KK飞控板安装
KK中文说明书_Rev05
KK V5.5 飞控板使用说明书免责申明:KKmulticopter V5.5飞控是一个免费的开源项目,任何版权均归属上述网站所有人所有,由此飞控引发的任何事件与本人无关,特此声明产品特点:1)Holybro所售出的成品控板均采用工厂SMD机器贴片工艺,产品质量可靠2)飞控板在烧写不同固件时,可获得不同飞行模式(单轴,2轴,4轴,6轴等),见下面示意3)本产品采用原装Atmega168PA-AU芯片和MURATA ENC-03RC 陀螺芯片,品质有保证 配置说明:您仅需为KK控板配备一套4通道比例遥控设备即可,硬件配置成本低廉。
但您在使用前必须对航模知识,尤其是直升机类航模的控制足够熟练和了解才能进行。
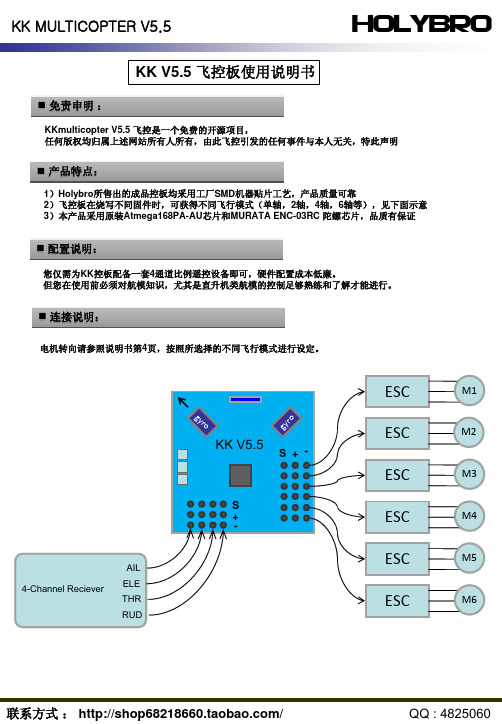
连接说明:电机转向请参照说明书第4页,按照所选择的不同飞行模式进行设定。
调试说明:以下调试说明均以韩版固件为例,德版固件电位器调节方向和韩版相反,如您使用德版固件,请勿参照如下说明。
本产品默认固件是韩版4轴‘十’字模式2.1版,初次飞行前请按如下说明校准1. 设定发射机通道正反向开关通道副翼升降舵油门方向舵JR/SPEKTRUM REVERSE REVERSE NORMAL REVERSE FUTABA NORMAL NORMAL REVERSE NORMALHITEC NORMAL REVERSE NORMAL NORMAL* 注意: 确保关闭发射机上的所有混控功能7. 使用发射机设定飞行模式-如果你的飞控不能顺利解锁,请调低几格发射机油门微调试试-普通模式:50%舵量(出厂默认解锁时为普通模式)-运动模式: 更大的舵量发应,70%舵量.-UFO模式: 更快速的方向旋转。
方向舵量90%,其他舵面50%。
-初学飞行时,建议将副翼和升降舵量设定为50%(D/R值)8. 飞行模式示例(通过刷写不同固件实现,一次刷写只能使用一种模式)。
KK飞控板安装说明

接收机与飞控之间的连接方式将飞控板上的4个通道输入插座连接至接收机,各个通道按照如下顺序对应:AIL——副翼ELE——升降舵THR——油门RUDD——方向舵◆感度调整旋钮飞控板带有3个电位器旋钮,根据不同的使用情况有两种功能:·基本设置;开机时如果某个旋钮或者全部旋钮处于最小位置(逆时针方向转到底),则会进入对应的设置项目。
·调整三个轴向陀螺仪的感度;正常使用时,逆时针方向旋转为减小感度,顺时针方向旋转为增大感度,如下图所示:左边的旋钮位置表示方向舵(YAW)感度为最小,中间的旋钮位置表示升降舵(PITCH)感度为50%,右边的旋钮位置表示副翼(ROLL)感度为最大。
每次连接新的遥控设备或者电调来使用时,都需要对飞控板做一次基本设置。
基本设置主要包含以下步骤1~4:1.设置遥控器通道的正反向;2.通道中立点校准;3.设置陀螺仪修正方向;4.油门行程校准;5.清除所有设置参数(通常无需使用此功能);6.调整陀螺仪感度;7.用遥控器设置启动模式。
1.设置遥控器通道的正反向。
CHANNEL Aileron Elevator Throttle RudderJR/SPEKTRUM REVERSE REVERSE NORMAL REVERSEFUTABA NORMAL NORMAL REVERSE NORMALHITEC NORMAL REVERSE NORMAL NORMALOthers请在遥控器上新建一组模型数据(如果遥控器有此功能的话),或者清除所有遥控器设置参数后再设置通道正反向,然后按照上表中的正反参数来调整您的遥控器,如果您的遥控器品牌不在上述表格中,那就需要通过自行测试来确定每个通道的正反状态。
请注意不要打开遥控器的任何混控功能,否则会导致输入飞控的信号不正确。
连接好所有设备后,即可开始进行如下设置。
请在确保所有设置完成前先不要安装螺旋桨,避免受伤!2.通道中立点校准。
中立点校准指的是让飞控的3个通道(除油门外)认准对应遥控器通道的中立点信号,避免因遥控器本身信号的误差导致飞行出现误动作。
kk调试说明

第一次起飞前,校准油门行程
以下情况也需要校准油门行程:
1 重新刷过固件
2 更换了电调
3 更换了飞控板
4 更换了遥控器
校准方法为:
1 将偏航电位器(yaw)的感度调整为零(根据飞控板不同,分别尝试顺时针拧到头或者逆时针拧到头)
2 打开遥控器,将遥控器微调全部居中
3 将遥控器油门摇杆打到最顶端
飞控板感度检查:
三个用于设置感度的电位器,都应该位于居中的位置(此时是百分之50的感度)
默认感度可以成功飞起来大部分飞行器,如果你需要得到更好的飞行效果,可以尝试调整感度:
增加感度,可以提高悬停的稳定性,但是当感度过高时,飞行器会开始震荡。
降低感度,可以稍微提高高速飞行时的操纵性,但是会显著降低悬停时的稳定性,增加悬停时的操纵难度。另外,当飞行器由于感度过高开始快速震荡时,尝试降低感度(感度低于25时,应该无论如何都不会发生震荡,也就是说,如果感度低于25,仍然震荡的话,应该检查下其他方面是否存在问题了)
方向(RUD)100% -也叫做偏航
升降(ELE)50% -也叫做俯仰
