物理中考总复习第十章机械与人
九年级物理机械与人知识点
九年级物理机械与人知识点物理是一门研究物质和能量之间关系的科学。
机械与人是物理学中一个重要的知识点。
它主要研究有关机械运动和人体相关的力学问题。
下面将逐一介绍九年级物理机械与人的知识点。
一、运动和力运动是物体在空间中位置改变的过程。
力是使物体发生运动、改变其形状或者产生形变的原因。
可以用力的大小和方向来描述力。
力的单位是牛顿(N)。
力的作用方向有三种情况:平行、夹角以及正反方向。
如果力的作用力矩为零,力就平行。
如果力的作用力矩不为零,就会产生旋转现象。
力是矢量量,具有大小和方向。
二、机械运动机械运动是指物体在周围人目测来看发生的运动,例如物体的位置、速度、加速度等。
根据运动物体的路径,机械运动分为直线运动和曲线运动。
直线运动是物体沿直线路径运动,如一个盒子沿桌子滑动。
曲线运动是物体沿曲线路径运动,如一个球通过一个弧线向下落下。
机械运动还可以分为匀速运动和变速运动。
匀速运动是指物体在相同时间内通过相等的距离,速度保持不变。
而变速运动是指物体在相同时间内通过不同的距离,速度不断变化。
三、摩擦力摩擦力是一种阻碍物体运动的力。
摩擦力分为静摩擦力和动摩擦力两种。
静摩擦力是指当一个物体开始运动之前,受到的阻碍力。
例如,将一本书推在桌子上,需要继续施加力量,直到书开始滑动为止。
动摩擦力是指物体在运动过程中受到的阻碍力。
例如,当车辆行驶时,地面和轮胎之间产生摩擦力,这是造成车辆减速和停止的原因。
四、弹力弹力是物体发生形变后恢复到原始形状的力。
弹力可以使物体回到平衡位置,如弹簧的回弹力。
弹性势能是弹力的一种体现,也是物体在形变状态下储存的能量。
当形变取消时,弹性势能会转化为运动的动能或其他形式的能量。
五、力的合成力的合成是指将多个力合并成一个力的过程。
力的合成有两种情况:平行力的合成和垂直力的合成。
平行力的合成是指两个平行力叠加后形成一个结果力。
垂直力的合成是指两个垂直力叠加后形成一个结果力。
力的合成可以用向量图和三角法来表示和计算。
2021年河南省物理中考专题复习 第十章机械与人 课时二 机械与机械效率
机械效率 1.三种功 (1)有用功:无论是否使用机械都必须要做的功,叫做有用功,用W有表示。 公式:W有=W总-W额=ηW总 应用:用机械提升重物所做的有用功W有=Gh,其中G表示物重,h表示物体 上升的高度。
(2)额外功:不需做而又不得不做的功叫做额外功,用W额表示。 公式:W额=W总-W有=(1-η)W总 应用:Ⅰ.用动滑轮提升重物,不考虑摩擦、绳重时,所做的额外功W额=G动 h,其中G动表示动滑轮的重力,h表示物体上升的高度。 Ⅱ.用斜面提升重物,W额=fL,f为摩擦阻力,L为物体沿斜面滑行的距离。 (3)总功:⑫_有__用__功__与__额__外__功__的__总__和___或__动__力__所__做__的__功____,用W总表示。 公式:W总=W有+W额=Wη有=1W-额η
课时二 机械与机械效率
杠杆 1.定义 一根硬棒,在力的作用下能绕着固定点O转动,这根硬棒叫做杠杆。
2.杠杆的五要素
(1)支点:杠杆可以绕其转动的点。 (2)动力:使杠杆转动的力,一般用①__F__1____表示。 (3)阻力:②__阻__碍____杠杆转动的力,一般用F2表示。
(4)动力臂:支点到动力作用线的距离,一般用③__l1______表示。 (5)阻力臂:支点到阻力作用线的距离,一般用l2表示。
斜面的倾 物块 斜面 沿斜面的 斜面 机械
斜程度 重/N 高/m 拉力/N 长/m 效率
较缓 10 0.1 5.0
1 20%
较陡 10 0.3 6.7
1 45%
最陡 10 0.5 8.4
1 60%
(1)沿斜面拉动木块时,为使弹簧测力计的示数稳定,应尽量使木块做 __匀__速__直__线____运动。
解:要想用最小的力使立方体一边刚好离开地面,由图知,支点为O,动力臂 最大为OA,所施加的力应该与力臂OA垂直且向上。所以
九年级物理第十章机械与人
实验探究
L
L
1
2
o
F1
杠杆
F2
平 衡
螺
母
杠杆的平衡条件是: 动力×动力臂=阻力×阻力臂
公式表示为:F1l1=F2l2
这就是阿基米德发现的杠杆原理。
1. 把杠杆左边改用弹簧测力计竖直拉使其水平平衡 (图甲),能否得出以上结论?
2. 保持阻力F2及左右两边距离不变,用测力计斜拉杠 杆仍使其水平平衡(图乙),你有什么发现?你认为 发生这种现象的原因是什么?
