ADNB-2012中文资料
汞氨酸0.12N产品说明书

SAFETY DATA SHEETAccording to 29 CFR 1910.1200 Hazard Communication Standard 2012 (HazCom 2012)SECTION 1: IdentificationProduct identifierProduct name Sulfuric Acid .12NProduct number Q0687Recommended use and restrictions To be used in accordance with manufacturer instructions or under the direct guidance of the manufacturer.Manufacturer Taylor Technologies, Inc.31 Loveton CircleSparks, MD 21152Phone: (410) 472-4340Emergency phone: (800) 837-8548Distributor Intercon Chemical Company1100 Central Industrial DriveSt. Louis, MO 63110Phone: (800) 325-9218SECTION 2: Hazard(s) IdentificationPhysical hazards Corrosive to metals Category 1Health hazards Eye damage/irritation Category 1Skin corrosion/irritation Category 1C Environmental hazards Not currently regulated by OSHA. For additional information, refer to section 12 of the SDS.Label elementsHazard pictogramsSignal word DangerHazard statements May be corrosive to metals. Causes severe skin burns and serious eye damage.Precautionary statementsPrevention Do not breathe dust or mists. Wash skin thoroughly after handling. Wear protectivegloves/protective clothing/eye protection/face protection if contact is likely to occur. Keep onlyin original container.Response IF SWALLOWED: Rinse mouth. Do NOT induce vomiting. IF ON SKIN (OR HAIR):Immediately take off all contaminated clothing. Rinse skin with water. Wash contaminatedclothing before reuse. IF INHALED: Remove person to fresh air and keep comfortable forbreathing. Immediately call a physician or poison control center. IF IN EYES: Rinse cautiouslywith water for several minutes. Remove contact lenses if present and easy to do. Continuerinsing. Immediately call a physician or poison control center. Absorb spillage to preventmaterial damage.Storage Store in corrosive-resistant container with corrosive-resistant inner liner. Keep tightly capped.Store locked up. Store out of direct sunlight between 36°F–85°F.Disposal Dispose of contents/container in accordance with local/regional/national/internationalregulations.Hazards not otherwise classified Not applicableSECTION 3: Composition/Information on IngredientsMixtureChemical name Common name and synonyms CAS number % w/w Water Dihydrogen oxide 7732-18-5 80–100 Sulfuric acid Sulphuric acid; Dihydrogen sulfate 7664-93-9 0.1–1If inhaledRemove individual to fresh air. Seek medical advice/attention if breathing becomes difficult or if respiratory irritation develops.Give oxygen or artificial respiration if needed.In case of skin contactImmediately flush skin with plenty of water for at least 20 minutes. If clothing comes in contact with the product, the clothing should be removed and laundered before reuse. Seek medical advice/attention if irritation develops. Chemical burns must be treated by a physician.In case of eye contactImmediately flush eyes with plenty of water for at least 20 minutes. Remove contact lenses if present and easy to do. Continue rinsing. Call a physician or poison control center immediately.If swallowedCall a physician or poison control center immediately. Rinse mouth. Never give anything by mouth to a person who isunconscious or is having convulsions. Do NOT induce vomiting unless directed by physician. If vomiting occurs, keep head low so that stomach content does not get into the lungs.Most important symptoms and effects, both acute and delayedRefer to section 2 and/or section 11 of the SDS for the most important known symptoms and effects.Indication of any immediate medical attention and special treatment neededProvide general supportive measures and treat symptomatically. Chemical burns: Flush with water immediately. While flushing, remove clothes which do not adhere to affected area. Call an ambulance. Continue flushing during transport to hospital. Keep person under observation. Symptoms may be delayed.General informationEnsure medical personnel are aware of the material(s) involved and take precautions to protect themselves.Extinguishing mediaSuitable extinguishing media Use extinguishing media appropriate for surrounding fire.Unsuitable extinguishing media Do not use a heavy water stream. Use of heavy stream of water may spread fire.Specific hazards arising from the substance or mixtureFire hazard Not flammableExplosion hazard Not explosiveReactivity May be corrosive to metals.Hazardous combustion products Sulfur oxides. Other irritating fumes and smoke.Advice for firefightersPrecautionary measures Exercise caution when fighting any chemical fire; hazardous fumes will be present.Use water spray or fog for cooling exposed containers.Firefightingequipment/instructionsProtection during firefighting Do not enter fire area without proper protective equipment, including respiratory protection.Other information Refer to section 9 of the SDS for flammability properties.Personal precautions, protective equipment, and emergency proceduresKeep unnecessary personnel away. Keep people away from and upwind of spill/leak. Keep out of low areas. Wear appropriate protective equipment and clothing during cleanup. Do not breathe dust or mists. Do not touch damaged containers or spilled material unless wearing appropriate protective clothing. Ensure adequate ventilation. Local authorities should be advised if significant spillages cannot be contained. For personal protective equipment, refer to section 8 of the SDS.Environmental precautionsAvoid discharge into drains, watercourses, or onto the ground.Methods and material for containment and cleaning upVentilate the area. Dike the spilled material where this is possible. Stop leak if it can be done without risk. Absorb spillage to prevent material damage. Absorb in vermiculite, dry sand or earth, and place into containers. Prevent entry into waterways, sewers, basements, or confined areas. Following product recovery, flush area with water. Dilute acid with water and neutralize with dilute base. If not recoverable, dilute with water or flush to holding area and neutralize. Contaminated absorbent material may pose the same hazards as the spilled product. In the event of a spill or accidental release, notify relevant authorities in accordance with all applicable regulations.Reference to other sectionsFor exposure controls and personal protection, refer to section 8 of the SDS. For waste disposal, refer to section 13 of the SDS.Personal precautions, protective equipment, and emergency proceduresDo not breathe dust or mists. Do not get in eyes, on skin, or on clothing. Do not taste or swallow. Avoid prolonged exposure.Provide adequate ventilation. Wear appropriate personal protective equipment. For personal protective equipment, refer to section8 of the SDS. Keep away from incompatibles. Observe good industrial hygiene practices. Label containers appropriately. Conditions for safe storage, including any incompatibilitiesStore in corrosive-resistant container with corrosive-resistant inner liner. Keep tightly capped. Store locked up. Store out of direct sunlight between 36°F–85°F. Store away from incompatible materials (refer to section 10 of the SDS).Occupational exposure limitsUS ACGIH Threshold Limit ValuesComponents Type ValueSulfuric acid (CAS 7664-93-9) TWA 0.2 mg/m3 (thoracicparticulate)US NIOSH: Pocket Guide to Chemical HazardsComponents Type ValueSulfuric acid (CAS 7664-93-9) TWA 1 mg/m3Sulfuric acid (CAS 7664-93-9) IDLH 15 mg/m3US OSHA Table Z-1 Limits for Air Contaminants (29 CFR 1910.1000)Components Type ValueSulfuric acid (CAS 7664-93-9) TWA 1 mg/m3Biological limit valuesNo biological exposure limits noted for the ingredient(s).Exposure controlsAppropriate engineering controls Good general ventilation (typically 10 air changes per hour) should be used. Ventilation ratesshould be matched to conditions. If applicable, use process enclosures, local exhaustventilation, or other engineering controls to maintain airborne levels below recommendedexposure limits. If exposure limits have not been established, maintain airborne levels to anacceptable level. Eyewash facilities and emergency shower must be available when handlingthis product.Personal protective equipmentEye/face protection Wear appropriate chemical safety goggles if contact is likely to occur.Skin protection Wear appropriate chemical-resistant gloves and clothing if contact is likely to occur.Body protection Wear appropriate protective clothing if contact is likely to occur.Respiratory protection In case of insufficient ventilation, wear suitable respiratory equipment. Use a NIOSH/MSHAapproved respirator if there is a risk of exposure to dust/fumes at levels exceeding theexposure limits. Advice should be sought from respiratory protection suppliers.Information on basic physical and chemical propertiesPhysical state LiquidForm LiquidColor Clear, colorlessOdor OdorlessOdor threshold No data availablepH 1.3Evaporation rate No data availableMelting point No data availableFreezing point No data availableInitial boiling point (boiling range) No data availableFlash point No data availableSpecific gravity No data availableAuto-ignition temperature No data availableDecomposition temperature No data availableFlammability (solid, gas) No data availableUpper Flammability Limit No data availableLower Flammability Limit No data availableVapor pressure No data availableVapor density No data availableSolubility No data availablePartition coefficient(n-octanol/water)No data availableViscosity No data availableExplosive properties No data availableOxidizing properties No data availableReactivity May be corrosive to metals.Chemical stability Stable under recommended handling and storage conditions (refer to section 7 of the SDS). Possibility of hazardousreactionsNo dangerous reaction known under conditions of normal use.Conditions to avoid Contact with incompatible materials. Do not use in areas without adequate ventilation. Incompatible materials Bases, chlorates, halides, hydrogen peroxide, metal compounds, nitrates, nitromethane,organic materials, oxidizing agents, perchlorates, phosphorous.Hazardous decompositionproductsNo hazardous decomposition products under normal conditions.Information on toxicological effectsLikely routes of exposure are skin/eye contact and ingestion.Most importantsymptoms/effects, acute and delayed Direct skin contact may cause corrosive skin burns, deep ulcerations, and possibly permanent scarring.Direct contact with concentrated solutions may be corrosive and may cause severe damage, including blindness. Symptoms may include stinging, tearing, redness, swelling, and blurred vision.Inhalation of mists can cause respiratory irritation. Symptoms may include coughing, choking, and wheezing. Inhalation could result in pulmonary edema (fluid accumulation). Symptoms of pulmonary edema (chest pain, shortness of breath) may be delayed.May produce burns to lips, oral cavity, upper airway, esophagus, and possibly the digestive tract. Symptoms may include abdominal pain, vomiting, burns, perforations, and bleeding.Acute toxicity This product is not classified as an acute toxicity hazard. See below for product and individualingredient acute toxicity data.Product Species Acute Toxicity Estimate (ATE)Sulfuric Acid .12N (CAS Mixture)AcuteDermalLD50Rat No data availableInhalationLC50Rat >5 mg/LOralLD50Rat >2000 mg/kgComponents Species Acute Toxicity DataSulfuric acid (CAS 7664-93-9)AcuteDermalLD50Rat No data availableInhalationLC50Rat 0.375 mg/L (for aerosol mists)OralLD50Rat 2140 mg/kgSkin corrosion/irritation Causes severe skin burns.Serious eye damage/eye irritation Causes serious eye damage.Respiratory sensitization No data availableSkin sensitization No data availableGerm cell mutagenicity No data availableCarcinogenicityIARC Monographs. Overall Evaluation of CarcinogenicityNot regulatedOSHA Specifically Regulated Substances (29 CFR 1910.1001-1096)Not regulatedUS National Toxicology Program (NTP) Report on CarcinogensNot regulatedReproductive toxicity No data availableNo data availableSpecific target organ toxicity(single exposure)Specific target organ toxicityNo data available(repeated exposure)Aspiration hazard No data availableEcotoxicity This product is not classified as environmentally hazardous.Persistence and degradability No data availableBioaccumulative potential No data availableMobility in soil No data availableOther adverse effects Large or frequent spills can have a harmful or damaging effect on the environment.Collect and reclaim or dispose of in sealed containers at a licensed waste disposal site. Since emptied containers may retain product residue, follow label warnings even after container is emptied. This material and its container must be disposed of in a safe manner. Dispose of contents/container in accordance with local/regional/national/international regulations.DOTUN number UN3264UN Proper shipping name Corrosive Liquid, Acidic, Inorganic, N.O.S. (Sulphuric Acid)Reportable Quantity 1000 lbsClass (Subsidiary risk) 8Label(s) 8Packing group IIISpecial provisions IB3, T7, TP1, TP28Packaging exceptions 154Packaging, non-bulk 203IATAUN number UN3264UN Proper shipping name Corrosive Liquid, Acidic, Inorganic, N.O.S. (Sulphuric Acid)Class (Subsidiary risk) 8Packing group IIISpecial provisions NoneIMDGUN number UN3264UN Proper shipping name Corrosive Liquid, Acidic, Inorganic, N.O.S. (Sulphuric Acid)Class (Subsidiary risk) 8Packing group IIIEnvironmental hazardsMarine pollutant NoSpecial provisions 223, 274EmS F-A, S-BSpecial precautions for user Read safety instructions, SDS, and emergency procedures before handling.This substance/mixture is not intended to be transported in bulk. Transport in bulk according to Annex IIof MARPOL 73/78 and the IBC CodeDOT hazard pictogramsIATA; IMDG hazard pictogramsUS federal regulationsCERCLA Hazardous Substance (40 CFR 302.4)Chemical name CAS number Reportable QuantitySulfuric acid 7664-93-9 1000 lbsSARA 302 Extremely Hazardous Substance (40 CFR 355 Appendices A / B)Chemical name CAS numberSulfuric acid 7664-93-9SARA 304 Emergency Release NotificationChemical name CAS numberSulfuric acid 7664-93-9SARA 311/312 Hazardous ChemicalChemical name CAS numberSulfuric acid 7664-93-9SARA 313 (TRI reporting)Not regulatedTSCA Section 8(b) Chemical InventoryAll components are on the U.S. EPA TSCA Inventory list.TSCA Section 12(b) Export Notification (40 CFR 707, Subpt. D)Not regulatedOther federal regulationsClean Air Act (CAA) Section 112 Hazardous Air Pollutants (HAPs)Not regulatedClean Air Act (CAA) Section 112® Accidental Release Prevention (40 CFR 68.130)Not regulatedClean Water Act, Toxic and Priority Pollutants (40 CFR 401.15 and CFR 423, Appendix A) Not regulatedSafe Drinking Water Act (SDWA)Not regulatedUS state regulationsCalifornia Safe Drinking Water and Toxic Enforcement Act of 1986 (California Proposition 65)Not regulatedMassachusetts Right-to-Know ActChemical name CAS numberSulfuric acid 7664-93-9New Jersey Worker and Community Right-to-Know ActChemical name CAS numberSulfuric acid 7664-93-9Pennsylvania Worker and Community Right-to-Know ActChemical name CAS numberSulfuric acid 7664-93-9Rhode Island Right-to-Know ActChemical name CAS numberSulfuric acid 7664-93-9NFPA RatingHealth hazard 1Fire hazard 0Reactivity 0Specific N/ADisclaimerThe information in the Safety Data Sheet is offered for your consideration and guidance for safe handling, use, storage,transportation, disposal, and release of this product and is not considered a warranty or quality specification. Taylor Technologies, Inc., disclaims all expressed or implied warranties and assumes no responsibility for the accuracy of completeness of the data contained herein. The data in this SDS does not apply to use with any other product or in any other process.License granted to make unlimited paper copies for internal use only. This Safety Data Sheet may not be altered in any way without the expressed knowledge and permission of Taylor Technologies, Inc. The information contained in this sheet is based on lab experience and the most current data available.Issue date:May 2015Last revisionsDecember 2019。
有机电致发光材料9-(1-萘基)-10-(2-萘基)蒽的合成及表征
有机电致发光材料9-(1-萘基)-10-(2-萘基)蒽的合成及表征杨杰;吕宏飞【摘要】采用9-溴蒽,1-萘硼酸,2-萘硼酸为原料,通过Suzuki偶联反应制备出9-(1-萘基)-10-(2-萘基)蒽(α,β-ADN).通过红外、核磁共振对其结构进行了表征.利用紫外和荧光光谱对其发光性能进行了研究.研究发现,α,β-ADN紫外可见吸收光谱有2个吸收带,分别归属为E带和B带,E带有2个吸收峰,波长分别为232 nm、262 nm;B带有3个吸收峰,其波长分别为359 nm、377 nm、398 nm,α,β-ADN的吸收带边为420 nm.采用401 nm的激发光激发,荧光发射峰值波长为440nm,属于蓝色荧光.【期刊名称】《黑龙江科学》【年(卷),期】2013(000)002【总页数】4页(P28-31)【关键词】α,β-AND;蓝光材料;Suzuki偶联;有机电致发光【作者】杨杰;吕宏飞【作者单位】黑龙江省科学院石油化学研究院,哈尔滨150040【正文语种】中文【中图分类】TQ241.5+5;TQ242.3有机电致发光器件(OLED)与其他显示器件相比具有自发光,不需要背景光源和滤光片,功耗低,低驱动电压(3~10 V),宽视角,响应速度快等特点,已成功应用于以手机为代表的小尺寸显示领域,并向电视、显示器等领域拓展[1-4]。
在全彩OLED平板显示领域,高效率和高纯度的红、蓝、绿三原色发光材料扮演着极其重要的角色。
其中蓝光材料不仅是蓝色光源的重要组成部分,而且还可作为绿光和红光材料能量转移掺杂的主体发光材料[5,6]。
迄今为止,人们一直致力于开发新型蓝色磷光或者荧光材料。
然而,蓝色荧光材料因为化合物本身的不稳定性以及色彩纯度问题,迟迟未能有所突破,与已经达到商业化要求的绿光材料相比,高效率和长寿命的蓝光材料与器件,特别是深蓝光材料与相应器件相对还比较缺乏[7,8],因此,新型深蓝光材料的研究与开发,成为目前OLED行业普遍关注的焦点。
国产医用防护服需要哪些资质、要符合哪些要求
国产医用防护服需要哪些资质、要符合哪些要求医用防护服想要出口的条件是达到国外关于医用防护服的相关标准。
出口美国:必须要取得美国食品和药物管理局FDA 注册认证才可以在美国本土市场进行销售。
美国医用防护服可分为非手术防护服和手术用防护服两类。
非手术防护服属于I 类医疗器械,免于上市前登记,直接进行机构注册。
而手术用防护服属于II 类医疗器械,需要进行上市前登记,即需要申请FDA 510(K)。
出口欧盟:须获得欧盟CE认证,并符合技术法规:(EU) 2016/425出口日本:必须满足日本的Pharmaceutical and Medical Device Act (PMD Act),在PMD Act的要求下,TOROKU注册系统要求国外的制造商必须向PMDA注册制造商信息。
出口韩国:韩国医疗器械准入的法规门槛,基本分类为I、II、III、IV 类,持证为韩国公司(License holder),韩国收货人需要到韩国药监局Korea Pharmaceutical Traders Association韩国劳动部2020-35号公告《防护设备** 认证通知》内给出了化学物质防护服、防尘口罩等性能标准和测试方法。
根据《防护设备** 认证通知》内的防护服性能标准内容,防护服共分为六大类(其中** 类又分为5 小类)。
出口澳大利亚:须通过澳洲的TGA注册,TGA 是Therapeutic Goods Administration 的简写,全称是治疗商品管理局。
澳大利亚对医疗器械分为I类,ls and Im, IIa, IIb, III类,分别为豁免、备案和注册。
注:澳大利亚已与欧盟达成互认协议。
这意味着,合格评定证书由TGA颁发的也被欧盟认可,TGA也认可欧盟CE认证。
已获CE认证的用户,可提交CE证书及相关资料,获得TGA证书。
INSl/AAMi PB70*2012 …―一臣疗侵中fWU的WPB*Liquid barrier performance ind dassifiution of protective apparel and 6rapes intended for ux in health car e^adltiesANSI/NFPA 1999 -Z006 SttEfT手睿用疏护IK怖*Standard on Protwtive GcXtiingfor Emetflency Medical OperatronsA5TM F903-2018 防护嚴用村Hit该体尹航钠试蛤方淫Stxxbrd Test Method for R«sirtin< 變cfH^terbls Used In Protective Clot hlngPenetration tw UquidsAS7M F1670/F1670M.2017a刀的斥准说迫方法Standard Ten Method for Reausru* -of Materbls irsedl in Protecth/e Clot Ming to Penetration by Synthetic Bl wdA$TM F1^71/ri671M-201> ftR Phl-Xl忒去手席泊口静<ir ■律巧対萨再叭倾总羽料两标*谴智Standard Test Method for Resi«an< ・ 0H»terhl> VseJ In Protective Clot hingtoPenetratIan by Blood-Some PathogensUUng Phi-X174 Bacteriop hao^P«n«nti©n JS a 7«t SystemASTM F2878-2019性说號方垂Standard Test Method for Protective G-othinQ Materijl Resistance to Hypo dermic Needle Punctured$7M F3Q5Q-2O17 Standard (Xiide Conformity Asse Qf Pcr$on#i Protective aghi rg and EquipmentMFPA iggg・2(H8 «Standard on Pro<ectlve dothinq an dEn^wbk^ for Em^rgtftcy MedialOperations (Effertive Oate: 8/21/2 017) 中文毬名英文越名EN | 防护贾,馬件倉•巧护尋幻隹舵录*?可试验万未,合产E«t2gq 军9冃PraKlhv tQth油g - PbformocGe r«qvlrements and te^ts methods forX«Ktiv« clxhifig 拄infwGveM"“ (Incorporating corrigtndumSeptember 20(H)14126-2003*AC-2004 翳棘抗空脚护胺的性蒔豪求detective clothing・ Pedormance re quirements and test^ methods for p rotecthre do-thin^ against infective agentsEW ISO 22M2-2W5 防借皿IWI脯瞬/JR纾千 "主巾侵入袒力的总萤方层Clothing for protection aoalnit ln.feclious agenti. Test method for resist ane«to dry microbial p^netotioh I £022612:2005€N 6133^3-2014 匡用⑥砸,的3労小沪昌・・^329:的泸観莎目冃印・會Prctectivc devices a^airot <fiagncisti cmedical X-radiation - Part 3: Prot« rtlv>rlrthingt) 3nd prAt^rtivo patent shleMsAAMI PB70*2012 FD AU可旳用于卫哇厲住说老的;51PSW<8P®rfla &R5<xK」quld barrier pwferman<^ and clsvsilication of protective aopar^l and d np«intended for UM in health car • fadntiKFDA RECOGNIZED欧综上所述,想要出口医用防护服,必须要达到相对应的国外防护服标准,且拿到相关的资质证书才可以销售需要注意的是,不同国家对于医疗器械产品的标准会有所不同,除了部分国家可以互通之外,大部分国家都不可以互通,也就是说某款产品即便符合了某个国家的医用防护服标准,但其并不能在别的国家进行销售。
amyloidosis
Continue
Version 1.2013, 06/29/12 © National Comprehensive Cancer Network, Inc. 2012, All rights reserved. The NCCN Guidelines and this illustration may not be reproduced in any form without the express written permission of NCCN®.
