基于Matlab和FPGA的SPWM波形的实现
基于MATLAB与FPGA的图像处理教程

这本书的作者韩彬、林海全和姜宇奇都是电子工业社的专家,他们深入浅出地 讲解了基于MATLAB和FPGA的图像处理原理和应用。其中,MATLAB作为一种强 大的数学计算和算法开发工具,被广泛用于算法设计和验证。而FPGA(现场可 编程门阵列)则是一种灵活的硬件加速引擎,可以用于实现高性能的并行处理 和计算。
当谈到MATLAB在图像处理中的应用时,作者强调:“MATLAB是一个强大的科 学计算工具,它提供了丰富的图像处理工具箱,使得用户可以轻松地实现各种 复杂的图像处理算法。”
对于如何结合MATLAB和FPGA进行图像处理,作者解释道:“通过将MATLAB算 法部署到FPGA上,我们可以实现高速、实时的图像处理。这是因为FPGA具有 高并行性和高效率的特点,可以大大提高算法的执行速度。”
在理解了图像处理算法的理论基础之后,本书通过MATLAB软件将这些算法进 行实现和验证。这部分内容详细介绍了如何使用MATLAB进行图像处理的各种 操作,包括图像的读取、处理和显示等。通过这部分内容,读者可以深入理解 图像处理算法在软件层面的实现方法。
这一部分是本书的核心内容,它详细介绍了如何将前面所学的图像处理算法通 过FPGA进行并行硬件加速。这部分内容涉及到了FPGA的基本知识、硬件设计 流程以及具体的实现案例。通过这部分内容,读者可以了解到FPGA在图像处理 领域的应用以及如何将算法移植到FPGA上进行硬件加速。
内容摘要
这些实例涵盖了多种图像处理算法,包括图像滤波、边缘检测、形态学操作等。通过这些实例, 读者可以深入了解FPGA图像处理的实现细节。 《基于MATLAB与FPGA的图像处理教程》是一本理论与实践相结合的教程,适合对图像处理和嵌 入式系统开发感兴趣的读者阅读。通过本书的学习,读者可以掌握使用MATLAB和FPGA进行图像 处理的核心技能,为实际项目的开发提供有力的支持。
基于FPGA的SPWM信号实时生成及死区补偿_王晗

正弦脉宽调制 ( SPWM) 技术在数 字电源领 域 中 得 到 广 泛 应 用[1],但 是
采用 SPWM 技术的数字电源产生高准
确度、稳 定 的 输 出 波 形 是 一 个 技 术 难
基于 DDS 的频率控制公式为
Fout = ( F × Fc ) /2N
(1)
式中,Fout为输出信号的频率; F 为频率控制字;
Fc 为系统时钟 250 MHz; N 为相位累加器的位宽,
该系统采用 32 bit。
转换装置及其他控制流程部分。
硬件设计
根据 SPWM 波形控制及补偿原理,本文设计
基于 DDS 的相位控制公式为
点,这与 SPWM 波 的 质 量 有 关。目 前
产生 SPWM 的方法有很 多,主 要 有 以
下两种: 一种是利用具有 PWM 发生电
路 的 专 用 微 处 理 器 芯 片, 如
TMS320F240、TMS320F2812 等, 但 这
王 晗 /副教授
关键词 /Keywords 正弦脉宽调制· FPGA·
1. SPWM 产生模块
该模块采用自然采样法将数字化的三角波和
数字化的正弦波进行调制,用载波三角波与正弦
调制波的交点来自然地确定脉冲的采样点和开关
点,进而控制开关器件的通断。采样点和开关点 采用比较器进行比较确定,从而调制出 SPWM 波
图 3 DDS 产生数字化正弦波原理图
(3) 三角波发生模块
形。该模块主要包括倍频模块、DDS 正弦波发生
参考文献
图 7 调制波为 100 Hz 时 SPWM 输出波形
基于FPGA的SVPWM算法的实现

基于FPGA的SVPWM算法的实现基于FPGA的SVPWM(Space Vector Pulse Width Modulation)算法的实现是一种用于驱动三相交流电机的技术。
在这种方法中,通过控制电机的电压向量的位置和尺寸来实现对电机的精确控制。
FPGA(Field Programmable Gate Array)是一种可编程逻辑器件,可以根据用户的需求重新编程以实现特定的功能。
在FPGA上实现SVPWM算法有以下几个关键步骤:1.电压向量生成:SVPWM算法通过构造一个六段可调节电压波形,使其在不同时间点上可以形成不同电压向量的组合。
每个电压向量由两个电压矢量之间的比例组成。
在FPGA上,可以使用可编程逻辑来实现这个功能。
2.电流测量:为了实现电机的闭环控制,需要测量电机的电流。
通过使用电流传感器或其他测量方法(如电压降法或电流传感器),可以获取电机的电流值。
在FPGA上实现电流测量可以使用模数转换器(ADC)模块,将模拟信号转换为数字信号。
3.PI控制器:SVPWM算法中使用PI控制器来控制电压向量的位置和尺寸,以达到所需的电机运行状态。
PI控制器根据电机的误差信号来调整电压向量的输出。
在FPGA上,可以使用可编程逻辑来实现PI控制器的功能。
4.PWM产生:在SVPWM算法中,需要通过调制信号产生脉冲宽度调制(PWM)信号,以控制电机的转矩和速度。
在FPGA上,可以使用特定的计数器来生成PWM信号。
这可以通过编程FPGA来实现。
5.输出驱动器:最后,FPGA需要输出PWM信号来驱动电机。
可以使用外部电路或FPGA的IO引脚来连接到电机的驱动器。
驱动器可以将逻辑电平的PWM信号转换为适合电机的电压和电流信号。
在FPGA上实现SVPWM算法可以提供高度可配置和灵活的控制方式,并且可以实现高效的电机控制。
通过使用FPGA,可以根据实际需求对电机的控制算法进行调整和优化,实现更好的性能和效率。
此外,FPGA还具有可编程性和可重复使用性的优势,可以适应不同的电机类型和控制需求。
载波水平移相SPWM控制器的研究
载波水平移相SPWM控制器的研究陈干;苟锐锋;刘宁;何岸【摘要】级联多电平拓扑结构广泛用于高压变频调速、无功补偿以及电气化铁路牵引等众多领域,本文对基于此类拓扑结构的载波水平移相SPWM调制控制技术进行了Matlab仿真分析,验证了载波水平移相SPWM调制方法的可行性以及理论分析的正确性.在此基础上应用FPGA器件及其开发环境通过软件编程实现载波水平移相SPWM波形生成,进而设计了三相级联载波水平移相SPWM控制器,并通过代码仿真验证了本方案的可行性.【期刊名称】《电气技术》【年(卷),期】2016(000)010【总页数】5页(P49-52,58)【关键词】载波水平移相;FPGA;逆变器;SPWM【作者】陈干;苟锐锋;刘宁;何岸【作者单位】西安西电电力系统有限公司,西安710065;西安西电电力系统有限公司,西安710065;西安西电电力系统有限公司,西安710065;西安西电电力系统有限公司,西安710065【正文语种】中文基于多载波的 SPWM技术是多电平变换器较常用的调制策略之一,是两电平SPWM技术在多电平变换器中的直接拓展[1]。
