基于MATLAB的直流调速数字控制系统的分析和设计
基于MATLAB的调速控制系统仿真研究设计

基于MATLAB的调速控制系统仿真研究专业:通信工程摘要直流电动机具有非常多的优越性,如调速性能好、转矩大、能在大范围内稳定调速。
在中、小功率的应用中,永磁直流电动机占据第一的地位,但在要求高性能如调速性能或需求大转矩的应用中,直流电动机有极其重要的地位。
双闭环(电流环、转速环)直流调速系统是直流调速系统中的典型系统。
目前,国际许多公司都已经研究出全数字直流调速装置,有商用标准化、系列化、模板化产品。
在国内,各大研究机构和院校也在努力开发全数字直流调速装置。
控制系统的设计、分析和仿真验证过程中,MATLAB具有重要的作用。
直流双闭环调速系统的分析设计中,电流环和转速换的参数设计是最重要的环节。
对于双闭环直流调速系统,本文中选取电流环和转速环的适当参数,通过编程语言对电流环和转速环的频率特性和阶跃响应进行仿真及分析,使调速系统工作于稳定状态,并满足直流调速控制系统动态性能要求。
关键词双闭环,调速控制系统,MATLAB,电流环,转速环ABSTRACTThe DC motor has many advantages, such as speed performance, torque, stable speed control in a wide range. In the medium and small power applications, permanent magnet DC motor to occupy an importantposition, but in the high-speed stability performance requirements or require large torque applications, the DC motor has an extremely important position. Double Loop DC Motor System is a typical system in the DC speed control system. At present, many foreign electrical companies have developed full digital DC converter, and own the commercial standardization, serialization, templates produce. In China, major research institutions and colleges have also developed fully digital DC converter device.In process of control system design, analysis and simulation, MATLAB plays an important role. In DC double closed loop speed control system design, the current loop and speed loop is the most important part. In this article, we select the appropriate parameters of the current loop and speed loop for Double Loop DC Motor System, using programming language on the current loop and speed loop frequency response and step response simulation and analysis, so that the speed control system can run stability, and meet the dynamic performance of DC speed control system requirements.Key Words:Double Closed Loop, Speed control system, MATLAB, Current loop,Speed loop目录1.绪论 (1)1.1概述 (1)1.2研究目标和内容 (2)2.MATLAB软件及仿真调速控制系统概述 (3)2.1MATLAB概述 (3)2.2调速控制系统仿真概述 (4)2.3控制系统常用函数 (4)2.4对控制系统进行仿真MATLAB方法 (5)3双闭环直流调速系统概述 (6)3.1自动控制系统的基础概念 (6)3.2直流调速系统的运行状态和稳定状态指标 (6)3.3双闭环调速系统的结构 (8)3.4双闭环调速系统静止态时的特性 (9)3.5双闭环调速系统的运行时状态的解析 (10)3.6双闭环直流调速系统总体描述 (11)4.双闭环直流调速系统的参数计算与仿真 (12)4.1已知的系统指标 (12)4.2设计系统 (13)4.2.1计算转速和电流反馈系数 (13)4.2.2电流环的参数的动态选取与构造 (13)4.2.3转速环的参数的动态选取与构造 (18)4.3转速电流双闭环直流调速系统模型 (24)4.4总结 (25)5.结束语 (25)参考文献 (27)附录 (28)1.绪论1.1概述直流电动机具有非常好的运行、大范围内的控制和稳定特性,长期以来,直流拖动系统中重要的一部分始终是直流调速系统。
直流调速系统的MATLAB仿真(参考程序)
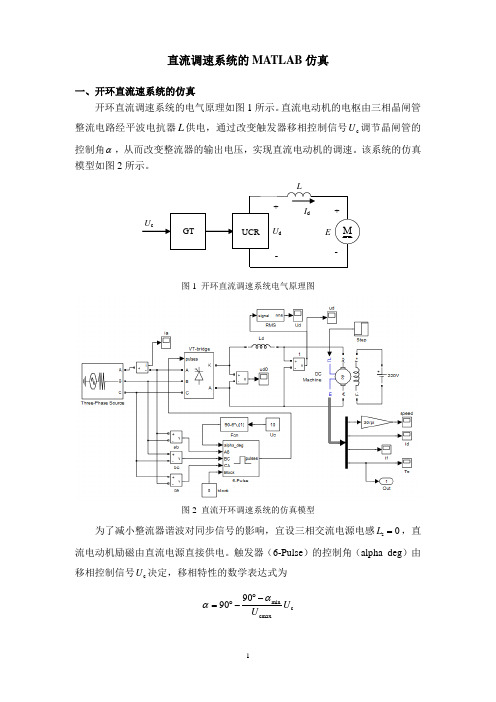
直流调速系统的MATLAB 仿真一、开环直流速系统的仿真开环直流调速系统的电气原理如图1所示。
直流电动机的电枢由三相晶闸管整流电路经平波电抗器L 供电,通过改变触发器移相控制信号c U 调节晶闸管的控制角α,从而改变整流器的输出电压,实现直流电动机的调速。
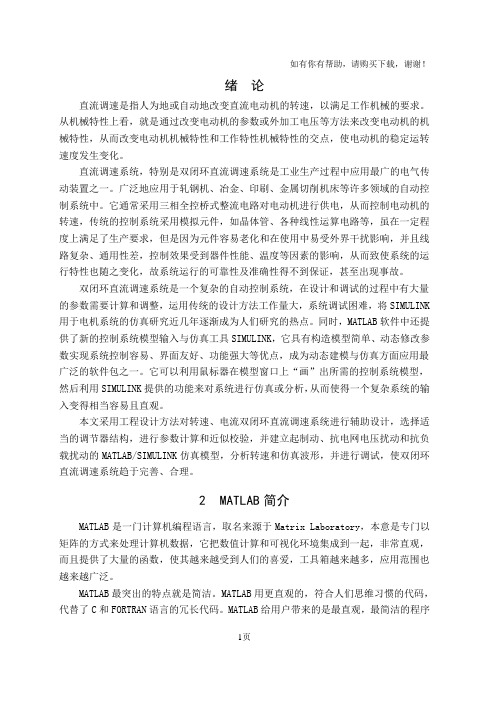
该系统的仿真模型如图2所示。
图1 开环直流调速系统电气原理图图2 直流开环调速系统的仿真模型为了减小整流器谐波对同步信号的影响,宜设三相交流电源电感s 0L =,直流电动机励磁由直流电源直接供电。
触发器(6-Pulse )的控制角(alpha_deg )由移相控制信号c U 决定,移相特性的数学表达式为minc cmax9090U U αα︒-=︒-在本模型中取min 30α=︒,cmax 10V U =,所以c 906U α=-。
在直流电动机的负载转矩输入端L T 用Step 模块设定加载时刻和加载转矩。
仿真算例1 已知一台四极直流电动机额定参数为N 220V U =,N 136A I =,N 1460r /min n =,a 0.2R =Ω,2222.5N m GD =⋅。
励磁电压f 220V U =,励磁电流f 1.5A I =。
采用三相桥式整流电路,设整流器内阻rec 0.3R =Ω。
平波电抗器d 20mH L =。
仿真该晶闸管-直流电动机开环调速系统,观察电动机在全压起动和起动后加额定负载时的电机转速n 、电磁转矩e T 、电枢电流d i 及电枢电压d u 的变化情况。
N 220V U =仿真步骤:1)绘制系统的仿真模型(图2)。