如果你的发射机没有设置大小舵功能,但是有调节舵机行程功能(一般不会出现这种情况),请根据需要选择两种设置中的一种: 二中设置,操作比较柔和,悬停更稳定,但是抗特大风性能不好
如果你的发射机完全没有这个功能,请继续,不设置并不会影响到飞行,只是对操作手感有影响
2.1 飞控是否正确加电
2.2 接收机到飞控板的通道是否正确设置
2.3 遥控器的mode 是否正确设置(就是咱们说的中国手,日本手,美国手)
2.4 检查遥控器上的微调,是否都已经居中
2.5 如果上面都检查完了,还是不行,请尝试先将油门通道反向,然后测试,不行的话,将油门通道恢复原先的设置(也就是再反向一次,负负得正么),然后把方向通道反向,测试下,如果仍然不行,请保持方向通道的反向的情况下,将油门通道再反一次,一般来说,rp不是太烂的情况下,总应该可以了。如果还是不行,请联系卖家,如果是自己diy的,麻烦去论坛请高人帮忙
1-kk
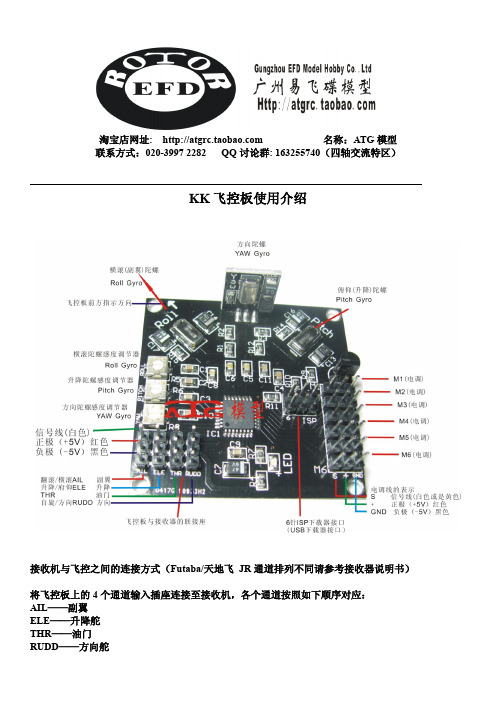
淘宝店网址: 名称:ATG模型联系方式:020-3997 2282 QQ讨论群: 163255740(四轴交流特区)KK飞控板使用介绍接收机与飞控之间的连接方式(Futaba/天地飞JR通道排列不同请参考接收器说明书)将飞控板上的4个通道输入插座连接至接收机,各个通道按照如下顺序对应:AIL——副翼ELE——升降舵THR——油门RUDD——方向舵四轴飞行架飞控板(十字或X)指向固定,各电机、电调的排列和正、反桨安装正桨:在螺旋桨的边缘有1045或者8045的字样分别为1045正桨或者8045正桨反桨:在螺旋桨的边缘有1045 R或者8045 R的字样分别为1045反桨或者8045反桨十字程式:M1-表示机头方向的电机与电调相联,各电调按方向接在飞控板M1-M4位置(请核对电调的正负极和信号线,一般黑色为负极(GDN)红色为(+) 白色为信号线(S)。
电调输出线接错正负极到飞控板会损坏电调或是飞控板。
红色箭头是指十字程式飞控板,固定在机架后飞控板上箭头指向M1轴臂方向,不同飞行程式飞控板指向安装固定不一样。
X字程式:M1-和M2表示机头方向,各电机与电调相联后电调按方向接在飞控板M1-M4位置(请核对电调的正负极和信号线,一般黑色为负极(GDN)红色为(+) 白色为信号线(S)。
电调输出线接错正负极到飞控板会损坏电调或是飞控板。
红色箭头是指X字程式的飞控板,固定在机架后飞控板上箭头指向M1和M2轴臂之间,不同飞行程式飞控板指向安装固定不一样。
电机与电调的接线(只供参考,电机与电调不同品牌有不同,请以实际使用产品说明书为准)十字程式:M 1和M 4位置(反桨)图中电机与电调线红/黄/黑对称连接十字程式:M 2和M 3位置(正桨)图中黄对黄/红/黑对换连接X字程式:M 1和M 3位置(反桨)图中电机与电调线红/黄/黑对称连接X字程式:M 2和M 4位置(正桨)图中黄对黄/红/黑对换连接每次连接新的遥控设备或者更换电机/电调来使用时,都需要对飞控板做一次基本设置。
KK多旋翼飞行控制板的调试安装
KK多旋翼飞行控制板的调试安装AIL是 翻滚/横滚/副翼ELE 是 升降/俯仰THR 是 油门RUDD 是自旋/偏航/方向飞行前的检查和调整:1.发射机油门调整1.)打开发射机和飞控电源2.)在三轴模式和四轴模式的固件中,需要解锁后才能控制飞控板!解锁步骤如下(1)遥控器油门最低,开关打开;飞控板通电,板上的LED灯闪一下熄灭,这样说明飞控板工作正常(2)日本手(右手油门)解锁:油门保持最低,把方向摇杆向右打到底,停2秒,板上的LED灯常亮,表示顺利解锁飞控板。
如果方向摇杆设置反向,则向左打到底试试(3)美国手(左手油门)解锁:油门保持最低,把方向摇杆向右下打到底,停2秒,板上的LED灯常亮,表示顺利解锁飞控板。
如果方向摇杆设置反向,则向左下打到底试试)3.)如果无法完成解锁,请将油门通道的微调往下调一点再重复解锁步骤 2.设置发射机ATV/舵机信号行程范围(实际上就是调整发射机各个通道遥控信号的脉宽)Pitch/Elevator(俯仰):50%Roll/Aileron(横滚): 50%Yaw(rudder): 100%初始化的陀螺仪感度(增益gain)是50%,增大感度会造成四轴快速振荡,快速飞行需要减小陀螺仪的感度,但过低的感度也会造成操控困难或者四轴翻倒 3.电调油门行程/范围设置(千万不能装桨,以免发生意外)1.) 将飞控板电源断开,把YAW电位器旋转到底(德版固件及韩版2.5(包含2.0、2.1、2.2、2.3、2.4)版本固件逆时针拧,韩版1.5、1.6、1.7固件顺时针拧)2.)打开发射机电源3.)发射机油门手柄推到最大(满油门)4.)打开飞控板电源5.)德版固件:飞控板LED灯会快速闪动数下后熄灭。
约2秒后,听到电机发出滴滴两声后不再发声。
韩版固件:接通飞控板电源后LED灯会快速闪动数下后熄灭,隔一会儿LED会再次快速闪动数下后熄灭。
6.)这时快速把油门拉到最低,电调会发出哔哔声来回应。
KK多旋翼飞行控制板的调试安装
