基于宏程序功能FANUC 0i—MC系统用户指令开发
FANUC 0I数控车床的宏程序编制
FANUC 0I数控车床的宏程序编制摘要:用户宏程序是提高数控车床性能的一种特殊功能,它是使用变量来代替程序中的功能代码或地址值面编制的加工程序。
这些变量可同因数一样进行逻辑运算,因而可以使复杂的程序大大简化。
关键词:宏程序、宏指令、非圆二次曲线、变量Macro Programming of CNC Lathe with FANUC oi SystemAbetract: User macro programs are special functions to improve the performance of CNC lathe which replaces the functional codes or addresses with variables. These variables can do logical operations like the factors so that they can simplify the complex programs effectively. Keywords:macro program,macroinstruction,non-circular quadratic curves,variable0、引言随着我国机械行业的飞速发展,数控加工技术在机械制造业中得到了越来越广泛的运用,很多企业都引进了数控机床设备。
用户在使用数控机床设备加工工件时,只需按照各种数控编程指令的格式编程即可。
通用的数控系统在处理插补和伺服时都是采用边插补边控制伺服的方式。
由于非圆曲线形状较为复杂,在插补时需要处理的数据量大,同时响应速度的要求较高,因此,一般的数控系统只有直线插补和圆弧插补两种插补功能,并不具备其它曲线的插补功能。
在传统的CNC编程时有时这些指令满足不了用户的要求,入加工椭圆、抛物线、双曲线等,这时就可使用用户宏程序功能,用户可以根据需要自己扩展数控系统的功能。
FANUCOi-M系统的编程与操作

第4 章
FANUC0i-M系统的编程与操作
12.返回参考点校验指令 G27 编程格式: G27 X_ Y_ Z_; 13.自动返回参考点指令 G28 编程格式: G28 X_ Y_ Z_; 编程举例: N010 G90 X100. Y200. Z300.; N020 G28 X400. Y500.; 中间点是(400.0,500.0) N030 G28 Z600.; 中间点是(400.0,500.0,600.0) 14.自动从参考点返回指令 G29 编程格式: G29 X_ Y_ Z_;
第4 章
FANUC0i-M系统的编程与操作
5.坐标平面选择指令 G17、G18、G19 6.绝对坐标与增量坐标指令 G90、G91 7.尺寸单位选择指令 G20、G21 8.快速点定位指令 G00 编程格式: G00 X_ Y_ Z_; 例4-1 如图4-2所示,使用G00指令编 程,要求刀具从A点快速定位到B点。
第4 章
4.2.2
FANUC0i-M系统的编程与操作
辅助功能M指令
辅助功能又称为M功能,由地址M和两位数字组成。 在一个程序段中只应规定一个M 指令,当在一个程序 段中出现了两个或两个以上的M指令时,则只有最后 一个M指令有效。对于不同的铣床制造厂来说,各M指 令的含义可能有所不同,主要的M指令见下表。
第4 章
FANUC0i-M系统的编程与操作
编程说明: (1)G02/G03指定刀具以联动的方式,按地址F规定的合成进给 速度,在G17/G18/G19规定的平面内,从当前位置按顺/逆时针圆 弧路线(联动轴的合成轨迹为圆弧)移动到程序段指令的终点, 如图4-4所示。
图4-4 不同平面G02与G03的选择
第4 章
FANUC 0i-MC系统加工中心A或铣床宏程序
FANUC-0i-MC 系统宏程序虽然子程序对编制相同的加工程序非常有用,但用户宏程序由于允许使用变量、算术和逻辑运算及条件转移,使得编制同样的加工程序更简便。
(一)变量 1.变量的表示变量用变量符号(#)和后面的变量号指定,如:#1;表达式可以用于指定变量号,此时表达式必须封闭在括号中,如:#[#1+#2-12]。
变量号可用变量代替,如#[#3],设#3=1,则#[#3]为#1。
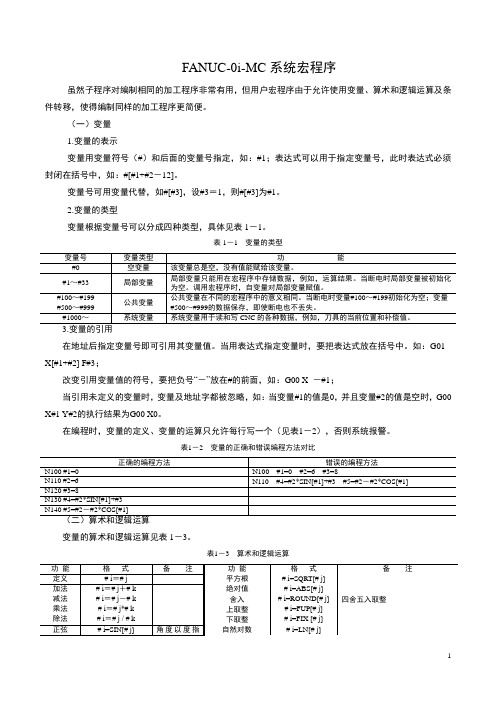
2.变量的类型变量根据变量号可以分成四种类型,具体见表1-1。
表1-1 变量的类型在地址后指定变量号即可引用其变量值。
当用表达式指定变量时,要把表达式放在括号中。
如:G01 X[#1+#2] F#3;改变引用变量值的符号,要把负号“-”放在#的前面,如:G00 X -#1;当引用未定义的变量时,变量及地址字都被忽略,如:当变量#1的值是0,并且变量#2的值是空时,G00 X#1 Y#2的执行结果为G00 X0。
在编程时,变量的定义、变量的运算只允许每行写一个(见表1-2),否则系统报警。
表1-2 变量的正确和错误编程方法对比变量的算术和逻辑运算见表1-3。
表1-3 算术和逻辑运算1.上取整和下取整CNC 处理数值运算时,若操作后产生的整数绝对值大于原数的绝对值时为上取整;若小于原数的绝对值为下取整。
对于负数的处理应注意。
如:#1=1.2,#2=-1.2,则#3=FUP[#1]→#3=2;#3=FIX[#1]→#3=1;#3=FUP[#2]→#3=-2;#3=FIX[#2]→#3=-1。
2.运算次序函数→乘和除运算(*、/、AND )→加和减运算(+、-、OR 、XOR )。
3.括号嵌套括号(方括号)用于改变运算次序。
括号可以使用5级,包括函数内部使用的括号。
圆括号用于注释语句。
如:#1=SIN[[[#2+#3]*#4+#5]*#6] (3重括号) 4.运算符运算符见表1-4。
表1-4 运算符5.(1)# i=ASIN[# j]当参数No.6004#0设为“0”时,90°~270°;当参数No.6004#0设为“1”时,-90°~90°。
FANUC系统宏程序编程

本系统宏程序体系采用FANUC系统宏程序B方式实现一变量普通加工程序直接用数值指定G代码和移动距离;例如,GO1和X100.0。
使用用户宏程序时,数值可以直接指定或用变量指定。
当用变量时,变量值可用程序或用MDI面板上的操作改变。
#1=#2+100G01 X#1 F300说明:变量的表示计算机允许使用变量名,用户宏程序不行。
变量用变量符号(#)和后面的变量号指定。
例如:#1表达式可以用于指定变量号。
此时,表达式必须封闭在括号中。
例如:#[#1+#2-12]变量的类型变量根据变量号可以分成四种类型#0-#49 局部变量局部变量只能用在宏程序中存储数据,例如,运算结果.当断电时,局部变量被初始化为0.调用宏程序时,自变量对局部变量赋值,#50-#499 公共变量公共变量在不同的宏程序中的意义相同.当断电时, 公共变量初始化为0.目前版本中,某些公众变量被赋予特殊意义(系统变量),用于描述CNC运行时各种数据的变化,这些变量包括:#449用于指明固定循环退刀模式(G98,G99), 如在G99方式下,#449变量为1;如在G98方式下,#449变量为-1.#450用于指明当前程序段处于绝对坐标编程模式(G90)还是相对坐标编程模式(G91).如在G90方式下,#450变量为1;如在G91方式下,#450变量为-1.#451,#452,#453,#454用于存储刀具当前位置(X,Y,Z,A轴)在后期的版本中,将会安排专门的空间作为系统变量区.变量值的范围局部变量和公共变量在系统内采用浮点数方式存储小数点的省略当在程序中定义变量值时,小数点可以省略。
