CFP2_baseline_design_ver5
【国家自然科学基金】_自适应控制模型_基金支持热词逐年推荐_【万方软件创新助手】_20140802

算术编码 移动机器人 磁流变弹性体 矢量控制系统 电压稳定 电力市场 混沌控制 油水两相流 永磁同步电动机 模糊自适应控制 模糊神经网络 模型辨识 柔性控制器 机器人系统 本体 最近邻聚类算法 最大功率跟踪算法 智能控制 无速度传感器 无线传感器网络 无模型自适应控制 数学模型 故障诊断 故障检测 支持向量机 报价策略 执行器故障 张力 开关磁阻电机 并网逆变器 干扰力补偿 容错控制 实用 姿态运动 多目标无功优化 变质心控制 变结构控制 反馈线性化 参数模型 参数估计 参数优化 前馈补偿 伺服系统 伪系统 不确定非线性系统 t-s模糊模型 rls算法 rbf神经网络 pll锁相环技术 pid控制 lyapunov方法 bp神经网络 黄金分割自适应控制器 鳍
永磁同步电动机 模糊自适应控制 模糊树模型 模糊 模型参考自适应控制 核学习 权函数 机动目标跟踪 无速度传感器 数学模型 控制理论 拥塞控制 抗干扰 抖振 径向基神经网络 广义预测控制 姿态机动 姿态控制 多约束 多点近似 多模型 多lyapunov函数 复杂网络 在线建模 同步 压电陶瓷 协调控制 动态面控制 减法聚类 传感器网络 交互式多模型 主成分分析 主动悬架 临界稳定 simulink pid控制 pid can总线 agent 齿隙 黄金分割反馈控制律 鲁棒跟踪控制 鲁棒控制 高阶差分格式 高速公路 高增益观测器 高压断路器 高动态 马尔可夫链 飞行控制系统 飞行器控制、导航技术 风险决策 风力发电 频移滤波器
科研热词 推荐指数 自适应控制 33 自适应 13 鲁棒性 8 滑模控制 8 神经网络 7 模糊控制 7 模型参考自适应 7 非线性系统 6 永磁同步电机 6 遗传算法 5 特征模型 5 鲁棒自适应控制 4 直接转矩控制 4 模糊神经网络 4 振动控制 4 t-s模糊模型 4 非线性控制 3 跟踪控制 3 自适应逆控制 3 稳定性 3 模诊断 3 在线辨识 3 变结构控制 3 参数辨识 3 参数估计 3 主动队列管理 3 rbf神经网络 3 高超声速飞行器 2 飞行控制 2 颤振 2 预测控制 2 非线性 2 非参数模型 2 锅炉水位 2 部分极点配置 2 逆控制 2 逆动力学 2 迟滞 2 调速系统 2 自适应阈值 2 自适应辨识 2 自适应神经模糊推理系统 2 自适应滤波 2 移动机器人 2 焦炉 2 温度 2 渠道自动控制 2 混沌 2
Autodesk Nastran 2022 用户手册说明书
MPA, MPI (design/logo), MPX (design/logo), MPX, Mudbox, Navisworks, ObjectARX, ObjectDBX, Opticore, Pixlr, Pixlr-o-matic, Productstream,
Publisher 360, RasterDWG, RealDWG, ReCap, ReCap 360, Remote, Revit LT, Revit, RiverCAD, Robot, Scaleform, Showcase, Showcase 360,
TrueConvert, DWG TrueView, DWGX, DXF, Ecotect, Ember, ESTmep, Evolver, FABmep, Face Robot, FBX, Fempro, Fire, Flame, Flare, Flint,
ForceEffect, FormIt, Freewheel, Fusion 360, Glue, Green Building Studio, Heidi, Homestyler, HumanIK, i-drop, ImageModeler, Incinerator, Inferno,
Autodesk Nastran 2022
Reference Manual
Nastran Solver Reference Manual
信息化项目软件开发费用测算指南4.0

重庆市首席信息官(CIO)协会 2源自17 年 10 月 1 日发布实施
本办法由重庆市首席信息官(CIO)协会 软件及信息化工程造价评估专委会 编制
重庆市首席信息官(CIO)协会 联系电话:023-67778659
目 次
前 言.............................................................................................................................................................. II 信息化项目软件开发费用测算指南....................................................................................................... - 1 1 范围..............................................................................................................................................