微机控制技术第6章
chap6微机原理与接口技术第六章——I、O接口和总线
第六章I/O接口和总线本章介绍1.I/O接口I/O接口的功能简单的输入输出接口芯片I/O端口及其寻址方式CPU与外设间的数据传送方式 PC机的I/O地址分配2.总线IBM PC总线AT总线或ISA总线6-1、I/O接口一.I/O接口的功能1.采用I/O接口的必要性计算机和外设之间的信息交换带来一些问题:速度不匹配信号电平不匹配信号格式不匹配时序不匹配因此I/O设备不能直接与CPU的系统总线相连,必须在CPU与外设之间设置专门的接口电路来解决这些问题。
可编程输入输出接口芯片随着大规模集成电路技术的发展,出现了许多通用的可编程接口芯片,可用它们来方便地构成接口电路。
后面几章将介绍常见的可编程I/O接口芯片的原理、编程方法及与CPU的连接方法。
可编程中断控制器8259A可编程计数器/定时器8253可编程外围接口芯片8255A串行通信和可编程接口芯片8253AA/D和D/A转换芯片。
本章介绍最常用的简单I/O接口芯片,主要有缓冲器(Buffer)和锁存器(Latch)。
二、简单的输入输出接口芯片1.缓冲器74LS244和74LS245连接在总线上的缓冲器都具有三态输出能力。
在CPU或I/O接口电路需要输入输出数据时,在它的使能控制端EN(或G)作用一个低电平脉冲,使它的内部的各缓冲单元接通,即处在输出0或1的透明状态。
数据被送上总线。
当使能脉冲撤除后,它处于高阻态。
这时,各缓冲单元像一个断开的开关,等于将它所连接的电路从总线脱开。
74LS244和74LS245就是最常用的数据缓冲器。
除缓冲作用外,它们还能提高总线的驱动能力。
8个三态缓冲单元,分成两组,分别由门控信号为低电平时,数据传送;高电平时,输出高阻态。
单向缓冲器,只能从端。
OE 2.锁存器74LS3731. I/O端口1.数据端口(Data Port)用来存放CPU与外设之间交换的数据,长度一般为1-2个字节,主要起缓冲作用。
2.状态端口(Status Port)用来指示外设的当前状态。
微机接口技术:第六章8237A

8237A的引脚功能(3)
处理器接口信号 A0~A3:内部寄存器选择 DB0~DB7:写入命令字和读出状态信息 IOR、IOW:输入,CPU读写8237A RESET:置位屏蔽寄存器,清除其他寄存器 CS CLK
8237A的工作时序(1)
空闲周期SI:检测DREQ并发送HRQ,CPU可对 其编程或读取状态
基地址寄存器、当前地址寄存器共用一个口地址, 基字节寄存器、当前字节数寄存器共用一个口地 址。
4个方式寄存器共用一个口地址,通过控制字分别 写入相应通道。
8237A的寄存器(各通道共用)
控制寄存器:存储器到存储器方式的设置,扩展 写信号(提前通知I/O)
请求寄存器:存储器到存储器时通道0必须用软件 请求,不可屏蔽,且不能自动初始化
请求:DREQ无效时暂时中止传送,外设可 据此控制过程和速率。
级联:主DMA设置。
传送类型
DMA读:从存储器到外设。 DMA写:从外设到存储器。 DMA校验:空操作,像读写一样产生时序
和地址信号,但存储器和外设控制线无效。 只有存储器才需要地址。
存储器到存储器的传送
固定使用通道0和通道1,通道0指向源区, 通道1指向目的区。
初始化编程
编程前应禁止工作或屏蔽相应通道
往DMA+0DH写任意数据即可复位,复位即可屏 蔽所有通道并清先/后触发器
基地址和基字节的写入应分两次:低8位/高8位; 如先前无复位,则写基值之前应往DMA+0CH端 口写任意数据即可复位先/后触发器。基字节数应 减1
不要忘记送出页面地址
送出方式控制字,解除相应屏蔽
DMA方式
中断方式不适用于高速大量数据的传送 当处于DMA方式时,DMAC控制总线和传
《微机原理及接口技术》第六章
2、CPU对中断的响应
关中断:CPU响应中断后,发中断响应(INTA)信号的同时,内部自动实现关中断 保留断点:封锁IP+1,入栈保存CS:IP。 保护现场:由中断服务程序先将有关REG入栈保存。
给出中断入口、转相应的中断服务程序:中断服务程序起始地址,执行中断服务。
恢复现场:将中断服务程序入栈保存的REG内容弹出,恢复现场。 开中断与返回:中断服务的最后一条指令,出栈恢复CS:IP,恢复主程序运行,使IF自动恢
第十章
J X G
微型计算机开发应用
1/27
J X G
微机原理及接口技术 第六章、中断控制系统
本章要点:
J X G
中断的基本概念 中断处理过程 可编程中断控制器8259A的结构、功能 可编程中断控制器8259A的应用
2/27
J X G
微机原理及接口技术 6.1
一、中断的基本概念
中断系统
J X G
微机原理及接口技术
三、外部中断
8086芯片设置有两条中断请求信号输入引脚:NMI和INTR引脚,用于外部中断 源产生的中断请求,可分为以下两种: 1、可屏蔽中断 INTR (18脚) INTR线上的请求信号是电平触发的。当IF=0,CPU中断不响应,这种情况称为 可屏蔽中断。可屏蔽中断通过指令设置IF中断标志位,达到控制的目的。 STI CLI ;IF←1,开中断,CPU才能响应INTR线上的中断请求。 ;IF←0,关中断,CPU不响应INTR线上的中断请求。
对于系统专用中断,系统将自动提供0~4中断类型号,保证系统自动转到处理程序。
J X G
对于可屏蔽中断INTR,外接口电路产生中断类型号。目前8259A产生。
第6章 PWM控制技术

6-22
