ABB机器人io介绍
ABB机器人IO信号配置介绍
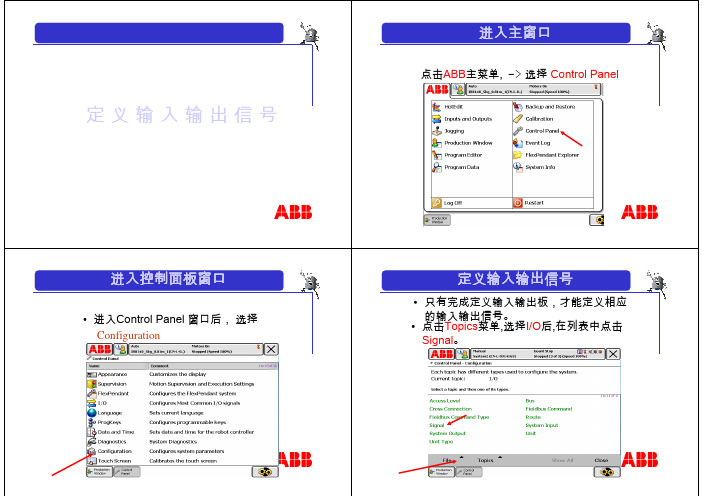
进入主窗口点击ABB主菜单, -> 选择 Control Panel定义输入输出信号进入控制面板窗口• 进入Control Panel 窗口后, 选择 Configuration定义输入输出信号• 只有完成定义输入输出板,才能定义相应 的输入输出信号。
• 点击Topics菜单,选择I/O后,在列表中点击 Signal。
定义输入输出信号• 点击Add, 增加输入输出信号。
定义输入输出信号• Name-信号名称。
按住Name进入文本编辑窗口,定义输入输 出信号名称,在系统内名称不允许重复, 第一位必须为字母,最长 16 位字符。
定义输入输出信号• Type of signal-输入输出信号的类型。
按住Type of signal, 在出现的列表中选择相 应的信号类型。
定义输入输出信号• Assigned to unit-分配输入输出板。
按住Assigned to unit,在列表中选择相应的 输入输出板。
定义输入输出信号• Unit mapping -映射物理端口。
按住该选项,进入输入窗口输入相应的映射 端口号.与输入输出板的特性相关。
定义输入输出信号• Access level 按住Access level,在列表中选择相应的 Access level 。
定义数字输入信号-DI 及GI• Filter time passive-低电平保持时间。
按住该选项进入输入窗口,输入相应值。
在机器人运动前,输入值 0 必须保持相应 时间,单位毫秒,最小 10毫秒 ( 默认 ),最 大 32 秒。
定义数字输入信号-DI 及GI• Filter time active-高电平保持时间。
按住该选项进入输入窗口,输入相应值。
在机器人运动前,输入值 1 必须保持相应 时间,单位毫秒,最小 10毫秒 ( 默认 ),最 大 32 秒。
定义数字输入信号-DI 及GI• Invert physical value -信号倒置。
ABB机器人IO配置一

04
对数据传输进行实时监 控和故障诊断,及时发 现并解决数据传输过程 中的问题。
05
安全防护与操作规范
电气安全防护措施
使用符合规格的电缆和连接器
隔离电气部件
确保电缆和连接器能够承受所需的电流和电 压,并具有足够的机械强度。
将电气部件与操作人员隔离,使用防护罩、 绝缘材料等。
定期检查电气系统
遵守静电防护规范
IO配置可以用于机器人程序的控制,例如通过输入信号触 发机器人程序的执行,或者通过输出信号控制外部设备的 动作。
安全保护 IO配置还可以用于机器人的安全保护,例如通过配置安全 门信号,确保机器人在安全门关闭时停止运行,从而保障 操作人员的安全。
基本概念和术语
信号类型
指输入输出信号的种类,如数字 信号、模拟信号等。
信号地址
指输入输出信号在机器人系统中 的唯一标识,用于区分不同的信 号。
信号参数
指输入输出信号的参数设置,如 信号的电平、频率等。
IO板卡
指机器人系统中用于处理输入输 出信号的硬件设备,通常具有多
个输入输出通道。
02
硬件连接与接口
机器人控制器接口类型
01
02
03
标准I/O接口
