无线射频可视化遥控侦察车带PC操控平台
基于WIFI的视频监控智能小车机器人
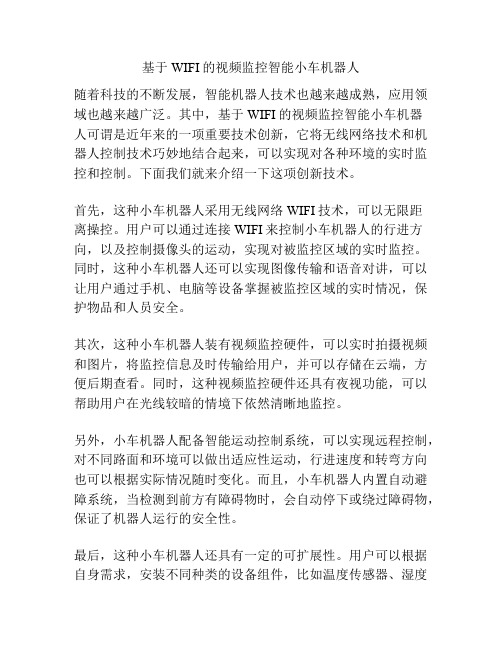
基于WIFI的视频监控智能小车机器人随着科技的不断发展,智能机器人技术也越来越成熟,应用领域也越来越广泛。
其中,基于WIFI的视频监控智能小车机器人可谓是近年来的一项重要技术创新,它将无线网络技术和机器人控制技术巧妙地结合起来,可以实现对各种环境的实时监控和控制。
下面我们就来介绍一下这项创新技术。
首先,这种小车机器人采用无线网络WIFI技术,可以无限距离操控。
用户可以通过连接WIFI来控制小车机器人的行进方向,以及控制摄像头的运动,实现对被监控区域的实时监控。
同时,这种小车机器人还可以实现图像传输和语音对讲,可以让用户通过手机、电脑等设备掌握被监控区域的实时情况,保护物品和人员安全。
其次,这种小车机器人装有视频监控硬件,可以实时拍摄视频和图片,将监控信息及时传输给用户,并可以存储在云端,方便后期查看。
同时,这种视频监控硬件还具有夜视功能,可以帮助用户在光线较暗的情境下依然清晰地监控。
另外,小车机器人配备智能运动控制系统,可以实现远程控制,对不同路面和环境可以做出适应性运动,行进速度和转弯方向也可以根据实际情况随时变化。
而且,小车机器人内置自动避障系统,当检测到前方有障碍物时,会自动停下或绕过障碍物,保证了机器人运行的安全性。
最后,这种小车机器人还具有一定的可扩展性。
用户可以根据自身需求,安装不同种类的设备组件,比如温度传感器、湿度传感器、声音传感器等,实现对不同数据的监控,并可以通过云端平台来处理数据,实现数据的查询和统计,方便用户进行管理和分析。
综上所述,基于WIFI的视频监控智能小车机器人是一种新兴的科技产品,它可以帮助用户实现对被监控区域的实时监控,实现了无限控制距离和自动避障等功能,同时具有可扩展性。
因此,在安防、环保、园林等领域具有广泛的应用前景,也为未来的机器人发展指明了一条新的路线。
射频遥控器操作方法
射频遥控器操作方法射频遥控器是一种通过无线电频率信号来控制电子设备的遥控装置。
它广泛用于家庭影音设备、智能家居、无人机、玩具车等领域。
下面我将详细介绍射频遥控器的操作方法。
首先,射频遥控器通常由两个主要部分组成:遥控器本身和接收器。
遥控器本身由控制按键、显示屏、电源开关和设置按钮等组成,而接收器则位于被控制设备内部,用于接收并执行遥控指令。
1. 开启遥控器电源:首先,在遥控器上找到电源开关,通常位于遥控器的侧面或背面,将其切换至“开启”位置。
2. 配对遥控器与接收器:某些射频遥控器需要配对遥控器与接收器之间的信号,以确保只有配对的遥控器才能控制对应的设备。
配对方法通常在遥控器说明书中有详细说明,可根据其指引进行操作。
3. 设置遥控器:如果遥控器拥有设置按钮,可以通过设置按钮来调整一些参数,例如音量大小、显示屏亮度等。
按下设置按钮后,遥控器屏幕上会出现相关选项,通过按键选择和确认来完成设置。
4. 选择设备:遥控器通常可以同时控制多个设备,例如电视、音响、空调等。
要控制特定设备,需要在遥控器上切换到对应的设备模式。
通常在遥控器顶部或侧面有个模式选择按钮或滑块,通过切换模式来选择需要控制的设备。
5. 发送指令:射频遥控器的主要功能是发送指令给接收器,从而控制设备的操作。
根据要控制的设备不同,遥控器上的按键功能也会有所差异。
通常有些常见的按键功能包括:电源开关、频道切换、音量调节、菜单控制等。
通过按下对应的按键,遥控器会发送对应的信号给接收器,从而执行相应的操作。
6. 遥控距离:射频遥控器的操作要求在一定的距离范围内进行。
一般情况下,操作距离为10米左右,但实际距离可能会受到环境干扰、遥控器电池电量等因素的影响。
在操作时要注意保持一定的距离,确保信号的稳定传输。
7. 遥控器电池更换:随着使用时间的增长,遥控器电池可能会耗尽,这时需要更换电池。
通常,遥控器背面会有一个电池仓,拧下电池仓盖,将电池按照正确的极性放入即可。
Doublecom无线监控行业应用手册

如需详细产品资料或解决方案,请与我们联系,我们将为您提供最优质的服务。
免费服务热线
4006 866 288
大型企业内部定点监控、移动监控,无线上网、无线 VOIP 通话, ,工业PLC 无线控制。 还可以应用于学校、小区、医院、景区、园林、酒店、国家重点保护单位的无线监控、无线上网。
5、油田、天然气、水库、森林防火、水利的监控遥测
油田/天然气田大多位于沼泽、沙漠和盆地、浅海等区域,因远离城市地广人稀,交通通信等设施 较为落后。建立基于 WLAN 技术建立无线局域网络,实现远距离钻井平台联网,油井无线监控。 全面实施水利系统远程视频实时监控系统,对可能或正在发生的汛情、险情、灾情进行实时动态监控, 实现水电站建设中的施工现场无线远距离监控和灌区的无线远距离联网,实现灌区自动化调度管理,水 文地质检测站远程联网。
10.超强抗干扰能力
四、Doubelcom( 多倍通)成功案例参考
1 济南泉城路派出所车载移动无线监控系统 2 泰安肥城特钢厂无线联网系统 3 淄博宝运化工厂无线监控系统 4 甘肃庆城电力局各变电站无线联网系统 5 淄博傅山集团无线监控系统 6 济宁汶上建筑工地无线监控系统 7 东营广饶油田无线监控系统 8 济南某派出所治安管理无线监控 9 潍坊某市公安局车载移动监控 10 临沂市物流园无线监控 11 济南某棉纺企业无线监控 12 山东青岛某海上无线监控项目 13 山东东营某海岛无线监控项目 14 山东烟台某养殖厂无线监控项目 15 山东烟台海上施工无线监控项目 16 山东东营某社区无线监控项目 17 山东电力550KV 闻韶站无线监控无线覆盖项目 18 山东电力350KV 油城站无线监控无线覆盖项目 19 山东临沂大学城变电站无线网络传输及无线监控传输 20 山东聊城水利局无线网络传输 21 山东滨州移动营业厅 WLAN 无线桥接项目 22 山东移动邹平营业厅无线网络传输 23 山东移动沾化营业厅无线网络传输 24 山东海阳核电站核岛区无线监控项目 25 山西柳林道路电子警察无线监控 26 青岛某服装公司局域网桥接 27 上海徐行政府流动人口无线监控 28 上海某度假村无线宽带上网 29 上海某长途车站车载无线覆盖 30 31 32 33 34 35 36 37 38 39 40 41 42 输 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 上海惠氏奶粉总部分部无线桥接 上海世博会重点路口无线监控 浙江富阳森林防火无线监控 上海某中学无线覆盖 上海某高档写字楼无线桥接上网 烟台某医院无线桥接 烟台龙口政府无线监控 东营利津油田区油井无线监控 东营渤海海上钻井平台无线监控 东营二矿油井无线监控 东营河口林业局森林防火无线监控 东营河口油区办无线监控 甘肃某驾校电子考场无线监控及数据传 武汉某学校无线桥接和无线覆盖 山西 13 个火车站无线监控 山西某煤矿无线桥接 黄河水位无线监控 浙江丽水森林防火无线监控 上海某郊区农村道路无线监控 合肥逍遥津公园无线监控系统 浙江舟山 LED 无线总控系统 连云港森林防火无线监控系统 上海某公园无线监控系统 内蒙古赤峰市数字城管无线监控系统 安徽繁昌一中无线校园网 安徽太和自来水厂无线监控系统 南通通州人民医院无线覆盖系统 江苏淮安数字城管无线监控系统
