3-1点的复合运动解析
点的复合运动

点的合成运动
y’
o’
x’
例2、直升飞机在匀速前进的军舰上降落
y
y’
o’
x’
x
o
点的合成运动
y’ x’
o’
物体的运动的描述结果与所选定的参考系有关。同一物体的运动,在不同的 参考系中看来,可以具有极为不同的运动学特征(具有不同的轨迹、速度、 加速度等)。
相对运动:未知
3、
va ve vr
大小 v1 v2
?
方向 √ √
?
vr va2 ve2 2vave cos60 3.6 m s
arcsin(ve sin 60o ) 46o12
点的合成运动
vr
求解合成运动的速度问题的一般步骤为(P180):
① 选取动点,动系和静系。
B
曲柄-滑块机构
点的合成运动
思考题 动 点:杆上A点。 动系:固连于滑块B。 定系:固连于墙面。 绝对运动? 相对运动? 牵连运动?
点的合成运动
A Bv
点的合成运动
动 点? 动参考系? 绝对运动? 相对运动? 牵连运动?
练习题1
点的合成运动
点的合成运动
点的合成运动
动 点? 动参考系? 绝对运动? 相对运动? 牵连运动?
定系的速度。
点的合成运动
基本概 念
牵连点的概念
(1)、定 义 动参考系给动点直接影响的是该动系上与动点相重合的一点,
这点称为瞬时重合点或动点的牵连点。 (2)、进一步说明
牵连运动一方面是动系的绝对运动,另一方面对动点来说起 着“牵连”作用。但是带动动点运动的只是动系上在所考察的瞬 时与动点相重合的那一点,该点称为瞬时重合点或牵连点。 (3)、注 意
理论力学答案第5章点的复合运动分析
第5章 点的复合运动分析5-1 曲柄OA 在图示瞬时以ω0绕轴O 转动,并带动直角曲杆O 1BC 在图示平面内运动。
若d 为已知,试求曲杆O 1BC 的角速度。
解:1、运动分析:动点:A ,动系:曲杆O 1BC ,牵连运动:定轴转动,相对运动:直线,绝对运动:圆周运动。
2、速度分析:r e a v v v += 0a 2ωl v =;0e a 2ωl v v == 01e 1ωω==AO v BC O (顺时针)5-2 图示曲柄滑杆机构中、滑杆上有圆弧滑道,其半径cm 10=R ,圆心O 1在导杆BC 上。
曲柄长cm 10=OA ,以匀角速rad/s 4πω=绕O 轴转动。
当机构在图示位置时,曲柄与水平线交角 30=φ。
求此时滑杆CB 的速度。
解:1、运动分析:动点:A ,动系:BC ,牵连运动:平移,相对运动:圆周运动,绝对运动:圆周运动。
2、速度分析:r e a v v v +=πω401a =⋅=A O v cm/s ; 12640a e ====πv v v BC cm/s5-3 图示刨床的加速机构由两平行轴O 和O 1、曲柄OA 和滑道摇杆O 1B 组成。
曲柄OA 的末端与滑块铰接,滑块可沿摇杆O 1B 上的滑道滑动。
已知曲柄OA 长r 并以等角速度ω转动,两轴间的距离是OO 1 = d 。
试求滑块滑道中的相对运动方程,以及摇杆的转动方程。
解:分析几何关系:A 点坐标 d t r x +=ωϕcos cos 1 (1) t r x ωϕsin sin 1= (2) (1)、(2)两式求平方,相加,再开方,得: 1.相对运动方程trd r d t r d t rd t r x ωωωωcos 2sin cos 2cos 22222221++=+++=将(1)、(2)式相除,得: 2.摇杆转动方程: dt r tr +=ωωϕcos sin tandt r t r +=ωωϕcos sin arctan5-4 曲柄摇杆机构如图所示。
带电粒子在复合场中的运动整理

专题:带电粒子在复合场中的运动一、复合场及其特点这里所说的复合场是指电场、磁场、重力场并存,或其中某两种场并存的场.带电粒子在这些复合场中运动时,必须同时考虑电场力、洛仑兹力和重力的作用或其中某两种力的作用,因此对粒子的运动形式的分析就显得极为重要.二、带电粒子在复合场电运动的基本分析1.当带电粒子在复合场中所受的合外力为0时,粒子将做匀速直线运动或静止.2.当带电粒子所受的合外力与运动方向在同一条直线上时,粒子将做变速直线运动.3.当带电粒子所受的合外力充当向心力时,粒子将做匀速圆周运动.4.当带电粒子所受的合外力的大小、方向均是不断变化的时,粒子将做变加速运动,这类问题一般只能用能量关系处理.三、电场力和洛仑兹力的比较1.在电场中的电荷,不管其运动与否,均受到电场力的作用;而磁场仅仅对运动着的、且速度与磁场方向不平行的电荷有洛仑兹力的作用.2.电场力的大小F=Eq,与电荷的运动的速度无关;而洛仑兹力的大小f=Bqvsinα,与电荷运动的速度大小和方向均有关.3.电场力的方向与电场的方向或相同、或相反;而洛仑兹力的方向始终既和磁场垂直,又和速度方向垂直.4.电场力既可以改变电荷运动的速度大小,也可以改变电荷运动的方向,而洛仑兹力只能改变电荷运动的速度方向,不能改变速度大小5.电场力可以对电荷做功,能改变电荷的动能;洛仑兹力不能对电荷做功,不能改变电荷的动能.6.匀强电场中在电场力的作用下,运动电荷的偏转轨迹为抛物线;匀强磁场中在洛仑兹力的作用下,垂直于磁场方向运动的电荷的偏转轨迹为圆弧.四、对于重力的考虑重力考虑与否分三种情况.1对于微观粒子,如电子、质子、离子等一般不做特殊交待就可以不计其重力,因为其重力一般情况下与电场力或磁场力相比太小,可以忽略;而对于一些实际物体,如带电小球、液滴、金属块等不做特殊交待时就应当考虑其重力.2在题目中有明确交待的是否要考虑重力的,这种情况比较正规,也比较简单.3对未知名的带电粒子其重力是否忽略又没有明确时,可采用假设法判断,假设重力计或者不计,结合题给条件得出的结论若与题意相符则假设正确,否则假设错误.五、复合场中的特殊物理模型1.粒子速度选择器2.磁流体发电机3.电磁流量计.4.质谱仪5.回旋加速器1.如图所示,在x轴上方有匀强电场,场强为E;在x轴下方有匀强磁场,磁感应强度为B,方向如图,在x轴上有一点M,离O点距离为L.现有一带电量为十q的粒子,使其从静止开始释放后能经过M点.如果把此粒子放在y轴上,其坐标应满足什么关系重力忽略不计2.如图所示,在宽l的范围内有方向如图的匀强电场,场强为E,一带电粒子以速度v垂直于电场方向、也垂直于场区边界射入电场,不计重力,射出场区时,粒子速度方向偏转了θ角,去掉电场,改换成方向垂直纸面向外的匀强磁场,此粒子若原样射入磁场,它从场区的另一侧射出时,也偏转了θ角,求此磁场的磁感强度B.3.初速为零的离子经过电势差为U的电场加速后,从离子枪T中水平射出,经过一段路程后进入水平放置的两平行金属板MN和PQ之间.离子所经空间存在一磁感强度为B的匀强磁场,如图所示.不考虑重力作用,离子荷质比q/mq、m分别是离子的电量与质量在什么范围内,离子才能打在金属板上4.如图所示,M、N为两块带等量异种电荷的平行金属板,S1、S2为板上正对的小孔,N板右侧有两个宽度均为d的匀强磁场区域,磁感应强度大小均为B,方向分别垂直于纸面向里和向外,磁场区域右侧有一个荧光屏,取屏上与S1、S2共线的O点为原点,向下为正方向建立x轴.板左侧电子枪发射出的热电子经小孔S1进入两板间,电子的质量为m,电荷量为e,初速度可以忽略.求:1当两板间电势差为U0时,求从小孔S2射出的电子的速度v0;2两金属板间电势差U在什么范围内,电子不能穿过磁场区域而打到荧光屏上;3电子打到荧光屏上的位置坐标x和金属板间电势差U的函数关系.5.如图所示为一种获得高能粒子的装置,环形区域内存在垂直纸面向外.大小可调节的均匀磁场,质量为m,电量+q的粒子在环中作半径为R的圆周运动,A、B为两块中心开有小孔的极板,原来电势都为零,每当粒子飞经A板时,A板电势升高为U,B板电势仍保持为零,粒子在两板间电场中得到加速,每当粒子离开B板时,A板电势又降为零,动能不断增大,而绕行半径不变.l设t=0时粒子静止在A板小孔处,在电场作用下加速,并绕行第一圈,求粒子绕行n圈回到A板时获得的总动能E n.2为使粒子始终保持在半径为R的圆轨道上运动,磁场必须周期性递增,求粒子绕行第n圈时的磁感应强度B n.3求粒子绕行n圈所需的总时间t n设极板间距远小于R.4在2图中画出A板电势U与时间t的关系从t=0起画到粒子第四次离开B板时即可. 5在粒子绕行的整个过程中,A板电势是否可始终保持为+U为什么RAB6.如图所示,在直角坐标系的第Ⅱ象限和第Ⅳ象限中的直角三角形区域内,分布着磁感应强度均为B=×10-3T的匀强磁场,方向分别垂直纸面向外和向里.质量为m=×10-27㎏、电荷量为q =+×10-19C的α粒子不计α粒子重力,由静止开始经加速电压为U=1205V的电场图中未画出加速后,从坐标点M-4,2处平行于x轴向右运动,并先后通过两个匀强磁场区域.1请你求出α粒子在磁场中的运动半径;2你在图中画出α粒子从直线x=-4到直线x=4之间的运动轨迹,并在图中标明轨迹与直线x=4交点的坐标;3求出α粒子在两个磁场区域偏转所用的总时间.7.