2)设置模块参数(表1) ① 供电电源电压N rec N 2min 2200.3136130(V)2.34cos 2.34cos30U R I U α++⨯==≈⨯︒② 电动机参数 励磁电阻:f f f 220146.7()1.5U R I ===Ω 励磁电感在恒定磁场控制时可取“0”。
电枢电阻:a 0.2R =Ω电枢电感由下式估算:N a N N 0.422019.119.10.0021(H)2221460136CU L pn I ⨯==⨯≈⨯⨯⨯电枢绕组和励磁绕组间的互感af L :N a N e N 2200.21360.132(V min/r)1460U R I K n --⨯==≈⋅T e 60600.132 1.262π2πK K ==⨯≈ T af f 1.260.84(H)1.5K L I === 电机转动惯量2222.50.57(kg m )449.81GD J g ==≈⋅⨯③ 额定负载转矩L T N 1.26136171.4(N m)T K I ==⨯≈⋅表1 开环直流调速系统主要模型参数3)设置仿真参数:仿真算法odel5s ,仿真时间5.0s ,直流电动机空载起动,起动2.5s 后加额定负载L 171.4N m T =⋅。
基于MATLAB的直流调速控制系统设计研究

毕业设计
毕业设计任务书
设计题目:基于 MATLAB 的直流调速控制系统设计研究 系部: 学生: 机械工程系 专业: 机械电子工程 专业负责人: 学号:
指导教师:
ቤተ መጻሕፍቲ ባይዱ
1.设计的主要任务及目标 本设计要求设计者能设计出一个较好的双闭环直流调速系统。 了解直 流 调 速 的 原 理 和 方 法 ,比 较 各 种 调 速 方 法 的 特 点 与 不 足 。本 课 题 还 要 求 研 究 MATLAB 与 Simulink 在 控 制 方 面 的 应 用 , 掌 握 仿 真 程 序 的 编 写 与 Simulink 模 块 参 数 的 设 置 。 2.设计的基本要求和内容 1. 主要调速方法选择,电路选择,调节器调节方式选择 2. 建立系统的数学模型和仿真模型 3. 系统参数的设定与校正 4. 编写仿真程序并进行仿真实验和分析实验结果 3.主要参考文献 [1] 陈伯时 自动控制系统 机械工业出版社 1981.7 [2] 李先允 自动控制系统 高等教育出版社 2003.2 [3]刘坤.MATLAB 自控原理习题精解[M].北京:国防工业出版社,2004 [4] 张葛祥,李娜.MATLAB 仿真技术与应用.清华大学出版社.2003. 4.进度安排 设计各阶段名称 1 2 3 4 5 查阅相关文献资料,并撰写开题报告 分析并确定系统的设计方案 系统各部分的设计和实验 对仿真结果进行研究和分析 整理毕业设计相关资料,准备答辩 起 止 日 期
基于Matlab的矢量控制变频调速系统分析

摘要众所周知,交流异步电机因其结构简单、可靠性高、性能优良、输出转矩大等特点,被广泛的应用,且随着交流异步电机应用领域的不断拓宽,对电机控制系统的设计要求越来越高,既要考虑成本低廉、控制算法合理,又需兼顾控制性能好、开发周期短等特点。
然而变频调速具有高效率、宽范围和高精度等特点,是目前运用最广泛且最有发展前途的调速方式。
交流电动机变频调速系统的种类很多,从早期提出的电压源型变频器开始,相继发展了电流源型,脉宽调制等各种变频器。
本文在分析交流异步电机数学模型的基础上,提出矢量控制。
矢量控制实现的基本原理是通过测量和控制异步电动机定子电流矢量,根据磁场定向原理分别对异步电动机的励磁电流和转矩电流进行控制,从而达到控制异步电动机转矩的目的。
然后借助于MATLAB 仿真建模能力,提出了一种基于MATLAB的矢量控制变频调速系统仿真模型的新方法。
其基本思想是:将交流感应电机控制系统的功能单元模块化,MATLAB中建立独立的功能模块:交流异步电机本体模块、矢量控制模块、速度控制模块、转矩计算模块等,这些功能模块进行有机整合,即可搭建出交流异步电机系统的仿真模型。
控制系统中,速度环采用PI 控制,方法简捷,效果理想。
仿真结果证明了该种新型建模方法的快速性和有效性。
关键词:异步电动机,矢量控制,变频调速,MATLABMatlab-based Vector Control Frequency Control System AnalysisABSTRACTAs is known to all, because of its simple structure, high reliability, good performance, output torque big wait for a characteristic, communication, and widely used asynchronous motor with ac induction motor is expanding, and the fields of application of motor control system design requirements more and more high, both must consider low cost, control algorithm and reasonable and need to juggle good control performance, short development cycle, etc. Therefore, how to establish an effective communication asynchronous motor control system simulation model becomes the motor control algorithm design personnel urgent need to address the key problem. Based on the analysis of ac induction motor based on mathematical model, with the aid of MATLAB simulation modeling ability, strong in the function of using SIMULINK embedded components, proposed based on MATLAB/SIMULINK establish ac asynchronous motor control system simulation model of the new method. The basic idea is: will ac induction motor control system function module, MATLAB/SIMULINK unit in establishing the independent function module: ac induction motor ontology modules, vector control module, current hysteresis control module, speed control module, torque calculation module,the functional modules, can build the organic integration of ac indution motor system simulation model. Control system, the speed loop, current loop by PI control by hysteresis current control, the method is simple, the effect is ideal. The simulation results prove the new quickness and the effectiveness of modeling method.Key words:Induction motor, vector control, frequency control, MATLAB基于Matlab的矢量控制变频调速系统分析马晓文0213071280 引言70年代西门子工程师F.Blaschke首先提出异步电机矢量控制理论来解决交流电机转矩控制问题。