10、换流(换相)方式的分类。 11、单相半桥电压型逆变电路的电路图,波形,及工作原理。 12、单相全桥电压型逆变电路的电路图,波形,及工作原理。(非移相调压 方式)。 13、单相桥式电流型逆变电路的电路图,及其对负载的要求。 14、电压型逆变电路中反馈二极管的作用是什么?为什么电流型逆变电路中 没有反馈二极管? 15、PWM控制的基本原理。 16、同步调制,异步调制、分段同步调制的原理。
uo总可得到Ud和零两 种电平。
uo负半周,让V2保持 通,V1 ,V4保持断, 只控制V3。uo可得-Ud 和零两种电平。
图6-4 单相桥式PWM逆变电路
6-11
6.2.1 计算法和调制法
(2)调制原理
设调制信号ur为正弦波;载波信号uc为三角波。 利用ur和uc的交点时刻控制IGBT的通断。
ur正半周,V1保持通,V2保持断。
和单极性PWM控制方式对应,也是 在ur和uc的交点时刻控制IGBT的通断。
在ur的半个周期内,三角波载波不再是单 极性,而是有正有负,所得PWM波也有 正有负,其幅值只有±Ud两种电平。
u ur uc
ur正负半周,对各开关器件的控制规律相 同。
当ur >uc时,给V1和V4导通信号,给V2 和V3关断信号。 如io>0,V1和V4通,如io<0,VD1和V3导通信号,给V1 和V4关断信号。 如io<0,V2和V3通,如io>0,VD2和 VD3通,uo=-Ud 。
6-14
6.2.1 计算法和调制法
4)双极性PWM控制方式(三相桥逆变)
三相的PWM控制 公用三角波载波uc 三相的调制信号urU、 urV和urW依次相差 120°
图6-7 三相桥式PWM型逆变电路
微机原理与接口技术_第6章 IO接口
三、I/O端口编址 (续) 2.I/O独立编址(续)
缺点: 专用I/O指令增加指令系统复杂性,且I/O指 令类型少,程序设计灵活性较差; 要求处理器提供MEMR#/MEMW#和IOR#/IOW#两 组控制信号,增加了控制逻辑的复杂性。
三、I/O端口编址 (续)
PC系列微机I/O端口访问 1.I/O端口地址空间
程序控制方式
程序控制方式是指CPU与外设之间的数据传送由程序 控制完成。 程序控制方式又分为无条件传送和条件传送两种 1.无条件传送方式(同步传送) 特点:输入时假设外设已准备好,输出时假设外设 空闲。 要求:输入接口加缓冲器,输出接口加锁存器。 应用:对简单外设的操作。
1. 无条件传送方式(同步传送) 输入接口的设计要求:
寻 址 确定输入端口地址 AB、M/ IO、ALE、DT/R 等待数据输入 等待数据输入 输入缓冲器 读入数据 输入缓冲器 DB CPU
一、 I/O 接口的功能 (续)
3. I/O接口应具有的功能(解决的方案)
1) 设置数据缓冲器以解决两者速度差异所带来的 不协调问题; 输出时: CPU DB 锁存器 输出设备数据线
以上三类信息分别通过各自的寄存器和相应的控制逻辑 来完成信息的传送。通常将这类寄存器和相应的控制逻辑称 为I/O端口。CPU与一个外设之间通常有三个端口。数据端口 (输入/输出);状态端口;控制端口。
二、I/O接口的一般结构 (续) I/O接口组成:接口由接口硬件和接口软件组成。 1.接口硬件
接口
这类接口面对总线,因此要使用三态输出器件; 对于输入信号有记忆功能的一般使用三态门; 对于输入信号无记忆功能的一般还要增加锁存功能;
1. 无条件传送方式(同步传送)
第6章PWM技术

由电机学,三相对称正 弦供电时: 总向量恒幅恒速旋转 (电)角速度:w 2f s 代表空间正弦分布且圆 转磁场,u s、es、is 是引用量
26
• 三相交流的空间向量
n=0:15;x=2*pi*n/16;a=2*pi/3;
v=cos(x)+cos(x+a)*exp(j*a) +cos(x-a)*exp(-j*a); plot(v)
16
除计算法和调制法外,还有 空间向量法 跟踪控制方法
17
6.2.2 异步调制和同步调制
载波比N = fc / fo----模拟uo一个周波的脉冲数 1) 异步调制----fc不变, N随fo变 载波与调制波不同步 N常≠整数 对称性差。 当fo较低时,N大------低频性能好。
当fo增高时,N小------高频差
u
ω1
u2Tc
32
空间矢量磁链控制 SVPWM
其它区域也有相应控制规则
SVPWM用电压向量u控制Ψ 沿折线围线,并走走停停逼近圆 开关频率越高,线元usTc越短 Ψ圆越准
33
空间矢量磁链控制 SVPWM
三电平逆变器 电压向量us更多 按ΔΨ=Ψ* - Ψ --用最佳us控制 Ψ圆更准
34
SVPWM波形特点
31
空间矢量磁链控制 SVPWM
--仿闭环控制算法 控制方程ΔΨs “=” usTc 按Ψ转向超前90度建u参考轴 u2 用u轴前后电压向量控制Ψ 例如图 矢量 作用 应用条件 u1 u1 正转增幅 Ψ滞后欠幅 u2 正转减幅 滞后超幅 u7,8 停转等待 超前 Ψ 例:Ψ滞后欠幅,用u1 u1Tc Ψ滞后超幅,用u2 Ψ超前,用u7,8 注”相邻原则”:u1u8; u2u7;可减少开关动作
机车微机控制系统概述

第六章机车微机控制系统第一节机车微机控制系统概述一、微机控制系统的基本概念和特点微机控制系统一般都具有三个要素,即控制对象、信息处理机构、执行机构控制目标;信息处理机构将目标值和实际情况进行比较、运算,给执行机构控制对象出动作指令;执行机构根据接收到的动作指令进行调节,以求达到或尽员接近控制目标。
图6一1所示为控制系统示意图。
控制系统有开环控制和闭环控制之分。
在开环控制中,输出信号不反馈到信息处理机构;在闭环控制中,信息处理机构是根据给定目标与输出反馈信号的差值来进行控制的。
毫无疑问,闭环控制比开环控制易于稳定并具有较高的精度。
一个复杂的控制系统可以由多个闭环系统组合而成,如速度环、电流环、电压环等。