如图所示,竖直平面xOy内存在水平向右的匀强电场,场强大小E=10N/c,在y≥0的区域内q=+、质量还存在垂直于坐标平面向里的匀强磁场,磁感应强度大小B=一带电量0.2Cm=的小球由长0.4m0.4kgl=的细线悬挂于P点小球可视为质点,现将小球拉至水平位置A无初速释放,小球运动到悬点P正下方的坐标原点O时,悬线突然断裂,此后小球又恰好能通过O点正下方的N点.g=10m/s2,求:1小球运动到O点时的速度大小;2悬线断裂前瞬间拉力的大小;3ON间的距离8.两块平行金属板MN 、PQ 水平放置,两板间距为d 、板长为l ,在紧靠平行板右侧的正三角形区域内存在着垂直纸面的匀强磁场,三角形底边BC 与PQ 在同一水平线上,顶点A 与MN 在同一水平线上,如图所示.一个质量为m 、电量为+q 的粒子沿两板中心线以初速度v 0水平射入,若在两板间加某一恒定电压,粒子离开电场后垂直AB 边从D 点进入磁场,BD=41AB,并垂直AC 边射出不计粒子的重力.求: 1两极板间电压;2三角形区域内磁感应强度;3若两板间不加电压,三角形区域内的磁场方向垂直纸面向外.要使粒子进入磁场区域后能从AB 边射出,试求所加磁场的磁感应强度最小值.9.如图甲所示,竖直挡板MN 左侧空间有方向竖直向上的匀强电场和垂直纸面向里的水平匀强磁场,电场和磁场的范围足够大,电场强度E =40N/C,磁感应强度B 随时间t 变化的关系图象如图乙所示,选定磁场垂直纸面向里为正方向.t =0时刻,一质量m =8×10-4kg 、电荷量q =+2×10-4C 的微粒在O 点具有竖直向下的速度v =0.12m/s,O ´是挡板MN 上一点,直线OO´与挡板MN 垂直,取g =10m/s 2.求:1微粒再次经过直线OO´时与O 点的距离; 2微粒在运动过程中离开直线OO ´的最大高度;3水平移动挡板,使微粒能垂直射到挡板上,挡板与O 点间的距离应满足的条件.M O O ´ v B EO t /s B /T5π 15π 25π 35π 10π 20π 30π10.如图所示,在倾角为30°的斜面OA 的左侧有一竖直档板,其上有一小孔P ,OP=0.5m.现有一质量m =4×10-20kg,带电量q =+2×10-14C 的粒子,从小孔以速度v 0=3×104m/s 水平射向磁感应强度B =、方向垂直纸面向外的一圆形磁场区域.且在飞出磁场区域后能垂直打在OA 面上,粒子重力不计.求:1粒子在磁场中做圆周运动的半径; 2粒子在磁场中运动的时间; 3圆形磁场区域的最小半径;4若磁场区域为正三角形且磁场方向垂直向里,粒子运动过程中始终不碰到挡板,其他条件不变,求:此正三角形磁场区域的最小边长.11.如图所示,在x>0的空间中,存在沿x 轴方向的匀强电场,电场强度E=10N/C ;在x<0的空间中,存在垂直xy 平面方向的匀强磁场,磁感应强度B=.一带负电的粒子比荷q/m=160C/kg,在x=0.06m 处的d 点以8m/s 沿y 轴正方向的初速度v 0开始运动,不计带电粒子的重力.求: 1带电粒子开始运动后第一次到达y 轴时的坐标. 2带电粒子进入磁场后经多长时间会返回电场. 3带电粒子的y 方向分运动的周期. 30OP Av12.如图所示,一绝缘圆环轨道位于竖直平面内,半径为R,空心内径远小于R.以圆环圆心O为原点在环面建立平面直角坐标系xOy,在第四象限加一竖直向下的匀强电场,其他象限加垂直环面向外的匀强磁场.一带电量为+q、质量为m的小球在轨道内从b点由静止释放,小球刚好能顺时针沿圆环轨道做圆周运动.1求匀强电场的电场强度E.2若第二次到达最高点a,小球对轨道恰好无压力,求磁感应强度B.3求小球第三次到达a点时对圆环的压力.13.如图所示的区域中,左边为垂直纸面向里的匀强磁场,磁感应强度为B,右边是一个电场强度大小未知的匀强电场,其方向平行于OC且垂直于磁场方向.一个质量为m,电荷量为-q的带电粒子从P孔以初速度v0沿垂直于磁场方向进入匀强磁场中,初速度方向与边界线的夹角θ=60°,粒子恰好从C孔垂直于OC射入匀强电场,最后打在Q点,已知OQ=2OC,不计粒子的重力,求:1粒子从P运动到Q所用的时间t.2电场强度E的大小.3粒子到达Q点的动能E kQ.14.如图所示,在半径为R的绝缘圆筒内有匀强磁场,方向垂直纸面向里,圆筒正下方有小孔C与平行金属板M、N相通.两板问距离为两板与电动势为E的电源连接,一带电量为一质量为-q、质量为m的带电粒子重力忽略不计,开始时静止于C点正下方紧靠N板的A点,经电场加速后从C点进入磁场,并以最短的时间从C点射出,己知带电粒子与筒壁的碰撞无电荷量的损失,且每次碰撞时间极短,碰后以原速率返回.求:1筒内磁场的磁感应强度大小.2带电粒子从A点出发至第一次回到A点射出所经历的时间.专题二:带电粒子在复合场中的运动——参考答案1 1、解析:由于此带电粒子是从静止开始释放的,要能经过M 点,其起始位置只能在匀强电场区域.物理过程是:静止电荷位于匀强电场区域的y 轴上,受电场力作用而加速,以速度v 进入磁场,在磁场中受洛仑兹力作用作匀速圆周运动,向x 轴偏转.回转半周期过x 轴重新进入电场,在电场中经减速、加速后仍以原速率从距O 点2R 处再次超过x 轴,在磁场回转半周后又从距O点4R 处飞越x 轴如图所示图中电场与磁场均未画出故有L =2R,L =2×2R,L =3×2R 即 R =L /2n,n=1、2、3………………… ①设粒子静止于y 轴正半轴上,和原点距离为h,由能量守恒得mv 2/2=qEh ……② 对粒子在磁场中只受洛仑兹力作用而作匀速圆周运动有:R =mv /qB ………③解①②③式得:h =B 2qL 2/8n 2mE n =l 、2、3……2、解析:粒子在电场中运行的时间t = l /v ;加速度 a =qE /m ;它作类平抛的运动.有tg θ=at/v=qEl/mv 2………①粒子在磁场中作匀速圆周运动由牛顿第二定律得:qvB=mv 2/r,所以r=mv/qB 又:sin θ=l/r=lqB/mv ………② 由①②两式得:B=Ecos θ/v3、解析:离子在磁场中做匀速圆周运动,作出两条边界轨迹TP 和TQ,分别作出离子在 T 、P 、Q 三点所受的洛仑兹力,分别延长之后相交于O 1、O 2点,如图所示,O 1和O 2分别是TP 和TQ 的圆心,设 R 1和 R 2分别为相应的半径.离子经电压U 加速,由动能定理得.qU =½mv 2………①由洛仑兹力充当向心力得qvB=mv 2/R ………② 由①②式得q/m=2U/B 2R 2由图直角三角形O 1CP 和O 2CQ 可得 R 12=d 2+R 1一d/22,R 1=5d/4……④ R 22=2d 2+R 2一d/22,R 2=17d/4……⑤依题意R 1≤R ≤R 2 ……⑥ 由③④⑤⑥可解得2228932d B U ≤m q ≤222532d B U.24、解析:1根据动能定理,得20012eU mv =解得002eU v m =2欲使电子不能穿过磁场区域而打在荧光屏上,应有mv r d eB=<而212eU mv =由此即可解得222d eB U m <HPBv45°打在荧光屏上的位置坐标为x,则由轨迹图可得2222x r r d =-- 注意到mv r eB=和212eU mv =所以,电子打到荧光屏上的位置坐标x 和金属板间电势差U 的函数关系为222222(22)()2d eB x emU emU d e B U eB m =--≥35、解析:1E n =nqv2∵nqU=½mv 2n∴v n =m nqU2 Rmv n 2=qv n B n B n =mv n /qR以v n 结果代入,B n =qR m m nqU 2=R 1qnmv2 3绕行第n 圈需时n v R π2=2πR qv m 2n 1 ∴t n =2πR qv m 21+21+31+……+n14如图所示,对图的要求:越来越近的等幅脉冲5不可以,因为这样粒子在A 、B 之间飞行时电场对其做功+qv,使之加速,在A 、B 之外飞行时电场又对其做功-qv 使之减速,粒子绕行一周,电场对其作的总功为零,能量不会增大; 6、解析:1粒子在电场中被加速,由动能定理得 221mv qU =α粒子在磁场中偏转,则牛顿第二定律得rv m qvB 2=联立解得2102.312051064.62005.01211927=⨯⨯⨯⨯==--q mU B r m 2由几何关系可得,α粒子恰好垂直穿过分界线,故正确图象为3带电粒子在磁场中的运动周期qBmv r T ππ22==O M 2 -22-4 4 x /my /m -2 vB B4,2-α粒子在两个磁场中分别偏转的弧度为4π,在磁场中的运动总时间 