多自由度超声波电机的研究现状与发展趋势
超声波技术国内外技术现状和发展趋势
超声波技术国内外技术现状和发展趋势嘿,咱今儿个就来唠唠超声波技术这档子事儿。
你知道不,这超声波技术啊,那可是相当厉害的存在呢!在国内,那发展得也是风生水起呀。
好多领域都能瞧见它的身影呢!就好比说在医疗领域,超声波检查那可是帮了大忙啦,能让医生清楚地看到人体内部的情况,就好像给身体来了个“透视”,这多牛啊!还有在工业上,利用超声波进行探伤、清洗啥的,那效率也是高高的。
再看看国外,人家那技术也是不容小觑呀。
国外的科研人员那是不断钻研,把超声波技术玩得团团转。
他们在一些高端制造领域,用超声波技术打造出了超级精细的产品,哇塞,简直让人惊叹不已!那你说这超声波技术以后会咋发展呢?我觉着吧,肯定是越来越牛!说不定以后啊,用超声波就能直接治病了呢,不用开刀不用吃药,“嗖”的一下病就好了,你说神不神?而且啊,在工业上的应用肯定也会更加广泛,什么更复杂的材料都能处理得妥妥当当。
这超声波技术就像是一个潜力无限的宝藏,等着人们不断去挖掘呢!你想想看,要是以后家里的各种东西都能靠超声波来维护保养,那得多方便啊!就像家里的电器啥的,用超声波“扫一扫”,嘿,立马焕然一新,那多棒呀!还有啊,随着科技的不断进步,超声波技术和其他技术的结合肯定也会越来越多。
比如说和人工智能结合,那可就厉害了,能自动检测、自动处理,哇,那简直就是科幻电影里的场景呀!咱可不能小瞧了这超声波技术,它现在已经给我们的生活带来了很多便利,以后肯定还会有更多的惊喜等着我们呢!它就像一个无声的英雄,默默地在各个领域发挥着重要的作用。
咱得好好关注这超声波技术的发展呀,说不定哪天它就会给我们带来意想不到的大惊喜呢!你说是不是?咱可得跟上时代的步伐,别被这快速发展的科技给落下咯!。
超声波电动机发展现状及应用

0引 言
传 统 电磁式 电机是 依据 电磁感 应定 律 和 电磁 力
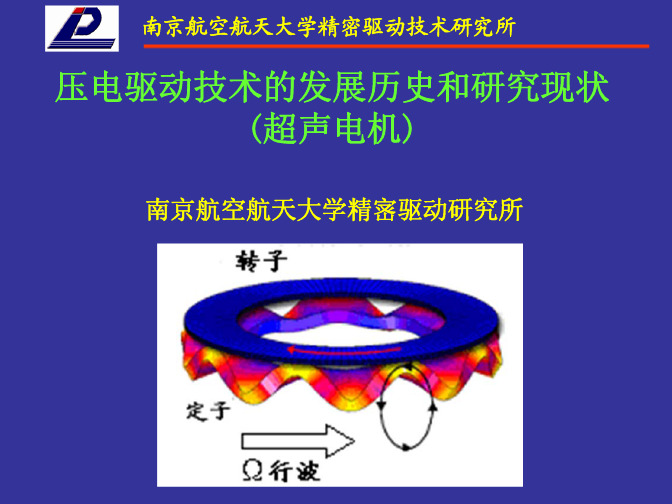
1超声波 电动机的基本原理及基本结构
超声 波 电动机 利用压 电材 料 的逆压 电效 应将 高 频 的 电能转化 成定 子 的高 频机 械振 动 能 量 , 定 子 使 达 到机械 共振 状态 , 然后 通 过 定 子 和转 子 之 间 的摩 擦 力驱 动转 子运动 … 。 图 1是 超 声 波 电动 机 基 本 结 构 , 由壳 体 、 它 轴 承、 转子 、 子 、 簧 、 电陶瓷等组 成 。与传 统 电机 定 蝶 压 的最重要 的区别在 于 电机 中既没有 线 圈也没 有永 磁
矩, 具有无 电磁 干 扰 、 应迅 速 等 特 点 , 响 因而迅 速发
超 声 波
体, 其定子 由弹性体和压电陶瓷构成 , 转子由金属板
-
e d a e s T e b sc p n i l fu t s n c moo s a d s c u e w r e c b d T e d v lp n r s e t , d a tg s n r a . h a i r cp e o l a o i i r tr n t t r e e d s r e . h e eo me tp o p cs a v na e u r i
及 质 量 、 积等 局 限性 , 难 满 足 这些 特 殊 的需 要 。 体 很
随着压电陶瓷等材料的发展 , 超声波 电动机作 为一 种全新概念 的新型电机在 2 世纪 8 0 0年代开始发展 起来 , 它利 用压 电材 料 的逆 压 电效应 , 在超 声频 率段
内使 定子 发生 振动 , 在通过 定 、 转子 间的摩 擦获 得扭
定律实现机 电能量转换 和信号传递与转换 的装置。 传统电磁式 电机在理论 、 设计 、 制造方法以及控制技
超声电机的发展历史和研究现状
电磁电机 超声电机
响应特性的比较
快速响应演示装置
超声电机分辨率:0.79” 伺服电机分辨率:9.89” 步进电机分辨率:25.5”
南京航空航天大学精密驱动技术研究所
* 断电自锁
超声电机
电磁电机
南京航空航天大学精密驱动技术研究所
* 电磁兼容性好; * 噪声小(在 100 毫米之内, <45 分贝); * 可在真空和高/低温下工作; * 形状多样化:圆形、方形、圆环形和圆柱形等; * 超声电机的效率不随尺寸减小而下降。
南京航空航天大学精密驱动技术研究所
1、基于纵振模态
Vr
Vr
Vs
Vs
Sashida提出的首台驻波型超声电机原理
Kurosawa利用两个基于纵向振 动模态的定子的组合,研制成了驱 动效率较高的直线型电机
优点:机电转换效率高,陶瓷片分区形式简单 缺点:摩擦磨损问题严重
南京航空航天大学精密驱动技术研究所
南京航空航天大学精密驱动技术研究所
三、超声电机的发展历史与现状
国外 1、概念提出阶段(20世纪40年代-70年代) (1)BaTiO3陶瓷的制备技术 (2)1948年Williams和Brown申请第一 个“压电马达”专利 (3)1961年Bulova公司利用弹性振动驱 动钟表 (4)1973年IBM公司的Barth提出超声电 机方案
智能材料集感知、驱动和信息处理于一体, 形成类似生物材料那样的具有智能属性的材料, 具有自感知、自诊断、自适应、自修复等功能。
南京航空航天大学精密驱动技术研究所
1.超声电机(Ultrasonic motor, Ultrasonic wave
motor, Piezoelectric motor, Piezomotor, USM):
超声波电机行业市场现状分析及未来三到五年发展趋势报告
超声波电机行业市场现状分析及未来三到五年发展趋势报告Analysis of the Current Situation of the Ultrasonic Motor Industry Market and Future Development Trends in the Next Three to Five Years超声波电机行业市场现状分析及未来三到五年发展趋势报告Introduction:介绍:The ultrasonic motor industry has witnessed significant growth in recent years due to its wide range of applications in various industries such as automotive, healthcare, and consumer electronics. This article aims to analyze the current market situation of the ultrasonic motor industry and provide insights into the future development trends for the next three to five years.超声波电机行业近年来得到了显著发展,其在汽车、医疗保健和消费电子等各行业中的广泛应用是其增长的主要原因。
本文旨在分析超声波电机行业的市场现状,并提供未来三到五年发展趋势的见解。