包括DeviceNet、 Profibus、Profinet、 EtherNet/IP等,用于与 外部设备进行通信。
无线连接
采用无线通信技术连接外 部设备,适用于移动机器 人等场景。
电缆选择与布线规范
电缆类型选择
根据传输信号类型、距离和环境条件 选择合适的电缆,如屏蔽电缆、双绞 线等。
布线规范
电磁兼容性考虑
在布线过程中考虑电磁兼容性问题, 避免干扰和噪声对信号传输的影响。
abb机器人的硬件连接和IO通信

06
实际应用案例
机器人控制器应用案例
案例名称
汽车制造生产线上的装配机器人
描述
在汽车制造生产线上,装配机器人通过控制器进行精确控制,实现自动化装配作业。控制器通过IO通 信与生产线上的传感器和执行器进行数据交互,确保装配过程的准确性和高效性。
机器人本体应用案例
案例名称
码垛机器人应用于物流仓库
描述
机器人本体故障排查
关节不动作
检查关节电机是否正常,电机连接线 是否牢固,关节限位开关是否正常。
本体振动过大
检查本体平衡情况,本体电机温度, 本体减速器润滑情况。
周边设备故障排查
传感器不工作
检查传感器电源是否正常,传感器连接线是否牢固,传感器是否损坏。
IO模块通信问题
检查IO模块连接线是否牢固,IO模块的地址设置是否正确,IO模块的电源是否正常。
详细描述
网络IO通信使用网络电缆或无线网络进行数据传输,可以实现远程控制和监控。 网络IO通信具有传输距离远、可扩展性强等优点,但需要配置网络设备和设置网 络参数。
04
硬件故障排查
控制器故障排查
控制器启动问题
检查控制器电源是否正常,控制器连 接是否牢固,控制器的启动按钮是否 正常。
控制器死机
重启控制器,检查控制器的固件版本 是否最新,检查控制器的散热情况。
码垛机器人用于物流仓库中的货物码垛作业。通过机器人的本体运动,实现货物的快速 搬运和堆叠。IO通信用于机器人与外部设备的交互,如获取货物位置信息、控制货叉
升降等。
周边设备应用案例
案例名称
喷涂机器人应用于汽车表面喷涂
VS
描述
喷涂机器人用于汽车表面的自动喷涂作业 。除了机器人控制器外,还需要配置喷枪 、供料器、涂料回收装置等周边设备。IO 通信用于机器人与周边设备的协同工作, 实现精确的涂料流量控制和喷涂轨迹跟踪 。
ABB机器人仿真IO设置

ABB机器人怎么设置I/O板
步骤:1、ABB---控制面板----选择主题I/O分配 然后分为3小步:
① Unit--添加---Name----motors1( 自定义名字) 定义I/O
Type of Unit------d651----确认
Connected to Bus -----Devicevet----确认
DeviceNET Address ----63---确认(此处为地址,每一个I/O的地址不能相同)
② Signal---添加-- Name ---Di1(自定义名字) 定义哪块电路板
Type of signal ---Digital Input (可更改)
Assigned to unit---- motors1(步骤①中定义的名字)
疑问:加入信号后,在手动的时候程序可以正常执行,但在自动的时候 会提示《I/O处理错误 当前操作模式下不允许该动作,检查信号访问级别。》这是为嘛呢?