基于MATLAB的直流电机双闭环调速系统设计
摘要直流电机双闭环调速系统是一个复杂的自动控制系统,是目前直流调速系统中的主流设备,具有调速范围宽、平稳性好、稳速精度高等优点,在理论和实践方面都是比较成熟的系统,在拖动领域中发挥着极其重要的作用。
由于直流电机双闭环调速是各种电机调速系统的基础,本文从直流电机的基本特性进行双闭环直流电机设计,最后用实际系统进行工程设计,并采用MATLAB/SIMULINK进行仿真。
对于直流电机双闭环调速系统,在设计和调试过程中有大量的参数需要计算和调整,运用传统的设计方法工作量大,系统调试困难。
本文对直流电机双闭环调速系统进行辅助设计,选择调节器结构,进行参数计算和近似校验,根据给出和计算出的相应参数,建立起制动、抗电网电压扰动和抗负载扰动的MATLAB/SIMULINK仿真模型,分析转速和电流的仿真波形,并进行调试,使直流电机双闭环调速系统趋于完善、合理。
仿真结果证明了该方法的可行性和合理性。
关键词:直流调速,双闭环系统,电流调节器,转速调节器,计算机仿真AbstractThe double closed loop direct current velocity modulation system is a complex automatic control system, is in the present direct current velocity modulation system mainstream equipment, has the velocity modulation scope width, the stability is good, the steady fast precision higher merit, in the theory and the practice aspect all is the quite mature system, in drives in the domain to play the extremely vital role.Because the direct current machine double closed loop velocity modulation is each kind of electrical machinery velocity modulation system foundation, from the direct current machine basic characteristic conducts the double closed loop direct current machine design method research, finally uses the actual system to carry on the engineering design, and uses MATLAB/Simulink to carry on the simulation.Regarding the double closed loop direct current velocity modulation system, has the massive parameters in the design and the debugging process to need to calculate and to adjust, the utilization tradition design method work load is big, system debugging difficulty.This article carries on the assistance design to the double closed loop direct current velocity modulation system, chooses the regulator structure, carries on the parameter computation and the approximate verification, according to produces the corresponding parameter which and calculates, establishes applies the brake, the anti- electrical network voltage perturbation and the anti-load perturbation MATLAB/Simulink simulation model, the analysis rotational speed and the electric current simulation profile, and carries on the debugging, enable the double closed loop direct current velocity modulation system to tend to the consummation, is reasonable. The simulation result has proven this method feasibility and the rationality.Keywords:Speed control of DC-drivers,Double-closed-loop,Current regulator,Speed regulator,Computer simulation目录摘要 (I)Abstract........................................................... I I 目录........................................................... I II 1.绪论. (1)1.1 课题背景 (1)1.2 课题研究的目的和意义 (1)1.3 论文的主要内容 (2)2.直流电动机调速系统 (4)2.1 直流电动机简介 (4)2.1.1 直流电动机的工作原理 (4)2.1.2 直流电动机的运行特性 (5)2.1.3 直流电动机的起动与调速 (6)2.2 转速控制的要求和调速指标 (7)3.