KK多旋翼飞行控制板的调试安装AIL是 翻滚/横滚/副翼ELE 是 升降/俯仰THR 是 油门RUDD 是自旋/偏航/方向飞行前的检查和调整:1.发射机油门调整1.)打开发射机和飞控电源2.)在三轴模式和四轴模式的固件中,需要解锁后才能控制飞控板!解锁步骤如下(1)遥控器油门最低,开关打开;飞控板通电,板上的LED灯闪一下熄灭,这样说明飞控板工作正常(2)日本手(右手油门)解锁:油门保持最低,把方向摇杆向右打到底,停2秒,板上的LED灯常亮,表示顺利解锁飞控板。
如果方向摇杆设置反向,则向左打到底试试(3)美国手(左手油门)解锁:油门保持最低,把方向摇杆向右下打到底,停2秒,板上的LED灯常亮,表示顺利解锁飞控板。
如果方向摇杆设置反向,则向左下打到底试试)3.)如果无法完成解锁,请将油门通道的微调往下调一点再重复解锁步骤 2.设置发射机ATV/舵机信号行程范围(实际上就是调整发射机各个通道遥控信号的脉宽)Pitch/Elevator(俯仰):50%Roll/Aileron(横滚): 50%Yaw(rudder): 100%初始化的陀螺仪感度(增益gain)是50%,增大感度会造成四轴快速振荡,快速飞行需要减小陀螺仪的感度,但过低的感度也会造成操控困难或者四轴翻倒 3.电调油门行程/范围设置(千万不能装桨,以免发生意外)1.) 将飞控板电源断开,把YAW电位器旋转到底(德版固件及韩版2.5(包含2.0、2.1、2.2、2.3、2.4)版本固件逆时针拧,韩版1.5、1.6、1.7固件顺时针拧)2.)打开发射机电源3.)发射机油门手柄推到最大(满油门)4.)打开飞控板电源5.)德版固件:飞控板LED灯会快速闪动数下后熄灭。
约2秒后,听到电机发出滴滴两声后不再发声。
韩版固件:接通飞控板电源后LED灯会快速闪动数下后熄灭,隔一会儿LED会再次快速闪动数下后熄灭。
6.)这时快速把油门拉到最低,电调会发出哔哔声来回应。
“KK”飞控板系列飞行器的制作

“KK”飞控板系列飞行器的制作作者:一也来源:《航空模型》2011年第09期“KK”飞控板是一款开源的飞行控制模块,其对硬件要求低、价格相对便宜,虽然功能有限,却受到越来越多模友的关注。
笔者此前曾以“MK”飞控板为控制单元制作过一款四轴飞行器(参阅《航空模型》2010年第9期《一款四轴飞行器的制作》一文),看到最近网上流行采用“KK”飞控板的四轴飞行器,于是也决定用它制作一组。
掌握了“KK”飞控板的功能后,笔者将它与以前使用的“MK”飞控板做了比较。
由于“MK”飞控板用加速度计和陀螺仪测量四轴飞行器的姿态,而“KK”飞控板只用陀螺仪进行姿态增稳,因此前者在飞行控制上更加稳定;在硬件支持上,“KK”飞控板要求更低,以电调为例,“MK”飞控板只支持IIC数字接口的专用高速电调,“KK”飞控板则能支持市面上常用的普通电调。
与“MK”飞控板相比,“KK”飞控板的主要优点有:1.价格低廉,结构简单,维修、调试容易;2.飞控板载3个陀螺,可用电位器调整陀螺感度;3.全舵机信号输出,支持普通商品电调与模拟舵机;4.通过不同的结构布局与相应的调试程序,能支持三轴、四轴、六轴等多种飞行模式(其中,四轴有“+”和“×”等飞行模式,六轴有“Hex6”和“Y6”等飞行模式,图1~图5);5.可与接收机直接连接,而不用像“MK”飞控板那样另配PPM解码板;6.以其为控制单元制作的飞行器,其操控方式类似单旋翼模型直升机,主要依靠手工操控,飞行器可做空翻、“刷锅”等特技动作。
下面为大家介绍笔者以“KK”飞控板为控制单元制作的三轴与四轴飞行器,以三轴飞行器的制作与调试为主。
一、制作机架两款飞行器的机架都设计成可折叠式,便于携带。
机架的主要零件以市面上常用的一些材料为主,购买容易、价格低廉、加工方便。
四轴飞行器为“×”结构布局,使用4个无刷电机和4个电调。
具体制作过程如图6~图12所示。
三轴飞行器机架的制作与四轴飞行器基本类似,唯一不同的是:因三轴飞行器为“Y”形结构(图13、图14),其控制方式与四轴飞行器有所区别。
就我拥有的四轴飞控做一个比较(KK、MWC、玉兔、FF)

就我拥有的四轴飞控做⼀个⽐较(KK、MWC、⽟兔、FF)我之前从未飞过直机,先后飞过的四轴飞控有KK、⽼乔牌MWC、⽟兔、FF,现在就这四款飞控作⼀下个⼈的使⽤测评。
KK是我⼊门四轴的第⼀块飞控,可以这么说,⾃从MR将KK的暴利打成了原形,才有了今天多旋翼的如此流⾏。
我先后⼀共拥有过六块KK,第⼀块KK是168元买的散件,后来承蒙某商家搞活动,送了我5⽚KK的PCB空板,我⾃购元件,焊出了五板:em00: 。
KK的使⽤确实⽐较简单,调试也⾮常简便,这才让我对四轴彻底的⼊了迷,但KK由于没有⾃稳功能,导致了多次在飞远后或有风天因为看不清姿态⽽炸机收场。
初飞KK时,我创下了⼀块电池的飞⾏内炸了⼋⽀桨的纪录,⼀个星期炸了100元的时候的1045正反桨还很贵,⼀⽀5块5,炸起来真是⾁痛:em17: 。
后来⼊了LAMA桨,炸桨再也不⼼痛了。
还引领了⼀次LAMA桨的风潮,导致淘宝上的某商家⼀天销售LAMA桨数千⽀的热潮:em15:的总结是:便宜、调试简单、升级固件⽅便、⽀持单轴到N轴的飞⾏模式,但功能⽐较少,是带领⼴⼤模友⼊门四轴的功⾂。
并且始终感觉KK是练技术的第⼀选择。
对KK的总结后来⼊⼿了⽼乔的MWC飞控,第⼀次体会到了⾃稳的乐趣,只要⼀松杆,飞机马上就能恢复到⽔平状态,感觉真是太爽了,也体会到了罗盘的作⽤,只要罗盘⼀开,⽅向就能锁得死死的,但⽓压定⾼,感觉从来没有⽣效过,感觉应该是定⾼的算不过MWC的调试确实很难,有时候不怎么调,都能好飞得不得了,有时候却会很难飞,所幸的是,⽼乔的售后做的⾮常好,经常半夜帮我远程调机,并且⽼乔也有详细的教程。