据说可以在示教器里设置允许模拟
需要更改程序类型
Unit mapping ----1(一般定义为1)
③ System Input --添加---Signal Name 值(选择步骤②中定义的名字)
Action-- 选择所需要执行的指令
注意:在程序中使用以上I/O指令时,I/O地址 需更改数据类型为 signaldi(信号) 。
abb机器人的硬件连接和io通信完整课件

abb机器人的硬件连接和io通信完整课件目录•机器人硬件连接概述•IO通信原理及协议•机器人硬件连接详解•IO通信实现方法•故障诊断与排除技巧•案例分析与实践操作演示01机器人硬件连接概述控制器电机与驱动器传感器执行器机器人硬件组成01020304机器人的“大脑”,负责处理各种传感器输入和执行器输出。
提供机器人运动所需的动力,驱动器将控制器的信号转换为电机可理解的指令。
感知机器人周围环境,将环境信息转换为电信号传递给控制器。
根据控制器指令执行特定动作或任务的装置,如机械臂、夹爪等。
通过电缆将各硬件组件连接起来,稳定可靠但灵活性较差。
有线连接无线连接接口类型采用蓝牙、Wi-Fi 等无线通信技术,提高灵活性但可能增加信号干扰和延迟。
包括USB 、Ethernet 、CAN 等,不同接口适用于不同通信需求和场景。
030201连接方式及接口硬件配置与选型01根据机器人应用场景和需求选择合适的控制器、电机、传感器和执行器等硬件。
02考虑硬件之间的兼容性和通信协议,确保各组件能够协同工作。
03对于特殊需求,可能需要定制或改造现有硬件以满足特定功能或性能要求。
02IO通信原理及协议IO通信基本概念输入/输出(I/O)通信指机器人与外部设备之间的数据传输,包括数字信号和模拟信号的传输。
通信接口机器人与外部设备连接的物理接口,如RS232、RS485、Ethernet等。
通信协议规定机器人与外部设备之间数据传输的格式和规则。
一种串行通信协议,广泛应用于工业自动化领域,支持多种物理接口。
Modbus 协议Profinet 协议EtherCAT 协议OPC UA 协议一种基于Ethernet 的工业自动化通信协议,具有高带宽、实时性强的特点。
一种实时以太网通信协议,具有高精度同步和低延迟特性,适用于高性能机器人控制。
一种跨平台的工业自动化通信协议,支持信息建模和统一架构,适用于复杂系统的集成。
常见IO 通信协议根据实际需求选择合适的通信协议,考虑因素包括传输速度、实时性、可靠性、兼容性等。
ABB机器人的IO通信

经过调研和评估,选择了ABB机器人 作为自动化改造的核心设备,因其具 有高精度、高稳定性和易编程等优点 。
IO通信方案设计思路阐述
针对生产线的实际需求,设计了 基于Profinet协议的IO通信方案 ,实现了机器人与PLC、传感器 、执行器等设备的实时数据交互
。
通过配置机器人的IO信号,实现 了对外部设备的精确控制,包括
04
网络通信技术在ABB机器人中 应用
Chapter
常见网络通信技术简介
01
Ethernet/IP
一种基于以太网的工 业通信协议,广泛应 用于自动化领域。
02
Profinet
由Profibus国际组织 推出的实时以太网标 准,适用于工业自动 化领域。
03
DeviceNet
基于CAN总线的工业 通信网络,适用于设 备级通信。
积极参加行业内的技术交流和培训活动,了解最新的技 术动态和发展趋势。
关注网络安全问题,学习相关的安全防护和漏洞修复技 术。
THANKS
感谢观看
建立完善的安全管理制度
制定完善的安全管理制度和操作流程 ,加强人员培训和管理,提高整体的 安全防护能力。
05
实际应用案例分析与讨论
Chapter
生产线自动化改造项目背景介绍
原有生产线存在效率低下、人工成本 高的问题,急需进行自动化改造以提 升生产效益。
生产线需要实现多种零部件的组装、 涂胶、检测等工艺,要求机器人能够 与各种外部设备进行IO通信,实现自 动化协同作业。
将程序划分为多个模块,每个 模块实现特定的功能。这样可 以提高程序的可读性和可维护 性,同时方便进行程序的扩展 和优化。
针对具体的应用场景和需求, 选择合适的算法和数据结构进 行优化。例如,可以采用高效 的数据处理算法和存储结构来 提高程序的运行效率。
第6次课 机器人IO板配置