例:当定义#1=123;变量#1的实际值是123.000。
变量的引用为在程序中使用变量值,指定后跟变量号的地址。
例如:G01X#1+#2F#3或者G01X[#1+#2]F#3限制程序号,顺序号和任选程序段跳转号不能使用变量。
例:下面情况不能使用变量:0#1;/#2G00X100.0;N#3Y200.0;二算术运算和逻辑运算置换#I=#j算术运算加:#I=#j+#k,减:#I=#j-#k,乘:#I=#j*#k,除:#I=#j/#k。
试谈FANUC0i数控系统的基本编程指令

• 直线插补定位和非直线插补定位如图6-8所示。
2021/8/6
3
2021/8/6
图6-8 直线插补定位和非直线插补定位
4
• G00指令中的快速移动速度由机床制造厂对每个 轴单独设定到参数No.1420 中。由G00指令的定 位方式,在程序段的开始刀具加速到预定的速度, 而在程序的终点减速。在确认到位之后,执行下 个程序段。“到位”是指进给电机将工作台拖至 了指定的位置范围内 。这个范围由机床制造厂 决定并设置到参数No.1826中。通过设定参数 No.1601#5(NCI),可以不进行对各程序段的 到位检测。
2021/8/6
图6-20 当OFH(参数No.5001#2)=1时(A/B)
32
• b.刀具长度偏置C。当指定和修改刀具长度偏置C的偏 置号时,偏置号的有效顺序,取决于下述条件。
• a)当OFH(参数No.5001#2)=0时。如图6-21所示。 • b)当OFH(参数No.5001#2)=1时。如图6-22所示。
• a.刀具长度偏置A/B。当指定或修改刀具长度偏置A/B的偏
置号时,偏置号的有效顺序,取决于下述条件。 • a)当OFH(参数No.5001#2)=0时。如图6-19所示。 • b)当OFH(参数No.5001#2)=1时。如图6-20所示。
2021/8/6
31
图6-19 当OFH(参数No.5001#2)=0时(A/B)
2021/8/6
28
• 2)指令格式。 • ①刀具长度偏置A:G43 Z_H_;G44 Z_H_; • ②刀具长度偏置B:G17 G43 Z_H_;G17 G44 Z_H_;
FANUC_0i_Mate_MC数控加工中心电气设计和调试(DOC)
前言数控机床集计算机技术、电子技术、自动控制、传感测量、机械制造、网络通信技术于一体,是典型的机电一体化产品,它的发展和运用,开创了制造业的新时代,改变了制造业的生产方式、产业结构、管理方式,使世界制造业的格局发生了巨大变化。
现代的CAD/CAM、FMS、CIMS等,都是建立在数控技术之上。
数控技术水平的高低已成为衡量一个国家制造业水平的核心标志,实现加工机床及生产过程的数控化,已经成为当今制造业的发展方向。
我国是世界上机床产量最多的国家,但数控机床的产品竞争力在国际市场中仍处于较低水平,即使在国内市场也面临着严峻的形势:一方面国内市场对各类机床产品特别是数控机床有大量的需求,而另一方面却有不少国产机床滞销积压,国内机床产品充斥市场,严重影响我国数控机床自主发展的势头。
这种现象的出现,除了有经营上、产品质量上和促销手段上等的原因外,一个最主要的原因就是新产品(包括基型、变型和专用机床)的开发周期长,不能及时针对用户的需求提供满意的产品。
本论文采用的是FANUC数控加工中心系统,深入浅出地介绍了FANUC数控加工中心的电气原理图、PMC程序的编制和简单系统的调试等。
电气原理图与PLC程序设计是这次设计中的重点内容,同时也是难点。
由于本人水平有限,设计中的错误和不足之处在所难免,敬请各位指导老师和验收老师批评指正。
目录前言 (1)第一章绪论 (3)1.1 选题背景 (3)1.2 FANUC数控系统概述 (4)1.2.1 FANUC数控系统的主要类型 (4)1.2.2 FANUC数控系统的特点 (4)1.2.3 FANUC 0系列的主要功能及特点 (5)1.2.4 FANUC 0i系列的主要功能及特点 (5)1.3 FANUC数控加工中心的创新与应用 (6)第二章 FANUC加工中心电气原理图的设计 (6)2.1 常用电器的选型 (6)2.1.1 伺服电机的选型 (6)2.1.2 低压元器件选择 (7)2.2 电气原路图的基础知识 (8)2.2.1 电气原理图 (8)2.2.2 电气原路图的构成要素 (8)2.2.3 电气原路图的画法规则 (8)2.3 电气原理图的设计原则和设计步骤 (9)2.3.1 电气原理图中的图形符号、文字符号和接线端子标记 (9)2.3.2 电气原理图 (9)2.4 电气原理图电路示例 (12)第三章 FANUC PMC程序的设计 (14)3.1 概述 (14)3.2 PMC的地址 (15)3.3 PMC程序的结构 (16)3.4 基本指令 (16)3.5 功能指令 (18)3.5.1功能指令的格式 (19)3.5.2部分功能指令说明 (20)3.6 FANUC数控加工中心PMC的分析 (24)3.6.1 I/O分配表 (24)3.6.2 PLC完成M功能信号的处理 (25)第四章系统的调试 (27)4.1 FANUC Oi Mate-MC数控系统操作面板 (27)4.2 参数的显示 (28)4.3 用MDI设定参数 (29)4.4 重要参数的设定 (30)4.4.1 有关“SETTING”的参数 (30)4.4.2 有关轴控制/设定单位的参数..........................324.4.3 有关存储式行程检测的参数...........................354.4.4 有关进给速度的参数.................................354.4.5 有关加减速控制的参数 (35)4.4.6 有关伺服的参数 (35)4.4.7 有关DI/DO的参数 (36)4.4.8 有关MDI、显示和编辑的参数 (37)4.4.9 有关程序的参数 (39)4.4.10 有关螺距误差补偿的参数 (39)4.4.11 有关主轴控制的参数 (40)结论 (41)致谢 (41)参考文献 (42)第一章绪论1.1 选题背景加工中心(Machining Center,简称MC)是一种备有刀库并能自动更换刀具对工件进行多工序加工的数控机床。
FANUC 0i-MC数控系统编程指令及应用

度补偿,如图5-1所示。对于数控铣床和加工中心,通常都是在XY坐
标平面内进行轮廓加工。该组指令为模态指令,一般系统初始状态为
G17状态,故G17可省略。
指令格式 ;
G17 G18 G19
下一页 返回
5.1 尺寸系统指令
G17用来选择X/Y平面 G18用来选择X/Z平面 G19用来选择Y/Z平面 G17、G18、G19三个坐标平面的含义见表5-2 。
第5章 FANUC 0i-MC数控系统编程指 令及应用