Current Market Situation:市场现状:The ultrasonic motor market is currently experiencing steady growth and is expected to continue expanding in the coming years. The market is driven by the increasing demand for energy-efficient and high-performance motors in various industries. The automotive sector is one of the key drivers of the market growth, as ultrasonic motors are widely used in electric vehicles and advanced driver assistance systems (ADAS).目前,超声波电机市场正稳步增长,并有望在未来几年继续扩大。
2024年超声波设备市场前景分析

2024年超声波设备市场前景分析引言超声波技术是一种应用广泛的非侵入性检测技术,它在医疗、工业、农业等领域都有着重要的应用。
随着科技的不断进步和人们对健康和生产效率的不断追求,超声波设备市场呈现出巨大的潜力。
本文将对超声波设备市场的发展趋势进行分析,并展望其未来的前景。
市场规模与增长趋势随着超声波技术的不断突破和应用领域的拓展,超声波设备市场呈现出快速增长的态势。
根据市场研究报告,2019年全球超声波设备市场规模已经达到X亿美元,并预计到2025年将超过X亿美元。
这一市场规模的急剧增长背后,有以下几个重要因素的推动。
医疗行业的需求增长医疗成像领域是超声波设备的主要应用领域之一。
随着人口老龄化加剧和医疗技术的进步,对于早期诊断和治疗精准性的需求不断增加。
超声波技术具有无辐射、操作简便等优点,成为许多医疗机构的首选。
预计未来几年内,医疗行业对超声波设备的需求将继续增长。
工业领域的应用拓展超声波技术在工业领域有着广泛的应用,如材料检测、液体测量、非破坏性测试等。
随着工业自动化的推进和质量控制要求的提高,超声波设备在工业领域的应用前景十分广阔。
预计未来几年内,随着各行业的需求增加,超声波设备在工业领域的市场规模也将持续扩大。
新兴市场的崛起亚太地区是全球超声波设备市场的主要增长动力之一。
发展中国家对于医疗设备的需求增加、工业升级和经济增长的推动,使得亚太地区成为超声波设备市场增长最快的地区之一。
预计未来几年内,亚太地区的超声波设备市场规模将继续扩大。
市场竞争格局超声波设备市场具有较高的进入门槛,技术密集度较高。
目前,全球超声波设备市场主要由几家大型企业垄断,如GE Healthcare、Philips Healthcare等。
这些企业凭借品牌优势、技术实力和广泛的销售渠道,占据着市场的较大份额。
此外,还有一些中小型企业通过技术创新和市场定位寻求突破,如Mindray、Toshiba等。
发展趋势与前景展望技术创新驱动市场发展随着技术的不断创新,超声波设备的性能和功能不断提升。
超声电机的研究现状及其进展
1 直线型超声电机的研究现状和动态
如ꎬ日本最早开发出真正达到具有商业应用价值的超声电
机ꎬ并成功引入到商业应用领域ꎬ广泛应用在相机镜头的
直线超声电机可以直接将定子的超声振动转换成动
基金项目:福建省中青年教师教育科研项目资助项目( JAT201347)
适应月球表面环境要求ꎬ可精确地控制光谱仪等仪器ꎬ其
共振为核心驱动原理ꎬ利用压电陶瓷的逆压电效应将输入
换成转子(动子)做旋转(直线)运动ꎬ将定子的振动能转换
为转子(动子)的宏观能量输出ꎬ实现对负载驱动[1-2] ꎮ
与传统电磁电机相比ꎬ超声电机具有结构简单、小型轻
量、能量密度大、响应快( 毫 秒 级)、定 位 精 度 高 ( 高 分 辨
起到很重要的支撑ꎬ可满足-120 ℃ ~ 180 ℃ 的工况要求和
作用很关键ꎮ
超声电机涉及到机械、材料、控制和摩擦学等多门学
科ꎬ是微特电机和微驱动技术领域的研究热点ꎮ 因此ꎬ国
内外学者开展了大量的研究工作ꎬ成功研制了多种不同驱
率)、无电磁干扰、断电自锁、可直接驱动等诸多优点ꎬ此外ꎬ
动机理、不同结构形式的超声电机ꎮ 本文针对直线型、旋
产物ꎬ涉及振动学、摩擦学、动态设计、电力电子、自动控制、
并广泛应用在精密定位平台系列产品ꎬ具有很高的分辨率
新材料和新工艺等学科的新技术ꎬ在 20 世纪得到了迅速发
公司和德国 PI 公司都开发出商业用途的直线超声电机ꎬ
和优良的启停特性ꎬ可以实现高运动精度和稳定性ꎻ我国
展ꎮ 它不像传统的电机那样利用电磁的交叉力来获得其运
和美国都将超声电机应用到航天工程ꎬ美国首先将超声电
动和力矩ꎮ 超声电机是以压电材料的逆压电效应激发定子
中国超声波电机市场现状分析
北京中元智盛市场研究有限公司目录中国超声波电机市场现状分析 (2)第一节2012-2016年中国超声波电机产量分析 (2)第二节2012-2016年中国超声波电机价格分析 (3)第三节2017-2021年超声波电机市场走势预测 (3)中国超声波电机市场现状分析第一节2012-2016年中国超声波电机产量分析人们对超声波电机的研究开始于二十世纪六十年代。
超声波电机是在1961年,Bulova钟表公司首次开始应用它作为动力。
从目前的情况看,超声波电机会有更广阔的空间,超声波电机的应用也日益扩大。
目前,世界上有几家大公司是这一领域的领头雁,美国的IBM公司和日本的松下公司都是这一领域的先锋。
我国在这一领域,开始的比较晚,是80年代才开始做这方面的研究。
因此,在这一领域也发展的不完善,然而随着超声波电机的庞大市场需求,现在越来越多的企业进入产品生产领域,超声波电机作为产品,在更广泛的行业中应用。
根据国内相关企业生产情况,2012-2016年我国超声波电机产量变化:图表- 1:2012-2016年我国超声波电机产量变化数据来源:中国电器工业协会微电机分会由上图,我国在2012-2016年间在超声波电机方面发展较快,行业产量以年均10%以上的幅度上涨,行业整体产量由2012年的1.21亿台上涨到2016年的1.94亿台。
2第二节2012-2016年中国超声波电机价格分析由于超声波电机产品在多个方面均有所应用,不同行业对于超声波电机的需求有所不同导致产品在外形、性质等方面有所差异,相关产品价格也有所不同。
根据行业内样本企业销售情况对超声波电机产品市场销售均价进行如下分析:图表- 2:2012-2016年我国超声波电机产品市场均价变化数据来源:样本企业产品价格第三节2017-2021年超声波电机市场走势预测根据2012-2016年我国超声波电机市场产品产量变化情况,对2017-2021年行业超声波电机产品产量预测如下:3图表- 3:2017-2021年行业超声波电机产品产量预测数据来源:中国电器工业协会微电机分会由于下游需求市场规模持续扩大,预计在2017-2021年我国超声波电机产品产量仍将有所增长,预计2021年行业整体产量将突破3亿台。
电机行业国内外研究现状及发展趋势
.. 电机行业国内外研究现状及发展趋势1、现状国外公司注重新产品开发,在电机的安全、噪声、电磁兼容等方面很重视。
国外的先进水平主要体现在电机的可靠性高,寿命长,通用化程度高,电机效率不断提高,噪声低,重量轻,电机外形美观,绝缘等级采用F级和H级,而且也考虑电机制造成本的降低等国内虽有部分产品已达90年代初的国际水平,但相当部分的产品可靠性差,重量重,体积大和噪声大,综合水平只相当于80年代初期国际水平,其主要原因是制造工艺落后,关键材料的质量和品种不能满足要求,科研和设计工作没有跟上,科研投入少,新产品开发资金匮乏,企业技术创新能力较弱。