巡检机器人 维护使用手册说明书

巡检机器人维护使用手册版本:2.0北京眸视科技有限公司目录1.产品概述 (4)1.1.产品概述 (4)1.2.履带式机器人 (5)1.3.轮式机器人 (5)2.机器人开机 (6)2.1.机器人开机 (6)2.2.遥控器使用 (6)2.3.遥控器高级使用 (7)2.4.注意事项 (9)3.平板控制 (10)3.1.Wifi连接 (10)3.2.运行APP (10)3.3.自启动功能 (10)3.4.License更新功能 (11)3.5.参数配置 (14)3.6.状态检查 (15)3.7.开启巡检 (16)4.制图 (17)4.1.制图 (17)4.2.地图编辑 (20)4.3.地图备份与切换 (25)4.4.注意事项 (27)4.4.1.制图之前的准备 (28)4.4.2.建图操作原则 (28)4.4.3.建图结果检查 (30)5.导航 (31)5.1.导航到指定点 (31)5.2.导航到指定坐标 (32)5.3.取消导航 (32)6.1.准备工作 (34)6.2.工具安装 (34)6.2.1.开启root ssh权限 (34)6.2.2.JDK的安装 (35)6.2.3.TOMCAT安装 (35)6.2.4.MySQL数据库在线安装 (36)6.2.5.Redis安装 (37)6.2.6.Nginx安装 (37)6.3.程序部署 (38)6.3.1.前端web程序部署 (38)6.3.2.后端jar包部署 (39)6.4.系统参数配置 (41)6.4.1.域名地址映射 (41)6.4.2./etc/profile确认 (41)6.5.启动管理云平台系统程序 (41)6.5.1.后台java程序启动 (42)6.5.2.前台tomcat启动 (42)6.5.3.确认后台程序是否启动成功 (42)6.5.4.访问系统url (42)7.云平台使用 (43)7.1.系统登录 (43)7.1.1.系统首页 (44)7.1.2.个人中心 (45)7.2.实时监控 (45)7.3.数据查询 (47)7.3.1.巡检报表 (47)7.3.2.巡检点 (48)7.3.3.环境数据 (48)7.4.巡检任务 (49)7.4.1.任务管理 (49)7.4.2.任务日历 (51)7.5.1.巡检点管理 (52)7.5.2.地图管理 (53)7.5.3.机器人管理 (54)7.5.4.告警设置 (55)7.6.系统管理 (56)7.6.1.用户管理 (56)7.6.2.角色管理 (57)7.6.3.菜单管理 (59)7.6.4.场站管理 (59)7.6.5.字典管理 (60)7.6.6.车体状态 (61)7.6.7.版本信息 (62)8.巡检 (63)8.1.启动检查 (63)8.2.云平台操作 (64)9.注意事项 (66)9.1.常规检查 (66)9.2.维护保养 (66)9.3.长期储存 (67)10.快速故障排除 (69)10.1.机器人故障排查 (69)10.2.云端服务故障排查 (71)10.3.遥控器故障排查 (72)附录1:充电桩安装说明 (75)附录2、传感器清洁 (76)附录3、产品参数 (77)1.产品概述1.1.产品概述眸视机器人定位和导航系统,是一个集激光雷达、视觉(双目相机、深度相机)、超声波、惯性测量单元(IMU)等多种传感器于一体的定位和导航系统。
应急通信指挥车方案讲解

应急通信指挥车技术方案目录第一章综述................................................................................................................................ - 1 -1.1 设计思想....................................................................................................................... - 1 -1.2 设计原则....................................................................................................................... - 3 -1.3 建设目标....................................................................................................................... - 3 -1.4 主要功能....................................................................................................................... - 4 -1、通信功能................................................................................................................ - 4 -2、图像采集、处理和传输功能................................................................................ - 4 -3、广播功能................................................................................................................ - 4 -4、照明功能................................................................................................................ - 4 -5、会议功能................................................................................................................ - 4 -6、供配电功能............................................................................................................ - 4 -第二章总体设计........................................................................................................................ - 6 -总体框架和总体拓扑示意图.............................................................................................. - 6 -2.1 无线图像传输系统....................................................................................................... - 7 -2.1.1 TFDM单兵式/密拍式无线图像传输设备传输流程........................................ - 7 -2.1.2 TFDM车载式无线图像传输设备传输流程................................................... - 10 -2.1.3 便携式3G公网无线图像传输设备传输流程 ............................................... - 12 -2.1.3 车载式3G公网无线图像传输设备传输流程 ............................................... - 15 -2.2 照明系统..................................................................................................................... - 18 -2.4 供配电系统................................................................................................................. - 20 -2.4.1 发电机.............................................................................................................. - 21 -2.4.2 APC不间断电源在线式5KV(C3KS)........................................................ - 22 -2.4.3 配电系统设计.................................................................................................. - 23 -2.5 安全警示系统........................................................................................................... - 23 -2.6 其他及辅助系统......................................................................................................... - 23 -2.6.1 广播系统.......................................................................................................... - 23 -第三章车辆改制...................................................................................................................... - 26 -3.1 原车外观与参数......................................................................................................... - 26 -3.2 外观效果图................................................................................................................. - 26 -3.3 总体布局图................................................................................................................. - 27 -3.4 整车配重..................................................................................................................... - 28 -3.5 设备减振..................................................................................................................... - 28 -3.6 系统的可维修性......................................................................................................... - 28 -3.7 设备及人员安全......................................................................................................... - 28 -3.8 电磁干扰(EMC)的解决 ........................................................................................ - 29 -3.9 车内装饰..................................................................................................................... - 29 -3.10 表面处理................................................................................................................... - 30 -3.11 车辆密封................................................................................................................... - 30 -3.12 隔音隔热................................................................................................................... - 30 -第四章设备配置列表......................................................................................错误!未定义书签。
th-x智能小车遥控器说明

th-x智能小车遥控器说明一、简介th-x智能小车遥控器是一款先进的遥控设备,专为控制th-x智能小车而设计。
它采用先进的无线通信技术,能够实现精确的远程控制,为用户提供更便捷、灵活的操控体验。
二、功能特点1. 高精度控制:th-x智能小车遥控器具备高精度的控制能力,可以实时响应用户的指令,并精确控制小车的运动。
无论是前进、后退、转向还是停止,都可以通过遥控器轻松完成。
2. 多种操作模式:遥控器支持多种操作模式,包括手动模式、自动巡航模式和编程模式。
手动模式可让用户自由控制小车的运动;自动巡航模式可使小车按照预设轨迹行驶;编程模式则允许用户自定义指令,实现更复杂的控制逻辑。
3. 可编程性:遥控器内置编程功能,用户可以通过简单的操作,将自己的创意想法转化为实际的行动。
通过编写代码,用户可以实现小车的各种特定功能,如避障、跟随等,从而满足不同场景下的需求。
4. 强大的信号传输能力:th-x智能小车遥控器采用先进的无线通信技术,信号传输稳定可靠。
即使在复杂的环境中,也能保持良好的信号连接,确保用户能够始终掌控小车的运动。
5. 人性化设计:遥控器采用人性化设计,外观简洁大方,握持舒适。
按钮布局合理,使用方便,用户可以轻松上手,快速掌握使用方法。
三、操作说明1. 开机与连接:按下遥控器上的电源按钮,遥控器将会开机并自动连接th-x智能小车。
连接成功后,遥控器上的指示灯将会亮起。
2. 手动模式操作:a. 前进:按下遥控器上的“前进”按钮,小车将会前进。
b. 后退:按下遥控器上的“后退”按钮,小车将会后退。
c. 左转:按下遥控器上的“左转”按钮,小车将会向左转向。
d. 右转:按下遥控器上的“右转”按钮,小车将会向右转向。
e. 停止:按下遥控器上的“停止”按钮,小车将会停止当前的运动。
3. 自动巡航模式操作:a. 设置路径:按下遥控器上的“路径设置”按钮,遥控器将进入路径设置模式。
通过遥控器上的摇杆或方向键,设置小车需要行驶的路径。
基于LabVIEW的无线遥控汽车检测台设计

基于LabVIEW的无线遥控汽车检测台设计杨进成;夏春蕾;戴曙光【摘要】针对传统汽车检测耗时长、统计复杂等问题,在LabVIEW软件基础上,通过CAN通信协议等,提出了汽车遥控数据检测系统设计的方法.采用CAN通讯协议、无线遥控、USB驱动、打印机设计等,可快速完成向工控机发送控制命令,实现汽车功能的检测,并以Excel格式记忆所有的检测结果,其具有快速、稳定、实时记录与打印的性能.实际结果表明,该系统在检测行业、尤其汽车检测方面具有广泛的使用价值.【期刊名称】《电子科技》【年(卷),期】2016(029)010【总页数】4页(P129-132)【关键词】无线自动化测试;CAN总线;LabVIEW;动态调用链接库【作者】杨进成;夏春蕾;戴曙光【作者单位】上海理工大学光电信息与计算机工程学院,上海200093;上海理工大学光电信息与计算机工程学院,上海200093;上海理工大学光电信息与计算机工程学院,上海200093【正文语种】中文【中图分类】TP368.1控制器局部网(CAN总线),解决了汽车电子设备之间的通信问题,减少电子设备之间繁多的信号线[1]。
作为当前流行的网络通信控制方式,其性能远高于传统的控制方式。
CAN总线系统数据稳定可靠,具有线间干扰小、抗干扰能力强的特点[2]。
汽车的集成化模块及功能日益丰富,使用传统的汽车检测方法,会造成人力、物力的大量投入。
因此,CAN通信在汽车上的应用,使大量的检测得到简化。
此设计是基于LabVIEW软件平台上的,利用CAN通讯协议,完成汽车与工控机的信息传输。
再结合无线遥控功能,搭建无线控制汽车检测系统。
主要运用到汽车生产检测,有效、快速帮助使用者遥控完成生产测试。
在生产方面,主要通过CAN通信点亮汽车仪表盘功能以及车用DVD部分,通过控制高低电平、PWM信号等完成检测。
用户通过无线工业遥控器进行遥控操作,同时打印不符合要求的仪器。
所有的操作数据会以Excel格式记录。
无线遥控技术及其在起重机上的应用

起重机无线遥控系统的功能
控制起重机的基本动作: 如升降、伸缩、旋转等。
安全保护功能:如超载保 护、幅度限制、角度限制 等。
ABCD
显示起重机的状态信息: 如负载重量、工作幅度、并提示故障信息, 方便维修人员快速定位和 解决问题。
03
无线遥控技术在起重机 应用中的挑战与解决方 案