631927105.6105102.321064.614.3241----⨯=⨯⨯⨯⨯⨯⨯===qB m T t πs 47、解:1小球从A 运到O 的过程中,根据动能定理:212mv mgl qEl =- ① 则得小球在O 点速度为:2/s v m == ② 2小球运到O 点绳子断裂前瞬间,对小球应用牛顿第二定律:2v F T mg f m l=-==向洛 ③f Bvq =洛 ④由③、④得:28.2mv T mg Bvq N l=++= ⑤ 3绳断后,小球水平方向加速度25/s x F Eq a m m===电 ⑥ 小球从O 点运动至N 点所用时间0.8t s aυ∆== ⑦ON 间距离21 3.2m 2h gt == ⑧8、 解:⑴垂直AB 边进入磁场,由几何知识得:粒子离开电场时偏转角为30°∵0.v lmd qu v y =0v v tg y=θ ∴qlmdv u 332= 由几何关系得:030cos dl AB = 在磁场中运动半径d l r AB 23431== ∴ 121r mv qv B = ︒=30cos 0v v∴qdmv B 3401=方向垂直纸面向里 ⑶当粒子刚好与BC 边相切时,磁感应强度最小,由几何知识知粒子的运动半径r 2为:42d r = ……… 2分 2202r mv qv B = ∴qd mv B 024=即:磁感应强度的最小值为qdmv 049、解:1由题意可知,微粒所受的重力 G =mg =8×10-3N电场力大小F =Eq =8×10-3N因此重力与电场力平衡微粒先在洛伦兹力作用下做匀速圆周运动,则2v qvB m R=解得 R =mvBq=0.6m 由 2RT vπ=解得T =10πs则微粒在5πs 内转过半个圆周,再次经直线OO´时与O 点的距离 l = 2R =1.2m2微粒运动半周后向上匀速运动,运动的时间为t =5πs,轨迹如图所示,位移大小 s =vt =πm=1.88m因此,微粒离开直线OO´的最大高度 h =s +R =2.48m3若微粒能垂直射到挡板上的某点P ,P 点在直线OO ´下方时,由图象可知,挡板MN 与O 点间的距离应满足L =+m n =0,1,2…若微粒能垂直射到挡板上的某点P ,P 点在直线OO ´上方时,由图象可知,挡板MN 与O 点间的距离应满足 L =+ m n =0,1,2…若两式合写成 L =+ m n =0,1,2…同样给分 510、解:1由r v m qvB 2=,vrT π2=得:m qBmvr 3.0==2画出粒子的运动轨迹如图,可知T t 65=,得:s s qB m t 551023.5103535--⨯=⨯==ππ 3由数学知识可得:︒︒+=30cos 30cos 2r r L 得:m qB mv L 99.010334)134(=+=+=11.1y=0.069m2t=3T== 12.12313.12314.12。
论点的复合运动中动点、动系的选择原则和方法

论点的复合运动中动点、动系的选择原则和方法1引言理论力学是机械、土木类专业的专业基础课。
包括静力学、运动学和动力学三大部分。
运动学是从几何角度研究物体运动轨迹、运动方程、速度和加速度,而不考虑引起物体运动的物理原因。
其中点的合成运动是运动学的重点内容。
此部分内容题目多样,解题方法灵活,并且具有趣味性,完成一道题目时很有成就感。
当然也是让学生感到没有思路、无从下手的部分,普遍反映难度较大,也是测验、考核过程中丢分比较多的部分,问题的关键是无法正确的选取动点和动系。
本文从典型例题出发,介绍了点的合成运动中动点和动系的选取原则,可以帮助学生理清思路,提高点的合成运动的解题能力。
2点的合成运动概述在日常生活中,会经常遇到这样的情况。
当我们站在不同的参考物上,观察同一个物体的运动,发现物体所呈现的运动形式是不一样的。
举个最常见的例子,如图1。
人站在一辆沿直线匀速行驶的公共汽车上,以地面为参考物,观察人的运动,人在作匀速直线运动。
而以公共汽车为参考物,则人静止的。
可见,人的运动形式依选取的参考物不同而不同。
再引申一个例子,如图2。
沿直线轨道滚动的车轮,研究其轮缘上任意一点M的运动。
对于地面来说,点M的轨迹是旋轮线,而对于车厢来说,点M的轨迹则是一个圆。
车轮上的点M是沿旋轮线运动,是一种比较复杂复杂的运动形式,但是以车厢作为参考体,则点M相对于车厢的运动是简单的定轴转动,车厢相对于地面的运动是简单的平移。
轮缘上一点M的运动就可以看成为两个简单运动的合成,即点M相对于车厢作圆周运动,同时车厢相对地面作平移。
于是得到了合成运动的定义,即相对于某一参考体的运动可由相对于其他参考体的几个运动组合而成,称这种运动为合成运动。
3一点二系三运动研究点的合成运动,确定一个动点,选择定参考系和动参考系两个坐标系,分析动点的绝对运动、相对运动和牵连运动是首要任务。
3.1两个参考坐标系研究点的合成运动,总要涉及两个参考坐标系。
(1)定参考系建立在固定参考物上的坐标系,简称定系。
理论力学第七篇_复合运动

例: 刨床急回机构。曲柄长OA r , 两轴间
距杆的oo角1 速 度l 。w求1 。当曲柄在水平位置时摇
wo
w1
o1
步 骤:
运
速
动
度
分
分
析
析
va ve vr
wo
y 解:动点:滑块A;
va B
动系:固连在摇杆O1B上;
vr
ve A
绝对运动:圆周运动;
相对运动:直线运动;
牵连运动:转动。
va ve vr
t0 t
t0 t
t0 t
aa
lim
t 0
va ' va t
ar
lim vr
t 0
' vr1 t
ae
lim
t 0
ve1 ve t
lim vr ' vr lim vr ' vr1 vr1 vr
t0 t
t 0
t
ar
lim vr1 vr t0 t
ar w vr
lim ve ' ve lim ve ' ve1 ve1 ve
牵连运动:平动
aa ae ar
arn
vr2 R
vr
ve
sin
v
sin
arn
1 R
v2
sin2
aa ae ar arn
vr
va
ve
aa sin ae cos arn
aa
1
sin
a
cos
v2
R sin2
actg
v2
R sin3
例2 已知曲柄转动的匀角速度为w, OAr,
OO1 =l, 求当OA处于水平时摇杆O1B的 加速度
第3章 复合运动—习题
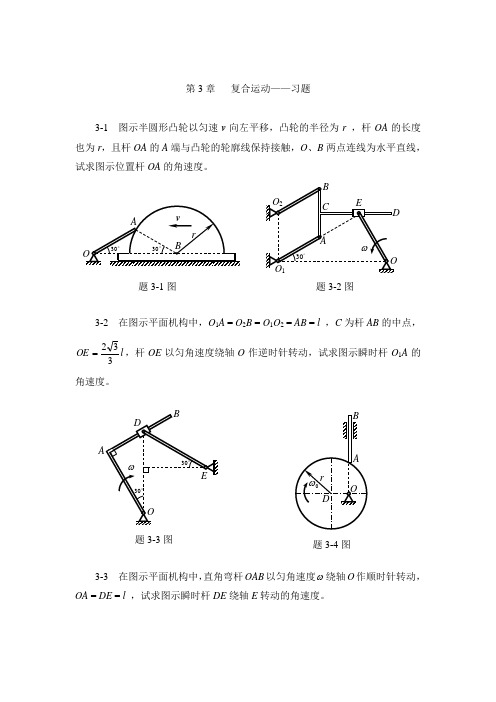
第3章 复合运动——习题3-1 图示半圆形凸轮以匀速v 向左平移,凸轮的半径为r ,杆OA 的长度也为r ,且杆OA 的A 端与凸轮的轮廓线保持接触,O 、B 两点连线为水平直线,试求图示位置杆OA 的角速度。
3-2 在图示平面机构中,O 1A = O 2B = O 1O 2 = AB = l ,C 为杆AB 的中点,l OE 332=,杆OE 以匀角速度绕轴O 作逆时针转动,试求图示瞬时杆O 1A 的角速度。
3-3 在图示平面机构中,直角弯杆OAB 以匀角速度ω绕轴O 作顺时针转动,OA = DE = l ,试求图示瞬时杆DE 绕轴E 转动的角速度。
题3-1图题3-3图题3-4图题3-2图3-4 在图示平面系统中,半径为r ,偏心距OD = r /2 的凸轮以匀角速度0ω绕轴O 作顺时针转动,轴O 在杆AB 的正下方,试求图示位置杆AB 运动的速度。
3-5 在图示平面系统中,长度为l = 2r 的杆OA 以匀角速度0ω绕轴O 作逆时针转动,通过杆A 端与半径为r 的圆盘B 的盘缘接触,从而带动圆盘B 在水平地面上作纯滚动,试求图示瞬时(杆OA 处于水平位置)圆盘B 的角速度。
3-6 在图示平面机构中,O 1A = O 2B = l ,AB = 2l ,杆O 1A 以匀角速度0ω绕轴O 1作逆时针转动。
在图示位置套筒D 恰好位于杆AB 的中点,试求该位置杆DE 沿水平滑道运动的速度。
题3-6图题3-7图题3-8图题3-5图3-7 图示系统处于铅垂平面内,倾角为30°的三角块在水平地面上以匀速度v 向左运动,以推动半径为r 的圆盘A 在铅垂墙面上运动。
试在以下两种情况下分别求圆盘的角速度:(1) 圆盘相对于墙面作纯滚动;(2) 圆盘相对于三角块作纯滚动。
3-8 在图示平面系统中,杆OD 以匀角速度0ω绕轴O 作逆时针转动,滑块B 以匀速0v 水平向右运动,AB = l ,试求图示位置杆AB 的角速度。
点的合成运动

点的合成运动
在此之前,我们研究点的运动时,都是相对于某 一个参考系(定系)而言。但在有些问题中,往往需 要同时在两个不同的参考系中来描述同一点的运动, 而其中一个参考系相对于另一参考系也在运动。
为此,引入动点,动系,定系。并研究同一动点 相对 于两个不同参考系的运动之间的关系。
2013年8月6日
计算有何影响?