- 1 2 术语和定义..................................................................................................................................- 1 3 软件开发成本构成..................................................................................................................... - 3 4 软件开发成本测算步骤............................................................................................................. - 4 附 录 A..............................................................................................................................................- 8 A.1 功能点计数项分类......................................................................................................... - 8 A.2 ILF 的识别...................................................................................................................... - 8 A.3 EIF 的识别...................................................................................................................... - 8 A.4 EI 的识别........................................................................................................................ - 8 A.5 E0 的识别........................................................................................................................ - 8 A.6 EQ 的识别........................................................................................................................ - 9 附 录 B............................................................................................................................................- 10 B.1 功能点分值计算方法................................................................................................... - 10 B.2 技术复杂度因子 TCF.................................................................................................... - 11 B.3 功能点耗时率............................................................................................................... - 11 B.4 软件因素调整因子(SWF)......................................................................................... - 11 B.5 开发因素调整因子(RDF)......................................................................................... - 13 B.6 各阶段开发工作量比例系数....................................................................................... - 13 B.7 人月费用....................................................................................................................... - 14 附 录 C............................................................................................................................................- 15 C.1 预估功能点计数表样例............................................................................................... - 15 C.2 估算功能点计数表样例............................................................................................... - 16 C.3 详细功能点清单列表................................................................................................... - 17 C.4 软件项目开发费用测算表样例................................................................................... - 18 C.5 开发软件需求书写规范样例....................................................................................... - 19 附 录 D............................................................................................................................................- 23 D.1 需求示意....................................................................................................................... - 23 D.2 测算规模....................................................................................................................... - 23 D.3 确定预算....................................................................................................................... - 24 -
数据通信原理实验指导书
实验一编码与译码一、实验学时:2学时二、实验类型:验证型三、实验仪器:安装Matlab软件的PC机一台四、实验目的:用MATLAB仿真技术实现信源编译码、过失操纵编译码,并计算误码率。
在那个实验中咱们将观看到二进制信息是如何进行编码的。
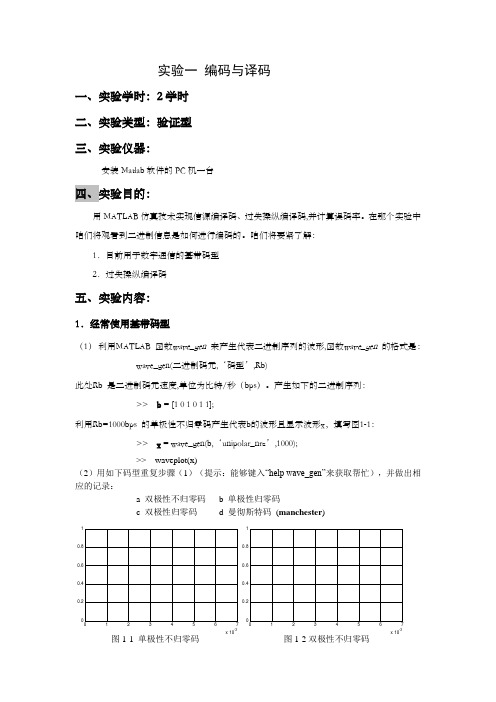
咱们将要紧了解:1.目前用于数字通信的基带码型2.过失操纵编译码五、实验内容:1.经常使用基带码型(1)利用MATLAB 函数wave_gen 来产生代表二进制序列的波形,函数wave_gen 的格式是:wave_gen(二进制码元,‘码型’,Rb)此处Rb 是二进制码元速度,单位为比特/秒(bps)。
产生如下的二进制序列:>> b = [1 0 1 0 1 1];利用Rb=1000bps 的单极性不归零码产生代表b的波形且显示波形x,填写图1-1:>> x = wave_gen(b,‘unipolar_nrz’,1000);>> waveplot(x)(2)用如下码型重复步骤(1)(提示:能够键入“help wave_gen”来获取帮忙),并做出相应的记录:a 双极性不归零码b 单极性归零码c 双极性归零码d 曼彻斯特码(manchester)x 10-3x 10-3图1-1 单极性不归零码图1-2双极性不归零码x 10-3x 10-32.过失操纵编译码(1) 利用MATLAB 函数encode 来对二进制序列进行过失操纵编码, 函数encode 的格式是:A .code = encode(msg,n,k,'linear/fmt',genmat)B .code = encode(msg,n,k,'cyclic/fmt',genpoly)C .code = encode(msg,n,k,'hamming/fmt',prim_poly)其中A .用于产生线性分组码,B .用于产生循环码,C .用于产生hamming 码,msg 为待编码二进制序列,n 为码字长度,k 为分组msg 长度,genmat 为生成矩阵,维数为k*n ,genpoly 为生成多项式,缺省情形下为cyclpoly(n,k)。
IBM Cognos Transformer V11.0 用户指南说明书
第7章-CFP偏移2
§7.2 应用实例自从1997年Berkhout教授提出CFP偏移的概念以来(Berkhout, A. J., 1997a; 1997b),CFP偏移技术已经得到了飞速的发展。
到目前为止,在叠前偏移、偏移速度建模、复杂地表静校正、层间多次波消除、观测系统优化、岩性成像及油藏动态监测和多分量地震偏移等方面都有CFP技术的应用。
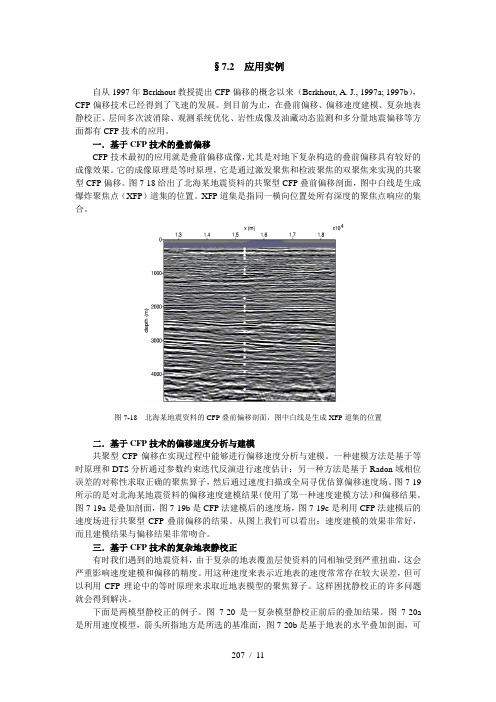
一.基于CFP技术的叠前偏移CFP技术最初的应用就是叠前偏移成像,尤其是对地下复杂构造的叠前偏移具有较好的成像效果。