Ruby Meredith, MD, PhD § Steven Devine, MD † University of Alabama at Birmingham The Ohio State University Comprehensive Comprehensive Cancer Center Cancer Center - James Cancer Hospital and Solove Research Institute Noopur Raje, MD † ‡ Dana-Farber/Brigham and Women’s Cancer Center | Massachusetts General Benjamin Djulbegovic, MD , PhD † ‡ x Hospital Cancer Center H. Lee Moffitt Cancer Center & Research Institute Jeffrey Schriber, MD ‡ x Edward A. Faber, Jr., DO ‡ The University of Texas UNMC Eppley Cancer Center at MD Anderson Cancer Center The Nebraska Medical Center NCCN Staff Rashmi Kumar, PhD Dorothy A. Shead, MS NCCN Guidelines Panel Disclosures
SAE 2012-OBD
SAE Technical Standards Board Rules provide that: “This report is published by SAE to advance the state of technical and engineering sciences. The use of this report is entirely voluntary, and its applicability and suitability for any particular use, including any patent infringement arising therefrom, is the sole responsibility of the user.”SAE reviews each technical report at least every five years at which time it may be reaffirmed, revised, or cancelled. SAE invites your written comments and suggestions. Copyright ©2002 Society of Automotive Engineers, Inc.All rights reserved. No part of this publication may be reproduced, stored in a retrieval system or transmitted, in any form or by any means, electronic, mechanical, photocopying, recording, or otherwise, without the prior written permission of SAE.TO PLACE A DOCUMENT ORDER:Tel: 877-606-7323 (inside USA and Canada)Tel: 724-776-4970 (outside USA)Fax: 724-776-0790Email: custsvc@TABLE OF CONTENTS1Scope (4)1.1Purpose (4)1.2Differences from ISO Document (4)2References (4)2.1Applicable Publications (4)2.1.1SAE Publications (4)2.1.2ISO Documents (4)2.2Related Publications (4)2.2.1SAE Publications (4)3Terms and Definitions (4)4General Specifications (7)5Format Structure (7)5.1Description (7)5.2ISO/SAE Controlled Codes (Core DTCs) (8)5.3Manufacturer Controlled Codes (Non-Uniform DTCs) (9)5.4Body System Groupings (9)5.4.1B0XXX ISO/SAE controlled (9)5.4.2B1XXX Manufacturer Controlled (9)5.4.3B2XXX Manufacturer Controlled (9)5.4.4B3XXX Reserved by Document (9)5.5Chassis System Groupings (9)5.5.1C0XXX ISO/SAE Controlled (9)5.5.2C1XXX Manufacturer Controlled (9)5.5.3C2XXX Manufacturer Controlled (9)5.5.4C3XXX Reserved by Document (9)5.6Powertrain System Groupings - DTC Numbers and Descriptions are Given in Appendix B (9)5.6.1P0XXX ISO/SAE controlled (9)5.6.2P1XXX manufacturer control (9)5.6.3P2XXX ISO/SAE controlled (9)5.6.4P3XXX Manufacturer Controlled and ISO/SAE Reserved (9)5.7Network Groupings - DTC Numbers and Descriptions are Given in Appendix C (9)5.7.1U0XXX ISO/SAE Controlled (9)5.7.2U1XXX Manufacturer Controlled (9)5.7.3U2XXX Manufacturer Controlled (9)5.7.4U3XXX Reserved (9)6Diagnostic Trouble Code Descriptions (10)7Change Requests (11)Appendix A (Normative) Diagnostic Trouble Code Naming Guidelines (12)A.1Discussion (12)Appendix B (Normative) Powertrain System Diagnostic Trouble Code (14)B.1P00XX Fuel and Air Metering and Auxiliary Emission Controls (14)B.2P01XX Fuel and Air Metering (16)B.3P02XX Fuel and Air Metering (19)B.4P03XX Ignition System or Misfire (21)B.5P04XX Auxiliary Emission Controls (23)B.6P05XX Vehicle Speed, Idle Control, and Auxiliary Inputs (26)B.7P06XX Computer and Auxiliary Outputs (28)B.8P07XX Transmission (31)B.9P08XX Transmission (33)B.10P09XX Transmission (36)B.11P0AXX Hybrid Propulsion (38)B.12P0BXX Reserved by Document (39)B.13P0CXX Reserved by Document (39)B.14P0DXX Reserved by Document (39)B.15P0EXX Reserved by Document (39)B.16P0FXX Reserved by Document (39)B.17P10XX Manufacturer Controlled Fuel and Air Metering and Auxiliary Emission Controls (39)B.18P11XX Manufacturer Controlled Fuel and Air Metering (39)B.19P12XX Manufacturer Controlled Fuel and Air Metering (39)B.20P13XX Manufacturer Controlled Ignition System or Misfire (39)B.21P14XX Manufacturer Controlled Auxiliary Emission Controls (39)B.22P15XX Manufacturer Controlled Vehicle Speed, Idle Control, and Auxiliary Inputs (39)B.23P16XX Manufacturer Controlled Computer and Auxiliary Outputs (39)B.24P17XX Manufacturer Controlled Transmission (39)B.25P18XX Manufacturer Controlled Transmission (39)B.26P19XX Manufacturer Controlled Transmission (39)B.27P20XX Fuel and Air Metering and Auxiliary Emission Controls (40)B.28P21XX Fuel and Air Metering and Auxiliary Emission Controls (42)B.29P22XX Fuel and Air Metering and Auxiliary Emission Controls (45)B.30P23XX Ignition System or Misfire (47)B.31P24XX Auxiliary Emission Controls (48)B.32P25XX Auxiliary Inputs (50)B.33P26XX Computer and Auxiliary Outputs (52)B.34P27XX Transmission (54)B.35P28XX ISO/SAE Reserved (56)B.36P2AXX Fuel and Air Metering and Auxiliary Emission Controls (56)B.37P30XX Fuel and Air Metering and Auxiliary Emission Controls (56)B.38P31XX Fuel and Air Metering and Auxiliary Emission Controls (56)B.39P32XX Fuel and Air Metering and Auxiliary Emission Controls (56)B.40P33XX Ignition System or Misfire (56)B.41P34XX Cylinder Deactivation (56)B.42P35XX ISO/SAE Reserved (59)B.43P36XX ISO/SAE Reserved (59)B.44P37XX ISO/SAE Reserved (59)B.45P38XX ISO/SAE Reserved (59)B.46P39XX ISO/SAE Reserved (59)Appendix C(Normative) Network Communication Groupings (60)C.1U00XX Network Electrical (60)C.2U01XX Network Communication (62)C.3U02XX Network Communication (65)C.4U03XX Network Software (66)C.5U04XX Network Data (67)1.Scope1.1Purpose—This SAE Recommended Practice supersedes SAE J2012 MAR1999, and is technically equivalentto ISO/DIS 15031-6:April 30, 2002.This document is intended to define the standardized Diagnostic Trouble Codes (DTC) that On-Board Diagnostic (OBD) systems in vehicles are required to report when malfunctions are detected.This document includes:a.Diagnostic Trouble Code formatb. A standardized set of Diagnostic Trouble Codes and descriptions1.2Differences from ISO Document—There are no technical differences between this document and ISO/DIS15031-6:April 30, 2002.2.References2.1Applicable Publications—The following publications form a part of the specification to the extent specifiedherein. Unless otherwise indicated, the latest version of SAE publications shall apply.2.1.1SAE P UBLICATIO NS—Available from SAE, 400 Commonwealth Drive, Warrendale, PA 15096-0001.SAE J1930—Electrical/Electronic Systems Diagnostic Terms, Definitions, Abbreviations, and Acronyms -Equivalent to ISO/TR 15031-2:April 30, 2002SAE J1979—E/E Diagnostic Test Modes - Equivalent to ISO/DIS 15031-5:April 30, 20022.1.2ISO D O CUMENT—Available from ANSI, 25 West 43rd Street, New York, NY 10036-8002.ISO/DIS 15031-6: April 30, 2002—Road vehicles—Communication between vehicle and external test equipment for emissions-related diagnostics—Part 6: Diagnostic trouble code definitions2.2Related Publications—The following publications are provided for information purposes only and are not arequired part of this document.2.2.1SAE P UBLICATIO N—Available from SAE, 400 Commonwealth Drive, Warrendale, PA 15096-0001.SAE J1978—OBD II Scan Tool—Equivalent to ISO/DIS 15031-4:December 14, 20012.2.2ISO D O CUMENT—Available from ANSI, 25 West 43rd Street, New York, NY 10036-8002.ISO 15031-1:2001—Road vehicles—Communication between vehicle and external test equipment for emissions-related diagnostics—Part 1: General information3.Terms and Definitions—This document is not intended to be used for terms and definitions of vehiclecomponent terminology. These may appear in SAE J1930.3.1Circuit/Open—Fixed value or no response from the system where specific high or low detection is not feasibleor can be used in conjunction with circuit low and high codes where all three circuit conditions can be detected.NOTE—The term “malfunction” has, in most cases, been deleted from the DTC description.3.2Range/Performance—Circuit is in the normal operating range, but not correct for current operating conditions,it may be used to indicate stuck or skewed values indicating poor performance of a circuit, component, or system.3.3Low Input—Circuit voltage, frequency, or other characteristic measured at the control module input terminal orpin that is below the normal operating range.3.4High Input—Circuit voltage, frequency, or other characteristic measured at the control module input terminalor pin that is above the normal operating range.3.5Bank—Specific group of cylinders sharing a common control sensor, bank 1 always contains cylinder number1, bank 2 is the opposite bankNOTE—If there is only one bank, use bank #1 DTCs and the word bank may be omitted. With a single “bank”system using multiple sensors, use bank #1.3.6Sensor Location—Location of a sensor in relation the engine air flow, starting from the fresh air intakethrough to the vehicle tailpipe or fuel flow from the fuel tank to the engine in order numbering 1,2,3 and so on NOTE—See Figures 1 to 4.FIGURE 1—V6/V8/V12 CYLINDER ENGINE WITH 2 EXHAUST BANKS AND 4 CATALYSTS EXAMPLEFIGURE 2—V6/V8/V12 CYLINDER ENGINE WITH 2 EXHAUST BANKS AND 3 CATALYSTS EXAMPLEFIGURE 3—L4/L5/L6 CYLINDER ENGINE WITH 1 EXHAUST BANK AND 2 CATALYSTS EXAMPLEFIGURE 4—L4/L5/L6 CYLINDER ENGINE WITH 1 EXHAUST BANK AND 1 CATALYST EXAMPLE3.7Left/Right and Front/Rear—Component identified by its position as if it can be viewed from the driversseating position.3.8“A” “B”—Where components are indicated by a letter (i.e., A, B, C, etc.) this would be manufacturer defined,starting with component “A”.3.9Intermittent/Erratic—The signal is temporarily discontinuous, the duration of the fault is not sufficient to beconsidered an open or short, or the rate of change is excessive.4.General Specifications—The following table specifies systems, code categories, hexadecimal values andparticular sections of electrical/electronic systems diagnostic.TABLE 1—GENERAL CODE SPECIFICATIONSSystem Code categories Hex value DTC PrefixBody B0xxx - B3xxx8xxx - Bxxx BChassis C0xxx - C3xxx4xxx - 7xxx CPowertrain P0xxx - P3xxx0xxx - 3xxx PNetwork U0xxx - U3xxx Cxxx - Fxxx U The recommended DTCs consist of a three digit numeric code preceded by an alphanumeric designator. The alphanumeric designators are “B0”, “B1”, “B2”, “B3”, “C0”, “C1”, “C2”, “C3”, “P0”, “P1”, “P2”, “P3”, “U0”, “U1”,“U2”, “U3”, corresponding to four sets of body, four sets of chassis, four sets of powertrain and four sets of network trouble codes. The code structure itself is partially open-ended. A portion of the available numeric sequences (portions of “B0”, “C0”, “P0” and “U0”) is reserved for uniform codes assigned by this or future updates. Detailed specifications of the DTC format structure are specified in Section 5. Most circuit, component, or system diagnostic trouble codes are specified by four basic categories:—General circuit /open—Range/Performance problem—Circuit Low—Circuit HighCircuit Low is measured with the external circuit, component, or system connected. The signal type (voltage, frequency, etc.) shall be included in the message after Circuit Low or Circuit High.Circuit High is measured with the external circuit, component, or system connected. The signal type (voltage, frequency, etc.) may be included in the message after Circuit Low or Circuit High.5.Format Structure5.1Description—The diagnostic trouble code consists of an alphanumeric designator, B0 -- B3 for body, C0 -- C3for chassis, P0 -- P3 for powertrain, and U0 -- U3 for network communication, followed by three characters.The assignment of the proper alpha designator should be determined by the area most appropriate for that function. In most cases, the alpha designator will be implied since diagnostic information will be requested froma particular controller. However, this does not imply that all codes supported by a particular controller shallhave the same alphanumeric designator. The codes are structured as in the following figure.FIGURE 5—STRUCTURE OF DIAGNOSTIC TROUBLE CODESEXAMPLEThe data bus value $9234 would be displayed to technicians as the manufacturer controlled bodycode B1234, see the figure below.FIGURE 6—EXAMPLE OF TROUBLE CODE STRUCTURECodes have been specified to indicate a suspected trouble or problem area and are intended to be used as adirective to the proper service procedure. To minimize service confusion, fault codes should not be used toindicate the absence of problems or the status of parts of the system (e.g., powertrain system O.K., or MILactivated), but should be confined to indicate areas in need of service attention.Some ranges have been expanded beyond 100 numbers by using the hexadecimal base 16 number system.5.2ISO/SAE Controlled Codes (Core DTCs)—ISO/SAE controlled diagnostic trouble codes are those codeswhere industry uniformity has been achieved. These codes were felt to be common enough across mostmanufacturers' applications that a common number and fault message could be assigned. All unspecifiednumbers in each grouping have been reserved for future growth. Although service procedures may differwidely amongst manufacturers, the fault being indicated is common enough to be assigned a particular faultcode. Codes in this area are not to be used by manufacturers until they have been approved by ISO/SAE.5.3Manufacturer Controlled Codes (Non-Uniform DTCs)—Areas within each alpha designator have beenmade available for manufacturer-controlled DTCs. These are fault codes that will not generally be used by a majority of the manufacturers due to basic system differences, implementation differences, or diagnostic strategy differences. Each vehicle manufacturer or supplier who designs and specifies diagnostic algorithms, software, and diagnostic trouble codes are strongly encouraged to remain consistent across their product line when assigning codes in the manufacturer controlled area. For powertrain codes, the same groupings should be used as in the ISO /SAE controlled area, i.e., 100's and 200's for fuel and air metering, 300's for ignition system or misfire, etc.Code groupings for non-powertrain codes will be specified at a later date.While each manufacturer has the ability to define the controlled DTCs to meet their specific controller algorithms, all DTC words shall meet SAE J1930.5.4Body System Groupings5.4.1B0XXX ISO/SAE C O NTROLLED5.4.2B1XXX M ANUFACTURER C ONTROLLED5.4.3B2XXX M ANUFACTURER C ONTROLLED5.4.4B3XXX R ES ERVE D BY D O CUMENT5.5Chassis System Groupings5.5.1C0XXX ISO/SAE C ONTRO LLE D5.5.2C1XXX M ANUFACTURER C O NTROLLED5.5.3C2XXX M ANUFACTURER C O NTROLLED5.5.4C3XXX R ESERVED BY D O CUMENT5.6Powertrain System Groupings—DTC Numbers and Cescriptions are Given in Appendix B5.6.1P0XXX ISO/SAE C O NTROLLED5.6.2P1XXX M ANUFACTURER C ONTROL5.6.3P2XXX ISO/SAE C O NTROLLED5.6.4P3XXX M ANUFACTURER C ONTROLLED A ND ISO/SAE R ES ERV ED5.7Network Groupings—DTC Numbers and Descriptions are given in Appendix C5.7.1U0XXX ISO/SAE C ONTRO LLE D5.7.2U1XXX M ANUFACTURER C O NTROLLED5.7.3U2XXX M ANUFACTURER C O NTROLLED5.7.4U3XXX R ESERVED6.Diagnostic Trouble Code Descriptions—Each specified fault code has been assigned a description toindicate the circuit, component or system area that was determined to be at fault. The descriptions are organized such that different descriptions related to a particular sensor or system are grouped together. In cases where there are various fault descriptions for different types of faults, the group also has a “generic”description as the first code/message of the group. A manufacturer has a choice when implementing diagnostics, based on the specific strategy and complexity of the diagnostic.Where more specific fault descriptions for a circuit, component, or system exist, the manufacturer should choose the code most applicable to their diagnosable fault. The descriptions are intended to be somewhat general to allow manufacturers to use them as often as possible yet still not conflict with their specific repair procedures. The terms “low” and “high” when used in a description, especially those related to input signals, refer to the voltage, frequency, etc. at the pin of the controller. The specific level of “low” and “high” shall be specified by each manufacturer to best meet their needs.For example, in diagnosing a 5 V reference Throttle Position Sensor (TP Sensor), if the input signal at the Powertrain Control Module (PCM) is stuck at near 0 V, a manufacturer has the flexibility to select from either of two codes - P0120 (Throttle/Pedal Position Sensor/Switch A Circuit) or P0122 (Throttle/Pedal Position Sensor/ Switch A Circuit Low Input), depending on the manufacturer's diagnostic procedures. If the input signal at the PCM is stuck at near 5 V, a manufacturer has the flexibility to select from either of two codes - P0120 (Throttle/ Pedal Position Sensor/Switch A Circuit) or P0123 (Throttle/Pedal Position Sensor/Switch A Circuit High Input), depending on the manufacturer's diagnostic procedures. If the input signal at the PCM is stuck at 1.5 V at idle instead of the expected 1.0 V, the manufacturer has the flexibility to select from either of two codes - P0120 (Throttle/Pedal Position Sensor/Switch A Circuit) or P0121 (Throttle/Pedal Position Sensor/Switch A Circuit Range/Performance Problem), depending on the manufacturer's diagnostic procedures. The root cause of the higher than expected TP Sensor voltage may be either a faulty TP Sensor, corrosion in the TP Sensor connections or an improperly adjusted throttle plate. Identification of the root cause is done using the diagnostic procedures and is not implied by the DTC message, thus allowing the manufacturer the flexibility in assigning DTCs Change requests.7.Change Requests—Use this form to pass your request.Request Form for New SAE J2012 SAE Controlled DTCWhat is the purpose of the component, circuit, or system?Example: Exhaust Gas Recirculation.What is the purpose of the diagnostic?Example: detect low EGR flowRequested Group NumberRequested DTC NumberRequested DTC NomenclatureExample: EGR Low Flow DetectedRequested by:Phone/FaxEmailAddressDate:Please send completed form(s) to:SAE Headquarters755 West Big Beaver RoadSuite 1600Troy, MI 48084USAATTN: SAE J2012 PowertrainCommittee Chairman8.Notes8.1Marginal Indicia—The change bar (l) located in the left margin is for the convenience of the user in locatingareas where technical revisions have been made to the previous issue of the report. An (R) symbol to the left of the document title indicates a complete revision of the report.PREPARED BY THE SAE VEHICLE ELECTRICAL AND ELECTRONICS DIAGNOSTICSYSTEMS STANDARDS COMMITTEEAPPENDIX A(NORMATIVE)DIAGNOSTIC TROUBLE CODE NAMING GUIDELINESA.1Discussion—The following Table A1 is a guideline used to help in determining DTC descriptions. Appendix Bshows applications for recommended industry common trouble codes for the powertrain control system. These include systems that might be integrated into an electronic control module that would be used for controlling engine functions, such as fuel, spark, idle speed, and vehicle speed (cruise control) as well as those for transmission control. The fact that a code is recommended as a common industry code does not imply that it isa required code (legislated), an emission related code, nor that it indicates a fault that will cause themalfunction indicator to be illuminated.TABLE A1—DTC NAMING GUIDELINES FOR SIGNALS FROM COMPONENTSComponent/System SAE J19301)AcronymSAEJ19301)Modifier(if used) 1)Noun Name1Circuit1)Intermittent(if used) 1)State(if used) 1)Parameter(if used) 1)Location(if used) 1)Throttle Position TP Sensor Circuit Low Voltage Throttle Position TP Sensor Circuit PerformanceManifold AbsolutePressureMAP Sensor Circuit High VoltageEngine CoolantTemperatureECT Sensor Circuit Low Voltage Intake Air Temperature IAT Sensor Circuit High Voltage Vehicle Speed Sensor VSS included inacronymCircuit High VoltageVehicle Speed Sensor VSS included inacronymCircuit IntermittentHeated Oxygen Sensor HO2S included inAcronymHeaterCircuitHeated Oxygen Sensor HO2S included inAcronymHeater Circuit Low Voltage Bank (B1)Sensor 1 (S1)Idle Air Control IAC Valve Circuit Low VoltageMass Air Flow MAF Sensor Circuit High FrequencyMass Air Flow MAF Sensor Circuit PerformanceKnock Sensor KS included inacronymModule SensorCircuit Bank 1Knock Sensor KS included inacronymModule SensorCircuit PerformanceCrankshaft Position CKP Sensor CircuitEvaporative Emissions EVAP CanisterPurgeValve CircuitEngine Speed RPM Input CircuitAir Conditioning A/C ClutchStatusN/A Circuit Low VoltageHeated Oxygen Sensor HO2S Circuit TransitionTime Ratio Bank 1 (B1) Sensor (S1)Heated Oxygen Sensor HO2S Circuit Insufficient SwitchingBank 1 (B1)Sensor 1 (S1)Distributor Ignition DI Low ResolutionCircuitIntermittentDistributor IgnitionDIHigh Resolution CircuitNOTE 1) The Service Information uses Component/System from SAE J1930 or Acronym from SAE J1930, Modifier, Noun Name, Circuit, Intermittent, State, Parameter, and Location.TABLE A2—DTC NAMING GUIDELINES FOR SIGNALS TO COMPONENTSComponent/SystemSAE J19301)Acronym SAE J19301)Modifier (if used)1)Noun Name1)Control 1)Circuit 1)Intermittent (if used) 1)State (if used)1)Parameter (if used) 1)Location (if used) 1)Malfunction Indicator lamp MIL included in acronymControl Circuit Injector N/A Control Circuit Fan Control FC Relay 1Control Circuit Fan Control FC Relay 2Control Circuit Low Exhaust Gas RecirculationEGR Solenoid Control Circuit High Secondary Air Injection AIR Solenoid Control Circuit HighEvaporative Emissions EVAP Purge Solenoid Control Circuit Air Conditioning A/C ClutchRelay Control Circuit Idle Air Control IAC Valve Control Circuit Low Ignition Control IC N/A included in acronym