一款全桥逆变单极性的SPWM控制方式过零点振荡
单极性倍频spwm原理_单极性倍频SPWM调制的逆变电源系统详解

单极性倍频spwm原理_单极性倍频SPWM调制的逆变电源系统详解随着电力电子技术的发展,人们对逆变电源的要求也越来越高。
在大功率逆变电源场合,流过主电路上的器件电流非常大,作为开关管的IGBT 上流过的电流可达几百安,所以一般所选的开关管容量比较大,这就导致调制时的开关频率不能过高。
本文首先介绍了主电路与三环控制,其次介绍了单极性倍频SPWM调制,最后阐述了系统实验分析wNN,具体的跟随小编一起来了解一下。
一、主电路与三环控制逆变器主电路结构如图1所示,主电路采用全桥结构,输出端连接了LC 滤波器滤除高次谐波。
开关管的驱动信号由三角波和正弦波比较匹配得到。
三环控制结构图如图2所示,由内到外分别为瞬时值电容电流环、瞬时值电压环和电压有效值环。
其中:瞬时值电流环的主要作用是校正输出电压波形;瞬时值电压环主要作用是校正输出电压的相位,并提高系统的动态性能;电压有效值环的主要作用是使输出电压稳定在所需要的电压幅值。
电流瞬时值内环和电压瞬时值外环均采用P调节器,最外环电压有效值环采用PI 调节器。
图3和图4 分别为采用三环控制的逆变电源系统从满载到空载和空载到满载的波形仿真图,图3中Uo为输出电流。
由图3-4 可知,切载时电压幅值基本保持不变,说明系统具有较好的动态特性。
在常规SPMW波调制中,开关频率和输出脉冲频率是相等的,但是在大功率条件下,开关频率不能过高,原因主要:
①开关频率过高会导致开关损耗增大;
②会使开关管发热严重,长时间运行会损坏开关器件;
③开关频率过高,出现擎住效应的几率增大;
④大容量开关器件高速通断,会产生很高的电压尖峰,有可能造成开关管或其他元件被击。
基于单极性SPWM控制的并网逆变器的研究
定稿日期:2010-06-25作者简介:孙继健(1985-),女,河北廊坊人,硕士研究生,研究方向为新能源并网技术。
1引言逆变器做为太阳能电池阵列与交流配电系统间进行能量变换的中间环节,其安全性、可靠性、逆变效率、制造成本等因素,对光伏发电系统的整体经济效益具有重要作用[1]。
因此,高质量逆变电源已成为电源技术的重要研究对象。
逆变器中最成熟的全桥逆变器,其控制方式分为双极性和单极性两种,与前者比较,后者具有损耗低、电磁干扰小、开关谐波小等优点[2]。
由于积分作用的影响,普通单极性控制的逆变器会存在过零点附近的振荡,而单极性倍频控制在抑制过零点振荡方面有一定优势,基本可做到过零点的平滑过渡。
为提高逆变器的输出波形质量,对比分析了单极性的两种调试方式,分析过零点附近振荡产生的原因,并给出相应的仿真和实验验证。
2电路拓扑及调制方式图1示出单极性SPWM 光伏并网逆变器的主电路拓扑,由全桥4个开关管组成的2路桥臂、滤波器、光伏电池、电网构成。
单极性调制方式分为普通单极性和单极性倍频两种。
2.1普通单极性调制方式的工作原理图2示出普通单极性调制原理。
在u r 正半周期,VQ 1导通,此时VQ 2关断,VQ 3,VQ 4高频互补工作,当u r >u c 时,VQ 4导通,基于单极性SPWM 控制的并网逆变器的研究孙继健,肖岚(南京航空航天大学,自动化学院,江苏南京210016)摘要:光伏并网发电技术已经成为新能源利用的一个重要方向,并网逆变器是光伏系统的核心部件,因此高质量逆变电源成为研究的重点。
单极性并网逆变器相对于双极性并网逆变器损耗低、谐波小、电磁干扰小,因此更适合用于并网逆变控制。
这里分别介绍了两种单极性调制原理,并通过谐波关系图和仿真验证了单极性倍频控制下进网电流具有较小的THD ,同时详细分析了普通单极性控制下进网电流过零畸变的原因。
关键词:并网逆变器;谐波;过零畸变中图分类号:TM464文献标识码:A文章编号:1000-100X (2011)01-0071-03Research on Grid -connected Inverter Based on Unipolar SPWM ControlSUN Ji -jian ,XIAO Lan(Nanjing University of Aeronautics &Astronautics ,Nanjing 210016,China )Abstract :PV grid -connected power generation is the trend at present in the world ,and the grid -connected inverter is core part of PV power generation system ,so high quality inverter is important.The unipolar spwm converter has lower loss ,lower harmonics and lower EMI than bipolar spwm inverter.So unipolar