这是费力杠杆
讲授新课
2.费力杠杆:
动力臂小于阻力臂。(动力大于阻力)
在生活中,你还发现了哪些工具是费力杠杆?
使用费力杠杆,虽然费了力,但却省了动力作 用点移动的距离。
3.等臂杠杆:
动力臂等于阻力臂。(动力等于阻力)
物理实验室中,我们使用的天平就是等臂杠杆。
托盘天平
物理天平
使用等臂杠杆,既不省力,也不省距离。
实验探究:定滑轮省力吗? 物重 物体移 物体移动 拉力 拉力 拉力移动 G/N 动方向 距离h/m F/N 方向 距离s/m
结论: 使用定滑轮不省力,
不省距离;但可以改变 力的方向。
定滑轮的实质
匀 速 拉 动
l1 = l2
G
F
忽
l2=l1
略 绳
F=G
重
,
摩
G
F
擦
F1 = F2 F1 = G物
F2 = G物
命题点
4. 最小拉力、力臂的作图 5. 分析数据总结杠杆的平衡条件( F1L1=F2L2 ) 6. 杠杆平衡条件(F1L1=F2L2)的应用(a.在杠杆平衡时,
两边增减砝码后杠杆是否平衡的判断以及杠杆再平衡的 条件;b.力或力臂的计算) 7. 测量多组数据的目的(避免偶然性,使结论更具有普遍 性) 实验结论:杠杆的平衡条件是:动力×动力臂=阻力×阻 力臂,即F1L1=F2L2.
沪科版八下物理第十章 机械与人知识归纳
沪科版八年级下册物理第十章 机械与人知识归纳1.杠杆:一根在力的作用下能绕着固定点转动的硬棒就叫杠杆。
2.杠杆的五要素:支点(o )、动力(F1)、阻力(F2)、动力臂、阻力臂。
其中力臂:从支点到力作用线的距离。
3.杠杆平衡的条件:动力×动力臂=阻力×阻力臂.或写作:F 1L 1=F 2L 2 或写成2112L L F F 。
4.三种杠杆:(1)省力 (F 1>F 2) 杠杆:平衡时, L 1>L 2。
特点是省力,但费距离。
(如剪铁剪刀,铡刀,起子)(2)费力 (F 1>F 2) 杠杆:平衡时, L 1<L 2。
特点是费力,但省距离。
(如钓鱼杠,理发剪刀等)(3)等臂(L 1=L 2)杠杆:平衡时, F 1=F 2。
特点是既不省力,也不费力。
(如:天平)5.定滑轮特点:不省力,但能改变动力的方向。
(实 质是个等臂杠杆)6.动滑轮特点:省一半力,但不能改变动力方向,要费距离.(实质是动力臂为阻力臂二倍的杠杆)7.滑轮组:使用滑轮组时,滑轮组用几段绳子吊着物体,提起物体所用的力就是物重的几分之一。
8.功的两个必要因素:一是作用在物体上的力;二 是物体在力的方向上通过的距离。
注意:当力的方向与移动距离垂直时,不做功,如提着东西在水平面上行走时向上的提力不做功。
9.功的计算:功(W)等于力(F)跟物体在力的方向上通过的距离(s)的乘积。
(功=力×距离)10. 功的公式:W=Fs ;单位:W →焦;F →牛顿;s →米。
(1焦=1牛·米).11.功的原理:使用机械时,人们所做的功,都等于不用机械而直接用手所做的功,也就是说使用任何机械都不省功。
12.斜面:FL=Gh 斜面长是斜面高的几倍,推力就是物重的几分之一。
(螺丝、盘山公路也是斜面)13.功率(P):单位时间(t)里完成的功(W),叫功率。
计算公式:。
单位:P →瓦特;W →焦;t →秒。
八年级物理全册 第10章 机械与人知识要点梳理 (新版)沪科版
第10章机械与人第1节科学探究:杠杆的平衡条件知识点1 认识杠杆1.杠杆:在力的作用下,能绕某一固定点转动的硬棒就是杠杆,杠杆可以是直的,也可以是弯曲的,但必须是硬棒,在使用时不能发生变形.2.杠杆的要素(1)支点:杠杆绕着转动的固定点.支点可以在杠杆上,也可以不在杠杆上,但一定和杠杆相连,通常用字母O表示.(2)动力:使杠杆转动的力.通常用字母F1表示.(3)阻力:阻碍杠杆转动的力.通常用字母F2表示.(4)动力臂:从支点到动力作用线的距离.注意,力臂是点到线的距离,不是点到点的距离.(5)阻力臂:从支点到阻力作用线的距离.知识点2 探究杠杆平衡条件1.杠杆平衡:杠杆静止不动或匀速转动.2.探究过程(1)调节杠杆两端的平衡螺母,使杠杆在水平位置平衡,目的是可以直接从杠杆上读出力臂的数值.