Circuit Low Voltage Ignition ControlIC N/A included in acronym Circuit High VoltageTorque Converter ClutchTCCSolenoidControlCircuitStuck onNOTE 1) The Service Information uses Component/System from SAE J1930 or Acronym from SAE J1930, Modifier, Noun Name, Circuit, Intermittent, State, Parameter, and Location.TABLE A3—DTC NAMING GUIDELINES INVOLVING SEVERAL COMPONENTS OR SYSTEMSComponent/SystemSAE J19301)Acronym SAE J19301)Modifier 1)System 1)Intermittent 1)State 1)Parameter 1)Location 1)Exhaust Gas Recirculation EGR System Fuel TrimFT System LeanBank 1Secondary Air InjectionAIRSystemBank 1NOTE 1) The Service Information uses Component/System from SAE J1930 or Acronym from SAE J1930, Modifier, Noun Name, Circuit, Intermittent, State, Parameter, and Location.TABLE A1—DTC NAMING GUIDELINES FOR SIGNALS FROM COMPONENTSComponent/SystemSAE J19301)Acronym SAEJ19301)Modifier (if used) 1)Noun Name 1Circuit1)Intermittent (if used) 1)State (if used) 1)Parameter (if used) 1)Location (if used) 1)APPENDIX B(NORMATIVE)POWERTRAIN SYSTEM DIAGNOSTIC TROUBLE CODEB.1P00XX Fuel and Air Metering and Auxiliary Emission ControlsTABLE B1—P00XX FUEL AND AIR METERING AND AUXILIARY EMISSION CONTROLS DTC number DTC naming Location P0001 Fuel Volume Regulator Control Circuit/OpenP0002 Fuel Volume Regulator Control Circuit Range/PerformanceP0003 Fuel Volume Regulator Control Circuit LowP0004 Fuel Volume Regulator Control Circuit HighP0005 Fuel Shutoff Valve "A" Control Circuit/OpenP0006 Fuel Shutoff Valve "A" Control Circuit LowP0007 Fuel Shutoff Valve "A" Control Circuit HighP0008 Engine Position System Performance Bank 1 P0009 Engine Position System Performance Bank 2 P0010 a) "A" Camshaft Position Actuator Circuit Bank 1 P0011 a) "A" Camshaft Position - Timing Over-Advanced or System Performance Bank 1 P0012 a) "A" Camshaft Position - Timing Over-Retarded Bank 1 P0013 b) "B" Camshaft Position - Actuator Circuit Bank 1 P0014 b) "B" Camshaft Position - Timing Over-Advanced or System Performance Bank 1 P0015 b) "B" Camshaft Position - Timing Over-Retarded Bank 1 P0016 Crankshaft Position – Camshaft Position Correlation Bank 1 Sensor A P0017 Crankshaft Position – Camshaft Position Correlation Bank 1 Sensor B P0018 Crankshaft Position – Camshaft Position Correlation Bank 2 Sensor A P0019 Crankshaft Position – Camshaft Position Correlation Bank 2 Sensor B P0020 a) "A" Camshaft Position Actuator Circuit Bank 2 P0021 a) "A" Camshaft Position - Timing Over-Advanced or System Performance Bank 2 P0022 a) "A" Camshaft Position - Timing Over-Retarded Bank 2 P0023 b) "B" Camshaft Position - Actuator Circuit Bank 2 P0024 b) "B" Camshaft Position - Timing Over-Advanced or System Performance Bank 2 P0025 b) "B" Camshaft Position - Timing Over-Retarded Bank 2 P0026 Intake Valve Control Solenoid Circuit Range/Performance Bank 1 P0027 Exhaust Valve Control Solenoid Circuit Range/Performance Bank 1 P0028 Intake Valve Control Solenoid Circuit Range/Performance Bank 2 P0029 Exhaust Valve Control Solenoid Circuit Range/Performance Bank 2 P0030 HO2S Heater Control Circuit Bank 1 Sensor 1 P0031 HO2S Heater Control Circuit Low Bank 1 Sensor 1 P0032 HO2S Heater Control Circuit High Bank 1 Sensor 1 P0033 Turbo Charger Bypass Valve Control CircuitP0034 Turbo Charger Bypass Valve Control Circuit LowP0035 Turbo Charger Bypass Valve Control Circuit HighP0036 HO2S Heater Control Circuit Bank 1 Sensor 2TABLE B1—P00XX FUEL AND AIR METERING AND AUXILIARY EMISSION CONTROLS (CONTINUED) DTC number DTC naming Location P0037 HO2S Heater Control Circuit Low Bank 1 Sensor 2 P0038 HO2S Heater Control Circuit High Bank 1 Sensor 2 P0039 Turbo/Super Charger Bypass Valve Control Circuit Range/PerformanceP0040 O2 Sensor Signals Swapped Bank 1 Sensor 1/ Bank 2 Sensor 1P0041 O2 Sensor Signals Swapped Bank 1 Sensor 2/ Bank 2 Sensor 2P0042 HO2S Heater Control Circuit Bank 1 Sensor 3 P0043 HO2S Heater Control Circuit Low Bank 1 Sensor 3 P0044 HO2S Heater Control Circuit High Bank 1 Sensor 3 P0045 Turbo/Super Charger Boost Control Solenoid Circuit/OpenP0046 Turbo/Super Charger Boost Control Solenoid Circuit Range/PerformanceP0047 Turbo/Super Charger Boost Control Solenoid Circuit LowP0048 Turbo/Super Charger Boost Control Solenoid Circuit HighP0049 Turbo/Super Charger Turbine OverspeedP0050 HO2S Heater Control Circuit Bank 2 Sensor 1 P0051 HO2S Heater Control Circuit Low Bank 2 Sensor 1 P0052 HO2S Heater Control Circuit High Bank 2 Sensor 1 P0053 HO2S Heater Resistance Bank 1 Sensor 1 P0054 HO2S Heater Resistance Bank 1 Sensor 2 P0055 HO2S Heater Resistance Bank 1 Sensor 3 P0056 HO2S Heater Control Circuit Bank 2 Sensor 2 P0057 HO2S Heater Control Circuit Low Bank 2 Sensor 2 P0058 HO2S Heater Control Circuit High Bank 2 Sensor 2 P0059 HO2S Heater Resistance Bank 2 Sensor 1 P0060 HO2S Heater Resistance Bank 2 Sensor 2 P0061 HO2S Heater Resistance Bank 2 Sensor 3 P0062 HO2S Heater Control Circuit Bank 2 Sensor 3 P0063 HO2S Heater Control Circuit Low Bank 2 Sensor 3 P0064 HO2S Heater Control Circuit High Bank 2 Sensor 3 P0065 Air Assisted Injector Control Range/PerformanceP0066 Air Assisted Injector Control Circuit or Circuit LowP0067 Air Assisted Injector Control Circuit HighP0068 MAP/MAF – Throttle Position CorrelationP0069 Manifold Absolute Pressure – Barometric Pressure CorrelationP0070 Ambient Air Temperature Sensor CircuitP0071 Ambient Air Temperature Sensor Range/PerformanceP0072 Ambient Air Temperature Sensor Circuit LowP0073 Ambient Air Temperature Sensor Circuit HighP0074 Ambient Air Temperature Sensor Circuit IntermittentP0075 Intake Valve Control Solenoid Circuit Bank 1 P0076 Intake Valve Control Solenoid Circuit Low Bank 1 P0077 Intake Valve Control Solenoid Circuit High Bank 1 P0078 Exhaust Valve Control Solenoid Circuit Bank 1 P0079 Exhaust Valve Control Solenoid Circuit Low Bank 1。
LetPub-JCR2012-期刊

0239-7528 1851-2372 1224-2780 2146-3123 1860-5397 1876-2883 1757-6180 1369-703X 1934-8630 0791-7945 1996-3599 0324-1130 0525-1931 0144-8617 0008-6223 1897-5593 1664-3828 1634-0744 1842-4090 2044-4753 0920-5861 1933-6918 2045-3701 1478-811X 2228-5806 2211-1247 0008-8846 1895-1066 1733-7178 2081-9900 1868-4904 0008-8994 0272-8842 0862-5468 0173-9913 1584-8663 0352-9568 1612-1872 1752-153X 1359-7345 0275-7540 0098-6445 1385-8947 0009-2347 0255-2701 0360-7275 0263-8762 0009-2509 0930-7516 0009-2460 0009-3122 1451-9372 0009-3068 0251-0790
B POL ACAD SCI-TECH B SOC ARGENT BOT BALK J GEOM APPL BALK MED J BEILSTEIN J ORG CHEM BENEF MICROBES BIOANALYSIS BIOCHEM ENG J BIOINTERPHASES BIOL ENVIRON BUILD SIMUL-CHINA BULG CHEM COMMUN BUNSEKI KAGAKU CARBOHYD POLYM CARBON CARDIOL J CARDIORENAL MED CARNETS GEOL CARPATH J EARTH ENV CATAL SCI TECHNOL CATAL TODAY CELL ADHES MIGR CELL BIOSCI CELL COMMUN SIGNAL CELL J CELL REP CEMENT CONCRETE RES CENT EUR J CHEM CENT EUR J ENERG MAT CENT EUR J GEOSCI CENT EUR NEUROSURG CENTAURUS CERAM INT CERAM-SILIKATY CFI-CERAM FORUM INT CHALCOGENIDE LETT CHEM BIOCHEM ENG Q CHEM BIODIVERS CHEM CENT J CHEM COMMUN CHEM ECOL CHEM ENG COMMUN CHEM ENG J CHEM ENG NEWS CHEM ENG PROCESS CHEM ENG PROG CHEM ENG RES DES CHEM ENG SCI CHEM ENG TECHNOL CHEM ENG-NEW YORK CHEM HETEROCYCL COM+ CHEM IND CHEM ENG Q CHEM IND-LONDON CHEM J CHINESE U
阿齐沙坦油水分配系数的测定_米楠

Drug Evaluation Research第36卷第6期2013年12月- 452 -阿齐沙坦油水分配系数的测定米楠,苏慕君,臧可昕天津药物研究院,天津 300193摘要:目的测定阿齐沙坦的油水分配系数。
方法配制不同pH值的磷酸盐缓冲液,以正辛醇-磷酸盐缓冲液作为分散系统,摇瓶法作为测定方法,照紫外-可见分光光度法(《中国药典》2010年版附录ⅣA)进行测定。
通过阿齐沙坦分配平衡后在油相(正辛醇)和水相的浓度比,计算油水分配系数。
结果在正辛醇-磷酸盐缓冲液体系中,pH=3.0时阿齐沙坦的油水分配系数为3.78,pH=7.0时阿齐沙坦的油水分配系数为−0.30。
结论应用摇瓶-紫外分光光度法,能够准确测定阿齐沙坦的油水分配系数,并由此推测其体内过程。
关键词:阿齐沙坦;油水分配系数;紫外分光光度法中图分类号:R94 文献标志码:A 文章编号:1674 - 6376 (2013) 06 - 0452 - 03DOI: 10.7501/j.issn.1674-6376.2013.06.012Determination of oil-water partition coefficient of AzilsartanMI Nan, SU Mu-jun, ZANG Ke-xinTianjin Institute of Pharmaceutical Research, Tianjin 300193, ChinaAbstract:Objective To determine the oil-water partition coefficient of Azilsartan. Methods A shake flask-ultraviolet spectrophotometry method was applied to determining the oil-water partition coefficient of Azilsartan in n-octanol-buffer solution systems with different pH values. Results The Lg P of Azilsartan under pH 3.0 was 3.78 and pH 7.0 was −0.30. Conclusion The shake flask-ultraviolet spectrophotometry method can be used to determine the oil-water partition coefficient of Azilsartan, and help to predict the in vivo process.Key words: Azilsartan; oil-water partition coefficient; ultraviolet spectrophotometry阿齐沙坦(Azilsartan)是新一代选择性AT1亚型血管紧张素Ⅱ受体拮抗剂(ARBs)类抗高血压药,由日本武田制药公司研制,于2012年1月获得在日本的上市批准。
美国2012年EPA
2012 Edition of the Drinking Water Standards and Health Advisories2012 Edition of the Drinking Water Standards and Health AdvisoriesEPA 822-S-12-001Office of WaterU.S. Environmental Protection AgencyWashington, DCSpring 2012Date of update: April, 2012Recycled/RecyclablePrinted on paper that containsat least 50% recycled fiber.Spring 2012 Page iii of vi The Health Advisory (HA) Program, sponsored by the EPA’s Office of Water (OW), publishes concentrations of drinking water contaminants at Drinking Water Specific Risk Level Concentration for cancer (10-4 Cancer Risk) and concentrations of drinking water contaminants at which noncancer adverse health effects are not anticipated to occur over specific exposure durations - One-day, Ten-day, and Lifetime - in the Drinking Water Standards and Health Advisories (DWSHA) tables. The One-day and Ten-day HAs are for a 10 kg child and the Lifetime HA is for a 70 kg adult. The daily drinking water consumption for the 10 kg child and 70 kg adult are assumed to be 1 L/day and 2 L/day, respectively. The Lifetime HA for the drinking water contaminant is calculated from its associated Drinking Water Equivalent Level (DWEL), obtained from its RfD, and incorporates a drinking water Relative Source Contribution (RSC) factor of contaminant-specific data or a default of 20% of total exposure from all sources. Maximum Contaminant Levels (MCLs) and Maximum Contaminant Level Goals (MCLGs) for some regulated drinking water contaminants are also published.HAs serve as the informal technical guidance for unregulated drinking water contaminants to assist Federal, State and local officials, and managers of public or community water systems in protecting public health as needed. They are not to be construed as legally enforceable Federal standards. EPA’s OW has provided MCL, MCLGs, RfDs, One-Day HAs, Ten-day HAs, DWELs, and Lifetime HAs. Drinking Water Specific Risk Level Concentration for cancer (10-4 Cancer Risk), and Cancer Descriptors in the DWSHA tables. HAs are intended to protect against noncancer effects. The 10-4 Cancer Risk level provides information concerning cancer effects. The MCL values for specific drinking water contaminants must be used for regulated contaminants in public drinking water systems.The DWSHA tables are revised periodically by the OW so that the benchmark values are consistent with the most current Agency assessments. Reference dose (RfD) values are updated to reflect the values in the Integrated Risk Information System (IRIS) and the Office of Pesticide Programs (OPP) Reregistration Eligibility Decisions (REDs) documents. The associated DWEL is recalculated accordingly.A Lifetime noncancer benchmark is made available to risk assessment managers for comparison to the cancer risk level drinking water concentration (10-4 Cancer Risk) and to determine whether the noncancer Lifetime HA or the cancer risk level drinking water concentration provides a more meaningful scenario-specific risk reduction. In this regard, the Office of Water defines the Lifetime HA as the concentration in drinking water that is not expected to cause any adverse noncarcinogenic effects for a lifetime of exposure, whereas the 10-4 Cancer Risk is the concentration of the chemical contaminant in drinking water that is associated with a specific probability of cancer. The Office of Water also advises consideration of the more conservative cancer risk levels (10-5, 10-6), found in the IRIS or OPP RED source documents, if it is considered more appropriate for exposure-specific risk assessment.iiiSpring 2012 Page iv of vi Many of the values on the DWSHA tables have been revised since the original HAs were published. Revised RfDs, 10-4 Cancer Risk values, and cancer designations or descriptors obtained from Integrated Risk Information System (IRIS), and One-day and Ten-dayHealth Advisories are presented in BOLD type. Revised RfDs, 10-4 Cancer Risk values, and cancer designations or descriptors obtained from Office of Pesticide Program’sRegistration Eligibility Decision (OPP RED) are presented in BOLD ITALICS type.The summaries of IRIS Toxicological Reviews from which the RfDs and cancerbenchmarks, as well as the associated narratives and references can be accessed at:/IRIS. Those from OPP REDs can be accessed at:/pesticides/reregistration/status.htm.In some cases, there is an HA value for a contaminant but there is no reference to an HA document. Such HA values can be found in the Drinking Water Criteria Document forthe contaminant.With a few exceptions, the RfDs, Health Advisories, and Cancer Risk values have beenrounded to one significant figure following the convention adopted by IRIS.For unregulated chemicals with current IRIS or OPP REDs RfDs, the Lifetime HealthAdvisories are calculated from the associated DWELs, using the RSC values published in the HA documents for the contaminants.The DWSHA tables may be reached from the Water Science home page at:/waterscience/. The DWSHA tables are accessed under the Drinking Water icon.Copies the Tables may be ordered free of charge fromSAFE DRINKING WATER HOTLINE1-800-426-4791Monday thru Friday, 9:00 AM to 5:30 PM ESTivSpring 2012 Page v of vi DEFINITIONSThe following definitions for terms used in the DWSHA tables are not all-encompassing, and should not be construed to be “official” definitions. They are intended to assist the user in understanding terms used in the DWSHA tables.Action Level: The concentration of a contaminant which, if exceeded, triggers treatment or other requirements which a water system must follow. For example, it is the level of lead or copper which, if exceeded in over 10% of the homes tested, triggers treatment for corrosion control. Cancer Classification: A descriptive weight-of-evidence judgment as to the likelihood that an agent is a human carcinogen and the conditions under which the carcinogenic effects may be expressed. Under the 2005 EPA Guidelines for Carcinogen Risk Assessment, Cancer Descriptors replace the earlier alpha numeric Cancer Group designations (US EPA 1986 guidelines). The Cancer Descriptors in the 2005 EPA Guidelines for Carcinogen Risk Assessment are as follows: •“carcinogenic to humans” (H)•“likely to be carcinogenic to humans” (L)•“likely to be carcinogenic above a specified dose but not likely to be carcinogenic below that dose because a key event in tumor formation does not occur below that dose” (L/N) •“suggestive evidence of carcinogenic potential” (S)•“inadequate information to assess carcinogenic potential” (I)•“not likely to be carcinogenic to humans” (N)The letter abbreviations provided parenthetically above are now used in the DWSHA tables in place of the prior alpha numeric identifiers for chemicals that have been evaluated under the new guidelines (the 2005 guidelines or the 1996 and 1999 draft guidelines) or whose records in the DWSHA tables have been revised.Cancer Group: A qualitative weight-of-evidence judgment as to the likelihood that a chemical may be a carcinogen for humans. Each chemical was placed into one of the following five categories (US EPA 1986 guidelines). The Cancer Group designations are given in the Tables for chemicals that have not yet been evaluated under the new guidelines or whose records in the DWSHA tables have been revised.Group CategoryA Human carcinogenB Probable human carcinogen:B1 indicates limited human evidencevSpring 2012 Page vi of vi B2 indicates sufficient evidence in animals and inadequate or no evidence in humansC Possible human carcinogenD Not classifiable as to human carcinogenicityE Evidence of noncarcinogenicity for humans10-4 Cancer Risk: The concentration of a chemical in drinking water corresponding to an excess estimated lifetime cancer risk of 1 in 10,000.Drinking Water Advisory: A nonregulatory concentration of a contaminant in water that is likely to be without adverse effects on health and aesthetics for the period it is derived.DWEL: Drinking Water Equivalent Level. A DWEL is a drinking water lifetime exposure level, assuming 100% exposure from that medium, at which adverse, noncarcinogenic health effects would not be expected to occur.HA: Health Advisory. An estimate of acceptable drinking water levels for a chemical substance based on health effects information; an HA is not a legally enforceable Federal standard, but serves as technical guidance to assist Federal, State, and local officials.One-Day HA: The concentration of a chemical in drinking water that is not expected to cause any adverse noncarcinogenic effects for up to one day of exposure. The One-Day HA is intended o protect a 10-kg child consuming 1 liter of water per day.Ten-Day HA: The concentration of a chemical in drinking water that is not expected to cause any adverse noncarcinogenic effects for up to ten days of exposure. The Ten-Day HA is also intended to protect a 10-kg child consuming 1 liter of water per day.Lifetime HA: The concentration of a chemical in drinking water that is not expected tocause any adverse noncarcinogenic effects for a lifetime of exposure, incorporating adrinking water RSC factor of contaminant-specific data or a default of 20% of totalexposure from all sources. The Lifetime HA is based on exposure of a 70-kg adultconsuming 2 liters of water per day. For Lifetime HAs developed for drinking watercontaminants before the Lifetime HA policy change to develop Lifetime HAs for alldrinking water contaminants regardless of carcinogenicity status in this DWSHA update, the Lifetime HA for Group C carcinogens, as indicated by the 1986 Cancer Guidelines,includes an uncertainty adjustment factor of 10 for possible carcinogenicity.MCLG: Maximum Contaminant Level Goal. A non-enforceable health benchmark goal which is set at a level at which no known or anticipated adverse effect on the health of persons is expected to occur and which allows an adequate margin of safety.viSpring 2012 Page vii of vi MCL: Maximum Contaminant Level. The highest level of a contaminant that is allowed in drinking water. MCLs are set as close to the MCLG as feasible using the best available analytical and treatment technologies and taking cost into consideration. MCLs are enforceable standards. Oral cancer slope factor: The slope factor is the result of application of a low-dose extrapolation procedure and is presented as the risk per (mg/kg)/day.RfD: Reference Dose. An estimate (with uncertainty spanning perhaps an order of magnitude) of a daily oral exposure to the human population (including sensitive subgroups) that is likely to be without an appreciable risk of deleterious effects during a lifetime.Risk Specific Level Concentration: The concentration of the chemical contaminant in drinking water or air providing cancer risks of 1 in 10,000, 1 in 100,000, or 1 in 100,000,000.SDWR: Secondary Drinking Water Regulations. Non-enforceable Federal guidelines regarding cosmetic effects (such as tooth or skin discoloration) or aesthetic effects (such as taste, odor, or color) of drinking water.TT: Treatment Technique. A required process intended to reduce the level of a contaminant in drinking water.Unit Risk: The unit risk is the quantitative estimate in terms of either risk per µg/L drinking water or risk per µg/m3 air breathed.viiSpring 2012 Page viii of vi ABBREVIATIONSD DraftDWEL Drinking Water Equivalent LevelDWSHA Drinking Water Standards and Health AdvisoriesF FinalHA Health AdvisoryI InterimIRIS Integrated Risk Information SystemMCL Maximum Contaminant LevelMCLG Maximum Contaminant Level GoalNA Not ApplicableNOAEL No-Observed-Adverse-Effect LevelOPP Office of Pesticide ProgramsOW Office of WaterP ProposedPv ProvisionalRED Registration Eligibility DecisionReg RegulationRfD Reference DoseTT Treatment Techniqueviii。
ANSI AAMI PB70-2012防护服液态阻隔性能等级

ANSI/AAMI PB70:2012防护服液态阻隔性能等级随着美国新冠疫情全面蔓延,感染人数持续增长,美国本土对防护服等感染防护产品的需求也日益增长。
防护服进入美国市场需要满足一个非常重要的标准ANSI/AAMIPB70:2012美国国家标准ASNI/AAMI PB70:2012 《医疗保健设施中使用的防护服和防护布的液体阻挡层性能和分类》(Liquid barrier performance and classification of protective apparel and drapes intended for use in health care facilities) 针对用于医疗保健设施的各种服装设立了最低阻隔性能要求、分类系统以及相关的标签要求。
该标准的阻隔性能要求涵盖手术单,悬垂配件以及所有类型的带有液体屏障声明或液体传播的微生物屏障声明的防护服装(例如一次性和多次使用的手术服,去污服,隔离服,围裙,袖套和实验室服装)。
隔离服手术服ASNI/AAMI PB70:2012标准不包括防护服中手的部位(如手术手套、病人检验手套以及其他医用手套),防护服中手、脸、眼睛部位(如眼罩、面罩、手术帽或者头罩、手术口罩以及呼吸器),防护服的脚部(如手术室的鞋、鞋套、手术靴)。
目前市面上销售上的防护服主要依据ASNI/AAMI PB70对产品进行了四个级别的分类:根据标准化测试结果,定义了四个级别的屏障性能,级别1是最低的保护级别,级别等级测试液体阻隔结果预期的阻隔性能Level 1 AATCC 42 水<4.5g 最小的耐水性Level 2 AATCC 42 水<1.0g 低耐水性AATCC 127 >20cmLevel 3 AATCC 42 水<1.0g 中耐水性AATCC 127 >50cmLevel 4 ASTM F1670 替代血2psi下无渗透血液和病毒的渗透阻力(2psi)ASTM F1671 噬菌体2psi下无渗透从表1中可以看出,Level 1-Level 3均采用了AATCC 42冲击渗水性测试和AATCC 127静水压测试,而Level 4选用的测试方法为合成血液穿透试验ASTM F1670和病毒渗透试验ASTM F1671。
AP2012MBC资料

DATE: MAR/11/2005 DRAWN: Y.W.WANG
PAGE: 2 OF 4 ERP:1203000119
元器件交易网
Blue
AP2012MBC
SPEC NO: DSAD0942 APPROVED: J. Lu
REV NO: V.3 CHECKED: Allen Liu
SPEC NO: DSAD0942 APPROVED: J. Lu
REV NO: V.3 CHECKED: Allen Liu
DATE: MAR/11/2005 DRAWN: Y.W.WANG
PAGE: 1 OF 4 ERP:1203000119
元器件交易网
Selection Guide
Note: 1. 1/10 Duty Cycle, 0.1ms Pulse Width.