2013年8月6日
理论力学CAI
20
选择方法一
动系
动点
2013年8月6日
理论力学CAI
21
选择方法二
动系
动点
2013年8月6日
理论力学CAI
22
动点、动系和定系的选择原则
1. 动点是个确定的点。
2. 动点与动系必须分别选在两个不同的物体上,动点
与动系间有相对运动。
3. 动点相对动系的相对运动轨迹易于直观判断。
例题
已知:AB匀角速度转动。 求:M在导槽EF及BC中运动的速度与加速度。
E
B
C M
A
l F D
2013年8月6日
理论力学CAI
35
y
vB
B
ve
M
E
vM
C
速度分析:
x 动点—M点 动系—BC杆
A
vr
D
l
F
ve = vB = l
v M = ve v r
y : vM = ve sin = l sin x : 0 = vr ve cos
相对轨迹,相对速度vr,相对加速度ar。
2013年8月6日 理论力学CAI
7
牵连运动(entangled motion) :
2022届高三物理二轮专题:带电粒子在复合场中的运动 课件
A.该带电粒子是带正电荷的粒子
B.动能增加,重力势能增加,电势能减少
C.动能不变,重力势能增加,电势能减少
D.动能减少,重力势能增加,电势能增加
考向一
例2
带电粒子在复合场中的匀变速运动
(2019·全国卷Ⅲ·24)空间存在一方向竖直向下的匀强电场,O、P是
电场中的两点.从O点沿水平方向以不同速度先后发射两个质量均为m的
重力加速度g=10 m/s2,问:
(1)油滴在第三象限运动时受到的重力、电场力、
洛伦兹力三力的大小之比,并指出油滴带何种电荷;
(2)油滴在P 点获得的初速度大小;
F
qE
(3)油滴在第一象限运动的时间。
mg
考向三
带电粒子在复合场中的多过程运动
A
×
× ×
×
× ×
C
×
× ×
N
F
qE
mg
考向三 带电粒子在复合场中的多过程运动
小球在y轴右侧匀强电场中受到的合力方向由
A点指向O点,则qE1=mg
q 20
解得m= 9 C/kg
1 2
由 A 到 O 过程中,由动能定理得 mgy1+qE1x1=2mv -0
解得v=4 m/s
qE
mg
(2)小球第二次穿过y轴时的纵坐标;
解析
小球在y轴左侧时,有qE2=mg
故小球做匀速圆周运动,其轨迹如图所示,
2mg=ma
qE
y
F合
v
mg
x
2 2
可得 t2= 5 s
故小球从 O 点到第三次穿过 y 轴所经历的时间
9π
2
2
t=t1+t2= +
点的复合运动整体规律

第三章 点的复合运动
§ 3.1 相对运动.牵连运动.绝对运动
一、研究对象 动点,M
二、两套参考系:
静(定)参考系:以Oxyz表示。
动参考系:以Oxyz表示。
三、三种运动 绝对运动:动点相对静系的运动
动点在绝对运动中的轨迹、速度和加速度,称为绝对轨迹、绝 对速度( va )和绝对加速度( aa )。
第三章 点的复合运动 § 3.2 点的速度合成定理
绝对导数:矢量在静参考系中观察到的对时间 的变化率。
z M(M')
相对导数:矢量在动参考系中观察到的对时间 的变化率。
rM
z' r' k' j'
动点的绝对速度va,绝对加速度aa为
va = rM
(绝对导数)
rO' i' O' y'
xO
x' y
= rO + xi+ yj+ zk+ xi+ yj+ zk
科里奥利力与角动量守恒原理也使热带气旋的云系 围绕着中心旋转。在北半球,热带气旋沿向内逆时 针方向旋转,在南半球则以向内顺时针旋转。
第三章 点的复合运动
例题
例3-1 偏心圆凸轮的偏心距 OCe,半径 r 3e ,设凸轮
以匀角速度O绕轴O转动,试求OC与CA垂直的瞬时,杆AB的
速度。
分析:凸轮为定轴转动, AB杆为直线平移,只要求 出A点的速度就可以知道 AB杆各点的速度。由于A 点始终与凸轮接触,因此, 它相对于凸轮的相对运动 轨迹为已知的圆。
﹡§7-3 质点相对运动动力学的基本方程
设:物体从 h = 1 km 的高度自由下落
x'00 y'00
《理论力学》第七章-点的复合运动
v0
Ra
n r
aa
a
φ
x'
O
n
arn
vr2 R
v2
Rsin2
3、速度分析
va vevr
vr
ve
sin
v
sin
4、加速度分析
aaaear arn
n
aasinaecosarn
aa
acot
v2
Rsin3
48
§7–4 牵连运动为转动的加速度合成定理
牵连运动为平动时加速度合成定理:aaaear
牵连运动为定轴平动时 aaaear是否成立?
37
§7–2 速度合成定理
va vr
应用速度合成定理
va vevr
3、速度分析。 绝对速度va: va=OA·ω=rω , 方向垂直于OA向上
牵连速度ve: ve为所要求的未知量,
方向垂直于O1B 相对速度vr: 大小未知, 方向沿摇杆O1B
38
§7–2 速度合成定理
va vr
其中 O1A l2 r2
1
第七章 点的复合运动
§7–1 复合运动的概念 §7–2 速度合成定理 §7–3 牵连运动为平动时点的加速度合成定理 §7–4 牵连运动为转动时点的加速度合成定理
2
第七章 点的复合运动
复合运动问题:研究物体相对于不同参考系 的运动之间的关系。
复合运动不是一种新的运动形式,只是
一种研究运动学问题的思路和方法。
40
§7–3 牵连运动为平动的加速度合成定理
一、绝对运动和相对运动之间的关系
z M
绝对运动方程:r r(t)
z
r (t)
r (t ) k O j
第八章复合运动

v1
D
v2
K
θ
C E
解: 动点-刀架K
动系-纸板ABCD 绝对运动- 沿导杆的直线运动 相对运动- 牵连运动- 随纸板一起作水平向左的平动
A
F B
v1
D
v2
K
θ
C E va=v2
垂直于纸板的运动方向的直线运动
va ve v r
sin v e v1 0.385 va v2
β
ve
vay´
绝对运动-空间曲线运动
相对运动-以O为圆心的 圆周运动 牵连运动-绕z轴的定轴转动
v x´ r
va ve v r
2 2 2 1
vr= w1R
2 e 2 r
ve= Rw2
va v v R w w
ve w 2 tan vr w1
思考:甲相对于乙的速度为vr, 则能不能直接给出乙 相对于甲的速度? 例 静止的海面上有两艘舰艇A和B,分别以匀速 vA=vB=10(m/s)行驶,如图所示。A艇沿直线向东, B艇则沿以O为圆心, =100m为半径的圆弧行驶。 设在图示瞬时,=30o,s=50(m) 求: (1)B 艇相对于A艇的速度; (2)A 艇相对于B艇的速度。 解
vr 1 v r
ve1 ve '
vr 'vr ve 've v v v v ' e1 e aa lim lim r1 r t 0 t 0 t t va 'va ve1 ve vr 'vr1 lim lim lim t 0 t 0 t 0 t t t
*牵连速度、加速度:ve , ae
牵连点 相对定系的速度、加速度。
理论力学9ppt课件

本章介绍复合运动的基本知识。
学习本章的意义:
复合运动是研究刚体复杂运动的重要基础。
.
2
第3章 复合运动
§3.1 绝对运动 相对运动 牵连运动
这种利用动系和定系来分析运动的方法(或运动的合成与分解),不仅在 工程技术上有广泛应用,而且还是在非惯性参考系中研究动力学问题的基 础。
.