(2)在杠杆两端分别挂不同数量的钩码,调整钩码在杠杆上的位置,使杠杆在水平位置恢复平衡,记下钩码数和对应的力臂.多做几次实验,分别记录力和力臂的值.(3)分析数据得出结论.3.杠杆平衡条件:动力×动力臂=阻力×阻力臂,字母表达式是F1×L1 =F2×L2.4.需注意的问题(1)当钩码挂到杠杆上之后,平衡螺母就不能再移动了,否则就破坏了杠杆原来的平衡.(2)探究过程中要避免杠杆两端钩码的个数相同,这样会出现力和力臂的和、差、积、商都相同的结论.知识点3 杠杆的分类与应用1.三种杠杆(1)省力杠杆:动力臂大于阻力臂的杠杆,使用时动力小于阻力,动力作用点移动的距离大于阻力作用点移动的距离.(2)费力杠杆:动力臂小于阻力臂的杠杆,使用时动力大于阻力,动力作用点移动的距离小于阻力作用点移动的距离.(3)等臂杠杆:动力臂等于阻力臂的杠杆.使用时动力等于阻力.2.三种杠杆的应用(1)省力杠杆:可以省力,如羊角锤、剪铁皮的剪子等.(2)费力杠杆:可以省距离,如钓鱼竿等.(3)等臂杠杆:天平就是等臂杠杆.知识点认识滑轮1.定滑轮(1)使用滑轮时,滑轮的轴固定不动的叫做定滑轮.(2)使用定滑轮不能省力,但可以改变动力的方向.(3)定滑轮的实质就是等臂杠杆,或者说是等臂杠杆的变形.2.动滑轮(1)滑轮的轴不再固定不动,而是随物体一起运动,这样的滑轮叫做动滑轮.(2)使用动滑轮能省一半的力,但不能改变动力的方向.(3)动滑轮的实质是动力臂是阻力臂二倍的杠杆.3.滑轮组(1)将定滑轮和动滑轮组合起来使用,这样就组成了滑轮组.(2)使用滑轮组既能省力又能改变力的方向.第3节做功了吗知识点1 做功的条件1.机械功:力和物体在力的方向上移动距离的乘积.2.做功的条件:一是作用在物体上的力,二是物体在力的方向上通过了距离.知识点2 功的计算1.功的计算公式:W=Fs.2.变形公式:F=W/s,s=W/F.第4节做功的快慢知识点1 认识功率(1)做相同的功,比较做功时间长短,做功用的时间越少,做功越快.(2)做功时间相同,比较功的多少,做的功越多,做功越快.2.功率的定义:单位时间内做功的多少.3.功率的意义:表示物体做功快慢的物理量.4.功率的计算:公式P=W/t.5.单位:国际单位为瓦(W).知识点2 功率的计算利用公式P=W/t来计算功率,计算时需要先求出功的大小,然后计算出功率,要注意时间的单位是秒.利用公式P=Fv计算,对于功率一定的机械,F越大,v就越小,如在汽车上坡时,由于功率不变,要用减速的方法来增大牵引力.第5节机械效率知识点1 正确区别各种功1.有用功:使用机械时,对人们有用的功叫做有用功.2.额外功:使用机械做功时,对人们没用,但又不得不做的功叫做额外功.3.总功:有用功和额外功的总和.知识点2 机械效率及探究1.机械效率(1)定义:有用功和总功的比值叫做机械效率.(2)公式:η=W有/W总.(3)使用机械时,额外功总是存在的,因此机械效率总小于1.2.滑轮组机械效率的测量(1)原理:η=W有/W总.(2)应测物理量:钩码重力G、钩码提升的高度h、拉力F、绳的自由端移动的距离s.(3)器材:除钩码、铁架台、滑轮、细线外,还需刻度尺、弹簧测力计.(4)必须匀速拉动弹簧测力计使钩码升高,目的是保证测力计示数大小不变.第6节合理利用机械能知识点1 功和能1.功和能的关系(1)—个物体只要具有做功的本领,不管物体是不是做功,物体都具有能量.(2)物体做功的过程就是能量转化的过程,物体做了多少功,就转化了多少能量.(3)功和能的单位相同,都是焦耳,简称焦,符号J.2.机械能(1)动能:物体由于运动而具有的能,一个物体只要运动,就一定具有动能.(2)重力势能:物体由于高度位置所具有的能,通常是以水平面为标准.(3)弹性势能:物体因弹性形变而具有的能.(4)机械能:动能和势能统称为机械能,一个物体可以同时具有动能、重力势能和弹性势能.知识点2 影响动能和势能大小的因素1.影响动能大小的因素质量越大,速度越大,物体具有的动能就越大.2.影响重力势能大小的因素物体的质量越大,被举得越高,其具有的重力势能就越大.3.影响弹性势能大小的因素物体的弹性形变越大,具有的弹性势能就越大.。