Blue 105 30 150 5 -40°C To +85°C
Units mW mA mA V
SPEC NO: DSAD0942 APPROVED: J. Lu
REV NO: V.3 CHECKED: Allen Liu
元器件交易网
2.0x1.25mm SMD CHIP LED LAMP
ATTENTION
OBSERVE PRECAUTIONS FOR HANDLING ELECTROSTATIC DISCHARGE SENSITIVE DEVICES
AP2012MBC
BLUE
Features
Absolute Maximum Ratings at TA=25°C
Parameter Power dissipation DC Forward Current Peak Forward Current [1] Reverse Voltage Operating / Storage Temperature
世界卫生组织儿童标准处方集
WHO Model Formulary for ChildrenBased on the Second Model List of Essential Medicines for Children 2009世界卫生组织儿童标准处方集基于2009年儿童基本用药的第二个标准目录WHO Library Cataloguing-in-Publication Data:WHO model formulary for children 2010.Based on the second model list of essential medicines for children 2009.1.Essential drugs.2.Formularies.3.Pharmaceutical preparations.4.Child.5.Drug utilization. I.World Health Organization.ISBN 978 92 4 159932 0 (NLM classification: QV 55)世界卫生组织实验室出版数据目录:世界卫生组织儿童标准处方集基于2009年儿童基本用药的第二个标准处方集1.基本药物 2.处方一览表 3.药品制备 4儿童 5.药物ISBN 978 92 4 159932 0 (美国国立医学图书馆分类:QV55)World Health Organization 2010All rights reserved. Publications of the World Health Organization can be obtained fromWHO Press, World Health Organization, 20 Avenue Appia, 1211 Geneva 27, Switzerland (tel.: +41 22 791 3264; fax: +41 22 791 4857; e-mail: ******************). Requests for permission to reproduce or translate WHO publications – whether for sale or for noncommercial distribution – should be addressed to WHO Press, at the aboveaddress(fax:+41227914806;e-mail:*******************).世界卫生组织2010版权所有。
BQ2012资料
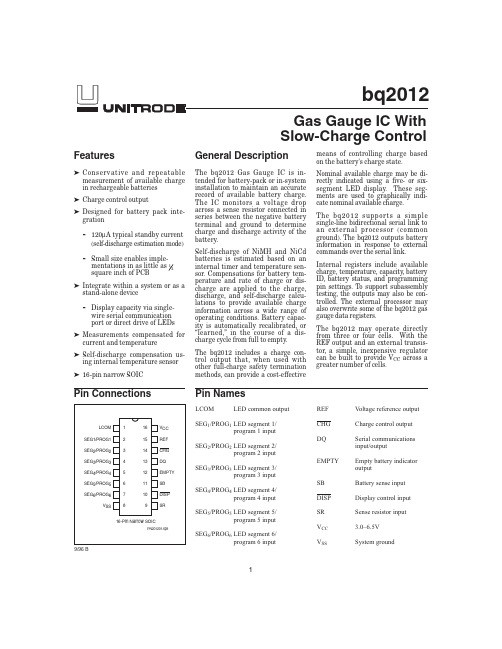
1Features➤Conservative and repeatable measurement of available charge in rechargeable batteries ➤Charge control output➤Designed for battery pack inte-gration-120µA typical standby current (self-discharge estimation mode)-Small size enables imple-mentations in as little as 12square inch of PCB➤Integrate within a system or as a stand-alone device-Display capacity via single-wire serial communication port or direct drive of LEDs➤Measurements compensated for current and temperature ➤Self-discharge compensation us-ing internal temperature sensor ➤16-pin narrow SOICGeneral DescriptionThe bq2012Gas Gauge IC is in-tended for battery-pack or in-system installation to maintain an accurate record of available battery charge.The IC monitors a voltage drop across a sense resistor connected in series between the negative battery terminal and ground to determine charge and discharge activity of the battery .Self-discharge of NiMH and NiCd batteries is estimated based on an internal timer and temperature pensations for battery tem-perature and rate of charge or dis-charge are applied to the charge,discharge,and self-discharge calcu-lations to provide available charge information across a wide range of operating conditions.Battery capac-ity is automatically recalibrated,or “learned,”in the course of a dis-charge cycle from full to empty .The bq2012includes a charge con-trol output that,when used with other full-charge safety termination methods,can provide a cost-effectivemeans of controlling charge based on the battery's charge state.Nominal available charge may be di-rectly indicated using a five-or six-segment LED display.These seg-ments are used to graphically indi-cate nominal available charge.The bq2012supports a simple single-line bidirectional serial link to an external processor (common ground).The bq2012outputs battery information in response to external commands over the serial link.Internal registers include available charge,temperature,capacity ,battery ID,battery status,and programming pin settings.To support subassembly testing,the outputs may also be con-trolled.The external processor may also overwrite some of the bq2012gas gauge data registers.The bq2012may operate directly from three or four cells.With the REF output and an external transis-tor,a simple,inexpensive regulator can be built to provide V CC across a greater number of cells.LCOMLED common outputSEG 1/PROG 1LED segment 1/program 1input SEG 2/PROG 2LED segment 2/program 2input SEG 3/PROG 3LED segment 3/program 3input SEG 4/PROG 4LED segment 4/program 4input SEG 5/PROG 5LED segment 5/program 5input SEG 6/PROG 6LED segment 6/program 6input1PN201201.eps16-Pin Narrow SOIC234 5678161514131211109LCOMSEG 1/PROG 1SEG 2/PROG 2SEG 3/PROG 3SEG 4/PROG 4SEG 5/PROG5SEG 6/PROG 6V SSV CC REF CHG DQ EMPTY SB DISP SRREF V oltage reference output CHG Charge control output DQ Serial communications input/outputEMPTY Empty battery indicator outputSB Battery sense input DISP Display control input SR Sense resistor input V CC 3.0–6.5V V SSSystem groundPin Connections Pin Namesbq2012Gas Gauge IC With Slow-Charge Control9/96 BPin DescriptionsLCOM LED common outputOpen-drain output switches V CC to sourcecurrent for the LEDs.The switch is off dur-ing initialization to allow reading of the softpull-up or pull-down program resistors.LCOM is also high impedance when the dis-play is off.SEG1–SEG6LED display segment outputs(dual func-tion with PROG1–PROG6)Each output may activate an LED to sink the current sourced from LCOM.PROG1–PROG2Programmed full count selection inputs (dual function with SEG1–SEG2)These three-level input pins define the pro-grammed full count(PFC)thresholds de-scribed in Table2.PROG3–PROG4Gas gauge rate selection inputs(dual function with SEG3–SEG4)These three-level input pins define the scale factor described in Table2.PROG5Self-discharge rate selection(dual func-tion with SEG5)This three-level input pin defines the selfdis-charge compensation rate shown in Table1. PROG6Display mode selection(dual function with SEG6)This three-level pin defines the display op-eration shown in Table1.CHG Charge control outputThis open-drain output becomes active lowwhen charging is allowed.Valid chargingconditions are described in the Charge Con-trol section.SR Sense resistor inputThe voltage drop(V SR)across the sense re-sistor R S is monitored and integrated overtime to interpret charge and discharge activ-ity.The SR input is tied to the high side ofthe sense resistor.V SR<V SS indicates dis-charge,and V SR>V SS indicates charge.Theeffective voltage drop(V SRO)as seen by thebq2012is V SR+V OS(see Table5).DISP Display control inputDISP high disables the LED display.DISPtied to V CC allows PROG X to connect directlyto V CC or V SS instead of through a pull-up orpull-down resistor.DISP floating allows theLED display to be active during a validcharge or during discharge if the NAC regis-ter is updated at a rate equivalent to V SRO≤-4mV.DISP low activates the display.SeeTable1.SB Secondary battery inputThis input monitors the single-cell voltagepotential through a high-impedance resis-tive divider network for end-of-dischargevoltage(EDV)thresholds,maximum chargevoltage(MCV),and battery removed.EMPTY Battery empty outputThis open-drain output becomes high-impedance on detection of a valid end-of-discharge voltage(V EDVF)and is low followingthe next application of a valid charge.DQ Serial I/O pinThis is an open-drain bidirectional pin.REF Voltage reference output for regulatorREF provides a voltage reference output foran optional micro-regulator.V CC Supply voltage inputV SS Ground2bq2012Functional DescriptionGeneral OperationThe bq2012determines battery capacity by monitoring the amount of charge input to or removed from a re-chargeable battery.The bq2012measures discharge and charge currents,estimates self-discharge,monitors the battery for low-battery voltage thresholds,and compen-sates for temperature and charge/discharge rates.The charge measurement is made by monitoring the voltage across a small-value series sense resistor between the negative battery terminal and ground.The available battery charge is determined by monitoring this voltage over time and correcting the measurement for the envi-ronmental and operating conditions.Figure1shows a typical battery pack application of the bq2012using the LED display capability as a charge-state indicator.The bq2012can be configured to display capacity in either a relative or an absolute display mode.The relative display mode uses the last measured dis-charge capacity of the battery as the battery“full”refer-ence.The absolute display mode uses the programmed full count(PFC)as the full reference,forcing each seg-ment of the display to represent a fixed amount of charge.A push-button display feature is available for momentarily enabling the LED display.The bq2012monitors the charge and discharge currents as a voltage across a sense resistor(see R S in Figure1).A filter between the negative battery terminal and theSR pin may be required if the rate of change of the bat-tery current is too great.3bq2012Figure 1. Battery Pack Application Diagram—LED DisplayVoltage ThresholdsIn conjunction with monitoring V SR for charge/discharge currents,the bq2012monitors the single-cell battery po-tential through the SB pin.The single-cell voltage po-tential is determined through a resistor/divider network per the following equation:RB RB N 121=−where N is the number of cells,RB 1is connected to the positive battery terminal,and RB 2is connected to the negative battery terminal.The single-cell battery volt-age is monitored for the end-of-discharge voltage (EDV)and for maximum cell voltage (MCV).EDV threshold levels are used to determine when the battery has reached an “empty”state,and the MCV threshold is used for fault detection during charging.Two EDV thresholds for the bq2012are fixed at:EDV1(early warning)=1.05V EDVF (empty)=0.95VIf V SB is below either of the two EDV thresholds,the as-sociated flag is latched and remains latched,independ-ent of V SB ,until the next valid charge.During discharge and charge,the bq2012monitors V SR for various thresholds.These thresholds are used to compensate the charge and discharge rates.Refer to the count compensation section for details.EDV monitoring is disabled if V SR ≤-250mV typical andresumes sec-ond after V SR >-250mV .EMPTY OutputThe EMPTY output switches to high impedance when V SB <V EDF and remains latched until a valid charge oc-curs.The bq2012also monitors V SB relative to V MCV ,2.25V .V SB falling from above V MCV resets the device.ResetThe bq2012recognizes a valid battery whenever V SB is greater than 0.1V typical.V SB rising from below 0.25V or falling from above 2.25V resets the device.Reset can also be accomplished with a command over the serial port as described in the Register Reset section.TemperatureThe bq2012internally determines the temperature in 10°C steps centered from -35°C to +85°C.The tempera-ture steps are used to adapt charge and discharge rate compensations,self-discharge counting,and available charge display translation.The temperature range isavailable over the serial port in 10°C increments as shown below:Layout ConsiderationsThe bq2012measures the voltage differential between the SR and V SS pins.V OS (the offset voltage at the SR pin)is greatly affected by PC board layout.For optimal results,the PC board layout should follow the strict rule of a single-point ground return.Sharing high-current ground with small signal ground causes undesirable noise on the small signal nodes.Additionally:IThe capacitors (SB and V CC ) should be placed asclose as possible to the SB and V CC pins, respectively,and their paths to V SS should be as short as possible.A high-quality ceramic capacitor of 0.1µf is recommended for V CC .IThe sense resistor (R S ) should be as close as possible to the bq2012.IThe R-C on the SR pin should be located as close as possible to the SR pin. The maximum R should not exceed 100K.4bq2012TMPGG (hex)Temperature Range0x < -30°C 1x -30°C to -20°C 2x -20°C to -10°C 3x -10°C to 0°C 4x 0°C to 10°C 5x 10°C to 20°C 6x 20°C to 30°C 7x 30°C to 40°C 8x 40°C to 50°C 9x 50°C to 60°C Ax 60°C to 70°C Bx 70°C to 80°C Cx> 80°CGas Gauge OperationThe operational overview diagram in Figure2illustrates the operation of the bq2012.The bq2012accumulates a measure of charge and discharge currents,as well as an estimation of self-discharge.Charge and discharge cur-rents are temperature and rate compensated,whereas self-discharge is only temperature compensated.The main counter,Nominal Available Charge(NAC), represents the available battery capacity at any given time.Battery charging increments the NAC register, while battery discharging and self-discharge decrement the NAC register and increment the DCR(Discharge Count Register).The Discharge Count Register(DCR)is used to update the Last Measured Discharge(LMD)register only if a complete battery discharge from full to empty occurs without any partial battery charges.Therefore,the bq2012adapts its capacity determination based on the actual conditions of discharge.The battery’s initial capacity is equal to the programmed full count(PFC)shown in Table2.Until LMD is up-dated,NAC counts up to but not beyond this threshold during subsequent charges.This approach allows the gas gauge to be charger-independent and compatible with any type of charge regime.st Measured Discharge(LMD)or learnedbattery capacity:LMD is the last measured discharge capacity of thebattery.On initialization(application of V CC or bat-tery replacement),LMD=PFC.During subsequentdischarges,the LMD is updated with the latestmeasured capacity in the Discharge Count Register(DCR)representing a discharge from full to belowEDV1.A qualified discharge is necessary for a ca-pacity transfer from the DCR to the LMD register.The LMD also serves as the100%reference thresh-old used by the relative display mode.2.Programmed Full Count(PFC)or initial bat-tery capacity:The initial LMD and gas gauge rate values are pro-grammed by using PROG1–PROG4.The PFC alsoprovides the100%reference for the absolute dis-play mode.The bq2012is configured for a given ap-plication by selecting a PFC value from Table2.The correct PFC may be determined by multiplyingthe rated battery capacity in mAh by the sense re-sistor value:Battery capacity (mAh)*sense resistor (Ω) =PFC (mVh)Selecting a PFC slightly less than the rated capac-ity for absolute mode provides capacity above thefull reference for much of the battery’s life.5bq2012Figure 2. Operational OverviewExample:Selecting a PFC Value Given:Sense resistor =0.1ΩNumber of cells =6Capacity =2200mAh,NiCd battery Current range =50mA to 2A Absolute display mode Serial port only Self-discharge=Voltage drop resistor =5mV to 200mV Therefore:2200mAh *0.1Ω=220mVhSelect:PFC =33792counts or 211mVh PROG 1=float PROG 2=float PROG 3=float PROG 4=low PROG 5=float PROG 6=floatThe initial full battery capacity is 211mVh (2110mAh)until the bq2012“learns”a new capac-ity with a qualified discharge from full to EDV1.6bq2012PROG x ProgrammedFull Count (PFC)PROG 4= L PROG 4= ZUnits 12PROG 3= HPROG 3= Z PROG 3= L PROG 3= H PROG 3= ZPROG 3= L ---Scale =1/80Scale =1/160Scale =1/320Scale =1/640Scale =1/1280Scale =1/2560mVh/count H H 4915261430715476.838.419.2mVh H Z 4505656328214170.435.217.6mVh H L 4096051225612864.032.016.0mVh Z H 3686446123011557.628.814.4mVh Z Z 3379242221110653.026.413.2mVh Z L 3072038419296.048.024.012.0mVh L H 2764834617386.443.221.610.8mVh L Z 2560032016080.040.020.010.0mVh LL2252828214170.435.217.68.8mVh V SR is equivalent to 2counts/sec.(nom.)904522.511.255.562.8mVTable 2. bq2012 Programmed Full Count mVh SelectionsNote:PROG 5and PROG 6states are independent.Table 1. bq2012 Programming3.Nominal Available Charge(NAC):NAC counts up during charge to a maximum value of LMD and down during discharge and self-discharge to0.NAC is reset to0on initializa-tion(PROG6=Z or low)and on reaching EDV1.NAC is set to PFC on initialization if PROG6=high.To prevent overstatement of charge during periods of overcharge,NAC stops incrementing when NAC= LMD.4.Discharge Count Register(DCR):The DCR counts up during discharge independent of NAC and could continue increasing after NAC has decremented to0.DCR stops counting when EDV1is reached.Prior to NAC=0(empty battery), both discharge and self-discharge increment the DCR.After NAC=0,only discharge increments the DCR.The DCR resets to0when NAC=LMD.The DCR does not roll over but stops counting when it reaches FFFFh.The DCR value becomes the new LMD value on the first charge after a valid discharge to V EDV1if:No valid charge initiations(charges greater than 256NAC counts;where V SRO>V SRQ)occurred dur-ing the period between NAC=LMD and EDV1de-tected.The self-discharge count is not more than4096 counts(8%to18%of PFC,specific percentage threshold determined by PFC).The temperature is≥0°C when the EDV1level is reached during discharge.The valid discharge flag(VDQ)indicates whether the present discharge is valid for LMD update. Charge CountingCharge activity is detected based on a positive voltage on the V SR input.If charge activity is detected,the bq2012increments NAC at a rate proportional to V SRO (V SR+V OS)and,if enabled,activates the LED display if the rate is equivalent to V SRO>4mV.Charge actions in-crement the NAC after compensation for charge rate and temperature.The bq2012determines charge activity sustained at a continuous rate equivalent to V SRO>V SRQ.A valid charge equates to sustained charge activity greater than 256NAC counts.Once a valid charge is detected,charge counting continues until V SRO falls below V SRQ.V SRQ is a programmable threshold as described in the Digital Magnitude Filter section.The default value for V SRQ is 375µV.Charge ControlCharge control is provided by the CHG output.This output is asserted continuously when:NAC<0.94*LMD and0.95V<V SB<2.25V and0°C<Temp<50°C andBRM=0This output is asserted atduty cycle(low for0.5sec and high for7.5sec)when above conditions are not met and:NAC<LMD and0.95V<V SB<2.25V andTemp<50°C andBRM=0This output is also asserted atduty cycle(low for0.5sec and high for7.5sec)for a period after:NAC=LMD andTemp<50°C and0.95V<V SB<2.25V andBRM=0This output is inactive when:NAC=LMD(after a2-hour top-off period)orTemp>50°C orV SB<0.95V orV SB>2.25V orBRM=1The top-off timer(2hours)is reset to allow another top-off after the battery is discharged to0.8*LMD(PROG6 =L)or0.8*PFC(PROG6=Z or H).Caution:The charge control output should be used with other forms of charge termination such as∆T/∆t and-∆V.If charge terminates due to maximum temperature,the battery temperature must fall typically10°C below50°C before the charge output becomes active again. Discharge CountingAll discharge counts where V SRO<V SRD cause the NAC register to decrement and the DCR to increment.Ex-ceeding the fast discharge threshold(FDQ)if the rate is equivalent to V SRO<-4mV activates the display,if en-abled.The display becomes inactive after V SRO rises above-4mV.V SRD is a programmable threshold as described in the Digital Magnitude Filter section.The default value for V SRD is-300µV.7bq2012Self-Discharge EstimationThe bq2012continuously decrements NAC and increments DCR for self-discharge based on time and temperature.The self-discharge count rate is programmed to be a nomi-nal *NACor *NAC per day or disabled as selected by 5.the rate for a battery whose tempera-ture is between 20°–30°C.The NAC register cannot be decremented below 0.Count CompensationsThe bq2012determines fast charge when the NAC up-dates at a rate of ≥2counts/sec.Charge and discharge are compensated for temperature and charge/discharge rate before updating the NAC and/or DCR.Self-dis-charge estimation is compensated for temperature be-fore updating the NAC or DCR.Charge CompensationTwo charge efficiency compensation factors are used for trickle charge and fast charge.Fast charge is defined as a rate of charge resulting in ≥2NAC counts/sec (≥0.15C to 0.32C depending on PFC selections;see Table 2).The compensation defaults to the fast charge factor until the actual charge rate is determined.Temperature adapts the charge rate compensation factors over three ranges between nominal,warm,and hot tem-peratures.The compensation factors are shown below .Discharge CompensationCorrections for the rate of discharge are made by adjusting an internal discharge compensation