山东大学网络教育自动控制原理-专期末考试试题及参考答案
期末考试试题集-自动控制原理(含完整答案)

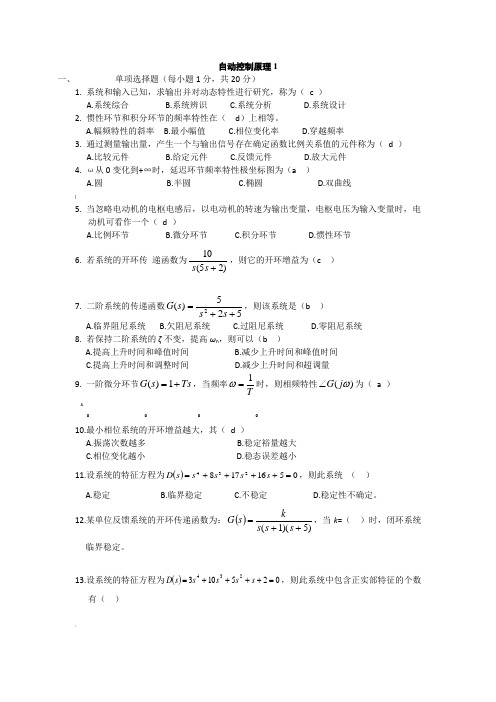
期末考试-复习重点自动控制原理1一、单项选择题(每小题1分,共20分)1. 系统和输入已知,求输出并对动态特性进行研究,称为( )A.系统综合B.系统辨识C.系统分析D.系统设计2. 惯性环节和积分环节的频率特性在( )上相等。
A.幅频特性的斜率B.最小幅值C.相位变化率D.穿越频率3. 通过测量输出量,产生一个与输出信号存在确定函数比例关系值的元件称为( )A.比较元件B.给定元件C.反馈元件D.放大元件4. ω从0变化到+∞时,延迟环节频率特性极坐标图为( )A.圆B.半圆C.椭圆D.双曲线5. 当忽略电动机的电枢电感后,以电动机的转速为输出变量,电枢电压为输入变量时,电动机可看作一个( )A.比例环节B.微分环节C.积分环节D.惯性环节6. 若系统的开环传 递函数为2)(5 10+s s ,则它的开环增益为( ) A.1 B.2 C.5 D.10 7. 二阶系统的传递函数52 5)(2++=s s s G ,则该系统是( ) A.临界阻尼系统 B.欠阻尼系统 C.过阻尼系统 D.零阻尼系统8. 若保持二阶系统的ζ不变,提高ωn ,则可以( )A.提高上升时间和峰值时间B.减少上升时间和峰值时间C.提高上升时间和调整时间D.减少上升时间和超调量9. 一阶微分环节Ts s G +=1)(,当频率T1=ω时,则相频特性)(ωj G ∠为( ) A.45° B.-45° C.90° D.-90°10.最小相位系统的开环增益越大,其( )A.振荡次数越多B.稳定裕量越大C.相位变化越小D.稳态误差越小11.设系统的特征方程为()0516178234=++++=s s s s s D ,则此系统 ( )A.稳定B.临界稳定C.不稳定D.稳定性不确定。
12.某单位反馈系统的开环传递函数为:())5)(1(++=s s s k s G ,当k =( )时,闭环系统临界稳定。
自控期末考试试题及答案

自控期末考试试题及答案一、选择题(每题2分,共20分)1. 自动控制系统中,开环系统是指:A. 系统有反馈回路B. 系统没有反馈回路C. 系统有前馈回路D. 系统有控制回路2. 系统稳定性分析中,根轨迹法的基本原理是:A. 系统根随参数变化的轨迹B. 系统根随时间变化的轨迹C. 参数随系统根变化的轨迹D. 时间随参数变化的轨迹3. PID控制器中,P代表:A. 比例B. 积分C. 微分D. 比例-积分4. 以下哪个不是控制系统的性能指标:A. 稳态误差B. 响应速度C. 稳定性D. 系统成本5. 状态空间法中,状态变量的选取原则是:A. 系统输入B. 系统输出C. 系统内部变量D. 系统外部变量6. 在控制系统中,超调量是指:A. 系统达到稳态时的误差B. 系统响应过程中的最大偏差C. 系统响应时间D. 系统稳态误差7. 闭环控制系统的传递函数是:A. G(s)H(s)B. G(s)/[1+G(s)H(s)]C. 1/[1+G(s)H(s)]D. G(s)*[1+H(s)]8. 控制系统的频率响应分析中,奈奎斯特判据的主要用途是:A. 确定系统稳定性B. 确定系统性能C. 确定系统响应速度D. 确定系统超调量9. 以下哪个不是控制系统的类型:A. 线性系统B. 非线性系统C. 离散系统D. 随机系统10. 系统设计中,最小相位系统是指:A. 系统相位随频率增加而增加B. 系统相位随频率增加而减少C. 系统相位为零D. 系统相位为常数二、简答题(每题10分,共30分)1. 解释什么是系统的时间响应,并列举至少三种常见的时间响应类型。
2. 描述PID控制器的设计过程,并解释各部分的作用。
3. 阐述状态空间法与传递函数法在控制系统分析中的不同应用。
三、计算题(每题25分,共50分)1. 给定一个二阶系统,其传递函数为:G(s) = (2s + 1) / (s^2 +3s + 2)。
计算该系统的单位阶跃响应,并画出其响应曲线。
期末考试试题集自动控制原理含完整答案(供参考)
期末考试-复习重点自动控制原理1一、单项选择题(每小题1分,共20分)1. 系统和输入已知,求输出并对动态特性进行研究,称为( )A.系统综合B.系统辨识C.系统分析D.系统设计2. 惯性环节和积分环节的频率特性在( )上相等。