spwm control is fit to be used in grid -connected control.Two control methods are studied.According to the harmonics graph and simulation ,the grid -connect -ed current of unipolar SPWM control has lower THD.The oscillation reason of grid -connected current based on bipolar SPWM control occurring on the zero point of sine wave is analyzed in details.Keywords :grid -connected inverter ;harmonics ;distortion on the zero point71VQ 3关断;当u r <u c 时,VQ 4关断,VQ 3导通;在u r 的负半周期,VQ 1关断,VQ 2导通,VQ 3,VQ 4高频互补动作,当u r >u c ,VQ 3导通,VQ 4关断;当u r <u c 时,VQ 3关断,VQ 4导通。
机电一体化系统设计试题_6答案
习题六答案1、什么是伺服控制?为什么机电一体化系统的运动控制往往是伺服控制?伺服控制系统是一种能够跟踪输入的指令信号进行动作,从而获得精确的位置、速度及动力输出的自动控制系统.机电一体化的伺服控制系统的结构、类型繁多,但从自动控制理论的角度来分析,伺服控制系统一般包括控制器、被控对象、执行环节、检测环节、比较环节等五部分。
2、机电一体化系统的伺服驱动有哪几种形式?各有什么特点?(1)、按被控量参数特性分类按被控量不同,机电一体化系统可分为位移、速度、力矩等各种伺服系统。
其它系统还有温度、湿度、磁场、光等各种参数的伺服系统(2)、按驱动元件的类型分类按驱动元件的不同可分为电气伺服系统、液压伺服系统、气动伺服系统。
电气伺服系统根据电机类型的不同又可分为直流伺服系统、交流伺服系统和步进电机控制伺服系统。
(3)、按控制原理分类按自动控制原理,伺服系统又可分为开环控制伺服系统、闭环控制伺服系统和半闭环控制伺服系统。
3、机电一体化对伺服系统的技术要求是什么?机电一体化伺服系统要求具有精度高、响应速度快、稳定性好、负载能力强和工作频率范围大等基本要求,同时还要求体积小、重量轻、可靠性高和成本低等。
4、试分析直流伺服电机的结构与工作原理。
直流伺服电动机主要由磁极、电枢、电刷及换向片结构组成(如图6-3所示)。
其中磁极在工作中固定不动,故又称定子。
定子磁极用于产生磁场。
在永磁式直流伺服电动机中,磁极采用永磁材料制成,充磁后即可产生恒定磁场。
在他励式直流伺服电动机中,磁极由冲压硅钢片叠成,外绕线圈,靠外加励磁电流才能产生磁场。
电枢是直流伺服电动机中的转动部分,故又称转子,它由硅钢片叠成,表面嵌有线圈,通过电刷和换向片与外加电枢电源相连。
图6-3 直流伺服电动机基本结构图6-4 电枢等效电路直流伺服电动机是在定子磁场的作用下,使通有直流电的电枢(转子)受到电磁转矩的驱使,带动负载旋转。
通过控制电枢绕组中电流的方向和大小,就可以控制直流伺服电动机的旋转方向和速度。
单极性全桥逆变SPWM控制方法以及解决过零点振荡的方案
单极性全桥逆变SPWM控制方法以及解决过零点振荡的方案引言当前众多电源应用领域对交流电源的要求越来越高,传统的电网直接供电方式在很多场合已无法满足要求,因此,需要对电网或者其他能源处理后逆变输出。
高质量的逆变电源已经成为电源技术的重要研究对象。
全桥架构又是逆变器中非常重要的架构。
全桥逆变控制方式主要分为双极性控制方式和单极性控制方式。
双极性控制是对角的一对开关为同步开关,桥臂上下管之间除死区时间外为互补开关,控制相对简单,但是它的开关损耗高,存在很大的开关谐波,电磁干扰大,而单极性控制可以很好地解决这些问题。
全桥逆变器单极性控制仅用一对高频开关,相对于双极性控制具有损耗低、电磁干扰小、无开关频率级谐波等优点,正在取代双极性逆变控制方式。
但由于控制环路的延时作用,单极性控制方式的逆变器仍然受一个问题的困扰,即在过零点存在一个明显的振荡。
单极性控制方式又包括单边方式和双边方式,双边方式相对于单边方式在抑止过零点振荡方面有一定优势,但仍然无法做到过零点的平滑过渡。
为了提高逆变器的输出波形质量,本文分析了,单极性双边控制方式,分析了其振荡产生原因,并介绍一种解决过零点振荡的方案。
1 主电路拓扑单极性SPWM逆变器如图1所示,由2组桥臂构成,一组桥臂(S3,S4)以高频开关工作频率工作,称为高频臂;另一组桥臂(S1,S2)以输出的正弦波频率进行切换,称为低频臂。
2 单极性双边SPWM控制方式单极性逆变有两种产生SPWM的方法,分为单极性单边SPWM控制方式和单极性双边SPWM控制方式,文献l对此有比较详尽的介绍,这里只介绍过零点特性较好的双边控制方式,这种方式对于单边控制方式仍然有效。