方案选择及系统工作原理 (9)3.1 电动机参数及设计要求 (9)3.2 方案选择及系统框图 (9)3.2.1 方案一:直流电机单闭环调速系统 (9)3.2.2 方案二:直流电机双闭环调速系统 (10)3.2.3 方案三:双闭环脉宽调速系统 (11)3.3 系统工作原理简介 (11)3.3.1 双闭环调速系统静态特性 (11)3.3.2 双闭环系统启动过程分析 (14)3.3.3 双闭环调速系统的动态抗扰动性能 (17)3.3.4 双闭环调速系统中两个调节器的作用 (18)4.双闭环调速系统的设计 (19)4.1 双闭环直流调速系统总体设计方案 (19)4.2 主电路设计与参数计算 (20)4.2.1 主电路原理图 (20)4.2.2 整流变压器的设计 (21)4.2.3 晶闸管元件选择 (23)4.2.4 电抗器参数的计算 (24)4.2.5 励磁电路 (26)4.2.6 三相桥式全控整流电路 (26)4.2.7 晶闸管触发电路 (28)4.3 直流调速系统的保护 (30)4.3.1 过电压保护 (30)4.3.2 电流保护 (33)4.4 控制电路设计 (34)4.4.1 电流调节器的设计 (35)4.4.2 转速调节器的设计 (37)5.调速系统的仿真 (40)5.1.1 MATLAB简介 (40)5.1.2 MATLAB的安装 (41)5.1.3 MATLAB的启动运行 (41)5.1.4 MATLAB的帮助文件 (41)5.1.5 MATLAB所定义的特殊变量及其意义 (41)5.1.6 MATLAB工具箱及SIMULINK简介 (42)5.2 调速系统仿真模型的建立 (43)5.3 仿真结果 (43)5.4 仿真结果分析 (46)结论 (47)参考文献 (48)致谢 (49)附录 A (50)1.绪论1.1 课题背景直流调速是现代电力拖动自动控制系统中发展较早的技术。
基于MATLAB的直流电机双闭环调速系统的设计与仿真
基于MATLAB的直流电机双闭环调速系统的设计与仿真直流电机双闭环调速系统是一种常见的控制系统,常用于工业生产中对电机速度的精确控制。
本文将基于MATLAB软件进行直流电机双闭环调速系统的设计与仿真,包括系统设计、参数设置、控制策略选择、系统仿真以及性能分析等方面。
文章将以1200字以上的篇幅进行详细阐述。
一、系统设计直流电机双闭环调速系统由速度环和电流环构成。
速度环控制系统的输入为速度设定值和电机实际速度,输出为电机期望电压;电流环控制系统的输入为速度环输出的电压和电机实际电流,输出为电机实际电压。
通过控制电机的期望电压和实际电压,达到对电机速度的调控。
二、参数设置在进行系统仿真之前,需要确定系统中各个参数的值。
包括电机的额定转矩、额定电压、电感、电阻等参数,以及控制环节的比例增益、积分增益、微分增益等参数。
这些参数的选择会影响系统的稳定性和动态性能,需要根据实际情况进行调整。
三、控制策略选择常见的控制策略包括PID控制、PI控制、PD控制等。
在直流电机双闭环调速系统中,可以选择PID控制策略。
PID控制器由比例环节、积分环节和微分环节组成,可以提高系统的稳定性和响应速度。
四、系统仿真在MATLAB中进行直流电机双闭环调速系统的仿真,可以使用Simulink模块进行搭建。
根据系统设计和参数设置,搭建速度环和电流环的控制器,连接电机实际速度和电机实际电流的反馈信号,输入速度设定值和电机期望电流,输出电机期望电压。
通过仿真可以得到系统的动态响应曲线,评估系统的性能。
五、性能分析在仿真结果中,可以分析系统的静态误差、超调量、调整时间等指标,评估系统的控制性能。
通过参数调整和控制策略更改等方式,可以优化系统的控制性能,使系统达到更好的调速效果。
总结:本文基于MATLAB软件对直流电机双闭环调速系统进行了设计与仿真。
通过系统设计、参数设置、控制策略选择、系统仿真以及性能分析等步骤,可以得到直流电机双闭环调速系统的动态响应曲线,并通过参数调整和控制策略更改等方式,优化系统的控制性能。
基于MATLAB的直流电机调速系统
绪论直流调速是指人为地或自动地改变直流电动机的转速,以满足工作机械的要求。
从机械特性上看,就是通过改变电动机的参数或外加工电压等方法来改变电动机的机械特性,从而改变电动机机械特性和工作特性机械特性的交点,使电动机的稳定运转速度发生变化。
直流调速系统,特别是双闭环直流调速系统是工业生产过程中应用最广的电气传动装置之一。
广泛地应用于轧钢机、冶金、印刷、金属切削机床等许多领域的自动控制系统中。
它通常采用三相全控桥式整流电路对电动机进行供电,从而控制电动机的转速,传统的控制系统采用模拟元件,如晶体管、各种线性运算电路等,虽在一定程度上满足了生产要求,但是因为元件容易老化和在使用中易受外界干扰影响,并且线路复杂、通用性差,控制效果受到器件性能、温度等因素的影响,从而致使系统的运行特性也随之变化,故系统运行的可靠性及准确性得不到保证,甚至出现事故。
双闭环直流调速系统是一个复杂的自动控制系统,在设计和调试的过程中有大量的参数需要计算和调整,运用传统的设计方法工作量大,系统调试困难,将SIMULINK 用于电机系统的仿真研究近几年逐渐成为人们研究的热点。
同时,MATLAB软件中还提供了新的控制系统模型输入与仿真工具SIMULINK,它具有构造模型简单、动态修改参数实现系统控制容易、界面友好、功能强大等优点,成为动态建模与仿真方面应用最广泛的软件包之一。
它可以利用鼠标器在模型窗口上“画”出所需的控制系统模型,然后利用SIMULINK提供的功能来对系统进行仿真或分析,从而使得一个复杂系统的输入变得相当容易且直观。
本文采用工程设计方法对转速、电流双闭环直流调速系统进行辅助设计,选择适当的调节器结构,进行参数计算和近似校验,并建立起制动、抗电网电压扰动和抗负载扰动的MATLAB/SIMULINK仿真模型,分析转速和仿真波形,并进行调试,使双闭环直流调速系统趋于完善、合理。
2MATLAB简介MATLAB是一门计算机编程语言,取名来源于Matrix Laboratory,本意是专门以矩阵的方式来处理计算机数据,它把数值计算和可视化环境集成到一起,非常直观,而且提供了大量的函数,使其越来越受到人们的喜爱,工具箱越来越多,应用范围也越来越广泛。
基于MATLAB的数字PID直流电机调速系统
基于MATLAB的数字PID直流电机调速系统本文主要研究基于MATLAB的数字PID直流电机调速系统。
直流电机是工业生产中常用的电机,其调速系统对于保证生产效率和质量至关重要。
因此,研究直流电机调速系统的控制方法和参数设计具有重要意义。
本文将首先介绍直流电机的数学模型和调速系统的工作原理,然后探讨常规PID控制器的设计方法和参数控制原理,最后通过MATLAB仿真实验来研究数字PID控制器的设计和应用。
2 直流电机调速系统的数学模型直流电机是一种常见的电动机,其数学模型可以用电路方程和动力学方程来描述。
电路方程描述了电机的电气特性,动力学方程描述了电机的机械特性。
通过这两个方程可以得到直流电机的数学模型,为后续的控制器设计提供基础。
3 直流电机调速系统的工作原理直流电机调速系统是通过控制电机的电压和电流来改变电机的转速。
其中,电压和电流的控制可以通过PWM技术实现。
此外,还可以通过变换电机的电极连接方式来改变电机的转速。
直流电机调速系统的工作原理是控制电机的电压和电流,从而控制电机的转速。