但估计由于MWC的作者是国外的,有时很难正确理解到MWC原作者件的PID也没有⼀个很好的理解,我们的意见也⽆法得到作者的⽀持。
后来MWC也有了CF功能,由于我的飞控寄回给⽼乔升级了,现在新的机架还没有,⼀直没有真正的体会过。
对MWC总结总结:调试⽐较⿇烦,调试好了,⾮常好飞;英⽂好的模友,可以看看官⽹,可能会有⽐较⼤的收获;⽓压定⾼效果⼀般;⽼乔的服务很好;那份教程是⽬前见过最详细的。
KK002 快速安装指南说明书
4
6. Instructions for the icons and buttons on live video page: Pan/tilt control Slither the video to pan or tilt the camera
Allows User to listen to the camera's audio feed and talk to the camera. Take snapshots and record video files.
720P Version 1.0.2 EN
HD
IP Camera KK002
Quick Start Guide
Shenzhen Keekoonvision Technology Co., Ltd
Table of Contents
What’s In the Box.................................................................... 1 Get Started.................................................................................... 1 Hardware Installation.................................................................. 2 For Mobile Device....................................................................... 3 Set Up Camera............................................................................. 6 View in Windows Web Browser.............................................. 8 View in Windows CMS Software.............................................. 11 FAQ......................................................................................nge the speed of the pan/tilt of the camera. There Pan/Tilt Speed are 5 options: Fastest, Fast, Normal, Slower and Slowest.
KK_C 使用说明v1.0

2. 基本功能(KK 标准功能)
� 三轴陀螺仪稳定系统 � 支持正反向陀螺仪芯片 � 支持电调油门行程校准 � 支持十字模式和 X 模式安装 � 支持锁定保护功能
3. 改进功能(KK_C 特有功能)
� 开机等待遥控器信号功能(保障使用安全) � 飞行器模式选择功能(免烧固件)
KK_C 让你的 KK 飞控增值 10 倍 可能是目前最好的 KK 固件 galemx@ 1
打开遥控器,给飞行器上电,飞控的 LED 闪烁数秒后熄灭 将四轴飞行器放置在起飞位置(最好是水平地面) ,离开飞行器数米,面对飞 行器 将方向摇杆打至最右侧并保持 1 秒,飞控的 LED 闪烁 1 秒后保持常亮,表示 机身已经解锁(闪烁过程为陀螺仪基准建立过程) 。 推油门至螺旋桨旋转,继续推油门至飞行器起飞 飞行需要结束时,缓慢收油门直至飞行器着陆 然后将油门拉至最低,接着将方向摇杆打至最左侧并保持 1 秒,飞控的 LED 熄灭,表示机身已经锁定 将飞行器的电池卸下,一次飞行结束
5) 若进行了遥控器通道反向设置,重复第 1~4 步,直至三个维度的机身反应都正确。
7. 标准飞行流程
在陀螺仪方向和摇杆方向都确认是正确的之后,您可以开始进行试飞,试飞时应将 电池充足电,在一个有足够空间的地方飞行,注意现场尽量不要有物品和观众。 确认环境安全后,按如下步骤进行飞行操作:
上电 就位 解锁 起飞 着陆 锁定 下电
6.2 确认摇杆正反向
1) 2) 打开发射机,将油门杆拉至最低; 零点,给飞控上电,飞控的 LED 闪烁数秒后熄灭;将方向舵打至 将飞控的三个电位器都调至 调至零
可能是目前最好的 KK 固件 galemx@ 3
KK_C 让你的 KK 飞控增值 10 倍