目前实现多载波 SPWM一般采用载波水平移相(Phase Shifted SPWM,PS-SPWM)和载波垂直移相(LevelShifted SPWM,LS-SPWM)两种技术,前者由于具有等效开关频率高、输出电压谐波含量小、信号传输带宽较大以及控制方法简便等优良特性而广泛应用在级联H桥多电平变流器中。
生成 SPWM脉宽调制波有多种方法,从采用HEF4752、MA818等专用SPWM芯片到单片机或数字信号处理器等,但是随着各种新型SPWM技术的发展对控制芯片提出的更高要求,特别是基于多载波的SPWM技术需要同时输出多路PWM 波,数字信号处理器芯片最多只能产生 12路,不能满足要求。
FPGA器件处理复杂时序和组合逻辑功能强大,具有现场可编程、代码通用性好、易于扩展等特点[2],对于实现多载波SPWM调制波比较适合。
基于MATLAB的脉宽调制(PWM,SPWM,SVPWM)

第1章绪论1.1 脉宽调制技术的研究背景——电气传动的发展随着电力电子技术、微处理器技术的发展以及材料技术尤其是永磁材料技术的进步,电气传动系统,包括交、直流电动机调速及伺服系统,正在向系统高性能、控制数字化、一体化机电的方向发展。
直流传动系统控制简单、调速特性好,一直是调速传动领域中的重要组成部分。
现代的直流传动系统的发展方向是电动机主极永磁化及换向无刷化,而无刷直流电动机正是在这样的趋势下所发展起来的机电一体化电动机系统。
一般意义上的无刷直流电动机(Bruhless DC Motor,BLDCM)是指方波无刷直流电动机,其特征是只需简单的开关位置信号即可通过逆变桥驱动永磁电动机工作。
1975年无刷直流电动机首次出现在NASA报告中。
之后,由于高性能、低成本的第三代永磁材料的出现,以及大功率、全控型功率器件的出现,使无刷直流电动机系统获得了迅速的发展。
1977年,出现了采用钐钻永磁材料的无刷直流电动机。
之后不久,无刷直流电动机系统开始广泛采用高磁能积、高矫顽力、低成本的第三代NdFeB永磁材料,且采用霍尔元件作位置传感器,采用三相全桥驱动方式,以提高输出转矩,使其更加实用。
1986年,H.R.Bolton对方波无刷直流电动机系统进行了全面的总结,这标志着方波无刷直流电动机系统在理论上、驱动控制方法上已基本成熟。
近年来,虽然永磁直流电动机也随着永磁材料技术的发展而得到了性能的提高,依然在直流传动系统中被广泛应用,但直流传动系统已经处于无刷直流电动机大规模普及与应用的阶段。
现代交流传动系统已经由感应电动机为主发展为多机种,尤其是以永磁同步电动机的发展最为显著。
一方面,由感应电动机构成的交流调速系统性能依然不断提高,变压变频(VVVF)技术及矢量控制技术完全成熟。
通过模仿直流电动机中转矩控制的思路,采用坐标变换,把交流感应电动机的定子电流分解成励磁分量和转矩分量,并通过对磁通和转矩的独立控制、使感应电动机获得类似直流电动机的控制特性。
SPWM原理以及具体实现方法
SPWM原理以及具体实现方法SPWM(Sinusoidal Pulse Width Modulation)是一种通过改变脉冲宽度来实现正弦波形输出的调制技术。
它是一种广泛应用于交流调速、无线电通信、音频音频处理等领域的调制技术。
本文将详细介绍SPWM的原理和具体实现方法。
一、原理SPWM的基本原理是将一个固定频率的三角波和一个可变频率的正弦波进行比较,通过改变正弦波的频率和三角波的升降沿来控制输出脉冲的宽度,从而实现输出波形的调制。
具体实现方式如下:1.生成三角波:首先需要生成一个固定频率的三角波,可以使用计数器、比较器和数字-模拟转换器等元件实现。
计数器用于产生固定频率的方波信号,比较器用于将方波信号转换为三角波信号,数字-模拟转换器用于将三角波信号转换为模拟电压信号。
2.生成正弦波:使用正弦函数生成一个可变频率的正弦波,频率根据应用需求决定。
一般使用时钟、计数器和查表法实现,通过改变时钟的计数值和查表法来调整正弦波的频率。
3.比较器:将三角波和正弦波进行比较,比较的方法可以使用电压比较器或者运算放大器进行。
根据比较结果,可以确定脉冲的宽度。
4.输出脉冲:通过改变脉冲的宽度来控制输出波形的幅值大小。
当三角波的斜率大于正弦波时,输出脉冲宽度增大;当三角波的斜率小于正弦波时,输出脉冲宽度减小。
5.滤波器:通过滤波器对输出脉冲进行处理,去除高频成分,得到带有基波的正弦波。
SPWM的具体实现方法依赖于所使用的平台和应用需求。
下面以数字信号处理平台为例,介绍SPWM的具体实现方法。
1.生成三角波:使用计数器和比较器,生成一个固定频率的三角波信号。
计数器的计数范围决定了三角波的周期,比较器将计数器的输出进行比较并产生三角波信号。
2.生成正弦波:可以通过使用FPGA或DSP等处理器实现正弦波的生成。
根据所需频率和精度,使用查表法或数学函数生成正弦波信号。
3.比较器:将三角波和正弦波进行比较,可以使用比较器模块实现比较操作。
基于Matlab的SVPWM波产生方法

N l 2 3 4 5 6
c = i g n ( 一 4 7 u ~ )
定义变量 . , v: +2 B +4 C ,通 过 L I a , 可 以 计 算 出变 量 N , 根 据表 格 1可对 应 的找 到扇 区 号 。
得到 了扇 区位 置 ,设 定 P W M波 周 期 T ,再根 据 扇 区
号和 , 可 计算 出各 个 扇 区 的 零矢 量 和相 邻矢 量 的 电 压调 制 时间 ,各扇 区相邻 矢量 的调 制时 间如 表 2所示 。
表 2 各 扇 区相 邻 矢量的 调制 时 间
N 1 Z Y 2 Y - X 3 —Z X 4 — X Z 5 X — Y 6 Y Z
囊 用啊 啵形 麝腻 P 嬲f 靛鼯
3 结论
本文首先分析 了 S V P W M波 的 产 生 方 法 ,然 后 通 过
J l 厂]
——1
L l V
厂] 厂]
恤 j L
J t . . ~
S i m u l i n k仿 真 验 证 了 S V P W M波 产 生 方 法 的正 确 性和 可 行性 。
n
厂] 厂——] 厂] …
厂]
V
厂] n 厂——]
}
m J 厂]
厂——] L Ⅵ 厂 1 一 — 厂 ~ —Z 一 一
参 考文 献
[ 1 】 龚勇 . 基- T - - S V P W M  ̄交 流永 磁 同 步 电机 控 制技 术 的研 究 [ D ] . 苏州 :苏 州 大学 ,2 0 1 5 .