A.幅频特性的斜率B.最小幅值C.相位变化率D.穿越频率3. 通过测量输出量,产生一个与输出信号存在确定函数比例关系值的元件称为( )A.比较元件B.给定元件C.反馈元件D.放大元件4. ω从0变化到+∞时,延迟环节频率特性极坐标图为( )A.圆B.半圆C.椭圆D.双曲线5. 当忽略电动机的电枢电感后,以电动机的转速为输出变量,电枢电压为输入变量时,电动机可看作一个( )A.比例环节B.微分环节C.积分环节D.惯性环节6. 若系统的开环传 递函数为2)(5 10+s s ,则它的开环增益为( ) A.1 B.2 C.5 D.107. 二阶系统的传递函数52 5)(2++=s s s G ,则该系统是( ) A.临界阻尼系统 B.欠阻尼系统 C.过阻尼系统 D.零阻尼系统8. 若保持二阶系统的ζ不变,提高ωn ,则可以( )A.提高上升时间和峰值时间B.减少上升时间和峰值时间C.提高上升时间和调整时间D.减少上升时间和超调量9. 一阶微分环节Ts s G +=1)(,当频率T1=ω时,则相频特性)(ωj G ∠为( ) A.45° B.-45° C.90° D.-90°10.最小相位系统的开环增益越大,其( )A.振荡次数越多B.稳定裕量越大C.相位变化越小D.稳态误差越小11.设系统的特征方程为()0516178234=++++=s s s s s D ,则此系统 ( )A.稳定B.临界稳定C.不稳定D.稳定性不确定。
12.某单位反馈系统的开环传递函数为:())5)(1(++=s s s k s G ,当k =( )时,闭环系统临界稳定。
山东大学网络教育期末考试试题及答案-现代控制理论3
现代控制理论-3
一、回答下列问题
1.连续系统离散化的主要原则是什么?
2.线性变换有哪几条基本性质,这些性质的内容是什么?
3.状态反馈是否改变原系统的能控性、能观测性。
二、问答
1.已知离散系统的状态空间表达式为:
(2)求系统的脉冲传递函数G (z)。
2.已知系统的状态空间表达式为
[]x
y u x b a x 111101-=⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡=&
(1)确定使系统状态完全能控的a 和b 应满足的条件;
(2)确定使系统状态完全能观的a 和b 应满足的条件。
3.已知系统的状态空间表达式为
[]03001210x x u y x
⎡⎤⎡⎤=+⎢⎥⎢⎥-⎣⎦⎣⎦=&
试利用状态反馈设计一个闭环系统,使希望的闭环极点为-2,-3。
自动控制原理期末考试卷与答案

自动控制原理期末考试卷与答案一、填空题(每空 1 分,共20分)1、对自动控制系统的基本要求可以概括为三个方面,即: 稳定性 、快速性和 准确性 。
2、控制系统的 输出拉氏变换与输入拉氏变换在零初始条件下的比值 称为传递函数。
3、在经典控制理论中,可采用 劳斯判据(或:时域分析法)、根轨迹法或奈奎斯特判据(或:频域分析法) 等方法判断线性控制系统稳定性。
4、控制系统的数学模型,取决于系统 结构 和 参数, 与外作用及初始条件无关。
5、线性系统的对数幅频特性,纵坐标取值为20lg ()A ω(或:()L ω),横坐标为lg ω. 6、奈奎斯特稳定判据中,Z = P — R ,其中P 是指 开环传函中具有正实部的极点的个数,Z 是指 闭环传函中具有正实部的极点的个数,R 指 奈氏曲线逆时针方向包围 (-1, j0 )整圈数。
7、在二阶系统的单位阶跃响应图中,定义为 调整时间 。
%σ是超调量 。
8、设系统的开环传递函数为12(1)(1)Ks T s T s ++,则其开环幅频特性为2212()()1()1KA T T ωωωω=+⋅+,相频特性为01112()90()()tg T tg T ϕωωω--=---。
9、反馈控制又称偏差控制,其控制作用是通过给定值 与反馈量的差值进行的。
10、若某系统的单位脉冲响应为0.20.5()105t t g t e e --=+,则该系统的传递函数G(s )为1050.20.5s s s s+++。
11、自动控制系统有两种基本控制方式,当控制装置与受控对象之间只有顺向作用而无反向联系时,称为 开环控制系统;当控制装置与受控对象之间不但有顺向作用而且还有反向联系时,称为 闭环控制系统;含有测速发电机的电动机速度控制系统,属于 闭环控制系统。
12、根轨迹起始于开环极点,终止于开环零点。
13、稳定是对控制系统最基本的要求,若一个控制系统的响应曲线为衰减振荡,则该系统 稳定。