ABB机器人的I/O通信§3 ABB机器人I/O板—DSQC651板配置●实训目的要求1、了解ABB机器人信号的种类2、掌握ABB机器人数字输入信号、数字输出信号、组输入信号、组输出信号和模拟输出信号3、掌握ABB机器人信号配置●实训重点难点1、掌握ABB机器人数字输入信号、数字输出信号、组输入信号、组输出信号和模拟输出信号2、掌握ABB机器人信号配置教学内容组织与过程设计备注引入:(约5min)教学内容:ABB标准I/O板DSQC651是最为常用的模块,下面以创建数字输入信号di、数字输出信号do、组输入信号gi、组输出信号go和模拟输出信号ao为例做一个详细的讲解。
一、定义DSQC651板的总线连接ABB标准I/O板都是下挂在DeviceNet现场总线下的设备,通过X5端口与DeviceNet现场总线进行通信。
定义DSQC651板的总线连接的相关参数说明见表3-16。
其总线连接操作步骤如下:二、定义数字输入信号dil数字输入信号dil的相关参数见表3-17 其操作如下:三、定义数字输出信号dol数字输出信号dol的相关参数见表3-18。
其操作如下:四、定义组输入信号gil组输入信号gil的相关参数及状态见表3-19、表3-20。
组输入信号就是将几个数字输入信号组合起来使用,用于接收外围设备输入的BCD编码十进制数。
此例中,gil占用地址1~4共4位,可以代表十进制数0~15。
如此类推,如果占用地址5位的话,可以代表十进制数0~31。
五、定义组输出信号gol组输出信号gol的相关参数及状态见表3-21、表3-22。
其操作步骤如下:六、定义模拟输出信号aol模拟输出信号aol的相关参数见表3-23。
其操作如下:七、实训总结八、场地清洁组织学生打扫卫生,保持实训室整洁、干净;为下次实训课提供一个良好的环境。
课堂小结写实训报告实训作业教学后记。
项目一-ABB机器人IO板配置(一)

主要内容
• ABB机器人标准I/O板——DSQC651板的配置。 • 定义DSQC651板的总线连接。 • 定义数字输入信号di1。
定义DSQC651板的总线连接
ABB标准I/O板都是下挂在DeviceNet现场总线下的设备,通过X5端口与 DeviceNet现场总线进行通信。定义DSQC651板总线连接的相关参数,如表所示:
定义数字输入信号di1
定义数字输入信号di1的操作步骤:
⑤要对新添加的信号 进行参数设置,要双 击参数进行修改,首
先双击“Name”。
⑥输入“di1”, 然后单击“确定”。
⑦然后双击 “Type of Signal”,
选择“Digital Input”。
⑧接下来双击 “Assigned to Device”,选择
总线连接操作步骤:
⑧单击“确定”,返 回参数设定界面。
⑨参数设定完毕,单击 “确定”。
⑩弹出重新启动界面, 单击“是”,重新启动 控制系统,确定更改。
定义数字输入信号di1
数字输入信号di1的相关参数,如表所示:
参数名称 Name Type of Signal Assigned to Unit Unit Mapping
设定值 Board10 Digital Input Board10
0
说明 设定数字输入信号的名字 设定信号的种类 设定信号所在的I/O模块 设定信号所占用的地址
定义数字输入信号di1
定义数字输入信号di1的操作步骤:
①单击“控制面 板”。
②选择“配置”。
③双击“Signal” 项。
④进入到如图所 示界面,单击 “添加”。
总线连接操作步骤:
ABB工业机器项目一-ABB机器人IO板配置(三)
定义组输入信号gi1
(7)双击“Type of signal”,然后选择 Group Input。
(8)双击“Assigned to Device”,然 后选择“d651”。
定义组输入信号gi1
(9)双击“Device Mapping”,输入 1-4,然后单击确定。
出信号go1
(1)进入ABB主菜单,选择“控制面 板”。
(2)单击配置选项。
定义组输出信号go1
(3)双击Signal。
(4)单击添加。
定义组输出信号go1
(5)双击Name。
(6)输入go1,然后单击确定。
定义组输出信号go1
(7)双击“Type of signal”,然后选择 Group Output。
ABB机器人IO板配置(三)