factor.The discharge factor is based on the dynamically measured V SR .The compensation factors during discharge are:Temperature compensation during discharge also takes place.At lower temperatures,the compensation factor increases by 0.05for each 10°C temperature range below 10°C.Compensation factor = 1.0 + (0.05*N)Where N =Number of 10°C steps below 10°C and -150mV <V SR <0.For example:T >10°C :Nominal compensation,N =00°C <T <10°C:N =1(i.e.,1.0becomes 1.05)-10°C <T <0°C:N =2(i.e.,1.0becomes 1.10)-20°C <T <-10°C:N =3(i.e.,1.0becomes 1.15)-20°C <T <-30°C:N =4(i.e.,1.0becomes 1.20)Self-Discharge CompensationThe self-discharge compensation is programmed for a nominal rateof *NACor *NAC per day .This is the rate for a 20–30°C temperature range (TMPGG =6x).This rate varies across 8ranges from <10°C to >70°C,doubling with each higher tem-perature step (10°C).See Table 3.Digital Magnitude FilterThe bq2012has a programmable digital filter to eliminate charge and discharge counting below a set threshold.The de-fault setting is -0.30mV for V SRD and +0.38mV for V SRQ .The proper digital filter setting can be calculated using the following equation.Table 4shows typical digital filter settings.V SRD (mV) = -45 / DMF V SRQ (mV) = -1.25*V SRD8bq2012Table 3. Self-Discharge CompensationCharge TemperatureTrickle Charge CompensationFast Charge Compensation<30°C 0.800.9530–40°C 0.750.90> 40°C0.650.80Approximate V SR Threshold Discharge CompensationFactorEfficiency V SR > -150 mV 1.00100%V SR < -150 mV1.0595%DMF DMF Hex.V SRD (mV)V SRQ (mV)754B -0.600.7510064-0.450.56150 (default)96-0.300.38175AF -0.260.32200C8-0.230.28Table 4. Typical Digital Filter SettingsError SummaryCapacity InaccurateThe LMD is susceptible to error on initialization or if no updates occur.On initialization,the LMD value in-cludes the error between the programmed full capacity and the actual capacity.This error is present until a valid discharge occurs and LMD is updated(see DCR de-scription).The other cause of LMD error is battery wear-out.As the battery ages,the measured capacity must be adjusted to account for changes in actual battery capacity.A Capacity Inaccurate counter(CPI)is maintained and incremented each time a valid charge occurs(qualified by NAC;see the CPI register description)and is reset whenever LMD is updated from the DCR.The counter does not wrap around but stops counting at255.The ca-pacity inaccurate flag(CI)is set if LMD has not been up-dated following64valid charges.Current-Sensing ErrorTable5illustrates the current-sensing error as a func-tion of V SR.A digital filter eliminates charge and dis-charge counts to the NAC register when V SRO(V SR+ V OS)is between V SRQ and V SRD. Communicating With the bq2012The bq2012includes a simple single-pin(DQ plus re-turn)serial data interface.A host processor uses the in-terface to access various bq2012registers.Battery char-acteristics may be easily monitored by adding a single contact to the battery pack.The open-drain DQ pin on the bq2012should be pulled up by the host system,or may be left floating if the serial interface is not used.The interface uses a command-based protocol,where the host processor sends a command byte to the bq2012. The command directs the bq2012to either store the next eight bits of data received to a register specified by the command byte or output the eight bits of data specified by the command byte.The communication protocol is asynchronous mand and data bytes consist of a stream of eight bits that have a maximum transmission rate of333 bits/sec.The least-significant bit of a command or data byte is transmitted first.The protocol is simple enough that it can be implemented by most host processors using either polled or interrupt processing.Data input from the bq2012may be sampled using the pulse-width capture timers available on some microcontrollers.Communication is normally initiated by the host proces-sor sending a BREAK command to the bq2012.A BREAK is detected when the DQ pin is driven to a logic-low state for a time,t B or greater.The DQ pin should then be returned to its normal ready-high logic state for a time,t BR.The bq2012is now ready to receivea command from the host processor.The return-to-one data bit frame consists of three dis-tinct sections.The first section is used to start the transmission by either the host or the bq2012taking the DQ pin to a logic-low state for a period,t STRH,B.The next section is the actual data transmission,where the data should be valid by a period,t DSU,after the negative edge used to start communication.The data should be held for a period,t DV,to allow the host or bq2012to sample the data bit.The final section is used to stop the transmission by return-ing the DQ pin to a logic-high state by at least a period, t SSU,after the negative edge used to start communication.The final logic-high state should be held until a period,t SV,to allow time to ensure that the bit transmission was stopped properly.The timings for data and break communication are given in the serial communication timing specification and illustration sections.Communication with the bq2012is always performed with the least-significant bit being transmitted first.Figure3shows an example of a communication se-quence to read the bq2012NAC register.bq2012 RegistersThe bq2012command and status registers are listed in Table6and described in the following sections.9bq2012Symbol Parameter Typical Maximum Units NotesINL Integrated non-linearityerror±2±4%Add 0.1% per °C above or below 25°Cand 1% per volt above or below 4.25V.INR Integrated non-repeatability error±1±2%Measurement repeatability givensimilar operating conditions.Table 5. Current-Sensing Error as a Function of V SRbq2012Symbol RegisterNameLoc.(hex)Read/WriteControl Field7(MSB)6543210(LSB)CMDR Commandregister00h Write W/R AD6AD5AD4AD3AD2AD1AD0FLGS1Primarystatus flagsregister01h Read CHGS BRP BRM CI VDQ CHG EDV1EDVFTMPGG Temperatureand gas gaugeregister02h Read TMP3TMP2TMP1TMP0GG3GG2GG1GG0NACH Nominalavailablecharge highbyte register03h R/W NACH7NACH6NACH5NACH4NACH3NACH2NACH1NACH0NACL Nominalavailablecharge lowbyte register17h Read NACL7NACL6NACL5NACL4NACL3NACL2NACL1NACL0BATID Batteryidentificationregister04h R/W BATID7BATID6BATID5BATID4BATID3BATID2BATID1BATID0LMD Last meas-ured dis-charge regis-ter05h R/W LMD7LMD6LMD5LMD4LMD3LMD2LMD1LMD0FLGS2Secondarystatus flagsregister06h Read CR DR2DR1DR0n/u n/u n/u OVLDPPD Program pinpull-downregister07h Read n/u n/u PPD6PPD5PPD4PPD3PPD2PPD1PPU Program pinpull-up regis-ter08h Read n/u n/u PPU6PPU5PPU4PPU3PPU2PPU1CPI Capacityinaccuratecount register09h Read CPI7CPI6CPI5CPI4CPI3CPI2CPI1CPI0DMF Digital mag-nitude filterregister0ah R/W DMF7DMF6DMF5DMF4DMF3DMF2DMF1DMF0RST Reset register39h Write RST0000000 Note:n/u = not usedTable 6. bq2012 Command and Status Registers10Command Register(CMDR)The write-only CMDR register is accessed when eight valid command bits have been received by the bq2012. The CMDR register contains two fields:I W/R bitI Command addressThe W/R bit of the command register is used to select whether the received command is for a read or a write function.The W/R values are:Where is:0The bq2012 outputs the requested registercontents specified by the address portion ofCMDR.1The following eight bits should be writtento the register specified by the address por-tion of CMDR.The lower seven-bit field of CMDR contains the address portion of the register to be accessed.Attempts to write to invalid addresses are ignored.Primary Status Flags Register(FLGS1)The read-only FLGS1register(address=01h)contains the primary bq2012flags.The charge status flag(CHGS)is asserted when a valid charge rate is detected.Charge rate is deemed valid when V SRO>V SRQ.A V SRO of less than V SRQ or discharge activity clears CHGS.The CHGS values are:Where CHGS is:0Either discharge activity detected or V SRO<V SRQ1V SRO>V SRQThe battery replaced flag(BRP)is asserted whenever the potential on the SB pin(relative to V SS),V SB,falls from above the maximum cell voltage,MCV(2.25V),or rises above0.1V.The BRP flag is also set when the bq2012is reset(see the RST register description).BRP is reset when either a valid charge action increments NAC to be equal to LMD,or a valid charge action is de-tected after the EDV1flag is asserted.BRP=1signifies that the device has been reset.The BRP values are:Where BRP is:0Battery is charged until NAC=LMD or dis-charged until the EDV1 flag is asserted1V SB dropping from above MCV,V SB risingfrom below 0.1V,or a serial port initiatedreset has occurred11bq2012FLGS1 Bits76543210 CHGS-------FLGS1 Bits76543210-BRP------CMDR Bits76543210-AD6AD5AD4AD3AD2AD1AD0 (LSB)CMDR Bits76543210 W/R-------TD201201.epsDQ Break000000101001Written by Host to bq2012CMDR = 03hReceived by Host to bq2012NAC = 65hLSB MSB LSB MSB1110Figure 3. Typical Communication With the bq2012。
ADNB-6032资料

Agilent ADNB-6031 and ADNB-6032Low Power Laser Mouse BundlesDatasheetDescriptionThe Agilent ADNB-6031 and ADNB-6032 low power laser mouse bundles are the world’s first laser-illuminated system enabled for cordlessapplication. Powered by Agilent LaserStreamtechnology, the mouse canoperate on many surfaces that proved difficult for traditional LED-based optical navigation.Its high-performance, low power architecture is capable of sensing high-speed mouseADNB-6031 and ADNB-6032 Low Power Laser Mouse Bundles include:motion while prolongingbattery life, two performance areas essential in demanding cordless applications.The ADNS-6030 sensor along with the ADNS-6120 or ADNS-6130-001 lens, ADNS-6230-001clip and ADNV-6330 VCSEL form a complete and compact laser mouse tracking system.There are no moving part,which means high reliability and less maintenance for theend user. In addition,precision optical alignment is not required, facilitating high volume assembly.This document will begin with some general information and usage guidelines on the bundle set, followed by individualdetailed information on ADNS-6030 laser mouse sensor,ADNV-6330 VCSEL, ADNS-6120 or ADNS-6130-001 lens and ADNS-6230-001 clip.Bundle Part Number Part Number DescriptionADNB-6031ADNS-6030Low Power Laser Mouse SensorADNV-6330Single-Mode Vertical-Cavity Surface Emitting Laser (VCSEL)ADNS-6120Laser Mouse Round Lens ADNS-6230-001Laser Mouse VCSEL Assembly Clip Bundle Part Number Part Number DescriptionADNB-6032ADNS-6030Low Power Laser Mouse SensorADNV-6330Single-Mode Vertical-Cavity Surface Emitting Laser (VCSEL)ADNS-6130-001Laser Mouse Trim LensADNS-6230-001Laser Mouse VCSEL Assembly ClipOverview of Laser Mouse Sensor AssemblyFigure 1. 2D Assembly drawing of ADNB-6032 (top and cross-sectional view)Shown with ADNS-6130-001 Laser Mouse Lens, ADNS-6230-001 VCSEL AssemblyClip and ADNV-6330 VCSEL. The components interlock as they are mounted onto defined features on the base plate.The ADNS-6030 laser mouse sensor is designed for mounting on a through hole PCB, looking down. There is an aperture stop and features on the package that align to the lens.The ADNV-6330 VCSEL is recommended for illumination provides a laser diode with a single longitudinal and a single transverse mode. It is particularly suited as lower power consumption and highly coherent replacement of LEDs. It also provides wider operation range while still remaining within single-mode, reliable operating conditions.The ADNS-6120 or ADNS-6130-001 Laser Mouse Lens isdesigned for use with ADNS-6030 sensor and theillumination subsystemprovided by the assembly clipand the VCSEL. Together withthe VCSEL, the lens providesthe directed illumination andoptical imaging necessary forproper operation of the LaserMouse Sensor. ADNS-6120 andADNS-6130-001 are precisionmolded optical componentsand should be handled withcare to avoid scratching of theoptical surfaces. ADNS-6120also has a large round flangeto provide a long creepagepath for any ESD events thatoccur at the opening of thebase plate.The ADNS-6230-001 VCSELAssembly Clip is designed toprovide mechanical coupling ofthe ADNV-6330 VCSEL to theADNS-6120 or ADNS-6130-001lens. This coupling is essentialto achieve the properillumination alignment requiredfor the sensor to operate on awide variety of surfaces.Agilent Technologies providesan IGES file drawingdescribing the base platemolding features for lens andPCB alignment.Figure 2. Exploded view drawing *or ADNS-6120 for round lens2D Assembly Drawing of ADNB-6031/32, PCBs and Base PlateAssembly Recommendation1.Insert the sensor and allother electrical componentsinto the application PCB(main PCB board andVCSEL PCB board).2.Wave-solder the entireassembly in a no-washsolder process utilizing asolder fixture. The solderfixture is needed to protectthe sensor during the solder process. It also sets thecorrect sensor-to -PCBdistance, as the leadshoulders do not normallyrest on the PCB surface.The fixture should bedesigned to expose thesensor leads to solder while shielding the opticalaperture from direct soldercontact.3.Place the lens onto the baseplate.4.Remove the protectivekapton tape from the optical aperture of the sensor. Care must be taken to keepcontaminants from enteringthe aperture.5.Insert the PCB assemblyover the lens onto the baseplate. The sensor aperturering should self-align to thelens. The optical positionreference for the PCB is setby the base plate and lens.Note that the PCB motiondue to button presses mustbe minimized to maintainoptical alignment.Figure 3. Recommended PCB mechanical cutouts and spacing6.Remove the protective capfrom the VCSEL.7.Insert the VCSEL assemblyinto the lens.8.Slide the clip in place untilit latches. This locks theVCSEL and lens together.9.Tune the laser output powerfrom the VCSEL to meet theEye Safe Class I Standardas detailed in the LASERPower AdjustmentProcedure.10. Install the mouse top case.There must be a feature inthe top case (or other area)to press down onto thesensor to ensure the sensorand lens are interlocked tothe correct vertical height.Design considerations for improving ESD PerformanceFor improved electrostatic discharge performance, typical creepage and clearance distance are shown in thetable below. Assumption: base plate construction as per the Agilent supplied IGES file and ADNS-6130-001 trim lens (or ADNS-6120 round lens).Typical Distance Millimeters Creepage 12.0Clearance2.1Note that the lens material is polycarbonate and therefore,cyanoacrylate based adhesives or other adhesives that may damage the lens should NOT be used.Figure 4. Sectional view of PCB assembly highlighting optical mouse componentsFigure 5a. Schematic Diagram for 3-Button Scroll Wheel Corded MouseGND D-Notes1.The supply and ground paths should be laid out using a star methodology.2.Level shifting is required to interface a 5V micro-controller to the ADNS-6030. If a 3V micro-controller is used, the 74VHC125 component shown may be omitted.F i g u r e 5b . S c h e m a t i c D i a g r a m f o r 3-B u t t o n S c r o l l W h e e l C o r d l e s s M o u s eLASER Drive ModeThe laser is driven in pulsed mode during normal operation.A calibration mode is provided which drives the laser in continuous (CW) operation. Eye SafetyThe ADNS-6030 and the associated components in the schematic of Figure 5 are intended to comply with Class 1 Eye Safety Requirements of IEC 60825-1. Agilent Technologies suggests that manufacturers perform testing to verify eye safety on each mouse. It is also recommended to review possible single fault mechanisms beyond those described below in the section “Single Fault Detection”. Under normal conditions, the ADNS-6030 generates the drive current for the laser diode (ADNV-6330).In order to stay below the Class 1 power requirements, LASER_CTRL0 (register 0x1a), LASER_CTRL1 (register 0x1f), LSRPWR_CFG0 (register 0x1c) and LSRPWR_CFG1 (register0x1d) must be programmed to appropriate values. The system comprised of the ADNS-6030 and ADNV-6330, is designed to maintain the output beam power within Class 1 requirements over components manufacturing tolerances and the recommended temperature range when adjusted per the procedure below and implemented as shown in the recommended application circuit of Figure 5. For more information, please refer to Agilent ADNB-6031 andADNB-6032 Laser Mouse Sensor Eye Safety Application Note AN SER Power Adjustment Procedure1.The ambient temperatureshould be 25C +/- 5C.2.Set V DD to its permanentvalue.3.Set the Range bit (bit 7 ofregister 0x1a) to 0.4.Set the Range_C complementbit (bit 7 of register 0x1f) to1.5.Set the Match_bit (bit 5 ofregister 0x1a) to the correctvalue for the bin designationof the laser being used.6.Set the Match_C_bit (bit 5of register 0x1f) to thecomplement of theMatch_bit.7.Enable the Calibration modeby writing to bits [3,2,1] ofregister 0x1A so the laserwill be driven with 100%duty cycle.8.Write the Calibration modecomplement bits to register0x1f.9.Set the laser current to theminimum value by writing0x00 to register 0x1c, andthe complementary value0xFF to register 0x1d.10. Program registers 0x1c and0x1d with increasing valuesto achieve an output poweras close to 506uW aspossible without exceedingit. If this power is obtained,the calibration is complete,skip to step 14.11. If it was not possible toachieve the power target, setthe laser current to theminimum value by writing0x00 to register 0x1c, andthe complementary value0xff to register 0x1d.12. Set the Range and Range_Cbits in registers 0x1a and0x1f, respectively, to chooseto the higher laser currentrange.13. Program registers 0x1c and0x1d with increasing valuesto achieve an output poweras close to 506uW aspossible without exceedingit.14. Save the value of registers0x1a, 0x1c, 0x1d, and 0x1fin non-volatile memory inthe mouse. These registersmust be restored to thesevalues every time theADNS-6030 is reset.15. Reset the mouse, reloadthe register values fromnon-volatile memory, enableCalibration mode, andmeasure the laser power toverify that the calibration iscorrect.Good engineering practicessuch as regular power metercalibration, random qualityassurance retest of calibratedmice, etc. should be used toguarantee performance,reliability and safety for theproduct design.LASER Output PowerThe laser beam output power as measured at the navigation surface plane is specifiedbelow. The following conditions apply:1.The system is adjusted according to the above procedure.2.The system is operated within the recommendedoperating temperature range.3.The V DD value is no greater than 300mV above its value at the time of adjustment.4.No allowance for optical power meter accuracy is assumed.Figure 6. Single Fault Detection and Eye-safety Feature Block DiagramV Disabling the LASERLASER_NEN is connected to the gate of a P-channelMOSFET transistor which when ON connects V DD to theLASER. In normal operation,LASER_NEN is low. In the case of a fault condition(ground or V DD at XY_LASER),LASER_NEN goes high to turn the transistor off and disconnect V DD from the LASER.Single Fault DetectionADNS-6030 is able to detect a short circuit or fault condition at the XY_LASER pin, which could lead to excessive laser power output. A path toground on this pin will trigger the fault detection circuit,which will turn off the laser drive current source and set the LASER_NEN output high.When used in combination with external components as shown in the block diagram below, the system will prevent excess laser power for a resistive path to ground at XY_LASER by shutting off the laser. In addition to the ground path fault detection described above, the fault detection circuit iscontinuously checked forproper operation by internally generating a path to ground with the laser turned off via LASER_NEN. If the XY_LASER pin is shorted to V DD , this test will fail and will be reported as a fault.Agilent ADNS-6030Laser Mouse SensorTheory of OperationThe ADNS-6030 is based on LaserStream Technology,which measures changes in position by optically acquiring sequential surface images (frames) and mathematically determining the direction and magnitude of movement.The ADNS-6030 contains an Image Acquisition System (IAS), a Digital SignalProcessor (DSP), and a four wire serial port. The IAS acquires microscopic surface images via the lens and illumination system. These images are processed by the DSP to determine the directionFeatures•Low power architecture•New LaserStream technology •Self-adjusting power-saving modes for longest battery life •High speed motion detection up to 20 ips and 8G •Enhanced SmartSpeed self-adjusting frame rate for optimum performance •Motion detect pin output •Internal oscillator – no clock input needed •Selectable 400 and 800 cpi resolution •Wide operating voltage: 2.7V-3.6V nominal •Four wire serial port •Minimal number of passive components •Laser fault detect circuitry on-chip for Eye Safety CompliancePinout of ADNS-6030 Optical Mouse SensorFigure 7. Package outline drawing (top view)and distance of motion. The DSP calculates the ∆x and ∆y relative displacement values.An external microcontroller reads the ∆x and ∆yinformation from the sensor serial port. Themicrocontroller then translates the data into PS2, USB, or RF signals before sending them to the host PC or game console.Applications •Laser Mice •Optical trackballs •Integrated input devices •Battery-powered input devicesPin Name Description1NCS Chip select (active low input)2MISO Serial data output (Master In/Slave Out)3SCLK Serial clock input4MOSI Serial data input (Master Out/Slave In)5MOTION Motion Detect (active low output)6LASER_NEN LASER Enable (Active LOW)7GND Ground 8XY_LASER LASER control 9AGND Analog Ground 10AVDD Analog Supply Voltage 11AGND Analog Ground 12GND Ground 13GND Ground 14NC No connection 15GND Ground 16VDD Supply Voltage 17NC No connection 18NCNo connectionFigure 8. Package outline drawingFigure 9. Block Diagram of ADNS-6030 optical module sensorNCS SCLK MOSI MISO MOTIONVDD XY_LASERGND AVDDAGNDLASER_NENRegulatory Requirements ·Passes FCC B and worldwide analogous emission limits when assembled into a mouse with shielded cable and following Agilent recommendations.