它的成像原理是等时原理,它是通过激发聚焦和检波聚焦的双聚焦来实现的共聚型CFP偏移。
图7-18给出了北海某地震资料的共聚型CFP叠前偏移剖面,图中白线是生成爆炸聚焦点(XFP)道集的位置。
XFP道集是指同一横向位置处所有深度的聚焦点响应的集合。
图7-18 北海某地震资料的CFP叠前偏移剖面,图中白线是生成XFP道集的位置二.基于CFP技术的偏移速度分析与建模共聚型CFP偏移在实现过程中能够进行偏移速度分析与建模。
一种建模方法是基于等时原理和DTS分析通过参数约束迭代反演进行速度估计;另一种方法是基于Radon域相位误差的对称性求取正确的聚焦算子,然后通过速度扫描或全局寻优估算偏移速度场。
图7-19所示的是对北海某地震资料的偏移速度建模结果(使用了第一种速度建模方法)和偏移结果。
图7-19a是叠加剖面,图7-19b是CFP法建模后的速度场,图7-19c是利用CFP法建模后的速度场进行共聚型CFP叠前偏移的结果。
从图上我们可以看出:速度建模的效果非常好,而且建模结果与偏移结果非常吻合。
三.基于CFP技术的复杂地表静校正有时我们遇到的地震资料,由于复杂的地表覆盖层使资料的同相轴受到严重扭曲,这会严重影响速度建模和偏移的精度。
用这种速度来表示近地表的速度常常存在较大误差,但可以利用CFP理论中的等时原理来求取近地表模型的聚焦算子。
这样困扰静校正的许多问题就会得到解决。
基于CFP技术的偏移速度建模方法的开题报告
基于CFP技术的偏移速度建模方法的开题报告一、选题背景在目前的科学技术领域,利用激光雷达获取精准三维地形信息的技术已经得到广泛的应用。
其中,激光雷达通过扫描地面并返回离散的点云数据,从而得到地面表面的三维坐标和反射强度信息。
在进行地形特征提取和地形建模时,首先需要进行点云数据的处理和分析。
其中,偏移速度建模是一个重要的数据处理技术。
偏移速度建模是通过对点云数据进行处理以获得相邻点之间的距离和法向量信息,从而对点云数据进行重采样或滤波的过程。
这种数据处理方法在地形特征提取、地形建模和车辆自主导航等领域中得到了广泛应用。
目前,偏移速度建模技术主要分为基于固定窗口滑动和连续窗口滑动两种方法。
其中,基于CFP(Cylindrical Fitting Process)技术的偏移速度建模方法是一种较为有效的方法。
二、研究内容和目标本文主要研究基于CFP技术的偏移速度建模方法,通过分析点云数据的距离和法向量信息,在采用CFP技术时,建立基于曲率标准的点云采样模型来实现点云数据的重采样和滤波。
具体研究目标包括:1.研究基于CFP技术的偏移速度建模方法;2.分析点云数据的距离和法向量信息,并建立基于曲率标准的点云采样模型;3.实现点云数据的重采样和滤波,并对比不同方法的效果;4.提出改进方法,进一步优化偏移速度建模算法的效能。
三、研究方法和技术路线本文的研究方法主要包括理论分析和实验验证。
在理论分析方面,首先介绍点云的相关概念和数据处理方法;然后,分析基于CFP技术的偏移速度建模方法的理论基础和实现方式,并探讨其优缺点;最后,提出改进方法,优化偏移速度建模算法的效能。
在实验验证方面,我们将实现偏移速度建模算法,并将其应用于示例点云数据中。
通过对比实验验证结果,评估算法的准确性、稳定性和效率,找出不足之处,并提出改进方案。
技术路线如下:1. 点云数据处理概述2. 基于CFP技术的偏移速度建模方法3. 点云采样模型的建立4. 偏移速度建模算法的实现5. 实验验证及结果分析6. 改进方法的提出和实现7. 结论和展望四、研究意义本文研究基于CFP技术的偏移速度建模方法,旨在解决点云数据的重采样和滤波问题,提高点云数据的准确性和精度。
频繁模式挖掘中基于CFP的应用模型

频繁模式挖掘中基于CFP的应用模型
陈冬玲;曾文
【期刊名称】《沈阳大学学报》
【年(卷),期】2015(027)004
【摘要】为进一步提高频繁模式挖掘效率,对CFP构造算法做了部分改进,并提出了一些基于此结构的应用方法.实验和分析表明,改进的CFP算法在各种不同的数据挖掘应用中更加有效.
【总页数】6页(P296-300,339)
【作者】陈冬玲;曾文
【作者单位】沈阳大学信息科学与工程学院,辽宁沈阳 110044;中国科学技术信息研究所,北京 100038
【正文语种】中文
【中图分类】TP274
【相关文献】
1.基于频繁模式树的最大频繁模式挖掘算法 [J], 缪裕青
2.FIBER:基于频繁项目表的频繁模式挖掘方法 [J], 梁铁柱;秦臻;李德毅
3.一种基于频繁模式有向无环图的数据流频繁模式挖掘算法 [J], 任家东;王倩;王蒙
4.基于频繁叶模式的XML最大频繁查询模式挖掘算法 [J], 陈超祥;丁健龙;华成;金林樵
5.一种基于上三角频繁项集矩阵的频繁模式挖掘算法 [J], 王文正;王文平;许映秋;谈英姿
因版权原因,仅展示原文概要,查看原文内容请购买。
两相邻Bézier曲线的近似合并

两相邻Bézier曲线的近似合并
郭清伟
【期刊名称】《计算机辅助设计与图形学学报》
【年(卷),期】2005(017)010
【摘要】利用Bézier曲线细分后的矩阵表示,将所定义的原Bézier曲线与合并
Bézier曲线间的距离函数取最小值,给出一种把两相邻Bézier曲线合并成一条
Bézier曲线的方法.在合并过程中,分别考虑了合并Bézier曲线在左右端点处与原Bézier曲线达到高阶插值的合并以及合并Bézier曲线插值于原Bézier曲线上的某些点的合并.指出提高合并Bézier曲线的次数可减小合并误差,改善合并效果.最后给出数值例子.