例如,55型电力机车微机控制系统,不论是在正常工况下还是在故障工况下,都采用闭环控制,由系统自动调节,从而减轻了司机的劳动强度,简化了司机的操作程序。
在电力机车上,微机的控制目标主要是电机电枢电流和机车速度,信息处理机构是微型计算机,执行机构是晶闸管变流装置。
即微机根据司机给定的手柄级位以及实际机车速度来调节晶闸管的触发角,从而使机车稳定运行在司机希望的工况。
我国558型电力机车是国产电力机车中首次采用微机控制的车型。
以往的机车都采用模拟控制,如553、554改和55:型机车等,它们都是采用以运算放大器为基础的模拟控制方式。
随着电力电子技术、半导体集成技术的发展和控制要求的提高,用微机控制来取代模拟控制是牵引动力技术发展的必由之路,它标志着机车控制技术水平上升到了新阶段。
与膜拟控制相比,微机控制有以下特点:(l)微机控制系统不仅需要有硬件,而且必须有软件,而模拟控制中左右硬件。
硬件是指各种能完成一定功能的电子插件,是看得见摸得着的。
软件是指为实现一定功能而*制的程序,它通常存储在断电也能保存的器件(如 EPROM、ROM)中,是一串由0和1构成的代码。
软件又分系统软件和应用软件。
对用户来讲,主要是根据需要编制应用软件。
《微机原理与接口技术》教学课件 第6章

6.2 随机存取存储器
2 动态RAM 2164的工作过程
① 将要读出单元的行地 址送到地址线A0~A7上, RAS 信号有效时,在下 降沿将地址锁存在行地 址锁存器中。
② 将要读出单元的列地 址 送 到 地 址 线 A0 ~ A7 上 , CAS 信号有效时,在下降 沿将地址锁存在列地址 锁存器中。
目录 CONTENTS
存储器入门 随机存取存储器
只读存储器 高速缓冲存储器
外部存储器
3
引子
计算机之所以能自动、连续地工作,是因为采用了存储程序的原理。计算机中的所有程序和数 据都存放在存储器中,存储器是计算机必不可少的组成部件之一。存储器的性能对整个计算机 系统的性能起着至关重要的作用。本章主要介绍存储器的分类、结构和主要性能指标,并通过 典型的存储器芯片来介绍存储器的工作原理及与CPU的连接方法。
6.1 存储器入门
连续两次读写操作之间所需的最短时间间隔称为存储周期。存储器每秒钟可读写的 数据量称为存储器带宽或数据传输速率,单位为bps(或bit/s)。存取周期和存储器带宽 也常作为存储器的性能指标。
提示
6.2 随机存取存储器
随机存取存储器(Random Access Memory,RAM)也称随机读/写存储器或随机存储器,它既可以直接 从任何一个指定的存储单元中读出数据,也可以将数据写入任何一个指定的存储单元中。
6.1.2 存储器的性能指标
存储器容量:存储器中所包含存储单元的总数,单位是字节(B)。存储 器容量越大,存储的信息越多,计算机的性能也就越强。
01
02
存取时间:存储器完成一次读写操作所需的时间,单位为ns(纳秒,
1 ns=10-9 sБайду номын сангаас。
课件 第六章 计算机控制系统的抗干扰技术

2 常用的接地方法(2) 常用的接地方法(2)
(2) 模拟地和数字地的连接
6.3 系统供电及接地技术
2 常用的接地方法(3) 常用的接地方法(3)
(3) 主机外壳接地
6.3 系统供电及接地技术
外壳接地,机壳浮空
2 常用的接地方法(4) 常用的接地方法(4)
(4) 多机系统的接地
过程 通道 主机 打印机
1 微机控制系统中的地线
(1)数字地,或逻辑地。 (2) 模拟地。 (3) 安全地。又称为保护 地或机壳地,屏蔽地。 (4) 系统地。 (5) 直流地。 (6) 交流地。
2 常用的接地方法(1) 常用的接地方法(1)
(1) 一点接地和多点接地
6.3 系统供电及接地技术
图6.15 串联一点接地
图6.16 并联一点接地
4
采用具有高共模抑制比的仪表
采用具有高共模抑制比的仪表放大器作 为输入放大器: 为输入放大器 : 仪表放大器具有共模抑 制能力强、输入阻抗高、漂移低、增益 可调等优点,是一种专门用来分离共模 干扰与有用信号的器件。
6.2 硬件抗干扰技术
6.2.2
串模干扰的抑制
1. 在输入回路中接入模拟滤波器 使用双积分式A/D转换器 A/D转换器 2. 使用双积分式A/D转换器 3. 采用双绞线作为信号线 4. 电流传送 5. 对信号提早处理 选择合理的逻辑器件来抑制。 6. 选择合理的逻辑器件来抑制。
6.2 硬件抗干扰技术
3. 采用双绞线作为信号线
若串模干扰和被测信号的频率相当, 则很难用滤波的方法消除。此时,必须采 用其它措施,消除干扰源。通常可在信号 源到计算机之间选用带屏蔽层的双绞线或 同轴电缆,并确保接地正确可靠。采用双 绞线作为信号引线的目的是减少电磁。双 绞线能使各个小环路的感应电势相互抵消。 一般双绞线的节距越小抗干扰能力越强。
微型计算机控制 第6章 数字滤波技术
6 .1 .7
复合数字滤波
这种滤波方法的原理可由下式表示。 若 X(1)≤X(2)≤…≤X(N), 3≤ N≤14
则
X (2) X (3) X ( N 1) Y (k )
N 2
1 N 1 X (i ) (6-10) N 2 i 2
式(6-10)也称作防脉冲干扰的平均值滤波,它的程序设计方 法读者可根据以前的知识自行设计。 此外,也可采用双重滤波的方法,即把采样值经过低通滤波后, 再经过一次高通滤波,这样,结果更接近理想值,这实际上相 当于多级RC滤波器。
微机控制技术
6.1.8
各种数字滤波性能的比较
以上介绍了七种数字滤波方法,读者可根据需要 设计出更多的数字滤波程序。每种滤波程序都有其各 自的特点,可根据具体的测量参数进行合理的选用。
微机控制技术
6.1.8
各种数字滤波性能的比较