·Passes I EC-1000-4-3radiated susceptibility level when assembled into a mouse with shielded cable and following Agilent recommendations.·Passes EN61000-4-4/I EC801-4 EFT tests when assembled into a mouse with shielded cable and following Agilent recommendations.·UL flammability level UL94V-0.·Provides sufficient ESD creepage/clearance distance to avoid discharge up to 15kV when assembled into a mouse according to usage instructions above.Absolute Maximum RatingsParameter Symbol Minimum Maximum UnitsNotesStorage Temperature T S-4085O C Lead Solder Temp 260OCFor 10 seconds, 1.6mm below seating plane.Supply Voltage V DD-0.53.7V ESD 2kV All pins, human body model MIL 883 Method 3015Input Voltage V IN -0.5V DD +0.5V All Pins Latchup CurrentIout20mAAll PinsRecommended Operating ConditionsParameter Symbol Minimum Typical Maximum Units NotesOperating Temperature T A040°CPower supply voltage V DD 2.7 2.8 3.6Volts Including noise.Power supply rise time V RT1µs0 to 2.8VSupply noise(Sinusoidal)V NA100mV p-p10kHz-50MHzSerial Port ClockFrequencyf SCLK1MHz Active drive, 50% duty cycleDistance from lens reference plane to surface Z 2.18 2.40 2.62Mm Results in +/- 0.2 mm minimumDOF. See Figure 10Speed S20in/secAcceleration A8GLoad Capacitance C out100PF MOTION, MISO Voltage at XY_LASER V xy_laser0.3V DD VFigure 10. Distance from lens reference plane to surface, ZParameter Symbol Minimum Typical Maximum Units NotesMotion delay after reset t MOT-RST23ms From SW_RESET register write to valid motion,assuming motion is presentShutdown t STDWN50ms From Shutdown mode active to low currentWake from shutdown t WAKEUP23ms From Shutdown mode inactive to valid motion.Notes: A RESET must be asserted after a shutdown.Refer to section "Notes on Shutdown and ForcedRest", also note t MOT-RSTForced Rest enable t REST-EN1s From RESTEN bits set to low current Wake from ForcedRestt REST-DIS1s From RESTEN bits cleared to valid motion MISO rise time t r-MISO150300ns C L = 100pFMISO fall time t f-MISO150300ns C L = 100pFMISO delay after SCLK t DLY-MISO120ns From SCLK falling edge to MISO data valid, no loadconditionsMISO hold time t hold-MISO0.51/f SCLK us Data held until next falling SCLK edgeMOSI hold time t hold-MOSI200ns Amount of time data is valid after SCLK rising edge MOSI setup time t setup-MOSI120ns From data valid to SCLK rising edgeSPI time between write commands t SWW30µs From rising SCLK for last bit of the first data byte, torising SCLK for last bit of the second data byte.SPI time between write and read commands t SWR20µs From rising SCLK for last bit of the first data byte, torising SCLK for last bit of the second address byte.SPI time between read and subsequent commands t SRWt SRR500ns From rising SCLK for last bit of the first data byte, tofalling SCLK for the first bit of the address byte ofthe next command.SPI read address-data delay t SRAD4µs From rising SCLK for last bit of the address byte, tofalling SCLK for first bit of data being read.NCS inactive after motion burst t BEXIT500ns Minimum NCS inactive time after motion burstbefore next SPI usageNCS to SCLK active t NCS-SCLK120ns From NCS falling edge to first SCLK rising edgeSCLK to NCS inactive (for read operation)t SCLK-NCS120ns From last SCLK rising edge to NCS rising edge, forvalid MISO data transferSCLK to NCS inactive (for write operation)t SCLK-NCS20µs From last SCLK rising edge to NCS rising edge, forvalid MOSI data transferNCS to MISO high-Z t NCS-MISO500ns From NCS rising edge to MISO high-Z state MOTION rise time t r-MOTION150300ns C L = 100pFMOTION fall time t f-MOTION150300ns C L = 100pFTransient Supply Current I DDT30mA Max supply current during a V DD ramp from 0 to 2.8VAC Electrical SpecificationsElectrical Characteristics over recommended operating conditions. Typical values at 25 °C, V DD=2.8V.DC Electrical SpecificationsElectrical Characteristics over recommended operating conditions. Typical values at 25 °C, V DD=2.8 V. Parameter Symbol Minimum Typical Maximum Units NotesDC Supply Current in various modes I DD_RUNI DD_REST1I DD_REST2I DD_REST34.00.50.150.05101.80.400.15mA Average current, includingLASER current. No load onMISO, MOTION.Peak Supply Current40mA Peak current, including LASERcurrent. No load on MISO,MOTION.Shutdown Supply Current I DDSTDWN112µA NCS, SCLK = VDDMOSI = GNDMISO = Hi-ZInput Low Voltage V IL0.5V SCLK, MOSI, NCSInput High Voltage VIH V DD - 0.5V SCLK, MOSI, NCSInput hysteresis V I_HYS100mV SCLK, MOSI, NCSInput leakage current I leak±1±10µA Vin=VDD-0.6V, SCLK, MOSI,NCSXY_LASER Current I LAS0.8mA V xy_laser >= 0.3 VLP_CFG0 = 0xFFLP_CFG1 = 0x00LASER Current (fault mode)I LAS_FAULT300uA XY_LASER R leakage < 75kOhmsto GNDOutput Low Voltage, MISO, LASER_NEN V OL0.7V Iout=1mA, MISO, MOTIONIout= 1mA, LASER_NENOutput High Voltage, MISO, LASER_NEN V OH V DD - 0.7V Iout=-1mA, MISO, MOTIONIout= -0.5mA, LASER_NENInput Capacitance C in10pF MOSI, NCS, SCLKFigure 11. Mean Resolution vs. Z at 800cpiTypical Performance CharacteristicsFigure 12. Average Error vs. Distance at 800cpi (mm)Figure 13. Wavelength ResponsivityTypical Resolution vs. Z10020030040050060070080090010001.5 1.6 1.7 1.8 1.9 2.0 2.1 2.2 2.3 2.4 2.5 2.6 2.7 2.8 2.9 3.0 3.1 3.2 3.3Distance from Lens Reference Plane to Surface, Z (mm)R e s o l u t i o n (c o u n t s /i n c h e s )Typical Path DeviationLargest Single Perpendicular Deviation From A Straight Line At 45 DegreesPath Length = 4 inches; Speed = 6 ips ; Resolution = 800 cpi1015202530354045501.5 1.6 1.7 1.8 1.9 2.0 2.1 2.2 2.3 2.4 2.5 2.6 2.7 2.8 2.9 3.0 3.1 3.2 3.3Distance From Lens Reference Plane To Surface, Z (mm)M a x i m u m D i s t a n c e (m o u s e c ou n t )bookshelf Photo paperRelative Responsivity for ADNS-603000.10.20.30.40.50.60.70.80.914005006007008009001000Wavelength (nm)R e l a t i v e R e s p o n s i v i t yPower management modesThe ADNS-6030 has three power-saving modes. Each mode has a different motion detection period, affecting response time to mouse motion (Response Time). The sensor automatically changes to the appropriate mode, depending on the time since the last reported motion (Downshift Time). The parameters of each mode are shown in the following table.Mode ResponseTime(nominal)DownshiftTime(nominal)Rest 133ms237ms Rest 2164ms8.4s Rest 3840ms504sChip Select OperationThe serial port is activatedafter NCS goes low. If NCS israised during a transaction,the entire transaction isaborted and the serial portwill be reset. This is true forall transactions. After atransaction is aborted, thenormal address-to-data ortransaction-to-transactiondelay is still required beforebeginning the next transaction.To improve communicationreliability, all serialtransactions should be framedby NCS. In other words, theport should not remainenabled during periods of non-use because ESD and EFT/Bevents could be interpreted asserial communication and putthe chip into an unknownstate. In addition, NCS mustbe raised after each burst-mode transaction is completeto terminate burst-mode. Theport is not available forfurther use until burst-mode isterminated.Synchronous Serial PortThe synchronous serial port isused to set and readparameters in the ADNS-6030,and to read out the motioninformation.The port is a four-wire port.The host micro-controlleralways initiates communication;the ADNS-6030 never initiatesdata transfers. SCLK, MOSI,and NCS may be drivendirectly by a micro-controller.The port pins may be sharedwith other SPI slave devices.When the NCS pin is high, theinputs are ignored and theoutput is tri-stated.The lines that comprise theSPI port:SCLK:Clock input. It isalways generated by themaster (the micro-controller).MOSI:Input data. (MasterOut/Slave In)MISO:Output data. (MasterIn/Slave Out)NCS:Chip select input(active low). NCS needs to below to activate the serial port;otherwise, MISO will be high Z,and MOSI & SCLK will beignored. NCS can also beused to reset the serial port incase of an error.Motion Pin TimingThe motion pin is a level-sensitive output that signals the micro-controller when motion has occurred. The motion pin is lowered whenever the motion bit is set; in other words, whenever there is data in the Delta_X or Delta_Y registers. Clearing the motion bit (by reading Delta_X and Delta_Y, or writing to the Motion register) will put the motion pin high.LASER ModeFor power savings, the VCSEL will not be continuously on. ADNS-6030 will flash the VCSEL only when needed.Figure 17. Read OperationFigure 16. Write OperationRead OperationA read operation, defined as data going from the ADNS-6030 to the micro-controller, is always initiated by the micro-controller and consists of two bytes. The first byte contains the address, is sent by the micro-controller over MOSI,and has a “0” as its MSB to indicate data direction. The second byte contains the data and is driven by the ADNS-6030 over MISO. The sensor outputs MISO bits on falling edges of SCLK and samples MOSI bits on every rising edge of SCLK.Figure 15. MOSI Setup and Hold TimeSCLK MOSI MOSI Driven by MicroNCSMISOSCLKMOSIsetup , MOSISCLKSCLK MOSI MISONCSSCLK MISOt DLY-MISO Write OperationWrite operation, defined as data going from the micro-controller to the ADNS-6030,is always initiated by the micro-controller and consists of two bytes. The first byte contains the address (seven bits) and has a “1” as its MSB to indicate data direction. The second byte contains the data.The ADNS-6030 reads MOSI on rising edges of SCLK.Figure 14. MISO Delay and Hold TimeNote: The 0.5/fSCLK minimums high state of SCLK is also the minimum MISO data hold time of the ADNS-6030. Since the falling edge of SCLK is actually the start of the next read or write command, the ADNS-6030 will hold the state of data on MISO until the falling edge of SCLK.Figure 20. Timing between read and either write or subsequent read commandsFigure 19. Timing between write and read commandsFigure 18. Timing between two write commandsSCLKWrite OperationWrite OperationWrite OperationNext Read OperationNext Read or Write OperationRead OperationSCLKRequired timing between Read and Write CommandsThere are minimum timing requirements between read and write commands on the serial port.If the rising edge of the SCLK for the last data bit of the second write command occurs before the required delay (t SWW ), then the first write command may not complete correctly.If the rising edge of SCLK for the last address bit of the read command occurs before the required delay (t SWR ), the write command may not complete correctly.During a read operation SCLK should be delayed at least t SRAD after the last address data bit to ensure that the ADNS-6030 has time to prepare the requested data.The falling edge of SCLK for the first address bit of either the read or write command must be at least t SRR or t SRW after the last SCLK rising edge of the last data bit of the previous read operation.Burst Mode OperationBurst mode is a special serial port operation mode that may be used to reduce the serial transaction time for a motion read. The speed improvement is achieved by continuous data clocking to or from multiple registers without the need to specify the register address,and by not requiring thenormal delay period between data bytes.Burst mode is activated by reading the Motion_Burst register. The ADNS-6030 will respond with the contents of the Motion, Delta_X, Delta_Y,SQUAL, Shutter_Upper,Shutter_Lower andMaximum_Pixel registers in that order. The bursttransaction can be terminated anywhere in the sequence after the Delta_X value by bringing the NCS pin high. Aftersending the register address,the micro-controller must wait t SRAD and then begin reading data. All data bits can be read with no delay between bytes by driving SCLK at the normal rate. The data are latched into the output buffer after the last address bit is received. After the bursttransmission is complete, the micro-controller must raise the NCS line for at least t BEXIT to terminate burst mode. The serial port is not available for use until it is reset with NCS,even for a second burst transmission.Notes on Shutdown and Forced Rest The ADNS-6030 can be set in Rest mode through the Configuration_Bits register (0x11). This is to allow for further power savings inapplications where the sensor does not need to operate all the time.The ADNS-6030 can be set in Shutdown mode by writing 0xe7 to register 0x3b. The SPI port should not be accessed when Shutdown mode isasserted, except the power-up command (writing 0x5a to register 0x3a). (Other ICs on the same SPI bus can be accessed, as long as the sensor’s NCS pin is not asserted.) The table belowshows the state of various pins during shutdown. To deassert Shutdown mode:1.Write 0x5a to register 0x3a2.Wait for t WAKEUP3.Write 0xFE to register 0x284.Any register settings must then be reloaded.*1 NCS pin must be held to 1(high) if SPI bus is shared with other devices. It is recommended to hold to 1(high) during Power Down unless powering up theSensor. It must be held to 0(low) if the sensor is to be re-powered up fromshutdown (writing 0x5a to register 0x3a).*2 Depend on last state *3 SCLK is ignore if NCS is 1(high). It is functional if NCS is 0 (low).*4 MOSI is ignore if NCS is 1(high). If NCS is 0 (low),any command present on the MOSI pin will beignored except power-up command (writing 0x5a to register 0x3a).Note: There are long wakeup times from shutdown and forced Rest. These features should not be used for power management during normal mouse motion.Notes on Power-upThe ADNS-6030 does notperform an internal power up self-reset; thePOWER_UP_RESET register must be written every time power is applied. The appropriate sequence is as follows:1.Apply power2.Drive NCS high, then low to reset the SPI port3.Write 0x5a to register 0x3a4.Wait for t WAKEUP5.Write 0xFE to register 0x286. Read from registers 0x02,0x03 and 0x04 (or read these same 3 bytes from burst motion register 0x42)one time regardless of the motion pin state.During power-up there will be a period of time after the power supply is high butbefore any clocks are available.The table below shows the state of the various pins during power-up and reset.Figure 21. Motion Burst TimingFirst Read OperationRead Second ByteSCLKt SRADRead Third Byte。
十二烷基伯胺-安全技术说明书MSDS

第一部分化学品及企业标识化学品中文名:十二烷基伯胺化学品英文名:DodecylamineCAS No.:124-22-1分子式:C12H27N产品推荐及限制用途:有机合成中间体,用于纺织及橡胶等助剂生产。
第二部分危险性概述紧急情况概述吞咽并进入呼吸道可能致命。
造成严重皮肤灼伤和眼损伤。
可引起呼吸道刺激。
长期或反复接触可能对器官造成伤害。
对水生生物毒性极大并具有长期持续影响。
GHS危险性类别吸入危害类别 1皮肤腐蚀 / 刺激类别 1B特异性靶器官毒性一次接触类别 3特异性靶器官毒性反复接触类别 2危害水生环境——急性危险类别 1危害水生环境——长期危险类别 1标签要素:象形图:警示词:警告危险性说明:H304 吞咽并进入呼吸道可能致命H314 造成严重皮肤灼伤和眼损伤H335 可引起呼吸道刺激H373 长期或反复接触可能对器官造成伤害H410 对水生生物毒性极大并具有长期持续影响防范说明●预防措施:—— P260 不要吸入粉尘/烟/气体/烟雾/蒸气/喷雾。
—— P264 作业后彻底清洗。
—— P280 戴防护手套/穿防护服/戴防护眼罩/戴防护面具。
—— P261 避免吸入粉尘/烟/气体/烟雾/蒸气/喷雾。
—— P271 只能在室外或通风良好处使用。
—— P273 避免释放到环境中。
●事故响应:—— P301+P310 如误吞咽:立即呼叫解毒中心/医生—— P331 不得诱导呕吐。
—— P301+P330+P331 如误吞咽:漱口。
不要诱导呕吐。
—— P303+P361+P353 如皮肤(或头发)沾染:立即脱掉所有沾染的衣服。
用水清洗皮肤/淋浴。
—— P363 沾染的衣服清洗后方可重新使用。
—— P304+P340 如误吸入:将人转移到空气新鲜处,保持呼吸舒适体位。
—— P310 立即呼叫解毒中心/医生—— P305+P351+P338 如进入眼睛:用水小心冲洗几分钟。
如戴隐形眼镜并可方便地取出,取出隐形眼镜。
丹佛斯手册