5
§3.2 变矢量的绝对导数与相对导数
目的:
为了给出绝对与相对速度、加速度的关系,需要在两个相对运动着的参考 空间中考察同一个变矢量的变化率。
为此,本节引入矢量的绝对导数和相对导数的概念,并研究它们之间的关
第3章 复合运动 9学时
3.1 绝对运动、相对运动、牵连运动
3.2 变矢量的绝对导数与相对导数
3.3 点的复合运动的分析解法(不要求)
3.3.1 动点的运动方程
3.3.2 动点的速度和加速度合成的解析表达式
3.4 点的复合运动的矢量解法
3.4.1 速度合成定理
3.4.2 加速度合成定理
3.5 刚体的复合运动(不作为重点内容,简单介绍)
系。
变矢量
A
其变化依赖于所选取的参考空间。
定义其中一个空间为定系,另一个空间为动系。
规定:
~A
绝对增量A:
变矢量 A相对定系的增量。
相对增量~A:
定 系
动 系
t 时刻
At
t A tt时刻 t
At At
A Ae
变矢量 A相对动系的增量。
经典高中物理模型--构建复合运动模型 解析物体运动问题

构建复合运动模型解析物体运动问题抽象物理模型是解答物理问题的关键.在对简单问题进行模型化处理时,常可把它抽象为一个已知的物理模型,然而在对某些比较复杂问题进行模型化处理时,常常通过联想旧模型、创造新模型来构建复合模型(或称模型链).构建复合物理模型能将复杂问题转化为简单问题的组合,使问题得到顺利解答.本文通过结合具体教学实例就如何构建复合运动模型来巧解物理竞赛中复杂运动问题.一、构建直线运动和圆周运动的复合运动模型1.构建同一平面内直线运动和圆周运动的复合运动模型,解答摆线运动问题例1 如图1所示,一质量为m、带电量为+q的小球从磁感应强度为B的匀强磁场中A 点由静止开始下落,试求带电小球下落的最大高度h.图1分析与解可以证明这个问题中带电小球运动轨迹是比较复杂的摆线,对高中学生而言从合运动角度分析这个问题比较困难.现构建小球有两个大小相等、方向相反的水平初速度v10、v20,所构建的这两个分运动与小球原有初始运动条件等效.现使小球的分运动v10产生的洛伦兹力为qv10B=mg则v10=mg/qB,因而小球的运动可视为沿水平方向以速度v10做匀速直线运动和在竖直平面内以速度v20做逆时针方向的匀速圆周运动的合运动.匀速圆周运动的半径R=mv20/qB=g(m/qB)2,因而小球在运动过程中下落的最大高度为Hm=2R=2g(m/qB)2.通过构建匀速直线运动和匀速圆周运动复合模型,巧妙地解答了这个复杂问题.2.构建不同平面内的直线运动和圆周运动的复合运动模型,解答螺旋运动问题例2 如图2所示,两个平行板内存在互相平行的匀强电场和匀强磁场,电场强度为E,方向竖直向上,磁感应强度为B.在平行板的右端处有一荧光屏MN,中心为O,OO′既垂直电场方向又垂直荧光屏,长度为L.在荧光屏上以O点为原点建立一直角坐标系,y轴方向竖直向上,x轴正方向垂直纸面向外.现有一束具有相同速度和荷质比的带正电粒子束,沿O′O方向从O′点射入此电场区域,最后打在荧光屏上.若屏上亮点坐标为(L/3,L/6),重力不计.试求:(1)磁场方向;(2)带电粒子的荷质比.图2分析与解带电粒子在相互平行的匀强电场与磁场中运动为比较复杂的三维运动(螺旋线运动),根据力和运动独立作用原理,可以把此螺旋运动构建为y轴方向上的加速直线运动和xOz平面内的匀速圆周运动的复合运动模型.在xOz平面内构建出如图3所示的几何图景,由图3运用物理知识和三角形知识可得:磁场方向竖直向上,且图3R=2L/3,sinθ=/2,θ=π/6.粒子在磁场中运动的时间为t=T/6=πm/(3qB),结合y=Eqt2/(2m)=L/6得粒子的荷质比为q/m=Eπ2/(3B2L).二、构建简谐运动和圆周运动的复合运动模型1.构建简谐运动和圆周运动的复合运动模型,巧解“狗追击狼”的问题例3 如图4所示,一只狼沿半径为R的圆形轨道边缘按逆时针方向匀速跑动.当狼经过A点时,一只猎狗以相同的速度v从圆心O点出发追击狼.设追击过程中,狼、狗、O点始终在同一条直线上.问:狗沿什么轨迹运动?在何处追上狼?分析与解由于狗、狼、O点始终在同一条直线上,狗与狼沿运动轨道的切向的角速度相等,因而可以把狗的运动构建为径向运动和切向圆周运动的复合运动.设当狗离开圆心距离r时,狗的径向速度为v r,切向速度为v t,则图4v t=ωr=v0r/R,由图4可知v r=.由此可知,狗在径向相对圆心O做简谐运动,狗的运动为径向简谐运动和切向圆周运动的复合运动.由简谐运动知识可知r=Rsinωt,任意时刻狗的直角坐标为x=rcosθ,y=rsinθ,结合θ=ωt,得x=Rsinωtcosωt=(1/2)Rsin(2ωt),y=Rsin2ωt=(1/2)R[1-cos(2ωt)],因而得狗的轨迹方程为x2+(y-R/2)2=(R/2)2.即狗的轨迹为一个半径为R/2的圆,在圆形轨道的B点追上狼.有关例3问题在很多参考书上有各种不同解法,笔者认为上述运用构建圆周运动和简谐运动的复合运动模型的方法解答此问题最简捷.2.构建简谐运动和圆周运动的复合运动模型,巧解“有心力作用”问题例4 如图5所示,两个同轴的带电无限长半圆柱面,内外圆柱面的半径分别为a、b.设在图中a<r<b区域内只有径向电场,电势分布为U=klnb/r,其中k为常量.由此电势分布可得出电场强度分布为E=k/r.现有一质量为m、初速为v0、带电量为-q的粒子从左方A处射入,且v0既与圆柱面轴线垂直又与入射处的圆柱的直径垂直(不计带电粒子的重力).图5(1)试问v0为何值时可使粒子沿半径为R(R>a)的半圆轨道运动?(2)若粒子的入射方向与上述v0偏离一个很小的角度β(仍然在图5所示的纸面内),其它条件不变,则粒子将偏离(1)中的半圆轨道.设新轨道与原半圆轨道相交于P点.试证明:对于很小的β角,P点的位置与β角无关,并求出P点的方位角θ=∠AOP的数值.分析与解(1)根据带电粒子在径向电场中做圆周运动的条件,即带电粒子所受的电场力等于粒子沿径向指向圆心O的向心力,得(mv02/R)=qE=(qk/R),则v0=.(2)带电粒子运动轨迹看似比较复杂,但考虑到β较小,粒子沿切向的分速度为v t=v0cosβ≈v0,径向的分速度v r=v0sinβ≈v0β很小.若运用力和运动独立性原理,则把此复杂的运动可构建为沿着半径为R的匀速圆周运动和径向的振幅较小的简谐运动的复合运动.粒子沿径向做简谐运动的平衡位置为r0=R,设振动时的微小位移为x,回复力F r 满足-qk/(r0+x)=Fr-mv2t/(r0+x),即F r=-[qk/(r0+x)-mv2t/(r0+x)],由角动量守恒,得mv0r0=mv t(r o+x),由于x r0,运用数学近似处理,有1/(r0+x)≈(1-x/r0)/r0,1/(r0+x)3≈(1-3x/r0)/r03,结合qk/r0=mv20/r0,得F r=-2mv02x/r02.令k′=2mv20/r02.粒子沿径向做简谐运动的周期为T=2π=πr0/v0.粒子第一次到达平衡位置P点时经过时间为t=T/2,粒子做匀速圆周运动转过的角度为θ=v0t/r0=π(/2).三、构建两个简谐运动模型1.构建两条直线上的复合简谐运动模型例5 如图6所示,一弹性细绳穿过水平面上光滑的小孔O连接一质量为m的小球P,另一端固定于地面上A点,弹性绳的原长为OA,劲度系数为k.现将小球拉到B位置使OB =L,并给小球P以初速度v0,且v0垂直OB.试求:(1)小球绕O点转动90°至C点处所需时间;(2)小球到达C点时的速度.图6分析与解(1)设OB为x轴方向,OC为y轴方向,当小球和O点的连线与x轴成θ角且与O点相距为r时,弹性绳对小球的弹力为F=kr.将力F沿着x、y两个方向分解,有F x=-Fcosθ=-krcosθ=-kx,F y=-Fsinθ=-krsinθ=-ky.由此可知,小球在x方向做初速度为零的简谐运动,在y方向上做初速度为v0的简谐运动,小球运动可视为两个简谐运动组成的复合运动模型.小球到达C点时,Fx=0,即小球恰好经过x轴方向上做简谐运动的平衡位置,故小球从B点运动到C点所经过的时间为小球沿x轴方向做简谐运动的周期的四分之一,即t=T/4=(π/2).(2)因为小球到达C点时在y轴方向上速度为零,所以小球在C点的速度就是在x轴方向上的最大速度,则v C=v xmax=ωL=L.2.构建双振子复合模型,解答多体振动问题例6 如图7所示,质量为2m的均匀带电球M的半径为R,带电量为+Q,开始静止在光滑的水平面上.在通过直径的直线上开一个很小的绝缘、光滑的水平通道.现在球M的最左端A处,由静止开始释放一质量为m、带电量为-Q的点电荷N.若只考虑两电荷间的相互静电力.试求点电荷运动到带电球M的球心时两带电体的速度.图7分析与解均匀带电球M在球内离球心距离为x处产生的电场强度为E=kQx/R3,点电荷N在此处所受的电场力为FN=kQ2x/R3,此时带电球M所受的电场力也为F M=kQ2x/R3,因而可将此系统构建为类似如图8所示的双振子相对质心O′点做简谐运动.由质心运动定理可知,系统的质心O′点静止不动,质心O′点距开始静止的球心O点的距离为x′,则图8x′=(mR/M+m)=(R/3).以质心O′为双振子振动的平衡位置,令k0=kQ2/R3,N相对质心振动等效弹簧劲度系数为kN=3k0/2、振幅为AN=2R/3;球M相对质心振动等效弹簧劲度系数k M=3k0、振幅为AM=R/3.N到达球心时对应于两振子都到达平衡位置,由简谐运动知识得,此时点电荷N、球M的速度分别为vN=AN=2R/3,v M=AM=R/3.。
点的复合运动

12
MM MM M M t t t
1 1
t 0
时的极限,得
MM 1 M 1M MM lim lim lim t 0 t t 0 t t 0 t
va v e vr
13
v v v
a e
vr
va
r
ve
即在任一瞬时点的绝对速度等于其牵连速度与相对 速度的矢量和,这就是点的速度合成定理。
ve
ae
y
x` o`
A
y`
o
转轮
x
5
实例一:车刀的运动分析
动点:车刀刀尖 绝对运动:直线运动 动系:工件
相对运动:曲线运动(螺旋运动) 牵连运动:定轴转动
p4d.swf★
6
实例二:偏心轮的运动分析
动点:AB杆上的A点 绝对运动:上下直线运动 动系:偏心轮C
相对运动:C为圆心的圆周运动
牵连运动:定轴转动
第17章 点的复合运动
1
运动具有相对性,不同的观察者观察的结果不同
以地面为参考系
以盘为参考系
2
§17-1
动 点: 研究对象
点的复合运动概念
z'
x' o'
M
定参考系:(定系)
固定在地球上的坐标系Oxyz 。 动参考系: (动系) 固定在其他相对于地球运动的
z
o x
y'
y
物体上的坐标系
Oxyz
已知:OC=e , R 3e , (匀角速度)图示瞬时, OCCA 且 O,A,B三点 共线。 求:杆AB的速度。
20
解:动点:AB杆上的A点 动系:固连在偏心轮C上 绝对运动- 上下直 线运动 相对运动-以C为圆
点的复合运动-动点、动系的确定
牵连运动:飞机的空间飞行
相对运动:P绕螺旋桨轴的圆周运动
绝对运动:空间螺旋曲线运动
+
动点相对于动系的相对运动
分
合
解
成
动点的绝对运动
点的复合运动,研究点运动分解与合成的规律。
3
问题:动点、动系如何选择??
➢ 动点、动系一定在两个不同的刚体上(存在相 对运动)
➢ 动点、动系选择时应该使点的相对运动简单、 明确(便于运动分析)
试求:图示瞬时( ∠OAB=60 )套筒的转角速度。
A
动点、动系如何选择?