1. 滤波效果 (1)变化比较慢的参数,如温度,用程序判断滤波及 一阶滞后滤波方法。 (2)变化比较快的脉冲参数,如压力、流量等,则可 选择算术平均和加权平均滤波法,特别是加权平均 滤波法更好。 (3)要求比较高的系统,需要用复合滤波法。 (4)在算术平均滤波和加权平均滤波中,其滤波效果 与所选择的采样次数N有关。N越大,则滤波效果越 好,但花费的时间也愈长。 (5)高通及低通滤波程序是比较特殊的滤波程序,使 用时一定要根据其特点选用。
C
i0
n 1
i
1
微机控制技术
6.1.4
加权平均值滤波
式中C0、Cl、…、Cn-1为各次采样值的系数,它体现 了各次采样值在平均值中所占的比例,可根据具体情况 决定。一般采样次数愈靠后,取的比例愈大,这样可增 加新的采样值在平均值中的比例。这种滤波方法可以根 据需要突出信号的某一部分,抑制信号的另一部分。
第6章 计数器和定时
+1计数器
溢出
中断
控制 开关
计数原理——定时器 单片机内部脉冲每输入一个脉冲,计数器加1,当 加到计数器各位都为1时,再输入一个脉冲,计数 器各位全变为0,溢出,中断标志置1(SFR中 TCON的TF0、TF1),从而向CPU申请中断。 由预置计数值就可以算出从加1计数器启动到计满 溢出所需的时间,即定时时间。 8位28 = 256;13位213 = 8192;16位 216 = 65536
可编程定时/计数器。
6.1 定时/计数技术概述
在单片微机应用系统中,常常会需要定时或计数,通常采用以 下三种方法来实现: 1.硬件法 硬件定时功能完全由硬件电路完成,不占用 CPU 时间。但 当要求改变定时时间时,只能通过改变电路中的元件参数来实 现,很不灵活。 2.软件法 软件定时是执行一段循环程序来进行时间延时,优点是无 额外的硬件开销,时间比较精确。但牺牲了CPU的时间,所以软 件延时时间不宜长,而在实时控制等对响应时间敏感的场合也 不能使用。
8E
TF0
8D
TR0
8C
IE1
8B
IT1
8A
IE0
89
IT0
88
• 8位寄存器,可位寻址 • 低4位用于外部中断INT0、INT1控制 • 高4位用于T0、T1控制
3、定时/计数器控制寄存器TCON
TCON
位地址
TF1
8F
TR1
8E
TF0
8D
TR0
8C
IE1
8BIT18A NhomakorabeaIE0
89
IT0
88
• TR0(TCON.4):T0的运行控制位 当GATE=0时,TR0=0则T0停止运行;TR0=1时 T0允许运行 • TF0(TCON.5):T0溢出兼中断申请标志
微型计算机原理与接口技术第六章课后答案pdf
第六章1. CPU与外设交换数据时,为什么要通过I/O接口进行?I/O接口电路有哪些主要功能?答:CPU和外设之间的信息交换存在以下一些问题:速度不匹配;信号电平不匹配;信号格式不匹配;时序不匹配。
I/O接口电路是专门为解决CPU与外设之间的不匹配、不能协调工作而设置的,处于总线和外设之间,一般应具有以下基本功能:⑴设置数据缓冲以解决两者速度差异所带来的不协调问题;⑵设置信号电平转换电路,来实现电平转换。
⑶设置信息转换逻辑,如模拟量必须经 A/D变换成数字量后,才能送到计算机去处理,而计算机送出的数字信号也必须经D/A变成模拟信号后,才能驱动某些外设工作。
⑷设置时序控制电路;⑸提供地址译码电路。
2. 在微机系统中,缓冲器和锁存器各起什么作用?答:缓冲器多用在总线上,可提高总线驱动能力、隔离前后级起到缓冲作用,缓冲器多半有三态输出功能。
锁存器具有暂存数据的能力,能在数据传输过程中将数据锁住,然后在此后的任何时刻,在输出控制信号的作用下将数据传送出去。
3. 什么叫I/O端口?一般的接口电路中可以设置哪些端口?计算机对I/O端口编址时采用哪两种方法?在8086/8088CPU中一般采用哪些编址方法?答:在CPU与外设通信时,传送的信息主要包括数据信息、状态信息和控制信息。
在接口电路中,这些信息分别进入不同的寄存器,通常将这些寄存器和它们的控制逻辑统称为I/O 端口。
一般的接口电路中可以设置数据端口、状态端口和命令端口。
计算机对I/O端口编址时采用两种方法:存储器映像寻址方式、I/O单独编址方式。
在8086/8088CPU中一般采用I/O单独编址方式。
4. CPU与外设间传送数据主要有哪几种方式?答:CPU与外设间的数据传送方式主要有:程序控制方式、中断方式、DMA方式。
程序控制传送方式:CPU与外设之间的数据传送是在程序控制下完成的。
⑴无条件传送方式:也称为同步传送方式,主要用于对简单外设进行操作,或者外设的定时是固定的或已知的场合。
微机原理第6章 8086或8088微机系统的功能组件
6.3 中断控制器Intel 8259A 6.3.1 概述
6.3.2 Intel 8259A的功能
6.3.3 8259A的结构 6.3.4 8259A芯片的工作方式
6.3.5 8259A在IBM PC/XT机的外部中断系统
中的应用
6.4 可编程DMA控制器DMAC 8237A 6.4.1 概述 6.4.2 DMA控制器8237A
CLK0 GATE0 OUT0
数
读写 控制逻辑
据 总 线
计数器 1
CLK1 GATE1 OUT1 CLK2 GATE2 OUT2
计数器 2
6.2 可编程定时/计数器 8253/8254
6.2.3 8253的工作方式
根据对工作方式寄存器中控制字M2、M1和M0的不同 设置,8253可以工作于6种不同的工作方式。表6.2列出了 8253 不同工作模式下效果。
6.2 可编程定时/计数器 8253/8254
表6.2 8253 不同工作模式下效果
工作方式 0 1 2 3 工作效果 OUT的输出