5.1 尺寸系统指令 5.2 坐标轴运动指令 5.3 主轴运动指令 5.4 进给速度指令(G94、G95) 5.5 刀具和刀具补偿 5.6 辅助功能(M) 5.7 标准铣削循环及子程序调用
下一页
第5章 FANUC 0i-MC数控系统编程指 令及应用
功能:刀具以圆弧轨迹从起始点移动到终点。
指令格式:在XY平面内的圆弧:
G02
R _
G17 G03 X_ Z_ I _ J _ F_;
上一页 下一页 返回
5.2 坐标轴运动指令
在XZ平面内的圆弧:
G02 G18 G03
X_ Z_
R_ I _ K _
F_;
在YZ平面内的圆弧:
G19
G02 G03
X_ Z_ R _ J _ K _
上一页 下一页 返回
任务一 DHCP服务的安装与配置
(9)在“添加排除”界面中,输入不打算租借给客户机使 用的1P地址范围,可以输入一个IP地址,也可输入一段1P 地址,单击“下一步”按钮,打开图6-11所示的“租约期限” 界面。
(10)在“租约期限”界面中,设置租约时间,租约期限默 认为8天。租约期限是指一个IP地址分配给DHCP客户机后, 此IP地址可以连续使用的最长时限。在租约期限到期时,将 更新租约或收回IP地址。单击“下一步”按钮打开图6-12所 小的“配置DHCP选项”界面。
FANUC0i-M系统的编程指令

图1-9 G28指令与G29指令应用举例
FANUC0i-M系统的编程指令
15.精确停止校验指令 G09 G09指令为非模态指令。 16.精确停止校验方式指令 G61 G61与G09的区别是G61为模态指令,而G09指令为非模态指令。 17.切削进给方式指令 G64 18.暂停指令 G04 编程格式: G04 X_(或P_); 19.进給功能设定指令 G94、G95
图1-11 刀具半径补偿方向
FANUC0i-M系统的编程指令
2.刀径补偿的应用
刀径补偿功能给数控加工带来了方便,
简化了编程工作。编程人员不但可以直 接按零件轮廓编程,而且还可以用同一 个加工程序,对零件轮廓进行粗、精加 工。如图1-12所示,当按零件轮廓编程 以后,在粗加工零件时可以把偏移量设 为d,d=Δ+R,其中,R为铣刀半径,Δ 为精加工前的加工余量,那么零件被加 工完成以后将得到一个比零件轮廓ABC DEFG各边都大Δ的零件轮廓A′B′C′D′E′F ′G′。在精加工零件时,设偏移量d=R, 这样零件被加工完后,将得到零件的实 际轮廓ABCDEFG。
1.进给速度 F F指令表示刀具中心运动时的进给速度。由F和其后的若干数 字组成。F的单位取决于G94(每分钟进给量,单位为mm/min )或G95(每转进给量,单位为mm/r)。 2.主轴功能 S S指令表示铣床主轴的转速,由S和其后的若干数字组成,其 后的数值表示主轴速度,单位为转/分钟(r/min)。 3.刀具功能 T T指令用于选刀,其后的数值表示选择的刀具号。
程序结束 主轴正转 主轴反转 主轴停转 冷却液开 冷却液关 程序结束 子程序调用 子程序结束
程序结束后不返回到程序开头的位置 从主轴前端向主轴尾端看时为逆时针 从主轴前端向主轴尾端看时为顺时针 执行该指令后,主轴停止转动 执行该指令时,应先使冷却液开关位于AUTO的位置 — 程序结束后自动返回到程序开头的位置 程序段中用“P”表示子程序地址 —
基于FANUC 0i数控系统宏程序应用研究
2、宏 程 序 与 普 通 程 序 的 对 比
通常所讲 的数控指 令是 指I0代码指令 编程 , s 即每个代码 的功 部 的各 种 指 令 代码 , 如 圆 弧插 补 或螺 旋 插补 指 令 等 。 执 行 宏程 序 例 在
能 是 定 的 , 系 统 生 产 厂 家 开 发 , 用 者 只 需 ( 能 ) 照规 定 编 时 , 系统 可 以直 接 识别 这些 指 令进 行插 补运 算 , 由 使 只 按 数控 且运 算速 度极 快 , 程 即 可 。 有 时 候 这 些 指 令 满 足 不 了用 户 的 需 要 , 统 因 此提 供 了 再 加 上伺 服 电动 机 和 机 床 的迅 速 响 应 , 得 加 工 效率 极 高 。 但 系 使 用户 宏程 序 功 能 , 用 户 可 以 对 数 控 系 统 进 行 … 定 的 功 能 扩 展 , 使 实 际上 是 数 控 系 统 对 用 户 的 开放 , 可 视为 用 户 利 用 数 控 系 统 提 供 的 也 而 对 于 CAD C / AM软 件 生 成 的 程 序 , 况 则要 复 杂 的 多 。 情 首先, CAD/CAM软 件 生 成 的 了路 轨迹 生 成 不 够优 化 合 理 。 J 工上 , 数控 系 统 的 平 台 上 进 行 二 次开 发 , 然 这 的开 放 和 开 发 c I C M软件 中, 在 当 ) A A / 生成刀路轨迹的实质就是在允许的误差值范同内滑 都是有条件 和有限制 的。 每条路径用直线去逼近曲面的过程。 这样任意曲面 自然都能对付 , 日 而 ・ 的 区 别 , 识 和 』解 这 些 区 也 是完 全合理 的做 法 , 是枉 加工 规则 曲面 (『 定 认 , 但 女 1球面 ) , 艺 就 …现 l 时 工 卜 别, 将 ‘ r宏 序 的学 >押 解 和 掌 握运 用 , 1 1 E, 宏程 序 和 r ‘ 题 , 助 J 表 .为 jL }r I 些 由丁 C D C M ̄件 构造 曲 面的底层 数学 模 型所 限 , H A /A  ̄ 也 I 黹通程序 的简要对 比。
FANUC 0I PMC 编程实例
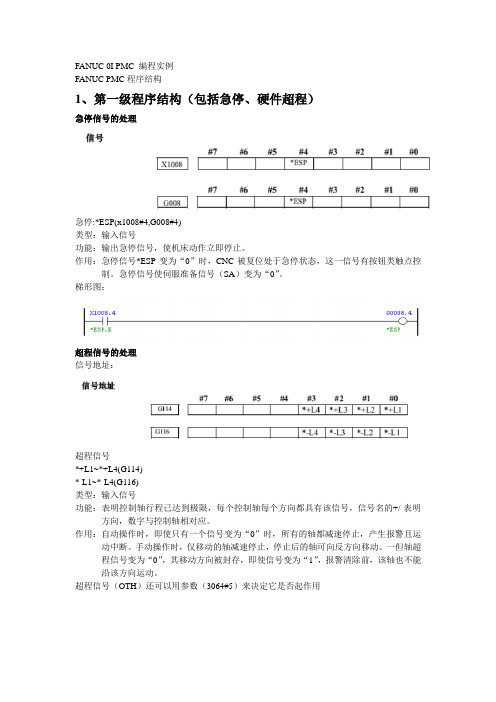
FANUC 0I PMC 编程实例FANUC PMC程序结构1、第一级程序结构(包括急停、硬件超程)急停信号的处理急停:*ESP(x1008#4,G008#4)类型:输入信号功能:输出急停信号,使机床动作立即停止。
作用:急停信号*ESP变为“0”时,CNC被复位处于急停状态,这一信号有按钮类触点控制。
急停信号使伺服准备信号(SA)变为“0”。
梯形图:超程信号的处理信号地址:超程信号*+L1~*+L4(G114)*-L1~*-L4(G116)类型:输入信号功能:表明控制轴行程已达到极限,每个控制轴每个方向都具有该信号,信号名的+/-表明方向,数字与控制轴相对应。
作用:自动操作时,即使只有一个信号变为“0”时,所有的轴都减速停止,产生报警且运动中断。
手动操作时,仅移动的轴减速停止,停止后的轴可向反方向移动。
一但轴超程信号变为“0”,其移动方向被封存,即使信号变为“1”,报警清除前,该轴也不能沿该方向运动。
超程信号(OTH)还可以用参数(3064#5)来决定它是否起作用梯形图:在顺序程序中必须给出一次急停、超程梯形图,可在第一级程序末尾,或当没有第一级程序时,排在第二级程序开头。
第二级程序包括:准备、模式选择、JOG、HNDL、REF、EDIT、MEMORY、MFNC、SFNC、TFNC、OTHER。
一、准备信号处理开机脉冲、CNC就绪信号、伺服就绪信号、复位信号、报警信号1、开机脉冲指令:2、CNC就绪信号[MA(F001#7)]类别:输出信号功能:CNC就绪信号,表明CNC已经就绪。