谢 谢!
选持续接触点(关联点)为动点,动系固结 在另一个物体上 。
两个运动物体,无持续接触点
动点:接触点 相对运动?
B
D
A Oe
M
动点:凸轮的轴心A点
动系:固连在顶杆BCD上
相对运动:铅垂直线运动
ω
C
对于两个运动物体无持续接触点(或无关联点) 的情况。
选便于运动分析的点为动点,动系固结在另 一个物体上。
动点、动系选择唯一吗?
动点:L杆上E点
A
动系:固连在上面的构件上
相对运动:以C点为圆心的半圆周运动
是否可以选C点为动点,动系固连在L型杆上 ?
B
C
D
相对运动:以E点为圆心的圆周运动
R
E
v
M
N
a
思考题:
已知平面机构中,曲柄OA以匀角速度 绕O 轴转动,曲 柄长OA=r,摆杆AB 可在套筒C 中滑动,摆杆长AB=4r,套 筒C 绕定轴C 转动。
点的复合运动-动点、动系的确定
研究对象:一个动点
• 绝对运动
动点相对静参考系
复合运动

。利用关系式
~ dr dt
r A A A A
1
r A r A
dr r
dt
可得绝对导数与相对导数的关系: 其中 是动系相对定系的角速度。dt
第三章 复合运动
速度合成公式
设 p 点为运动物体上的一个点,其相 对 O 和 o 向径满足下面关系式
v v e v r e1 e 2 2 a a e a r a c ( ) e1 ( 2 ) e 2
这与点的运动学中得到的极坐标公式完全一致。
第三章 复合运动
ar ~2 d r dt
2
( a r A ) 称为相对加速度,
ac 2 vr (ac A A 2 vr )
称为科氏加速度。
第三章 复合运动
例题 3.1
点的复合运动
一根直管 OP 在 oxy 平面内绕 o 转动,其运动 方程为 (t ) 。一小球 M 在管内沿 OP 运动,其运动 方程为 (t ) 。求 M 的速度和加速度。 y 解:取与管子固联的坐标系 e1 , 2 为 e P 动参考系,则小球的相对运动是直线 运动,相对运动的速度和加速度分别 M e1 和 a r e1 为: v r e1 牵连运动是假想把小球在某瞬时冻结 在管子壁上,由管子拖带着它一起运 动。这个牵连运动是定轴转动,因此
理论力学
——复合运动
李俊峰
第三章 复合运动
复合运动问题是研究物体相对于不同参考系的 运动之间的关系。例如在刚体平面运动和一般运动 中相对于平动坐标系和固定坐标系的运动之间的关系。 复合运动不是一种新的运动形式,只是一种研
高中物理选修3-1电容器和电容知识点考点高考例题总结

1-6 电容器和电容【学习目标】1.理解电容器的电容,掌握平行板电容器的电容的决定因素.理解电容器的电容,掌握平行板电容器的电容的决定因素2.熟练应所学电场知识分析解决带电粒子在匀强电场中的运动问题..熟练应所学电场知识分析解决带电粒子在匀强电场中的运动问题.3.掌握示波管工作原理..掌握示波管工作原理.4.运用静电场的有关概念和规律解决物理问题.运用静电场的有关概念和规律解决物理问题【本讲重点】1.电容器的电容,平行板电容器的电容的决定因素.电容器的电容,平行板电容器的电容的决定因素2.带电粒子在匀强电场中的运动.带电粒子在匀强电场中的运动【本讲难点】电容器的电容电容器的电容 【考点点拨】1.对电容的理解.对电容的理解2.平行板电容器电容的决定因素.平行板电容器电容的决定因素3.电容器的动态分析.电容器的动态分析4.电容器与恒定电流相联系.电容器与恒定电流相联系5.带电粒子在电场中的平衡问题.带电粒子在电场中的平衡问题6.带电粒子(或带电体)在电场中的加速问题.带电粒子(或带电体)在电场中的加速问题 7.带电粒子(或带电体)在电场中的偏转问题.带电粒子(或带电体)在电场中的偏转问题8.带电粒子(或带电体)在电场中运动的综合问题.带电粒子(或带电体)在电场中运动的综合问题(3)带电粒子在电场中的偏转电场中的偏转如图所示,质量为m 电荷量为q 的带电粒子以平行于极板的初速度v 0射入长为L 版间距离为d 的平行版电容器间,两板间电压为的平行版电容器间,两板间电压为 U ,求射出时的偏移、偏转角.,求射出时的偏移、偏转角. ①侧移:①侧移:______________________________________________________千万不要死记公式,要清楚物理千万不要死记公式,要清楚物理过程,根据不同的已知条件,结论改用不同的表达形式(已知初速度、初动能、或加速电压等). ②偏转角:②偏转角:______________________________________________________注意穿出时刻的末速度的反向注意穿出时刻的末速度的反向U L d v 0 m ,qy v t θ θ延长线与初速度方向交于中点位置,以上结论适用于带电粒子能从匀强磁场中穿出的情况.如果带电粒子没有从电场中穿出,此时水平位移不再等于板长L ,应根据情况进行分析.(二)重难点阐释5.带电微粒在电场和重力场的复合场中的运动.带电微粒在电场和重力场的复合场中的运动一般提到的带电粒子由于重力远小于它在电场中受到的电场力,所以其重力往往忽略不计,但当带电体但当带电体(或微粒)的重力跟电场力大小相差不大时,(或微粒)的重力跟电场力大小相差不大时,(或微粒)的重力跟电场力大小相差不大时,就不能忽略重力的作用了,这样的就不能忽略重力的作用了,这样的带电微粒在电场中可能处于静止,也可能做直线运动或曲线运动.带电微粒在电场中可能处于静止,也可能做直线运动或曲线运动.处理此类问题的基本思路,一是电场力当作力学中的一个力看待,然后按研究力学问题的基本方法,从力和运动或能量转换两条途径展开;二是把该物体看作处于电场和重力场同时存在的复合场中,对于这两种不同性质的场,同样可以用场强叠加原理处理.存在的复合场中,对于这两种不同性质的场,同样可以用场强叠加原理处理.二、高考要点精析(一)对电容的理解☆考点点拨电容是表示电容器容纳电荷本领的物理量.由电容器本身的介质特性与几何尺寸决定,与电容器是否带电,带电量的多少、板间电势差的大小等均无关.电容器是否带电,带电量的多少、板间电势差的大小等均无关.【例1】对电容C=Q/U ,以下说法正确的是:,以下说法正确的是:A .电容器充电量越大,电容增加越大.电容器充电量越大,电容增加越大B .电容器的电容跟它两极所加电压成反比.电容器的电容跟它两极所加电压成反比C .电容器的电容越大,所带电量就越多.电容器的电容越大,所带电量就越多D .对于确定的电容器,它所充的电量跟它两极板间所加电压的比值保持不变.对于确定的电容器,它所充的电量跟它两极板间所加电压的比值保持不变解析:解析:电容是表示电容器容纳电荷本领的物理量,电容是表示电容器容纳电荷本领的物理量,电容是表示电容器容纳电荷本领的物理量,与电容器是否带电,与电容器是否带电,与电容器是否带电,带电量的多少、带电量的多少、带电量的多少、板间板间电势差的大小等均无关.故D 正确.正确.答案:答案:D D☆考点精炼1.某一电容器标注的是:“300V 300V,,5μF ”,则下述说法正确的是,则下述说法正确的是 ( ))A .该电容器可在300V 以下电压正常工作电压正常工作B .该电容器只能在300V 电压时正常工作电压时正常工作C .电压是200V 时,电容仍是5μFD .使用时只需考虑工作电压,不必考虑电容器的引出线与电源的哪个极相连.使用时只需考虑工作电压,不必考虑电容器的引出线与电源的哪个极相连(二)平行板电容器电容的决定因素☆考点点拨平行板电容器的电容与板间距离d 成反比,与两半正对面积S 成正比,与板间介质的介电常数e 成正比,其决定式是:d s kd s C e p eµ=4 ☆考点精炼 2.1999年7月12日日本原子能公司所属敦贺湾核电站由于水管破裂导致高辐射冷却剂外流,在检测此次重大事故中应用了非电量变化(冷却剂(冷却剂 外泄使管中液面变化)转移为电信号的自动化测量技术转移为电信号的自动化测量技术..图是一种通过检测电容器电容的变化来检测液面高低的仪器原理图,容器中装有导电液体,是电容器的一个电极,中间的芯柱是电容器的另一个电极,芯柱外面套有绝缘管(塑料或橡皮)作为电介质,电容器的两个电极分别用导线接在指示器上,指示器上显示的是电容的大小,但从电容的大小就可知容器中液面位置的高低,但从电容的大小就可知容器中液面位置的高低,为此,为此,以下说法中正确的是以下说法中正确的是A .如果指示器显示出电容增大了,则两电极正对面积增大,必液面升高.如果指示器显示出电容增大了,则两电极正对面积增大,必液面升高B .如果指示器显示电容减小了,则两电极正对面积增大,必液面升高.如果指示器显示电容减小了,则两电极正对面积增大,必液面升高C .如果指示器显示出电容增大了,则两电极正对面积减小,液面必降低.如果指示器显示出电容增大了,则两电极正对面积减小,液面必降低D .如果指示器显示出电容减小了,则两电极正对面积增大,液面必降低.如果指示器显示出电容减小了,则两电极正对面积增大,液面必降低(三)电容器的动态分析☆考点点拨平行板电容器动态分析这类问题的关键在于弄清哪些是变量,哪些是不变量,在变量中哪些是自变量.哪些是因变量,同时注意理解平行板电容器演示实验现象的实质,一般分两种基本情况:一是电容器两极板的电势差U 保持不变(与电源连接);二是电容器的带电量Q 保持不变(与电源断开)开)电容器和电源连接如图,改变板间距离、改变正对面积或改变板间电解质材料,改变正对面积或改变板间电解质材料,都会改变其都会改变其电容,从而可能引起电容器两板间电场的变化.这里一定要分清两种常见的变化:电容,从而可能引起电容器两板间电场的变化.