在单极性双边SPSM控制方式中,给定的载波信号按正弦方式变化,三角调制波信号,当输出电压为正时三角波为正,输出电压为负时三角波为负,如图2所示。
高频臂上管S3的开关由载波与调制波相比较决定,载波幅值大于调制波则开通,载波幅值小于调制波则关断,除去死区时间,高频臂上管S3与高频臂下管S4的开关完全互补。
单极性SPWM的两种控制方法与过零点输出特性比较
单极性SPWM的两种控制方法与过零点输出特性比较0 引言随着控制技术的发展和对设备性能要求的不断提高,许多行业的用电设备不再直接接入交流电网,而是通过电力电子功率变换得到电能,它们的幅值、频率、稳定度及变化形式因用电设备的不同而不尽相同。
如通信电源、电弧焊电源、电动机变频调速器、加热电源、汽车电源、绿色照明电源、不间断电源、医用电源、充电器等等,它们所使用的电能都是通过对电网电能进行整流和逆变变换后得到的。
因此,高质量的逆变电源已经成为电源技术的重要研究对象。
1 工作原理1.1 主电路拓扑与SPWM的产生单极性SPWM逆变电路的拓扑,由全桥4个开关管组成的2路桥臂所构成,一路以高频开关工作频率工作,称为高频臂(S3,S4);另一路以输出的正弦波频率进行切换,成为低频臂(S1,S2)。
图1 逆变电路主电路结构单极性逆变有两种产生SPWM的方法。
第一种控制方法是将给定的载波(正弦波)整流成正的,调制波(三角波)也是正的,,称为单边SPWM控制;第二种控制方法是给定的载波(正弦波)是一个完整的正弦波,调制波(三角波)当正弦波为正时是正的,当正弦波为负时是负的,,称为双边SPWM控制。
(a) 载波与调制波均为正(b)调制波极性随载波改变图2 两种SPWM产生原理比较上述两种控制方法产生SPWM的机理不一样,各自的控制电路也有所不同。
1.2 单极性SPWM的两种控制方法1.2.1 单边SPWM控制单边SPWM的控制电路。
图3中的Sg3及Sg4分别对应高频臂上下管的驱动信号;Sg1及Sg2分别对应低频臂上下管的驱动信号。
由于低频臂的切换作用,高频臂PWM输出性质随之改变。
例如,原来过零时Sg1的窄脉冲对应输出低电压,低频臂切换后突然成为高电压。
因此,PWM有一突变过程。
图3 单边SPWM控制电路图4所示的是单边SPWM控制方法在过零点时的示意图。
图4中E1为理论上跟基准(电压波形)同相位的误差信号,由于在电压环和电流环两个环节中存在积分环节,根据负载的性质和轻重,实际的输出误差信号E2与基准信号有一个相位差。
单极性SPWM的两种控制方法与过零点输出特性比较

单极性SPWM的两种控制方法与过零点输出特性比较作者:于文涛来源:《科学与财富》2010年第12期[摘要] 本文分别对单极性逆变中的单边与双边SPWM的产生方法及控制方法以及其在正弦波电压过零点附近的振荡情况进行了分析。
理论分析表明,并通过仿真与电路试验证明,双边SPWM中的控制器输出,因没有在过零点附近发生大的突变,其性能更为优越。
[关键词] SPWM控制逆变过零震荡随着控制技术的发展和对设备性能要求的不断提高,许多行业的用电设备不再直接接入交流电网,而是通过电力电子功率变换得到电能,它们的幅值、频率、稳定度及变化形式因用电设备的不同而不尽相同。
如通信电源、电弧焊电源、电动机变频调速器、加热电源、汽车电源、绿色照明电源、不间断电源、医用电源、充电器等等,它们所使用的电能都是通过对电网电能进行整流和逆变变换后得到的。
因此,高质量的逆变电源已经成为电源技术的重要研究对象。
1、工作原理1.1主电路拓扑与SPWM的产生单极性SPWM逆变电路的拓扑如图1所示,由全桥4个开关管组成的2路桥臂所构成,一路以高频开关工作频率工作,称为高频臂(S3,S4);另一路以输出的正弦波频率进行切换,成为低频臂(S1,S2)。
单极性逆变有两种产生SPWM的方法。
第一种控制方法是将给定的载波(正弦波)整流成正的,调制波(三角波)也是正的,如图2(a)所示,称为单边SPWM控制;第二种控制方法是给定的载波(正弦波)是一个完整的正弦波,调制波(三角波)当正弦波为正时是正的,当正弦波为负时是负的,如图2(b)所示,称为双边SPWM控制。
上述两种控制方法产生SPWM的机理不一样,各自的控制电路也有所不同。
1.2单极性SPWM的两种控制方法1.2.1单边SPWM控制单边SPWM的控制电路如图3所示。
图3中的Sg3及Sg4分别对应高频臂上下管的驱动信号;Sg1及Sg2分别对应低频臂上下管的驱动信号。
由于低频臂的切换作用,高频臂PWM 输出性质随之改变。
SPWM逆变电路原理
SPWM逆变电路原理————————————————————————————————作者:————————————————————————————————日期:对于大多数应用场合需要的是工频电源,例如我们的电冰箱,洗衣机,电风扇等都需要正弦波的220伏、50赫兹电源,各种动力设备,远距离输电也都需要正弦波的交流电。