作用:CNC就绪后,该信号设为1。
通常通电后数秒钟内置为1。
如果系统出现报警,信号为0。
执行急停或类似操作时,该信号保持为1。
信号地址:梯形图:3、伺服就绪信号[SA(F000#6)]类别:输出信号功能:伺服系统就绪后,SA信号变为1。
作用:对于带制动器的轴,输出此信号时解除制动,不输出此信号时,表示制动。
信号地址:梯形图:4、复位信号(F1.1:RST)在下列情况下,CNC被复位且进入复位状态。
基于FANUC-0i数控铣系统的镜像指令与宏程序在生产中的使用技巧

基于FANUC-0i数控铣系统的镜像指令与宏程序在生产中的使用技巧李福运【摘要】The mirroring is the G function instruction provided to the user in the CNC milling system.It has the advantages of high efficiency and convenience for processing the parts with the same shape or similar proportions in the numerical control milling process.However,due to the process requirements in practice,particularly for the problem of large amount of calculation in the process of the workpiece with large machining allowance,the author combines some processing cases,adopts macro programming to solve programming problems,then coordinates simplified processing of parts with the same shape or proportion of the same image instructions,finally realizes multiplier effect by manual programming.%镜像是数控铣削系统中提供给用户的G功能指令,采用该指令程序可高效、方便地处理数控铣削加工中具有形状相同或比例相似的零件;但存在加工程序分层时计算量大,计算复杂等问题.针对上述问题,结合生产中加工实例,采用具有逻辑运算和算术运算功能的宏程序,配合镜像指令形状相同或比例相似的零件结构简化处理,实现了手工编程事半功倍的加工效果.【期刊名称】《新技术新工艺》【年(卷),期】2017(000)007【总页数】3页(P41-43)【关键词】镜像;数控铣削;宏程序;功能指令【作者】李福运【作者单位】广东松山职业技术学院,广东韶关 512126【正文语种】中文【中图分类】TG659镜像是数控铣削系统中提供给用户的G功能指令之一,其指令格式如下:G51.1 X_Y_;G50.1 X_Y_;格式中,G51.1是镜像设定;X_Y_是通过坐标值指定镜像的坐标轴或点;G50.1是镜像取消[1]。
FANUC_0i-MB系统加工中心编程指令及实训操作

G27
返回参考点检测
G74
左旋攻丝循环
G28
返回参考点
G76
精镗循环
G29
00 从参考点返回
G80*固ຫໍສະໝຸດ 循环取消/外部操作功能取消G30
返回第 2,3,4 参考点
G81
钻孔循环、锪镗循环或外部操作功能
G31
跳跃功能
G82
钻孔循环或反镗循环
G33
01 螺纹切削
图 3-6 局部坐标系与工件坐标系的关系
程序名 换上 1 号刀 选择 G54 工件坐标系,绝对编程,快速移动到 Z35,在 Z 方向调入了刀具长度补偿 刀具快速移动到 G54 工件坐标系设定的点 主轴正转,转速 600r/min 快速定位,切削液开 调用子程序 O8001 加工下平面的型腔 Z 轴快速上移,切削液关 Z 轴快速移动到机床坐标 Z0 处 主轴停转 换上 2 号刀 选择 G55 工件坐标系,绝对编程,快速移动到 Z20,在 Z 方向调入了刀具长度补偿 刀具快速移动到 G55 工件坐标系设定的点 主轴正转,转速 600r/min 快速定位,切削液开 调用子程序 O8002 加工上平面的型腔 Z 轴快速上移,切削液关 取消刀具长度补偿,Z 轴快速移动到机床坐标 Z0 处 程序结束
注:①带*号的 G 指令表示接通电源时,即为该 G 指令的状态。G00、G01;G17、G18、G19;G90、G91 由参数设定选择。
②00 组 G 指令中,除了 G10 和 G11 以外其它的都是非模态 G 指令。
③一旦指令了 G 指令表中没有的 G 指令,显示报警。(NO.010)
④不同组的 G 指令在同一个程序段中可以指令多个,但如果在同一个程序段中指令了两个或两个以上同一组的 G 指令时,
FANUC0i系统CNC铣机的递推平行铣制程编写与宏程序的方法分析说明书

Reciprocating Parallel Milling Macro ProgrammingMingyao WangCollege of Mechanical Engineering, Dalian Vocational Technical College, Dalian ,116037,China****************Key words: CNC milling machine; reciprocating parallel milling; macro programAbstract. The reciprocating parallel milling processing program is written by using the plunge count and plunge height in the Z direction on CKA6136 CNC milling machine of FANUC0i system and the method and idea of writing the milling open parts surface program by macro programming are analyzed.In the parts processing with CNC milling machine, the parts are often required to have open surfaces. If there are a small batch and a large variety of parts, the conventional manual programming will cause heavy workload and mistakes easily, so MasterCAM, UG and other software can be used for automatic programming. However, a simple plane may produce hundreds or thousands of