式 ( 1 )所 示 。 A:s i g n ( u 口 ) B=s i g n ( n / 3 u 一“ 口 ) ( 1 )
基于FPGA的三相SPWM控制器的设计

基于FPGA的三相SPWM控制器的设计黄玉健;甘国妹;黄永庆【摘要】研究者基于FPGA设计了一种三相SPWM控制器,该设计器以Altera公司的Cyclone III系列的EP3C25Q240C8芯片作为控制核心,结合直接数字频率合成技术(DDS),利用Verilog语言和LPM宏模块设计生成三相SPWM控制器.设计仿真结果以及用逻辑分析仪SignalTap II采样显示的结果表明,该三相SPWM控制器具有调制波频率、载波频率、调制度、载波比以及死区时间均可以灵活调节的优点,生成的三相SPWM波适应性强,可方便应用于逆变电源的变频调压以及电机变频调速等领域.【期刊名称】《玉林师范学院学报》【年(卷),期】2017(038)005【总页数】8页(P41-48)【关键词】三相SPWM控制器;FPGA;DDS【作者】黄玉健;甘国妹;黄永庆【作者单位】梧州学院图像处理与智能信息系统广西高校重点实验室,广西梧州543002;玉林师范学院电子与通信工程学院,广西玉林 537000;梧州学院图像处理与智能信息系统广西高校重点实验室,广西梧州 543002【正文语种】中文【中图分类】TN7411 引言PWM((Pulse Width Modulation)脉冲宽度调制技术是非常重要的电气控制技术,在高性能要求的电机变频调速、步进电机精细控制、变频调压电源、电力电子逆变控制等方面均有非常重要的应用[1]. 当进行脉冲宽度调制的时候,使系列脉冲的占空比按照正弦规则来排列,那么输出的信号经过D/A转换和滤波可以得到正弦波形的电压,就是正弦波脉冲宽度调制(Sinusoidal PWM),亦即SPWM[3]. 相比于其他方式的脉冲宽度调制,诸如空间矢量PWM、随机采样PWM、电流滞环PWM、自然采样PWM、等面积采样PWM或规则采样PWM 等,SPWM在电气控制技术等应用中,产生的谐波成分最小,所以应用也最广泛[1]. 在交流电机变频调速和逆变电源的变频调压等领域,SPWM控制技术已经得到非常广泛的应用.目前有多种能够产生SPWM脉宽调制波的方法,常用的方法中,一种是典型的传统的方法,即利用模拟电路对正弦调制波与三角载波进行比较来产生SPWM脉冲. 该种设计电路复杂,难以与数字系统连接,对于复杂要求很难满足;另一种是使用具有生成PWM波的专用芯片,如TI公司的DSP芯片TMS320F240和TMS320F2812等,该种方法也是数字化设计,但通常不够灵活,比如只能产生6路或12路的PWM信号[3]. 而基于FPGA的方法设计产生SPWM脉宽调制波,暨可以利用FPGA并发执行的速度优势来实现实时生成SPWM波形,也可以利用FPGA半定制电路的特点来实现快速灵活的硬件编程[2],使产生的SPWM波形具有调制波频率、载波频率、调制度、载波比以及死区时间均可以根据需要灵活调节的优点.本文的组织结构如下:第2节对SPWM产生技术原理、基于FPGA的数字直接频率合成(DDS)信号发生器产生调制波的正弦波技术原理进行理论分析;第3节应用FPGA内部丰富的半定制逻辑电路,根据技术原理设计出DDS三相正弦信号发生器、三角波发生器、幅度控制器、比较器以及死区控制电路;第四节对设计出来的三相SPWM控制器进行仿真和输出波形分析. 第5节对本文进行总结.2 基于FPGA的三相SPWM控制器设计原理2.1 SPWM波形产生技术原理图1 SPWM波生成原理图图1是SPWM波生成原理图,图1上方等腰三角波是载波,正弦波是调制波. 用数字方式生成SPWM波形原理是,先把载波等腰三角波和调制波正弦波均用数字方式产生,然后这两路数字波形信号通过一个数字比较器进行比较,如果三角波大于正弦波,则比较器输出0,反之,如果正弦波大于三角波,则比较器输出1.图1下方输出的脉冲波形就是产生的SPWM波形.从上述SPWM波形产生技术原理中知道,要产生三相SPWM波形,就必须要先生成三相调制波正弦波和载波三角波. 然后分别让三相正弦波和三角波通过比较器,按SPWM波生成原理输出相应的三个SPWM波形,就可以得到三相SPWM波形. 图2就是三相SPWM控制器电路模块图[1].图2中有5个部分构成,分别是DDS正弦波发生模块、三角波发生模块、幅度控制模块、比较器模块以及死区控制模块. 下面介绍这5个模块的作用.DDS正弦波发生模块主要是用来产生三相调制波正弦波,分别是0°正弦波、120°正弦波和240°正弦波.该模块也产生三角波发生模块所需的时钟信号tri_CLK,其实就是按DDS原理产生的一个方波信号. 该模块产生的另外一个时钟信号D_CLK是频率两倍于系统时钟信号CLK0频率的一个时钟信号,用来作为死区控制模块的系统时钟.图2 三相SPWM控制器电路模块图三角波发生模块就是用来产生载波三角波,在三角波的数据位已经确定的情况下,其频率由时钟信号tri_CLK的频率来决定,这可以通过DDS正弦波发生模块内部相对应的频率控制字来调节,也可以通过对应的频率控制字来调节三角波频率和三相正弦波频率的变化关系来决定是同步调制还是异步调制. 这里涉及一个参数是载波比,是指载波三角波频率ftri和调制波正弦波的频率fsin的比值,记为Kf,即理论上载波比越大输出精度也越高,也就是输出SPWM波形通过IGBT硬件电路后还原为正弦波的精度越高,但过大的载波比也要求IGBT的开关频率极高,导致开关管高功率损耗,甚至于无法满足过高的开关频率. 所以,载波比的选择要针对实际需要并结合具体的IGBT器件性能来选择. 通过改变DDS正弦波发生模块内部相对应的频率控制字,可以灵活调节正弦波和三角波的频率,进而调节载波比. 幅度控制模块的作用是用来调节正弦波和三角波的相对幅值度. 