更多的太阳能光伏发电装置输出的是正弦波交流电,目前生成正弦波仍采用前面介绍的全桥电路,只是对开关晶体管的控制采用PWM脉宽调制或移相控制或调频控制等方式。
这里仅介绍最常用的PWM脉宽调制方式。
面积等效原理转换把直流电转换成正弦波交流电是根据根据面积等效原理,在图1上图中的正弦半波(红线)分成n等份,把正弦半波看成是由n个彼此相连的矩形脉冲组成的波形,为简单清晰,划分为7等份。
7个脉冲的幅值按正弦规律变化,每个脉冲面积与相对应的正弦波部分面积相同,这一连续脉冲就等效正弦波。
图1 用面积等效原理转换为SPWM波形如果把上述脉冲序列改为相同数量的等幅而不等宽的矩形脉冲(图1下图),脉冲中心位置不变,并且使该矩形脉冲面积和上图对应的矩形脉冲相同,得到图1下图所示的脉冲序列,脉冲宽度按正弦波规律变化,这就是PWM波形。
根据面积等效原理,PWM波形和正弦半波是等效的,图中红线就是该序列波形的平均值。
对于正弦波的负半周,也可以用同样的方法得到PWM 波形。
这种脉冲的宽度按正弦规律变化而和正弦波等效的PWM波形,也称SPWM波形。
要改变等效输出的正弦波的幅值时,只需按照同一比例系数改变上述各脉冲的宽度即可。
SPWM波形的生成输出SPWM波形仍需全桥逆变电路,在“光伏用DC-DC变换器”课件中已介绍过这种电路,通过控制开关晶体管的通与断在负载上产生交变电压,见图2。
s图2 全桥逆变电路的工作状态输出SPWM波形的矩形波必须生成序列的控制信号来控制桥式电路中开关晶体管的通与断,普遍使用的是调制法来生成控制信号,可采取单极性调制也可采用双极性调制来生成控制信号,下面介绍常用的单极性调制方式。
单双极性SPWM单相桥电压型逆变电路课程设计单极性

单双极性SPWM单相桥电压型逆变电路课程设计单极性单极性PWM控制方式调制信号ur为正弦波,载波uc在ur的正半周为正极性的三角波,在ur的负半周为负极性的三角波。
在ur的正半周,V1保持通态,V2保持断态。
当ur>uc时使V4导通,V3关断,uo=Ud。
当ur<uc时使V4关断,V3导通,uo=0。
在ur的负半周,V1保持断态,V2保持通态。
当ur<uc时使V3导通,V4关断uo=-Ud。
当ur>uc时使V3关断,V4导通,uo=0。
主电路在每个开关周期内输出电压在正和零(或负和零)间跳变,正、负两种电平不会同时出现在一个开关周期内,故称为单极性SPWM。
七、单极性SPWM调制分析载波比和调制深度的定义与双极性SPWM相同。
它不适于半桥电路,而双极性SPWM在半桥、全桥电路中都可以使用。
与双极性SPWM相同,在m<=1和fc>>f的条件下,单极性SPWM逆变电路输出的基波电压u1的幅值U1m满足如下关系:U1m=mUd即输出电压的基波幅值随调制深度m线性变化,故其直流电压利用率与双极性时也相同。
就基波性能而言,单极性SPWM和双极性SPWM完全一致,但在线性调制情况下它的谐波性能优于双极性调制:开关次整数倍谐波消除,值得考虑的最低次谐波幅值较双极性调制时小得多,所需滤波器也较小。
八、建立单极性SPWM仿真模型单极性SPWM触发信号产生图:为[101]。
对脉冲电路进行封装:触发电路中三角载波(Triangle)参数设置:“TimeValue”为[01/fc/21/fc],“OutputValue”单极性SPWM主电路:触发电路参数设置:Ud=300v,R=1欧,L=2mH九、进行单极性SPWM仿真1、仿真时间设为0.06键入MATLAB语言命令:>>ubplot(4,1,1)>>ubplot(4,1,2)仿真结果如下:单极性SPWM单相逆变器m=0.8,N=15时的仿真波形图仿真结果分析:输出电压为单极性SPWM型电压,脉冲宽度符合正弦变化规律。
SPWM全桥逆变器主功率电路和控制电路设计
SPWM全桥逆变器主功率电路设计一、课程设计目的本课程是自动化专业的学生在掌握所学习的专业基础课和专业课的基础上一次较全面的实践训练,通过完成一个具有较完善功能的设计课程题,达到训练学生综合运用所学知识的能力。
通过本科电力电子技术学习,熟悉无源逆变的概念。
二、任务采用全桥拓扑并用全控器件MOSFET形成主电路拓扑,设计逆变器硬件电路,并能开环工作。
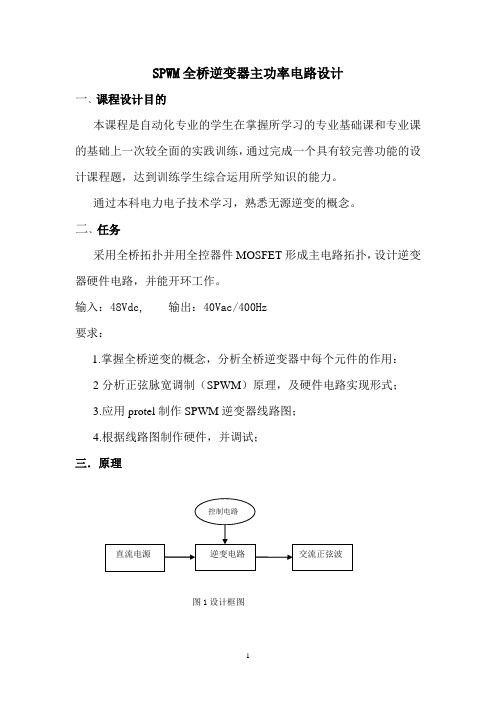
输入:48Vdc, 输出:40Vac/400Hz要求:1.掌握全桥逆变的概念,分析全桥逆变器中每个元件的作用:2分析正弦脉宽调制(SPWM)原理,及硬件电路实现形式;3.应用protel制作SPWM逆变器线路图;4.根据线路图制作硬件,并调试;三.原理图1设计框图逆变电路是指将低电压变为高电压,把直流电变为交流电的电路,它与整流电路相对应,是通用变频器的核心部件之一,有非常重要的作用.它的基本作用是在控制电路的控制下,将中间的直流电路输出的直流电源转换为频率和电压都任意可调的交流电源。
如图所示1 设计的主要原理是,通过逆变电路对输入的直流电源进行逆变,在控制电路的作用下,使之输出想要的正弦信号。