沪科版八年级全册物理第十章--机械与人(复习课)教案
教案:沪科版八年级全册物理第十章机械与人(复习课)一、教学内容本节课是沪科版八年级全册物理第十章机械与人的复习课。
教材的章节和详细内容包括:1. 第十章机械与人:本章主要介绍了简单机械、功和机械能、机械与人等知识。
2. 简单机械:包括杠杆、滑轮、斜面等,重点掌握杠杆的分类、特点和应用;滑轮的原理、分类和应用;斜面的特点和优缺点。
3. 功和机械能:了解功的定义、计算公式和单位,掌握功的计算方法;理解机械能的概念、转化和守恒;掌握动能、势能、机械能之间的相互转化。
4. 机械与人:学习使用机械的好处,了解机械在生产、生活中的应用,提高学生的实践能力。
二、教学目标1. 理解并掌握简单机械、功和机械能、机械与人等知识,能运用所学知识解决实际问题。
2. 提高学生的实验操作能力,培养学生的观察、思考、创新能力。
3. 通过对机械的学习,使学生认识到机械在生产、生活中的重要性,提高学生的实践能力。
三、教学难点与重点1. 教学难点:杠杆、滑轮、斜面的分类、特点和应用;功的计算;机械能的转化和守恒。
2. 教学重点:杠杆、滑轮、斜面的分类、特点和应用;功的计算;机械能的转化和守恒。
四、教具与学具准备1. 教具:PPT、黑板、粉笔、实验器材(杠杆、滑轮、斜面等)。
2. 学具:教材、笔记本、实验报告单。
五、教学过程1. 实践情景引入:让学生观察生活中使用的机械,思考机械的作用和原理。
3. 课堂讲解:a. 讲解简单机械的分类、特点和应用,重点讲解杠杆、滑轮、斜面的原理和特点。
b. 讲解功的定义、计算公式和单位,演示实验,让学生掌握功的计算方法。
c. 讲解机械能的概念、转化和守恒,引导学生理解动能、势能、机械能之间的相互转化。
4. 例题讲解:分析并讲解典型例题,让学生运用所学知识解决问题。
5. 随堂练习:布置随堂练习题,让学生巩固所学知识。
7. 布置作业:布置课后作业,巩固所学知识。
六、板书设计板书内容:简单机械:杠杆、滑轮、斜面功:定义、计算公式、单位机械能:概念、转化、守恒七、作业设计1. 作业题目:a. 简述杠杆、滑轮、斜面的分类、特点和应用。
八年级物理全册 第十章 机械与人总结提升 沪科版
图10-T-10
[答案] 如图所示
图10-T-10
第十章 机械与人
[解析] 动力F最小时,其力臂最长,即从支点到动力作用点的 距离为最长力臂l;在A点作力臂l的垂线,方向向上,即为最 小动力F。
第十章 机械与人
6.在“研究杠杆平衡条件”的实验中,每个钩码重为0.5 N,
弹簧测力计以如图10-T-13所示的方式拉着杠杆并使之在水平
距离相等)
图10-T-14
第十章 机械与人
(2)实验中,改变支点两侧钩码的位置和个数,一般要做三 次实验,得到三组数据并进行分析,这样做的目的是 _多__次__实__验__寻__找__杠__杆__平__衡__的__普__遍__规__律_______。 (3)如图所示,杠杆处于平衡状态。如果在支点两侧的钩码 下方分别再挂一个等重的钩码后,杠杆__不__能____(选填“能” 或“不能”)保持平衡。
竖直方向的力,也使杠杆在水平位置平衡,则这个力的方向应 __竖__直__向__上____,大小为___1_._2___N。
第十章 机械与人
图10-T-5 (3)本实验得出杠杆的平衡条件是
_F_1_l_1=__F_2_l_2(_或__动__力__×__动__力__臂__=__阻__力__×__阻__力__臂__)_______。
达式,它把运动物体的功率与速度联系起来,也就是说,在
2017年中考物理总复习课件-第10章 机械与人
N· m
做功的快慢
• 10.怎样比较做功的快慢 • (1)在相同的时间内,比较 做功 的多少 ; • (2)做相同的功,比较做功 时间 的多少。 • 11.功率与计算功率的方法 • (1)意义:表示做功 快慢 的物理量。 • (2)定义:把一段时间内 做的功 与做功所 用的这段 时间的 比叫功率。 W/t • (3)公式:P= ,导出公式:P=Fv。 • ①功率和压强的符号不要写错,功率 用大写的字母“P”,压强用小写的字母