【总页数】6页(P2275-2280)
【作者】郭清伟
【作者单位】复旦大学数学研究所,上海,200433;合肥工业大学理学院合肥230009
【正文语种】中文
【中图分类】TP391
【相关文献】
1.两相邻三次非均匀B样条曲线近似合并的一种方法 [J], 梁清清
2.基于拟合方法的两相邻Bézier曲线的合并逼近 [J], 陶长虹;余永莉;郭清伟
3.两相邻张量积Bézier曲面的近似合并 [J], 郭清伟;朱功勤
4.两相邻带参四次Bézier曲线的近似合并 [J], 岳丽;秦新强;胡钢;李凯
5.两相邻Bézier曲线近似合并的一种方法 [J], 郭清伟;朱功勤
因版权原因,仅展示原文概要,查看原文内容请购买。
基于LineMod的弱纹理多目标遮挡检测方法

基于LineMod的弱纹理多目标遮挡检测方法
蒋云飞;柴琦;杨杰
【期刊名称】《青岛大学学报:自然科学版》
【年(卷),期】2022(35)3
【摘要】在遮挡情况下,LineMod算法对物体的识别能力较弱,为此提出一种基于LineMod的聚类匹配识别方法CMRL。
首先利用特征点的4D附加特征与3D空间特征共同形成更深层次的7D特征块,分析各特征点的内在逻辑关联性以获取新的特征点分类方式,增加独特特征(物体边缘、角、弧等)在特征点分类过程中的影响比重;然后利用数据降维算法与K_(means)方法相结合的方式,将7D特征信息降维为新的3D特征信息,从而实现对特征块的重新分配,得到具有更多匹配信息的模板作为最终模板。
实验结果表明,该方法在多目标遮挡的复杂场景下的鲁棒性、识别率以及准确率都有较大的提高。
【总页数】6页(P45-50)
【作者】蒋云飞;柴琦;杨杰
【作者单位】青岛大学机电工程学院
【正文语种】中文
【中图分类】TP242.6
【相关文献】
1.基于Harris角点的弱纹理三维非连续图像检测
2.基于颜色与纹理特征的安防视频遮挡树叶检测
3.基于小波能量的自然纹理背景中多目标检测方法
4.基于弱纹理
检测及视差图融合的立体匹配5.基于Linemod-2D与Otsu的多目标工件快速分拣方法研究
因版权原因,仅展示原文概要,查看原文内容请购买。
一种双割线折线法求解信赖域子问题

一种双割线折线法求解信赖域子问题
王希云;邵安
【期刊名称】《应用数学》
【年(卷),期】2012(25)2
【摘要】结合利用Hessian阵的特征值性质,本文提出求解信赖域子问题的一种双割线折线法,它不同于Powell的单折线,Dennis的双折线和赵英良的切线单折线.在适当条件下,分析双割线折线路径的性质,且证明了算法的收敛性.数值试验表明,这种新算法是有效且可行的.
【总页数】6页(P419-424)
【关键词】无约束最优化;信赖域方法;最优曲线;双割线折线法
【作者】王希云;邵安
【作者单位】太原科技大学应用科学学院
【正文语种】中文
【中图分类】O221
【相关文献】
1.预处理混合割线法求解信赖域子问题 [J], 赵丹
2.一种改进的求解信赖域子问题的欧拉切线法 [J], 贾新辉;王希云;李琳俊
3.一种求解不定信赖域子问题的双割线折线法 [J], 邵安;王希云
4.求解信赖域子问题的混合双割线折线法 [J], 赵丹;
5.一种求解信赖域子问题的多割线折线算法 [J], 李亮
因版权原因,仅展示原文概要,查看原文内容请购买。
pcfi结构方程

pcfi结构方程
PCFI(Partial least squares path modeling for confirmatory factor analysis)是一种基于偏最小二乘路径模型的验证性因子分析方法。
PCFI结构方程模型将PLS(偏最小二乘)路径模型与CFA (验证性因子分析)相结合,可以用于验证性因子分析中存在的多个潜变量之间的关系。
PCFI结构方程模型的一般步骤如下:
1. 确定研究的潜变量和观测变量,并进行因子分析,得到每个潜变量的测量指标。
2. 根据理论模型和研究假设,构建潜变量之间的路径模型。
3. 使用PLS方法估计路径模型的参数,并计算路径系数的显著性。
4. 根据模型拟合指标,评估模型的拟合度。
5. 对模型进行修正和改进,直至达到满意的拟合度。
6. 进行模型的解释和结果的验证。
PCFI结构方程模型相比传统的CFA方法,具有以下优点:
1. PLS方法可以处理小样本和非正态数据,对样本要求较低。
2. PLS方法可以同时估计潜变量和观测变量之间的关系,不需要事先估计潜变量的协方差矩阵。
3. PLS方法可以通过Bootstrap方法计算路径系数的显著性,提供更稳健的推断结果。
4. PCFI结构方程模型可以同时估计多个潜变量之间的关系,能够
更全面地分析研究问题。
PCFI结构方程模型是一种结合了PLS路径模型和CFA的统计方法,可以用于验证性因子分析中多个潜变量之间的关系。
它在小样本和非正态数据分析中具有一定的优势,可以提供更稳健和全面的分析结果。
一种基于迭代提取关键点的曲线拟合新算法

一种基于迭代提取关键点的曲线拟合新算法
荆晶;刘玉兰;葛庆平
【期刊名称】《首都师范大学学报:自然科学版》
【年(卷),期】2004(0)S1
【摘要】在计算机辅助设计及相关领域中 ,需要对曲线进行精确的拟合 ,针对这一需求 ,提出了一种基于迭代提取关键点的曲线拟合新算法 .在该算法中 ,对两个端点之间的一段曲线迭代寻找关键点 ,当相邻两曲线段上加上关键点时则删除他们之间的一个原有关键点 ,以减少关键点数量 .算法用阈值T作为结束条件来控制精度 .由于T值可变 ,设计者可根据不同需求自行设置T值直到满足某一特定的要求为止 .文中给出了算法的原理、实现过程以及试验结果 .结果表明 ,该算法计算简单 ,以少而精确的关键点使曲线进行拟合达到较好的效果 .