计数器初值装 载特征
重装载
GATE的作用 低或变为低 禁止计数 — ①禁止计数 ②立即使输出为高 ①禁止计数 ②立即使输出为高 禁止计数 — 上升沿 — 高电平 允许计数 — 允许计数 允许计数
6.2 可编程定时/计数器 8253/8254
8253 的内部结构逻辑见图 6.3 。它主要由 4 个基本的
单元组成,它们是:
•数据总线缓冲器单元 •读写控制逻辑单元
•控制字寄存器单元
•3个计数器逻辑单元。
6.2 可编程定时/计数器 8253/8254
D7~D0
数据总线 缓冲器
计数器 0
内 部
微机原理第六章 输入输出和中断技术 part 2 (2)

中断处理的一般过程
6.4.3 8088/8086中断系统
8086/8088为每个中断源分配 一个中断类型码(中断向量码),其取值范围为 0~255,实际可处理56种中断。其中包括软件中断,系统占用的中断,已经开放 给用户使用的中断。所有中断又可分为两大类:内部中断和外部中断。
内部中断
6.4.2 中断处理的一般过程
1. 中断请求 2. 中断源识别及中断判优 3. 中断响应 4. 中断处理(服务) 5. 中断返回
1. 中断请求 ➢ INTR中断请求信号应保持到中断被处理为止 ➢ CPU响应中断后,中断请求信号应及时撤销
2. 中断源识别 ➢ 软件判优:由软件来安排中断源的优先级别。顺序查询中断请求,先查询的
➢ (4)能向存储器或外设发出读/写命令。 ➢ (5)能决定传送的字节数,并判断DMA传送是否结束。 ➢ (6)在DMA过程结束后,能向CPU发出DMA结束信号,将总线控制权交
还给CPU。
2. DMA控制器的工作过程 ➢ (1)当外设准备好,可以进行DMA传送时,外设向DMA控制器发出
“DMA传送请求”信号DRQ ➢ (2)DMA控制器收到请求后,向CPU发出“总线请求”信号HOLD ➢ (3)CPU在完成当前总线周期后会立即发出HLDA信号,对HOLD信号进
➢ (2)单步中断——1型中断,标志寄存器中有一位陷阱标志TF。 ➢ (3)断点中断——3型中断,专用于设置断点的指令INT 3,用于程序中设
置断点来调试程序。
➢ (4)溢出中断——4型中断,在算数指令的执行过程发出溢出 ➢ (5)用户自定义的软件中断——n型中断,执行中断指令INT n引起内部中
断。
需要时,CPU回到原来被中断的地方继续执行自己的程序。 优点: ➢ CPU效率高,实时性好 缺点 ➢ 程序编制相对较为复杂
第6章 外部存储设备
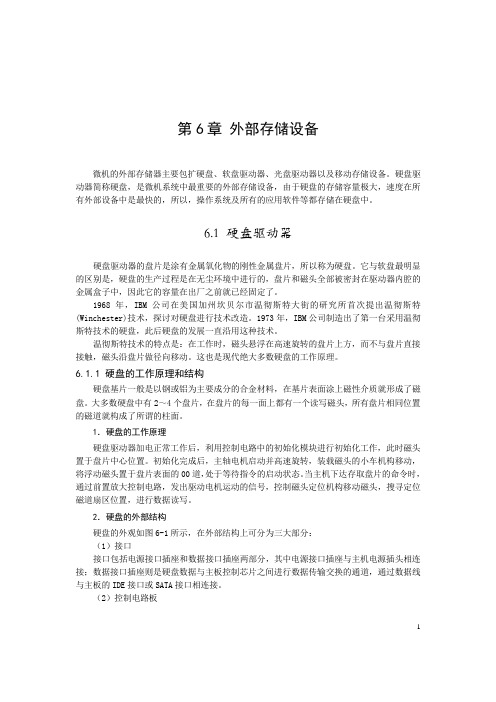
第6章外部存储设备微机的外部存储器主要包扩硬盘、软盘驱动器、光盘驱动器以及移动存储设备。
硬盘驱动器简称硬盘,是微机系统中最重要的外部存储设备,由于硬盘的存储容量极大,速度在所有外部设备中是最快的,所以,操作系统及所有的应用软件等都存储在硬盘中。
6.1 硬盘驱动器硬盘驱动器的盘片是涂有金属氧化物的刚性金属盘片,所以称为硬盘。
它与软盘最明显的区别是,硬盘的生产过程是在无尘环境中进行的,盘片和磁头全部被密封在驱动器内腔的金属盒子中,因此它的容量在出厂之前就已经固定了。
1968年,IBM公司在美国加州坎贝尔市温彻斯特大街的研究所首次提出温彻斯特(Winchester)技术,探讨对硬盘进行技术改造。
1973年,IBM公司制造出了第一台采用温彻斯特技术的硬盘,此后硬盘的发展一直沿用这种技术。
温彻斯特技术的特点是:在工作时,磁头悬浮在高速旋转的盘片上方,而不与盘片直接接触,磁头沿盘片做径向移动。
这也是现代绝大多数硬盘的工作原理。
6.1.1 硬盘的工作原理和结构硬盘基片一般是以钢或铝为主要成分的合金材料,在基片表面涂上磁性介质就形成了磁盘。
大多数硬盘中有2~4个盘片,在盘片的每一面上都有一个读写磁头,所有盘片相同位置的磁道就构成了所谓的柱面。
1.硬盘的工作原理硬盘驱动器加电正常工作后,利用控制电路中的初始化模块进行初始化工作,此时磁头置于盘片中心位置。
初始化完成后,主轴电机启动并高速旋转,装载磁头的小车机构移动,将浮动磁头置于盘片表面的00道,处于等待指令的启动状态。
当主机下达存取盘片的命令时,通过前置放大控制电路,发出驱动电机运动的信号,控制磁头定位机构移动磁头,搜寻定位磁道扇区位置,进行数据读写。
2.硬盘的外部结构硬盘的外观如图6-1所示,在外部结构上可分为三大部分:(1)接口接口包括电源接口插座和数据接口插座两部分,其中电源接口插座与主机电源插头相连接;数据接口插座则是硬盘数据与主板控制芯片之间进行数据传输交换的通道,通过数据线与主板的IDE接口或SATA接口相连接。
微型计算机控制技术答案

CALL DELAY
INC AH
DEC DX
LOOP NEXT
RET
DOUT ENDP
其中DELAY是一段延时程序。
第四章(常规及复杂控制技术)作业
答:工业控制机主要由以下几部分组成:
1、硬件组成:
(1)主机板:进行必要的数值计算,逻辑判断,数据处理。
(2)内部总线:内部各部分进行信息传递的公共通道,是一组信号线的集合。
(3)外部总线:与其他计算机和智能设备进行信息传送的公共通道。
(4)人--机接口
DEC DX
NOSC: IN AL , DX
TEST AL , 80H
JNZ NOSC //
NOEOC: IN AL ,DX
TEST AL ,80H
JZ NOEOC // EOC=0 ,等待
为平衡电容。
无源变换电路见书本上第31页(图2.18):
极性电容C起滤波的作用;
二极管D起限幅保护作用(当输出电压大于5V时,D导通减少流过的电流从而降低上的电压,保证输出不超过5V);
2.6 什么是采样过程?量化,孔径时间?