PWM控制就是对脉冲的宽度进行调制的技术。
即通过对一系列脉冲的宽度进行调制,来等效地获得所需要波形(含形状和幅值)。
当采用正弦波作为调制信号来控制输出PWM脉冲的宽度,使其按照正弦波的规律变化,这种脉冲宽度调制控制策略就称为正弦脉冲宽度调制,产生SPWM脉冲,采用最多的载波是等腰三角波;因为等腰三角波上任一点的水平宽度和高度成线性关系且左右对称,当它与任何一个平缓变化的调制信号波相交时,如果在交点时刻对电路中开关器件的通断进行控制,就可以得到宽度正比于信号波幅值的脉冲。
在调制信号波为正弦波时,所得到的就是SPWM波形。
四主电路设计桥式逆变结构:基本的电压源桥式逆变结构,两组功率开关串联跨接于电源,成为一个桥臂,以其串联中点为输出点。
这样的结构不允许串联开关同时导通,按照不同开关的通断组合,桥臂可以将它所跨接的两个不同电位作为输出,合理安排这些不同的桥臂输出电位可能生成有正有负的输出电压,这是桥式逆变电路实现电源极性变换的基本原理。
单相全桥并网逆变器SPWM控制
单相全桥并网逆变器SPWM控制逆变器是把直流电转换成正弦波交流电的装置,不管是并网逆变器还是离网逆变器,不管是单相逆变器还是三相逆变器,不管是H4还是H6,SPWM (Sinusoidal Pulse Width Modulation)是实现逆变的主要方式,当然三相逆变器也可以用SVPWM实现。
SPWM法是一种比较成熟的,目前使用较广泛的PWM法。
根据采样控制理论中的一个重要结论:冲量相等而形状不同的窄脉冲加在具有惯性的环节上时,其效果基本相同。
SPWM法就是以该结论为理论基础,用脉冲宽度按正弦规律变化而和正弦波等效的PWM波形,即SPWM波形控制逆变电路中开关器件(IGBT或MOSFET)的通断,使其输出的脉冲电压的面积与所希望输出的正弦波在相应区间内的面积相等,通过改变调制波的频率和幅值则可调节逆变电路输出电压的频率和幅值。
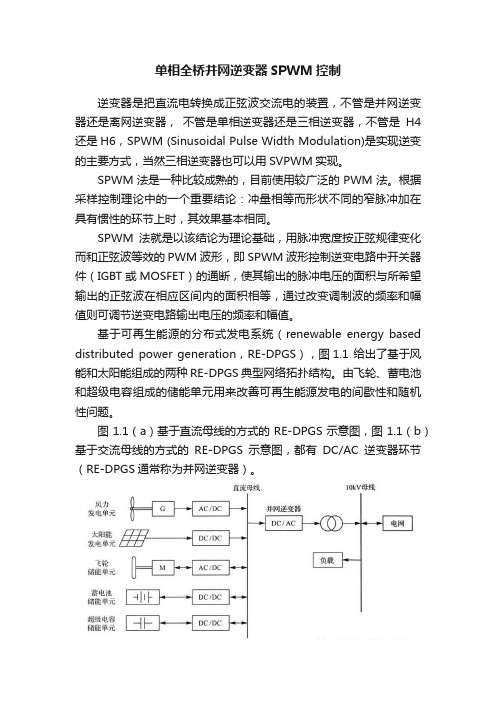
基于可再生能源的分布式发电系统(renewable energy based distributed power generation,RE-DPGS),图1.1 给出了基于风能和太阳能组成的两种RE-DPGS典型网络拓扑结构。
由飞轮、蓄电池和超级电容组成的储能单元用来改善可再生能源发电的间歇性和随机性问题。
图1.1(a)基于直流母线的方式的RE-DPGS示意图,图1.1(b)基于交流母线的方式的RE-DPGS示意图,都有DC/AC逆变器环节(RE-DPGS通常称为并网逆变器)。
给大家分享一下单相全桥并网逆变器的两种产生方式,双极性SPWM产生方式,单极性倍频SPWM产生方式,文章摘自——LCL 型并网逆变器的控制技术_阮新波。
单极性与双极性PWM模式https:///view/18b45957561252d380eb6e9 e.html从程序方面谈谈本人对逆变器的理解/thread-287532-1-1.html三相逆变电源/forum.php?mod=viewthread&tid=292260&page=1#pid11 61651关于SPWM的单极性和双极性/bbs/889047.html纯正弦波逆变技术的讨论——单极性与双极性工作方式的讨论/bbs/711893.html单极性SPWM的两种控制方法与过零点输出特性/diangong/article/2009-7-30/11120-1.htm双极性模式下pwm逆变电路的计算机仿真https:///view/d1bfd3d7240c844769eaeed a.html?re=view看完本文有收获?请分享给更多人文章来源于收集整理于网络,如有侵权,请联系小编删除。
SPWM全桥逆变器主功率电路和控制电路设计共10页

SPWM全桥逆变器主功率电路和控制电路设计一.设计目的通过电力电子技术的学习,熟悉无源逆变概念;采用全桥拓扑并用全控器件MOSFET形成主电路拓扑,设计逆变器硬件电路,并能开环工作。
熟悉全桥逆变器拓扑,掌握逆变原理,实现正弦波输出要素,设计SPWM逆变器控制信号发生电路。
输入:48VDC 输出:40VAC/400HZ二.设计任务(1) 掌握全桥逆变的概念,分析全桥逆变器中每个元件的作用;(2)分析正弦脉宽调制SPWM原理,及硬件电路实现形式;(3)应用Protel 制作SPWM 逆变器线路图;(4)根据线路图制作硬件,并调试;三.设计原理电路组成及工作原理分析:电路主要由正弦波和三角波发生电路,控制电路和逆变电路组成。
电路中所用到的元器件主要有ICL8038,运算放大器LF353,比较器LM311,IR2110,MOSFET,CD4069,电阻电容及齐纳二极管组成。
控制电路分析:当电路开始工作,首先由ICL8038产生的正弦波和三角波,正弦波和三角波的幅值由可调电阻来控制,得到的波可以通过LF353运算放大器构成的反相电路进行反向,得到方向相反的正弦波,正弦波与三角波信号通过LM311比较芯片产生SPWM脉冲。