2520L0232 • Rev BD • Nov 2012General, Orbital Motors Technical InformationSauer-Danfoss is Europe’s largest producer of high torque low speed hydraulic motors.We can offer more than1600 different hydraulic motor versions categorised in types, variants and sizes.The motors vary in size [rated displacement] from 8 cm3 [0,49 in 3] to 800 cm3 [48,91 in 3] per revolution. Speeds range up to approx. 2500 min -1 for the smallest type and up to approx 600 min -1 for the largest type.Maximum operating torques vary from 13 Nm [115 lbf•in] to 2700 Nm [24.000 lbf•in] peak and maximum outputs are from 2,0 kW [2,7 hp] to 70 kW [95 hp].Characteristic features:• Smooth running over the entire speed range• Constant operating torque over a wide speed range • High starting torque• High return pressure without the use of drain line [High pressure shaft seal]• High efficiency• Long life under extreme operating conditions • Robust and compact design• High radial and axial bearing capacity• For applications in both open and closed loop hydraulic systems • Suitable for a wide variety of hydraulics fluids© 2010 Sauer-Danfoss. All rights reserved.Sauer-Danfoss accepts no responsibility for possible errors in catalogs, brochures and other printed material. Sauer -Danfoss reserves the right to alter its products without prior notice. This also applies to products already ordered provided that such alterations can be made without affecting agreed specifications. All trademarks in this material are properties of their respective owners. Sauer-Danfoss, the Sauer-Danfoss logotype, the Sauer-Danfoss S-icon, PLUS+1™, What really matters is inside® and Know-How in Motion™ are trademarks of the Sauer-Danfoss Group.Front page: F300 028, F300 029, F300 023, F300 025, F300 026, F300 024, F300 021, F300 027, F300 023, Drawing: 151-1837A Wide Range of Hydraulic MotorsA Wide Range of Orbital MotorsOMV OMTOMTWOMSOMPWOMHOMROMROMPOMSSOMLOMMDH DSF300 030F300 020TMTGeneral, Orbital Motors Technical InformationA Wide Range of Hydraulic Motors (continue)Conversion Factors The programme is characterised by technical features appealing to a large numberof applications and a part of the programme is characterised by motors that can be adapted to a given application. Adaptions comprise the following variants among others:•Motors with corrosion resistant parts•Wheel motors with a recessed mounting flange•OMP, OMR motors with needle bearings•OMR motors in low leakage version•OMR motors in a super low leakage version•Short motors without bearings•Ultra short motors without bearings•Motors with integrated positive holding brake•Motors with integrated negative holding brake•Motors with tacho connection•Motors with speed sensor•Motors with integrated flushing valve•OMT/ OMV/TMT motors with reinforced parts•Motors can be supplied paintedThe Sauer-Danfoss LSHT motors are used in the following application areas:•Construction equipment•Agricultural equipment•Material handling & Lifting equipment•Forestry equipment•Lawn and turf equipment•Special purpose•Machine tools and stationary equipment•Marine equipment1 Nm = [8.851 lbf.in] 1 cm3= [0.061 in3]1 N = [0.2248 lbf] 1 l = [0.22 UK gal]1 bar = [14.50 psi] 1 l = [0.264 US gal]1 mm = [0.0394 in] °F = [1.8 °C + 32]A Wide Range of Orbital Motors3 520L0232 • Rev BD • Nov 2012General, Orbital MotorsTechnical InformationContents andTechnical LiteratureSurveySurvey of Literature with Technical Data on Sauer-Danfoss Orbital Motors Detailed data on all Sauer-Danfoss motors can be found in our motor catalogue, which is divided into 4 individual subcatalogues:•Technical data on small motors: OML and OMM•Technical data on medium sized motors: OMP, OMR, OMH and OMEW•Technical data for medium-sized motors: DH and DS•Technical data on large motors: OMS, OMT, and OMVThe most important data on all Sauer-Danfoss orbital motors is highlighted in a general survey brochure.For Technical informations on the individual variants, please contact the Sauer-Danfoss Sales Organisation.Contents and Technical Literature SurveySurvey of technical data on Sauer-Danfoss orbital motors (4)Orbital motors, general (5)Selection of motor type (7)Main types (7)Motor variants (9)Selection of motorsize (13)Build-up of the function diagram (13)Use of the function Diagram (16)Minimum speed (17)Bearing dimensioning (18)Hydraulic systems (20)Max. pressure on the shaft seal (20)Drain line (21)Braking (22)Brake motors (25)Installation, starting up and maintenance (26)Oil types (27)Temperature, viscosity and filtering (28)4520L0232 • Rev BD • Nov 20125520L0232 • Rev BD • Nov 2012General, Orbital Motors Technical Information Operating PrincipleOrbital motors convert hydraulic energy (pressure, oil flow) into mechanical energy (torque and speed).Sauer-Danfoss orbital motors are of fixed displacement high-torque design. For a given oil flow and given pressure the displacement (size of motor) determines the speed and torque. For a given displacement (size of motor) the speed is determined by the oil flow rate and the torque is determined by the pressure differential.Gearwheel setThe operating principle of the motors is based on an internal gear design, con-sisting of a fixed external gear reaching against an internal gear through which the output torque and speed are trans-mitted. There are two forms of external gear: the OML, OMM, OMP and DH have plain teeth, whereas the OMR, DS, OMH, OMEW, OMS, OMT, OMV and TMT have teeth fitted with rollers.Distributor valveThe distributor valve is driven synchronously by the internal gear through a cardan shaft ensuring that the individual chambers of the motor are filled and emptied precisely - without losses. There are two forms of distributor valve:• Spool valveOML, OMM, OMP , OMR, DH, DS and OMH motors have a spool valve: the distributor valve has been integrated with the output shaft. The cardan shaft must therefore rotate the distrib-utor valve as well as transfer mechani-cal energy from the gear-wheel set to the output shaft.• Disc valve with valve driveOMS, OMT, OMV and TMT motors have a disc valve: The distributor valve has been separated from the output shaft and it is driven by a short cardan shaft [valve drive]. A balance plate counter -bal-ances the hydraulic forces aroundthe distributor valve.B: Spool valveD: Gearwheel setA: Output shaft D: Valve drive B: Cardan shaft E: Check valve C: Gearwheel setF: Disc valveOrbital Motors, GeneralGeneral, Orbital Motors Technical Information Orbital Motors, GeneralOperating Principle (continue)Disc valve on the output shaft•OMEW motors have a disc valve-mounted on the output shaft. Thecardan shaft rotates the disc valve andtransfers mechanical energy from thegearwheel to the output shaft. Thehydraulic forces are equalised by thebalance plate.B: Disc valve D: Gearwheel set6520L0232 • Rev BD • Nov 20127520L0232 • Rev BD • Nov 2012General, Orbital Motors Technical InformationSelection of MotorSelection of Motor TypeOML, OMM, OMP, OMPW, DH - Rollerless gear rim- Spool valve integrated with output shaft - Output shaft supported in slide bearings OMPW N- Rollerless gear rim- Spool valve integrated with output shaft - Output shaft supported in needle bearings OMR, OMH, DS- Gear rim with rollers- Spool valve integrated with output shaft - Output shaft supported in slide bearings OMRW N- Gear rim with rollers- Spool valve integrated with output shaft - Output shaft supported in needle bearings OMEW- Gear rim with rollers- Disc valve on output shaft- Output shaft supported in needle bearings OMS, OMT, OMV- Gear rim with rollers- Disc valve with separate valve drive- Output shaft supported in tapered roller bearings TMT- Gear rim with rollers- Disc valve with separate valve drive- Output shaft supported in tapered roller bearingsFeatures of main typesOML, OMM, OMP, OMPW, DHCompact design. The rollerless gear rim makes these types suitable for long operating periods at moderate pressures, or short operating periods at high pressures.OMPW NCompact motor suitable for long operating periods at moderate pressures or short oper-ating periods at high pressures. The needle bearings on the output shaft make OMPW N suitable for applications with static and dynamic radial loads.OMR, OMH, DSThe rollers in the gear rim reduce local stress, spread the tooth load over their projected area and reduce the tangential reaction forces on the inner gear reducing friction to a minimum. This gives long operating life and better efficiency even at continuous high pressures. Gearwheel sets with rollers are recommended for operation with thin oil and for applications having continually reversing loads.8520L0232 • Rev BD • Nov 2012General, Orbital Motors Technical Information OMRW NBecause of the rollers in the gear rim OMRW N is suitable for continuous operation under demanding operating conditions: e.g. high pressures, thin oil, or frequent rever-sals. The needle bearings of the output shaft make OMRW N suitable for absorbing static and dynamic radial loads.OMEWOMEW motors have a disc valve mounted on the output shaft, i.e. hydraulic and mechan-ical losses are reduced to a minimum and the gearwheel set is fitted with rollers. OMEW is therefore ideal for continuous operation in demanding conditions. The output shaft runs in needle bearings capable of absorbing static and dynamic radial loads. OMEW motors are fitted with a high-pressure seal; therefore the drain line can be omitted.OMS, OMT, OMVOMS, OMT, and OMV are suitable for continuous operation under rough operating conditions: e.g. high pressures, thin oil, or frequent reversals. The tapered roller bear-ings make the motors suitable for absorbing static and dynamic radial loads. Besides the separately driven and hydraulically balanced disc valve, hydraulic and mechanical losses are reduced to a minimum. This gives the motors high efficiency - even at high pressures, and good starting characteristics.TMTThe marked for hydraulic motors has developed generally increasing expectations of the motor performance, and espacially of a higher pressure level. On some applications the present motor program no longer fulfils the marked demand. The TMT motors comply with these expectations providing the same good characteristics as the OMS, OMT and OMV motors.If the application requires very smooth running at low speeds the choice of OMS, OMT, OMV or TMT is recommended.Features of Main Types (continue)Selection of Motor TypeGeneral, Orbital Motors Technical InformationMotor Variants Motor VariantsMotors with corrosion resistant partsOMP and OMR motors are available ina version with corrosion resistant parts:OMP C and OMR C. The corrosion resis-tant parts are: output shaft (1), key (2),front cover (3), and front cover screws (4).The dust seal (5) is of nitrile rubber withstainless steel cap.OMP/OMR with dust seal capOMP and OMR motors are also availablewith a dust seal cap. These motors areparticularly suitable for sweepers, etc.where resistance to high dust concentra-tions is a requirement.Wheel motorOMP, OMR, OMS, OMT and OMV motorsare available in wheel motor versions.The recessed mounting flange makesit possible to fit a wheel hub or a winchdrum so that the radial load acts midwaybetween the two motor bearings. Thisgives the best utilisation of the bearingcapacity and is a very compact solution.Type designations of wheel motors areOMPW, OMPW N, OMRW N, OMEW,OMSW, OMTW, and OMVW.OMP/OMR with needle bearingFor applications that want to use theOMP/OMR but must also consider otheroperating conditions such as high staticradial load, frequent starts/stops andvibration on the shaft, we can offer OMP/OMR with an output shaft running inneedle bearings.Type designation: OMP N, OMR N.9 520L0232 • Rev BD • Nov 201210520L0232 • Rev BD • Nov 2012General, Orbital Motors Technical Information Super low leakage motorThe OMR motor is available in a spe-cial version that keeps spool valve and output shaft apart and supports the output shaft in needle bearings. This motor is particularly suitable for applica-tions with demands for exceptionally low leakage.Type designation: OMR NA.Short motorsOMS, OMT and OMV motors are available in short versions. It can be an advan-tage to use a short motor for gears that already have the capacity to absorb radial and axial forces.Type designations are OMSS, OMTS and OMVS.Ultrashort motorOMS, OMT, OMV and TMT are available with ultrashort installation dimensions, i.e. without bearings and output shaft. The ultrashort design allows an opti-mised integration of the motor in the counterpart. Special installation condi-tions please contact the Sauer-Danfoss Sales Organisation.Type designations: OMSU, OMTU, OMVU and TMTU.Motors with integrated positive holding brakeOMS is available in a version with integral holding brake. This is a drum brake activated mechanically (positive brake). Type designation for OMS with integral holding brake is OMS B.Motors with integrated negative holding brakeOMR motors are available with inte-grated multi-disc brake that is released by hydraulic pressure. The brake motor can be used in closed loop or open loop systems.Type designation: OMR FMotor Variants (continue)151-1188.10Motor VariantsMotor VariantsMotor Variants (continue)Motors with integrated negative holding brakeOMT and TMT with integrated multi-disc brake is available in four versions:OMT FH, OMT FL, OMT FX and TMT FL. The brake is a spring activated multi-disc type that is released by a hydraulic pres-sure. OMT FH can work with high drop pressure [e.g. piloted from a shuttle valve in open loop systems], whereas OMT FL, OMT FX and TMT FL release the brake at low pressure [e.g. piloted from the charge pump in closed loop systems]. OMT FX are particularly well-suited for applica-tions that require very short installation dimensions, - for example in road rollers and wheels.The design of the OMT F and TMT F motors allows the brake to be used as dynamic emergency brake as well.Motors with integrated flushing valve Without any change to their outerdi-mensions, OMS, OMT, OMV and TMT are available with an integrated flushing valve.The integrated flushing valve ensures continuous renewal and cooling of the oil in the closed circuit. The flushing valve is activated by the high pressure side of the motor and allows the flushing flow to pass to the drain line and the tank. Type designation: OMS V, OMT V, OMV V and TMT V .Motors with tacho connectionOMS, OMT and OMV motors are available in a version with tacho drive shaft. With a tacho connection the speed of the motor can be registered.Type designations are OMS T, OMT T andOMV T.Motor Variants (continue)Motor VariantsMotors with speed sensorOMM, OMP, OMR, OMS, OMSW, OMT and OMV are available with integrated speed sensor. The electric output signal is a standardized voltage signal that may for example be used with Sauer-Danfoss' electronic module type EHSC to control the speed of the motor. The speed is registered by an inductive sensor. Signal processing and amplification are integrated in the housing of the sensor. Type designation: OM - EM.OMT N motorOMT is available in a short version with high bearing capacity. The motor is very suitable for the propulsion of road rollers and similar equipment.Type designation: OMT NSelection of Motor SizeSelection of Motor SizeWhen a certain motor type has been selected in accordance with the requirements of the individual application, the size of the motor is determined according to the torque and speed required for the application.For this purpose use the bar chart on the first pages of the subcatalogues and the func-tion diagram for the individual motor.The function diagram for a hydraulic motor shows the relation between operatingtorque M (vertical axis) and speed n (horizontal axis) at different pressure drops ∆p and oil flows Q.The curves for constant pressure drop and constant oil flow form a network superim-posed on the coordinate system grid. The curves for constant power output N (hyperbo -las] and constant total efficiency ηt are also plotted. The latter curves have a ring form, to as on mussel shells. For this reason function diagrams are often called shell diagrams.Build-up of the Function DiagramContinuous operation/intermittent operation/peak loadThe function diagrams are divided up into a dark area A and two light areas B.The dark area A represents the continuous range of the motor. Within this range the motor is able to run continuously with optimum efficiency and operating life.The two light areas B represent the intermittent range of the motor. It is advantageous to make use of the intermittent range when the motor works with varying loads, but also to allow for braking torques when reversing direction.It is permissible to subject the motor to intermittent speed or intermittent pressure drop for max. 10% of every minute. The motor should not be subjected to intermittend speedand intermitend pressure drop at the same time.Build-up of the Function Diagram (continue)The upper limits for intermittent pressure drop and torque must not be exceeded for more than 1% of every minute (peak load). The max. peak load value is stated in the technical data for each type of motor. High pressure peaks occur, for example, whena pressure relief valve opens or a directional valve is opened or closed. Pressure relief valves and dual shock valves should be set so that pressure peaks do not exceed the max. peak values. In systems with large pressure oscillations the pressure and torque peaks should be measured with electronic equipment.To give problem-free operation the motor size should be selected using the permis-sible continuous and intermittent values while making sure that pressure peaks do not exceed the max. peak values.EfficiencyThe total efficiency ηt is the product of the volumetric efficiency (ηv) and the hydraulic-mechanical efficiency (ηhm). Thus ηt = ηv x ηhm.ExampleAn OMS 125 is to drive a shaft at a speed of 375 min-1 (rpm) with an applied torque of 310 Nm [2745 lbf•in].If the volumetric efficiency was 100% the oil quantity would be the geometric displace-ment times the number of revolutions.Theoretical supplied oil quantity:Metric US unitsQ theor =Displ. (cm3) • speed (min-1)(l/min)Q theor =Displ. [in3] • speed [rpm][US gal/min] 1000 231=125.7 • 375∼ 47 l/min =7.67 • 375 ∼12.45 US gal/min1000 231Volumetric efficiencyThe volumetric efficiency is an expres-sion for the proportion of the appliedquantity of oil [as a percentage] that isconverted to output shaft revolutions(speed). The remaining quantity of oil(leakage) is led across clearances andsealing surfaces to act as a lubricant/coolant.When the load (pressure drop) increases,leakage also increases.The quantity of oil supplied to thegearwheel set thus diminishes, and thenumber of revolution (speed) falls.Selection of Motor Sizeof the efficiencyHowever, the actual supplied oil quantity is 50 l/min [13.2 US gal]. The volumetric efficiency can be calculated as follows: MetricUS unitsηv = 47 • 100 ∼ 94%ηv = 12.45 • 100 ∼ 94%5013.2Hydraulic mechanical efficiencyThe hydraulic mechanical efficiency is an expression for the proportion of appliedpressure (as a percentage) that is con-verted to output shaft torque. The remaining pressure is loss; either mechanical loss at low speeds or hydrau-lic loss at high speeds, as can be seen on the torque graph (pressure-drop curve). Mechanical loss is greatest at motor start-up because a film of lubricant hasnot yet been built up on moving parts.After a few revolutions the film is estab -lished and friction is reduced (the curveBuild-up of the Function Diagram (continue)Selection of Motor Sizesteepens). Hydraulic loss is greatest at high speeds because of the high pressure losses in ports and oil channels when oil flow is high. Therefore the pressure drop across the gearwheel set becomes less and the motor yields less torque.OMS 125 has a minimum starting torque of 260 Nm [2300 lbf•in] at a pressure drop of 175 bar [2540 psi], as given in the OMS technical data table. When the lubricant film is established, the motor yields 310 daNm [2745 lbf•in] with the same pressure drop.On the function diagram the pressure drop curve does not intersect the torque axis, but min. starting torque at max. continuous and max. intermittent pressure drop is given in the technical data for each motor type.Example:To calculate the hydraulic-mechanical efficiency ηhm , it is necessary to first read off (mea-sure) the motor torque T mot eff for a given oil flow and given pressure drop. The diagram on page 13 shows that an OMS 125 gives a torque of 310 Nm [2745 lbf•in] for a pressure drop of 175 bar [2540 psi] and an oil flow of 50 l/min [13.20 US gal/min].The theoretical motor torque for the same pressure drop can be calculated as follows: MetricUS unit T theo =Displ. (cm 3) • pressure drop (bar) (Nm) T theo = Displ. (in 3) • pressure drop (psi)[lbf•in] 62.8 6.28MetricUS unitsT theo = 125.7 • 175 ∼ 350 Nm T theo =7.67 • 2540∼ 3102 lbf-in62.8 6.28Dividing the read-off (measured) torque by the theoretical torque gives the hydraulic-mechanical efficiency:ηhm = 310 • 100 ∼ 89% ηhm = 2745 • 100 ∼ 89%3503102Total efficiencyIt is now possible to calculate the total efficiency of OMS 125 at ∆p = 175 bar [2540 psi] and Q = 50 l/min [13.2 US gal/min]: ηt = ηv • ηhm = 94 • 89∼ 84 %100 100With an acceptable degree of accuracy the same total efficiency can be read from thefunction diagram efficiency graphs, page 13.The function diagram is for use when the right Sauer-Danfoss motor (and pumps, etc.) has to be selected for an application.For example, a motor is required with an output:Max. cont. speed: 425 min -1 (rpm) Max. cont. torque: 260 Nm [2300 lbf•in]In the subcatalogues and in the survey brochure the maximum speed and torque of the different motors can be compared. The smallest motor able to meet the requirements is to be found in the OMR or OMS series. But only OMR 125, OMS 125, and OMS 160 can meet both the required speed and torque.The function diagrams for OMR 125, OMS 125 and OMS 160 can now be used. Find the operating point concerned, i.e. the torque on the vertical axis T = 260 Nm [2300 lbf•in], speed on the horizontal axis n = 425 min -1 (rpm).The position of the operating point (T,n) in relation to the curves for constant pressure drop ∆p, constant oil flow Q, and constant total efficiency ηt , gives the following associ-ated values:Selection of Motor SizeBuild-up of the Function Diagram (continue)Use of the Function DiagramBuild-up of the Function Diagram (continue)Selection of Motor SizeWhich is now the most important factor in an overall economic and technical assessment: the initial price of the hydraulic system, its efficiency or its operating life?If the answer is the price of the motor, the choice is an OMR 125. The choice between OMR 125 and OMRW 125 N is made according to the required bearing