因为要灵活改变输出SPWM波形的调制度,就得通过改变正弦波和三角波的相对幅值大小来实现. 调制度,是指调制波正弦波的幅值Vsin和载波三角波幅值Vtri的比值[5],记为KA,即一般上,调制度KA的范围在0到1之间,实际的范围通常还要小. 如果KA>1,则称为过调制. 调制度反映了载波的幅度受低频调制信号控制的程度. 在应用SPWM设计的变频电源中,通过更改调制度KA可以方便的调节输出电压. 而在本设计中,可以通过改变正弦波的幅值系数AML_sin和三角波的幅值系数AML_tri 来实现调制度KA的灵活调节.比较器模块的作用,就是通过输入调整幅值之后的三相正弦波和三角波,通过比较器,按照SPWM生成原理来生成输出三相SPWM波形,分别为SPWM_A、SPWM_B和SPWM_C.死区控制模块是为了保护IGBT,防止上下桥臂同时导通而烧毁IGBT器件. 每一相SPMW波形控制一对IGBT器件,SPWM信号和SPWM相反状态的信号各控制一个,通过延迟上升沿变化信号的变化时间来防止这一对IGBT同时导通,设置的延迟时间就称为死区时间. 为了得到更精确的死区时间,死区控制模块的时钟D_CLK为系统时钟CLK0的两倍,通过锁相环技术得到. 本设计中,系统时钟CLK0为50MHz,D_CLK为100MHz.2.2 基于FPGA的DDS正弦波生成原理[6]图3 DDS结构原理图图3为基于FPGA的DDS正弦波生成结构原理图. 它的典型结构主要由相位累加器、相位调制器、正弦ROM查找表和DA转换器以及低通滤波器构成. 由于本设计的最终目的不是生成正弦波,生成数字化正弦波后还要结合数字化三角波最终生成SPWM波形,设计中整个过程都是数字化设计,所以图3中不需要DA转换器以及低通滤波器.在图3中,相位累加器是DDS波形信号发生器的核心,功能是完成信号的相位累加功能. 相位调制器的作用是对相位累加器的输出信号进行相位调制. 正弦波ROM 查找表的功能是完成一个周期离散正弦数据查表的转换,相位调制器的输出就是ROM的地址值,根据地址值找到相应的离散正弦数据,输出一个周期的离散正弦波数据就得到一个周期的数字化正弦波.根据DDS原理,输出正弦波的频率为[7]:式(3)中,fclk是系统基准时钟clk的频率,N是相位累加器的数据位宽度,B 是频率控制字,也称频率输入字. 在硬件已经确定,也就是fclk和N都已经设计定型的情况下,输出频率值就由当时输入的频率控制字B来确定. 而且频率控制字B的数据位宽度也是N.而对于DDS系统输出正弦波的频率分辨率Δf,即俗称输出频率最小步进值,就是频率控制字B步进一个最小间隔,亦即B=1对应的频率输出值. 由公式(3)得到:由公式(3)和公式(4)可知,只要基准频率fclk足够高频足够稳定,同时N足够大,利用DDS技术,可以实现输出任意频率和任意精度的正弦信号波形[4],而同在FPAG中利用锁相环技术,fclk实现高频高稳定基准时钟功能是很容易的,因而输出的正弦波的频率范围和精度要求都容易得到满足.3 基于FPGA的三相SPWM控制器设计3.1 DDS正弦波发生模块设计本设计依托的FPGA芯片是Altera公司的Cyclone III 系列的EP3C25Q240C8芯片. 根据图3 DDS正弦波结构原理图,可以得到本设计所需的基于FPAG的DDS三相正弦波发生模块设计电路图,如图4所示,系统时钟CLK为来自晶振的50MHz时钟信号.图4 DDS三相正弦波发生模块设计电路图图4中ADDER32是32位加法器,DFF32是32位寄存器,两者共同构成32位相位累加器. 正弦波ROM查找表分别由sin_rom01、sin_rom120和sin_rom240三个模块构成,它们的地址宽度和数据宽度均是10位,分别用来产生0°、120°和240°的正弦波. fangbo_rom是方波rom查找表,用来产生方波,地址宽度和数据宽度也都是10位. 由于产生的方波是作为产生载波三角波的驱动时钟信号,为了后续设置SPWM波的载波比和输出频率,在正弦波的频率字和方波频率字之间放置一个乘法器模块tra_sin_bilv. 乘法器的一个输入是正弦波频率字,另外一个输入是系数,输出的低32位作为方波的频率字. 由于三角波发生模块的地址宽度和数据宽度也都是10位,假设该系数为M,则M和载波比Kf的关系为:图4中PLL4M模块是锁相环模块,用来输出两个时钟信号,C0输出频率100MHz,用来作为死区控制模块的系统时钟. C1输出频率为10KHz,用来作为逻辑分析仪SignalTap II的时钟信号.图5是图4设计电路输出的三相正弦波以及方波在逻辑分析仪SignalTap II显示的波形,其中三相正弦波sin0、sin120和sin240分别是0°、120°和240°的正弦波,频率为50Hz. 方波TRA_CLK频率为1.024MHz.图5 DDS三相正弦波发生模块输出三相正弦信号和方波信号SignalTap II实时数据采样波形图根据式(3),图5中的正弦波频率可以通过改变正弦波输入频率字方式实现. 根据式(5),在确定载波比的情况下,通过改变乘法器输入系数M,可以改变输出方波的频率.3.2 三角波发生模块设计由于载波三角波是等腰三角形,所以可以利用地址计数器前半段的地址值作为等腰三角形的上升边,地址计数器后半段的地址值的取反值作为等腰三角形的下降边. 本设计的三角波发生器地址宽度和数据宽度也均是10位,因此三角波的计数器也是10位. 图6是三角波发生模块的设计电路图,其中counter10B模块是10位地址计数器,sanjiao模块是三角波发生模块.图6 三角波发生模块设计电路图3.3 死区控制模块设计幅度控制模块可以直接调用LPM中的宏模块乘法器,比较器模块也是可以直接调用LPM中的宏模块比较器. 这小节重点阐述死区控制模块设计.