• 【2】一个滑轮组经改进后提高了机械效率,用它 将同一物体匀速提升同样的高度,改进后与改进前 相比( D) • A.有用功减少,总功减少 • B.有用功增加,总功增加 • C.有用功不变,总功不变 • D.有用功不变,总功减少 • 分析:机械效率是指使用机械时,有用功与总功的 比值,即η=W有/W总。用它将同一物体匀速提升同 样的高度,说明有用功是相同的。现在机械效率提 高了,根据η=W有/W总可知,只能是使用机械时所 做的总功减少了。
• ②影响做功快慢的两个因素: • 由定义公式,做功快慢与 功 和 做功时间 两个因素有关。 • 由导出公式,做功的快慢由 力 和物体 运动 速度 决定。交通工具在功率P一定时 ,速度v越小,牵引力F 越大。 瓦特 • (4)国际单位: ,简称 瓦 ,符号 为 W 。常用单位: 千瓦 。 • 1 W= 1 J/s= 1 N· m/s 1 kW= 1 000 W • 注意:功率的单位符号为“W”(正体 ),与功的符号“W”(斜体)不要混淆 。
• • • • • •
【例 3】下列过程中人对桶做功的是( C ) A.提着桶站立不动 B.提着桶水平移动 C.提着桶站在匀速向上运动的电梯内 D.提着桶站在匀速水平运动的车厢内 分析:提着桶站立不动,人虽然给桶一个向上的 力,但是桶向上没有移动距离,则人对桶没有做 功;提着桶水平移动,人给桶一个向上的力,但 桶向上没有移动距离,则人对桶没做功;提着桶 站在匀速向上运动的电梯内,人给桶一个向上的 力,桶向上也移动了距离,故人对桶做了功;提着 桶站在匀速水平运动的车厢内,人给桶一个向上 的力,桶向上没有移动距离,人对桶没做功。
初中物理《机械与人》知识点总结含习题(精华版)

初中物理《机械与人》知识点总结含习题
(精华版)
机械与人
杠杆是一根硬棒,在力的作用下能够绕着固定点转动。
支点是杠杆绕着转动的点,动力是使杠杆转动的力,阻力是阻碍杠杆转动的力,动力臂是从支点到动力作用线的距离,阻力臂是从支点到阻力作用线的距离。
杠杆平衡的条件是动力×动力臂=阻力×阻力臂,也就是阿基米德发现的杠杆原理。
三种杠杆分别为省力杠杆、费力杠杆和等臂杠杆。
定滑轮特点是不能省力,但能改变动力的方向;动滑轮特点是可以省一半力,但不能改变动力方向,需要费距离。
使用滑轮组时,提起物体所用的力就是物重的几分之一。
功是指当一个力作用在物体上,并且使物体在力的方向上通过了一段距离,这个力对物体做了机械功。
力学上的功必须具备两个因素,即作用在物体上的力和物体在力的方向上通过的距离。
功等于力F乘以物体在力的方向上通过的距离s,即
W=Fs。
在国际单位制中,功的单位是焦耳,符号是J,
1J=1N·m。
使用机械时,人们所做的功,都等于不用机械而直接用手所做的功,也就是说使用任何机械都不省功。
斜面的推力是物重的几分之一,斜面长是斜面高的几倍。
功率是单位时间里完成的功,符号为P。
功率是描述做功快慢的物理量。
功率的计算公式为P=W/t,单位是瓦特,符号是W,1W=1J/s。
初二物理第十章《机械与人》复习

初二物理第十章《机械与人》复习一、杠杆:1、定义:在力的作用下绕着固定点转动的硬棒叫杠杆。
注意:①杠杆可直可曲,形状任意。
②有些情况下,可将杠杆实际转一下,来帮助确定支点。
如:鱼杆、铁锹。
2、五要素——组成杠杆示意图。
①支点:杠杆绕着转动的点。
用字母O 表示。
②动力:使杠杆转动的力。
用字母 F 1 表示。
③阻力:阻碍杠杆转动的力。
用字母 F 2 表示。
说明 动力、阻力都是杠杆的受力,所以作用点在杠杆上。
动力、阻力的方向不一定相反,但它们使杠杆的转动的方向相反④动力臂:从支点到动力作用线的距离。
用字母L 1表示。
⑤阻力臂:从支点到阻力作用线的距离。
用字母L 2表示。
画力臂方法:⑴ 找支点O ;⑵ 画力的作用线(虚线);⑶ 画力臂(虚线,过支点垂直力的作用线作垂线);⑷ 标力臂(大括号)。
3、研究杠杆的平衡条件:① 杠杆平衡是指:杠杆静止或匀速转动。
② 实验前:应调节杠杆两端的螺母,使杠杆在水平位置平衡。
这样做的目的是:可以方便的从杠杆上量出力臂。