4 常规PID控制器的设计方法和参数控制原理常规PID控制器是一种常见的控制器,其控制原理是通过比较实际输出值和期望输出值来调整控制器的参数,从而实现控制目标。
常规PID控制器的参数包括比例系数、积分系数和微分系数,这些参数的选取对于控制器的性能有重要影响。
常规PID控制器的设计方法是通过试错法和经验公式来确定参数值。
5 数字PID控制器的设计和应用数字PID控制器是一种数字化的PID控制器,其优点是精度高、可靠性强、适应性好。
数字PID控制器的设计方法是通过MATLAB仿真实验来确定控制器的参数值。
数字PID控制器在直流电机调速系统中的应用可以提高系统的控制精度和稳定性。
6 结论本文主要研究了基于MATLAB的数字PID直流电机调速系统,介绍了直流电机的数学模型和调速系统的工作原理,探讨了常规PID控制器的设计方法和参数控制原理,最后研究了数字PID控制器的设计和应用。
matlab直流电动机调速系统仿真实训心得
一、概述在现代工业生产中,直流电动机广泛应用于各种设备和机械中,其调速控制系统的稳定性和性能直接影响到整个生产线的效率和质量。
为了提高学生的实践操作能力和掌握直流电动机调速系统的原理和方法,我校开设了相关的仿真实训课程。
在本次实训中,我主要使用Matlab 软件,进行了直流电动机调速系统的仿真实验,获得了丰富的经验和收获,现将心得体会整理如下。
二、理论基础1. 直流电动机调速原理直流电动机调速系统是通过调节电动机的电流或电压来实现转速的调节。
常用的调速方法包括电阻调速、调速励磁和PWM调速等。
2. Matlab在仿真中的应用Matlab是一种功能强大的科学计算软件,广泛用于工程技术领域。
其仿真环境和信号处理工具箱可以方便地进行电机控制系统的建模和仿真。
三、实训内容与步骤1. 系统建模我根据直流电动机的特性和调速原理,进行了系统的建模工作。
通过Matlab的Simulink工具,搭建了直流电动机的数学模型,包括电动机的等效电路、控制系统和负载模型等。
2. 参数设置与仿真在建立完毕电机系统模型后,我对电机的各项参数进行了设置,包括额定转速、额定电流、负载惯量等。
利用Matlab进行了系统的仿真实验,观察了不同调速方法对电机性能的影响。
3. 实验结果分析通过对仿真实验数据的分析,我发现了不同调速方法的优缺点,比较了电机在不同负载和控制参数下的性能表现,提出了一些改进和优化控制策略的建议。
四、心得体会与经验总结1. 对仿真实验的认识通过本次实训,我深刻体会到仿真实验的重要性。
在实际工程中,通过仿真可以事先评估系统设计的合理性,降低试错成本,提高工程质量。
2. 对Matlab的认识与应用Matlab作为工程领域的标准软件之一,其强大的建模和仿真能力为工程师提供了便利。
在实训中,我更加熟练地掌握了Matlab的使用技巧,对其在电机控制系统仿真中的应用有了更深刻的理解。
3. 对直流电动机调速系统的认识通过本次实训,我对直流电动机调速系统的原理和方法有了更加深入的了解,认识到了控制系统设计和参数调节对电机性能的影响,为今后的工程实践打下了坚实的基础。
基于MATLAB的直流调速系统参数整定设计
为三阶对角阵, 使各状态加权值相等 , 对角线元素值
维普资讯
采
矿
技
术
. = 1 0 3 S, r ・71 = 1 ・ 3 0, 071
Y
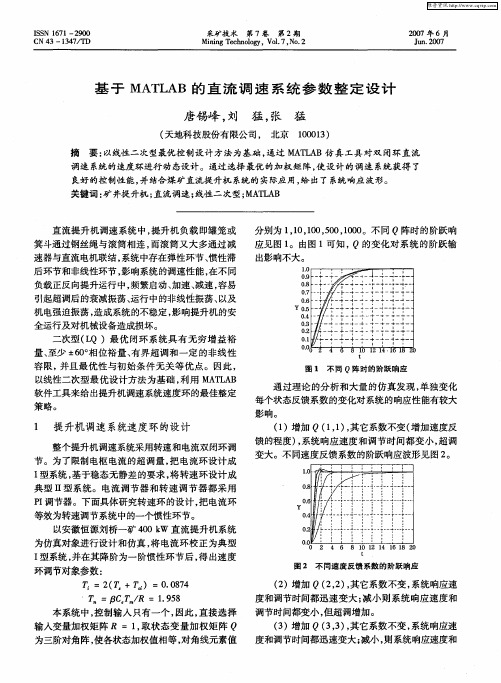
调节时间都变小 , 但超调增加。 接着 , 固定 Q为三阶单位阵 , 分别取 R =1 1 , ,O 10 50 10 。系统 阶跃响应波形见图 3 0, , 0 0 0 。
从 图 3看 出 , 随着 的增 大 , 调 量 逐 渐增 加 , 超
●
/
响应时间和调节时间变长 , 其原 因是闭环极点位置 的变化 , 主导极点不断向虚轴移动 , 因此系统阶跃响 应特 性 变差 。
直 流提 升 机 调 速 系统 中 , 升 机 负 载 即罐 笼 或 提
分别为 11 , 0 50 10 。不同 Q阵时的阶跃响 , 1 ,0 , 0 0 0 0
应 见 图 1 由 图 1可知 ,Q的 变 化对 系统 的 阶跃 输 。 出影 响不大 。
箕斗通过钢丝绳与滚筒相连 , 而滚筒又大多通过减 速器与直流电机联结 , 系统 中存在弹性环节、 惯性滞
后环 节 和非 线性 环节 , 响系统 的调 速 性能 , 影 在不 同
负载正反向提升运行 中, 频繁启动、 加速 、 减速 , 容易 引起超调后的衰减振荡、 运行中的非线性振荡、 以及 机 电强 迫振 荡 , 造成 系统 的不稳 定 , 响提升 机 的安 影
全运 行及 对 机械 设备 造成 损坏 。 二 次型 ( Q )最 优 闭 环 系统 具 有 无 穷 增 益 裕 L 量、 至少 -6 。 位裕 量 、 界 超 调 和 一 定 的非 线 性 40相 - 有 容 限 ,并且 最 优 性 与初 始 条 件 无 关 等 优 点 。 因此 ,
基于MATLAB的直流调速系统参数研究
参数 , 最后单击“ K 键 . O ” 这样就完成了初始参数
的设置 . 照相 同 的方 法 设 置其 他 子 模 块 的初 始 按 参数 , 到如 图 3所 示 的符合 设 计 要 求 的转 速 反 得 馈直 流调 速系统仿 真模 型 .
2 2 参数 整定及 临界 值 的确定 .
经理论 计算 , K .7 r .7时 , 当 =11 , =08 系统 的超调 量小 于 1 %. 以 这 两 个 数 值 为 依 据 , 0 现 对 控制器 的参 数进行 整定 . 于这两 个参 数 , 固定 对 先
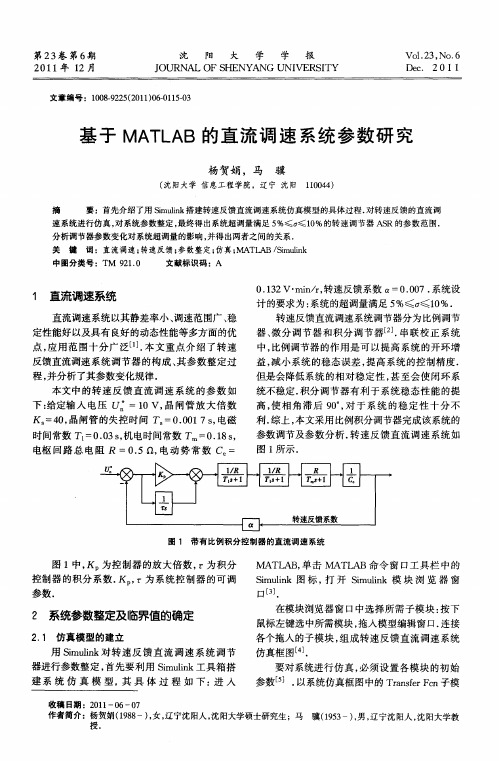
高 , 相角滞 后 9 。对 于系统 的稳定性 十分不 使 0, 利. 综上, 本文采用 比例积分调节器完成该系统的 参 数调节 及参 数 分 析 . 速 反馈 直 流调 速 系 统 如 转
图 1所示 .
时间常数 T = .3 , l 0 0 机电时间常数 T = .8 , s 0 1 S 电枢 回路总 电阻 R=0 5 电动势 常数 C = . Q,
收稿 日期 :2 1 —0 —0 01 6 7
各个拖人的子模块 , 组成转速反馈直流调速 系统 仿真框图【I 4 . 要对系统进行仿真 , 必须设置各模块的初始 参数_ . 5 以系统仿真框 图中的 T as r c 子模 J r f n n eF
作者简介 : 贺娟 (98 , , 宁沈 阳人 , 阳大学硕士研究生 ;马 杨 18 一)女 辽 沈
统 不稳定 . 分 调 节器 有 利 于 系 统稳 态 性 能 的提 积
程, 并分析了其参数变化规律 . 本文 中 的 转 速 反 馈 直 流 调 速 系 统 的 参 数 如
下: 给定输 入 电 压 u =1 晶 闸管 放 大 倍 数 0V, K。 0 晶 闸 管 的失控 时 间 T :00 1 , =4 , .0 S电磁 7
基于MATLAB/SIMULINK直流电机调速系统模糊控制的建模与仿真

式 中 :T =L/ 为 电 枢 回 路 电 磁 时 问 ; R
E=Cn为额 定励 磁下 电 动机 的反电动 势 ; , 在零 初 始条件 下对 ( )式进 行拉 氏变换 得 1
GD。 2 4 =2 . 5;CⅣ一 3 / o PI*e
固定转 矩 为 6 。 7 3 1 电机 模 型 的 实现 .
