桥式直流PWM变换器仿真分析解析
桥式PWM逆变直流电动机控制

课程设计报告课程设计名称:桥式PWM逆变电动机控制仿真院系班级:机电工程学院机电一班姓名:吴增昊目录第一部分:课程设计介绍 (3)H桥式可逆PWM变换器的工作原理: (3)第二部分:电路设计 (4)第三部分:参数设置和调节器设计 (5)调节器参数计算: (5)电流调节器参数计算 (5)转速调节器参数计算 (6)最终的调节器计算结果如下 (7)第四部分:输出结果 (7)第五部分:结果分析 (10)第一部分:课程设计介绍可逆轧机,龙门刨床等生产机械要求运动控制系统能够快速的正、反转,以及提高产量及质量;开卷机,卷取机等虽然不要求正反转运行,却需要快速制动。
将上述生产工艺要求归纳成运动控制系统的性能,就是电动机转矩还需要产生制动转矩,实现生产机械快速的减速,停车与正,反向运行的功能。
H桥式可逆PWM变换器的工作原理:PWM控制的示意图如图1所示:可控开关S以一定的时间间隔重复地接通和断开,当S接通时,供电电源Us通过开关S施加到电动机两端,电源向电机提供能量,电动机储能:当开关S断开时,中断了供电电源Us向电动机电流继续流通。
图1:PWM控制示意图这样,电动机得到的电压平均值Uas为:Uas=ton·Us/T=aUs在系统主电路部分,采用的是大功率GTR为开关元件、H桥电路为功率放大电路所构成的电路结构,如图2所示。
图中,四只GTR分为两组,VT1和VT4为一组,VT2和VT3为另一组。
同一组中的两只GTR同时导通,同时关断,且两组晶体管之间可以是交替的导通和关断。
脉宽调制器的作用是:用脉冲宽度调制的方法,把恒定的直流电源电压调制成频率一定宽度可变的脉冲电压序列,从而平均输出电压的大小,以调节电机转速。
图2:H桥式可逆PWM变换器正向运行(如图a )所示:第1阶段,在0≤t ≤ton 期间,Ub1、Ub4为正,VT1、VT4导通,Ub2、Ub3为负,VT2、VT3截止,电流id 沿回路1流通,电动机M 两端电压UAB=+Us ;第2阶段,在ton ≤t ≤T 期间,Ub1、Ub4为负,VT1、VT4截止,VD2、VD3续流,并使VT2、VT3保持截止,电流id 沿回路2流通,电动机M 两端电压UAB=-Us;反向运行(如图b )所示:第1阶段,在0≤t ≤ton 期间,Ub2、Ub3为负,VT2、VT3截止,VD1、VD4续流,并使VT1、VT4截止,电流-id 沿回路4流通,电动机M 两端电压UAB=+Us;第2阶段,在ton ≤t ≤T 期间,Ub2、Ub3为正,VT2、VT3导通,Ub1、Ub4为负,使VT1、VT4保持截止,电流-id 沿回路3流通,电动机M 两端电压UAB=-Us 。
PWM整流器的仿真与分析毕业论文
本科毕业设计论文题目 PWM整流器仿真与分析毕业设计(论文)原创性声明和使用授权说明原创性声明本人重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。
尽我所知,除文中特别加以标注和致的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得及其它教育机构的学位或学历而使用过的材料。
对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了意。
作者签名:日期:指导教师签名:日期:使用授权说明本人完全了解大学关于收集、保存、使用毕业设计(论文)的规定,即:按照学校要求提交毕业设计(论文)的印刷本和电子版本;学校有权保存毕业设计(论文)的印刷本和电子版,并提供目录检索与阅览服务;学校可以采用影印、缩印、数字化或其它复制手段保存论文;在不以赢利为目的前提下,学校可以公布论文的部分或全部容。
作者签名:日期:学位论文原创性声明本人重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。
除了文中特别加以标注引用的容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。
对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。
本人完全意识到本声明的法律后果由本人承担。
作者签名:日期:年月日学位论文使用授权书本学位论文作者完全了解学校有关保留、使用学位论文的规定,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。
本人授权大学可以将本学位论文的全部或部分容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。
涉密论文按学校规定处理。
作者签名:日期:年月日导师签名:日期:年月日注意事项1.设计(论文)的容包括:1)封面(按教务处制定的标准封面格式制作)2)原创性声明3)中文摘要(300字左右)、关键词4)外文摘要、关键词5)目次页(附件不统一编入)6)论文主体部分:引言(或绪论)、正文、结论7)参考文献8)致9)附录(对论文支持必要时)2.论文字数要求:理工类设计(论文)正文字数不少于1万字(不包括图纸、程序清单等),文科类论文正文字数不少于1.2万字。
基于matlab的三相桥式PWM逆变电路的仿真实验报告
基于matlab 的三相桥式PWM 逆变电路的仿真实验报告一、小组成员指导教师二、实验目的1. 深入理解三相桥式 PWM 逆变电路的工作原理。
2. 使用 simulink 和 simpowersystem 工具箱搭建三相桥式 PWM 逆变电路的仿真框图.3. 观察在 PWM 控制方式下电路输出线电压和负载相电压的波形。
4. 分别改变三角波的频率和正弦波的幅值, 观察电路的频谱图并进行谐波分析。
三、实验平台Matlab / simulink / simpowersystem五、实验模块介绍BSi∏* WIVt正弦波, 电路常用到的正弦信号模 块,双击图标,在弹出的窗 口中调整相关参数。
其信号 生成方式有两种:Time based 和SamPle based .OKCancelHelPI,J3. E E 示波器,其模块可以接受多个输入信号,每个端口的输入信号都将在 一个坐标轴中显示。
2.锯齿波发RePeat ing j t able (mask)OIItPUt 炷 repeating SeQUeTlCe Of niunbers SPeCified Ln a IabIe Of I IJH 亡-ValiL 亡 pairs. VaItLeS □f tiinft ShOUIti be JilorL OtoniCalIy IrLCrea≤in⅛ ・生器,产生一个时基和高度 可调的锯齿波序列。
⅞⅛ SOUrCe BlCCk Parameter^r RePtating SeqUtnCeS-ErqU-⅞-π茜ParaJiieterETinIe ValUftEiFUnCtiOn BloCk P ⅛ramet 亡rm : RelatianaI OPeratOr 屋Relational OperatorAPPl ie≡ the selected re IatLOIlaI OlPerator to t h.E inpu Ieft ) input 79xreΞpQΓL^ j ζ□ the it st Qp ⅞Eand ・Main Si SnaI Attr ibu ,t e S Kelatianal OPeratclr :∖-∣ 。
基于MATLAB的三相桥式PWM逆变电路的状态空间分析与仿真
关键词:PWM;状态空间法;Simulink
Abstract
Thecontroltechnologyof the PWM inverter circuitis the most widely used ,the vast majorityof theinverter circuit applications noware PWM inverter circuit.In order to analyze the circuit of the PWM inverter,Firstlyestablished the required modelofPWM inverter circuit, and the working principle ofthe three-phase PWM inverter control circuit and the circuit is analyzedon the basis of the LC filter circuits and load R-L.Analysis of this circuit is to take the state space method,namely the establishment of the state space expression to get the working status of this circuit by analyzing the state space expression.