【总页数】4页(P22-25)
【关键词】关键点;曲率;迭代;距离;曲线拟合
【作者】荆晶;刘玉兰;葛庆平
【作者单位】首都师范大学信息工程学院
【正文语种】中文
【中图分类】TP391.72
【相关文献】
1.一种新的基于曲线拟合的干涉光谱图像压缩算法 [J], 邓家先;黄艳
2.一种新的基于RVM的视频关键帧语义提取算法 [J], 吴昌;王万良;蒋一波
3.一种基于曲线拟合提取干涉条纹中心点的新方法 [J], 蔡怀宇;于毅;黄战华;司骞;于文铮
4.基于轮廓关键点的B样条曲线拟合算法 [J], 韩江;江本赤;夏链;李大柱
5.基于Harris3D关键点提取和RANSAC算法的改进ICP算法研究 [J], 华宇宁;刘永俊
因版权原因,仅展示原文概要,查看原文内容请购买。
小样本条件下智能布点代理模型及优化设计

小样本条件下智能布点代理模型及优化设计
金亮;张哲瑄;杨庆新;张闯;刘素贞
【期刊名称】《电机与控制学报》
【年(卷),期】2022(26)8
【摘要】传统典型代理模型需要使用大量样本点实现高精度全局预测,对时间和计算资源的消耗很难满足工程和科学计算所需,鉴于优化设计依赖代理模型和优化算法,提出一种小样本条件下实现高效预测的智能布点模型。
考虑到优化问题只需构建帕累托前沿附近(局部)的高精度代理模型,通过信赖域思想改进并实现智能布点方法,其采样空间与代理模型会根据预测精度的需求进行更新,提高了代理模型更新效率和预测精度。
以小型非晶合金变压器为验证案例,在只有70组样本数据下对比了智能布点代理模型和传统典型正交实验方法,结果表明智能布点代理模型的预测精度相比传统代理模型提高了16%左右,验证了该代理模型在少样本情况下的有效建模和预测精度,并进行了优化设计。
【总页数】10页(P40-49)
【作者】金亮;张哲瑄;杨庆新;张闯;刘素贞
【作者单位】河北工业大学省部共建电工装备可靠性与智能化国家重点实验室【正文语种】中文
【中图分类】TM461
【相关文献】
1.小样本条件下双应力步降加速退化试验优化设计
2.小样本条件下步降加速退化试验优化设计
3.一种基于智能布点技术的空间映射近似模型方法及其在拉延筋设计优化中的应用
4.融合智能算法和代理模型的天线快速优化平台设计
5.基于智能布点技术的近似模型优化研究及其在冲压成形中的应用
因版权原因,仅展示原文概要,查看原文内容请购买。
协方差驱动随机子空间辨识的参数敏感性分析
协方差驱动随机子空间辨识的参数敏感性分析
赵丽洁;高晓建;练继建
【期刊名称】《噪声与振动控制》
【年(卷),期】2024(44)1
【摘要】协方差驱动随机子空间辨识(Covariance-driven Stochastic Subspace Identification,SSI-cov)是近年来发展较为成熟的工作模态分析方法。
针对其识别精度和效率对参数设置具有较高敏感性的问题,基于敏感性分析方法,利用奇异熵增量跳跃点明显程度、频率平均识别误差、阻尼比总变异系数、振型平均模态置信因子、运行时间5种评价指标以及稳定图,通过一经典五自由度层模型仿真算例,研究Toeplitz矩阵行块数、采样频率、数据长度对SSI-cov识别结果的影响规律。
并给出既能满足精度要求又可控制程序运行时间的参数建议取值范围。
最后,通过一缩尺三层框架模型在白噪声激励下实测数据对提出的根据SSI-cov改进参数设置进行验证,结果表明提出的各参数建议取值范围均较为合理。
【总页数】8页(P29-36)
【作者】赵丽洁;高晓建;练继建
【作者单位】河北工程大学土木工程学院;天津大学建筑工程学院
【正文语种】中文
【中图分类】TU317
【相关文献】
1.协方差驱动随机子空间算法的梁桥模态参数识别
2.数据驱动与协方差驱动随机子空间法差异化分析
3.协方差驱动子空间模态参数辨识方法改进分析
4.基于双协方差随机子空间识别的类噪声数据低频振荡辨识
5.基于敏感性分析的协方差随机子空间方法参数优化
因版权原因,仅展示原文概要,查看原文内容请购买。
基于改进BP神经网络的税收收入预测模型

基于改进BP神经网络的税收收入预测模型
顾军华;宋丽娟;赵文海;宋洁
【期刊名称】《河北工业大学学报》
【年(卷),期】2003(032)001
【摘要】针对税收收入预测的特点,提出了一种综合共轭梯度和自适应变步长的改进BP算法,并利用改进的BP算法建立了税收收入预测模型,通过与传统回归分析预测方法结果的比较,证明了该算法收敛速度快,学习精度高,而且有效避免了常规BP 算法得局部极小值问题.