主电路分析:本次设计我们采用倍频式SPWM技术,在开关频率不变的情况下,达到输出频率倍增的效果。
IR2110用于驱动全桥逆变器用以控制MOSFET的通断,在IR2110的外围电路使用二极管和齐纳二极管防止MOSFET的同时导通而击穿。
如下图所示,MOSFET采用2SK1825,4个2SK1825两两串联后并联成桥式逆变主电路,U输入为出入电压,VDC 输出电压,电容C1、C3为VCC的滤波电容,电容C2、C4为自举电容,二极管为自举二极管。
MOSFET的驱动采用芯片IR2110驱动,2个IR2110芯片分别驱动桥式逆变主电路的2个桥臂。
工作时,两个IR2110(1)和IR2110(2)的输入SPWM脉冲是相反的,两个IR2110分别驱动不同桥臂的MOSFET管,IR2110(1)的HO驱动Q1、IR2110(1)的LO驱动Q2,IR2110(2)的HO驱动Q3、IR2110(2)的LO 驱动Q4,由于输入的两个SPWM脉冲是相反的,2个桥臂上的MOSFET 管会交叉导通,即Q1、Q3同时导通或者Q2、Q4同时导通,两种情况依次循环导通,从而完成逆变。
单极性SPWM的两种控制方法与过零点输出特性比较
/ / / 八 \ \ \ பைடு நூலகம்
1 『 f1 fI f 1
㈠ 1 IJ l 。 誓 I
。 U . {
■‘ ~ ÷ \ l
曩 ,
_
■
v
\
图 8 双边 S V M 控制方 法仿 真波形 PV
】1 -一 { f 』U00 L门n
j
Ⅲ 』
姆 瓴
r
l {
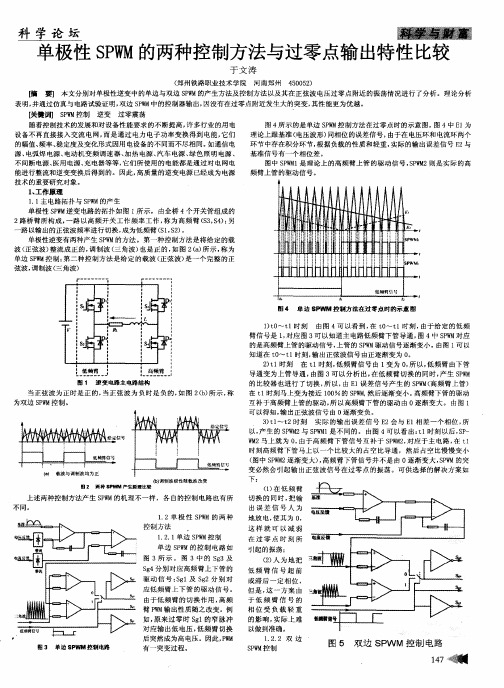
图 6 双边 SP WM控制在过零点附近 的 SINM 示意 图  ̄ 图 6所示的是双边 S W P M控制方法在过零 点附近的 SW PM示意 图。图 6 中E 1为理 论上跟基准 ( 电压波形) 同相位 的误差信号, 由于在 电压环 和电 流环两个环节中存在积分环节 ,实际的误差信号 E 2会与基准信号相差一 个相位。图中 S W 1 P M 是理论上的高频臂上管 的驱动信 号,P M S W 2则是实际 的 高频 臂 上 管 的 驱动 信 号 。 1 t ~ t 刻 由图 6可 以 看 到 , t ~ t ) O 1时 在 O 1时 刻 , 于给 定 的 低 频 臂 由 信 号 是 1对 应 图 5可 以知 道 主 电路 低 频 臂 下 管 导 通 , 6中 S W , 图 P M对 应 的 高频臂上管的驱动信号 , 由图 1可 以知道在 加~t 0时刻 , 出正弦波信号 输
) 图1 单曲s 0 控 制方法之宴验渡 ( 环后 彤 闭
32双 边 s 州 控 制 方 法之 实验 波 形 . P
实验波 形如 图 1 所示。 1
2 t 时刻在 t 时刻 , )1 1 低频臂信号 由 1变为 0所 以低频臂 由下 管导通 , 变为上 管导通 , 由图 5可 以分析 出, 在低频 臂切 换的同时 , 产生 S W P M的比 较器也进行 了切换 , 以, E 误差信 号产 生的 S W 高频臂上管) t 所 由 1 P M( 在 1 时刻 马上变为 10 0 %的 SW , PM 然后逐渐变 小。高频臂下 管的驱动互补于高 频臂上管的驱动 , 以, 所 高频臂下管 的驱动 由 0逐渐变 大。 由图 1可 以得 知 , 出正 弦 波信 号 由 0逐 渐变 负 。 输 3 t ~t ) 1 2时刻实际的输 出误差 信号 E 2会 与 E 相差 一个 相位, 以, l 所 产生的 SW 2与 S W 1是不 同的, PM PM 由图 6可 以看 出, t 到 t 在 1 2时刻, 高频 臂上管驱动~直都是高 电平,由于高频臂下管互补于上管驱动 ,所 以, 在 t到t 1 2时刻 , 高频 臂下 管是不导通 的, 此后有一软 开通过程 。由图 6中 S W 1与 SW 2的比较可 以看 出, PM PM 误差信号滞后于基准信 号有利 于抑 制正 弦波输出信号在过零点的振 荡。 2计算机仿真与实验结果 、 应 用 电 子 电 路计 算 机 辅 助 分 析 于 设 计 软 件 M ta ,分 别 对 上 述 两 种 a lb 控 制 方 法进 行 了仿 真 。
华广09级电气《电力电子技术》填空题
09级《电力电子技术》课程复习题目绪论1.电力电子技术是应用在领域的电子技术。
2.电力电子技术是使用电器件对电能进行的技术。
3.电力变换的四大类型是:、、、。
4.电力电子技术的研究内容包括两大分支:技术和技术。
5.电力电子技术是一门由、、三个学科交叉形成的新的边缘技术学科。
6.在功率变换电路中,为了尽量提高电能变换的效率,所以器件只能工作在状态,这样才能降低功率损耗。
一、电力电子器件一、填空题1.电力电子器件是直接用于电路中,实现电能的变换和控制的电子器件。
2. 主电路是在电气设备或电力系统中,直接承担的电路。