ifrob==n
disp('System is observable')
直流PWM调速系统MATLAB仿真

《单片机原理及接口技术》课程设计报告课题名称直流PWM调速系统的MATLAB仿真学院自动控制与机械工程学院专业机械设计制造及自动化班级姓名(学号)时间2016-1-9摘要直流电机具有良好的启动性能和调速特性,它的特点是启动转矩大,能在宽广的范围内平滑、经济地调速,转速控制容易,调速后效率很高。
本文设计的直流电机调速系统,主要由51单片机、电源、H桥驱动电路、LED液晶显示器、霍尔测速电路以及独立按键组成的电子产品。
电源采用78系列芯片实现+5V、+15V对电机的调速采用PWM波方式,PWM是脉冲宽度调制,通过51单片机改变占空比实现。
通过独立按键实现对电机的启停、调速、转向的人工控制,LED实现对测量数据(速度)的显示。
电机转速利用霍尔传感器检测输出方波,通过51单片机对1秒内的方波脉冲个数进行计数,计算出电机的速度,实现了直流电机的反馈控制。
关键词:直流电机调速;H桥驱动电路;LED显示器;51单片机ABSTRACTDC motor has a good startup performance and speed characteristics, it is characterized by starting torque, maximum torque, in a wide range of smooth, economical speed, speed, easy control, speed control after the high efficiency. This design of DC motor speed control system, mainly by the microcontroller 51, power supply, H-bridge driver circuits, LED liquid crystal display, the Hall velocity and independent key component circuits of electronic products. Power supply with 78 series chip +5 V, +15 V for motor speed control using PWM wave mode, PWM is a pulse width modulation, duty cycle by changing the MCU 51. Achieved through independent buttons start and stop the motor, speed control, turning the manual control, LED realize the measurement data (speed) of the display. Motor speed using Hall sensor output square wave, by 51 seconds to 1 microcontroller square wave pulses are counted to calculate the speed of the motor to achieve a DC motor feedback control.Keywords: DC motor speed control;H bridge driver circuit;LED display目录第1章引言1.1 概况现代工业的电力拖动一般都要求局部或全部的自动化,因此必然要与各种控制元件组成的自动控制系统联系起来,而电力拖动则可视为自动化电力拖动系统的简称。
移相全桥ZVS PWM DC/DC变换器的仿真分析
移相全桥ZVSPWMDC/DC变换器的仿真分析作者:龙泽彪施博文来源:《消费导刊·理论版》2008年第17期[摘要]本文首先在研究硬开关的缺陷上,提出软开关技术。
对移相控制ZVS PWM DC/DC 变换器的工作原理进行分析研究的基础上,使用PSpice9.2计算机仿真软件对变换器的主电路进行仿真和分析,验证该新型DC/DC变换器的拓扑结构设计的正确性和可行性。
[关键词]软开关 DC/DC ZVS 移相控制 PSpice9.2作者简介:龙泽彪(1985-),男,湖北仙桃人,贵州大学电气工程学院在读硕士研究生,研究方向:异步电机控制;施博文(1985-),男,贵州大学电气工程学院在读硕士研究生,研究方向:电力电子与电气传动。
一、引言随着新型电力电子器件以及适用于更高频率的电路拓扑和新型控制技术的不断出现,开关电源朝着小型化、高效化、低成本、低电磁干扰、高可靠性、模块化、智能化的方向发展。
硬开关DC/DC变换器在电流连续工作模式下会遇到严重的问题,这一般都与有源开关器件的体内寄生二极管有关,其关断过程中的反向恢复电流产生的电流尖峰对开关器件有极大的危害。
本文在对DC/DC变换器的基本工作原理进行分析、研究的基础上,对已经出现的软开关DC/DC变换器拓扑结构进行分析研究,提出的一种新型的DC/DC变换器的拓扑结构,并进行深入的研究。