随着物联网技术的发展,无线数传模块在工业自动化领域得到广泛 应用,可以实现远程数据采集和控制。
无线遥控技术的应用领域
工业自动化
无线遥控技术可以实现设备的远程控制和监测, 提高生产效率和安全性。
无人机
无线遥控技术是无人机的核心技术之一,可以实 现无人机的远程控制和自主飞行。
ABCD
智能家居
通过无线遥控技术,可以实现家庭设备的远程控 制和智能化管理,提高生活便利性。
特点
无线遥控技术具有远程控制、实时监 测、灵活性强、安全性高等优点,广 泛应用于工业自动化、智能家居、无 人机等领域。
无线遥控技术的发展历程
早期无线电遥控
20世纪初,无线电遥控技术开始出现,主要用于航模和军事领域。
红外线遥控
20世纪70年代,红外线遥控技术开始普及,广泛应用于家电、玩 具等领域。
无线数传模块
优化操作、提升作业能力
详细描述
某大型物流公司起重机的无线遥控系统升级后,优化了操作流程,提升了作业能力,满足了快速装卸货物的需求。
THANKS FOR WATCHING
感谢您的观看
04
无线遥控技术在起重机 应用的发展趋势
无线遥控技术的未来发展方向
技术创新
无线遥控技术将继续在信号传 输、稳定性、安全性等方面进 行技术创新,提高遥控操作的
准确性和可靠性。
天眼Z3无人机远程指挥直播地面站主要技术参数
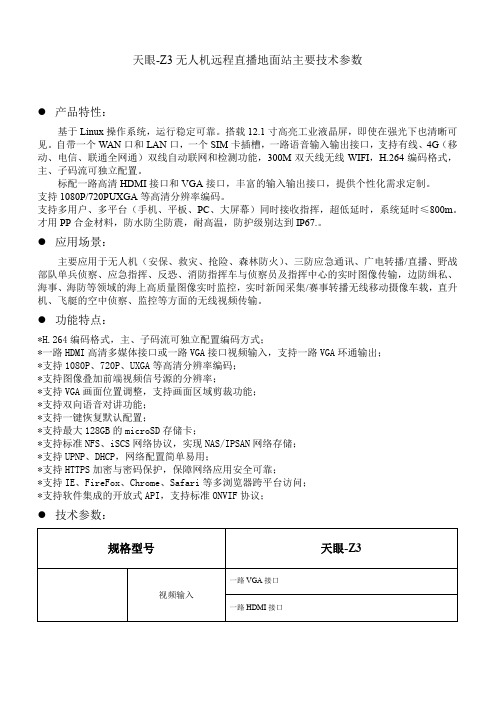
天眼-Z3无人机远程直播地面站主要技术参数●产品特性:基于Linux操作系统,运行稳定可靠。
搭载12.1寸高亮工业液晶屏,即使在强光下也清晰可见。
自带一个WAN口和LAN口,一个SIM卡插槽,一路语音输入输出接口,支持有线、4G(移动、电信、联通全网通)双线自动联网和检测功能,300M双天线无线WIFI,H.264编码格式,主、子码流可独立配置。
标配一路高清HDMI接口和VGA接口,丰富的输入输出接口,提供个性化需求定制。
支持1080P/720PUXGA等高清分辨率编码。
支持多用户、多平台(手机、平板、PC、大屏幕)同时接收指挥,超低延时,系统延时≤800m。
才用PP合金材料,防水防尘防震,耐高温,防护级别达到IP67.。
●应用场景:主要应用于无人机(安保、救灾、抢险、森林防火)、三防应急通讯、广电转播/直播、野战部队单兵侦察、应急指挥、反恐、消防指挥车与侦察员及指挥中心的实时图像传输,边防缉私、海事、海防等领域的海上高质量图像实时监控,实时新闻采集/赛事转播无线移动摄像车载,直升机、飞艇的空中侦察、监控等方面的无线视频传输。
●功能特点:*H.264编码格式,主、子码流可独立配置编码方式;*一路HDMI高清多媒体接口或一路VGA接口视频输入,支持一路VGA环通输出;*支持1080P、720P、UXGA等高清分辨率编码;*支持图像叠加前端视频信号源的分辨率;*支持VGA画面位置调整,支持画面区域剪裁功能;*支持双向语音对讲功能;*支持一键恢复默认配置;*支持最大128GB的microSD存储卡;*支持标准NFS、iSCS网络协议,实现NAS/IPSAN网络存储;*支持UPNP、DHCP,网络配置简单易用;*支持HTTPS加密与密码保护,保障网络应用安全可靠;*支持IE、FireFox、Chrome、Safari等多浏览器跨平台访问;*支持软件集成的开放式API,支持标准ONVIF协议;●技术参数:。
无线遥控车原理

无线遥控车原理
无线遥控车的原理是通过无线电波进行通信和控制。
它通常由遥控器和车辆两部分组成。
遥控器是用来发送控制信号的设备,它含有一个或多个按键,每个按键对应车辆的一个动作,如前进、后退、转弯等。
当按下某个按键时,遥控器会发送一个特定的信号。
车辆端包含一个接收器,用来接收来自遥控器的信号。
接收器将解码接收到的信号,并将其转换为相应的控制信号。
这些控制信号会送往车辆的电路系统,从而实现车辆的动作控制。
无线遥控车的通信过程是通过无线电波完成的。
遥控器和车辆之间建立一个无线信道,遥控器将控制信号转换为无线电波,并通过天线发送出去。
车辆的接收器上的天线接收到无线电波后,将其转换为电信号,并传送到电路系统中进行解码和处理。
在实际中,无线遥控车常使用射频(RF)技术或红外线(IR)技术进行通信。
射频技术使用无线电频段进行通信,信号传输距离较远,但可能受到干扰。
红外线技术使用红外光进行通信,信号传输距离较短,但相对稳定。
无论使用哪种技术,都需要遥控器和车辆之间配对,以确保只有特定的遥控器才能控制车辆。
总的来说,无线遥控车的原理是通过无线电波进行通信和控制。
遥控器发送控制信号,车辆接收并解码信号,并实现相应的动作控制。
国内外比较好的几款飞控系统介绍和性能配置
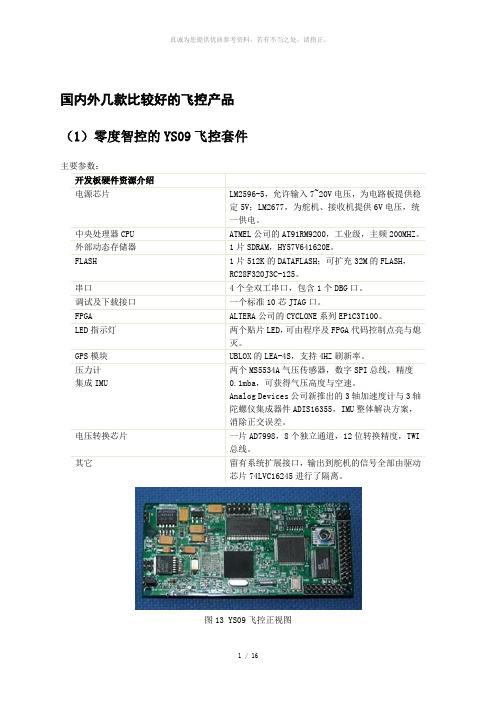
国内外几款比较好的飞控产品(1)零度智控的YS09飞控套件主要参数:开发板硬件资源介绍电源芯片LM2596-5,允许输入7~20V电压,为电路板提供稳定5V;LM2677,为舵机、接收机提供6V电压,统一供电。
中央处理器CPU ATMEL公司的AT91RM9200,工业级,主频200MHZ。
外部动态存储器1片SDRAM,HY57V641620E。
FLASH 1片512K的DATAFLASH;可扩充32M的FLASH,RC28F320J3C-125。
串口4个全双工串口,包含1个DBG口。
调试及下载接口一个标准10芯JTAG口。
FPGA ALTERA公司的CYCLONE系列EP1C3T100。
LED指示灯两个贴片LED,可由程序及FPGA代码控制点亮与熄灭。
GPS模块UBLOX的LEA-4S,支持4HZ刷新率。
压力计集成IMU 两个MS5534A气压传感器,数字SPI总线,精度0.1mba,可获得气压高度与空速。
Analog Devices公司新推出的3轴加速度计与3轴陀螺仪集成器件ADIS16355,IMU整体解决方案,消除正交误差。
电压转换芯片一片AD7998,8个独立通道,12位转换精度,TWI总线。
其它留有系统扩展接口,输出到舵机的信号全部由驱动芯片74LVC16245进行了隔离。