③ 结论:杠杆的平衡条件(或杠杆原理)是:动力×动力臂=阻力×阻力臂。
写成公式F 1L 1=F 2L 2 也可写成:F 1 / F 2=L 2 / L 11)解题指导:分析解决有关杠杆平衡条件问题,必须要画出杠杆示意图;弄清受力与方向和力臂大小;然后根据具体的情况具体分析,确定如何使用平衡条件解决有关问题。
(如:杠杆转动时施加的动力如何变化,沿什么方向施力最小等。
)2)解决杠杆平衡时动力最小问题:此类问题中阻力×阻力臂为一定值,要使动力最小,必须使动力臂OF 1L 1L 2F 2最大,要使动力臂最大需要做到:①在杠杆上找一点,使这点到支点的距离最远; ②动力方向应该是过该点且和该连线垂直的方向。
4、应用:根据杠杆平衡条件: F 1×L 1=F 2×L 2名称结 构 特 征特 点应用举例省力 杠杆 动力臂大于阻力臂 L 1>L 2 省力、费距离则 F 1<F 2撬棒、铡刀、动滑轮、轮轴、羊角锤、钢丝钳、手推车、花枝剪刀 费力 杠杆 动力臂小于阻力臂 L 1<L 2费力、省距离 则F 1>F 2缝纫机踏板、起重臂、人的前臂、理发剪刀、钓鱼杆 等臂 杠杆 动力臂等于阻力臂 L 1=L 2, 不省力、不费力则 F 1=F 2天平,定滑轮注意:应根据实际来选择杠杆,当需要较大的力才能解决问题时,应选择省力杠杆,当为了使用方便,省距离时,应选费力杠杆。
第十章机械与人知识梳理+基础练习
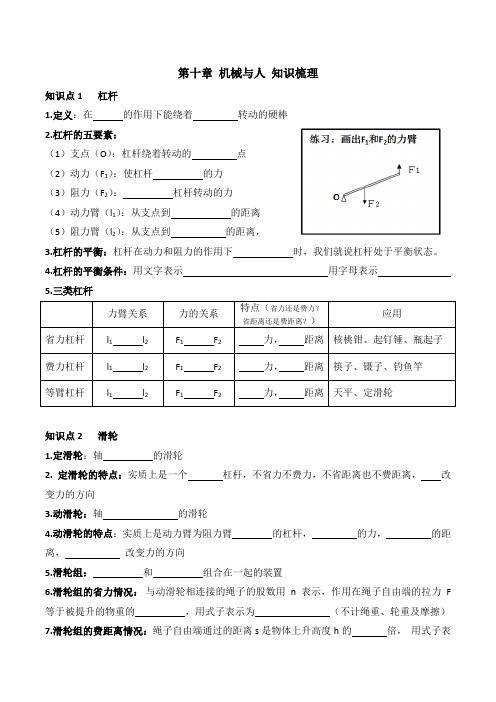
第十章机械与人知识梳理知识点1 杠杆1.定义:在的作用下能绕着转动的硬棒2.杠杆的五要素:(1)支点(O):杠杆绕着转动的点(2)动力(F1):使杠杆的力(3)阻力(F2):杠杆转动的力(4)动力臂(l1):从支点到的距离(5)阻力臂(l2):从支点到的距离,3.杠杆的平衡:杠杆在动力和阻力的作用下时,我们就说杠杆处于平衡状态。
4.杠杆的平衡条件:用文字表示用字母表示5.三类杠杆力臂关系力的关系特点(省力还是费力?省距离还是费距离?)应用省力杠杆l1l2F1F2力,距离核桃钳、起钉锤、瓶起子费力杠杆l1l2F1F2力,距离筷子、镊子、钓鱼竿等臂杠杆l1l2F1F2力,距离天平、定滑轮知识点2 滑轮1.定滑轮:轴的滑轮2. 定滑轮的特点:实质上是一个杠杆,不省力不费力,不省距离也不费距离,改变力的方向3.动滑轮:轴的滑轮4.动滑轮的特点:实质上是动力臂为阻力臂的杠杆,的力,的距离,改变力的方向5.滑轮组:和组合在一起的装置6.滑轮组的省力情况:与动滑轮相连接的绳子的股数用n表示,作用在绳子自由端的拉力F 等于被提升的物重的,用式子表示为(不计绳重、轮重及摩擦)7.滑轮组的费距离情况:绳子自由端通过的距离s是物体上升高度h的倍,用式子表示为8.奇动偶定法:与动滑轮相连接的绳子的股数是奇数,是绳子的起点在滑轮的钩上,与动滑轮相连接的绳子的股数是偶数时,绳的起点在滑轮的钩上。
知识点3 功1.功的定义:物理学中把和的乘积叫做机械功,简称功2.做功的两个必要因素:一是作用物体上的,二是物体在力的方向上移动的3.不做功的三种情况三种情况实例有无用力推汽车汽车未动有无被踢飞的足球在空中飞行力与距离垂直人提着水桶沿水平路面运动移动一段距离4.功的计算物理量意义公式一般情况做功F表示作用在物体上的拉力,s是物体在拉力方向上通过的距离W =提升物体做功G表示物体的重力,h表示物体被提升的高度W =水平拉动物体做功f表示摩擦阻力,s是物体移动的距W =5.常见功的大小:(1)将两个鸡蛋举高1m做功约为J(2)一名中学生从一楼走到三楼,克服重力做功约为J(一名中学生的质量一般是kg,重力N,一楼到三楼的间距m)(3)将一瓶500ml的矿泉水从地上拿起,并举高做功约J(水的密度是g/cm3,500ml水的质量g= kg,重力是N中学生的身高m )知识点4 功率1.功率的物理意义:表示做功的2.定义:一段时间内与做功所用的的比值3.公式:4.单位:(1)基本单位符号1W=(2)常用单位符号(3)单位换算: 1KW= W知识点5 机械效率1.有用功:对人们有用的功叫做有用功,用表示2.额外功:对人们无用但不得不做的功叫做额外功,用表示3.