主要内容
• 定义组输入信号gi1。 • 定义组输出信号go1。
定义组输入信号gi1
组输入信号的相关参数,如表所示:
参数名称 Name
Type of Signal Assigned to Device
Device Mapping
设定值 gi1
Group Input d651 1~4
定义组输出信号go1
组输出信号go1的相关参数及状态,如表所示:
参数名称 Name
Type of Signal Assigned to Device
Device Mapping
设定值 go1
Group Output d651 33~36
说明 设定组输出信号的名字 设定信号的类型 设定信号所在的I/O模块 设定信号所占用的地址
说明 设定组输入信号的名字 设定信号的类型 设定信号所在的I/O模块 设定信号所占用的地址
ABB机器人的 IO通信
表4-2
使用定义 OUTPUT CH1 OUTPUT CH2 OUTPUT CH3 OUTPUT CH4 OUTPUT CH5 OUTPUT CH6 OUTPUT CH7 OUTPUT CH8 0V 24V
X3 端子编号 1 2 3 4 5 6 7 8 9 10
表4-3
使用定义 INPUT CH1 INPUT CH2 INPUT CH3 INPUT CH4 INPUT CH5 INPUT CH6 INPUT CH7 INPUT CH8 0V 未使用
© ABB April 23, 2020
| Slide 4
ABB机器人I/O通讯的种类 ABB机器人提供了丰富I/O通讯接口,如ABB 的标准通讯,与PLC的现场总线通讯,还有 与PC机的数据通讯,如图,可以轻松地实现 与周边设备的通信
© ABB April 23, 2020
| Slide 5
ABB的标准I/O板提供的常用信号处理有数字量输入,数字量输出, 组输入,组输出,模拟量输入,模拟量输出,在本章中会对此进行 介绍。 ABB机器人可以选配标准ABB的PLC,省去了原来与外部PLC进行通 信设置的麻烦,并且在机器人的示教器上就能实现与PLC的相关操 作。 在本章中,以最常用的ABB标准I/O板DSQC651和Profibus-DP为例, 对如何进行相关参数设定进行详细的讲解。
4.2. ABB标准IO板卡介绍
4.2.1 ABB标准I/O板 DSQC651
DSQC651板主要提供8个数字输入信号、8个 数字输出信号和2个模拟输出信号的处理。
a. 模
A 数字输出信号指示灯。
块
B X1数字输出接口。
接
C X6模拟输出接口。
口
D X5是DeviceNet接口。
【2024版】ABB工业机器人操作与编程课件第3章-工业机器人IO通信

说明 分布式 I/O 模块,di8、do8、ao2
分布式 I/O 模块,di8、do8 分布式 I/O 模块,di8、do8 带继电器
分布式 I/O 模块,ai4、ao4 输送链跟踪单元
二 ABB标准I/O 板
ABB标准I/O板在使用时需要设置相应的输入输出信号参数后才可以正常使用,需要设定的参数包括
使用定义 INPUTCH1 INPUT CH2 INPUT CH3 INPUT CH4 INPUT CH5 INPUT CH6 INPUT CH7 INPUT CH8
0V 未使用
地址分配 0 1 2 3 4 5 6 7
X6接口各引脚定义及地址分配表
X6 端子号 1 2 3 4 5 6
使用定义 未使用 未使用 未使用
模拟输出量 0V 模拟输出量 AO1 模拟输出量 AO2
地址分配
0~15 16~31
X6接口其内部电路如下图所示,方框内部为DSQ651板的接口电路电压输出范围为0~10V 。
DSQC651板X6接口电路图
X5接口为Device Net总线接口,是挂在DeviceNet网络上的,该端口用来设定模块在网络中的地址。 其接口上各引脚的定义见下表,其中,编号6~12的跳线用来决定该I/O模块在Device Net总线中的地址, 使用该模块时必须要设置地址,地址范围在10~63。
1 ABB标准I/O板DSQC651
DSQC651板主要提供8个数字量输入,8个数字量输出和2个模拟量输出信号的处理,如图所示,它 有X1、X3、X5、X6四个模块接口、模块状态指示灯、数字输入信号指示灯及数字输出信号指示灯。