( ) 电机 数 学模 型 1 额 定励直 流 电机 电枢 回路 电压 平衡 方程式 为 :
U d 。一 E — RI d十 I ,
围 3 直流电机仿真模型
标 器 在 模 型 窗 口上 “ ”出所 需 的控 画
直 流 电机模 糊控制 系统结 构 图如图 1所示 。
图 1 模 糊 控 制 直 流 电 机 系 统框 图
由 图 1可 见 , 机 直 流 调 速 系 统 的 过 程 为 : 测 速 电 由
发 电机输 出 电压 中取 出转速负 反馈 电压 ,与给定 电压 进 行 比较 得 到 的偏 差和 偏 差变 化率 送 给模 糊 控 制 器。 由模 糊控 能 器计算 出 电机控 制量 ,送给 电机 ,实 现 电
2 SMU I K 下直流 调速 系统仿真 模型 的实现 I LN
计算 机仿 真技 术是 应用 电子 计算机 对研究 对象 的 数 学模 型进 行计 算 和分析 的方 法 。对 于从 事控 制系统 研究 与设 计 的技术 人员 而 言 ,MATI B是 目前 控制 A 系统 计算 机辅 助设计 实用 且有 救 的工具 。这不 仅是 因 为 它能解 决控 制论 中大量 存在 的矩 阵运算 问题 ,更 因 为它提供 了强 有力 的工 具箱 支持 。与控 制 系统直接 相 关 的工 具箱 有控制 系统 、系统 辨 识、信 息处 理、优化 等 还有 一些 先进 和流行 的控 制 策略工 具箱 ,如鲁棒 控 制 、u 一分 析与 综台 、神经 网络 、模糊 预 测控 制 、非 线性 控 制设计 、模糊 逻辑 等 。 可以说 目前理论 界 和工 业 界 广 泛 应 用 和 研 究 的控 制 算 法 ,几 乎 都 可 以 在 MATI AB中找到相 应的 工 具箱 。 同时 ,MAT I AB软件 中还提供 了新 的控制 系统模 型输人与仿真工具 S MUI NK,它具有构 造模型简单 、 I I 动态修改参数实现系统控制容易 、 界面友好 、 功能强大等 优点 ,成为动态建模与仿 真方面应用 最广泛的软件包之一。它可以利用 鼠
直流电机调速matlab仿真报告

直流电机调速仿真报告1. 背景直流电机是一种常见的电动机类型,广泛应用于工业生产和家庭设备中。
在实际应用中,为了满足不同工况下的需求,需要对直流电机进行调速控制。
调速控制可以实现电机转速的精确控制,提高系统的稳定性和效率。
本报告旨在通过Matlab仿真分析直流电机调速控制系统,在理论与实践结合的基础上,提出相应的建议。
2. 分析2.1 直流电机调速原理直流电机调速原理主要基于改变电源的电压或者改变外加负载来实现对电机转速的控制。
常见的直流电机调速方法有:•电压调制法:通过改变直流电源的输出电压来改变转矩和转速;•变阻器分压法:通过改变外接阻值来改变转矩和转速;•变极数法:通过改变励磁回路中串联或并联的励磁线圈数目来改变转矩和转速;•PWM调制法:通过脉冲宽度调制技术来控制输入给定功率。
2.2 直流电机调速控制系统直流电机调速控制系统由电源、电机、传感器、控制器和负载组成。
其中,传感器用于测量电机的转速和位置,控制器根据测量值计算出合适的控制信号,通过电源提供给电机。
负载则影响电机的转速和转矩。
常见的直流电机调速控制方法有:•比例积分(PI)控制:根据误差信号进行比例和积分运算,生成合适的输出信号;•模糊控制:基于模糊推理原理,根据输入变量和规则库生成输出信号;•自适应控制:根据系统动态特性自动调整参数以实现最优性能。
2.3 仿真建模与参数设置本次仿真采用Matlab/Simulink软件进行建模与仿真。
首先需要确定直流电机的基本参数,如额定功率、额定转速、额定电压等。
然后根据实际情况设置仿真模型中的参数。
本次仿真设置了一个基于PWM调制法的直流电机调速系统模型。
具体参数如下:•额定功率:100W•额定转速:1500rpm•额定电压:220V•PWM调制频率:1kHz•控制器采样周期:0.01s3. 结果与分析3.1 仿真结果展示在进行仿真之后,我们得到了直流电机调速系统的仿真结果。
以下是部分结果的展示:•转速曲线图:•转矩曲线图:3.2 结果分析根据仿真结果,可以对直流电机调速系统进行分析。
直流电动机双闭环调速系统MATLAB仿真实验报告

直流电动机双闭环调速系统MATLAB仿真实验报告
实验目的:
本实验旨在设计并实现直流电动机的双闭环调速系统,并使用MATLAB进行仿真实验,验证系统的性能和稳定性。
实验原理:
直流电动机调速系统是通过改变电机的输入电压来实现调速的。
双闭环调速系统采用了速度环和电流环两个闭环控制器,其中速度环的输入为期望转速和实际转速的误差,输出为电机的电流设定值;电流环的输入为速度环输出的电流设定值和实际电流的误差,输出为电机的输入电压。
实验步骤:
1.建立直流电动机的数学模型。
2.设计速度环控制器。
3.设计电流环控制器。
4.进行系统仿真实验。
实验结果:
经过仿真实验,得到了直流电动机双闭环调速系统的性能指标,包括上升时间、峰值过渡性能和稳态误差等。
同时,还绘制了调速曲线和相应的控制输入曲线,分析了调速系统的性能和稳定性。
实验结论:
通过对直流电动机双闭环调速系统的仿真实验,验证了系统的性能和
稳定性。
实验结果表明,所设计的双闭环控制器能够实现快速且稳定的直
流电动机调速,满足了实际工程应用的需求。
实验心得:
本实验通过使用MATLAB进行仿真实验,深入理解了直流电动机的双
闭环调速系统原理和实现方式。
通过实验,我不仅熟悉了MATLAB的使用,还掌握了直流电动机的调速方法和控制器设计的原则。
同时,实验中遇到
了一些问题,比如系统的超调过大等,通过调整控制器参数和优化系统结
构等方法,最终解决了这些问题。
通过本次实验,我对直流电动机调速系
统有了更加深入的理解,为之后的工程应用打下了坚实的基础。
根据MATLAB的直流电机双闭环调速系统的设计与仿真

《机电控制系统分析与设计》课程大作业之一 基于MATLAB 的直流电机双闭环调速系统的设计与仿真1 计算电流和转速反馈系数β=U im ∗I dm =10V 4A =1.25Ωα=U nm ∗n =10500=0.02V ∙min/r2 按工程设计法,详细写出电流环的动态校正过程和设计结果根据设计的一般原则“先内环后外环”,从内环开始,逐步向外扩展。