KK_C 四轴飞行器固件使用说明书
Pixhawk飞控快速使用指南
版本时间说明修订者V0.22014-12-16起草目录王成波快速使用指南零部件1附带SD卡的Pixhawk7电源模块2蜂鸣器8I²C分配器模块4SD卡USB适配器9四接口I²C分配器连接线5USB连接线10三线制伺服连接线6六线制连接线x211泡沫双面黏胶准备开始在APM固件的帮助下,Pixhawk能将任1安装何遥控飞机、直升机或者车辆变成多功能2连接私人飞机。
只要你有组装好的完整框架,3下载固件就可以遵照下面的指南安装Pixhawk。
4校正安装使用提供的泡沫双面胶将Pixhawk安装在飞机重心位置上。
注意确保Pixhawk上的箭头指向飞机前方。
将方形泡沫双面胶黏贴在飞控板的四个角上飞机正面购买在购买3DR整机框架和电子套件连接(要求)连接蜂鸣器和安全开关(可选项)使用3DR数传套件(要求)连接3DR GPS和罗盘,以提供飞机的飞行定位数里的六线制连接线将3DR无线据。
使用套件里提供的六线制连接线将罗盘连接到GPS接接收器连接到Pixhawk上的TE-口上;用四线制连接线,将MAG连接到I²C接口上。
LEM接口。
实现数据接收并与飞机进行实时交流。
(要求)使用6线制连接线将3DR电源模块连接到POWER接口上,利用锂聚合物(LiPo)电池直接向飞行器供电。
(可选项)I²C分配器扩展了I²C接口,使PiXhawk能连接多达四种的外设。
使用四线制连接线将分配器连接到Pixhawk上,并把罗盘模块、外部LED、数字空速传感器和其它外设添加到你的机架上。
了解更多在/learn了解LiPo电池及其供电机制。
连接无线控制模块PPM RC接收器使用三线制伺服连接线,将RC接口的三个管脚分别连接到地(—)、电源(+)和信号(S)。
FUTABA S.BUS接收器使用三线制伺服连接线,将RC接口的三个管脚分别连接到地(—)、电源(+)和信号(S)。
SPECTRUM卫星接收器PWM接收器在购买PPM解码器模块,将PWM RC接收器连接到Pixhawk上。
KK飞控操作手册

KK飞控操作手册一、简介KK飞控是一种常见的无人机飞控器件,具有稳定飞行、精确控制等特点。
本操作手册旨在帮助用户了解KK飞控的基本操作和功能,以便正确使用和享受飞行乐趣。
二、硬件连接1. 连接飞行控制板和调谐器:将飞行控制板的信号线和电源线分别连接到调谐器上的对应接口。
2. 连接电机和调谐器:将电机的三根线分别连接到调谐器上的对应输出接口。
3. 连接电子速度控制器(ESC)和调谐器:将ESC的信号线和电源线分别连接到调谐器上的对应接口。
三、软件设置1. 安装KK飞控软件:将KK飞控软件安装至计算机,并根据提示进行正确安装。
2. 连接飞控板和计算机:使用USB数据线将飞控板与计算机相连接。
3. 打开KK飞控软件:运行软件并选择适当的飞行控制器型号。
4. 配置飞行器参数:根据飞行器类型和配置进行参数设置,如飞行器尺寸、电机布局等。
5. 调校飞行器:进行飞行器的加速度计、陀螺仪和遥控器的校准,确保准确的控制。
四、基本操作1. 上电与解锁:将电池连接至飞行器,等待飞控指示灯稳定后进行解锁操作,通常为将遥控器的油门推至最低并快速拉回至最高位置。
2. 起飞与降落:推动遥控器的油门向上控制飞行器起飞,向下控制飞行器降落。
3. 悬停与平稳飞行:通过微调油门,使飞行器能在空中悬停或平稳飞行。
4. 转弯与旋转:通过左右摇杆控制飞行器的转弯和旋转。
5. 着陆与关闭:将飞行器安全着陆后,及时关闭电源以保护电池和飞行器。
五、高级功能1. GPS导航:安装GPS模块并进行相应设置,可实现飞行器的导航功能,包括定位、航线飞行等。
2. 高度保持:设置飞行器的高度保持功能,可使其在飞行过程中保持恒定的飞行高度。
3. 航向保持:通过设置飞行器的航向保持功能,可使其根据设定的方向自动调整飞行方向。
4. 跟随模式:选择跟随模式后,飞行器将自动跟随遥控器或者其他指定的对象进行飞行。
5. 动作表演:KK飞控还具备各种预先设定的飞行动作表演功能,可根据用户需求进行设定和操控。
KK推出新版飞控及GPS导航板

HeliBEST Library - KK推出新版飞控及GPS导航板
KK推出新版飞控及GPS导航板
* 本文智慧产权归原作者所有,请尊重作者的劳动付出,转载需经原作者同意并注明出处 * 作者: HeliBEST
HeliBEST讯:近日,韩国KK Multicopter的新版飞控(FlyCam Blackboard)及GPS导航板(FlyCam NaviBoard)正陆续向预订客户发货。新版飞控除将电路板改为黑色以示与旧版区别,其性能也跃入新台阶。最重要 的改变是采用MEMS(2轴+1轴)三轴陀螺,拥有比上一代飞控更佳的灵敏度和响应精度。马达及舵机输出端口,由 上一代的6个,扩展到了12个。除支持原有布局模式外,还支持:Butterfly、Octo、X8、Y6T、TwinQuad、 TwinHexa、Dodeca等新型的模式,可谓兼容性达到了前所未有的高度。FlyCam Blackboard还提供了一个 Debug Port,这个端口连接“地面站”的通道,使用Xbee或其它数传电台,即可用此通道与电脑软件进行实时通讯!