由2.1中死区控制模块的功能与原理可知,死区控制模块就是要实现对每一相SPWM波形控制的一对IGBT不能同时导通. 由于IGBT器件从导通到关断的过程中有时间延迟,因此防止同一个SPWM波形控制的一对上下桥臂IGBT同时导通的方法,是当一个IGBT从导通转变为关断时,对另外一个IGBT器件人为设置延长从关断到导通的过渡时间. 反映到SPWM波形,就是凡是上升沿的时刻都根据需要延迟其跳变时间,延迟的具体时间根据IGBT的性能指标来决定.图7 死区控制模块设计电路图图7是死区控制模块设计电路图. 其中SPWM_IN是输入的一相SPWM波,d_clk0是接DDS三相正弦波发生器模块输出的100MHz时钟信号. SIQU_CTRO是控制单个IGBT的死区控制电路. 输出out_H和out_L是经过死区控制之后的SPMW波形,分别控制一对IGBT的上下桥臂. 死区控制延迟时间可通过改变SIQU_CTRO电路里的参数来调节.4 基于FPGA的三相SPWM控制器顶层电路设计及输出波形分析4.1 基于FPGA的三相SPWM控制器顶层电路设计根据图2 三相SPWM控制器电路模块图和第3节各个子模块的设计电路图,可以得到基于FPGA的三相SPWM控制器顶层电路设计图,如图8所示.图8 基于FPGA的三相SPWM控制器顶层电路图图8中左边的clk0是系统总的输入系统时钟,频率为50MHz. DDS_ES是DDS三相正弦波发生模块,tra3是三角波发生模块. 四个AM_CTRO是乘法器,作为是幅度控制模块,M_tra[4..0]是三角波幅度控制系数,M_sin[4..0]是正弦波幅度控制系数. 由于产生的正弦波和三角波的数据位宽同样都是10位,根据式(2)可得调制度KA的具体表达式为:从式(6)可知,通过设置M_sin[4..0]和M_tra[4..0]可以灵活调节输出SPWM波形的调制度.CMP_10和CMP都是比较器模块,其输入是三角波和正弦波,输出是SPWM波. 其中CMP_10是10位比较器,CMP是14位比较器,后者是产生经过幅度控制的SPWM波形,前者是产生没有经过幅度控制的一路SPWM波形,是为了验证没有调制的SPWM波形和调制度小于1的SPWM波形的区别而设置的.4.2 输出波形分析图9是输出的三相SPWM波形SignalTap II实时数据采样波形图.图9 SPWM波形SignalTap II实时数据采样波形图图9中SPWM_A0是没有经过调制的A相SPWM波形,SPWM_A、SPWM_B和SPWM_C是调制度为90%的A、B、C三相SPWM波形. 其中产生SPWM_A和SPWM_A0两个波形的调制波是一样的,也就是用相同的0°正弦波作为调制波,不同的地方是产生SPWM_A的波形的调制度是90%,而产生SPWM_A0的波形的载波和调制波都没有经过幅度控制,调制度是100%. 在图9中可以明显看出两种波形SPWM_A0和SPWM_A的区别.图10 死区控制电路输入输出波形仿真图图8顶层电路图中SIQU_KONGZHI是死区控制模块,每个SIQU_KONGZHI模块输出上下桥臂一对IGBT器件所需的SPWM控制信号. 图10是死区控制电路输入输出波形仿真图,其中SPWM_A是A相SPWM波形,也是A相死区控制电路的输入SPWM波形,SPWM_AH和SPWM_AL分别是A相死区控制电路输出控制上桥臂和下桥臂的SPWM波形,SPWM_BH和SPWM_BL分别是B相死区控制电路输出控制上桥臂和下桥臂的SPWM波形.限于仿真图的大小,图10中没有给出C相死区控制电路输出控制上桥臂和下桥臂的SPWM波形. 从图10中可以看出SPWM_AH上升沿明显延迟于SPWM_AL的下降沿,也就是中间错开了一段死区时间. SPWM_BH上升沿也明显延迟于SPWM_AL的下降沿.图11 输出频率50Hz载波比20调制度90% 的三相SPWM波SignalTap II实时数据采样波形图图12 输出频率40Hz载波比15调制度85% 的三相SPWM波SignalTap II实时数据采样波形图图11和图12分别是输出频率50Hz载波比20调制度90% 和输出频率40Hz载波比15调制度85%的三相SPWM波SignalTap II实时数据采样波形图,均是经过死区控制输出的三相6路SPWM波形,满足了输出频率、调制度、载波比以及死区时间均可以灵活调节的设计目的.5 总结本文基于Altera公司的Cyclone III 系列的EP3C25Q240C8 FPGA芯片作为控制核心,结合直接数字频率合成技术(DDS),利用Verilog语言和LPM宏模块设计生成三相SPWM控制器. 设计仿真以及用逻辑分析仪SignalTap II采样显示的结果表明,该三相SPWM控制器具有调制波频率、载波频率、调制度、载波比以及死区时间均可以灵活调节的优点,达到了设计的目的. 该控制器可方便应用于逆变电源的变频调压以及电机变频调速等电气控制领域. ■【参考文献】[1]潘松,黄继业,潘明.EDA技术实用教程—Verilog HDL版(第5版)[M].北京:科学出版社,2013:354-356.[2]潘健,张小磊,张伯顺,王淑青.基于FPGA 的SPWM 变频调压电源研究[J].电源技术研究与设计,2015,39(2):386-388.[3]丁卫东,郭前岗,周西峰.一种基于FPGA的SPWM波的实时生成方法[J].计算机技术与发展,2011,22(2):211-214.[4]廖磊,何魏,周晓林.单片机与FPGA实训教程[M].北京:科学出版社,2016:310-317.[5]彭宏涛,基于FPGA的变频电源的设计与实现[D].昆明:云南大学.2012:7-9[6]黄继业,潘松.EDA技术及其创新实践(Verilog HDL版)[M].北京:电子工业出版社,2012:123-126.[7]黄玉健,黄永庆.基于FPAG的DDS多功能信号发生器的设计[J].梧州学院学报,2017,27(3):10-16.。