在这里,首先设计电流调节器,然后把整个电流环看作是转速调节系统中的一个环节,再设计转速调节器。
电流调节器设计分为以下几个步骤:a 电流环结构图的简化 1) 忽略反电动势的动态影响在按动态性能设计电流环时,可以暂不考虑反电动势变化的动态影响,即 E ≈0。
这时,电流环如下图所示。
2) 等效成单位负反馈系统如果把给定滤波和反馈滤波两个环节都等效地移到环内,同时把给定信号改成U *i (s ) /β ,则电流环便等效成单位负反馈系统。
3) 小惯性环节近似处理由于T s 和 T 0i 一般都比T l 小得多,可以当作小惯性群而近似地看作是一个惯性环节,其时间常数为T ∑i = T s + T oi 简化的近似条件为电流环结构图最终简化成图。
ois ci 131T T ≤ωb 电流调节器结构的选择 1) 典型系统的选择:从稳态要求上看,希望电流无静差,以得到理想的堵转特性,采用 I 型系统就够了。
从动态要求上看,实际系统不允许电枢电流在突加控制作用时有太大的超调,以保证电流在动态过程中不超过允许值,而对电网电压波动的及时抗扰作用只是次要的因素,为此,电流环应以跟随性能为主,应选用典型I 型系统 2) 电流调节器选择电流环的控制对象是双惯性型的,要校正成典型 I 型系统,显然应采用PI型的电流调节器,其传递函数可以写成K i — 电流调节器的比例系数; τi — 电流调节器的超前时间常数3) 校正后电流环的结构和特性为了让调节器零点与控制对象的大时间常数极点对消,选择则电流环的动态结构图便成为图a 所示的典型形式,其中ss K s W i i i ACR )1()(ττ+=msT l 8i ==τRK K K i s i I τβ=a) 动态结构图:b) 开环对数幅频特性c. 电流调节器的参数计算电流调节器的参数有:K i 和 τi , 其中 τi 已选定,剩下的只有比例系数 K i , 可根据所需要的动态性能指标选取。
单闭环直流调速系统的MATLAB计算与仿真

单闭环直流调速系统的MATLAB计算与仿真单闭环直流调速系统是工程控制中的一种常见系统,它由电机、转速传感器、控制电路和执行机构组成。
MATLAB是一种功能强大的数学软件,可以进行数值计算、数据分析和可视化等工作。
在本文中,我们将介绍如何使用MATLAB来进行单闭环直流调速系统的计算与仿真。
首先,我们需要用到MATLAB中的控制系统工具箱。
这个工具箱包含了一些用于分析和设计控制系统的函数和命令。
可以通过在MATLAB命令窗口中输入"controlSystemDesigner"来打开控制系统设计器。
在这个界面中,我们可以通过拖动和连接不同的图标来构建控制系统。
在单闭环直流调速系统中,我们需要将电机模型与控制电路连接起来。
电机模型可以用传输函数表示,其转速输入和电压输出之间的关系可以由下面的传输函数描述:$G(s) = \frac{k}{s(Ts+1)}$其中,k表示电机的增益,T表示系统的时间常数。
可以根据电机的参数进行实际的估计或测量。
控制电路通常包括PID控制器。
PID控制器以比例、积分和微分三个部分的加权和作为输出,与期望转速进行比较,然后通过调节输入电压来控制电机。
PID控制器的传输函数可以表示为:$C(s) = K_p + \frac{K_i}{s} + K_d s$其中,Kp、Ki和Kd表示比例、积分和微分增益。
有了电机模型和PID控制器的传输函数,我们可以将它们连接起来,并通过控制系统设计器进行仿真。
在设计器中,可以将电机模型作为输入,PID控制器作为输出。
然后,我们可以通过调整PID控制器的增益来改变系统的动态响应。
还可以通过添加阻尼器或滤波器来进一步优化系统的性能。
完成连接后,可以点击设计器界面中的“模拟”按钮来进行系统的仿真。
仿真结果将显示在设计器的右侧窗口中,包括系统的阶跃响应、频率响应和鲁棒性等指标。
通过观察这些指标,可以评估系统的性能并进行参数优化。
除了使用控制系统设计工具箱之外,MATLAB还提供了许多其他功能来进行系统的计算和仿真。
基于matlab的转速、电流反馈控制直流调速系统的simulink仿真

转速、电流反馈控制直流调速系统的仿真基本数据如下:1.直流电动机:V U N 220=、A I N 136=、min/1460r n N =)min /(132.01-∙=r V C e ,允许过载倍数λ=1.5;2.晶闸管装置放大系数:40=s K ;电枢回路总电阻:R=0.5Ω;4.时间常数:s T l 03.0=,s T m 18.0=;电流反馈系数A V I U Nim /05.05.1*==β;转速反馈系数:)min /(007.01460101*-⋅===r V n U N nm α无静差,电流超调量%5≤i σ,空载起动到额定转速时的转速超调量%10≤n σ。
一、电流环仿真图1电流环仿真模型图2仿真结果图3无超调图4较大超调二、双闭环仿真仿真结果显示在直流电动机的恒流升速阶段,电流值低于200A,因为电流调节系统受到电动机反电动势的扰动,为一个线性渐增的扰动量,系统做不到无静差。
把转速调节器的输出当作电流调节器的输入,再用电流调节器的输出去控制电力电子变换器UPE。
从闭环结构上看,电流环在里面,称作内环;转速环在外边,称作外环,构成转速、电流双闭环调速系统。
图5双闭环调速系统仿真模型图6转速环空载高速起动图7转速环满载高速起动图8转速环抗扰波形三、分析总结双闭环调速系统起动过程的电流和转速波形是接近理想快速起动过程的波形。
按照ASR在起动过程中的饱和情况,可将起动过程分为三个阶段:电流上升阶段、恒流升速阶段和转速调节阶段。
从起动时间上看,Ⅱ阶段恒流升速是主要的阶段,因此双闭环系统基本上实现了电流受限制下的快速起动,利用了饱和非线性控制方法,达到“准时间最优控制”。
带PI调节器的双闭环调速系统还有转速必超调的特点。
在双闭环调速系统中,ASR的作用是对转速的抗扰调节并使之在稳态时无静差,其输出限幅决定允许的最大电流;ACR的作用是电流跟随,过流自动保护和及时抑制电压波动。