/rc/vh-viewarticle.asp?id=918(第 1/4 页)2011-09-21 15:25:02
HeliBEST Library - KK推出新版飞控及GPS导航板
FlyCam Blackboard和FlyCam NaviBoard秉承了KK飞控一惯良好的易用特性,所有参数均无须连接电脑进行设 定,依靠电路板上的旋钮即可完成。FlyCam Blackboard和FlyCam NaviBoard的固件都是可以升级的,您只需要 在官方网站下载固件,就可以获得不断的更新,令其性能日趋势完善。
- 即插即飞 - 兼容标准PWM电调 - 易于设定(不依赖于电脑或其它设备) 重量:11.5g FlyCam NaviBoard的主要特性: - 三轴MEMS陀螺 + 加速度传感器 - GPS位置锁定和回家功能(U-Blox 6) - 电子罗盘 - 气压高度计 - 双轴云台增稳(俯仰、滚转) - 兼容各代kkMultiCopter飞控板 - 兼容各种接收机,提供多达9个输入通道 - 易于设定(不依赖于电脑或其它设备) - 可升级新固件 - 即插即飞 - 可选装超声波模块、FlyCam OSD模块 重量:22g(含GPS模块) FlyCam NaviBoard输入接口定义: 1-AIL 2-ELE 3-THR 4-RUD 5-气压定高(2位开关控制,ON / OFF) 6-GPS(3位开关控制,OFF / 锁定 / 回家) 7-Tilt Servo 8-Roll Servo 9-回家模式选择(2位开关控制,机头固定 / 机头对准回家的方向)
KK飞塔KKT20系列说明书

KKT20-F405 & KKT20-F411KKT飞塔新命名:KKT16安装尺寸16*16mm,KKT20安装尺寸20*20mm,KKT30安装尺寸30.5*30.5mm 注:飞塔安装时根据碳板厚度选择是否使用“O”型减震圈选择正确接收机协议KKT20-B1KKT20-B2KKT20-B3KKT20-B4KKT20-F405KKT20-F411KKT20-E12A KKT20-E20A KKT20-V200旧名称:KK飞塔(两层)20A 旧名称:KK飞塔(三层)20A 旧名称:飞塔20*20 V2旧名称:F4+OSD(KK飞塔配件)旧名称:F411+OSD(KK飞塔配件)旧名称:电调12A(KK飞塔配件)旧名称:电调20A(KK飞塔配件)旧名称:图传(KK飞塔配件)KKT20-F405T6R6B U Z Z E R -G N DL E D S T R I P 5V (B U Z Z E R +)U 1T X P W M 5U 1R X +5V G N D CAM 5VGND VIDEO AUDIO VCCGND SIGNAL AUDIO 5V G N DS VIDEO include OSD signal output此接口用于使用两层飞塔时,外接图传。
使用三层飞塔时不需要连接!55VGNDG T1R1R C I N 3V 3SPEK(DSMX)GND 3.3V SINSBUS PPM SIN 5VGNDBETAFLIGHTUSBKKT20系列飞塔说明A V T3T3S.BUSDSM2/DSMXV DV 3选择正确接收机协议BUZZER-GNDLED STRIP 5V(BUZZER+)CAM5VGND VIDEO AUDIO VCCGND SIGNAL AUDIO 5V GNDPPM+RX2-INV3V3TX2VIDEOBATTERY+RX25V GND TX2-INV RX2-INV CURRENT PWM4GND PWM3GNDPWM2GND PWM1BATTERY+BATTERY+GND 5V RX1TX1BETAFLIGHTUSBGND TX1GND VIDEOGND AUDIOGNDBATTERY+BATTERY+KKT20-F411S.BUSDSM2/DSMXPPMCH1CH2CH3CH4CH5CH6CH7CH8586558455825580557855765574557255733575257715790580958285847586657055685566556455885590559255945574053625658576054005695578054365732580054735769582055105806584055475843586055845880588056205917Band A Band B Band E Band F Band H Band R1.蓝色为频道(CH)指示灯,闪烁1~8次指示CH1~8;绿色频组指示灯(BD),闪烁1~6次指示BAND-A~F;红色为功率指示灯(PW),闪烁1~3次,指示25mW/100mW/200mW三档发射功率。
MWC飞控组装调试说明
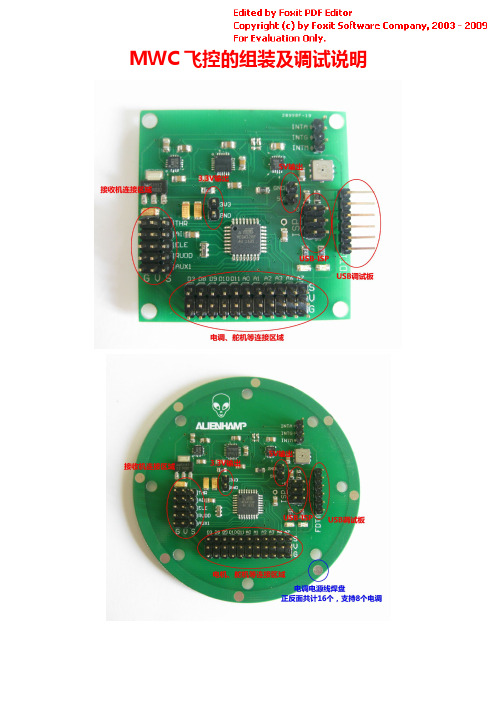
MWC飞控的组装及调试说明第一章:硬件的连接1.电机旋转方向及电机与飞控之间的连接红色箭头的方向是飞控安装的方向,箭头永远指向四轴的正前方!!!电机和电调,按照对应的数字连接到飞控上蓝色箭头所指区域以四轴模式为例:四轴十字模式”前电机,顺时针转, 使用反桨(1045R等带R的桨)连接到D3后电机,顺时针转, 使用反桨(1045R等带R的桨)连接到D9左电机,逆时针转, 使用正桨(1045等不带R的桨)连接到D11右电机,逆时针转, 使用正桨(1045等不带R的桨)连接到D10四轴X模式:左前方电机,顺时针转, 使用反桨(1045R等带R的桨)连接到D3右前方电机,逆时针转, 使用正桨(1045等不带R的桨)连接到D10左后方电机,逆时针转, 使用正桨(1045等不带R的桨)连接到D11右后方电机,顺时针转, 使用反桨(1045R等带R的桨)连接到D9其他模式请参考下面的图片进行连接2.接收机与飞控之间的连接接收机通过双头3P杜邦线连接至飞控板上橙色箭头所指区域THR:对应接收机上的油门(3通道)AIL: 对应接收机上的副翼或者叫横滚(1通道)ELE:对应接收机上的俯仰或者叫升降(2通道)RUDD:对应接收机上的航向或者叫自旋(4通道)AUX1:对应接收机上的5通道(也可接遥控器上的空余通道),用于自定义飞控的各种模式,如气压定高,自稳等等的开启和关闭。