load.If the efficiency of the motor is all-important, the choice is an OMS 125. The slightly higher initial price of OMS 125 compared with OMR 125 will often be compensated for by a better system design with associated savings in running costs and reduced heat generation. As an additional advantage OMS 125 also requires the least oil flow.When it comes to operating life being the most important factor, the choice is an OMS 160. It has the least working pressure and thereby gives the longest system operating life.When the size of motor has been decided, the capacity of the pump can be determined. If, for example, the choice had been an OMS160 , the pump would have had to be able to deliver 70 l/min[18.49 US gal/min] at 119 bar [1726 psi].If a hydraulic motor is to be installed in an existing system with a given pump, then the choice of motor is largely predetermined.At very low speeds, the motors may run less smoothly. This is why a min. speed is stated for each type of motor. In borderline cases a motor of the desired type should be tested under the required operating conditions in the system concerned before finally selecting the motor size and type.To obtain smooth running at very low speed the motor leakage must be constant. Therefore it is recommended that a motor with disc valve (OMS, OMT, OMV or TMT) be chosen, but avoid choosing motors with the smaller displacements. The best results are achieved with a constant load, a return pressure of 3-5 bar [45-70 psi] and an oil viscosity of min. 35 mm2/s [164 SUS].Minimum SpeedIn many applications the hydraulic motors must absorb both- external radial and axial forces acting directly on the output shaft of the motor (e.g. from the weight of a vehicle)- radial forces produced by torque transfer from gearwheels, chainwheels, V-belts or winch drums.For such applications hydraulic motors with built-in rolling bearings are particularly suit-able. Two different types of bearing are used in Sauer-Danfoss hydraulic motors:1) Needle bearings in OMPW N, OMRW N and OMEW.The needle bearings are capable of absorbing large radial forces. As the motors have separate axial bearings, the operating life of the needle bearings is not affected by the size of the axial load.2) Tapered roller bearings in OMS, OMSW, OMT, OMTW, OMV, OMVW and TMT The tapered roller bearings can absorb large radial and axial forces.The largest possible bearing capacity for the individual motor type is obtained by using OMPW N, OMRW N, OMEW, OMSW, OMTW, or OMVW because the recessed mounting flange makes it possible to fit for example wheel hubs and winch drums so that the radial load is applied centrally to the two bearings.Motor with needle bearingsMotor with tapered roller bearingsBearing DimensioningShaft Load and Bearing Life TimeIt is a general rule that life time and speed are inversely proportional: life is doubled when speed is halved. So life can easily be calculated for other speeds than those given in the sections on shaft load in the individual subcatalogues. The relation is expressed by the formula:L new = L ref x n refn new where L new is the life time at speed n new , and L ref and n ref are the data for the given motor type found in the subcatalogue.Relationship between Bearing Life Time and SpeedBearing DimensioningRelationship betweenShaft Load andBearing Life TimeRelationship between Permissible Shaft Load and SpeedMaximum Radial Shaft Load In certain applications the motor must run at low speeds while the bearings must absorb high loads. This is the case for example when the motors are vehicle support elements. In such cases the following relationship between speed and bearing load (with unchanged bearing life time) must be taken into account:3.3P new = nrefP ref n newP new is the shaft load at n new. P ref and n ref are data from the subcatalogue.For n ref = 200 min-1 [rpm] we have the following table forP new:P refn newmin-1 (rpm)2550100200300400500600700 P newP ref 1.88 1.52 1.23 1.000.880.810.750.720.68The calculations above are solely for bearing life time and load capacity. But there is also a limit to how much load the other parts of the motor (bearing housing, mounting flange and output shaft) can carry. For this reason the maximum shaft load is limited to avoid the risk of mechanical breakdown.The maximum shaft load is shown in the shaft load diagrams for OMPW N, OMRW N, OMEW, OMS, OMT, OMV and TMT motors.Please contact the Sauer-Danfoss sales organisation for hydraulics if motors are to be subjected to shaft loads higher than the maximum, or where there are particularly high dynamic effects (shock factor > 3).Lower shaft loads result in longer life time of the bearings. The exact relationship is shown by the following formula:L new=P ref 3.3L ref P newL new is the bearing life at a shaft load of P new, and L ref and n ref are data from the subcata-logue.Note:- The formula applies to OMPW N, OMEW and OMRW N regardless of the relation between the axial and radial loads.- With the other motors the formula only applies if there is a constant relation between the axial and radial loads.。
2024版全新nda保密协议中英文下载-

编号:__________2024版全新nda保密协议中英文下载-甲方:___________________乙方:___________________签订日期:_____年_____月_____日2024版全新nda保密协议中英文合同目录第一章:前言1.1 合同的目的和适用范围1.2 合同的签订主体1.3 合同的生效条件第二章:定义与解释2.1 保密信息2.2 保密期限2.3 保密义务主体2.4 保密信息的使用范围第三章:保密信息的范围3.1 技术信息3.2 商业信息3.3 其他应保密的信息第四章:保密义务4.1 双方对保密信息的保密义务4.2 保密义务的期限4.3 保密义务的终止第五章:保密措施5.1 物理保密措施5.2 技术保密措施5.3 管理保密措施第六章:违约责任6.1 违反保密义务的责任6.2 违反保密义务的补救措施6.3 违约方的赔偿责任第七章:争议解决7.1 争议解决的方式7.2 争议解决的地点7.3 争议解决的适用法律第八章:合同的变更和终止8.1 合同的变更8.2 合同的终止条件8.3 合同终止后的保密义务第九章:合同的转让9.1 合同的转让条件9.2 转让方的通知义务9.3 受让方的保密义务第十章:一般条款10.1 合同的有效期10.2 合同的履行地点10.3 合同的履行方式第十一章:附则11.1 合同的修订11.2 合同的附件11.3 合同的签署日期第十二章:英文版本12.1 英文合同的翻译准确性12.2 英文合同的法律效力12.3 英文合同的签署日期第十三章:其他约定13.1 双方的其他约定13.2 附件的补充说明13.3 合同的修订记录第十四章:附件14.1 NDA保密协议中英文版本14.2 附件的签署日期14.3 附件的有效期合同编号NDA2024第一章:前言1.1 合同的目的和适用范围本合同旨在明确双方在合作过程中对保密信息的保密义务,确保双方合法权益的实现。
本合同适用于双方在合作过程中产生的所有保密信息。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Agilent ADNS-2001Optical Mouse SensorData SheetCaution : It is advised that normal static precautions be taken in handling and assembly of this component to prevent damage and/or degradation which may be induced by ESD.Features•Optical navigation technology –Superior precision and smooth navigation optimized for desktop and portable mouse applications–No mechanical moving parts,provides high reliability and needs no maintenance •Complete compact 2-D motion sensor–Easy implementation and design flexibility–Replaces mechanical ball system in traditional mice •Two selectable output modes –Two channel quadrature output mode (X and Y direction) which emulates encoder phototransistors–Standard 3-button PS/2 output mode•High speed motion detector –Accurately measures up to 16 inches per second at 400 cpi •Accurate navigation over a wide range of surfaces–Enables mouse to be used with or without a mouse pad •Power conservation mode during no motion •Compatible with high volume manufacturing processes–Requires no precision optical alignment–Wave solderable •33% faster than HDNS-2000–2000 fps (@ 24 MHz)Applications•Computer mice for desktop PCs,workstations, and portable computers •Trackball•Integrated input devicesDescriptionThe ADNS-2001 is a low-cost reflective optical sensor that provides a non-mechanicaltracking engine for implementing a computer mouse.It is based on optical navigation technology which measures changes in position by optically acquiring sequential surfaceimages (frames) and mathematic-ally determining the direction and magnitude of movement. The sensor is mounted in a plasticoptical package and designed to be used with the HDNS-2100 (Lens),HDNS-2200 (LED Assembly Clip)and HLMP-ED80 (High LightOutput 639nm LED), providing a complete and compact tracking engine. This optical tracking engine has no moving parts and requires no precision optical alignment enabling high volume system assembly. The ADNS-2001offers a PS/2 or quadrature output mode for interface flexibility.Resolution is specified as 400cpi at rates of motion up to 16 inchesper second.Theory of OperationThe ADNS-2001 is based onOptical Navigation Technology. It contains an Image Acquisition System (IAS), Digital Signal Pro-cessor (DSP), and a mode select-able PS/2 or quadrature output converter. The IAS acquires im-ages of microscopic surface im-ages via the lens and illuminationFigure 1. ADNS-2001 block diagram.Figure 2. ADNS-2001 sensor package outline drawing.system provided by the HDNS-2100, HDNS-2200, and the HLMP-ED80. These images are further processed by the DSP to determine direction and distance of motion. The DSP generates a stream of delta x and delta y rela-tive displacement values which are then communicated to the output converter. This converterprovides a PS/2 3-button output,replacing existing mousemicrocontrollers, or two channel quadrature output, for direct interface to existing mouse microcontrollers.While the part can be run at 24MHz in quadrature mode, 18 MHz is recommended for PS/2 mode.NOTES:1. DIMENSIONS IN MILLIMETERS (INCHES).2. DIMENSIONAL TOLERANCE: ± 0.1 mm.3. COPLANARITY OF LEADS: 0.1 mm.4. LEAD PITCH TOLERANCE: ± 0.15 mm.5. CUMULATIVE PITCH TOLERANCE: ± 0.15 mm.6. ANGULAR TOLERANCE: ± 3.0 DEGREES.7. MAXIMUM FLASH + 0.2 mm.8. CHAMFER (25 DEGREES x 2) ON THETAPER SIDE OF THE LEAD.2.54LEAD WIDTH LEAD OFFSET LEAD PITCHPinout Pin Name PS/2 ModeQuadrature Mode 1PS2_C PS/2 Interface Clock PS/2 Interface Clock 2MODE/XA Select PS/2 Mode XA Output 3RB/XB Right Button Input XB Output 4MB/YB Middle Button Input YB Output 5LB/YA Left Button Input YA Output6XY_LED LED Control Output LED Control Output 7VDD3 3.3 VDC Input3.3 VDC Input8REFB Internal Reference Internal Reference 9OSC1Oscillator Input Oscillator Input 10GND GroundGround11OSC2Oscillator Output Oscillator Output 12GND Ground Ground 13VDD5 5 VDC Input 5 VDC Input 14VDD5 5 VDC Input 5 VDC Input 15NRESET NRESETNRESET16PS2_DPS/2 Interface DataPS/2 Interface DataFigure 3.2D Assembly Drawing of ADNS-2001Shown with HDNS-2100, HDNS-2200, and HLMP-ED80.Agilent provides an IGES filedrawing describing the base plate molding features for lens and PCB alignment. Please contact sales representative or visit our web site. Also, see HDNS-2100Technical Data Sheet for more information.Exploded View DrawingFigure 4.Typical Application using PS/2 Output 18 MHz Operation for generic PS/2compatibility531264PS/2CONNECTORHDNS-2100 LENSINTERNAL IMAGE SENSORNote:0.1 µF between pins 7 and 8 must be ceraminc, and must be trace lengths less than 5 mm.HDNS-2200 (CLIP)HLMP-ED80 (LED)ADNS-2001 (SENSOR)CUSTOMER SUPPLIED PCBHDNS-2100 (LENS)CUSTOMER SUPPLIED BASE PLATE WITH RECOMMENDED ALIGNMENT FEATURES PER IGES DRAWINGTypical USB Application using Quadrature Output18 or 24 MHz OperationNotes:1.Due to the Cypress implementation of USB suspend mode support, the NRESET pin of the ADNS-2001 must be reset using a line from the Cypress chip. The reason for this is that the Cypress chip does not configure the port input pins until after it has received a bus reset from the USB port.The unconfigured input port pins present a 16 K Ω pullup to V CC . If a cap is used on NRESET (pin 15), this pullup will result in the ADNS-2001seeing a high on the MODE pin and powering up in the PS/2 mode.2.The quadrature input pins of the Cypress part must be programmed to be Hi-Z, instead of the normal current pulldowns. This ensures that the ADNS-2001 will be able to pull the quadrature lines high over all conditions of voltage and temperature.3.0.1 µF between pins 7 and 8 must be ceramic, and must be trace lengths less than 5 mm.2N3904VAbsolute Maximum Ratings ParameterSymbol Min.Max.Units NotesStorage Temperature T S –4085˚C Operating Temperature T A40˚C Lead Solder Temperature260˚CFor 10 seconds, 1.6 mm below seating plane (see HLMP-ED80 data sheet for LED solder specifications)Supply Voltage V DD3–0.5 3.6V Supply Voltage V DD5–0.5 5.5V ESD2kV All pins, Human Body Model Input Voltage Vin –0.5V DD5 + 0.5V All I/O except OSC1 and OSC2Input VoltageVin–0.5V DD3 + 0.5VOSC1 and OSC2Recommended LED Bin Table LED Bin Category R1 Value K 69.8 ΩL 69.8 ΩM 69.8 ΩN 69.8 ΩP 69.8 – 78.7 ΩQ 69.8 – 93.1 ΩR 69.8 – 113 ΩS 69.8 – 137 ΩT69.8 – 169 ΩThe 69.8 Ω resistor is determined by the absolute maximum rating of 50 mA for the HLMP-ED80. The other resistor values for brighter bins will guarantee good signals with reduced power.For the IEC 60825-1 eye safety consideration, please contact sales representative for the technical report.Recommended Operating ConditionsParameter Symbol Min.Typ.Max.Units NotesOperating Temperature T A040˚CSupply Voltage V DD3 3.15 3.3 3.45VSupply Voltage V DD5 4.25 5.0 5.5VClock Frequency CLK23.8824.0024.12MHz Set by ceramic resonator17.418.43218.7For generic PS/2 operation Resonator Impedance X RES40ΩReset Capacitor C RESET0.0010.2210.0µFDistance from Lens Reference A 2.3 2.4 2.5mm Dimension A on HDNS-2100 Plane to Surface data sheetSpeed S016in/sec039cm/secAcceleration ACC00.2gLight Level onto IC IRR INC2500mW/m^2λ = 639 nm400DC Electrical SpecificationsElectrical Characteristics over recommended operating conditions. Typical values at 25˚C, V DD3 = 3.3, V DD5 = 5.0, Clock = 24 MHz.Parameter Symbol Min.Typ.Max.Units NotesSupply Current (Mouse Moving)I DD312.120.1mASupply Current (Mouse Moving)I DD5 6.112.4mA Pin 6 = 0.6 VSupply Current (Mouse Not Moving)I DD5 2.5mA Pin 6 = 0.6 VInput Low Voltage V IL0.8VInput High Voltage V IH2VOutput Low Voltage (LED)V OL0.30.5V I OL = 2 mAOutput Low Voltage (XA, XB, YA, YB)V OL0.5V I OL = 4 mAOutput High Current (XA, XB, YA, YB)I OH100300600µA V OH = 2.1 VOutput High Current (LED)I OHBD 1.5 3.16mA V BE = 0.6 VInput Pullup (RB, MB, LB)I PU100300600µA V IN = 0.8 VOutput Low Voltage (PS/2)V OL0.410.5V I OL = 10 mAOutput Pullup Current (PS/2)I OH3006251500µA V OH = 2.0 VReset Pullup Current I RESET51020µA V NRESET = 2.0 VI/O SpecificationsPS/2 Command Set ImplementationThe following commands are implemented. All other commands will cause an FE (resend) response from theADNS-2001. A second invalid command will cause an FC (error) response from the ADNS-2001.Valid ValuesHex Command Mnemonics for and Default Value Mnemonic for and Response Command and after Software or Command Bytes Response Bytes Description Hardware Reset RESET FF FA AA 00FF ACK ID DT Soft reset ID = AA, DT = 0RESEND FE nn...FE nn...Resend last byte (i.e., ACK)or packetSET_DFS F6 FA F6 ACK Default settingDISABLE F5 FA F5 ACK Disable stream mode(default mode) ENABLE F4 FA F4 ACK Enable stream modeSET_SAMPLING F3 FA nn FA F3 ACK nn ACK Set sampling rate(0A14283C5064 C8)10 20406080100 120reports/secondREAD_DT F2 FA 00F2 ACK DT Responds with DT = 00ECHO EE FA EE ACK Echo all further commandsuntil NO_ECHO or RESETNO_ECHO EC FA EC ACK Respond to followingcommands normallyREAD_DATA EB FA nn nn nn EB ACK nn nn nn Request a data packet See IBM PS/2 MouseTechnical Reference SET_STREAM EA FA EA ACK Respond with data packets(default mode)at the sample rateSET_PROMPT F0 FA F0 ACK Data only sent onREAD_DATASTATUS E9 FA nn nn nn E9 ACK nn nn nn Request status packet See IBM PS/2 MouseTechnical Reference SET_SCALE E7 FA E7 ACK Pseudo logLIN_SCALE E6 FA E6 ACK Linear(default mode)SET_RES E8 FA nn FA E8 ACK nn ACK Set resolution(00010203)24816 counts/mm) DISABLE_TEST E8 FA AA FA E8 ACK AA RESEND For test purposes only Default mode afterhardware resetPS/2 Mode Output Waveforms @ 24 MHzHost Sending Data Timing DiagramNotes:1.The mouse checks the DATA line. If the line is low, the system has data to transmit. The DATA line is set inactive when the start bit (always 0) isplaced on the DATA line.2.The mouse samples the DATA line for each bit while the CLK line is high. Data must be stable within 1 microsecond after the rising edge of theCLK line.3.The mouse checks for a high stop bit after the 10th CLK. If the DATA line is low, the mouse continues to clock until the DATA line becomes high,then clocks the line-control bit, and at the next opportunity sends a Resend command to the system.4.The mouse pulls the DATA line low, producing the line-control bit.5.The host can pull the CLK line low, inhibiting the mouse.Timing Parameter Description Min. Time Max. TimeT1Duration of CLK high22.5 µsec37.5 µsecT2Duration of CLK low22.5 µsec37.5 µsecT3Time from falling CLK transition, to date transition0 µsec22.5 µsecHost Receiving Timing DiagramNotes:1.The host can hold the clock signal low to inhibit the next transmission.2.The host raises the clock line to allow the next transmission.3.All times given below assume a 24 MHz resonator and are dependent upon its accuracy.Timing Parameter Description Min. Time Max. TimeT1Time from DATA transition to falling edge of CLK 3.75 µsec18.75 µsecT2Time from rising edge of CLK to DATA transition 3.75 µsec18.75 µsecT3Duration of CLK low22.5 µsec37.5 µsecT4Duration of CLK high22.5 µsec37.5 µsecT5Time to mouse inhibit after clock 11 to ensure the0 µsec37.5 µsecmouse does not start another transmissionQuadrature Output Mode Waveform @ 24 MHzThe 2 channel quadrature outputs are 5 V CMOS outputs. The Delta X count is used to generate the XA and XB quadrature signals.The Delta Y count is used to gen-erate the YA and YB quadrature signals. Delta X, Y counts are in the range of +7 to –7 counts of motion and new Delta X, Y values are generated at a rate of 2000Hz. The quadrature signals can change at a maximum rate of 16.7 kHz.Example: Quadrature Output Waveform (+X motion).AC Electrical SpecificationsElectrical Characteristics over recommended operating conditions. Typical values at 25˚C, V DD3 = 3.3, V DD5 = 5.0,A = 2.4 mm, CLK = 24.00 MHz.ParameterSymbol Min.Typ.Max.Units NotesPS/2 Baud RateFps213.316.720Kbaud PS/2 Data Transition Delay T27.51518.8µs See PS/2 timing diagrams after PS/2_C Rising Edge PS/2 Motion Report Rates 133reports/sec See PS/2 command settings Motion Scale Factor 400counts/inch Power Up Delay100msC RESET = 0.22 µF11Figure 5. Typical resolution vs. assembly height.Figure 6. Typical error vs. assembly.Typical Performance CharacteristicsTypical Performance of ADNS-2001assembled as shown in Figure 3 withHDNS-2100 Lens, HDNS-2200 LEDAssembly Clip and HLMP-ED80.Figure 7. Typical responsivity vs. wavelength.Figure 8. Typical reported path vs. true path.Note:Due to the higher flame speed, any shorterwavelength LED other than HLMP-ED80 is notrecommended.DISTANCE FROM HDNS-2100 LENS FOOTREFERENCE PLANE TO SURFACE (mm)R E S OL U T ION(CO UN T S /I NC H )10730DISTANCE FROM HDNS-2100 LENS FOOT REFERENCE PLANE TO SURFACE (mm)A V E R A G E E R R O R (% O F T R A V E L )95284167050200TRAVEL IN x DIRECTION (mm)T R A V E L I N y D I R E C T I O N (m m )60301040R EL A TIV ERE SP O NS IVIT YWAVELENGTH (nm)Ordering InformationSpecify Part Number as follows:ADNS-2001 =Sensor IC in a 16-pin optical plastic package, 20 pertube, 1000 pieces in a box.ADNB-2012 =ADNS-2001 Sensor and HDNS-2100 Round LensBundle Kit, 1000 pieces incremental (e.g., ADNB-2012:1000 pieces = 1000 pieces of ADNS-2001 and 1000pieces of HDNS-2100 in a box).ADNB-2013 =ADNS-2001 Sensor and HDNS-2100 #001 TrimmedLens Bundle Kit, 1000 pieces incremental (e.g., ADNB-2013: 1000 pieces = 1000 pieces of ADNS-2001 and1000 pieces of HDNS-2100 #001 in a box).HDNS-2100 = Round Optical Mouse LensHDNS-2101-001 = Trimmed Optical Mouse LensHDNS-2200 = LED Assembly Clip (Black)HDNS-2200-001 = LED Clip (Clear)HLMP-ED80 = LED/semiconductorsFor product information and a complete list ofdistributors, please go to our web site.For technical assistance call:Americas/Canada: +1 (800) 235-0312 or(916) 788-6763Europe: +49 (0) 6441 92460China: 10800 650 0017Hong Kong: (+65) 6756 2394India, Australia, New Zealand: (+65) 6755 1939Japan: (+81 3) 3335-8152 (Domestic/Interna-tional), or 0120-61-1280 (Domestic Only)Korea: (+65) 6755 1989Singapore, Malaysia, Vietnam, Thailand,Philippines, Indonesia: (+65) 6755 2044Taiwan: (+65) 6755 1843Data subject to change.Copyright © 2004 Agilent Technologies, Inc.May 10, 20045988-2793EN。