【总页数】5页(P39-43)
【作者】顾军华;宋丽娟;赵文海;宋洁
【作者单位】河北工业大学,计算机科学与软件学院,天津300130;河北工业大学,计算机科学与软件学院,天津300130;河北省财政厅,河北,石家庄,051500;河北工业大学,计算机科学与软件学院,天津300130
【正文语种】中文
【中图分类】TP183
【相关文献】
1.基于改进BP神经网络的供热负荷预测模型 [J], 李思琦;蒋志坚
2.基于改进BP神经网络的供热负荷预测模型 [J], 李思琦[1];蒋志坚[1]
3.基于改进BP神经网络的光伏发电预测模型 [J], 何家裕;吴杰康;杨金文;余方明;庄仲;梁继深
4.基于改进BP神经网络的页岩地应力预测模型 [J], 尚福华;王玮卿;曹茂俊
5.基于贝叶斯正则化改进BP神经网络的页岩气有机碳含量预测模型 [J], 袁颖;谭丁;于少将;李杨;韩冰
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
14.20max. 71.00min.
Y
NOTE.6
Y
12.00 max. (INSIDE OF EMI-FINGER)
C
37.80 ±0.5
41.00 max. (INSIDE OF EMI-FINGER)
0.1 M
B
C
A
W
NOTE.3
NOTE.5
85.60 ±0.25 (WIDTH OF CAGE) HOST BOARD POSITION
8.50 ±0.15
B C
B
SEC. W-W (NOTE.3)
DETAIL V
4-1.15 min. (HEIGHT OF LOCK TAB)
DIE ROLL SIDE (NOTE.7)
0.05 C A B
0.30
0.90
SEC. W-W 2.90 ±0.10
D
D
5.30 ±0.10
4.30
-C-
0.1
0.10
E
E
F
CLASS
F
CFP2-BASELINE-DRAWING
TITLE
Sheet No. REV.
HOST CONNECTOR
1 2 3 4 5 6 7
3/14 1A
8
A3-B1-SW006
B
B
13.55 ±0.15
9.55 ±0.05
10.55
6.40
0.30 31.70 ±0.05
0.05 A C B
0.60 ±0.05
9.95 ±0.05 10.55
C
C
0.1
A
C
B
0.05
B
C
A
2-30.15 ±0.08
0.1 A C B
2-0.95 ±0.05 1.00 8.05 ±0.05
2-3.00 ±0.08 1.80
1
2
3
4
5
6
7
8
0.1 M
B
C
A
2-42.10 ±0.1 (NOTE 1.)
A
0.1 M B C A
DETAIL T
5.20 ±0.15
DETAIL U
4-2.90 ±0.15
2-12.80 ±0.1 (NOTE 1.)
A
5.20 ±0.15
W
86.60 min.:OUTSIDE OF EMI-FINGER
DETAIL A
W
4-1.40 ±0.05 6.70 ±0.05 0.95 ±0.08
B B
PIN 1 1.20 ±0.05
0.1 B A C
W
1.20 ±0.05
-B-
5.50 ±0.05 PIN 52
CRUSH RIB
C
C
32.50 (ALIGNMENT PIN PITCH) C0.55
A
4.70 ±0.1 2.30 ±0.04
Sheet No. REV.