X1 端子号 1 2 3 4 5 6 7 8 9 10
X1接口各引脚定义及地址分配表
ABB机器人控制柜各个部件介绍

ABB机器人控制柜各个部件介绍ABB 机器人控制柜是机器人系统的核心控制单元,就像人的大脑一样,负责指挥和协调机器人的各种动作和功能。
它由多个重要的部件组成,每个部件都发挥着不可或缺的作用。
下面,让我们来详细了解一下这些部件。
首先是电源模块。
这是为整个控制柜提供稳定电力供应的关键部件。
它将输入的电源进行转换和调节,以满足控制柜内其他部件所需的特定电压和电流要求。
电源模块的质量和稳定性直接影响着机器人系统的运行可靠性,如果电源出现问题,可能会导致机器人突然停机或者工作异常。
接下来是主计算机。
可以把它看作是控制柜的“大脑中枢”。
主计算机负责处理和运行机器人的控制程序,接收来自传感器的信息,并根据预设的算法和指令,计算出机器人各个关节的运动轨迹和动作参数。
它具有强大的计算能力和数据处理能力,能够快速准确地响应各种控制指令,确保机器人的高效运行。
在控制柜中,还有驱动模块。
驱动模块的作用是将主计算机发出的控制信号转换为驱动电机的电流和电压,从而实现机器人关节的精确运动。
不同型号的 ABB 机器人可能会配备不同类型的驱动模块,以适应不同的工作负载和运动要求。
安全继电器也是一个重要的部件。
它主要负责监控机器人系统的安全状态,例如紧急停止按钮是否被按下、防护门是否关闭等。
一旦检测到安全隐患,安全继电器会立即切断机器人的电源,以保障操作人员和设备的安全。
IO 模块则负责机器人与外部设备之间的信号交互。
通过 IO 模块,机器人可以接收来自外部传感器的信号,如接近开关、光电传感器等,也可以向外部执行器发送控制信号,如气缸、电机等。
这样,机器人就能与周边的设备进行协同工作,实现更复杂的自动化任务。
还有轴计算机,它专门负责处理和控制机器人各个轴的运动。
轴计算机与驱动模块密切配合,确保每个轴的运动精度和速度都能达到要求。
散热风扇也是不可或缺的一部分。
由于控制柜在运行过程中会产生大量的热量,散热风扇的作用就是及时将这些热量排出,保证控制柜内部的温度在正常范围内,从而确保各个部件能够稳定运行。
简述abb机器人io配置的流程

温馨小提示:本文主要介绍的是关于简述abb机器人io配置的流程的文章,文章是由本店铺通过查阅资料,经过精心整理撰写而成。
文章的内容不一定符合大家的期望需求,还请各位根据自己的需求进行下载。
本文档下载后可以根据自己的实际情况进行任意改写,从而已达到各位的需求。
愿本篇简述abb机器人io配置的流程能真实确切的帮助各位。
本店铺将会继续努力、改进、创新,给大家提供更加优质符合大家需求的文档。
感谢支持!(Thank you for downloading and checking it out!)阅读本篇文章之前,本店铺提供大纲预览服务,我们可以先预览文章的大纲部分,快速了解本篇的主体内容,然后根据您的需求进行文档的查看与下载。
简述abb机器人io配置的流程(大纲)一、前期准备1.1确认项目需求1.2选择合适的ABB机器人型号1.3了解ABB机器人的硬件和软件系统二、IO配置流程2.1硬件连接2.1.1连接IO板卡2.1.2连接外部设备(如传感器、执行器等)2.1.3确认连接无误并固定接线2.2配置IO信号2.2.1打开RobotStudio软件2.2.2创建新的IO配置2.2.3配置输入/输出信号2.2.4设置信号属性(如类型、长度等)2.2.5分配信号地址2.3信号调试与测试2.3.1检查IO信号配置是否正确2.3.2编写简单的测试程序2.3.3执行测试程序并观察信号变化2.3.4根据测试结果调整IO配置2.4编写IO控制程序2.4.1了解ABB机器人的编程语言(如RAPID)2.4.2编写与外部设备交互的逻辑控制程序2.4.3集成到整体程序中2.5系统调试与优化2.5.1整体测试系统运行效果2.5.2分析系统性能,找出瓶颈2.5.3调整IO配置和程序,优化系统性能三、后期维护3.1定期检查硬件连接3.2更新IO配置和程序3.3对操作人员进行培训一、前期准备在开始ABB机器人的IO配置流程之前,我们需要进行一系列的前期准备工作,以确保配置过程的顺利进行。
ABB机器人14大IO板汇总,都见过已经是ABB机器人专家!