2、电机行业发展趋势新型、特种电机仍将是与新原理;新结构;新材料;新工艺;新方法联系最密切;发展最活跃;也最富想象力的学科分支,并将进一步深入渗透到人类生产和生活的所有领域之中。
随着人类生活品质的不断提升,绿色电机的概念已经提出并被人们所接受。
虽然这个概念目前还是抽象的,但从环保角度看,低震动;低噪声;无电磁干扰;有再生利用能力以及高效率;高可靠性是一些最起码的要求,这对电机的设计制造和运行控制,尤其是原理;结构;材料;工艺等,无疑是一种新的挑战。
此外,随着工业自动化的不断发展,智能化电机或智能化电力传动的概念也被越来越多的人们所认可。
这种智能化包含两个方面的内容:其一是系统所具有的控制能力和学习能力,另一方面就是电机的容错运行能力,既要求研制所谓容错型电机。
容错型电机的定义还不太确切,其基本要求就是以安全为前提,允许电机在故障和误操作情况下的容错运行,直至故障消除或系统自动控制恢复。
这对于传统的电机运行观念,无疑也是一个严峻的挑战。
需要特别强调的是,近代科学技术,特别是计算机技术对电机学科的影响是巨大的,意义是深远的。
电机的传统内涵已经发生着极大的变化,研究内容拓宽了,研究方法改进了,研究手段也丰富了。
新的观念在形成,新的交叉学科在产生,老学科确实重新焕发了出了生机和魅力。
超声波电机的发展及应用

超声波电机的发展及应用1.超声波电动机原理超声波电动机(Ultrasonic Motor缩写USM)是以超声频域的机械振动为驱动源的驱动器。
是国外近20年发展起来的一种新型电机。
与传统的电机不同,超声波电机无绕组和磁极,无需通过电磁作用产生运动力。
一般由振动体(相当于传统电机中的定子,由压电陶瓷和金属弹性材料制成)和移动体(相当于传统电机中的转子,由弹性体和摩擦材料及塑料等制成)组成。
在振动体的压电陶瓷振子上加高频交流电压时,利用逆压电效应或电致伸缩效应使定子在超声频段(频率为20KHZ以上)产生微观机械振动。
并将这种振动通过共振放大和摩擦耦合变换成旋转或直线型运动。
逆压电效应能够在振动体内激发出几十千赫的超声波振动 ,使振动体表面起驱动作用的质点形成一定运动轨迹的超声波频率的微观振动(振幅一般为数微米) ,如椭圆、李萨如轨迹等 ,该微观振动通过振动体和移动体之间的摩擦作用使移动体沿某一方向做连续宏观运动。
因此 ,超声波电机是将弹性材料的微观形变通过共振放大和摩擦耦合转换成转子或滑块的宏观运动。
近几年发展出了多种超声波电机,如环形行波USM、步进USM、多自由度USM等,且行波型USM 已有较成熟的设计。
下面来说明一下行波型USM的原理。
行波型USM要旋转,需要具备两个条件:与转子相接触的定子表面质点须做椭圆运动 ,定子、转子之间的接触面须有摩擦力。
图 1 中的弹性体为定子 ,其上部为转子 ,定子、转子间夹一层摩擦材料。
摩擦材料一般粘接在转子表面上。
利用电能激励压电陶瓷复合振子 ,使之产生超声振动 ,并在弹性体内产生行波。
当电信号频率调整到与定子(弹性体) 的机械共振频率一致时 , 定子的振动幅度最大 , 并形成行波。
在行波的弯曲传播过程中 ,定子表面的质点就会形成椭圆振动轨迹。
当无数个这样的粒子都以同相位振动时 ,就会在定子表面形成力矩 ,力矩方向与行波传播方向相反。
该力矩依靠定子、转子间的摩擦力驱动转子运动。
超声波行业市场现状分析及未来三到五年发展趋势报告
超声波行业市场现状分析及未来三到五年发展趋势报告Title: Analysis of the Current State and Future Development Trends of the Ultrasonic Industry Market: A Report for the Next Three to Five YearsAbstract:This report aims to analyze the current state of the ultrasonic industry market and provide insights into its future development trends for the next three to five years. The ultrasonic industry has experienced significant growth in recent years, driven by advancements in technology and increasing applications across various sectors. This report will explore the market size, key players, major applications, and challenges faced by the ultrasonic industry. Additionally, it will highlight the potential growth opportunities and trends that are expected to shape the industry in the coming years.1. Introduction:The ultrasonic industry has witnessed substantial growth due to its wide range of applications in sectors such ashealthcare, manufacturing, automotive, and consumer electronics. Ultrasonic technology utilizes sound waves with frequencies higher than the audible range, enablingnon-destructive testing, cleaning, and imaging processes. This report will analyze the current market landscape and provide insights into the future prospects of the ultrasonic industry.1.1 Market Size:The global ultrasonic industry market size reached USD XX billion in 2020 and is expected to grow at a CAGR of XX during the forecast period. The increasing demand for non-destructive testing, precision cleaning, and imaging applications across various industries is a significant driver for market growth.1.2 Key Players:The ultrasonic industry is highly