programs. Considering this and according to their similarities that require milling open surfaces, the assignments of several variables can be changed for the processing of milling open surfaces of parts with a program if the macro programming is adopted, even if the size of parts to be processed is different, without writing any special program.Figure IThe basic idea of programming is to first determine the milling route of a single layer and then determine the changes in height. According to figure I, the surface of parts to be processed is ABCD, the milling cutter moves from AB side to CD side parallel according to the route of a →b→c→d and a reciprocating parallel milling of a single layer can be completed by using the plunge count and plunge height in the Z direction after single-layer milling to reach the processing depth or height.2016 International Conference on Engineering and Advanced Technology (ICEAT-16)1. Write reciprocating parallel milling processing program by using the plunge count in the Z directionIt writes the reciprocating parallel milling processing program by using the plunge count in the Z direction. The origin of coordinates is the center of parts, the flat-bottomed end mill is adopted and the cutter diameter is Φ16.Writing of reciprocating parallel milling program parallel to X-axis:%O0001G54G91 G28 Z0G90 G00 Z100M03 S800#1=100 (Length of rectangle in the X direction: 100mm)#2=100 (Length of rectangle in the Y direction: 100mm)#3=16 (Use the flat-bottomed end mill and the cutter diameter is Φ16)#4=-#2/2 (Determine the coordinate in the Y direction according to the assignment of start point and length of rectangle in the Y direction)#5=0.8 (Modify the gradient of independent variable according to the material and the step is 0.8 times)#7=#5*#3 (The step value is 0.8 times of the cutter diameter)#8=[#1+#3]/2+15 (Determine the coordinate of milling start point of rectangle in the X direction, 15 is the safe distance of displacement)#9=0 (Processing count in the Z direction, the initial assignment is 0)#10=10 (Total removal rate in the Z direction)#11=4 (Working allowance in the Z direction is removed by 4 times)#12=#10/#11 (Determine the cutting depth according to the total amount and count)#13=0 (Coordinate of parts in the Z direction)N1000 G00 X#8 Y#4 F200#9=#9+1 (Determine the start point of X-axis of reciprocating milling, the cycle count in the Z direction plus 1 for each time)#13=#13+#12 (Determine the coordinate of circulatory cutting in the Z direction)G01 Z-#13 (Straightly feed to the cutting depth)#14=#4 (Determine the start point coordinate of Y-axis of reciprocating milling)N2000 G01 X-#8 (Process from the right side to the left side of workpiece parallel )#14=#14+#7 (Determine the step value)Y#14 (Process on the left side of parts parallel to Y-axis)X#8 (Process from the left side to the right side of workpiece parallel )#14=#14+#7 (Determine the step value)Y#14 (Process on the right side of parts parallel to Y-axis)I F [#14 L T[#2/2+0.2*#3]] GOTO2000 (Conditional transfer