二、移相控制ZVS PWM DC/DC全桥变换器的工作原理移相控制ZVS PWM DC/DC全桥变换器(Phase-Shifted zero-voltage-switching PWMDC/DC Full-Bridge Converter,PS ZVS PWM DC/DC FB Converter),是利用变压器的漏感或原边串联的电感和功率管的寄生电容或外接电容来实现开关管的零电压开关,其主电路拓扑结构及主要波形如图1所示。
其中,D1~D4分别是S1~S4的内部寄生二极管,C1~C4分别是S1~S4的寄生电容或外接电容,Lr是谐振电感,它包含了变压器的漏感。
课程设计:直流PWM-M可逆调速系统的设计与仿真
直流PWM-M可逆调速系统的设计与仿真摘要当今,自动化控制系统已经在各行各业得到了广泛的应用和发展,而直流调速控制作为电气传动的主流在现代化生产中起着主要作用。
本文主要研究直流调速系统,它主要由三部分组成,包括控制部分、功率部分、直流电动机。
长期以来,直流电动机因其具有调节转速比较灵活、方法简单、易于大范围内平滑调速、控制性能好等特点,一直在传动领域占有统治地位。
微机技术的快速发展,在控制领域得到广泛应用。
本文对基于微机控制的双闭环可逆直流PWM 调速系统进行了较深入的研究,从直流调速系统原理出发,逐步建立了双闭环直流PWM调速系统的数学模型,用微机硬件和软件发展的最新成果,探讨一个将微机和电力拖动控制相结合的新的控制方法,研究工作在对控制对象全面回顾的基础上,重点对控制部分展开研究,它包括对实现控制所需要的硬件和软件的探讨,控制策略和控制算法的探讨等内容。
在硬件方面充分利用微机外设接口丰富,运算速度快的特点,采取软件和硬件相结合的措施,实现对转速、电流双闭环调速系统的控制。
论文分析了系统工作原理和提高调速性能的方法,研究了IGBT模块应用中驱动、吸收、保护控制等关键技术.在微机控制方面,讨论了数字触发、数字测速、数字PWM调制器、双极式H型PWM变换电路、转速与电流控制器的原理,并给出了软、硬件实现方案。
关键词:PWM调速、直流电动机、双闭环调速目录前言 (1)第1章直流PWM-M调速系统 (2)第2章UPE环节的电路波形分析 (4)第3章电流调节器的设计 (6)3.1 电流环结构框图的化简 (6)3.2 电流调节器参数计算 (7)3.3 参数校验 (8)3.3.1 检查对电源电压的抗扰性能: (8)3.3.2 晶闸管整流装置传递函数的近似条件 (9)3.3.3 忽略反电动势变化对电流环动态影响的条件 (9)3.3.4 电流环小时间常数近似处理条件 (9)3.4 计算调节器电阻和电容 (9)第4章转速调节器的设计 (11)4.1 电流环的等效闭环传递函数 (11)4.2 转速环结构的化简和转速调节器结构的选择 (11)4.3 转速调节器的参数的计算 (14)4.4 参数校验 (14)4.4.1 电流环传递函数化简条件 (15)4.4.2 转速环小时间常数近似处理条件 (15)4.5 计算调节器电阻和电容 (15)4.6 调速范围静差率的计算 (16)第5章系统仿真 (17)5.1 仿真软件Simulink介绍 (17)5.2 Simulink仿真步骤 (17)5.3 双闭环仿真模型 (17)5.4 双闭环系统仿真波形图 (18)结论 (19)参考文献 (20)前言直流PWM_M调速系统几年来发展很快,直流PWM_M调速系统采用全控型电力电子器件,调制频率高,与晶闸管直流调速系统相比动态响应速度快,电动机转矩平稳脉动小,有很大的优越性,在小功率调速系统和伺服系统中的应用越来越广泛。
桥式直流PWM变流器的研究与仿真

桥 式 直 流 PW M 变 流 器 的 研 究 与 仿 真
姜 春 玲 朱振 广 ,
( . 山 学院 物 理 与 电子 科 学 系 ;. 山 学 院 国 资 处 , 东 泰 安 1泰 2泰 山 2 12 ) 70 1
[ 摘 要 】 讨 论 了桥 式 直 流 变 流 器 的 P WM 控 制 方 式 , 并在 M tb中利 用 s nik建立 了仿 真 模 型 在 不 同 aa l i dn H
1 引 言
将 直 流 电能转 换为另 一 固定 电压 或可调 电压 的直 流 电能 的 电路称 为 直 流变换 电路 它 利用 电力 开 关器 件周期 性 的导通与关 断来 改变输 出 电压 的大小 , 是开关 电源 的核心部 分 开 关器 件 的控 制 电路 现在
. .
普 遍采 用 P WM技术 , 的优 点是功 耗小 , 它 控制 方便 , 本文 主要研 究桥式 直流 P WM 变流器
2 3 受 限 单 极 式 调 制 .
在单 极式 调制基 础 上 , 电动机 正转 时 , 只有 V l T 工作 于 P WM 方式 , T 始 终处 于 导通 状 态 , v ’ V4 而 T 和V] T 都关 断 ; 电动机 反转 时 , 只有 V 2 作于 P T工 WM 方 式 , T 始 终处 于导 通状 态 , V I v 4 关 V] 而 T 和 T都
维普资讯
第 2 9卷第 6期 20 0 7年 1 月 1
泰 山 学 院 学 报 J UR AL O A S N U I R I Y O N F r I HA N VE S r
V0 . 9 NO . 12 6 No . 2 0 v o7
,
参 数 下 对 电路 进 行 了分 析 .