注:不同品牌的遥控器和接收机通道顺序可能会不一样,连接过程中请按接收机的实际顺序连接。
B转串口调试板和飞控之间的连接:飞控上黑色箭头和USB调试板黑色箭头之间用双头6P杜邦线连接(注意飞控板反面及调试板正面的文字标识,不要插反了)调试板上墨绿色箭头所指区域通过USB转MINI USB线连接电脑第二章:飞控固件的烧写1.先将飞控-调试板-电脑按第一章中的方法全部连接好2.打开固件烧写软件固件烧写软件下载地址:/files/arduino-0022.zipUSB调试板的驱动也在arduino-0022.zip包里。
四旋翼飞行器基本知识(四旋翼飞行器结构和原理+四轴飞行diy全套入门教程)

四旋翼飞行器基本知识(四旋翼飞行器结构和原理+四轴飞行diy全套入门教程)1.结构形式旋翼对称分布在机体的前后、左右四个方向,四个旋翼处于同一高度平面,且四个旋翼的结构和半径都相同,四个电机对称的安装在飞行器的支架端,支架中间空间安放飞行控制计算机和外部设备。
结构形式如图 1.1所示。
.工作原理四旋翼飞行器通过调节四个电机转速来改变旋翼转速,实现升力的变化,从而控制飞行器的姿态和位置。
四旋翼飞行器是一种六自由度的垂直升降机,但只有四个输入力,同时却有六个状态输出,所以它又是一种欠驱动系统。
四旋翼飞行器的电机 1和电机 3逆时针旋转的同时,电机 2和电机4顺时针旋转,因此当飞行器平衡飞行时,陀螺效应和空气动力扭矩效应均被抵消。
在上图中,电机 1和电机 3作逆时针旋转,电机 2和电机 4作顺时针旋转,规定沿x轴正方向运动称为向前运动,箭头在旋翼的运动平面上方表示此电机转速提高,在下方表示此电机转速下降。
(1)垂直运动:同时增加四个电机的输出功率,旋翼转速增加使得总的拉力增大,当总拉力足以克服整机的重量时,四旋翼飞行器便离地垂直上升;反之,同时减小四个电机的输出功率,四旋翼飞行器则垂直下降,直至平衡落地,实现了沿z轴的垂直运动。
当外界扰动量为零时,在旋翼产生的升力等于飞行器的自重时,飞行器便保持悬停状态。
(2)俯仰运动:在图(b)中,电机 1的转速上升,电机 3 的转速下降(改变量大小应相等),电机2、电机4 的转速保持不变。
由于旋翼1 的升力上升,旋翼3 的升力下降,产生的不平衡力矩使机身绕 y 轴旋转,同理,当电机 1 的转速下降,电机 3的转速上升,机身便绕y轴向另一个方向旋转,实现飞行器的俯仰运动。
(3)滚转运动:与图b 的原理相同,在图c 中,改变电机2和电机 4的转速,保持电机1和电机 3的转速不变,则可使机身绕 x 轴旋转(正向和反向),实现飞行器的滚转运动。
(4)偏航运动:旋翼转动过程中由于空气阻力作用会形成与转动方向相反的反扭矩,为了克服反扭矩影响,可使四个旋翼中的两个正转,两个反转,且对角线上的各个旋翼转动方向相同。
飞控硬件连接方法(待更新)

飞控硬件连接方法
一、接收机和飞控连接
最多支持10通道输入
四个基本通道,油门,副翼,方向,升降。
四个辅助通道,默认5通道为模式选择通道,6和7通道作用可在地面站调节,六通道一般用旋钮通道,用做飞行中调节PID.七通道一般用来开关CF之类似的功能。
二个云台控制通道,分别控制云台的左右和前后翻滚。
如图,上方为控制输入
从左到右分别为:油门,副翼,升降,方向,辅助1,2,3,4 然后是云台的左右和前后翻滚控制。
二、电调和飞控连接,上图为例,左边从上到下是电调输出通道。
序号为
5,2,3,6,7,8,11,12 再往下两个是ISP接口,成品板这个接口用不上。
三、四个串口的功能,上面最左边四线接口为串口2.用作接GPS。
注意接口电压为5V。
右边从上到下为COM3,用作接数传,COM1,用作接OSD,左下角为串口0.为FTDI接口,只作上传固件和调参使用。
三.电压检测接口。
右边下面的两针接口。
用作电压检测输入,目前未测试。
留有一个10k 电阻位分压用。
以支持不同电压值。
四,传感器i2c接口,右下角四针。
五,云台舵机接口,下面中间三排针,分别是云台的左右和前后翻滚,还有个快门控制。
注意,舵机最好是单独供电,因为主控上有500毫安保险丝。
三个舵机的工作电流很有可能超过500毫安。
此时保险开,如果在空中发生这种情况。
让神保佑你吧。
炸鸡没商量
电机的安装顺序图示
传感器等板子出来后再加更新。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
接收机与飞控之间的连接方式
将飞控板上的4个通道输入插座连接至接收机,各个通道按照如下顺序对应:
AIL——副翼
ELE——升降舵
THR——油门
RUDD——方向舵
◆感度调整旋钮
飞控板带有3个电位器旋钮,根据不同的使用情况有两种功能:
·基本设置;
开机时如果某个旋钮或者全部旋钮处于最小位置(逆时针方向转到底),则会进入对应的设置项目。
·调整三个轴向陀螺仪的感度;
正常使用时,逆时针方向旋转为减小感度,顺时针方向旋转为增大感度,如下图所示:左边的旋钮位置表示方向舵(YAW)感度为最小,中间的旋钮位置表示升降舵(PITCH)感度为50%,右边的旋钮位置表示副翼(ROLL)感度为最大。
每次连接新的遥控设备或者电调来使用时,都需要对飞控板做一次基本设置。
基本设置主要包含以下步骤1~4:
1.设置遥控器通道的正反向;
2.通道中立点校准;
3.设置陀螺仪修正方向;
4.油门行程校准;
5.清除所有设置参数(通常无需使用此功能);
6.调整陀螺仪感度;
7.用遥控器设置启动模式。
1.