statement, conditional judgment of processing location at Y-axisG0 Z30 (Lift the cutter to the safe location after parallel milling)I F [#9 L T#11] GOTO1000 (Conditional transfer statement, conditional judgment of count in the Z direction)G0 Z200M05M30%2. Write reciprocating parallel milling processing program by using the plunge height in the Z directionIt writes the reciprocating parallel milling processing program by using the plunge height in the Z direction. The origin of coordinates is the center of parts, the flat-bottomed end mill is adopted and the cutter diameter is Φ16.%O0002G54G91 G28 Z0G90 G00 Z100M03 S800#1=100(Length of rectangle in the X direction: 100mm)#2=100 (Length of rectangle in the Y direction: 100mm)#3=16 (Use the flat-bottomed end mill and the cutter diameter is Φ16)#4=-#2/2 (Determine the coordinate in the Y direction according to the assignment of start point and length of rectangle in the Y direction)#5=0.8 (Modify the gradient of independent variable according to the material and the step is 0.8 times)#7=#5*#3 (The step value is 0.8 times of the cutter diameter)#8=[#1+#3]/2+15 (Determine the coordinate of milling start point of rectangle in the X direction, 15 is the safe distance of displacement)#9=0 (Coordinate assignment in the Z direction, the initial value is 0)#10=30 (Total removal rate in the Z direction)#11=5 (Removal height in the Z direction)N3000 G00 X#8 Y#4 F200 (Determine the start point of X-axis of reciprocating milling)#9=#9+#11 (Processing height assignment in the Z direction)Z-#9F200 (Height from plunge to assignment in the Z direction)#14=#4 (Determine the start point of Y-axis of reciprocating milling)N2000 G01 X-#8 (Process from the right side to the left side of workpiece parallel )#14=#14+#7 (Determine the step value)Y#14 (Process on the left side of parts parallel to Y-axis)X#8 (Process from the left side to the right side of workpiece parallel )#14=#14+#7 (Determine the step value)Y#14 (Process on the right side of parts parallel to Y-axis)I F [#14 L T[#2/2+0.2*#3]] GOTO3000 (Conditional transfer statement, conditional judgment of processing location at Y-axisG0 Z30 (Lift the cutter to the safe location after parallel milling)I F [#9 L T#10] GOTO4000 (Conditional transfer statement, judgment of processing height in the Z direction)G0 Z200M05M30%3. ConclusionThe programming should first determine the independent variable and then determine the plunge direction whether it is parallel to X-axis or Y-axis according to the milling direction of parts and finally conduct conditional judgment of end point by using the conditional transfer statement. During parallel reciprocating milling, the step determines the processing speed. If the step is small, there will be more operations of CNC system and plunge counts, thus the processing efficiency is low and the precision is high; if the step is large, there will be less operations of CNC system and plunge counts, thus the processing efficiency is high and the precision is low. Therefore, the step must be chosen reasonably according to the processing requirements. Generally, a larger step is chosen on the premise of meeting the processing requirements. The single-layer processing is completed by using the plunge count or plunge height in the Z direction. In addition, attention should be paid to the location of the origin of coordinate of program during programming and tool setting.References[1]Peter Smid, CNC Programming Handbook. Beijing: Chemical industry Press, 2005.