基于MATLAB的脉宽调制(PWM,SPWM,SVPWM)
第1章绪论1.1 脉宽调制技术的研究背景——电气传动的发展随着电力电子技术、微处理器技术的发展以及材料技术尤其是永磁材料技术的进步,电气传动系统,包括交、直流电动机调速及伺服系统,正在向系统高性能、控制数字化、一体化机电的方向发展。
直流传动系统控制简单、调速特性好,一直是调速传动领域中的重要组成部分。
现代的直流传动系统的发展方向是电动机主极永磁化及换向无刷化,而无刷直流电动机正是在这样的趋势下所发展起来的机电一体化电动机系统。
一般意义上的无刷直流电动机(Bruhless DC Motor,BLDCM)是指方波无刷直流电动机,其特征是只需简单的开关位置信号即可通过逆变桥驱动永磁电动机工作。
1975年无刷直流电动机首次出现在NASA报告中。
之后,由于高性能、低成本的第三代永磁材料的出现,以及大功率、全控型功率器件的出现,使无刷直流电动机系统获得了迅速的发展。
1977年,出现了采用钐钻永磁材料的无刷直流电动机。
之后不久,无刷直流电动机系统开始广泛采用高磁能积、高矫顽力、低成本的第三代NdFeB永磁材料,且采用霍尔元件作位置传感器,采用三相全桥驱动方式,以提高输出转矩,使其更加实用。
1986年,H.R.Bolton对方波无刷直流电动机系统进行了全面的总结,这标志着方波无刷直流电动机系统在理论上、驱动控制方法上已基本成熟。
近年来,虽然永磁直流电动机也随着永磁材料技术的发展而得到了性能的提高,依然在直流传动系统中被广泛应用,但直流传动系统已经处于无刷直流电动机大规模普及与应用的阶段。
现代交流传动系统已经由感应电动机为主发展为多机种,尤其是以永磁同步电动机的发展最为显著。
一方面,由感应电动机构成的交流调速系统性能依然不断提高,变压变频(VVVF)技术及矢量控制技术完全成熟。
通过模仿直流电动机中转矩控制的思路,采用坐标变换,把交流感应电动机的定子电流分解成励磁分量和转矩分量,并通过对磁通和转矩的独立控制、使感应电动机获得类似直流电动机的控制特性。
基于FPGA的步进电机SPWM细分驱动系统的设计
1 S P W M细 分 驱 动 原 理
步 进 电机 细 分 驱动 通 常 分 为 等 电 流 细 分 驱 动 法 和 电流 矢 量 恒 幅 均 匀 旋 转 法 。对 于 等 电流 细 分
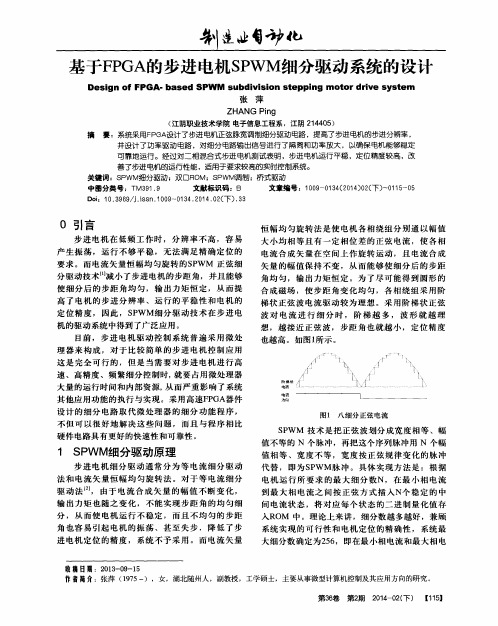
代 替 ,即 为 S P WM 脉 冲 。具 体 实现 方法 是 :根 据
电 机 运 行 所 要 求 的 最 大 细 分 数 N,在 最 小 相 电流 到 最 大 相 电流 之 间 按 正 弦 方 式 插 入 N个 稳 定 的 中 间 电 流 状 态 ,将 对 应 每个 状 态 的二 进 制 量 化 值 存 入R OM 中 。理 论 上 来讲 ,细分数 越 多越好 ,兼顾 系 统 实现 的可 行 性 和 电机 定位 的精 确 性 , 系统 最
第3 6 卷
第2 期 2 0 1 4 — 0 2 ( 下) 【 1 1 5 1
l
流之 间 划分 为 2 5 6 个 正 弦 电流 值 ,一 个正 弦 周 期共
定 位 精 度 ,因 此 ,S P W M细 分 驱 动 技 术 在 步 进 电
机 的驱动 系统 中得到 了广 泛 应用 。 目前 ,步 进 电机 驱 动 制 系 统 普 遍 采 用 微 处
波 对 电 流 进 行 细 分 时 ,阶 梯 越 多 , 波 形 就 越 理
想 ,越 接近 正 弦 波 , 步距 角也 就 越 小 ,定 位 精 度
( 江阴职 业技术学院 电子信 息工程系 ,江阴 2 1 4 4 0 5 ) 摘 要 :系统采用F P G A设计 了步进 电机正弦脉宽调制细分驱 动电路 ,提高 了步进 电机 的步进分辨率 ,
并设计 了功率驱 动 电路 ,对细分 电路输 出信 号进行 了隔离和 功率放大 ,以确保 电机 能够 稳定 可靠地 运行。经过 对二 相混合式 步进 电机测 试表 明 ,步进 电机 运行平 稳 ,定位 精度较 高 ,改 善 了步进 电机的运行性 能,适 用于 要求较高的实时控制系统。 关键词 :S P WM 细分驱 动 ; 双 口R O M;S P WM 调制 ;桥式驱动 中囝分类号 :T M3 9 1 . 9 文献标识码 :B 文章编号 :1 0 0 9 —0 1 3 4 ( 2 0 1 4 ) 0 2 ( 下) 一 0 1 1 5 —0 5
基于FPGA的SPWM实现研究

—
弦电压。图4为信号 ot 滤波后的示波器波形图, u l
频率 为 2 . H 。 5 1 z
o t u u2 n g; u p to t e
一
o p to t utu u3
_
ng/ 输 出三相六 路 P e ;/ WM 信号
//八一 , 一 、 7 , ; … l 卜
e e& < 4 2一C P 1 M R )
o t = 1; ul e s ut le o l=0;
出信号 ot 及其反相信号 ot ng ul ul e 的占空 比在逐 — 渐发 生变换 , 他两 路也有 相 同的变化 。 其
值 。依据 此 比较值 可 以确 定输 出电压有效 的时 间长
度 , 占空 比大小 。 即 C P 1 13 t ) 2 M R =(4 2一 。 / 式 中 13 4 2为一 个 载波 周 期所 占的晶 振 时钟 周 期 数 目。 同样 的方 法 可 以求 出另 外 两 相 的 比较 值
¨l Il… l ll l ll … lli Il l Il l 1I … l lI II ll
O t u3
_
O t ng u l e
_
3 6 顶层 调用模块 .