图13 YS09飞控正视图图14 YS09飞控后视图(2)北京普洛特无人飞行器科技有限公司的UP30/40飞控系统UP30性能参数:集成3轴MEMS加速度计、速率陀螺,GPS,空速传感器,及更高精度的全数字气压高度计供电范围扩展为4~26V,很多电动飞机的动力电可以直接给其供电体积相对UP20更小巧,仅为40X100X12mm3,重量26g外部接口和任务功能灵活且可以定制可内置3轴电子罗盘,支持3轴云台控制具备GPS/INS惯性导航功能,满足在丢星情况下返回起飞点舵机扩展到10~24个,分别可以执行飞行控制和其他任务支持国产低速通讯电台(最低波特率至1200bps),使得通讯距离更远、更可靠、误码率更低 2~6个10位AD,1路16位AD,充分满足任务数据采集需求大气数据探测能力,可以观测大气温压湿,以及风向风速具备UP20所具备的定时定距以及定点的航拍功能具备2路转速监测,特别适合于双发动机的无人机、无人飞艇的转速监测新的电气停车功能支持除了原来的磁电机发动机(如小松系列),还支持CDI点火的发动机(如3w等)支持全自动伞降;可连接超声波高度传感器实现全自动的滑跑降落,只需要在地面站上指定降落点与方向以及左右盘旋,飞控自动推算下滑航线。
新手入门之 Wifi Robot无线远程智能遥控小车
新手入门之Wifi Robot无线远程智能遥控小车您正在看的文章来自爱果联盟,原文地址:/read.php?tid=222 一:什么是Wifi Robot无线远程智能遥控小车?Wifi Robot无线远程智能遥控小车就是利用非常成熟的WIFI无线网络为数据载体,实现控制数据,音视频双向数据交换而达到控制小车和视频监控等等功能。
二:Wifi Robot无线远程智能遥控小车有什么功能?Wifi Robot无线远程智能遥控小车是集无线通讯、实时四驱、多向机械云台、视频监控、电器红外遥控、环境温度检测、为一体的多功能智能遥控车。
使用使用ATMEGA16L单片机作为数据处理中心,将电脑、手机端的控制数据经过路由器/btplug转换转换成串口数据,ATMEGA16L再将路由器发送来的串口数据进行分配来控制4个车轮的工作状态模式和三个陀机的工作角度A TMEGA16L还负责实时监控环境温度并经过路由器/btplug反馈至电脑,让使用者可以实时了解小车所在地的气温便于在到达目的地之前设定好空调温度等应用。
三:Wifi Robot无线远程智能遥控小车用在什么地方?怎么玩?Wifi Robot无线远程智能遥控小车可以放在公司作为产品演示的高级智能助手,帮你递送文件,帮你拿听百威,帮你拿盒万宝路,又或者向你的客户打声招呼。
Wifi Robot无线远程智能遥控小车可以放在家里当做一贴切保姆,你可以在公司用电脑监控家里的的一切动态,可以在车上就设定好家里空调温度,可以定时电视机在什么时候换什么台,这一切你只需要连接到ITELNET。
Wifi Robot无线远程智能遥控小车也是广场上的明星,你带着他在城市广场上炫耀,玩耍,让它拿个小礼物送心仪的MM,让他帮你丢垃圾,这一切都不是问题。
四:Wifi Robot无线远程智能遥控小车从哪里买得到?Wifi Robot无线远程智能遥控小车不会以成品方式出售,Wifi Robot无线远程智能遥控小车其实是我们全国各地广大爱好者组织开发的一款DIY车,我们只提供了驱动板部分路由器和车架这些都是大家团购再回来组装的,所有每个人DIY出来的车车可能都不一样,可谓风情万种。
智慧机场整体解决方案 - 公开V1.0
03 金祺创智慧机场平台组成
智慧机场硬件平台
云平台
智慧机场APP
All in one 智慧盒子
智慧机场管理平台 光纤汇聚设备
机场数据服务中心 机场智能服务平台
全光纤
1:N 分光器
智慧盒子 Internet 智能化平台
数字安防
数字监控 红外报警 烟雾报警 信红息外发报布警系统
烟雾报警
吸顶音箱 LED信息发布 广播中心 设备管理 定时开关灯
智能行为分析 包含“聚众、打架、异常奔跑”等 数据分析,进一步保证机场的安全
复合视频监控系统 复用已有的视频监控系统,无需独 立架设,大大为用户节约了成本。
智慧运营—机场无线地勤智能调度系统
机场地勤服务资源分析
机场地勤服务正面临的挑战
智慧运营—机场智能应急指挥调度系统
l 地图管理 l 应急事件管理 l 预案管理 l 历史案件管理
公 司 资 质
前言
前言
智慧机场是在数字机场的基础上,高度集成新一代信息技 术包括信息感知、传输、处理各个环节,并运用近距离无 线通讯、传感网、海量数据存储、数据挖掘、云计算、信 息安全等关键技术,建立功能更加完善、更加安全高效的 机场。实现多网融合,拥有更透彻的感知、更全面的互联 互通、更有效的交换共享、更协作的关联应用,最终形成 一个智慧安全、智慧运营、智慧营销、智慧服务的安全、 绿色、智慧的机场。
模块化解决方案
金祺创为客户提供完整的解 决方案;同时也是模块化可 拼接的解决方案;既可以全 部拼接成无缝的整体;各模 块也可独立提供服务;一切 循客户所需;依托而不依赖。
工业智能化
金祺创为助力企业向工业 4.0迈进,在传统自动控制 的基础上融入云计算、大数 据和物联网等先进技术,从 而减少失误、规避风险、提 高效率、节约能源、减少污 染、降低成本。
表二第一批大学生创新性实验计划立项高校学生项目情况
排 学 序 院
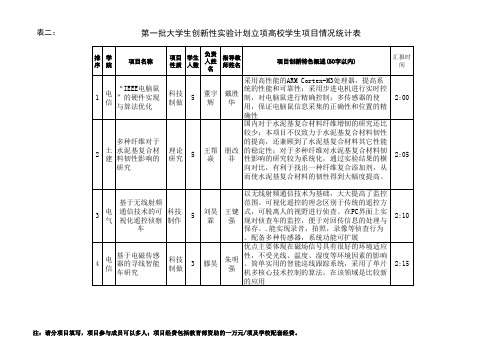
第一批大学生创新性实验计划立项高校学生项目情况统计表
项目 学生 负责人 指导教 性质 人数 姓名 师姓名 汇报时 间
项目名称
项目创新特色概述(50字以内) 项目创新特色概述(50字以内) 字以内
“IEEE电脑鼠 电 1 ”的硬件实现 信 与算法优化
科技 制做
5
多种纤维对于 土 水泥2:05
基于无线射频 电 通信技术的可 科技 3 气 视化遥控侦察 制作 车
5
2:10
基于电磁传感 电 4 器的寻线智能 信 车研究
科技 制做
3
2:15
5
混凝土/岩石临 土 理论 界损伤判断的 建 研究 声发射研究
5
2:20
注:请分项目填写,项目参与成员可以多人;项目经费包括教育部资助的一万元/项及学校配套经费。 请分项目填写,项目参与成员可以多人;项目经费包括教育部资助的一万元/项及学校配套经费。
表二:
排 学 序 院
第一批大学生创新性实验计划立项高校学生项目情况统计表
项目 学生 负责人 指导教 性质 人数 姓名 师姓名 汇报时 间
项目名称
项目创新特色概述(50字以内) 项目创新特色概述(50字以内) 字以内
电 智能电梯控制 科技 6 气 系统 制作
4
7
基于CCD传感器 电 科技 的智能车设计 信 制做 与制作
3:50
3:55
4:00
注:请分项目填写,项目参与成员可以多人;项目经费包括教育部资助的一万元/项及学校配套经费。 请分项目填写,项目参与成员可以多人;项目经费包括教育部资助的一万元/项及学校配套经费。
项目名称
项目创新特色概述(50字以内) 项目创新特色概述(50字以内) 字以内
行车遥控器适用范围_无线行车遥控器的优势