[2]Shen Jianfeng, Yujun. Numerical Control Lathe Worker( advanced). Beijing: Engineering Industry Press, 2006.[3]Zhou Baoniu. CNC Programming and Machining Technology. Beijing: Engineering Industry Press, 2009.。
第5章 FANUC 0i-MC数控系统

G1 8 G1 9
下一页 返回
5.1 尺寸系统指令
G17用来选择X/Y平面 G18用来选择X/Z平面 G19用来选择Y/Z平面 G17、G18、G19三个坐标平面的含义见表5-2 。
5.1.2工件坐标系设定(G92、G54~G59)
工件坐标系设定指令是规定工件坐标系原点的指令,工件坐标系 原点又称编程零点。数控编程时,必须先建立工件坐标系,用以确定 刀具刀位点在坐标系中的坐标值。工件坐标系可用下述两种方法设定: 用G92指令和其后的数据来设定工件坐标系;或事先用操作面板设定 坐标轴的偏置,再用G54~G59指令来选择。
上一页 下一页 返回
5.1 尺寸系统指令
1)用G92指令设定工件坐标系 功能 :G92指令是规定工件坐标系原点(程序零点)的指令。 指令格式 : G92 X_ Y_ Z_ 其中,X_ Y_ Z_是指主轴上刀具的基 准点在新坐标系中的坐标值,因而是绝对值指令。 以后被指令的绝对值指令就是这个坐标系中的位置。 编程举例 :如图5-2所示。 刀具基准点设在刀位点时, 指令:G92 X25 Z23;工件坐标系 原点被设在距刀位点X轴25,Z轴23的位置上。 若刀具基准点设在主轴头时,指令:G92 X25 Z256;工件坐标系 原点被设在距主轴头X轴25,Z轴256的位置上。 说明:执行G92指令时,机床不动作,即X、Y、Z轴均不移动。
上一页 返回
5.3 主轴运动指令
主轴功能S控制主轴转速,其后的数值表示主轴速度,单位为转/ 分钟(r/min)。S是模态指令,S功能只有在主轴转速可调节时有效。主 轴的旋转指令则由M03或M04实现。 1.恒定表面速度控制指令(G96) 指令格式:G96 S_ ;其中:S_ 为切削速度 2.恒定表面速度控制取消指令(G97) 指令格式:G97 S_ ;其中:S_ 为主轴每分钟的转速。 3.最高主轴速度箝制(G92) 指令格式:G92 S_ ;其中:S_ 为主轴每分钟最高转速。
基于FANUC系统的宏程序应用
江苏畜牧兽医职业技术学院毕业设计(论文)题目:基于FANUC系统的宏程序应用姓名:孙杰学号:200906063134二级院系部:机电工程系班级: 数控091专业:数控技术指导教师:陈强职称:实验师二〇一二年六月基于FANUC系统的宏程序应用【摘要】宏程序是对数控系统的一种功能扩展,即在其功能平台上进行开发,开发出来的程序称之为宏程序。
宏程序是数控系统中一种具有计算能力和决策能力的数控程序,也可称之为参数化编程。
论文首先从数控宏指令的特点、加工零件的范围着手,对用户宏程序B的数学应用基础、变量赋值、运算、循环、转移等功能,及非模态指令G65、G66/G67,G和M代码指令的调用进行说明。
然后,基于FANUC数控系统的宏程序,解决自动编程中无法进行参数化编程的难题,编制出可在数控车床上加工的椭圆、双曲线、抛物线三种二次曲线的走刀指令,实现非圆曲线的二次开发。
同时,采用FANUC数控系统宏程序对数控铣床上典型工序模型凸台、斜面、以及包含各类二次圆锥曲线的曲面等进行编程及仿真加工,有利于实现程序模块化,并达到较高的效率。
最后,应用宏程序对椭圆手柄、平行四边形框点式孔群两种典型零件进行编程和仿真加工,验证宏程序加工的特点。
用户宏程序B可以使用数学函数进行参数编程,实现编程的参数化,无需进行大量繁琐的计算。
其次,它还具有通用性,参数易于修改、程序可循环使用等特点。
在相似的工序中,修改相关参数即可实现宏程序多次使用。
【关键词】宏程序, 参数化, 自动编程Macroprogram is a kind of function expansion to the CNC system, namely, we can develop on its function platform ,we call the program what is developed out as the macroprogram. Macroprogram is a kind of CNC program which keeps the calculating power and decision power, also called nc parametric programming.Firstly, the essay begins with the feature of CNC macro instrucion and the scope of processing pieces, explaining the function of mathematical application basis user macroprogram B, variable assignment, operation circle, shift and transferring the non-modal order G65,G66\G67,the code order of G and M. Secondly, it bases on the macroprogram of FANUC CNC system, solving the problem of unable parameterization programming during automatic programming, compiling out the knife order of the oval, hyperbolic cure, parabolic curve three kinds quadratic curve which can work on the NCN lathe, and realized