competitive, with several key players dominating the market. Some of the major players include Company A, Company B, and Company C. These companies are continuously investing in research and development to innovate and expand their product portfolios.2. Market Analysis:2.1 Major Applications:The ultrasonic industry finds applications in various sectors. In the healthcare industry, ultrasonic devices are used for diagnostic imaging, therapeutic applications, and surgical procedures. In the manufacturing sector, ultrasonic technology is utilized for non-destructive testing, precision cleaning, and welding. Additionally, ultrasonic sensors are widely employed in automotive and consumer electronics for proximity detection and gesture recognition.2.2 Challenges:Despite the growth prospects, the ultrasonic industry faces certain challenges. High initial investment costs, limited awareness about the benefits of ultrasonic technology, and the availability of alternative technologies pose challenges to market growth. Additionally, stringent regulations and standards for medical devices and industrial applications may impact market expansion.3. Future Development Trends:3.1 Growing Demand for Non-Destructive Testing:The demand for non-destructive testing is expected to increase significantly in the coming years, driven by the need for quality control and safety assurance across industries. Ultrasonic testing provides accurate and reliable results, making it a preferred choice for inspecting critical components and structures.3.2 Technological Advancements:Advancements in ultrasonic technology, such as the development of high-frequency transducers, improved imaging capabilities, and integration of artificial intelligence, are expected to drive market growth. These advancements will enhance the accuracy, efficiency, and functionality of ultrasonic devices, expanding their applications further.3.3 Increasing Adoption in Emerging Economies:The ultrasonic industry is witnessing increasing adoption in emerging economies due to rapid industrialization, infrastructure development, and rising healthcare expenditure. These economies offer significant growth opportunities for market players, especially in sectors such as manufacturing,construction, and healthcare.Conclusion:The ultrasonic industry market is poised for significant growth in the next three to five years. The increasing demand for non-destructive testing, precision cleaning, and imaging applications, coupled with technological advancements, will drive market expansion. However, challenges such as high initial investment costs and limited awareness need to be addressed. Overall, the ultrasonic industry is expected to witness robust growth and present lucrative opportunities for both existing and new market players.中文回答:标题:超声波行业市场现状分析及未来三到五年发展趋势报告摘要:本报告旨在分析超声波行业市场的现状,并提供未来三到五年发展趋势的见解。
2024年超声波电机市场规模分析
2024年超声波电机市场规模分析引言超声波电机是一种利用超声波效应产生驱动力的电机。
随着科技的发展和应用领域的扩大,超声波电机在工业制造、医疗设备、消费电子等领域得到了广泛应用。
本文将对超声波电机市场规模进行分析,并探讨其发展趋势和前景。
市场规模分析全球市场超声波电机市场在全球范围内呈现出持续增长的趋势。
据市场研究报告显示,2019年全球超声波电机市场规模约为XX亿美元,预计到2025年将增长至XX亿美元,年复合增长率为XX%。
区域市场在区域市场方面,亚太地区是超声波电机市场的主要增长驱动力。