与带电流截止负反馈的直流调速系统相比,双闭环控制直流调速系统充分利用电机允许的过载能力,在转速上升阶段始终保持电机允许电流的最大值,使电机转速以最大加速度上升;在到达稳定转速后,电流又能在短时间内降下来,使转矩与负载相平衡从而稳态运行,有良好的起动性能。
《MATLAB工程应用》转速单闭环直流调速系统仿真
《MATLAB工程应用》转速单闭环直流调速系统仿真一、选题背景晶闸管开环直流调速系统启动电流大,转速随负载变化而变化,负载越大,转速降落越大,因此,无法在负载变动时保持转速的稳定,影响生产。
为了提高直流调速系统的动静态性能指标,通常采用闭环控制系统(单闭环或双闭环)。
对调速指标要求不高的场合,采用单闭环系统;对调速指标要求高的场合,采用双闭环系统。
按反馈的方式不同,可分为转速反馈、电流反馈、电压反馈。
在单闭环系统中,般采用转速反馈。
二、原理分析转速单闭环直流调速系统原理如图 1 转速单闭环直流调速系统原理图所示。
图 1 转速单闭环直流调速系统原理图中将反映转速变化的电压信号作为反馈信号,经过速度变换后接到电流调节器的输入端,与给定的电压U;相比较经放大后,得到移相控制电压信号Uc,用作控制整流桥的触发电路,触发脉冲经功放后加到晶闸管的门极和阴极之间,以改变整流桥的输出电压,这就构成了速度负反馈闭环系统。
图 1 转速单闭环直流调速系统原理图该系统在电机负载增加时,转速n将下降,转速反馈U n减小,导致转速的偏差ΔU n。
将增大(ΔU n=U n∗−U n),U C增加,并经移相触发器使整流器输出电压U增加,电枢电流1。
也就增加了,从而使电动机电磁转矩增加,转速n也随之升高,补偿了负载增加造成的转速降。
在MATLAB仿真中,通常省略AD采样中的变换环节,直接用测量模块得到实际物理量。
三、过程论述利用Simulink建立有静差的转速单闭环直流调速系统仿真模型。
该系统由给定信号、速度调节器、晶闸管整流桥、平波电抗器、直流电动机、速度反馈等部分组成。
与开环直流调速系统相比,二者的主电路就基本相同,系统的差别主要在控制电路上。
图 2 有静差的转速单闭环直流调速系统仿真模型图 2 有静差的转速单闭环直流调速系统仿真模型中的二极管桥模块参数设置如图 3 二极管参数设置。
在整流桥后面并一个二极管桥,主要是为了加快电动机的减速过程,同时避免在整流桥输出端出现负电压而使波形畸变。
基于MATLAB的双闭环直流调速系统仿真研究

基于MATLAB的双闭环直流调速系统仿真研究双闭环直流调速系统是一种常见的电机控制系统,通过使用两个闭环来控制电机转速和电流,能够使电机稳定运行并满足特定的转速和负载要求。
MATLAB作为一种功能强大的计算软件,可以提供一系列的工具和函数,用于建模、仿真和分析各种控制系统。
双闭环直流调速系统一般由速度环和电流环组成。
速度环用于控制电机的速度,通过测量电机的转速与设定值之间的误差,并将误差信号馈入控制器进行比例、积分、微分运算,最后将输出信号作为电机的控制电压。
电流环则用于控制电机的电流,通过将输出信号与电机的电流进行比较,并通过控制电机的电流调节器来控制电机的电流。
在MATLAB中进行双闭环直流调速系统的仿真研究,主要包括以下步骤:1.建立系统模型:根据实际的电机参数以及控制器的特性,建立电机系统的数学模型。
一般可以使用传递函数来描述电机的动态特性。
2.设计控制器:根据系统的性能要求,设计速度环和电流环的控制器。
可以使用PID控制器或者其他控制算法来实现控制器的设计。
3. 进行仿真实验:根据所设计的控制器和系统模型,进行仿真实验。
在MATLAB中,可以使用Simulink工具箱来搭建系统模型,并通过逐步调整控制器参数,在不同的工况下进行仿真实验,并观察系统的响应。
4.分析结果:根据仿真实验的结果,通过分析系统的响应曲线,评估系统的性能。
可以观察系统的稳态误差、超调量、调节时间等指标,以及系统的抗干扰性能和稳定性。
5.优化控制器参数:根据仿真实验的结果,对控制器参数进行优化调整,以获得更好的系统性能。
可以使用MATLAB提供的优化算法来自动求解最优参数。
总结,基于MATLAB的双闭环直流调速系统仿真研究可以通过建立系统模型、设计控制器、进行仿真实验、分析结果和优化控制器参数等步骤来完成。
通过这些步骤,可以评估控制系统的性能,并对系统进行改进和优化,以满足实际的控制需求。
基于MATLAB的直流调速数字控制系统的分析和设计

2 1 年 3月 2 02 5日第 2 9卷第 2期 Te cm o r cn lg l o P we h oo y e Te Ma.2 , 0 2 o.2 o 2 r 5 2 1 ,V 1 9N 。
文章编号: 0— 6( 1)2 05 4 1 9 642 20— 2— 0 3 0 0 0
一பைடு நூலகம்
图 1 控 制 系统 结 构 图
直 流 电动 机 在 额 定 励 磁 下 的 等 效 电路 如 图 2所 示 , 中电枢 回路 总 电阻 R和 电感 L, 含 电力 电子变 其 包
换 内阻 、 电枢 电阻和 电感 。
R L
图 2 直 流 电 动机 等 效 图
假 设 主 电路 电流 连续 , 电压方 程为 则
运算 结果 通过 D A 转 换 器 变 成 模 拟 量 作 为 可控 整 流 / 装 置 的触 发控 制 电压 。这种 方式 不但 克服 了电 网电压 波动 对触 发精 度 的影 响 , 且 在 一 定 程 度 上也 减 小 了 而 因器 件老化 、 度 变 化 引起 的运 算 误 差 。 由 于计 算 机 温 具 有 高精 度 、 速 度和编 程 灵活 等优 点 , 以在 系统 中 高 可 灵 活 的使用 各 种算 法 实 现 最优 控 制 ; 且 对 控 制 结 果 并 的观察 更加 明确 , 控 制 结 果 的 分析 也 可 以在 显 示 器 对 上 绘 制 曲线 来 表示 _ 。 1 ] 计 算 机控 制 系统 的 经 典设 计 方 法 一 般 分 为 两种 。 种 是将 连续 域设 计 好 的控 制 律 D(: s 利用 不 同 的离 散 化 方法 变换 为离 散 控 制 律 D( ) 这 种 方 法称 为“ z, 连