这里一定要分清两种常见的变化:(1)电键K 保持闭合,则电容器两端的电压恒定(等于电源电动势),这种情况下带电量,C CU Q µ=而d d U E d S kd S C 14µ=µ=,e p e (2)充电后断开K ,保持电容器带电量Q 恒定,这种情况下s E s d U d s C e e e 1,,µµµ K 金属芯线金属芯线 导电液体导电液体电介质电介质 h【例4】一平行板电容器充电后与电源断开,负极板接地,在两极板间有一正电荷(电量很小)固定在P 点,如图所示,以E 表示两极板间的场强,U 表示电容器的电压,W 表示正电荷在P 点的电势能.若保持负极板不动,将正极板移到图中虚线所示的位置,则(示的位置,则( )A .U 变小,E 不变不变B .E 变大,W 变大变大C .U 变小,W 不变不变D .U 不变,W 不变不变(四)电容器与恒定电流相联系☆考点点拨在直流电路中,在直流电路中,电容器的充电过程非常短暂,电容器的充电过程非常短暂,电容器的充电过程非常短暂,除充电瞬间以外,电容器都可以视为断路.应除充电瞬间以外,电容器都可以视为断路.应该理解的是:电容器与哪部分电路并联,电容器两端的电压就必然与哪部分电路两端电压相等.等. P+ -(五)带电粒子(或带电体)在电场中的平衡问题☆考点点拨 在历年高考试题中,常常是电场知识与力学知识联系起来考查.解答这一类题目的关键还是在力学上.当带电体在电场中处于平衡状态时,当带电体在电场中处于平衡状态时,只要在对物体进行受力分析时,只要在对物体进行受力分析时,只要在对物体进行受力分析时,注意分析带注意分析带电体所受的电场力,再应用平衡条件即可求解.电体所受的电场力,再应用平衡条件即可求解.☆考点精炼6.质量为m 的带正电小球A 悬挂在绝缘细线上,且处在场强为E 的匀强电场中,当小球A 静止时,细线与竖直方向成3030°角,°角,已知此电场方向恰使小球受到的电场力最小,则小球所带的电量应为场力最小,则小球所带的电量应为A .E mg 33B B..E mg 3C .E mg 2D D..Emg 2 (六)带电粒子(或带电体)在电场中的加速问题 ☆考点点拨对于此类问题,对于此类问题,首先对物体受力分析,进而分析物体的运动情况(加速或减速,是直线还是首先对物体受力分析,进而分析物体的运动情况(加速或减速,是直线还是曲线运动等),常常用能量的观点求解.,常常用能量的观点求解.(1)若选用动能定理,则要分清有多少个力做功,是恒力功还是变力功,以及初态和末态的动能增量.的动能增量.(2)若选用能量守恒定律,则要分清有多少种形式的能在转化,哪种能量是增加的,那种能量是减少的.能量是减少的.☆考点精炼7.如图所示,两平行金属板竖直放置,左极板接地,中间有小孔.右极板电势随时间变化的规律如图所示.电子原来静止在左极板小孔处.(不计重力作用)下列说法中正确的是(不计重力作用)下列说法中正确的是A .从t=0时刻释放电子,电子将始终向右运动,直到打到右极板上运动,直到打到右极板上 B .从t=0时刻释放电子,电子可能在两板间往复运动间往复运动 C .从t=T /4时刻释放电子,电子可能在两板间振动,也可能打到右极板上板间振动,也可能打到右极板上D .从t=3T /8时刻释放电子,电子必将打到左极板上时刻释放电子,电子必将打到左极板上(七)带电粒子(或带电体)在电场中的偏转问题☆考点点拨如图所示,质量为m 电荷量为q 的带电粒子以平行于极板的初速度v 0射入长L 板间距离为d 的平行板电容器间,两板间电压为U ,求射出时的侧移、偏转角和动能增量等.,求射出时的侧移、偏转角和动能增量等.解题方法:分解为两个独立的分运动:平行极板的匀速运动(运动时间由此分运动决定)t v L 0=,垂直极板的匀加速直线运动,221at y =,at v y =,md qU a =.偏角:0tan v v y =q ,推论:q tan 2L y =. 穿越电场过程的动能增量:ΔE K =qEy (注意,一般来说不等于qU ) U L d v 0 m ,q y v t θ θ-U 0 U 0 O T 2T t φ☆考点精炼(八)带电粒子(或带电体)在电场中运动的综合问题☆考点点拨 当带电体的重力和电场力大小可以相比时,不能再将重力忽略不计.这时研究对象经常被称为“带电微粒”、“带电尘埃”、“带电小球”等等.这时的问题实际上变成一个力学问题,只是在考虑能量守恒的时候需要考虑到电势能的变化.恒的时候需要考虑到电势能的变化.【例9】 已知如图,水平放置的平行金属板间有匀强电场.一根长l的绝缘细绳一端固定在O 点,另一端系有质量为m 并带有一定电荷的小球.小球原来静止在C 点.当给小球一个水平冲量后,它可以在竖直面内绕O 点做匀速圆周运动.若将两板间的电压增大为原来的3倍,求:要使小球从C 点开始在竖直面内绕O 点做圆周运动,至少要给小球多大的水平冲量?在这种情况下,在小球运动过程中细绳所受的最大拉力是多大?大拉力是多大? - + O C知识点一电容器的电容电容器的电容是用比值法来定义的,它与电量、电压无关,仅由电容器本身决定。
配速法巧解复合场问题-高中物理精讲精练解析版
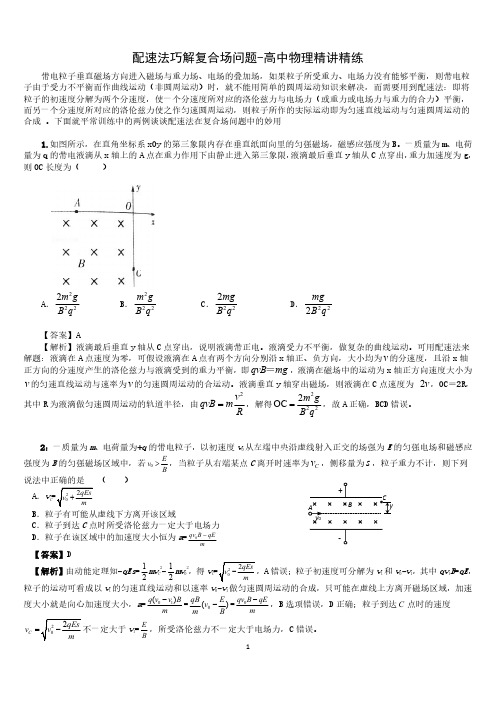
配速法巧解复合场问题-高中物理精讲精练带电粒子垂直磁场方向进入磁场与重力场、电场的叠加场,如果粒子所受重力、电场力没有能够平衡,则带电粒子由于受力不平衡而作曲线运动(非圆周运动)时,就不能用简单的圆周运动知识来解决,而需要用到配速法:即将粒子的初速度分解为两个分速度,使一个分速度所对应的洛伦兹力与电场力(或重力或电场力与重力的合力)平衡,而另一个分速度所对应的洛伦兹力使之作匀速圆周运动,则粒子所作的实际运动即为匀速直线运动与匀速圆周运动的合成。
下面就平常训练中的两例谈谈配速法在复合场问题中的妙用1.如图所示,在直角坐标系xOy 的第三象限内存在垂直纸面向里的匀强磁场,磁感应强度为B。
一质量为m、电荷量为q 的带电液滴从x 轴上的A 点在重力作用下由静止进入第三象限,液滴最后垂直y 轴从C 点穿出,重力加速度为g,则OC 长度为()A.2222m gB q B.222m g B qC.222mg B q D.222mg B q 【答案】A【解析】液滴最后垂直y 轴从C 点穿出,说明液滴带正电。
液滴受力不平衡,做复杂的曲线运动。
可用配速法来解题:液滴在A 点速度为零,可假设液滴在A 点有两个方向分别沿x 轴正、负方向,大小均为v 的分速度,且沿x 轴正方向的分速度产生的洛伦兹力与液滴受到的重力平衡,即qvB mg =,液滴在磁场中的运动为x 轴正方向速度大小为v 的匀速直线运动与速率为v 的匀速圆周运动的合运动。
液滴垂直y 轴穿出磁场,则液滴在C 点速度为2v ,OC=2R,其中R 为液滴做匀速圆周运动的轨道半径,由2v qvB m R=,解得2222OC m gB q =,故A 正确,BCD 错误。
2:一质量为m 、电荷量为+q 的带电粒子,以初速度v 0从左端中央沿虚线射入正交的场强为E 的匀强电场和磁感应强度为B 的匀强磁场区域中,若0v EB>,当粒子从右端某点C 离开时速率为C v ,侧移量为s ,粒子重力不计,则下列说法中正确的是()A.v CB.粒子有可能从虚线下方离开该区域C.粒子到达C 点时所受洛伦兹力一定大于电场力D.粒子在该区域中的加速度大小恒为a =0qv B qEm-【答案】D【解析】由动能定理知-qEs =12mv C 2-12mv 02,得v C,A 错误;粒子初速度可分解为v 1和v 0-v 1,其中qv 1B =qE ,粒子的运动可看成以v 1的匀速直线运动和以速率v 0-v 1做匀速圆周运动的合成,只可能在虚线上方离开磁场区域,加速度大小就是向心加速度大小,a =01()q v v B m -=0(qB Ev m B-=0qv B qE m -,B 选项错误,D 正确;粒子到达C点时的速度C v =v 1=EB ,所受洛伦兹力不一定大于电场力,C 错误。
【工程力学 课后习题及答案全解】第16章点的复合运动习题解

x A = ρ cosϕ , x A = −ρ sin ϕ ⋅ϕ + ρ cosϕ y A = ρ sin ϕ , y A = ρ cosϕ ⋅ ϕ + ρ sin ϕ
xA = ρ cosϕ − 2ρϕ sinϕ − ρϕ 2 cosϕ − ρϕsinϕ
= (ρ − ρϕ 2)cosϕ − (2ρϕ + ρϕ)sinϕ
O
ω
υe
υa
B x
AC
υr
(a)
解:动点:A(OA 上),动系:BC,绝对运动:图周,相对运动:直线,牵连运动:平
移。
va = ve + vr (图 a)
va
=
rω
=
r ⋅ πn 30
=
0.2× π× 90 30
= 0.6πm/s
vBC = ve = va sin 30° = 0.3π= 0.942 m/s(↑)
16-2 图示记录装置中的鼓轮以等角速度 ω0 转动,鼓轮
的半径为 r。自动记录笔连接在沿铅垂方向并按 y = a sin(ω1t) 规
律运动的构件上。试求记录笔在纸带上所画曲线的方程。
解: x = rω 0t
(1)
y = a sin(ω1t)
(2)
由(1) t = x rω 0
代入(2),得
y = a sin(ω1x ) ω0r
=
vB cosθ
=
2 m/s
3
ω OA
=
va 0.15
=
7.70 rad/s
a
n a
+
a
τ a
=
ar
(图
b)
向垂直于 ar 方向投影,得
《理论力学》第三章点的合成运动(三)

解:A-动点,O1B-动系,基座-静系。
绝对速度va = r
相对速度vr = ? 牵连速度ve = ?