TITLE
PLUG CONNECTOR
8
1/14 1A
A3-B1-SW006
1
2
3
4
5
6
7
1
2
3
4
5
6
7
8
32.25 ±0.1
A
-A-
A
0.6x51= 30.60 0.40 ±0.15 2- 15.30 0.60
-C-
2-C0.50 ±0.10 1.20
-B-
B
B
1.00 ±0.03
-A-
C0.30 ±0.10
B
B
2.00 ±0.10 6.00 ±0.2
4.10 max.
5.525
A
A
2-R2.00 ±0.10
R2.00 ±0.10
CENTER LINES OF OPTICAL CONNECTOR
3.40 max. (NOTE.1)
C
2.50 max.(LOW PROFILE: NOTE.1) 107.50 ±0.2 91.50 min. 1.6
C
B
2-C0.3±0.1 0.12 12.40 ±0.2 PIN 53 PIN 104
X
D
X A
-D-
5.90 ±0.5
1.60 max.
54.10 ±0.10
MATING PLANE
-B-
-C-
PIN 52 3.90 ±0.15 8.05±0.2 31.40 ±0.04
0.2 M A C
PIN 1
D
T
1.80±0.05 (CONTACT AREA)
32.40 ±0.05
3..03
2.60 ±0.04 1.25
0.05 -CB C A
2-2.20±0.1 32.40 ±0.05
0.08 A C B
T
+0.25 1.20 -0.10
10.55 ±0.05
8.55 ±0.10 LENGTH OF SIGNAL CONTACT
SEC. C-C 37.75 ±0.05
E
E
4-R0.20 ±0.10
MATING PLANE
F
F
DETAIL C (CUTOUT FOR DATUM "-D-" INSPECTION)
1 2 3 4 5 6 7
CLASS
CFP2-BASELINE-DRAWING
TITLE
Sheet No. REV.
CFP2 MODULE
5/14
8
1A
A3-B1-SW006
1.20 ±0.40 15.65 ±0.05
SEC. B-B 2.35 ±0.15
2.94 ±0.05
0.05 M B C A
B
1.60 ±0.08 4.40
B
7.15 ±0.10
EMI GASKET PROTECT
42.60 20.45 4.40 ±0.05
TBD(33.50 ±0.05)
C
0.95 ±0.1 14.35 ±0.05 (BOTTOM SPACE)
1 2 3 4 5 6 7
F
CLASS
CFP2-BASELINE-DRAWING
Sheet No.
TITLE
HOST CAGE
8
6/14
1A
A3-B1-SW006
1
2
3
4
5
6
7
8
M1.4 THREAD
A
1.60 ±0.08
A
1.60 ±0.08 M1.4 THREAD M1.4 THREAD
0.1 M A C B
0.05 B A C
0.35 ±0.03
0.05 A B C
30
.00
°
1.00 ±0.10
C
C
D
D
E
E
F
CLASS
F
CFP2-BASELINE-DRAWING
Sheet No. REV.
TITLE
MODULE BOARD
1 2 3 4 5 6 7 8
2/14 1A
A3-B1-SW006
1
2
3
4
5
4-C0.3±0.1
D
OPTICAL CONNECTOR HOUSING MUST BE WITHIN THIS RANGE.
2.00 min. WIDTH OF LATCH DETAIL A (CUTOUT FOR DATUM "-D-" INSPECTION) NOTE.4 15.00 ±0.10 4-R0.30 ±0.10 0.40 ±0.10
1
2
3
4
5
6
7
8
SECTION
A
34.45 ±0.1
0.08 A C B
A
31.40 ±0.04 (Width of Plug connector)
-A-
3.60
BOARD STOP POSITION 1.70 1.10
2- 15.30 0.60 (PITCH)
104-0.35 ±0.04
0.1 A C B
6
7
8
34.30 ±0.05 (Width of connector)
0.08 B A C
A
31.48 ±0.04 (Width of Slot)
0.08 -AB C
A
0.60 (PITCH) PIN 104 TBD (0.23 ±0.05)
0.1 A B C
2- 15.30
10.45 ±0.1 PIN 53 9.90 ±0.08
E
4-R0.30 min.
E
NOTE.1
9.85 ±0.15 LENGTH OF GND CONTACT
F
NOTE 1. RECOMMEND: SPRING STIFFNESS TO BE 3.5-7.0N/mm IN NOTED DIRECTION.
F
CLASS
CFP2-BASELINE-DRAWING
0.50 ±0.05 (NOTE.2) 1.40 max.
REV.
SEC. X-X
2-42.20 ±0.10 (INSIDE OF WALL)
14.55min. OUTSIDE OF EMI-FINGER
T X
13.80 REF.
D
KICK-BACK SPRING (OPTION)