亚太地区的制造业发展迅速,对于高精度、低噪音和高效能的电机需求不断增加,这促使了超声波电机市场的快速增长。
预计未来几年内,亚太地区的超声波电机市场将保持较高的增长率。
应用领域超声波电机在多个应用领域具有广泛的市场需求。
其中,工业制造领域是超声波电机的主要应用市场。
超声波电机的高精度和高效能特性使其在自动化设备、机器人和精密加工设备中得到广泛应用。
医疗设备领域也是超声波电机的重要应用市场,超声波电机在医疗成像设备和手术器械中的应用日益增多。
此外,消费电子、汽车工业等领域对于超声波电机的需求也在不断增加。
发展趋势与前景技术创新超声波电机市场的持续增长得益于技术的不断创新。
随着科技的发展,超声波电机的性能得到了大幅提升,如精度、效能和可靠性等方面都有了显著的改进。
此外,新材料、驱动电路和控制算法的应用也为超声波电机的发展带来了新的机遇。
自动化需求增加全球范围内对于自动化设备的需求不断增加,这为超声波电机市场带来了巨大的机遇。
自动化设备需要高精度、低噪音和高效能的电机来驱动,而超声波电机正好满足这些需求。
预计未来几年内,超声波电机市场在自动化领域将继续保持快速增长。
医疗设备市场潜力巨大随着人口老龄化趋势的加剧,医疗设备市场的需求不断增加。
超声波电机在医疗设备中具有广泛的应用前景,如医疗成像设备和手术器械等。
预计未来几年内,医疗设备领域对于超声波电机的需求将继续保持较高增长率。
2024年超声波设备市场环境分析

2024年超声波设备市场环境分析1. 引言超声波设备是一种广泛应用于医学、工业、军事等领域的高科技设备,利用超声波原理进行信号的产生、传播和接收。
随着技术的不断进步和市场需求的增长,超声波设备市场正迅速发展。
本文将从市场规模、竞争格局和市场趋势三个方面对超声波设备市场进行分析。
2. 市场规模超声波设备市场在过去几年中保持了稳定增长的态势。
根据市场研究机构的数据显示,2019年全球超声波设备市场规模达到了100亿美元,预计到2025年将增至150亿美元。
增长主要得益于医疗行业对超声波设备的需求增加以及工业领域的发展。
在医疗领域,超声波设备被广泛应用于影像诊断、妇科检查、心脏病诊断等方面。
随着老龄化人口增加和医疗技术的更新换代,对超声波设备的需求将继续增长。
同时,工业领域对超声波设备的需求也在增加,特别是在无损检测、液位测量和清洗等方面。
3. 竞争格局超声波设备市场竞争激烈,主要由几家大型跨国公司垄断市场份额。
这些公司包括GE医疗、飞利浦、西门子、日立医疗等。
它们在技术研发、生产制造和市场推广方面具有较强的优势和资源。
除了这些大型公司,还存在一些小型企业和初创公司进入市场。
它们通常在特定领域或地区有一定的市场份额,并且在产品创新和市场细分方面具有一定的优势。
然而,由于技术壁垒和资金限制,小型企业在市场份额上受到了限制。
4. 市场趋势超声波设备市场存在一些明显的趋势,值得关注。
首先,随着技术的不断进步,超声波设备的功能不断增强。
例如,新一代超声波设备将具备更高的分辨率、更广的应用范围以及更便携的特点。
这些技术创新将进一步推动市场的发展。
其次,医疗保健行业的发展和政府对医疗设备的投资也将推动超声波设备市场的增长。
随着人们对医疗服务的需求增加,超声波设备在医疗实践中的应用将得到进一步扩展。
最后,超声波设备的价格下降也是市场的一个趋势。
随着技术的成熟和竞争加剧,超声波设备的价格将逐渐降低,促使更多的用户购买和使用。
2024年大功率超声波机市场环境分析
2024年大功率超声波机市场环境分析1. 引言大功率超声波机是一种应用超声波技术的设备,具有广泛的市场需求和应用前景。
本文将对大功率超声波机的市场环境进行分析,包括市场规模、竞争态势、行业趋势等方面。
该分析将有助于企业了解市场现状,制定有效的市场战略。
2. 市场规模大功率超声波机市场在过去几年中呈现稳步增长的趋势。
随着工业生产的发展和人们对品质和效率的要求不断提高,大功率超声波机作为一种先进的加工技术得到了广泛应用。
根据市场调查数据显示,预计在未来几年中,大功率超声波机市场将保持较高的增长率。
3. 竞争态势目前,大功率超声波机市场存在一定程度的竞争。
主要竞争对手包括国内外厂商,他们在技术研发、产品质量、价格等方面展开竞争。
不同厂商的产品具有不同的特点和优势,消费者在选购时会根据实际需求进行选择。
在国内市场上,大功率超声波机的竞争主要集中在产品质量、售后服务和价格方面。
消费者对产品质量和售后服务的要求越来越高,而价格也是他们考虑的重要因素。
因此,企业需要在提供高质量产品的同时,注意控制成本,以保持竞争优势。
4. 行业趋势未来几年中,大功率超声波机市场将面临一些行业趋势的影响。
首先,随着科技的进步和工业自动化水平的提高,大功率超声波机将在更多领域得到应用。
例如,医疗、汽车、电子等行业对大功率超声波机的需求将不断增加,推动市场规模的扩大。
其次,环保意识的增强也将对大功率超声波机市场带来机遇。
大功率超声波机具有高效、无污染的特点,可以替代传统的加工方法,减少能源消耗和环境污染,因此在环保领域有广阔的市场前景。
再次,技术创新将是大功率超声波机市场的重要驱动力。
随着科技的不断进步,大功率超声波机的性能和效率将得到进一步提升,为市场带来更多机遇和挑战。
5. 总结大功率超声波机市场具有较高的增长潜力和广阔的应用前景。
在市场规模逐渐扩大的同时,竞争也在日益加剧。
为了在市场中取得竞争优势,企业应注重产品质量和售后服务,并不断推进技术创新。
2023年大功率超声波机行业市场分析现状
2023年大功率超声波机行业市场分析现状大功率超声波机是一种运用超声波技术的设备,具有广泛的应用领域,包括医疗、工业、环境等。
以下是大功率超声波机行业市场分析的现状。
首先,大功率超声波机在医疗领域具有巨大的市场潜力。
超声波技术已经成为医疗诊断和治疗领域的重要工具,大功率超声波机作为超声波技术的一种扩展应用,可以加强对肿瘤、卵巢囊肿等病变的诊断和治疗。
随着人口老龄化问题的加剧和医疗技术的不断进步,大功率超声波机在医疗设备市场中的需求将会稳步增长。
其次,大功率超声波机在工业领域也有很大的市场需求。
它可以用于清洗、焊接、切割等工艺中,具有高效、可靠、无污染等优点。
特别是在汽车制造、电子制造等领域,大功率超声波机的应用需求非常大。
随着工业自动化程度的提高和生产效率的要求,大功率超声波机市场的前景非常广阔。
此外,大功率超声波机在环境领域中也有一定的应用。
它可以用于空气净化、水处理等方面,将超声波技术与环境保护相结合,可以有效去除空气和水中的有害物质,改善环境质量。
随着人们环境保护意识的增强和环保政策的不断加强,大功率超声波机在环境领域的市场需求将会不断增加。
然而,目前大功率超声波机行业市场存在一些问题和挑战。
首先,技术门槛较高,产品研发周期较长,技术更新换代较快。
这给企业带来了技术压力和市场竞争压力。
其次,大功率超声波机市场竞争激烈,国内外众多厂商都在进行产品研发和市场拓展,导致市场份额分散。
此外,大功率超声波机价格相对较高,制约了一部分中小企业的购买能力。
综上所述,大功率超声波机行业市场潜力巨大,但也面临着挑战。
企业需要不断提升技术研发能力,缩短产品研发周期,降低产品成本,增强市场竞争力。
同时,政府也应加大对大功率超声波机行业的政策支持力度,促进行业发展,推动大功率超声波机行业进一步壮大。