答:采样过程:按一定的时间间隔T,把时间上连续和幅值上也连续的模拟信号转成在时刻0,T,2T,、、、、、、kT的一连串脉冲输出信号的过程称为采样过程。
MOV DX , 200H
MOV AL , 6DH
OUT DX , AL
HLT
2.12 请分别画出D/A转换器的单极性和双极性电压输出电路,并分别推出输出电压与输入数字两之间的关系式。
解:D/A转换器的单极性和双极性输出电路见书本上第44页(图2.33)。
微机原理与接口技术第六章_8259A练习题与答案

中断技术和中断控制器8259A练习题及答案一、填空题1.8088微处理器最多能处理256种不同类型的中断。
2.8088系统的中断向量表位于从内存地址 00000H 开始,占1K字节存储单元。
3.8088CPU响应INTR中断时,将PSW(或标志寄存器内容)和断点(或CS:IP)进堆栈保存。
4.8259A可管理8级优先级中断源,通过级联,最多可管理 64 级优先级中断源。
5.若8259A的IRR(中断请求寄存器)的内容为10H,说明IR4请求中断。
二、选择题6.8088CPU的标志寄存器中IF=1时,表示允许CPU响应______中断。
CA.内部中断B.外部中断C.可屏蔽中断D.不可屏蔽中断7.CPU在响应中断时,保存断点是指______。
DA.将用户设置的程序指令地址入栈保存B.将中断服务程序的入口地址入栈保存C.将程序状态字PSW入栈保存D.将返回地址即程序计数器PC(CS:IP)的内容入栈保存8.8088的中断向量表用于存放______。
BA.中断类型号B.中断服务程序的入口地址C.中断服务程序的返回地址D.断点地址三、判断题9.8086的可屏蔽中断的优先级高于不可屏蔽中断。
[ ] ×10.通常8259A芯片中的IR0优先级最低,IR7的优先级最高。
[ ]×11.在8088系统中,所谓中断向量就是中断服务程序入口地址。
[ ] √四、简答题12.CPU响应INTR中断的条件是什么?答:(1)INTR信号为有效电平(2)当前指令执行完毕(3)CPU开中断(IF=1)(4)没有更高级的请求(RESET , HOLD ,NMI)13.一般CPU响应中断时自动做哪些工作? 8088CPU呢?答:一般CPU在响应中断时,关中断,保存断点,识别中断源,找到中断服务程序入口地址,转入中断服务程序。
8080CPU在响应中断时,首先把PSW(或标志寄存器内容)入栈保存,其余同一般CPU.14.8088CPU在执行中断返回指令IRET时,执行什么操作?答:(1)弹出断点送CS:IP(2)弹出PSW送标志寄存器15.中断控制器8259A中下列寄存器的作用是什么?(1) IRR (中断请求寄存器) :保存中断源的中断请求(2) IMR (中断屏蔽寄存器) :屏蔽/允许中断源请求中断,由程序写入,1为屏蔽,0为允许(3) ISR (中断服务寄存器): 记录CPU正在为哪些中断源服务(4) IVR (中断向量寄存器): 保存中断向量号16、初使化时设置为非自动结束方式,那么在中断服务程序将结束时必须设置什么操作命令?如果不设置这种命令会发生什么现象?答案:当中断服务程序将结束时,必须发0CW2=20H为中断结束命令,执行此命令即撤消正在服务的中断请求和服务标志;否则,即使返回主程序但未退出此中断,造成中断响应的混乱。
第6章(304)
第6章 输入/输出接口技术
(3) 开关量。开关量可表示两个状态,如开关的闭合和断开、 电机的运转和停止、阀门的打开和关闭等,这样的量只要用一 位二进制数表示就可以了。
以上数据信息一般是由外设通过接口芯片输入给系统的。 在输入过程中,数据信息由外设经过外设和接口之间的数据线 进入接口,再经过系统的数据总线送给CPU。在输出过程中, 数据信息从CPU经过数据总线进入接口,再通过接口和外设之 间的数据线送到外设。
第6章 输入/输出接口技术
6.1.6 简单的I/O接口图6-2 三态门电路 不同的I/O设备,所需采用的I/O接口电路复杂程度可能相
差甚远,但分解到最基本的功能,接口中应用最多的是三态缓 冲器和数据锁存器。
1.三态缓冲器 所谓三态,是指电路输出端具有三种稳态,即1态(高电平 状态),0态(低电平状态)和第三态(高阻态或称浮空态)。三态门 电路的逻辑符号如图6-2所示。
6.1.5 端口及编址方式 1.端口 所谓端口,是指I/O接口(包括芯片和控制卡)中供CPU直接
存取访问的那些寄存器或某些硬件特定电路。一个I/O接口总要 包括若干个端口,除常见的数据端口、命令端口和状态端口外, 还有特殊用途的端口,如方式控制端口、操作结果端口和地址 索引端口等。端口的多少及相应的功能完全取决于与I/O接口所 关联的I/O设备。但需要指出的是,一个端口可设定为只读(一 般为状态和结果信息)、读写(一般为数据或命令信息)或只写(读 出无意义,如方式控制、命令参数信息)。这些属性是在设计 I/O接口功能时决定的,用户不能改变。
信息、状态信息和控制信息3种类型。 1.数据信息 CPU和外围设备交换的基本信息就是数据,数据通常为8位
或16位。数据信息大致分为以下3种类型。 (1) 数字量。数字量是指由键盘、磁盘、扫描仪等输入设备
《电力电子技术》(第六七八章)习题答案

第6章 PWM 控制技术1.试说明PWM 控制的基本原理。
答:PWM 控制就是对脉冲的宽度进行调制的技术。
即通过对一系列脉冲的宽度进行调制,来等效地获得所需要波形(含形状和幅值)。
在采样控制理论中有一条重要的结论:冲量相等而形状不同的窄脉冲加在具有惯性的环节上时,其效果基本相同,冲量即窄脉冲的面积。
效果基本相同是指环节的输出响应波形基本相同。
上述原理称为面积等效原理以正弦PWM 控制为例。
把正弦半波分成N 等份,就可把其看成是N 个彼此相连的脉冲列所组成的波形。