舢 帅 ‘ m n ㈣ llII 舢 唧m m n ]l l l I O t ng u2 e mW lIl l I 『几几几f 兀 IJ lj ln] 几门硎 舢1 】 j 几 1 l r 几 f
则总 的导通时 间为 : £ +。 :t t 以。其 他 两相 的 导通时 间计 算相 同。 3 4 比较 值计算模块 . 根 据导 通时 间 , 出在一 个 载波 周期 中的 比较 求
Matlab中的波形生成和处理方法

Matlab中的波形生成和处理方法一、导言在科学研究和工程领域中,波形的生成和处理是一项非常重要的任务。
波形可以用于信号处理、图像处理、音频处理等各个领域。
Matlab作为一种强大的数值计算软件,提供了丰富的波形生成和处理功能。
本文将探讨Matlab中常用的波形生成和处理方法,以帮助读者更好地应用Matlab进行波形探索和应用。
二、波形生成1. 正弦波生成正弦波是最常见的波形之一。
在Matlab中,可以使用sin函数生成正弦波,其基本形式为:```t = 0:0.1:10; % 时间范围f = 1; % 频率A = 1; % 振幅y = A*sin(2*pi*f*t);```其中,t表示时间范围,f表示频率,A表示振幅。
可以通过修改t、f和A的值来调整生成的正弦波。
2. 方波生成方波是另一种常见的波形。
在Matlab中,可以使用square函数生成方波,其基本形式为:```t = 0:0.1:10; % 时间范围f = 1; % 频率duty = 50; % 占空比y = square(2*pi*f*t, duty);```其中,t表示时间范围,f表示频率,duty表示占空比。
可以通过修改t、f和duty的值来调整生成的方波。
3. 噪声波形生成噪声波形在信号处理和通信系统中起着重要的作用。
在Matlab中,可以使用rand或randn函数生成随机噪声波形,其基本形式为:```t = 0:0.1:10; % 时间范围y = rand(size(t)); % 随机噪声波形```或```t = 0:0.1:10; % 时间范围y = randn(size(t)); % 高斯噪声波形```其中,t表示时间范围,size(t)表示与时间范围相同大小的随机噪声序列。
三、波形处理1. 基本运算在Matlab中,可以对波形进行基本的运算,如加法、减法、乘法和除法。
例如,将两个波形相加:```t = 0:0.1:10; % 时间范围f1 = 1; % 振荡频率1f2 = 2; % 振荡频率2A = 1; % 振幅y1 = A*sin(2*pi*f1*t);y2 = A*sin(2*pi*f2*t);y = y1 + y2; % 两个波形相加```通过对波形进行加法、减法、乘法和除法等运算,可以实现波形的叠加、相减、调制和解调等处理。
SPWM的FPGA实现方法

- 146 - 360元 / 年 邮局订阅号: 82-946
《 现场总线技术应用 200 例》
您的论文得到两院院士关注
P LD CP LD FP GA 应 用
Ugt的极性得出电压及频率的指令信号, 经 SPWM 生 成环节形成控制逆变器的 SPWM 信号, 再经驱动电路 控制变频器中 IGBT 的通断, 使变频器输出所需频率、 相序和大小的交流电压, 从而控制交流电机的转速和 转向, 作为重点将在后面详细介绍 SPWM 生成原理。 具体见图 1 系统框图
end s_a;
2.2.3 SPWM 脉宽调制波的产生
将 FPGA 生成的正弦波和三角波的进行数字量进
行比较, 其中三角波是正弦波频率的若干倍。利用三
相正弦波调试三角波, 在把比较后的三路波形反相,
生成 6 路调制波。软件语言如下:
port(in1:std_logic_vector(7 downto 0);- - 正 弦 波 数
期的地址, 改变 finput 的输入频率就可改变计数器高十位 的输出频率, 最终达到改变输出频率的目的。变频调速
装置需要产生出三个相位彼此互差 120 的 SPWM 脉冲
双极性SPWM波形开关点计算及其FPGA实现

Ca c lto fOn— f wic ng Po n so poa lu a i n o o S t hi i t fBi l r SPW M a e W v a aia in O PW M s d o nd Re l to fS z Ba e n FPGA
U i r t, i n7 0 3 , hn ) n e i X ' 10 8 C i v sy a a
Ab tac :Ac o d n o t e p i c pe o h au e s mpl g me h d o PW M 。a meh d wa r s n e — sr t c r i g t h rn i l ft e n tr a i t o fS n t o s p e e t d a b u h e l ain o PW M v a e n FPGA n t b.Th a ao n. f wic i g p o t r a o tt e ra i to fS z wa e b s d o a d Mal a e d t fo o s th n in swe ec u. c l td ofi e frt Th n te c u t rwa s d t r n l t he e d t nt he n mb ro h u s s u ae f n s. l i e h o n e su e o ta sa et s a a i o t u e ft e p le .wh c ih wa s d t o to h e e rg e me to W M v su e o c nr lt e l v lti g rmo n fSP wa e.Mibaa e meh d wa p le n e s fcr s lnc t o sa p id i a e o i.
实验一MATLAB编程环境及常用信号的生成及波形仿真

实验⼀MATLAB编程环境及常⽤信号的⽣成及波形仿真实验⼀ MATLAB 编程环境及常⽤信号的⽣成及波形仿真⼀、实验⽬的1、学会运⽤Matlab 表⽰常⽤连续时间信号的⽅法2、观察并熟悉这些信号的波形和特性:3、实验内容:编程实现如下常⽤离散信号:单位脉冲序列,单位阶跃序列,矩形序列,实指数序列,正弦序列,复指数序列;⼆、实验原理及实例分析2、如何表⽰连续信号?从严格意义上讲,Matlab 数值计算的⽅法不能处理连续时间信号。
然⽽,可利⽤连续信号在等时间间隔点的取样值来近似表⽰连续信号,即当取样时间间隔⾜够⼩时,这些离散样值能被Matlab 处理,并且能较好地近似表⽰连续信号。
3、Matlab 提供了⼤量⽣成基本信号的函数。
如:(1)指数信号:K*exp(a*t)(2)正弦信号:K*sin(w*t+phi)和K*cos(w*t+phi)(3)复指数信号:K*exp((a+i*b)*t)(4)抽样信号:sin(t*pi)注意:在Matlab 中⽤与Sa(t)类似的sinc(t)函数表⽰,定义为:)t /()t (sin )t (sinc ππ=(5)矩形脉冲信号:rectpuls(t,width)(6)周期矩形脉冲信号:square(t,DUTY),其中DUTY 参数表⽰信号的占空⽐DUTY%,即在⼀个周期脉冲宽度(正值部分)与脉冲周期的⽐值。
占空⽐默认为0.5。
(7)三⾓波脉冲信号:tripuls(t, width, skew),其中skew 取值范围在-1~+1之间。
(8)周期三⾓波信号:sawtooth(t, width)(9)单位阶跃信号:y=(t>=0)常⽤的图形控制函数1)学习clc, dir(ls), help, clear, format,hold, clf控制命令的使⽤和M⽂件编辑/调试器使⽤操作;2)主函数函数的创建和⼦程序的调⽤;3)plot,subplot, grid on, figure, xlabel,ylabel,title,hold,title,Legend,绘图函数使⽤;axis([xmin,xmax,ymin,ymax]):图型显⽰区域控制函数,其中xmin为横轴的显⽰起点,xmax为横轴的显⽰终点,ymin为纵轴的显⽰起点,ymax为纵轴的显⽰终点。
MATLAB方法实现信号波形和微分方程的建立与求解实验报告

MATLAB方法实现信号波形和微分方程的建立与求解实验报告实验目的:1.熟悉MATLAB软件的基本使用方法;2.掌握信号波形的绘制;3.掌握微分方程的建立与求解。
实验仪器:-计算机-MATLAB软件实验原理:1.信号波形的绘制信号波形是指随时间变化的量的图示。
可以使用MATLAB软件实现信号波形的绘制。