多自由度超声波电机的研究进展和展望郭吉丰白洋王剑一类静电驱动...
多自由度超声波电机的研究进展和展望郭吉丰 白洋 王剑一类静电驱动微结构谐振传感器的吸合不稳定性研究及控制尚慧琳 文永蓬盾构刀盘驱动三级行星齿轮系统固有特性及灵敏度分析齐寅明 龚宪生 张干清 孙胜苗基于MoGHMM的齿轮箱状态识别与剩余使用寿命预测研究张星辉 康建设 高存明 曹端超 滕红智漂浮特性对风力发电机振动影响金鑫 钟翔 何玉林 杜静 李奇敏深海顶张式立管顺流涡激振动响应预报方法曲雪 薛鸿祥 唐文勇草帽型大跨空间结构的风压数值模拟与关键参数影响分析陈怡然 周岱 归洛圣钢管混凝土框架RC剪力墙混合结构滞回性能分析王文达 魏国强 李华伟滚筒洗衣机瞬态脱水振动的分析与控制陈海卫 张秋菊深水锚泊线串联浮筒系统的动力特性分析乔东生 闫俊 欧进萍基于ALE方法的钛合金超声振动车削仿真路冬 黄红福 吴勇波 冷超群带加强层框架核心筒结构中单伸臂桁架刚度比的合理取值林绍明 周云 邓雪松 吴从晓艇尾实尺桨空化初始航速和高频噪声谱的工程预报杨琼方 王永生 余亮琴 张明敏基于声发射理论的阀门气体内漏量化检测研究李振林 张海峰 夏广辉意大利高速铁路Sesia大桥的动力特性及车桥耦合振动分析郭薇薇 夏禾 De Roeck Guido 网架结构动力分析的三次样条辛算法李纬华 王堉 罗恩风力发电机自适应鲁棒保性能控制器设计吴忠强 谢建平多层简单框架结构振动台模型设计何志坚 王社良地下爆炸应力波分段有限元正演技术研究严波 曾新吾用高阶梁单元计算结构附带集中质量的灵敏度王栋 马建军基于HHT方法的煤矿巷道掘进爆破地震波信号分析宗琦 汪海波 徐颖 傅菊根钢质圆柱壳在侧向局部冲击荷载下的变形及失效破坏纪冲 龙源 方向 刘强 高福银考虑内阻尼的梁结构耦合点处近场耗散功率分析郑国涛 国凤林玄武岩纤维加固震损砌体结构振动台试验研究雷真 周德源 张晖 王继兵基于均生函数周期叠加外推法的EMD端点问题的研究李钊 周晓军 徐云方口径电磁轨道发射装置导轨及壁板的动力响应何威 白象忠近断层地震方向脉冲效应对高速铁路桥梁弹塑性反应的影响陈令坤 张楠 胡超 徐庆元颗粒碰撞阻尼的时效性研究李海超 王树林 杜妍辰 李生娟 徐波 蹇敦亮 朱钰方基于分段解析法的智能弹簧隔振系统基础激励响应分析倪德 朱如鹏 鲍和云 胡正根驾驶员座椅半主动空气悬架系统振动特性实验研究朱思洪 朱星星 马然 诸葛平变长度提升系统钢丝绳纵向振动特性包继虎 张鹏 朱昌明计算多体系统动力学中引入多体系统离散时间传递矩阵法的混合算法研究高浩鹏 黄映云 赵建华 孙宇鹏基于模糊树的Hammersteinlike模型对超磁致伸缩作动器的张伟 柳萍 刘青松 张臻 毛剑琴 周克敏典型地震动作用下长周期单自由度体系地震反应分析王博 白国良 代慧娟具有弹性静子的碰摩转子轴承系统非线性动力特性研究陶海亮 潘波 高庆 谭春青 陈海生振动冲击对海水润滑塑料轴承时变热弹流润滑的影响张丽静 王优强基于EMD和分形盒维数的旋转机械耦合故障诊断方法研究韩东颖 李庚 时培明。
多自由度超声波电机应用的研究
多自由度超声波电机应用的研究【摘要】多自由度球型超声波电机是近三十年来发展起来的一种新型驱动器[1, 2],它以独特的运动方式在全方位仿生运动的球形关节以及月球登陆车等领域有着广阔的应用前景。
【关键词】超声波电机多自由度驱动器随着科学技术的快速发展,在航空、航天、导弹、汽车、机器人以及精密仪器等领域中对电机性能所提出的短、小、薄、低噪声、无电磁干扰等特殊性能的需要,尽管传统的电磁型电机在理论、设计方法和制造技术上都已经达到十分完善的程度,但由于它的工作原理和结构的局限性,目前已经很难满足这些特殊应用领域的要求。
目前在世界各国研制的各种新型电机中,压电超声波电机是发展较快、取得成果较多,最具有生命力的一种。
超声波电机是利用压电陶瓷的逆压电效应,把电能转换成弹性体的超声振动,通过摩擦偶合作用获得运动和力(矩)。
超声波电机突破了传统电机的概念,没有电磁绕组和磁路,不以电磁的相互作用来产生运动,是一种全新的原理和结构的驱动装置。
尽管超声波电机的发明和发展的历史比较短,但由于它具有传统的电磁型电机所不具备的许多优点,超声波电机已经在智能结构、光电子、航空航天、微型机械、精密仪器仪表、伺服机构、生物及遗传工程、机器人和家用电器等诸多技术领域得到成功应用[3]。
1 超声波电机概述1.1 超声波电机的定义。
超声波电机是利用压电陶瓷元件作为换能装置,它的本体是由定子和转子组成的。
它是通过压电材料的逆压电效应使交流电信号转变成定子表面质点超声频率的机械振动,借助于定、转子之间的接触产生的摩擦力,实现将定子表面质点交变的机械振动转变为转子单方向的直线运动或旋转运动。
1.2 超声波电机的特点。
超声波电机与传统的电磁型电机相比,具有如下优点:①结构简单,形式灵活多样。
可以实现电机的短、小、薄。
②速度低、转矩大(是传统电磁型电机的3~10倍)。
无需齿轮变速机构,可实现直接驱动,减少了能量损耗和传动误差。
③无磁场干扰,电磁兼容性好。
超声波电机的研究现状及应用前景

超声波电机的研究现状及应用前景摘要:超声波电机是一种通过摩擦传递弹性超声振动以获得功率的驱动机构。
压电陶瓷在高频替代电压作用下产生相反的压电效应,从而激发超声频段内弹性定子的微幅振动。
定子驱动的表面粒子的椭圆运动通过摩擦转换为转子的旋转(或线性)运动。
超声波电机具有低速大转矩、无噪声、停电后自燃、快速响应、无磁场干扰等特点。
关键词:超声波电机;压电效应;研究现状;应用前景;超声波电机是一种新型的微型专用电机。
其通过反向偶极子效应和超声振动获得动力的工作原理推翻了传统的发动机概念,吸引了国内外许多学者的广泛关注和研究。
目前,该技术仍处于科学前沿,应用前景广阔,因此具有重要的研究价值。
综述了超声波电机的研究现状及应用前景。
一、国外超声波电机的研究现状人类第一次尝试用弹性振动来获取权力始于钟表。
1961年,日本Bulova Watch公司开始出售一只手动手表,每月误差仅为1分钟,这创造了当时的世界纪录,给全世界学者留下了深刻的印象。
超声波马达的研究也已开始,许多研究人员对此进行了深入研究,并取得了丰硕成果。
提出并制造了一种驻波分电器超声波马达,该马达使用了一种波长为27.8 khz的朗格文激励器,输入功率为90瓦,机械输出功率为50瓦,输出扭矩为0.25n m,输出速度为0.25n m但是,由于振动板和发动机转子之间的接触固定在同一位置,接触表面仍存在严重的摩擦磨损问题。
为了解决摩擦磨损问题,提出并制造了另一种形式的超声波偶极电机。
这种发动机意识到转子是由行波而不是固定点和驻波力矩不断推动的。
从而大大减少定子与转子接触表面的摩擦磨损。
该发动机的工作机构是利用定子表面颗粒在圆周方向上的椭圆运动速度分量驱动转子通过摩擦转动。
佳能公司研制的环形行波超声电机已正式应用于EOS相机目标自动研制系统,标志着超声波电机开始进入实用阶段。
不难看出,上述所有超声波电机都属于接触式超声波电机,即功率是通过定子和转子之间的接触摩擦传递的。
浅谈多自由度球形超声电机研究现状
浅谈多自由度球形超声电机研究现状多自由度球形电机是电机研究领域的一个前沿课题,是近几年来发展的一种新型的多自由度超声电机,可应用在全方位仿生运动的球形关节、高性能机器人的柔性关节和机器人眼球等特殊场合。
