地址5位的话,可以代表十进制数0-31。
其操作如下:
3.3.5定义组输出信号GO1 组输出信号go1的相关参数
组输出信号go1的相关状态