这些脉冲宽度相等,都等于π/N ,但幅值不等且脉冲顶部不是水平直线而是曲线,各脉冲幅值按正弦规律变化。
如果把上述脉冲列利用相同数量的等幅而不等宽的矩形脉冲代替,使矩形脉冲的中点和相应正弦波部分的中点重合,且使矩形脉冲和相应的正弦波部分面积(冲量)相等,就得到PWM 波形。
各PWM 脉冲的幅值相等而宽度是按正弦规律变化的。
根据面积等效原理,PWM 波形和正弦半波是等效的。
对于正弦波的负半周,也可以用同样的方法得到PWM 波形。
可见,所得到的PWM 波形和期望得到的正弦波等效。
2.设图6-3中半周期的脉冲数是5,脉冲幅值是相应正弦波幅值的两倍,试按面积等效原理计算脉冲宽度。
解:将各脉冲的宽度用i(i =1, 2, 3, 4, 5)表示,根据面积等效原理可得1=m5m 2d sin U t t U ⎰πωω=502cos πωt - =(rad)=(ms)2=m525m 2d sin U t t U ωϖππ⎰=5252cos ππωt -=(rad)=(ms)3=m5352m 2d sin U t t U ωϖππ⎰=53522cos ππωt -=(rad)=(ms)4=m5453m 2d sin U t t U ωϖππ⎰=2=(rad)=(ms)5=m54m2d sin U tt Uωϖππ⎰=1=(rad)=(ms)3. 单极性和双极性PWM 调制有什么区别三相桥式PWM 型逆变电路中,输出相电压(输出端相对于直流电源中点的电压)和线电压SPWM 波形各有几种电平答:三角波载波在信号波正半周期或负半周期里只有单一的极性,所得的PWM 波形在半个周期中也只在单极性范围内变化,称为单极性PWM 控制方式。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第6章 数字控制器的模拟化设计
6.2 PID控制及其作用 控制及其作用
第6章 数字控制器的模拟化设计
e
(1)比例调节器
控制规律: 控制规律:
u ( t ) = K P e ( t ) + u0
其中: 为比例系数; 其中: K P 为比例系数;
t0
t
u
u0 为控制量的基准。
比例调节的特点: 比例调节的特点:比例调节器对于 偏差是即时反应,偏差一旦产生, 偏差是即时反应,偏差一旦产生, 调节器立即产生控制作用使被控量 朝着减小偏差的方向变化, 朝着减小偏差的方向变化,控制作 用的强弱取决于比例系数。 用的强弱取决于比例系数。只有当 偏差发生变化时,控制量才变化。 偏差发生变化时,控制量才变化。
第6章法的程序设计 .PID算法的程序设计 1.位置式 位置式PID算法的程序设计 位置式 算法的程序设计
前面得到的位置式PID调节器表达式,使用比例、积分、 调节器表达式,使用比例、积分、 前面得到的位置式 调节器表达式 微分三个系数,分三项表示,表达式为: 微分三个系数,分三项表示,表达式为:
在编写计算程序时,积分项是在前面( ) 在编写计算程序时,积分项是在前面(k-1)次的求和 基础上累加,如下式: 基础上累加,如下式:
第6章 数字控制器的模拟化设计
2.增量式 增量式PID算法的程序设计 增量式 算法的程序设计
前面得到的增量PID调节器表达式,使用比例、积分、 调节器表达式,使用比例、积分、 前面得到的增量 调节器表达式 微分三个系数,分三个增量项来表示,表达式为: 微分三个系数,分三个增量项来表示,表达式为:
缺点:降低响应速度。 缺点:降低响应速度。
t
第6章 数字控制器的模拟化设计
(3)比例微分调节器
控制规律: 控制规律:
de(t ) u ( t ) = K P [ e ( t ) + Td ] + u0 d(t )
其中: 为微分时间常数。 其中: Td 为微分时间常数。
e
1 1 0 t0 t
u
微分调节的特点: 微分调节的特点:在偏差出现或变化的 瞬间, 瞬间,产生一个正比于偏差变化率的控 制作用, 制作用,它总是反对偏差向任何方向的 变化,偏差变化越快,反对作用越强。 变化,偏差变化越快,反对作用越强。 故微分作用的加入将有助于减小超调, 故微分作用的加入将有助于减小超调, 克服振荡,使系统趋于稳定。 克服振荡,使系统趋于稳定。它加快了 系统的动作速度,减小调整时间, 系统的动作速度,减小调整时间,从而 改善了系统的动态性能。 改善了系统的动态性能。
6.1 概述
该图为计算机控制系统的一种典型结构, 该图为计算机控制系统的一种典型结构 一.计算机控制系统的优点 1)1台计算机可控制多个回路。 台计算机可控制多个回路。 2)算法灵活,易于修改。 算法灵活,易于修改。 3)可靠性高,维护简单。 可靠性高,维护简单。 4)提高质量、产量、效益、自动化程度,改善劳动条件。 提高质量、产量、效益、自动化程度,改善劳动条件。
控制效果图
第6章 数字控制器的模拟化设计
6.4 PID算法的改进
采用积分分离法的位置式PID算法程序流程如图6-13所示。
积分分离法PID程序 计算偏差e(k) 根据式(6- 11)计算比例项up(k)及微分项uD(k) | e(kT) | < ε? Y 计算积分项uI(k) N
各项求和计算u(k) 子程序返回 图6-13 积分分离的PID算法流程图
故 u(k)
式中: 式中:
第6章 数字控制器的模拟化设计
(3)两种标准 )两种标准PID控制算法比较 控制算法比较
r
+
e
−
u
y
(a)位置型 )
r
+
−
e
PID
∆u
u
y
(b) 增量型 ) 两种PID PID控制算法实现的闭环系统 图6 两种PID控制算法实现的闭环系统
第6章 数字控制器的模拟化设计
算法比较 :
第6章 数字控制器的模拟化设计
标准PID控制的积分作用
第6章 数字控制器的模拟化设计
6.4 PID算法的改进 算法的改进