总功:有用功与额外功之和是总共做的功,叫做总功,用表示4.计算有用功、总功、额外功的公式5.机械效率:跟的比值6.计算机械效率的公式:7.对机效率的理解:常用百分数表示;没有单位;总小于18.提高机械效率的方法:(1)在额外功不变时,有用功,例如使用一定的机械提升重物时,增大被提升物体的重力(2)在有用功不变时,额外功,例如提升重物一定时,减小所用机械的摩擦知识点6 能量1.定义:物体能够对别的物体我们就说这个物体具有能量,简称2.单位:能量的单位是,符号3.功与能的关系:(1)物体的过程就是能的过程;(2)一个物体能够做的功越多,表示这个物体的能量越多知识点7 动能和势能1.动能(1)定义:物体由于具有的能(2)影响因素:物体的动能与物体的和有关。
中考物理总复习第十章机械与人二
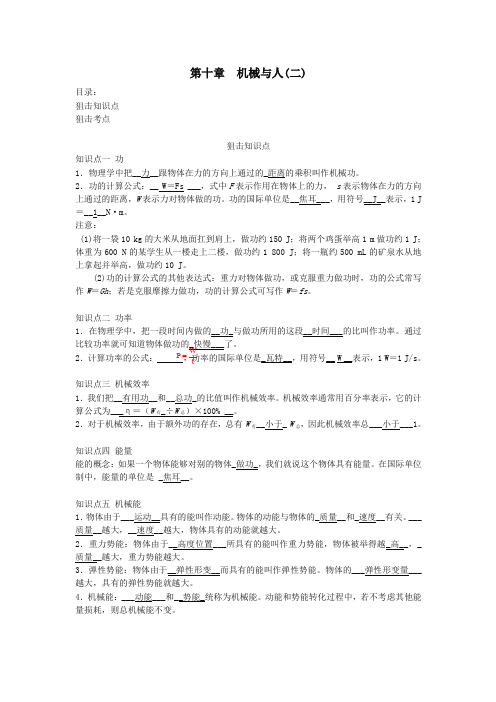
第十章 机械与人(二)目录: 狙击知识点 狙击考点狙击知识点知识点一 功1.物理学中把__力__跟物体在力的方向上通过的_距离的乘积叫作机械功。
2.功的计算公式:__ W =Fs ___,式中F 表示作用在物体上的力, s 表示物体在力的方向上通过的距离,W 表示力对物体做的功。
功的国际单位是__焦耳___,用符号__J__表示,1 J =__1__N ·m 。
注意:(1)将一袋10 kg 的大米从地面扛到肩上,做功约150 J ;将两个鸡蛋举高1 m 做功约1 J ;体重为600 N 的某学生从一楼走上二楼,做功约1 800 J ;将一瓶约500 mL 的矿泉水从地上拿起并举高,做功约10 J 。
(2)功的计算公式的其他表达式:重力对物体做功,或克服重力做功时,功的公式常写作W =Gh ;若是克服摩擦力做功,功的计算公式可写作W =fs 。
知识点二 功率1.在物理学中,把一段时间内做的__功_与做功所用的这段__时间___的比叫作功率。
通过比较功率就可知道物体做功的_快慢___了。
2.计算功率的公式: ,功率的国际单位是_瓦特__,用符号__ W __表示,1 W =1 J/s 。
知识点三 机械效率1.我们把__有用功__和__总功_的比值叫作机械效率。
机械效率通常用百分率表示,它的计算公式为___η=(W 有_÷W 总)×100% __。
2.对于机械效率,由于额外功的存在,总有W 有__小于_ W 总,因此机械效率总___小于___1。
知识点四 能量能的概念:如果一个物体能够对别的物体_做功_,我们就说这个物体具有能量。
在国际单位制中,能量的单位是 _焦耳__。
知识点五 机械能1.物体由于___运动__具有的能叫作动能。
物体的动能与物体的_质量__和_速度__有关。
___质量__越大,__速度__越大,物体具有的动能就越大。
2.重力势能:物体由于__高度位置___所具有的能叫作重力势能,物体被举得越_高__,_质量__越大,重力势能越大。
物理中考总复习第十章机械与人-附答案

第十章机械与人(一)目录:狙击知识点狙击考点狙击知识点知识点一杠杆1.在力的作用下能绕着_固定点 ___转动的硬棒叫作杠杆。
2.杠杆绕着转动的固定点叫作__支点 __,如图中_点O _;_使杠杆转动的力叫作动力,如图中__ F1 __;__阻碍杠杆转动_的力叫作阻力,如图中_ F2_;从支点到动力作用线的垂直距离叫作__动力臂 _,如图中__ l1__;从支点到阻力作用线的垂直距离叫作_阻力臂 ___,如图中__ l2__。
3.杠杆的平衡条件:_动力×动力臂=阻力×阻力臂 __,用公式可表示为__ F1l 1=F2l2_。
动力臂l1是阻力臂l2的几倍,动力F1就是阻力F2的__几分之一 _。
4.杠杆的分类省力杠杆:动力臂__大于 _阻力臂,动力__小于_阻力;这种杠杆,省了__力__,费了__距离___。
费力杠杆:动力臂__小于_阻力臂,动力____大于 __阻力;这种杠杆,费了__力____,省了___距离___。
等臂杠杆:动力臂__等于____阻力臂,动力____等于____阻力;这种杠杆,既不省力也不费力。