山东大学网络教育期末考试试题及答案-自动控制原理B

三、名词解释(1).自动控制(2).系统误差(3).频率响应四、计算题(1).求图1中电网络的传递函数,iu为输入,u为输出。
图1(1).解:电网络中输出部分的阻抗为:21)('Z RCss+=总阻抗为:CsCsRCsRsRs11)('Z)(Z111+=+=+=传递函数为:111/1)(Z)('Z)(G11+=+==CsRCsCsRCssss(2).设某单位负反馈系统的开环传递函数为11)(+=s s G k ,当输入信号)30sin()(0+=t t r 作用于闭环系统的输入端时,试求系统的稳态输出。
解:系统的闭环传递函数为:21)(1)()(+=+=s s G s G s G k B 所以频率特性为:21)(+=ωωj j G B 幅频特性 41)(2+=ωωj G B51)(1==ωωj G B 相频特性5.0arctan 2arctan)(-=-=∠ωωj G B系统的稳态输出为:()5.0arctan 30sin 51-+οt (3).求图2的传递函数()()()C s G s R s =。
图2解:2431324321543211)()(H G G H G G G G G G G G G G G s R s C +++=(4).控制系统的开环传递函数为)12)(1(1)(k ++=s s s G ,求该系统的开环幅频特性和开环相频特性。
解:频率特性为:)12)(1(1)(k ++=ωωωj j j G开环幅频特性为:1541)(24++=ωωωA开环相频特性为:2213)(ωωωϕ--=arctg。
山大继续教育自动控制原理期末考试答案

词汇第一章自动控制 ( Automatic Control) :是指在没有人直接参与的条件下,利用控制装置使被控对象的某些物理量(或状态)自动地按照预定的规律去运行。
自动控制系统:将被控对象和控制装置(控制器)按照一定的方式连接起来构成的有机总体。
开环控制 ( open loop control ):开环控制是最简单的一种控制方式。
它的特点是,按照控制信息传递的路径,控制量与被控制量之间只有前向通路而没有反馈通路。
也就是说,控制作用的传递路径不是闭合的,故称为开环。
闭环控制 ( closed loop control) :凡是将系统的输出量反送至输入端,对系统的控制作用产生直接的影响,都称为闭环控制系统或反馈控制 Feedback Control 系统。
这种自成循环的控制作用,使信息的传递路径形成了一个闭合的环路,故称为闭环。
复合控制 ( compound control ):是开、闭环控制相结合的一种控制方式。
被控对象:指需要给以控制的机器、设备或生产过程。
被控对象是控制系统的主体,例如火箭、锅炉、机器人、电冰箱等。
控制装置则指对被控对象起控制作用的设备总体,有测量变换部件、放大部件和执行装置。
被控量 (controlled variable ) :指被控对象中要求保持给定值、要按给定规律变化的物理量。
被控量又称输出量、输出信号。
给定值 (set value ) :是作用于自动控制系统的输入端并作为控制依据的物理量。
给定值又称输入信号、输入指令、参考输入。
干扰 (disturbance) :除给定值之外,凡能引起被控量变化的因素,都是干扰。
干扰又称扰动。
第二章数学模型 (mathematical model) :是描述系统内部物理量(或变量)之间动态关系的数学表达式。
传递函数 ( transfer function) :线性定常系统在零初始条件下,输出量的拉氏变换与输入量的拉氏变换之比,称为传递函数。
山东大学网络教育期末考试试题及答案-网络控制技术 1

答:这种控制方式对任何工作站都没有预约发送时间。工作站的发送是随机的,必须在网络上争用传输介质,故称之争用技术。若同一时刻有多个工作站向传输线路发送信息,则这些信息会在传输线上互相混淆遭破坏,称为“冲突”,为尽量避免由于竞争引起的冲突,每个工作站在发送信息之前,都要监听传输线上是否有信息发送,这就是“载波监听”。载波监听CSMA的控制方式是先听再讲。一个站要发送,首先需监听总线,以决定介质上是否存在其他站的发送信号。如果介质是空闲的,则发送。如果介质是忙的,则等待一定间隔后重试。当监听总线状态后,可采用以下三种CSMA坚持退避算法:
山东大学网络控制技术
一、基本概念
1、什么是现场总线?