请在遥控器上新建一组模型数据(如果遥控器有此功能的话),或者清除所有遥控器设置参数后再设置通道正反向,然后按照上表中的正反参数来调整您的遥控器,如果您的遥控器品牌不在上述表格中,那就需要通过自行测试来确定每个通道的正反状态。
请注意不要打开遥控器的任何混控功能,否则会导致输入飞控的信号不正确。
连接好所有设备后,即可开始进行如下设置。
请在确保所有设置完成前先不要安装螺旋桨,避免受伤!
2.通道中立点校准。
中立点校准指的是让飞控的3个通道(除油门外)认准对应遥控器通道的中立点信号,避免因遥控器本身信号的误差导致飞行出现误动作。
-将PITCH旋钮调整到0位置(逆时针旋转):
-把遥控器的所有微调调整到中间位置;
-系统通电;
-等待飞控LED快闪3次,表示进入中立点校准功能;
-确认接收机正常收到遥控器信号后继续等待几秒钟;
-等待飞控LED慢闪1次,表示识别并保存中立点信号;
-信号中立点校准完成,断电并把PITCH旋钮调整到正常位置(一般是中点附近)。
3.设置陀螺仪修正方向。
陀螺仪修正方向指的是飞控在三个轴向上对机体倾斜的方向进行角度判断而做出的反动作修正,所以修正可能会存在正误情况,例如机体在飞行过程中,如果突然围绕z轴向左自旋,那么正确的自行修正方向应该是向右,而不是继续向左。
修正方向针对副翼、升降舵和方向舵三个通道,每个通道可以独立设置正反修正,默认情况下,三个通道都为正向修正。
-将ROLL旋钮调整到0位置(逆时针旋转):
-系统通电;
-等待飞控LED快闪3次,表示进入陀螺仪修正方向调整功能;
-设置陀螺仪修正方向,把对应通道的摇杆拨到左边或者上面位置,表示正向修正,拨到右边或者下面位置,表示反向修正,当任意方向拨动摇杆时,飞控LED会常亮,摇杆回到中间时,LED会熄灭;
-设置完成,断电并把ROLL旋钮调整到正常位置(一般是中点附近)。
4.油门行程校准。
油门行程校准很重要,处理好这个步骤可以确保电机运转的一致性较好而不是出现误动作,所以请注意,不要使用无法设置油门行程的电调!
请先把电调设置项目中的“电池类型”调整成“镍氢/镍镉”而不是“锂电”
-将YAW旋钮调整到0位置(逆时针旋转):
-把油门摇杆推到最高位置;
-系统通电;
-等待飞控LED快闪3次,表示进入油门行程校准功能;
-确认接收机正常收到遥控器信号后继续等待几秒钟;
-等待飞控LED快闪3次(开始校准)(仅限于V1.6固件及后续版本);
-等待电调确认好油门最高点信号(请根据电调说明书听电机提示音);
-把油门摇杆推到最低位置;
-等待电调确认好油门最低点信号;
-设置完成,断电并把YAW旋钮调整到正常位置(一般是中点附近)。
5. 清除所有设置参数
此功能用于复位飞控,恢复所有参数为默认值(与重新刷写固件后的情况一致)。
-将三个旋钮都调整到0位置(逆时针旋转):
-系统通电;
-等待几秒钟;
-复位完成,断电并把三个旋钮调整到正常位置(一般是中点附近)。
6.调整陀螺仪感度;
-增大感度:对应的旋钮顺时针旋转;
-减小感度:对应的旋钮逆时针旋转;
-初始陀螺仪感度值为50%;
-飞行时,可以逐渐增大感度,当机体开始出现快速摆动,就稍微减小一点感度,直到可以稳定即可;
-如果感度太低,机体对摇杆动作的反应就会变得较为迟缓。
7.用遥控器设置启动模式。
-系统通电后,必须使用特定的摇杆动作来启动,直到LED常亮后飞控才能正常工作;
-正常情况下应按照如下动作启动飞控:
-油门置于最低点,方向舵置于最右边;
-等待大约1秒钟,LED就会常亮,这时即可开始飞行。
-如果启动失败,请尝试以下几种方法:
-把油门微调往下调整;
-检查油门及方向舵通道的正反向是否正确无误。
-以下是启动/陀螺仪校准模式的摇杆动作图:
左边两列为右手油门遥控器对应的动作(Mode1);
右边两列为左手油门遥控器对应的动作(Mode2);
不同飞行模式的区别:
-普通模式(Normail Mode):灵敏度为50%,适合悬停及小动作飞行;
-固定翼模式(Acro Mode):灵敏度70%,适合航线飞行;
-UFO模式(UFO Mode):方向舵灵敏度为90%,其他通道为50%;。