知识点二滑轮狙击考点考点一杠杆 (3年3考)【常考角度】(1)杠杆分类;(2)杠杆平衡条件命题角度❶杠杆分类例1如图所示的四种用具中,正常使用时属于省力杠杆的是( )【思路点拨】杠杆的分类主要包括以下三种:(1)省力杠杆,动力臂大于阻力臂。
(2)费力杠杆,动力臂小于阻力臂。
(3)等臂杠杆,动力臂等于阻力臂。
【自主解答】 B【解题技巧】动力臂大于阻力臂的杠杆为省力杠杆,动力臂小于阻力臂的杠杆为费力杠杆,动力臂等于阻力臂的杠杆为等臂杠杆。
注意:杠杆的分类命题角度❷ 杠杆平衡条件例2 在探究杠杆平衡条件的时候,小明在均匀木板中间挖孔,孔中插一金属杆,固定在铁架台上,木板可以围绕中间自由转动。
每个钩码的质量为200 g ,A 、B 、C 、D 、E 、F 为挂钩,已知AB =BO =OC =CD ,ABOCD 的连线与EDF 的连线垂直。
机械与人复习课件(中考总复习)PPT课件

15
1.下列情况中,力对物体做了功的是( D)
16
2、小明在水平面上用50N的水平推力,加速推着 一辆重120N的小车,前进了10m,小明的推力做功 _______5_0_0J ,水平面对小车的支持力做的功 ___0_____J.
17
四、功率: (P)
1、定义: 物体在单位时间内所做的功
表 示做功 快慢 的物理量
W总= F·s
3、定义:有用功与总功的比值叫机械效率
4、公式: η=
W有 W总
×100%
20
公式:η=——WW有—总用 斜面:η=——GFLh 定滑轮:η=——GFs=h ——GFh=h —GF 动滑轮:η=——FGs=h —F—G2hh=——2GF 滑轮组:η=——GFsh=—F—Gnhh=—n—GF
下图是三次实验的情景,每个钩码重0.5N,杠杆上每一格长 5cm,
部分实验数据已记录在下表中。(1)请将表格中的实验数据补充完
整。(2)第3次实验存在错误,其错误是
。 力臂L1
15 2
6
定滑轮的实质
O
F2
L1 L2 F1
定滑轮实质是等臂杠杆 特点:可以改变力的方向 但不能省力
7
动滑轮的实质
动
可 以
b、费力杠杆:若l1 < l2 ,则 F1>F2 ; 此杠杆为费力杠杆 费力杠杆特点:费力但可以省距离
c、等臂杠杆: 若l1=l2 ,则 F1=F2 ; 此杠杆为等臂杠杆
等臂杠杆特点:不省力也不省距离
3
技能
1. 杠杆AB受到两个力 F1、F2的作用。如图: 力F1、F2的力臂画法正 确的是( 丙)
过程中人不做功。物理学中规定:功等于
中考物理 第10章 机械与人课件 新人教版
滑轮组
G
F3=_n__(n是吊着动 滑轮的绳子段数)
有可能改变, 有可能不改变
s=nh
三、功和功率 1.功: (1)做功的两个必要因素。 ①作用在物体上的_力__; ②物体在力的方向上移动的_距__离__。 (2)定义:力和物体在力的方向上移动距离的_乘__积__。 (3)计算公式:_W_=_F_s_。 (4)国际单位:焦耳,符号:_J_。
3.平衡条件: (1)文字表达式:_动__力__×__动__力__臂__=_阻__力__×__阻__力__臂__。 (2)字母表达式:_F_1l_1_=_F_2l_2。
4.三种杠杆:
项目 杠杆
省力杠杆
费力杠杆
等臂杠杆
力臂 力
l1_>_l2 l1_<_l2 l1_=_ቤተ መጻሕፍቲ ባይዱ2
F1_<_F2 F1_>_F2 F1_=_F2
考点1:杠杆力臂的画法 1.画杠杆力臂的方法:
2.两步法——找杠杆“最小力”:
【失分盲点】(1)画力时,不要漏画力的方向。力臂要用大括号或箭 头表示出来,并标注符号,不能有遗漏。 (2)要按照题中的要求画力或力臂,既不要漏画,也不要画蛇添足。
【知识拓展】找最长力臂的三种情况 求最小动力,就是转化为找最长力臂问题。找最长力臂,一般分三种 情况: (1)在动力的作用点明确的情况下,就是以支点到力的作用点的连线 作为力臂,这个力臂最长,过力的作用点作力臂的垂线,正确确定力 的方向从而作最小的力。
特点 省力费_距__离__ 费力省_距__离__
不省力也不费力
应用举例 钉锤
钓鱼竿 天平
二、滑轮及其应用 定滑轮
动滑轮
滑轮组
图形特点