2、数据编码分几种?什么是曼彻斯特编码?
3、计算机局域网拓扑结构最常见的有哪几种?
答:计算机局域网拓扑结构主要有:星型拓扑结构、环形拓扑结构、总线型拓扑结构和树形拓扑结构。
4、什么是网络传输介质?
答:传输介质是网络中连接收发双方的物理通路,也是通信中实际传送信息的载体。网络中常用的传输介质有电话线、同轴电缆、双绞线、光导纤维、无线与通信卫星通信。
0BF06H
;总线定时寄存器0
BTR1
EQU
0BF07H
;总线定时寄存器1
OCR
EQU
0BF08H
;输出控制寄存器
CDR
EQU
0BF1FH
;时钟分频寄存器
RXB
EQU
0BF14H
;接收缓冲器
TXB
EQU
0BF0AH
;发送缓冲器
入口条件:将本节点号存入NODE单元。
波特率控制字存入NBTR0和NBTR1单元。
期末考试试题集-自动控制原理(含完整答案)

1 ,则该环节是( 5s 1
A. 比例环节
B. 积分环节
C. 惯性环节
D. 放大元件 )
D. 微分环节
6. 已知系统的微分方程为 3 x 0 t 6 x0 t 2 x 0 t 2 xi t ,则系统的传递函数是(
)
2 A.
3s2 6 s 2 2
C. 2 s2 6 s 3
1 B.
3s 2 6s 2 1
)
K
A.
Ts 1
sd
B.
s(s a)(s b)
K
C.
s( s a)
K D. s2 (s a)
15.
单位反馈系统开环传递函数为
Gs
4 s2 (s2 3s
,当输入为单位斜坡时,其加速度误差 2)
为( )
A.0
B.0.25
C.4
D.
16. 若已知某串联校正装置的传递函数为 A. 相位超前校正 B. 相位滞后校正
就可以判断其稳定性。
26. 一般讲系统的位置误差指输入是
所引起的输出位置上的误差。
27. 超前校正是由于正相移的作用,使截止频率附近的
明显上升,从而具有较大
的稳定裕度。
28. 二阶系统当共轭复数极点位于
线上时,对应的阻尼比为 0.707 。
29.PID 调节中的“P”指的是
控制器。
30. 若要求系统的快速性好,则闭环极点应距虚轴越
一个( )
A. 比例环节
B. 微分环节
C. 积分环节
D. 惯性环节
10
6. 若系统的开环传 递函数为
,则它的开环增益为( )
s(5s 2)
A.1
B.2
C.5
D.10
自动控制原理期末考试试卷六套+(答案详解)
自动控制原理1一、 单项选择题(每小题1分,共20分)1. 系统和输入已知,求输出并对动态特性进行研究,称为( c )C.系统分析2. 惯性环节和积分环节的频率特性在( d )上相等。
D.穿越频率3. 通过测量输出量,产生一个与输出信号存在确定函数比例关系值的元件称为( d )D.放大元件4. ω从0变化到+∞时,延迟环节频率特性极坐标图为(a )A.圆5. 当忽略电动机的电枢电感后,以电动机的转速为输出变量,电枢电压为输入变量时,电动机可看作一个( d )D.惯性环节6. 若系统的开环传 递函数为2)(5 10+s s ,则它的开环增益为(c ) C.57. 二阶系统的传递函数52 5)(2++=s s s G ,则该系统是(b ) B.欠阻尼系统8. 若保持二阶系统的ζ不变,提高ωn ,则可以(b )B.减少上升时间和峰值时间9. 一阶微分环节Ts s G +=1)(,当频率T1=ω时,则相频特性)(ωj G ∠为( a ) A.45°10.最小相位系统的开环增益越大,其( d )D.稳态误差越小11.设系统的特征方程为()0516178234=++++=s s s s s D ,则此系统 ( )A.稳定12.某单位反馈系统的开环传递函数为:())5)(1(++=s s s k s G ,当k =( )时,闭环系统临界稳定。