()行车遥控器适用范围_无线行车遥控器的优势关键词速读:工业遥控器_无线遥控器_工业无线遥控器_工业遥控器价格_工业遥控器厂家_架桥机遥控器_工业门遥控器_天车遥控器_行车遥控器_绞盘遥控器_穿梭车遥控器_起重机遥控器Tele Radio工业无线遥控系统60多年的专业经验知识积累创新历程泰瑞信(厦门)工业科技有限公司,自2016年8月始,承继“泰瑞通(厦门)电子有限公司”(成立于2007年)之销售业务,办公和物流中心设于中国•厦门市,由Tele Radio的亚洲区子公司“泰瑞亚洲(香港)有限公司”设立,全面负责Tele Radio在大中华区的市场。
Tele Radio专业于开发、制造、销售工业用无线遥控系统,1955年成立于瑞典Lysekil(吕瑟希尔),现已成长为一个全球性的企业集()团- Tele Radio Group。
公司总部坐落在瑞典Gothenburg(哥德堡)的Askim(阿希姆),在欧洲、美洲、亚洲等拥有多家分公司,经销商与合作伙伴遍及世界各地。
Tele Radio产品的研发都是独立完成,60多年的经验历程,使我们积累了扎实的知识和经验。
我们的使命是:只要有达到您需求的任何可能性,就“永不说不”;我们的目标是:为您的特殊应用提供最优异的无线遥控系统。
为达到这些目标,全体员工都积极地成为创新过程的一部分,并承担起各自工作领域的责任.什么是无线射频技术?无线射频遥控器都有哪些优势?射频技术的遥控距离也远大于一般的红外遥控距离(数米到十米)。
在同样的操控条件下,射频遥控的距离可以轻松达到数十米。
根据不同应用需求,可以通过加大射频输出功率来进一步延长遥控距离。
无线射频遥控器的优点是其范围:它们可以传输的距离为距接收器长达30米(蓝牙的传输距离要短一些),无线信号可以穿越墙壁。
正因为有以上优点,你才会到处寻找家庭影院组件的红外/射频遥控器。
无线射频遥控器传输距离远,信号强,具有红外对射等功.()如果你的设备控制点数量四个及以下,工业遥控器,四个按键控制四个继电器,另加启动和蘑菇头急停,按键程序可以设置成点动模式,也可以设置成自锁模式,按键表面文字可以根据客户要求制作。
微波车辆检测器产品手册介绍

14) 可转接以太网、光缆或无线(GPRS、CDMA) ; 15) 波特率: 5 环境与可靠性指标 1) 全天候工作: 2) 温度范围: 3) 防护措施: 4) 外壳指标: 5) 可靠性: 设备可在各种恶劣气候下工作; -45℃-+85℃; 设备在电源供电、串口通信等方面采取了防雷措施; 全面超越 IP65 设计; 平均无故障间隔时间 90000 小时 2400-115200bps 可调;
2
图2 本设备采用可视化的软件界面,设置不同的上报时间,设备根据用户设 置的时间参数,将各种交通流参数信息通过数据通道传输到指挥控制中心。 本设备可靠高效,具备多目标检测能力,包括从摩托车到多轴、高车身的车 辆;并采用先进的算法,对拖车进行高精度检测,避免了同类产品中出现的将拖 车误报为多辆车型的缺点,可检测路上每一车道所通过的车流量、车辆速度、车 道占有率、车型分类等参数。 2 产品主要特点 1) 采用国外微波探测领域最新技术,结合国内交通实际状况,设计出的真 正符合国内交通规律的探测器; 2) 采用中心频率为 24GHZ 的微波信号; 3) 产品检测不受绿化带、交通护栏及其他障碍物的影响,可以检测到被遮 挡的目标车辆。 4) 具有很强的抗干扰性能,由于微波对环境干扰不敏感,可以在雨、雪、 雾霾、沙尘暴等各种恶劣气象条件下进行准确的检测,解决了视频、线 圈等传统手段无法弥补的难题; 5) 采用国外最新的微波检测技术,结合高性能的 DSP 平台,可以满足目前 国内城市交通中出现的各种车型混合上路的交通状况,采用新型算法, 可以准确的检测并分辨各个车道的车辆信息,车流量的检测率高达 98%。 6) 自适应划分车道,由于采用的是线性调频技术,通过算法处理,距离分 辨率高达 0.3 米,可以解决车道识别问题。因此本设备可以在不同地形
无线遥控车原理

无线遥控车原理无线遥控车是一种受到很多人喜爱的玩具,它能够通过无线遥控器来实现前进、后退、转向等动作。
那么,无线遥控车是如何实现这些动作的呢?接下来,我们将深入探讨无线遥控车的原理。
首先,无线遥控车的核心是无线遥控模块。
这个模块通常由接收器和发射器两部分组成。
发射器通过按键来发送指令,接收器则接收并解码这些指令,然后控制车辆的电机进行相应的动作。
这种无线遥控模块通常采用射频技术,能够实现远距离的控制。
其次,无线遥控车的动力系统主要由电机、电池和驱动电路组成。
电池为无线遥控车提供电能,电机则是将电能转化为机械能,驱动车辆前进、后退和转向。
而驱动电路则负责控制电机的工作状态,根据接收到的指令来控制电机的转速和方向。
此外,无线遥控车还配备了传感器系统。
传感器可以感知车辆周围的环境,例如红外传感器可以感知障碍物,从而避免碰撞;光电传感器可以感知光线强弱,根据环境光线来调整车辆的行驶速度和方向。
这些传感器能够使无线遥控车更加智能化,提高其安全性和可玩性。
最后,无线遥控车的控制算法也是实现其动作的重要部分。
控制算法可以根据接收到的指令和传感器的反馈信息,实时调整电机的输出功率和转向角度,从而使车辆能够平稳、灵活地行驶。
通过不断优化算法,可以使无线遥控车具有更好的控制性能和用户体验。
总的来说,无线遥控车的原理主要包括无线遥控模块、动力系统、传感器系统和控制算法。
这些部件相互配合,共同实现了无线遥控车的各种动作。
通过深入了解无线遥控车的原理,我们可以更好地理解其工作原理,为日后的制作和改进提供参考。
希望本文能够对您有所帮助,谢谢阅读!。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
西安电子科技大学
届“星火杯”大学生课外学术科技作品竞赛
科技发明制作类说明
作品名称:
基于无线射频通信技术的可视化遥控侦察车
作品类别:
科技发明制作类
作品编号:
作品功能简介及使用说明书
基于无线射频通信技术的可视化遥控侦察车作品简介:
硬件部分
安装无线摄像头,实现可视化遥控,户外传输距离理论值可达到100 米。
使用电脑进行可视化遥控,探测车可脱离人的视野执行侦察任务。
配有红外传感器,探测车可实现自动避障,循迹。
可遥控打开探照灯,进行黑暗条件下工作。
采用履带式底盘,双直流电机,具有一定的越野能力。
系统可扩展,增加传感器后可实现多种信号的采集回传。
软件部分 自主开发的操控软件(软件用 C#语言编写)
界面上显示小车回传图像,并有各种功能按钮。
在此软件中可用电脑键盘控制小车的行走并完成相应动作, 可根据传回的音频,视
频信号,实现窃听,拍照,录制。
操作说明:
在电脑上打开软件平台,打开串口,实现电脑与收发器间的通信。
打开小车开关,实现收发器与小车通信.
在软件平台上,使用键盘的 W A S D 键控制行进的方向,
1
口 号
按p 键可打开探照灯。
按照软件界面上的提示可拍照,或录制声音,录制图像。
也可以用手持遥控器进行遥控。
遥控器配有大功率发射模块。
系统简介:
PC—串口)收发器—《—(射频模块)—小车控制系统PC :与收发器进行串口通信。
通过操控软件发送指令,并显示小车回传的数据。
收发器:以STC 单片机为核心,配有24l01 无线数传模块。
收发器与电脑进行串口通信,接收电脑的指令代码,然后将指令代码通过数传模块传递给小车。
同时收发器能接收小车回传的信号,将小车的状态传递给电脑。
小车控制系统 :控制系统以STC 单片机为核心,通过数传模块与收发器进行双向通信,接收并执行指令,同时向收发器回传数据。
控制系统组件:
STC 单片机最小系统板
LCD 液晶屏幕无线模块插接板继电器板直流电机驱动板红外传感器
动力部分: 两个直流电机齿轮组履带
电源部分 :
4.8V 充电电池包 为电机供电 ,为探照灯供电 9V 电池 经稳压后为单片机系统供电
9V 电池 为继电器供电,为摄像头供电 无线模块,传感器,液晶屏幕等从单片机系统取电
无线模块特性简介 :
(1) 2.4Ghz 全球开放 ISM 频段免许可证使用
(2) 最高工作速率 2Mbps ,高效 GFSK 调制, 适合工业控制场合
(3) 126 频道,满足多点通信和跳频通信需要
(4) 内置硬件 CRC 检错和点对多点通信地址控制
(5) 低功耗 1.9 - 3.6V 工作,待机模式下状态为 式下
为 900nA (6) 内置 2.4Ghz 天线,体积小巧 15 mm X 22 mm (7) 模块可软件设地址,只有收到本机地址时才会输出数据(提 供中断指示 ) ,可直接接各种单片机使用,软件编程非常方便
无线摄像头参数 :
图像感应 (Imaging Sensor) 1/3 寸彩色 CMOS
总像数 (Total Pixels) 628 x 582 (PAL)/510 x 492 (NTSC)
调制类型 (Modulation Type) FM
带宽 (Bandwidth) 18MHz
抗干扰能力强,特别
22uA ;掉电模
}
无障碍距离 (Unobstructed Effective Range(Min.)) 100
小车控制系统单片机部分代码: 上位机:
main()
uchar temp_serial[7]={'*','0','0','0','0','0','#'}; uchar CommendFromSerial;
InitSerial();
SetP0down();
T0_valueSet();
//主循环
while(1){
//检测执行按键
if(P33==0) // 电平升
if(X<99) X++;
if(P34==0) // 电平降
if(X>1) X--;
供电电源 (Power
Supply)
+8V DC
米(M )
如有你有帮助,请购买下载,谢谢!//检测执行串口命令if(RI==1){
RI=0;
CommendFromSerial=SBUF;
if(CommendFromSerial=='+'){
if(X<10)X=X+1;
if(CommendFromSerial=='-'){
if(X>1)X=X-1;
if(CommendFromSerial=='w'){
SetP0down();
P00=1;
if(CommendFromSerial=='a'){
SetP0down();
P01=1;
if(CommendFromSerial=='d'){
SetP0down();
P02=1;
}
如有你有帮助,请购买下载,谢谢!
if(CommendFromSerial=='s'){
SetP0down();
P03=1;
if(CommendFromSerial=='p'){
SetP0down();
P01=1;
P02=1;
//刷新状态字符串
temp_serial[1]=mun_char_table[X/10];
temp_serial[2]=mun_char_table[X%10];
temp_serial[3]=mun_char_table[P37==0];
temp_serial[4]=mun_char_table[P10==0];
temp_serial[5]=mun_char_table[P11==0];
//发送状态字符串for(i=0;i<7;i++){
SBUF=temp_serial[i];
while(TI==0);
delay(200);
SetP0down();
TI=0;
}
如有你有帮助,请购买下载,谢谢!下位机:
void main()
lcd_system_reset(); /*LCD1602 初始化*/
for(i=0;i<16;i++) lcd_char_write(i,0,line[i]);
for(i=0;i<16;i++) lcd_char_write(i,1,line2[i]);
Stop();
while(1){
lcd_char_write(1,1,mun_to_char[P30]);
lcd_char_write(2,1,mun_to_char[P31]);
lcd_char_write(3,1,mun_to_char[P32]);
lcd_char_write(4,1,mun_to_char[P33]);
lcd_char_write(7,1,mun_to_char[P10]);
lcd_char_write(8,1,mun_to_char[P13]);
Control();
Evade();
delay(4);
}
如有你有帮助,请购买下载,谢谢!
由于时间关系,部分功能还不够完善,正在不断改进之中
2009 年11 月。