由速度合成定理 va= vr+ ve
sin
r
r 2 l
2
,ve
va
sin
r 2
r2 l2
又ve
O1
A1
,1
ve O1 A
1 r 2 l2
A
cR
O
u
x
r 2
r 2 l2
r
r
2
2
l
2
(
)
[例] 圆盘凸轮机构
已知:OC=e , R 3e , (匀角速度)
图示瞬时, OCCA 且 O,A,B三点共线。 求:从动杆AB的速度。
解:动点A,动系-圆盘, 静系-基座。 绝对速度 va = ? 待求,方向//AB 相对速度 vr = ? 未知,方向CA
例图示平面机构,已知:OA=r,0为常数,BC=DE, BD=CE=L,求:图示位置,杆BD的角速度和角加速度。
解: 动点:A点(OA杆)
动系:BC杆
va ve vr
D
E
大小: 方向:
??
B
600 A
vr
300 C
0 O
根据速度合成定理 va ve vr va
ve
做出速度平行四边形, 如图示
E
投至y轴:
0 O aa
aa ae
si
n (
300 ae n aa aen ) sin
sin 60 0
sin 30 0
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
y
B
A
x
O
C
arn
ae
C
动点:C 动系:Axy固连在AB杆上
O a C
art
2018/12/19
32
第1节 点的复合运动
例6
一曲柄摇臂机构中,曲柄
OA以 0作等角速度转动,滑 套C可沿DB滑动,短杆AC则 与 C 固连且垂直于滑套。求 图示位置时,DB的角速度和
0
O
A
B
C
角加速度。已知 OA=AC=l,
2018/12/19
5
第1节 点的复合运动
设Oxyz(动系)相对O0XYZ(定系)的运动已知,P点(动 点)在空间中运动。定义: 相对运动 — 动点对于动系的运动
复合运动或绝对运动 — 动点对于定系的运动 牵连运动 — 动系对于定系的刚体运动 z 可见,绝对运动和相对运动是点 P 的运动,牵连运动是刚体的运动。
C
选C为动点。
aC
0
O
A
ak
ar
C
aen
aet
D
D
v A ωAC rAC vC ve vr
2 aA εAC rAC AC rAC aC ae ar ak
r A(t ) ρ
P
z
Z
R
Z
y
r
O
Y
r A ρ Aρ AA r A ρ
T
dr ω r + dr dt dt
O0
X
RO
X
x
Y
矢量的绝对导数等于它的相对导数加上动系的 角速度叉乘该矢量。
2018/12/19 10
第1节 点的复合运动
速度合成公式
R RO r
dr d r v ω r v vO O dt dt
2018/12/19
24
第1节 点的复合运动
加速度合成公式 a ae ar ac
v v O ω r dr dt
科氏加速度
a aO ε r ω dr d dr dt dt dt
2 d r d r d aO ε r ω ( ω r ) ω r dt dt dt 2
讨论与总结
利用速度合成定理,可以避免列写运动方程及 求导,多用于求特定瞬时(位置)的速度。 进行运动分解时,动点、动系的选择:
动点、动系应选在不同刚体上 动点的相对轨迹应尽量简单或直观
在平面问题中,速度合成定理的几何表达是速 度平行四边形,解析表达式是两个投影方程, 可以解两个未知数。
Z z
R
P
r
O x
y
v ve vr
dr vr 是P点的相对速度 dt
RO
O0
X
Y
ve vO ω r是P点的牵连速度
2018/12/19 11
第1节 点的复合运动
怎么理解速度合成公式呢?
v ve vr
ve vO ω r
牵连速度ve是动参考系(刚体)上与点P重合的点 (称为牵连点)的瞬时速度。 牵连速度 ve可以看成是在该瞬时将 P点固连在动参 考刚体上,跟随动参考刚体一起运动时所具有的 速度,即受刚体的拖带或牵连而产生的速度。
e sin t R cos t
R cos e2 R2
O
C t
当
OCA π 2
t 时,
e R
2 2
e sin e2 R2
R
e t
vAB x e R2 e2 / R
2018/12/19
23
第1节 点的复合运动
ve vA θ vr C x O
相对速度 vr: vr=?,方向已知。
牵连速度 ve: ve=?,方向已知。
B
o A
vBC ve vA sin ωl sin 30 1 l 2
D y
2018/12/19
18
第1节 点的复合运动
例3 凸轮顶杆机构如图,已知 R, , OC e OCA 90 求 时,AB杆的速度。
2018/12/19 28
第1节 点的复合运动
例5 凸轮顶杆机构如图,已知 R, , OC e OCA 90 求 时,AB杆的加速度。
B
A
C
O
2018/12/19
29
第1节 点的复合运动
根据例3,选A为动点,动系Oxy与偏心轮固连 2 2 B e R e 2 2 vA R e , vr R R vr aA art 加速度分析: x ak A a aA , ae , arn , art , ak 的方向如图。 rn
1. 选择动点与动系
动点:曲柄上的A点
O B o θ A C
动系:连杆上oxy
2. 分析运动和速度
x´
绝对运动-以O为圆心 l为半径的等 速圆周运动。 相对运动-沿BC方向的直线运动。
D ´ 2018/12/19 y
牵连运动-铅垂方向的平移
17
第1节 点的复合运动
2、分析运动和速度
绝对速度 vA:vA=ωl,方向已知。
注1:类似于复合函数概念 注2:动系和定系是相对的,在 运动学中可以任意选取。
2018/12/19 6
Z
y
O
Y
Z
R
r
RO
X
x
Y
O0
X
第1节 点的复合运动
点的绝对(复合)运动是由点的相对运动和动坐 标系的牵连运动合成而得。
2018/12/19 7
第1节 点的复合运动
2018/12/19
8
第1节 点的复合运动
ae aO ω r ω (ω r )
a ae ar ac
动系平动: ae aO 动系定轴转动:
ac 0
ae ω r 2r aet aen
动系以常角速度定轴转动: ae 2r aen 相对运动轨迹为曲线: ar art arn
y
P
e2
e1
O
M
x
2018/12/19
26
第1节 点的复合考系
v r e1
a r e1
2
y
v e e 2
a e e1 e 2
a c 2 k v r 2 e 2
e2
o
e1
aet v vr e ar aen
P O
2018/12/19
vr X
va ve vr
v e j v r i R j ui
P
15
第1节 点的复合运动
例2 在正弦机构中,曲柄OA=l,角速度,=30o 求连杆BCD的速度。
O
θ
A C
B
D
2018/12/19 16
第1节 点的复合运动
已知曲柄(刚体,主动件)运动,求连杆(刚体,被动件) 的运动。
第3章 复合运动
3.1 点的复合运动
第1节 点的复合运动
在地球参考系与太阳参考系中行星的运动 最早的天文学理论:托勒密(90-168,埃及)提出 地心说,基本可以解释人们观察到的天体运动规律。
十五世纪下半叶,航海迅 速发展,需要天文学知识 判定方向。天文观测精度 不断提高。发现行星“逆 行”现象。
2018/12/19
3
第1节 点的复合运动
“地心说”牵强解释 “逆行”,在圆上再 套一个甚至套几个圆 “日心说”合理解释 “逆行”
2018/12/19
4
第1节 点的复合运动
以地球为参考系,行星的运动很复杂。 以太阳为参考系,行星的运动很简单。 相对不同参考系,描述运动难易不同。 从运动学角度,应寻找合适的参考系使描 述运动简单;从动力学角度,牛顿定律仅 在惯性系中成立。因此,我们需要研究相 对不同参考系的运动之间的关系。
2 0
2 BD
ak
ar
A
aet
O
B C
aA
aen
将上式向ac方向投影得:
2 2 0 l cos 600 BD (2l ) cos 600 BD (2l ) cos300 2 BD vr BD 30 / 12
D
2018/12/19
35
讨论
vC
0
O A ve
vr
cos R R 2 e2
B
ak
aa art
A
vr
x
C
aA cos ae cos arn ak
4 e aA 4 R
y
ae
arn
R e
2 2
2
o
类似于速度分析中,可以选不同动点动系。
2018/12/19 31
讨论
B
aA ae
A
art arn
y x
动点:A 动系:Cxy,平动系
ae OA 2 R 2 e 2 2
v (R e ) 2 a rn 3 R R R2 e2 2 ak 2 R
2 r 2 2 2
2018/12/19 30
y
ae
o
C
第1节 点的复合运动
加速度合成定理
a A ae ar ak
向y轴投影
A
x y
B
vA
ve
O vr C
2018/12/19