secondary development of the non-circular curve. At the same time, we can use the FANUC CNC system macroprogram to compile and process the typical production model boss, obliquity, and the curved surface of all kinds off secondary cone curve on the CNC lathe. It is beneficial to realize the program modeling and achieve higher efficiency. Finally, we can apply macroprogram to compile and process on the two typical parts of oval rein and orifice parallelogram. We also can check the working feature of marcoprogram.We use the mathematical function to make a parameteic program to the user marcoprogram and realize the parameterization programming. It is unnecessary to carry on so hitty-gritty calculation.Secondly, it also has the feature of generality, the parameter is easy to be revised and program can cyclic utilization. On the same production, we can realize macroprogram multiple use when we revise the related parameter.Key wordmacro program, Parametric, Automatic programming摘要 (I)关键词 (I)ABSTRACT (II)KEY WORD (II)目录 (III)绪论 (1)1.宏程序的概述 (2)1.1宏程序的含义 (2)1.2宏程序的发展现状 (2)2.宏程序转移和循环 (3)2.1变量 (3)2.1.1变量表示 (3)2.1.2自变量的指定 (3)2.2算术与逻辑运算 (5)2.3转移与循环 (5)2.3.1无条件转移及条件转移 (6)2.3.2 循环 (8)3.宏程序的实例应用 (13)3.1加工零件图 (13)3.2制定加工工艺 (13)3.2.1 工艺分析: (13)3.2.2制定加工工艺路线: (13)设计总结 (15)参考文献 (16)致谢 (17)附录1 (18)在现代制造系统中,数控技术是一门关键技术,其研究、开发、产业化及应用推广、人才培养必将推动制造业自动化的进一步发展,为提高国家工业现代化水平和综合国力奠定基础。
FANUC0i系统_宏程序教学教材

2.非规则曲面的编程方法
(1)自动编程法
(2)宏程序法
宏程序的编程加工,一般是采用厂方所提供的宏程
序(或用户自行开发的宏程序)通过对变量进行赋值及处
理后完成程序的加工任务。 普通加工程序直接用数值指定G代码和移动距离;例
如,G01X100.0Z2.0。 使用用户宏程序时,数值可以直接指定或用变量指
表3 比较运算符
运算符
含义
EQ 相等equal to (=)
NE 不等于not equal to (≠)
GT 大于Greater than (>)
GE 大于等于greater than or equal to(≥)
LT 小于less than (<)
LE 小于等于less than or equal to (≤)
定。当用变量时,变量值可用程序或用MDI 面板上的 操作改变。
二、宏程序编程 1、变量的表示
一个变量由符号“#”和变量序号组成,如:#i (i=1, 2,3,…),此外,变量还可以用表达式进行表示,但 其表达式必须全部写入方括号“[ ]”中。
例: #100,#500,#5,#[#1+#2+10];
5、宏程序指令
(1)无条件转移
格式:GOTO n; n——(转移到的程序段)顺序号
例:GOTO1;
GOTO#10;
(2)条件分支IF语句
在IF后指定一条件,当条件满足时,转移到顺序号为n的程
序段,不满足则执行下一程序段。
格式:
例:O0002(宏程序)
IF [表达式] GOTOn;
N5 IF
…;
[#3GT90.0]GOTO10; …;
基于FANUC 0i-MB系统的宏程序参数化编程研究
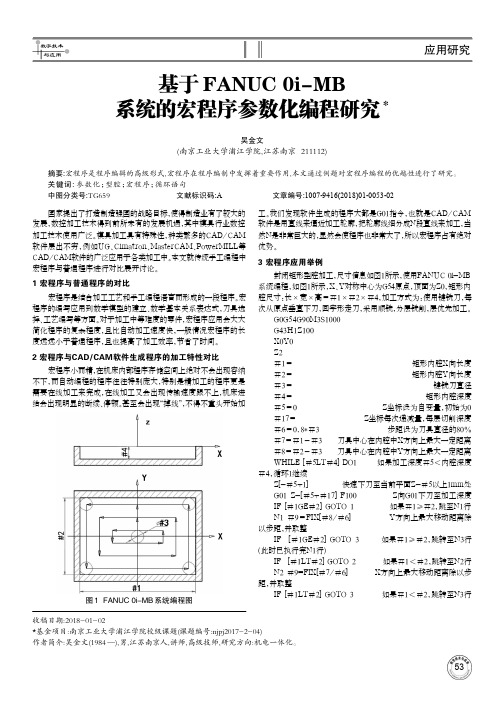
数字技术 与应用应用研究基于 FANUC 0i-MB 系统的宏程序参数化编程研究 *吴金文 (南京工业大学浦江学院,江苏南京 211112)摘要:宏程序是程序编辑的高级形式,宏程序在程序编制中发挥着重要作用,本文通过例题对宏程序编程的优越性进行了研究。
关键词: 参数化;型腔;宏 程序;循环语句中图分类号:TG659文献标识码:A文章编号:1007-9416(2018)01-0053-02国家提出了打造制造强国的战略目标,使得制造业有了较大的 发展,数控加工技术得到前所未有的发展机遇,其中模具行业数控 加工技术使用广泛。
模具加工具有特殊性,种类繁多的CAD/CAM 软件层出不穷,例如UG、Cimatron、MasterCAM、PowerMILL等 CAD/CAM软件的广泛应用于各类加工中。
本文就传统手工编程中 宏程序与普通程序进行对比展开讨论。
1 宏程序与普通程序的对比宏程序是结合加工工艺和手工编程语言而形成的一段程序。
宏 程序的编写应用到数学模型的建立、数学基本关系表达式,刀具选 择、工艺编写等方面。
对于加工中等难度的零件,宏程序应用会大大 简化程序的复杂程度,且比自动加工速度快,一般情况宏程序的长 度远远小于普通程序,且也提高了加工效率,节省了时间。
2 宏程序与CAD/CAM软件生成程序的加工特性对比宏程序小而精,在机床内部程序存储空间上绝对不会出现容纳 不下,而自动编程的程序往往特别庞大,特别是精加工的程序更是 需要在线加工来完成,在线加工又会出现传输速度跟不上,机床进 给会出现明显的断续、停顿。
甚至会出现“掉线”,不得不重头开始加图 1 FANUC 0i-MB 系统编程图工。
我们发现软件生成的程序大都是G01指令,也就是CAD/CAM 软件是用直线来逼近加工轮廓,把轮廓线细分成N段直线来加工,当 然N是非常巨大的,显然会使程序也非常大了,所以宏程序占有绝对 优势。
3 宏程序应用举例封闭矩形型腔加工,尺寸信息如图1所示,使用FANUC 0i-MB系统编程,如图1所示,X、Y对称中心为G54原点,顶面为Z0,矩形内腔尺寸:长×宽×高=#1×#2×#4,加工方式为:使用键铣刀,每次从原点垂直下刀,回字形走刀,采用顺铣,分层铣削,层优先加工。