C.3013.设系统的特征方程为()025103234=++++=s s s s s D ,则此系统中包含正实部特征的个数有( )C.214.单位反馈系统开环传递函数为()ss s s G ++=652,当输入为单位阶跃时,则其位置误差为( )D.0.0515.若已知某串联校正装置的传递函数为1101)(++=s s s G c ,则它是一种( ) D.相位滞后校正16.稳态误差e ss 与误差信号E (s )的函数关系为( )B.)(lim 0s sE e s ss →=17.在对控制系统稳态精度无明确要求时,为提高系统的稳定性,最方便的是( )A.减小增益18.相位超前校正装置的奈氏曲线为( )B.上半圆19.开环传递函数为G (s )H (s )=)3(3+s s K ,则实轴上的根轨迹为( ) C.(-∞,-3)20.在直流电动机调速系统中,霍尔传感器是用作( )反馈的传感器。
山东大学网络教育期末考试试题及答案-自动控制原理A

三、名词解释(1).稳定性(2).频率响应(3).传递函数四、计算题(1).求图1中电网络的传递函数,i u 为输入,0u 为输出。
图1(1).解:电网络中输出部分的阻抗为:21)('Z R Cs s += 总阻抗为:Cs Cs R Cs R s R s 11)('Z )(Z 111+=+=+=传递函数为:111/1)(Z )('Z )(G 11+=+==Cs R Cs Cs R Cs s s s(2).设某单位负反馈系统的开环传递函数为110)(+=s s G k ,当输入信号)30sin()(0+=t t r 作用于闭环系统的输入端时,试求系统的稳态输出。
(2).解:系统的闭环传递函数为:1110)1101/(110)(+=+++=s s s s G所以频率特性为:11/2211101110)(ωωωωjarctg e j j G -+=+=系统的稳态输出为:)8.24(12210)11/103(12210)11/03(21110)(o 002+=-+=-++=t Sin arctg t Sin arctg t Sin t y ωω学年 学期山东大学 自动控制原理 课程试卷 A 卷(3).求图2的传递函数()()()C s G s R s =。
图2 (3)解:闭合回路有两个:122212 ;1H G L H G G L -=-= (2分)前向通路有两个,前向通路的余子式都为1。
32212 ;1G G P G G P -==所以传递函数为:2211232211)(H G G H G G G G G s G +++=(4).控制系统的开环传递函数为)12)(1(1)(k ++=s s s G ,求该系统的开环幅频特性和开环相频特性。
(4)解: 频率特性为:)12)(1(1)(k ++=ωωωj j j G 开环幅频特性为:1541)(24++=ωωωA开环相频特性为:2213)(ωωωϕ--=arctg学年 学期山东大学 自动控制原理(非自动化类) 课程试卷 A 卷。
自动控制原理期末试题及答案
参考答案及评分标准一、单项选择题(每小题1分,共20分)1. 系统和输入已知,求输出并对动态特性进行研究,称为( C )A.系统综合B.系统辨识C.系统分析D.系统设计 2. 惯性环节和积分环节的频率特性在( A )上相等。
A.幅频特性的斜率B.最小幅值C.相位变化率D.穿越频率3. 通过测量输出量,产生一个与输出信号存在确定函数比例关系值的元件称为( C ) A.比较元件 B.给定元件 C.反馈元件 D.放大元件4. ω从0变化到+∞时,延迟环节频率特性极坐标图为( A )A.圆B.半圆C.椭圆D.双曲线5. 当忽略电动机的电枢电感后,以电动机的转速为输出变量,电枢电压为输入变量时,电动机可看作一个( B )A.比例环节B.微分环节C.积分环节D.惯性环节 6. 若系统的开环传 递函数为2)(5 10+s s ,则它的开环增益为( C )A.1B.2C.5D.10 7. 