与单自由度超声电机相比,多自由度球形超声电机在结构和测控上都为复杂,国内外的研究表明,对多自由度球形超声电机的研究和应用尚属探索性阶段。
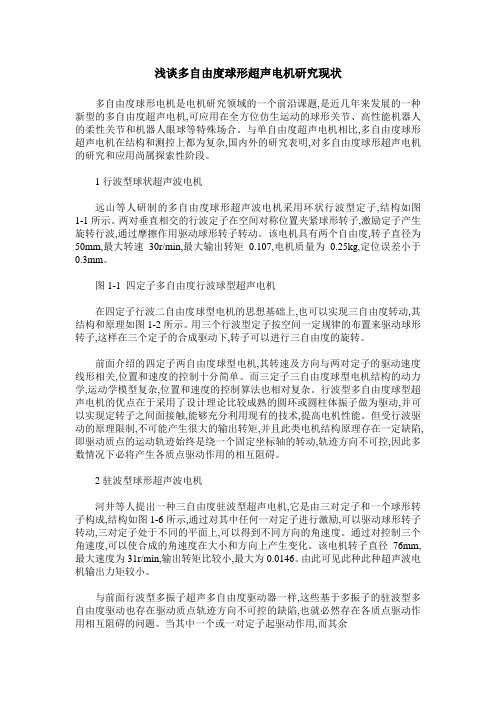
1行波型球状超声波电机远山等人研制的多自由度球形超声波电机采用环状行波型定子,结构如图1-1所示。
两对垂直相交的行波定子在空间对称位置夹紧球形转子,激励定子产生旋转行波,通过摩擦作用驱动球形转子转动。
该电机具有两个自由度,转子直径为50mm,最大转速30r/min,最大输出转矩0.107,电机质量为0.25kg,定位误差小于0.3mm。
图1-1 四定子多自由度行波球型超声电机在四定子行波二自由度球型电机的思想基础上,也可以实现三自由度转动,其结构和原理如图1-2所示。
用三个行波型定子按空间一定规律的布置来驱动球形转子,这样在三个定子的合成驱动下,转子可以进行三自由度的旋转。
前面介绍的四定子两自由度球型电机,其转速及方向与两对定子的驱动速度线形相关,位置和速度的控制十分简单。
而三定子三自由度球型电机结构的动力学,运动学模型复杂,位置和速度的控制算法也相对复杂。
行波型多自由度球型超声电机的优点在于采用了设计理论比较成熟的圆环或圆柱体振子做为驱动,并可以实现定转子之间面接触,能够充分利用现有的技术,提高电机性能。
但受行波驱动的原理限制,不可能产生很大的输出转矩,并且此类电机结构原理存在一定缺陷,即驱动质点的运动轨迹始终是绕一个固定坐标轴的转动,轨迹方向不可控,因此多数情况下必将产生各质点驱动作用的相互阻碍。
2驻波型球形超声波电机河井等人提出一种三自由度驻波型超声电机,它是由三对定子和一个球形转子构成,结构如图1-6所示,通过对其中任何一对定子进行激励,可以驱动球形转子转动,三对定子处于不同的平面上,可以得到不同方向的角速度。
2024年超声波市场发展现状

2024年超声波市场发展现状简介超声波技术是一种利用高频声波在物体中传播和反射的原理来进行测量、检测和成像的技术。
这种技术在医疗、工业、安防等领域有着广泛的应用。
本文将介绍超声波市场的发展现状。
市场规模超声波市场规模庞大,且呈现稳定增长态势。
根据市场研究机构的数据显示,2019年全球超声波市场规模达到100亿美元,并预计在2025年时将达到150亿美元。
市场规模的增长主要得益于其在医疗和工业领域的广泛应用,并且随着技术不断进步和创新,超声波市场的发展潜力巨大。
医疗领域超声波技术在医疗领域是最为广泛应用的领域之一。
其在危急诊断、手术导航、病理学研究等方面都有着重要作用。
尤其是在超声影像学领域,超声波成像技术在医学诊断中起到了重要的辅助作用。
随着医疗技术的不断发展,超声波成像技术的分辨率和灵敏度也在不断提高,进一步推动了超声波市场的发展。
工业领域在工业领域,超声波技术主要应用于无损检测和清洗工艺。
无损检测是指利用超声波在材料中传播和反射的特性来检测材料的缺陷和损伤。
这种技术被广泛应用于航空航天、汽车制造、电力设备等领域。
另外,超声波清洗技术是一种高效、环保的清洗方法,可以去除工件表面的污垢和油脂,提高工件的质量和效率。
安防领域超声波技术在安防领域也有着重要的应用。
超声波传感器可以用来检测和测量物体的距离、速度和方向,被广泛用于入侵报警、智能门禁、智能家居等领域。
超声波无线通信技术是一种安防领域的新兴技术,可以实现无线数据传输和位置跟踪,大大提高了安防设备的性能和可靠性。
发展趋势超声波技术在各个领域的应用前景广阔,并且随着技术的不断进步和创新,其市场潜力将进一步释放。
未来,超声波市场的发展可能会出现以下几个趋势:1.精细化:超声波技术将不断提高图像的分辨率和清晰度,实现更加精准的检测和成像。
2.多功能化:超声波设备将集成更多的功能和应用,满足多样化需求。
3.联网化:超声波设备将与互联网和物联网技术结合,实现远程监测和控制。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
10244多自由度超声波电机的研究现状与发展趋势郭吉丰,王剑,白洋(浙江大学电气工程学院 杭州,310027)摘要 多自由度是超声波电机研究领域的热点和难点,多自由度超声波电机适合应用于空间机构和多维驱动场合,如机器人、医疗、光学和安防等领域。
本文首先分类探讨了国内外近年来涌现的具有代表性的几类多自由度超声波电机的结构、性能及其特点;其次总结了本研究室研制的行波型球形超声波电机和直线-旋转复合型超声波电机,并阐述了球形多自由度电机的位姿控制技术;最后对多自由度超声波电机今后的发展方向提出了建议。
关键词 多自由度 超声波电机 研究现状 发展趋势 位姿控制 中图分类号 TM355引 言超声波电机利用压电材料的逆压电效应,将弹性材料的微观形变转化为宏观运动,具有低速大力矩、高功率密度、高分辨率、无电磁干扰、结构紧凑、可直驱、运动实现多样化等特点,适合在小功率场合使用,可部分代替电磁型电机,特别在航空航天、光学调焦、仪器仪表、机器人等领域得到了很好的应用[1]。
随着科技的发展,机电系统也日益复杂化,很多场合需要多自由度驱动,但是由于多自由度电磁型电机结构复杂,难于制造和实施控制,且不适合低速直驱的应用要求。
所以一些学者独辟蹊径[2],采用超声波电机的原理发展多自由度电机,由于形成的多自由度超声波电机仍具有低速大力矩、高分辨率和结构紧凑等优点,可用于机器人关节、精密装配、微小型机器人等多维机电装置,具有良好的应用前景[1]。
因此,国内外对此领域研究活跃,产生了多种原理和结构形式的电机,同时在测控技术上也有所进展。
本文首先分类探讨了近年来出现的几种多自由度超声波电机的结构、性能及特点,给出了一些具有代表性的电机实例;其次总结了本研究室在多自由度超声波电机方面的主要研究成果;最后指出了多自由度超声波电机的重点研究方向。
1 多自由度超声波电机的研究现状多自由度超声波电机可实现多个自由度的运动,具有国家自然科学基金(51107111)和中国博士后科学基金(20110491767)资助项目 机械集成度高的特点。
按照电机转子运动的输出形式,可将多自由度超声波电机分成旋转型、直线型、旋转‐直线复合型三类,如表1所示。
表1 多自由度超声波电机的分类表类型特点 典型结构 旋转型转子为球体, 两至三个旋转自由度 柱状定子‐球转子 环状定子‐球转子 球形定子‐球转子 直线型 两个平面自由度 单足/多足结构 旋转‐直线复合型一个旋转自由度 和一个平面自由度方体定子‐柱状转子1.1旋转型多自由度超声波电机旋转型是多自由度超声波电机最常见的一种结构形式。
此类电机的特点是转子为球体,可实现两至三个旋转自由度的运动。
按照定子的形状特征及与球转子接触的方式,又可以将转动型多自由度电机分为柱状定子型、环状定子型和球形定子型三类。
1.1.1 柱状定子型多自由度超声波电机柱状定子型多自由度超声波电机的典型结构为圆柱定子‐球转子,圆柱定子一般通过弯振和纵振模态的组合来驱动球转子。
这类结构最早由日本东工大的Amano 等人在1998年提出。
庆应大学的Takemura 和Maeno 在2001年提出了优化结构[3],如图1所示。
圆柱定子采用兰杰文振子结构,利用压电振子的两个正交二阶弯振模态和一个一阶纵振模态,驱动球转子产生三自由度运动。
Φ10mm 电机可实现最高转速103250r/min 和堵转转矩7mN ∙m 。
2002年该团队提出了使用神经网络的控制方法,提升电机的可靠性和稳定性[4]。