3. 处理信息的电子器件一般工作与放大状态,而电力电子器件一般工作在状态。
4. 电力电子器件组成的系统,一般由、、、四部分组成。
5. 按照器件能够被控制的程度,电力电子器件可分为以下三类:、、。
6. 按照驱动电路信号的性质,电力电子器件可分为以下两类:、。
7. 电力二极管的主要类型有、、。
8.在如下器件:电力二极管(Power Diode)、晶闸管(SCR)、门极可关断晶闸管(GTO)、电力晶体管(GTR)、电力场效应管(MOSFET)、绝缘栅双极型晶体管(IGBT)中,属于不可控器件的是,属于半控型器件的是,属于全控型器件的是,属于单极型电力电子器件的有,属于双极型器件的有、,属于复合型电力电子器件的有,在可控的器件中,容量最大的是,工作频率最高的是,属于电压驱动的是、,属于电流驱动的是、。
二、选择题1. 当晶体承受反向阳极电压时,不论门极加何种极性触发电压,管子都将工作在()A.导通状态B.关断状态C.饱和状态D.不定2.功率晶体管GTR从高电压小电流向低压大电流越变的现象成为()A.一次击穿B.二次击穿C.临界饱和D.反向截止3.已经导通了的晶闸管可被关断的条件是流过晶闸管的电流()A.减小至维持电流I H以下B.减小至擎住电流I L以下C. 减小至门极触发电流I G以下D. 减小至5A以下二、整流电路1.单相半波可控整流电阻性负载电路中,控制角度α的最大移相范围是()。
光伏逆变器几种常用SPWM波形生成算法与数字调制方式

前言:光伏逆变器与普通逆变器的最大区别,直流源的不同。
直流源由原来的蓄电池,或其它直流源换成了PV组件(太阳能电池)。
因PV组件特殊性,与普通逆变器不同的是,光伏逆变器多了一级MPPT(最大功率控制),其它基本相同。
光伏逆变器也可以叫太阳能逆变器,主要种类有,离网的光伏逆变器、并网的光伏逆变器、离并网的光伏逆变器并机的光伏逆变器等等,注意并网与并机逆变器是在控制上是有很大区别的。
当然无论是那一种光伏逆变器。
它的核心技术就是普通逆变器的技术。
整个逆变器控制技术它主要包含了电力电子技术、自动化控制原理、数字控制技术等等,这里数字控制技术是重点。
而SPWM波形生成算法和数字调制方式又是逆变器数字控制的核心点。
不同波形生成算法与调制算法决定了不同的电路和不同的THD(总谐波失真)比如说,单极性调制算法,肯定是用于全桥电路,不能用于半桥。
双极性的调制算法的谐波失真肯定是要高于单极性等等。
本文主要阐述了SPWM的几种常用的波形生产算法与数字调制方式●SPWM的几种常用的波形生产算法SPWM(正弦波脉宽调制)波的产生的常用算法有对称规则算法、不对称规则算法、等面积算法、SVPWM算法。
这四种算法分别有着自己不同的特点。
实验表明采用对称规则采样法产生的SPWM 波形,具有速度快、变频方便等优点。
不对称规则采样法是对称规则的优化版,相对对称规则采样法,采样误差减小,精度有所提高。
等面积法产生的SPWM 波形相对于前两种具有精度更高、输出波形谐波小,对称性好等优点。
SVPWM(电压空间矢量算法),具有直流电压利用率高的优点,在大功率三相逆变器应用较多。
由于本人对此算法还没有深入理解本文暂时省略。
(同时也请教论坛中的师傅们讲一下此算法的原理)▲对称规则采样法如图1所示。
它固定在三角波每一周期的负峰值时找到正弦波上的对应点E ,并用此电压值对三角波进行采样,确定SPWM波形中脉冲的生成时刻。
如图2所示可求得SPWM脉冲宽度t2 和间隙时间t1和t3 。
逆变器单极性电流SPWM控制与滞环控制比较

逆变器单极性电流SPWM 控制与滞环控制比较朱军卫,龚春英(南京航空航天大学,江苏南京 210016) 摘要:分析了电流滞环控制型及电流SPWM (正弦脉宽调制)控制倍频调制型逆变器的工作原理;讨论了这两种控制方式下逆变器的谐波分布,给出了各自滤波器的设计方法,并针对它们制作了两台300W 原理样机。
通过仿真与实验验证,与电流滞环控制型逆变器相比,电流SPWM 控制倍频调制型逆变器具有谐波分布固定,滤波器设计简单的优点,在开关频率相同的条件下,要获得滤波后相同质量的输出波形,前者的滤波器大大小于后者。
关键词:脉宽调制;滤波器;频谱分析/滞环控制中图分类号:TM464 文献标识码:A 文章编号:1000-100X (2004)01-0026-04Performance Comparison of the U nipolar Current 2SPWMControl and H ysteresis Control InverterZHU J un 2wei ,GON G Chun 2ying(N anjing U niversity of Aeronautics and Ast ronautics ,N anjing 210016,China )Abstract :In the paper ,the operating principle of current hysteresis control and current