二阶系统的传递函数52 5)(2++=s s s G ,则该系统是( B )A.临界阻尼系统B.欠阻尼系统C.过阻尼系统D.零阻尼系统 8. 若保持二阶系统的ζ不变,提高ωn ,则可以( B )A.提高上升时间和峰值时间B.减少上升时间和峰值时间C.提高上升时间和调整时间D.减少上升时间和超调量 9. 一阶微分环节Ts s G +=1)(,当频率T1=ω时,则相频特性)(ωj G ∠为( A ) A.45° B.-45° C.90° D.-90° 10.最小相位系统的开环增益越大,其( D )A.振荡次数越多B.稳定裕量越大C.相位变化越小D.稳态误差越小11.设系统的特征方程为()0516178234=++++=s s s s s D ,则此系统 ( A ) A.稳定 B.临界稳定 C.不稳定 D.稳定性不确定。
12.某单位反馈系统的开环传递函数为:())5)(1(++=s s s ks G ,当k =( C )时,闭环系统临界稳定。
《自动控制原理》期末考试复习题及参考答案
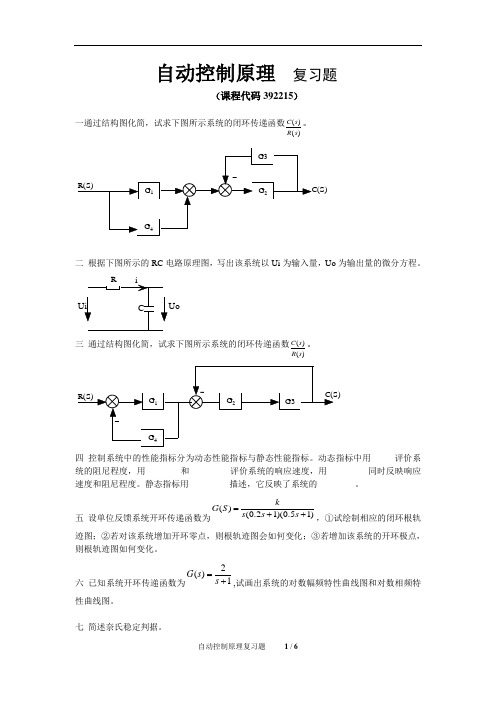
自动控制原理 复习题(课程代码392215)一通过结构图化简,试求下图所示系统的闭环传递函数()()C s R s 。
二 根据下图所示的RC 电路原理图,写出该系统以Ui 为输入量,Uo 为输出量的微分方程。
三 通过结构图化简,试求下图所示系统的闭环传递函数()()C s R s 。
四 控制系统中的性能指标分为动态性能指标与静态性能指标。
动态指标中用--------评价系统的阻尼程度,用------------和--------------评价系统的响应速度,用--------------同时反映响应速度和阻尼程度。
静态指标用--------------描述,它反映了系统的-------------。
五 设单位反馈系统开环传递函数为()(0.21)(0.51)kG S s s s =++,①试绘制相应的闭环根轨迹图;②若对该系统增加开环零点,则根轨迹图会如何变化;③若增加该系统的开环极点,则根轨迹图如何变化。
六 已知系统开环传递函数为2()1G s s =+,试画出系统的对数幅频特性曲线图和对数相频特性曲线图。
七 简述奈氏稳定判据。
八自动控制系统从控制的基本方式看可分为哪三种控制?并分别介绍每种控制。
九已知一单位反馈系统的开环传递函数为25()(6)G ss s=+,试计算其动态性能指标(σ%,t p ,t r和t s)。
十已知系统的闭环特征方程s4+2s3+3s2+4s+5=0,试用劳斯判据分析系统的稳定性。
若系统不稳定,指出不稳定根的个数。
十一简述线性系统的两个重要特性,并利用该特性计算下图所示输出量的拉氏表达式。
(已知R(S)=1/S,N(S)=1/S2)。
十二已知开环传递函数为10()(4)G SS S=+,若输入信号为r(t)=4+6t+3t2,求稳态误差。
十三简述控制系统稳态误差的含义,并给出其常有的两种定义方法。
十四试举出在控制系统中,常用的典型输入信号有哪几种。
十五简述系统的幅频特性、相频特性和频率特性的含义。
自动控制原理期末试卷与答案
32.反馈元件
33.最大超调量
34.频率响应
35.幅值裕量
四、简答题(每小题5分,共25分)
36.开环控制系统和闭环控制系统的主要特点是什么
)
37.如何用实验方法求取系统的频率特性函数
38.伯德图中幅频特性曲线的首段和传递函数的型次有何关系
39.根轨迹与虚轴的交点有什么作用 举例说明。
28.在扰动作用点与偏差信号之间加上能使静态误差降为0。
29.超前校正主要是用于改善稳定性和。
30.一般讲系统的加速度误差指输入是所引起的输出位置上的误差。
31.自动控制
32.传递函数
33.瞬态响应
34.最小相位传递函数
【
35.复现频率
36. 方块图变换要遵守什么原则,举例说明。
}
D.