分析全桥ZVS-PWM变换器的分析与设计

上世纪60年代开始起步的DC/DC PWM功率变换技术出现了很大的发展。
后然经过发展,越来越多在各个领域当中应用。
但由于其通常采用调频稳压控制方式,使得软开关的范围受到限制,且其设计复杂,不利于输出滤波器的优化设计。
本文选择了全桥移相控制ZVS-PWM谐振电路拓扑,在分析了电路原理和各工作模态的基础上,设计了输出功率为200W的DC/DC变换器。
1 电路原理和各工作模态分析1.1 电路原理图1所示为移相控制全桥ZVS—PWM谐振变换器电路拓扑。
Vin为输入直流电压。
Si(i=1.2.3,4)为第i个参数相同的功率MOS开关管。
为了防止桥臂直通短路,S1和S3,S2和S4之间人为地加入了死区时间△t,它是根据开通延时和关断不延时原则来设置同一桥臂死区时间。
S1和S4,S2和S3之间的驱动信号存在移相角α,通过调节α角的大小,可调节输出电压的大小,实现稳压控制。
Lf和Cf构成倒L型低通滤波电路。
图2为全桥零电压开关PWM变换器在一个开关周期内4个主开关管的驱动信号、两桥臂中点电压VAB、变压器副边电压V0以及变压器原边下面对电路各工作模态进行分析,分析时时假设:(1)所有功率开关管均为理想,忽视正向压降电压和开关时时间;(2)4个开关管的输出结电容相等,即Ci=Cs,i=1,2,3,4,Cs为常数;(3)忽略变压器绕组及线路中的寄生电阻;(4)滤波电感足够大。
1.2 各工作模态分析(1)原边电流正半周功率输出过程。
在t0之前,Sl和S4已导通,在(t0一t1)内维持S1和S4导通,S2和S3截止。
电容C2和C3被输入电源充电。
变压器原边电压为Vin,功率由变压器原边传送到负载。
在功率输出过程中,软开关移相控制全桥电路的工作状态和普通PWM硬开关电路相同。
(2)(t1一t1′):超前臂在死区时间内的谐振过程。
加到S1上的驱动脉冲变为低电平,S1由导通变为截止。
电容C1和C3迅速分别充放电,与等效电感(Lr+n2Lf)串联谐振,在谐振结束前(t2之前),使前臂中心电压快速降低到一0.7V,使D3立即导通,为S3的零电压导通作好准备。
PWM逆变器Matlab仿真

摘要在本设计中,首先,针对课设题目要求,进行了系统的总体方案选择,以及各功能模块的方案论证和选择。
选择通过升压斩波电路将输入直流电压升高,再利用全桥逆变方式将直流电转换成50HZ的交流电,控制部分采用PWM斩波控制技术。
接着,对各功能模块进行了详细的原理分析和电路设计,同时也对可能出现的直流不平衡等问题进行了考虑。
并最终通过MATLAB来实现PWM逆变器的仿真,并进行结果分析,得出系统参数对输出的影响规律。
经过理论分析设计以及MATLAB仿真两种方式,证明了本系统可以很好地实现将输入110V直流转换成220V、50HZ单相交流电的设计要求,另外本设计也按设计要求采用了PWM斩波控制技术。
关键词:逆变;PWM控制;MATLAB仿真;DC-DC;目录1.设计方案的论证与选择 (1)1.1总体设计思路 (1)1.2 DC-DC方案论证与选择 (1)1.3逆变主电路的方案论证与选择 (2)1.4 逆变器控制方法的论证与选择 (3)2.设计原理及实现方法 (4)2.1 升压斩波电路的设计 (4)2.2 全桥式逆变电路的设计 (5)2.3 PWM控制技术及SPWM波的生成 (6)2.3.1 PWM控制的基本原理 (7)2.3.2 SPWM法的基本原理 (8)2.3.3 规则采样法 (8)2.3.4单极性和双极性PWM控制逆变电路分析 (9)3.MATLAB仿真及结论分析 (12)3.1升压环节的建模与仿真 (12)3.2 制作并生成SPWM波形 (13)3.3 逆变环节的建模与仿真(一) (15)3.4 逆变环节的建模与仿真(二) (17)3.4.1载波频率与输出电压频率改变对波形的影响 (18)3.4.2 改变负载对输出的影响 (21)4.收获与体会 (25)5.参考文献 (26)PWM逆变器Matlab仿真1.设计方案的论证与选择1.1总体设计思路由于要求的输出为220V,50HZ单相交流电,而输入却是只有110V的直流电压,所以仅仅由逆变环节不能实现,而应该有升压环节。
桥式可逆PWM变换器的仿真
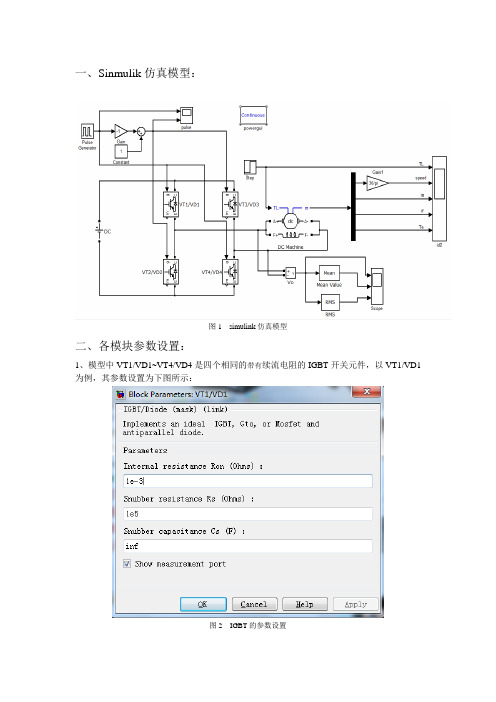
一、Sinmulik仿真模型:图1 simulink仿真模型二、各模块参数设置:1、模型中VT1/VD1~VT4/VD4是四个相同的带有续流电阻的IGBT开关元件,以VT1/VD1为例,其参数设置为下图所示:图2 IGBT的参数设置2、此仿真过程为一台直流并励电动机的启动过程。
电动机参数为U N=220V,n N=3000r/min,其他参数见以下电机模型参数设置,如图所示:图3 电机模型参数设置3、直流电源参数设置为如下图所示:图4 电源参数设置4、本模型中的四个IGBT用两个脉冲产生器触发产生脉冲,产生的两个脉冲互补,分别用来触发VT1、VT4和VT2、VT3;通过设置脉冲的占空比可以调制输出电压,图5是占空比为50%,幅值为1的脉冲。
图6是两个互补脉冲的波形。
图5 脉冲参数设置图6 互补脉冲产生的波形5、本次仿真中,负载转矩采用阶跃给定输入,图7是负载转矩为10N.m时的设置图7 负载转矩输入设置6、仿真参数设置如图8所示:图8 仿真参数设置7、谐波分析用powergui模块,分析时将示波器需要分析量的数据格式取为structure with time,这样的保存的数据可以用powergui模块分析,点击powergui模块,选择其中的FFT Analysis 功能,如图9所示:图9 powergui模块界面三、仿真结果:(一)占空比为90%时对系统的分析;1、在此种情况下,脉冲参数设置为图10所示,电机两端的输入电压及其平均值和有效值波形如图11所示,从上往下依次为电压瞬时值,电压平均值和电压有效值:图10 脉冲参数设置图11 电机两端的电压及其平均值和有效值波形2、电动机带不同负载时的仿真结果:①电动机所带负载为轻载时的情况如图12所示;②电动机所带负载为适当负载时的情况如图13所示;图13 电动机所带负载为适合负载时的波形③电动机所带负载为重载时的情况如图14所示;(二)占空比为50%时对系统的分析;1、在此种情况下,脉冲参数设置为图15所示,电机两端的输入电压及其平均值和有效值波形如图16所示,从上往下依次为电压瞬时值,电压平均值和电压有效值:图15 脉冲参数设置图16电机两端的电压及其平均值和有效值波形2、电动机所带负载为不同情况下的仿真结果:①电动机所带负载为轻载时的情况如图17所示;图17 电动机所带负载为轻载时的波形②电动机所带负载为适当负载时的情况如图18所示;图18 电动机所带负载为适合载时的波形③电动机所带负载为重载时的情况如图19所示;图19 电动机所带负载为重载时的波形(三)占空比为10%时对系统的分析;1、在此种情况下,脉冲参数设置为图20所示,电机两端的输入电压及其平均值和有效值波形如图21所示,从上往下依次为电压瞬时值,电压平均值和电压有效值:图20 脉冲参数设置图21电机两端的电压及其平均值和有效值波形2、电动机所带负载为不同情况下的仿真结果:①电动机所带负载为轻载时的情况如图22所示;图22 电动机所带负载为轻载时的波形②电动机所带负载为适当负载时的情况如图23所示;图23 电动机所带负载为适合负载时的波形③电动机所带负载为重载时的情况如图24所示:图24 电动机所带负载为重载时的波形四、结论分析:占空比相同时,电枢电流,励磁电流和电磁转矩波形基本相同,对于转速,重载情况下,随着负载的增加,转速会逐渐减小,甚至出现反转。
直流电机PWM调速系统的设计与仿真
直流电机PWM调速系统的设计与仿真一、引言直流电机是电力传动中最常用的一种电动机,具有调速范围广、响应快、结构简单等优点。
而PWM(脉宽调制)技术是一种有效的电机调速方法,可以通过改变占空比控制电机的转速。
本文将介绍直流电机PWM调速系统的设计与仿真,包括建模分析、控制策略、电路设计和仿真实验等内容。
二、建模分析1.直流电机的模型直流电机的数学模型包括电动势方程和电机转矩方程。
电动势方程描述电机的输出电动势与供电电压之间的关系,转矩方程描述电机的输出转矩与电机转速之间的关系。
2.PWM调速系统的控制策略PWM调速系统的控制策略主要包括PID控制和模糊控制两种方法。
PID控制是一种经典的控制方法,通过比较实际输出与期望输出,计算出控制量来调整系统。
模糊控制则是一种基于模糊逻辑的控制方法,通过模糊推理,将输入量映射为输出量。
三、电路设计1.电机驱动电路设计电机驱动电路主要由电流传感器、逆变器和滤波器组成。
电流传感器用于测量电机的电流,逆变器将直流电压转换为交流电压,滤波器用于消除电压中的高频噪声。
2.控制电路设计控制电路主要由控制器、比较器和PWM信号发生器组成。
控制器接收电机转速的反馈信号,并与期望转速进行比较,计算出控制量。
比较器将控制量与三角波进行比较,生成PWM信号。
PWM信号发生器将PWM信号转换为对应的脉宽调制信号。
四、仿真实验1.系统建模与参数设置根据直流电机的模型,建立MATLAB/Simulink仿真模型,并根据实际参数设置电机的转矩常数、转矩常数、电机阻抗等参数。
2.控制策略实现使用PID控制和模糊控制两种方法实现PWM调速系统的控制策略。
通过调节控制参数,比较不同控制方法在系统响应速度和稳定性上的差异。
3.仿真实验结果分析通过仿真实验,分析系统的静态误差、动态响应和稳定性等性能指标。
比较不同控制方法的优缺点,选择合适的控制方法。
五、结论本文介绍了直流电机PWM调速系统的设计与仿真,包括建模分析、控制策略、电路设计和仿真实验等内容。
多相全桥ZVZCS PWM变换器的仿真研究

Ub ) () 2 r / c( = + C
() 5
③开 关模 态2£,f —— 在VD3 之 后开 通 [ 2 l 】 导通
VT, ,VT 是零 电压 开通 。VT, 与VT。 动 信号 的 驱 死 区时 间 应 满足 :t o。在 此期 间 ,VD 和VT  ̄ >t 4 导 通 ,A、B 点 电压 U 两 ,本 文介绍 一种 Z C 移 相全 桥P VZ S WM 变 换
C 从零 开始 线性 上升 ,C 的 电压 从 i 始 线性 下 , 开
器 ,它 可 以实现 超 前桥 臂 的零 电压 开 关 和滞 后 桥
臂 的零 电流开 关 ,是 一种 混 合 Z 和ZC 的软 开 VS S
r a o a l n i c n e trc n r d c wi h l s . e s n b ea d t s o v re a u es t s h e c o Ke wo d : h s - h f d F l Brd e C n e t Ze o-o t g r ・ u r n wi h n ; i erx S mu a i n y r s P a e s i e u l i g o v r; r - l eZe o- r e t - t v a c S t i g S m ti i lt c o
:
.
; b
、 /
/
’
/
..
图 1 移 相 全桥 Z Z SP M VC W 变换 器主 电路
图2 移相 全桥 2 ZSP M变换 器 的主 要 波 形 V C W
技术研究 ・ 开关与逆变
变成 上 正 下 负 。变压 器 副 边 两个 整 流 二极 管 VD
U =U Uc w2 i+ b 。 Uv2 U b T =一 c。 () 9 (0 1)
桥式变换器的仿真
目录摘要1 设计原理 (1)1.1 开关电源 (1)1.2半桥逆变器 (1)1.2.1半桥逆变器的概述 (1)1.2.2 半桥变换器的电路结构及作用 (2)1.2.3 半桥变换器的工作原理 (3)1.3 全桥变换器 (3)1.3.1全桥变换器的概述 (3)1.3.2 全桥变换器的结构及作用 (4)1.3.3 全桥变换器的工作原理 (5)2 仿真电路的设计 (6)2.1 半桥变换器仿真电路 (6)2.2 全桥变换器的仿真电路图 (8)3 仿真结果及分析 (10)4 小结 (13)参考文献 (14)桥式变换器的仿真1 设计原理1.1 开关电源开关稳压电源的种类很多,有BUCK变换器、BOOST变换器、BUCK/BOOST变换器、正激变换器、反激变换器、推挽式变换器、半桥变换器、全桥变换器等,本次设计研究的是半桥和全桥变换器。
对开关电压的研究十分有意义,这是由于该开关电源有很多优越性:1、效率高。
开关电源的调整开关管工作在开关状态,截止期间,开关管无电流,因此不消耗功率,可大大提高效率,通常课达到80%~90%左右。
而传统的调整串联型稳压电源的晶体管一直工作在放大区,全部负载电流都通过晶体管,功耗就较大,因而效率很低,一般只在50%左右。
2、功耗小。
由于开关管在开关状态,功耗小,不需要采用打散热器。
而且功耗校使得机温升低,周围环境不会长期工作在高温环境下而损坏,有利于提高整机的可靠性和稳定性。
3、稳定围宽。
当开关电源输入电压在150~250V围变化时,都能达到很好的稳压效果,输出电压的变化在2%以下。
而且在输入电压发生变化时,始终能保持稳压电路的高效率。
因此开关稳压电源适用于电网电压波动很大的地区。
4、安全可靠。
开关稳压电路一般具有自动保护电路,当稳压电路、高压电路、负载出现故障或短路时,能自动切断电源,保护功能灵敏可靠。
1.2半桥逆变器1.2.1半桥逆变器的概述半桥逆变器实际上是由两个单端正激变换器组合而成的。
桥式可逆pwm变换器电路分析

桥式可逆pwm变换器电路分析
桥式可逆pwm变换器电路分析
可逆PWM变换器主电路有多种形式,最常用的是桥式(亦称H型)电路
双极式控制可逆PEM变换器的4个驱动电压波形
它们之间的关系是: Ug1≠Ug4=_Ug2=-Ug3。
在个开关周期内,当0≤tston 时, Uab= Us,电枢电流id沿回路1流通:当ton≤tT时,驱动电压反机,id 沿回路2经二极管续流, Uab=-Us。
因此,Uab在一个周期内具有正负机间的脉冲波形,这是双极式名称的由来。
图3- -6 也绘出了双极式控制时的输出电压和电流波形。
1g相当于“般负载
的情况,脉动电流的方向始终为正: 1a相当于轻载情况,电流可在正负方向之。
桥式可逆PWM变换器Matlab仿真综述

作业:桥式可逆PWM变换器的主电路由四个IGBT组成一个H桥,并且每一个IGBT上均反并联有电力二极管,电力二极管起到续流的作用采用以下2种方式进行仿真,并进行比较分析:●Simulink的SimPowerSystems●OrCAD PSpice要求在文件组中画出详细的原理图、给出元件的详细模型和参数、仿真设置参数和仿真结果并进行分析。
讨论分类情况如下:(一)占空比为90%时对系统的分析;(二)占空比为50%时对系统的分析;(三)占空比为10%时对系统的分析;在上面所分的三大类中,每一种又分为三小类。
从而对该系统的分析尽量达到全面。
三小类为:①电动机所带负载为轻载时的情况;②电动机所带负载为适当负载时的情况;③电动机所带负载为重载时的情况;1、Simulink的SimPowerSystems(1)原理图如下图所示(2)元器件参数设置脉冲发生器:逻辑算符:IGBT:直流电机参数:直流电机的励磁电压110V,励磁电流0.5A,额定转速2400r/min,负载转矩1.15N·m。
(一)、占空比为90%时对系统的分析;电动机所带负载为轻载时的情况;1、电机的输出电压波形图:2、电机的转速、电枢电流、励磁电流、转矩的波形图:电动机所带负载为适当负载时的情况;1、电机的输出电压波形图:2、电机的转速、电枢电流、励磁电流、转矩的波形图:1、电机的输出电压波形图:2、电机的转速、电枢电流、励磁电流、转矩的波形图:从以上波形图可以看出,当占空比为90%时,电机的输出电压在不同负载的情况下不受影响。
而转速在不同的负载下是变化的,轻载时转速略高于额定转速;适当负载时为额定转速;重载时低于额定转速。
电机启动时会产生较大的电枢电流,当转速趋于平稳的时候电枢电流趋近于零。
转矩的变化跟电枢电流近似。
(二)占空比为50%时对系统的分析;1、电机的输出电压波形图:2、电机的转速、电枢电流、励磁电流、转矩的波形图:电动机所带负载为适当负载时的情况;2、电机的转速、电枢电流、励磁电流、转矩的波形图:电动机所带负载为重载时的情况;2、电机的转速、电枢电流、励磁电流、转矩的波形图:从以上波形图可以看出,当占空比为50%时,电机的输出电压在不同负载的情况下不受影响。
PWM整流器的Matlab仿真探讨

层央行科技管理模式老化、科技服务跟不上业务发展 的问题,建立以科技人员和部门计算机安全员为核心 的“科技服务小组”基层央行科技工作管理机制,实现 全员参与、齐抓共管的大科技格局,为基层央行各项业 务提供安全、高效的科技保障。同时,在地市中支建立 区域性技术支持队伍和信息技术人才库,加强技术合 作和交流,实现科技人力资源的高度共享。
97 2010 年第5 期
FINANCIAL COMPUTER OF HUANAN
四、结束语 综上所述,自抗扰控制技术主要的优点表现在:控
制器的设计不依赖于系统的模型,且结构简单容易实 现;算法简单,无须大量的矩阵运算;控制系统的参数 可以在比较大的范围内选取,即鲁棒性好。
自抗扰控制器可以解决一类不确定性对象的控制 问题,并具有很强的适应性和鲁棒性。它的一项核心技 术就是将系统模型的不确定性和外部扰动视为一个综 合扰动项,然后利用扩展状态观测器对综合扰动项进 行观测和前馈补偿,实现系统的线性化。
4. 建立科技人员流动的长效机制。建议央行建立 科技人员能进能出的长效机制,保持科技队伍的鲜活 性,通过老科技人员到业务部门交流来提升业务部门 的科技水平;适当提高基层行科技人员的待遇,保证科
技人才的知识价值与劳动价值得到体现,并妥善解决 科技人员兼职问题,稳定科技队伍。
(三)加强基层央行计算机信息保密管理,严把科 技工作安全管理关
+
1 L
vq
此时,两相同步旋转坐标系(d,q)中的 q 轴分量表
示成有功分量,而 d 轴分量表示成无功分量。并且有:
2
e=Udc
upd =Udc sd
upq =Udc sq
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
黑龙江大学课程设计说明书
学院:机电工程学院
专业:电气工程及其自动化
课程名称:电力电子技术
设计题目:桥式直流PWM变换器仿真
姓名:
学号:
指导教师:
成绩:
目录
第一章课程设计的性质和目的 (2)
第二章课程设计的内容 (2)
第三章设计报告要求 (2)
第四章参考资料 (2)
第五章课程设计的题目 (3)
第六章课程设计的内容 (3)
6.1总体电路的功能框图及其说明 (3)
6.2单相桥式PWM逆变电路 (3)
6.3控制电路 (4)
6.4驱动电路 (5)
6.5缓冲电路 (6)
6.6双极性PWM控制方式 (6)
6.7单极性PWM控制方式 (9)
第七章心得与体会 (11)
第八章参考文献 (13)
附录:评分标准 (14)
一、课程设计的性质和目的
性质:是电气自动化专业的必修实践性环节。
目的:
1、培养学生文献检索的能力,特别是如何利用Internet检索需要的文献资料。
2、培养学生综合分析问题、发现问题和解决问题的能力。
3、培养学生运用知识的能力和工程设计的能力。
4、培养学生运用仿真工具的能力和方法。
5、提高学生课程设计报告撰写水平。
6、加深理解《电力电子技术》课程的基本理论;
7、初步掌握电力电子电路的设计方法。
二、课程设计的内容:
1、整流电路的选择
2、整流变压器额定参数的计算
3、晶闸管(全控型器件)电压、电流额定的选择
4、平波电抗器电感值的计算
5、保护电路(缓冲电路)的设计
6、触发电路(驱动电路)的设计
7、画出完整的主电路原理图和控制电路原理图
8、用MATLAB进行仿真,观察结果
三、设计报告要求
依据“课程设计说明书”(电子文档)的模板格式撰写。
内容应包括:
1、主电路设计说明
2、控制电路设计说明
3、仿真结果讨论(说明是否达到设计指标的要求)
4、附录:主电路和控制电路原理图
四、参考资料
电力电子技术教材及相关资料
五、课程设计的题目:
11、桥式直流PWM变换器的仿真
电源电压12V,RL负载,R=0.5欧,L=0.5mH,f=3KHz,占空比从0.8切换到-0.8,观察输出电压、电流波形。
(要求:双极式控制和单极式控制波形)
六、课程设计的内容:
6.1总体电路的功能框图及其说明
控制电路产生PWM控制信号,控制电路产生的控制信号传到驱动电路,驱动电路把控制信号转换为加在MOSFET控制端和公共端之间,可以使其开通或关断的信号。
通过控制MOSFET的开通和关断来控制主电路,即单相全桥电路工作。
保护电路是用来保护电路的,防止电路产生过电流、过电压和欠电压等现象损害电路设备。
6.2单相桥式PWM逆变电路
PWM逆变电路可以分为电压型和电流型两种,目前实际应用的都是电压型,因此本届阿虎要分析电压型逆变电路的控制方法。
要得到需要的PWM波形有两种方法,分别是计算法和调制法。
根据正弦波频率、幅值和半周期脉冲数,准确计算,据此控制逆变电路开关器件的通断,就可得到所需波形。
与计算法相对应的是调制法,即把希望调制的波形作为调制信号,把接收调制的信号作为载波信号,通过信号波的调制得到所期望的波形。
通常采用等腰三角波作为载波,在调制信号波为正弦波时,所得到的就是PWM 波形。
单相桥式PWM逆变电路6.3 控制电路
6.4 驱动电路
说明:驱动电路,是电力电子主电路与控制电路之间的接口,良好的驱动电路使电力电子器件工作在较理想的开关状态,缩短开关时间,减小开关损耗,对装置的运行效率、可靠性和安全性都有重要的意义。
IGBT 驱动电路说明:在无缓冲电路的情况下,绝缘栅双极晶体管v 开通时电流迅
速上升,dt di /很大,关断时dt du /很大,并出现很高的过电压。
在有缓冲电路的
情况下,
v 开通时,缓冲电容s c 先通过S
R 向v 放电,使电流c i 先上一个台阶,
以后因为有dt di /抑制电路的i L ,c i 的上升速度减慢。
i R 、i
VD 是
v 关断时
为i L 中的磁场能量提供放电回路而设置的。
在
v 关断时,负载电流通过s
VD 向s c 分流,减轻了
v 的负担,抑制了dt du /和过电压。
6.5 缓冲电路(保护电路)
6.6双极性PWM控制方式(单相桥逆变)
在u r和u c的交点时刻控制IGBT的通断在u r的半个周期内,三角波载波有正有负,所得PWM波也有正有负,其幅值只有±U d两种电平。
同样在调制信号u r和载波信号u c的交点时刻控制器件的通断。
u
正负半周,对各开关器件的控制规律相同:
r
当u r >u c时,给V1和V4导通信号,给V2和V3关断信号;
如i o>0,V1和V4通,如i o<0,VD1和VD4通, u o=U d ;
当u r<u c时,给V2和V3导通信号,给V1和V4关断信号;
如i o<0,V2和V3通,如i o>0,VD2和VD3通,u o=-U d 。
双极性PWM控制方式波形
给出双极性下桥式直流PWM变换器SIMULINK的建模仿真图:
给出双极性下桥式直流PWM变换器SIMULINK仿真的波形图:
6.7单极性PWM控制方式(单相桥逆变)在u r和u c的交点时刻控制IGBT的通断:
u r 正半周,V
1
保持通,V
2
保持断;
当u r>u c时使V4通,V3断,u o=U d ;
当u r<u c时使V4断,V3通,u o=0。
单极性PWM控制方式波形
给出单极性下桥式直流PWM变换器SIMULINK的建模仿真图:
给出单极性下桥式直流PWM变换器SIMULINK仿真的波形图:
七、心得与体会
通过此次课程设计,使我更加扎实的掌握了有关模拟电子技术方面的知识,在设计过程中虽然遇到了一些问题,但经过一次又一次的思考,一遍又一遍的检查终于找出了原因所在,也暴露出了前期我在这方面的知识欠缺和经验不足。
实践出真知,通过亲自动手操作,使我们掌握的知识不再是纸上谈兵。
过而能改,善莫大焉。
在课程设计过程中,我们不断发现错误,不断改正,不断领悟,不断获取。
最终的检测调试环节,本身就是在践行“过而能改,善莫大焉”的知行观。
这次课程设计终于顺利完成了,在设计中遇到了很多问题,最后在老师的指导下,终于游逆而解。
在今后社会的发展和学习实践过程中,一定要不懈努力,不能遇到问题就想到要退缩,一定要不厌其烦的发现问题所在,然后一一进行解决,只有这样,才能成功的做成想做的事,才能在今后的道路上劈荆斩棘,而不是知难而退,那样永远不可
能收获成功,收获喜悦,也永远不可能得到社会及他人对你的认可!
课程设计诚然是一门专业课,给我很多专业知识以及专业技能上的提升,同时又是一门讲道课,一门辩思课,给了我很多思考,给了我莫大的空间。
同时,设计让我感触很深。
使我对抽象的理论有了具体的认识。
此次设计也让我明白了思路即出路,有什么不懂不明白的地方要及时请教,做课程设计要有严谨的思路和熟练的动手能力,我感觉自己做了这次设计后,明白了总的设计方法及思路,通过这次尝试让我有了更加光火的思路,对今后的学习也有莫大的好处。
八、参考文献
[1] 《电力电子技术.机械工业出版社》. 王兆安.第五版
[2] 《现代电力电子技术及其应用》.东南大学出版社,王维平.
[3] 《电力电子技术计算机仿真实验》.北京:电子工业出版社.李传琦.
[4] 《电力电子技术与MATLAB仿真》.北京:中国电力出版社.周渊深.
《电力电子技术》课程设计评分标准《电力电子技术》课程设计的成绩由下列项目构成:
评定项目评定参考标准及分值
考评
成绩
设计任务完成情况
设计过程中的学习态度端正、设计认真,遵守纪律,保证出勤
(10分) 设计方案的正确性、合理性以及创新精神 (10分) 运用计算机仿真软件的熟练程度及仿真结果正确 (10分)
设计说明书内容完整、叙述正确、设计中遇到的问题能独立查找文献资料
(10分) 原理图正确、格式规范 (10分) 具有设计计算 (10分)
答辩掌握设计内容和设计方法 (10分) 回答问题有理论依据,基本概念清楚,回答准确思路清晰(20分) 具有较强的分析解决问题的能力 (10分)
总分 (100分)
指导教师:
年月日。