SPWM (Sinusoidal Pulse Width Modulation )control inverters is analyzed separately at first.Then harmonic distribution of the two kinds of invert 2ers is discussed in detail and filter design technique is introduced.Two 300W prototypes are made according to the two kinds of operating principle.Finally ,the simulation and experimental results illustrate that the current SPWM control in 2verter hasthe advantages of fixed harmonic distribution ,sim ple filter design ,and the filter is smaller than that of the cur 2rent hysteresis inverter to obtain same output voltage performance at the same switching frequency.K ey w ords :PWM ;filter ;spectrum analysis/hysteresis control1 引 言T HD (Total Harmonic Distortion )是衡量一台逆变电源性能的重要指标,从逆变器诞生之日起,研究者们就把消除谐波,减小输出电压的T HD ,提高输出电压质量作为一项重要的研究内容。
SPWM逆变电源的单极性控制方式实现
3 两种控制方式的工作过程
3 3 不同控制方式工作状态分析
在一个开关周期中,uPwM或IIPwM控制全桥 逆变器有4个上作状态,即:(1)u:>O,,>O;(2)u。 >o,,<o;(3)U.<o,,>o;(4)f,。<O,,<()。当 工作往状态(1)、状态(3)及工作杠状态(2)中,E导 通,和状态(4)中,7n导通上作过程·样。、只有住状 态(2)中,丑关断时,在状态(4)中,T4关断时,工作 过程不一样。下面主要分析这两种情况下,不同控制 力式的电路模式。 3.3.1 (,,>0,,<0,7‘.关断时的电路模式
图3 HPwM控制方式波形
2.3 两种控制方式下输出电压频谱图
利用pspice,结合上述的电路拓扑结构.建市仿 真模型进行仿真,得到2种控制方式下输卅电压频 谱图,如图4、图5所示。
100
I >
o
l|Il址Ⅲ.“……
0 J00 200 300 400
500
600
700
,/klIz
图4 uP、vM调制方式下的输出电压的频谱图
机车变频空调巾,它控制精度高.运行平稳。实践证 明,该变频调速系统具有良好的效果。
参考文献: [1]陈伯时,陈敏逊交流涮速系统[M北京:机械工业出
版社,2000 [2]杨贵杰,等空间矢量脉宽调制方法的研究[J]巾圈屯
机工程学报,2001,2“5):79—83.
[3j Tw岫fllowslli,A M.鼬din,L,and k斟w幽,s F籼忡
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一款全桥逆变单极性的SPWM控制方式过零点振荡
摘要:
单极性全桥逆变相对于双极性逆变损耗低,电磁干扰少,单极性SPWM更适用于逆变控制,但该控制方式存在一个过零点振荡。
介绍了单极性逆变中的双边SPWM的控制方法,分析了这种控制方法在正弦波电压过零点附近的振荡现象,提出一种解决过零点振荡的方案,并经实验验证。
引言
当前众多电源应用领域对交流电源的要求越来越高,传统的电网直接供电方式在很多场合已无法满足要求,因此,需要对电网或者其他能源处理后逆变输出。
高质量的逆变电源已经成为电源技术的重要研究对象。
全桥架构又是逆变器中非常重要的架构。
全桥逆变控制方式主要分为双极性控制方式和单极性控制方式。
双极性控制是对角的一对开关为同步开关,桥臂上下管之间除死区时间外为互补开关,控制相对简单,但是它的开关损耗高,存在很大的开关谐波,电磁干扰大,而单极性控制可以很好地解决这些问题。
全桥逆变器单极性控制仅用一对高频开关,相对于双极性控制具有损耗低、电磁干扰小、无开关频率级谐波等优点,正在取代双极性逆变控制方式。
但由于控制环路的延时作用,单极性控制方式的逆变器仍然受一个问题的困扰,即在过零点存在一个明显的振荡。
单极性控制方式又包括单边方式和双边方式,双边方式相对于单边方式在抑止过零点振荡方面有一定优势,但仍然无法做到过零点的平滑过渡。
为了提高逆变器的输出波形质量,本文分析了,单极性双边控制方式,分析了其振荡产生原因,并介绍一种解决过零点振荡的方案。
主电路拓扑。