此类电机的轴向尺寸较长,定、转子之间的预紧力常采用永磁体的吸引力,故驱动力矩则较小,姿态控制也较困难。
2006年,东工大的Nakamura 等人进一步简化了柱状定子‐球转子电机的结构[5],如图2所示,采用两组压电振子,通过施加不同组合的电压激励定子的三种振动模式,进而驱动转子的三自由度运动,实现了短柱式定子。
与庆应大学电机相比,该电机结构简单、成本较低、可做到小型化,但控制相对复杂。
2011年,该电机在机器人指关节上得到应用[6]。
2007年,南航的李志荣等人采用PID 加逐点比较的控制策略,实现了电机的高精度轨迹跟踪控制[7],并讨论了定子实现弯、纵谐振频率的一致性的优化方法。
2009年,东南大学徐志科等人采用双定子夹持机构,提高了柱状定子超声波电机的输出转矩[8],双定子虽可有效夹持,但导致定子轴向长度更长。
图1 庆应大学的电机结构图2东工大的电机结构哈工大张明辉等人在2007年提出了一种方柱定子‐球转子多自由度超声波电机[9],如图3所示。
该电机定子为中空的方棱柱体,侧面粘接4片压电陶瓷,其中对角的2片互相连接。
压电陶瓷在施加电压时产生面内的伸缩和弯曲变形,从而驱动定子产生伸缩、弯曲和扭转运动。
该种电机压电振子较难出力,所以球转子输出转矩较小。
图3哈工大研制的电机1.1.2 环状定子型多自由度超声波电机环状定子型多自由度超声波电机的特点是定子呈圆环形,通过圆环的不同振动模态组合来驱动球转子输出多自由度运动。
此类型电机的结构新颖,但制造、驱动和控制等环节都比较复杂,目前成果有限。
2010年, Aoyagi 等人提出了一种夹心式结构电机[10],如图4所示。
电机使用2个对称的定子将球转子夹持在中间,新结构既增加了转子的输出力矩又减少了转子的支持机构。
研制的样机采用Φ20mm 的球转子和Φ39mm 的圆环定子,在80V 的驱动电压下,输出转矩为58.04mN ∙m 。
2011年,他们又提出了新的采用一体化的环状定子方案[11],如图5所示。
图4环状定子超声波电机I 图5环状定子超声波电机II1.1.3 球形定子型多自由度超声波电机球形定子型多自由度超声波电机的特点是定子呈半球壳型。
台湾中原大学的Ting 等人2009年提出这款电机的定子呈半球壳型,下表面安置呈十字交叉状的压电陶瓷片[12],如图6所示。
研制出定子直径为60mm 、厚度为2mm 的样机。
在施加150V 的驱动电压下,得到单自由度最大输出转速15.7r/min ,推力4.61N ;两自由度最大输出转速16.9 r/min ,推力5.08N 。
目前该电机的研究还处于起步阶段,存在损耗大、效率低的问题。
与之相比,东京农工大学Toyama 等人研制的电机则有着较高的效率和稳定性以及良好的实用价值[13],如图7所示。
采用3个环状行波定子来驱动球转子,三定子在空间上按照一定规律布置,可以实现球转子的三自由度旋转。
由于环状行波定子的可靠稳定和力能效率高,目前该电机的研究已十分成熟并已进入商业化产品阶段。
典型的结构为定子直径30mm ,转子直径40mm ,在180V 的驱动电压下,实现额定力矩40 mN ∙m ,最大力矩80mN ∙m ,最高转速250r/min 。
图6中原大学的电机结构图7东京农工大的电机结构104旋转型多自由度超声波电机普遍具有运动灵活、结构简单、体积小、驱动技术成熟等优点,但也存在球转子的速度/位置检测较复杂、输出转矩较小等问题。
目前对该类电机的研究主要集中在结构设计、速度/位置的检测和驱动控制的策略优化等方面。
1.2直线型多自由度超声波电机直线型多自由度超声波电机可以实现在平面内的二自由度运动,通常情况下是直线超声波电机技术的延伸。
目前,这种类型电机的研究和成果较少,应用较多集中在精密定位平台上。
法国学者Dembele 和Rochdi 研制出了一种三自由度直线超声波电机[14],如图8所示。
该电机由20片压电陶瓷和带有4个支撑脚的金属架组成,可以实现平面内的两自由度直线和面旋转。
实验样机尺寸为64mm×38mm×2.5mm ,支撑脚长3mm ,样机总重仅70g ,可由15V 的低电压驱动,运动精度达2.5µm 。
国内研究直线型多自由度超声波电机的机构较少,成果有限。
南航的金家楣等人提出了一种方尖塔形定子二自由度超声电机[15]。
时运来等人设计出了一种基于直线型超声电机的两自由度精密定位平台[16]。
图8 直线型多自由度超声波电机1.3 旋转-直线复合型多自由度超声波电机具有旋转和直线两种自由度的超声波电机是近年多自由度超声波电机研究领域的一个新热点。
加拿大萨斯喀彻温大学的Zhang 等人[17]于2006年提出了的电机结构中,旋转和直线运动分别由两个子电机配合完成,其结构和控制相对复杂。
东京农工大学的Mashimo 等人于2008年提出了一种新的旋转‐直线复合型电机结构[18],如图9所示。
该电机由中心开孔的正方体定子和杆状转子组成。
该电机设计巧妙,使用单一定子激发两自由度运动,可以做到小型化。
2010年研制的样机定子长度仅为3.5mm ,通孔直径仅为2.507mm ,电机转速24rad/s ,转矩2.5μN ∙m ,直线速度80mm/s ,推力2.6mN [19]。
图9 东京农工大学研制的电机旋转‐直线复合型多自由度超声波电机的研究仍处于起步阶段,转子运动的稳定性较差,输出力矩较小。
目前的研究主要集中在结构设计的改进、驱动控制的优化和速度/位置的检测等方面。
2 浙大研究室的研究成果2.1 行波型球形多自由度超声波电机自2005年起,浙江大学在国家自然科学基金和863项目的支持下,成功研制了不同种类的多自由度球形超声波电机[20‐24],如图10所示。
研制的样机均采用外缘大倾角内缘线接触的定子结构,定子的换能效率和稳定性得到了显著提高;图10(c)中提出的三定子二自由度的结构,使得结构更紧凑更可靠;图10(d)提出的利用弹性板簧来自动对心和提供预紧力的机构,使该电机易于装配和小型化。
样机采用Φ45mm 的球转子和Φ30mm 的定子,实现了堵转力矩100mN ∙m 和空转转速90r/min 。
由于超声波电机典型的非线性和机电耦合效应,通过建立基于各种机电参数的二/三自由度球形超声波电机数学模型[22‐24],为电机的优化设计提供了理论基础。
(a) 四定子两自由度球电机(十字铰结构)(b) 四定子两自由度球电机(自适应调心结构)(c) 三定子两自由度球电机 (d) 三自由度球电机105(弹性板簧)(弹性板簧)图10 行波型球形超声波电机2.2旋转-直线复合型多自由度超声波电机从新的构造机理和激励方式入手,提出了一种基于单定子的旋转‐直线两自由度超声波电机,在柱状定子上粘接具有倾斜角度的压电陶瓷,利用一阶的扭振和纵振模态来实现旋转和直线运动。
在电机驱动中采用单相电源供电和惯性冲量的控制方法驱动转子运动,通过控制输入方波的频率、占空比和幅值,可以分别实现转子运动模式的切换、运动方向的改变和运动速度的调节。
实验样机选取直径为3mm ,长度为26mm 的柱状定子,如图11所示。
采用V pp =100 V 、f =51 kHz 方波电压输入,在占空比为33%(66%)转子的逆(顺)时针运动,最大转速约为85 r/min ;采用V pp =100 V 、f =91 kHz 方波电压输入得到转子的直线运动,在占空比为33% (66%)时向内(外)侧运动,最大直线运动速度约为1.5 mm/s 。