1.关于积分“饱和”作用的抑制 关于积分“饱和” 关于积分
产生原因: 产生原因: 控制系统在突加给定信号、突加负载等过渡过程中, 控制系统在突加给定信号、突加负载等过渡过程中,会出现较大的 偏差,因此,积分项的比例、积累值均会很大, 整个输出值会很大, 偏差,因此,积分项的比例、积累值均会很大,PID整个输出值会很大, 整个输出值会很大 达到后续放大执行环节的输入信号最大限制范围, 饱和”状态。 达到后续放大执行环节的输入信号最大限制范围,即“饱和”状态。如晶 闸管达到最小控制角、电动阀门开到最大。 在自动调节过程中, 闸管达到最小控制角、电动阀门开到最大。 在自动调节过程中,输出会 逐渐变小,偏差也在变小、比例项会随之变小,但积分项不能很快变化, 逐渐变小,偏差也在变小、比例项会随之变小,但积分项不能很快变化, 仍会输出很大的数值, 如果继续保持大的输出, 仍会输出很大的数值,PID如果继续保持大的输出,会使系统输出增大后 如果继续保持大的输出 又超出希望值很多,过渡过程出现大的波动。 又超出希望值很多,过渡过程出现大的波动。 解决办法: ) 解决办法: 1)遇限削弱积分法 程序设计在输出达到饱和之后,正的积分项应不再累计, 程序设计在输出达到饱和之后,正的积分项应不再累计,而只累积 达到饱和之后 负的积分项,只允许负向积分,不允许正向积分, 负的积分项,只允许负向积分,不允许正向积分,使调节器在完成满值运 行后,迅速退出饱和。 行后,迅速退出饱和。
umin ≤ u ≤ umax
& & u ≤ umax
其变化率也有一定的限制范围, 其变化率也有一定的限制范围,即
如果计算机给出的控制量在所限制范围内, 如果计算机给出的控制量在所限制范围内, 能得到预期结果;若超出此范围, 能得到预期结果;若超出此范围,实际执行的控制 量就不再是计算值,将得不到期望的效果。 量就不再是计算值,将得不到期望的效果。这种效 应称为饱和效应。 应称为饱和效应。
第6章 数字控制器的模拟化设计
二.数字化调节器的常用控制方法 1)程序控制和顺序控制:按时间作事先约定的动作。 程序控制和顺序控制:按时间作事先约定的动作。 2)PID控制:对偏差进行P、I、D运算,输出运算结果。 PID控制:对偏差进行P 控制 运算,输出运算结果。 3)直接数字控制,这里指根据离散化后的差分方程编写 直接数字控制, 程序进行控制。 程序进行控制。 4)最优控制:应用最优化控制算法编写程序进行控制。 最优控制:应用最优化控制算法编写程序进行控制。 5)模糊控制:应用模糊控制算法编写程序进行控制。 模糊控制:应用模糊控制算法编写程序进行控制。
第6章 数字控制器的模拟化设计
(1)不完全微分的 )不完全微分的PID算法 算法
在上面介绍的标准PID算式中,当有阶跃信号输入时,微分项输出急 剧增加,容易引起调节过程的振荡,导致调节品质下降。为了克服这 一点,同时又要使微分作用有效,可以采用不完全微分的PID算法。 其基本思想是:仿照模拟调节器的实际微分调节,加入惯性环节,以 克服完全微分的缺点。(推导过程详见教材) 不完全微分的PID位置算式为:
第6章 数字控制器的模拟化设计
第6章 数字控制器的模拟化设计
第6章 数字控制器的模拟化设计 解决办法: ) 解决办法: 2)积分分离法 程序设计规定偏差的门限值,偏差较小时求 三项和; 程序设计规定偏差的门限值,偏差较小时求PID三项和; 三项和 较大时去掉积分项,只求PD两项和。 较大时去掉积分项,只求 两项和。 两项和
(1)增量型算法不需要做累加,计算误差或计 )增量型算法不需要做累加, 算精度问题,对控制量的计算影响较小。 算精度问题,对控制量的计算影响较小。而位置型 算法要用到过去误差的所有累加值, 算法要用到过去误差的所有累加值,容易产生大的 累加误差。 累加误差。 (2)增量型算法得出的是控制量的增量,误动 )增量型算法得出的是控制量的增量, 作影响小, 作影响小,而位置型算法的输出是控制量的全量输 误动作影响大。 出,误动作影响大。 (3)采用增量型算法,由于算式中不出现 u0 项, )采用增量型算法, 则易于实现手动到自动的无冲击切换。 则易于实现手动到自动的无冲击切换。
第6章 数字控制器的模拟化设计
6.3 PID算法的数字实现及程序控制 算法的数字实现及程序控制
一.PID算法的离散化 .PID算法的离散化
因此, 因此
简单离散化方法: 将连续的时间离散成时间序列, 用累加代替积分, 简单离散化方法: 将连续的时间离散成时间序列, 用累加代替积分, 用差分代替微分。 用差分代替微分。即:
第6章 数字控制器的模拟化设计
2.微分作用的改进 微分环节的引入对于干扰特别敏感。 微分环节的引入对于干扰特别敏感。当系统 中存在高频干扰时,会降低控制效果。 中存在高频干扰时,会降低控制效果。当被控量 突然变化时, 突然变化时,正比于偏差变化率的微分输出就很 但由于持续时间很短, 大。但由于持续时间很短,执行部件因惯性或动 作范围的限制, 作范围的限制,其动作位置达不到控制量的要求 这样就产生了所谓的微分失控(饱和)。 )。采 值,这样就产生了所谓的微分失控(饱和)。采 用不完全微分可以收到较好理想效果。 用不完全微分可以收到较好理想效果。
∫
t 0
e ( t ) dt ] + u 0
其中: 为积分时间常数。 其中: Ti 为积分时间常数。
1 1 0
t0
Kp
t
u
u0
0
Kp t0 Ti
图 6-4 PI调节器的阶跃响应
积分调节的特点: 积分调节的特点:调节器的 输出与偏差存在的时间有关。 输出与偏差存在的时间有关。 只要偏差不为零, 只要偏差不为零,输出就会 随时间不断增加, 随时间不断增加,并减小偏 直至消除偏差, 差,直至消除偏差,控制作 用不再变化, 用不再变化,系统才能达到 稳态。 稳态。