15.系统的传递函数 ,其系统的增益和型次为 ( )
,2 4,2 ,4 4,4
16.若已知某串联校正装置的传递函数为 ,则它是一种( )
A.相位滞后校正B.相位超前校正C.相位滞后—超前校正D.反馈校正
17.进行串联超前校正前的穿越频率 与校正后的穿越频率 的关系,通常是( )
A. = B. > C. < D. 与 无关
:
14.单位反馈系统开环传递函数为 ,当输入为单位阶跃时,则其位置误差为( )
若已知某串联校正装置的传递函数为 ,则它是一种( )
A.反馈校正B.相位超前校正
C.相位滞后—超前校正D.相位滞后校正
16.稳态误差ess与误差信号E(s)的函数关系为( )
A. B.
C. D.
17.在对控制系统稳态精度无明确要求时,为提高系统的稳定性,最方便的是( )
(完整版)自动控制原理期末考试复习题及答案

一、 填空题1、线性定常连续控制系统按其输入量的变化规律特性可分为_恒值控制_系统、随动系统和_程序控制_系统。
2、传递函数为 [12(s+10)] / {(s+2)[(s/3)+1](s+30)} 的系统的零点为_-10_, 极点为_-2__, 增益为_____2_______。
3、构成方框图的四种基本符号是: 信号线、比较点、传递环节的方框和引出点 。
4、我们将 一对靠得很近的闭环零、极点 称为偶极子。
5、自动控制系统的基本控制方式有反馈控制方式、_开环控制方式和_复合控制方式_。
6、已知一系统单位脉冲响应为t e t g 5.16)(-=,则该系统的传递函数为。
7、自动控制系统包含_被控对象_和自动控制装置两大部分。
8、线性系统数学模型的其中五种形式是微分方程、传递函数、__差分方程_、脉冲传递函数_、__方框图和信号流图_。
9、_相角条件_是确定平面上根轨迹的充分必要条件,而用_幅值条件__确定根轨迹上各点的根轨迹增益k*的值。
当n-m ≥_2_时, 开环n 个极点之和等于闭环n 个极点之和。
10、已知一系统单位脉冲响应为te t g 25.13)(-=,则系统的传递函数为__。
11、当∞→ω时比例微分环节的相位是: A.90 A.90 B.90- C. 45 D.45-12、对自动控制的性能要求可归纳为_稳定性__、_快速性_和准确性三个方面, 在阶跃响应性能指标中,调节时间体现的是这三个方面中的_快速性___,而稳态误差体现的是_稳定性和准确性_。
13、当且仅当离散特征方程的全部特征根均分布在Z 平面上的_单位圆 _内,即所有特征根的模均小于___1____,相应的线性定常离散系统才是稳定的。
14、下列系统中属于开环控制系统的是 D.普通数控加工系统A.电炉箱恒温控制系统B.雷达跟踪系统C.水位控制系统D.普通数控加工系统15、某单位负反馈系统在单位阶跃信号作用下的系统稳态误差0=ss e ,则: B.意味着该系统的输出信号的稳态值为1 A.意味着该系统是一个0型系统 B.意味着该系统的输出信号的稳态值为1 C.意味着该系统没有输出信号 D.意味着该系统具有比较高的开环增益16、一阶系统11)(+=Ts s G 在单位斜坡信号作用下,系统的稳态误差为 T 。
山东大学自动控制原理试题及答案

路漫漫其修远兮,吾将上下而求索 - 百度文库1山东大学 课程试卷 学年 学期题号 一 二 三 四 五 六 七 八 九 十 总分 得分一.(15分)求下图所示结构图或信号流图的数学模型。
1、用结构图简化的方法求下图所示系统的传递函数Y (s )/R (s )。
2、求下图所示离散系统的脉冲传递函数C (z )/R (z )。
得分 阅卷人3、求下图所示信号流图的传递函数C (s )/R (s )。
二.二、(15分)已知系统的模拟电路图如下图所示。
其中:R 1=100K Ω,R 2=50K Ω,R 3=100K Ω,R 4 =100K Ω,R 5 =200K Ω,C 1=1μF ,C 2=10μF ,1、 画出系统的结构图;2、 求出系统的参数ζ,ωn ;3、 根据参数画出单位阶跃响应曲线的大体形状,并计算当r (t )=1+2t 时的稳态误差e ss 。