MATLAB软件提供了丰富的绘图函数,如plot函数、stem 函数等,可以根据需要选择合适的函数进行波形绘制。
2.微分方程的建立与求解微分方程是描述自然现象中变化的数学模型。
可以通过MATLAB软件进行微分方程的建立与求解。
MATLAB提供了ode45函数等函数用于求解常微分方程。
实验步骤:1.信号波形的绘制首先,打开MATLAB软件,并创建一个新的脚本文件。
然后,在脚本文件中使用plot函数绘制一个正弦信号的波形。
代码示例如下:```t=0:0.1:10;%时间范围为0到10,步长为0.1y = sin(t); % 正弦信号plot(t, y); % 绘制波形图```保存脚本文件,点击“运行”按钮即可显示出正弦信号的波形图。
2.微分方程的建立与求解在同一个脚本文件中,可以进行微分方程的建立与求解。
首先,使用syms命令定义微分方程中的未知函数和其导数。
然后,使用dsolve命令求解微分方程。
最后,通过plot函数绘制微分方程的解的波形。
代码示例如下:```syms y(t)ode = diff(y, t) == y; % 定义微分方程ySol(t) = dsolve(ode); % 求解微分方程t=0:0.1:10;%时间范围为0到10,步长为0.1y = ySol(t); % 微分方程的解plot(t, y); % 绘制波形图```保存脚本文件,点击“运行”按钮即可显示出微分方程的解的波形图。
实验结果:根据实验步骤,在MATLAB软件中实现了信号波形的绘制和微分方程的建立与求解。
通过绘图函数,成功绘制出了正弦信号的波形和微分方程的解的波形。
采用MATLAB对SPWM进行辅助设计
采用MATLAB对SPWM进行辅助设计
1 概述
传统的SPWM 采用频率数倍于正弦波的三角波调制正弦波,可得到近似于
正弦波的输出。
三角波的频率越高,即载波比越高,谐波的频率就越高,输出
端滤波器就更容易去除谐波。
在输出频率固定的场合,如正弦波逆变电源,其
输出频率固定在50Hz 左右,这种场合采用软件设计可降低系统的成本,一般
将数据存入存储器,通过CPU 的定时器中断调用可完成SPWM 控制。
在变频
场合,如三相交流异步电机的驱动,由于需要输出三相变频的SPWM 信号,
一般采用8254 可编程定时器,以减少CPU 的工作量。
SPWM 设计采用传统方法得到的正弦波较理想,由于三角波是超越方程,正弦信号用单片机产生也较困难,因此,传统方法较难实现。
现在有许多新方法
产生,这些方法实现简单但对生成的正弦波影响不大,如对称规则采样法,双
缘调制法等。
MATLAB 是一个高级的数学分析与运算软件,具有强大的计算功能。
SPWM 控制通过MATLAB 进行分析和设计,可取得事半功倍的效果。
以下的分析若无特殊说明,均基于双极型调制,基频为50Hz 的SPWM 控制。
2SPWM 数据的计算
采用MATLAB 可方便地得到正弦波与三角波的交点。
在判断交点时,可通
过交点的数学定义来判断。
所谓交点,就是在交点附近时刻两函数之差值的绝
对值趋于0,而在交点附近的极小区域,离交点越远,差值的绝对值逐渐增大。
以下子程序为计算交点的MATLAB 程序。
x 为基波数据,y 为载波数据,m 为。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
当 载 波 比 为 整 数
采样法来 产生 S P WM 波形 , 波形 精度 不如 自然 采样法 , 不
适合用于谐波要求较高 的领域_ 3 ; 2 )使用专用芯片 , 该方 法利用专用 D D S芯 片产生 s P wM 波形 , 成本 和复 杂度较 高[ 5 ; 3 )使用可 编程逻辑器件 ( 如F P GA ) , 该方法原理 与 模拟 电路类似 , 只不过采用 的是 数字 电路 的方 式 , 在 F P G A
中实现 S P WM 控制 算法 l _ 7  ̄ 。该 方 法可 实现 多路 波形 输 出, 灵 活性 和精度 比 D S P方式 高 , 缺点 是 占用 F P GA资 源
较多 。
数输 出结果 。以产 生一 组单 相互 补对称 带死 区的 S P WM
Re a l i z a t i o n o f S P W M Wa v e Ba s e d o n Ma t l a b a n d FPGA
W A NG He ng LI Zo n g LI We nb i n TAN We i
( No . 7 2 2 Re s e a r c h & De v e l o p me n t I n s i t u t e o f C S I C.W u h a n 4 3 0 0 7 9 )
得一个 s P wM 波形周期 的离散数据 , 然后根据这些数据在 F P G A中直接生成 s P wM 波形 。该方法使得 F P G A的设 计工作大为简化 , 具有
较高的工程应用价值。
关键词 Ma t l a b ;F P G A;S P WM ; S I MUL I NK T P 3 9 1 . 9 D OI : 1 0 . 3 9 6 9 / j . i s s n 1 6 7 2 -9 7 3 0 . 2 0 1 3 . 0 7 . 0 1 9 中图 分 类 号
Cl a s s Nu mb e r TP3 9 1 . 9
1 引 言
正 弦脉 宽调 制( S P WM) 技术就是通 过不断改 变波形 的
高 电平 , 反 之 为低
电平_ g ] 。定义 正 弦 波与三角 波的 幅值 之比为调制度, 三 角波与正 弦波 的频
率 之 比为 载 波 比 ,
主 衡 李 纵 李文彬 谭 巍
4 3 0 0 7 9 ) ( 中国船舶重工集团公 司第七二二研究所 摘 要 武汉
介绍 了一种联合 Ma t l a b和 F P GA生成 s P wM 波形的方 法。首先在 Ma t l a b中搭建 S P WM 控制算 法的 S I MUL I NK模型 , 获
时, S P WM 波 形 将 满足周期性 , 周期与正 弦波周 期相 同。本 文所讨 论 的实现 方法仅 限于周期 性 的 S P WM 波 形 , 即载波 比为整 数 的情WM 波形的基本思路是先 由 Ma d a h产生 个周期 的 S P WM 离散数据 , 再由F P G A进行周期循环计 波形 为例 , 实现过程如 图 2所示 , 分 两个步 骤进 行设计 : 1 )
总第 2 2 9 期 2 0 1 3 年第 7 期
舰 船 电 子 工 程
S h i p El e c t r o n i c E n g i n e e r i n g
Vo 1 . 3 3 No . 7
49
基 于 Ma t l a b和 F P G A的 S P W M 波 形 的 实 现
图1 S P W M 基 本 原 理
占空比 , 使脉 冲的宽度 按照正 弦波规 律变 化 的一 种控 制算 法[ “, 广泛应用 于变 频器 、 逆变器及 电机调速 系统 中E z 3 。
目前实 现 S P WM 波 形 的方 法 主要 有 三 种 : 1 )使 用 D s P ( 如 TI 公司的 T MS 3 2 0 F 2 4 0 、 T MS 3 2 0 F 2 8 1 2等) , 该方 法只能产生 6路或 1 2 路 S P WM 波形 , 由于运 用 的是规则
Abs t r a c t A me t h o d o f g e ne r a t i n g S PW M wa v e b a s e d o n Ma t l a b a n d F PGA i s i nt r o d u c e d . Fi r s t ,a SI M U LI NK mo d e l o f S PW M c o n — t r o l l i n g p r o c e s s i s bu i l t i n Ma t l a b t o g e t d i s c r e t e S PW M da t e s o f o n e c y c l e .Th e n.S PW M wa v e i s g e n e r a t e d d i r e c t l y i n FPGA a c c o r d i n g t o t h e d a t e s .Th e me t h o d r e d u c e s t h e d e s i g n wo r k o f FPGA a n d i s o f g r e a t e n g i n e e r i n g a p p l i c a t i o n v a l u e . K e y W or d s Ma t l a h,FP GA ,S PW M ,S I M U LI NK