ABB机器人14大IO板汇总,都见过已经是ABB机器人专家!启程工控学院机器人产业班启程机器人学院 7月10开课啦!价格优惠送库卡课程人手一机全程实操暑期开班啦!【现场传来照片】ABB机器人常用IO板大全:1.AD Combi I/O-信号输入输出版 DSQC 6512.Digital I/O-信号输入输出板 DSQC 6523.Relay I/O-信号输入输出板 DSQC 6534.AD Combi I/O-信号输入输出板 DSQC 327A5.Digital I/O-信号输入输出板 DSQC 328A6.Relay I/O-信号输入输出板 DSQC 332A7.模拟量信号输入输出板 DSQC 355A8. Remote I/O 输入输出板 DSQC 350A9.Interbus-S 输入输出板 DSQC 351A10.Prifibus-DP 输入输出板DSQC 352ALink 输入输出板DSQC 378A12. 编译器输入输出板DSQC 377A13.Profibus Fieldbus Adapter-总线板DSQC 66714.Ethernet/IP Fieldbus Adapter-以太网DSQC 66915.输入输出板地址1.AD Combi I/O-信号输入输出版 DSQC 6512.Digital I/O-信号输入输出板 DSQC 6523.Relay I/O-信号输入输出板 DSQC 6534.AD Combi I/O-信号输入输出板 DSQC 327A5.Digital I/O-信号输入输出板 DSQC 328A6.Relay I/O-信号输入输出板 DSQC 332A7.模拟量信号输入输出板 DSQC 355A8. Remote I/O 输入输出板 DSQC 350A9.Interbus-S 输入输出板 DSQC 351A10.Prifibus-DP 输入输出板DSQC 352ALink 输入输出板DSQC 378A12. 编译器输入输出板DSQC 377A13.Profibus Fieldbus Adapter-总线板DSQC 66714.Ethernet/IP Fieldbus Adapter-以太网DSQC 66915.输入输出板地址其实就想跟你说,如果你不懂工业机器人你错过的不仅仅是技术而是一个全新的时代没错!一个全新的时代启程工控学院机器人产业班暑期开班啦!推荐就业班,学ABB机器人送KUKA7月开课暑期开班啦!【现场传来照片】。
ABB机器人外部启动配置说明

ABB机器人外部启动配置说明一、外部IO板的配置ABB标准I/O板DSQC652是最为常用的模块,下面以创建数字输入信号DI,数字输出信号DO,组输入信号GI,组输出信号GO为例做一个详细的讲解。
图1-1对DSQC652端子台的外观进行了描述。
图1-2对DSQC652端子台的各个端子与机器人内部地址(Device mapping)关系进行了描述。
图1-1I/0板上X5为Devicenet通讯端子:其中1-5为Devicenet接线端子拨码开关值分别为2和8,所以2+8=10,此Devicenet地址为10)。
图1-21、定义DSQC652板的总线连接ABB标准I/O板都是下挂在DeviceNet现场总线下的设备,通过X5端口与DeviceNet 现场总线进行通讯。
定义DSQC652板的总线连接相关参数说明见表1-1-1图1-1-1所示的界面图1-1-1单击“使用来自模板的值”行的下拉菜单,选择“DSQC 652 24 VDC I/O Device”,如图1-1-2所示图1-1-2点击【向下】按钮,找到参数名称Address,将值改成10。
单击【确定】,完成DSQC652板的总线连接。
提示“重启”选择【是】。
如图1-1-3所示图1-1-32、创建数字输入信号DI1单击【ABB菜单】✍【控制面板】✍【配置】✍【Signal】✍【添加】显示图1-2-1所示的界面,数字输入信号DI1相关参数说明见表1-2-1按照表1-2-1设定,设定完毕后如图1-2-2所示,单击【确定】,提示“重启”选择【是】,完成数字输入信号DI1的创建。
图1-2-23、创建数字输出信号DO1单击【ABB菜单】✍【控制面板】✍【配置】✍【Signal】✍【添加】显示图1-2-1所示的界面,数字输出信号DO1相关参数说明见表1-3-1择【是】,完成数字输出信号DO1的创建。
图1-3-14、创建组输入信号GI1单击【ABB菜单】✍【控制面板】✍【配置】✍【Signal】✍【添加】显示图1-2-1所示的界面,组输入信号GI1相关参数说明见表1-4-1按照表1-4-1设定,设定完毕后如图1-4-1所示,单击【确定】,提示“重启”选择【是】,完成组输入信号GI1的创建。