得分 阅卷人……………………………密……………………封……………………线……………………………控制科学与工程学院 专业 级 学号 姓名1第1页2第1页 共 页得分 阅卷人三.(15分)已知一负反馈系统开环传递函数为 )2()1()(-+=s s s k s G(1) 画出闭环系统的根轨迹图(写出必要的步骤); (2) 画出系统的开环极坐标图,并分析系统稳定时k 的取值范围。
得分阅卷人四.(20分)已知最小相位系统的对数幅频特性曲线如图示 1) 求系统的开环传递函数;2) 此时系统的相角裕度γ =?;3) 若要使系统的相角裕度γ =30︒,则要使系统开环增益为多少?控制科学与工程 学院 专业 级 学号 姓名……………………………密……………………封……………………线…………………………山东大学 课程试卷 学年 学期4得分阅卷人五.(15分)已知系统的开环传递函数为)11.0(40)(+=sssG要求:保持稳态误差不变,且校正后系统的相角裕度γ'≥ 45︒。
山东大学网络教育期末考试试题及答案-热工自动控制系统 A_2

- 1 -山东大学继续(网络)教育一、单选题1.阻尼系数时表明该系统的阶跃响应为()过程。
A.衰减振荡 B.等幅振荡 C.非振荡D.以上都不是2.对某一阶系统,若要保证该系统稳定,则取值范围为()。
A. B. C. D.3.关于过热蒸汽温度控制系统的主参数与副参数,下列描述正确地是()。
A.主参数是减温器出口温度,副参数是过热器出口温度B.主参数是过热器出口温度,副参数是减温器出口温度C.主参数是负荷,副参数是燃料量D.主参数是负荷,副参数是送风量4.关于串级过热蒸汽温度控制系统中主、副调节器描述错误的是()。
A.主调节器是细调,负责消除过热蒸汽温度偏差B.副调节器是粗调,负责克服系统的内外扰C.副调节器控制主参数过热器出口温度,主调节器控制副参数减温器出口温度D.主调节器动作慢,副调节器动作快5.方框图等效变换中下列描述错误的是()。
A.变换原则为单向不可逆,信息不变性B.相邻的相加点可以互换位置C.相加点和引出点相邻时可以互换位置D.相邻的引出点可以互换位置6.关于大型机组汽包锅炉给水全程控制系统的描述正确的是()。
A.始终采用单冲量给水控制系统B.始终采用串级三冲量控制系统C.由单冲量控制系统过渡到三冲量控制系统D.以上都不对7.热工自动控制系统的控制器(调节器)基于()输出信号控制调节结构。
A.偏差信号B.被调量C.控制量D.扰动8.劳斯稳定判据要求,由特征方程系数组成的劳斯阵第一列为()。
A.正B.负C.可以正可以负D.以上都不对9.某典型环节的传递函数是,则该环节是()。
A.比例环节B.积分环节C.惯性环节D.实际微分环节10.对某单回路调节系统,分别采用P 调节器与PI 调节器控制,当被控对象不变化时,若P 调节器的比例带与PI 调节器的比例带相等,相比P 控制时,PI 控制下系统的如下特征参数将如何变化:动态偏差()。
A.增加B.减小C.可能增加可能减小D.以上都不对11.工程法整定调节器参数中属于开环试验方法的是()。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
要求:保持稳态误差不变,且校正后系统的相角裕度
1)画出原系统的Bode图
2)确定串联超前校正装置的传递函数;(要有必要的步骤,不用校验)
解:1)c= 20= 26.6
2) Gc(s) = 1+0.084s/ 1+0.03s
4、已知控制系统如图3所示,求:
(1)当K= 0时,确定系统的阻尼系数不无阻尼振荡频率a,和单位斜坡输入信号作用时系统的稳态误差eu。
自动控制原理
一、计算题(135分)
1、试用结构图简化方法求图2所示系统的传递函数Y(S)/R(S)。
解:Y(s)/R(s) =G3+G1G2/[ 1 +G2G5+G1G4]
2、已知最小相位系统的对数幅频特性曲线如图4示。
1)求系统的开环传递函数;
2)此时系统的相角裕度?=?,
3)画出相应的对数相频特性曲线。
(2)当z= 0.707时,试确定系统中的K值和单位斜坡输入时系统的稳态误差。
5、已知负反馈系统的开环传递函数为
要求:保持稳态误差不变,且校正后系统 26.6
2) Gc(s) = 1+1.24s/ 1+6.1s
7、解:
8解: