6.数值积分法仿真
仿真算法知识点总结

仿真算法知识点总结一、简介仿真算法是一种通过生成模型和运行模拟来研究系统或过程的方法。
它是一种用计算机模拟真实世界事件的技术,可以用来解决各种问题,包括工程、商业和科学领域的问题。
仿真算法可以帮助研究人员更好地理解系统的行为,并预测系统未来的发展趋势。
本文将对仿真算法的基本原理、常用技术和应用领域进行总结,以期帮助读者更好地了解和应用仿真算法。
二、基本原理1. 离散事件仿真(DES)离散事件仿真是一种基于离散时间系统的仿真技术。
在离散事件仿真中,系统中的事件和状态都是离散的,而时间是连续变化的。
离散事件仿真通常用于建模和分析复杂系统,例如生产线、通信网络和交通系统等。
离散事件仿真模型可以用于分析系统的性能、验证系统的设计和决策支持等方面。
2. 连续仿真(CS)连续仿真是一种基于连续时间系统的仿真技术。
在连续仿真中,系统中的状态和事件都是连续的,而时间也是连续的。
连续仿真通常用于建模和分析动态系统,例如电力系统、控制系统和生态系统等。
连续仿真模型可以用于分析系统的稳定性、动态特性和系统参数的设计等方面。
3. 混合仿真(HS)混合仿真是一种同时兼具离散事件仿真和连续仿真特点的仿真技术。
混合仿真可以用于建模和分析同时包含离散和连续过程的系统,例如混合生产系统、供应链系统和环境系统等。
混合仿真模型可以用于分析系统的整体性能、协调离散和连续过程以及系统的优化设计等方面。
4. 随机仿真随机仿真是一种基于概率分布的仿真技术。
在随机仿真中,系统的状态和事件都是随机的,而时间也是随机的。
随机仿真通常用于建模和分析具有随机性质的系统,例如金融系统、天气系统和生物系统等。
随机仿真模型可以用于分析系统的风险、概率特性和对策选择等方面。
5. Agent-Based ModelingAgent-based modeling (ABM) is a simulation technique that focuses on simulating the actions and interactions of autonomous agents within a system. This approach is often used for modeling complex and decentralized systems, such as social networks, biologicalecosystems, and market economies. In ABM, individual agents are modeled with their own sets of rules, behaviors, and decision-making processes, and their interactions with other agents and the environment are simulated over time. ABM can be used to study the emergent behavior and dynamics of complex systems, and to explore the effects of different agent behaviors and interactions on system-level outcomes.三、常用技术1. Monte Carlo方法蒙特卡洛方法是一种基于随机模拟的数值计算技术。
机电系统仿真选择题
1、下列为比例环节的是 ( )A 、10;B 、1/(s+1);C 、1/s ;D 、s+1。
2、下列不是数字仿真所具有的优点的是( )A 、经济;B 、安全;C 、环保D 、快捷。
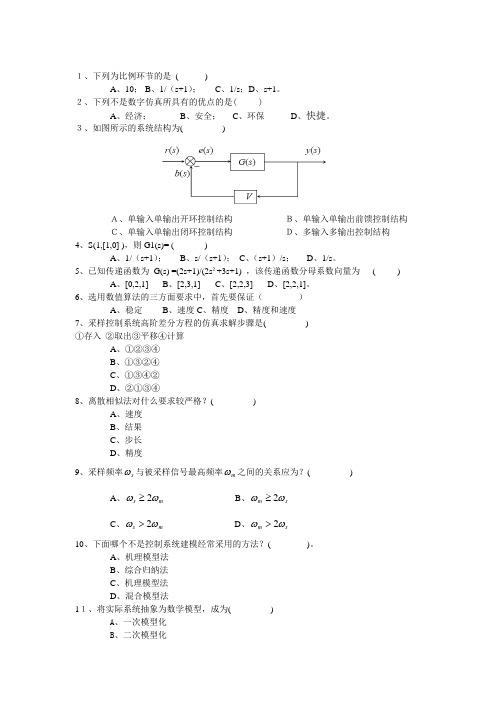
3、如图所示的系统结构为( )A、单输入单输出开环控制结构 B、单输入单输出前馈控制结构 C、单输入单输出闭环控制结构 D、多输入多输出控制结构4、S(1,[1,0] ),则G1(s)= ( )A 、1/(s+1);B 、s/(s+1);C 、(s+1)/s ;D 、1/s 。
5、已知传递函数为 G(s) =(2s+1)/(2s ²+3s+1) ,该传递函数分母系数向量为 ( )A 、[0,2,1]B 、[2,3,1]C 、[2,2,3]D 、[2,2,1]。
6、选用数值算法的三方面要求中,首先要保证( )A 、稳定B 、速度C 、精度D 、精度和速度7、采样控制系统高阶差分方程的仿真求解步骤是( )①存入 ②取出③平移④计算A 、①②③④B 、①③②④C 、①③④②D 、②①③④8、离散相似法对什么要求较严格?( )A 、速度B 、结果C 、步长D 、精度9、采样频率s ω与被采样信号最高频率m ω之间的关系应为?( )A 、m s ωω2≥B 、s m ωω2≥C 、m s ωω2>D 、s m ωω2>10、下面哪个不是控制系统建模经常采用的方法?( )。
A 、机理模型法B 、综合归纳法C 、机理模型法D 、混合模型法11、将实际系统抽象为数学模型,成为( )A 、一次模型化B 、二次模型化C、三次模型化D、四次模型化12、下列不属于模拟仿真优缺点的是( )A、描述连续的物理系统的动态过程比较自然而逼真B、仿真速度极快,失真小,结果可信度高C、受元器件性能的影响,仿真精度较低D、仿真实验的自动化程度较高13、下列不属于仿真系统具有的三种特性的是( )A、整体性B、相关性C、隶属性D、独立性14、控制系统常用的实验方法不包括:( )A、解析法B、实验法C、仿真实验法D、时域法15、下列不属于建立系统模型的内容的选项是:( )A、确定模型的结构,建立系统的约束条件B、将理论清晰、概念明确但很计算复杂的工作交给计算机C、测取有关的模型数据D、检测所建立的数字模型的正确性。
哈工大仿真技术及应用实验指导书

仿真技术及应用实验指导书目录前言 (I)目录 (II)实验项目 (2)实验1 利用替换法构建系统仿真模型实验 (2)1.1 实验目的 (2)1.2 实验内容与要求 (2)1.5 实验报告要求 (3)实验2 利用根匹配法构建系统仿真模型实验 (4)2.1 实验目的 (4)2.2实验内容与要求 (4)2.5实验报告要求 (5)实验3 利用数值积分算法的仿真实验 (6)3.1 实验目的 (6)3.2 实验内容与要求 (6)3.5实验报告要求 (7)实验四基于Simulink控制系统仿真与综合设计 (8)4.1实验目的 (8)4.2实验内容与要求 (8)4.5 实验报告要求 (9)实验五基于Simulink三相电路仿真 (10)5.1实验目的 (10)5.2实验内容与要求 (10)5.5 实验报告要求 (12)实验六基于Simulink的直流斩波电路仿真实验 (13)6.1实验目的 (13)6.2实验内容与要求 (14)6.5 实验报告要求 (15)实验七基于Simulink的简单电力系统仿真实验 (16)7.1实验目的 (16)7.2实验内容与要求 (16)7.5 实验报告要求 (17)实验8 基于Simulink的伺服系统仿真 (17)8.1实验目的 (17)8.2实验内容与要求 (18)实验项目实验1 利用替换法构建系统仿真模型实验1.1 实验目的1) 熟悉MATLAB 的工作环境;2) 掌握MATLAB 的 .M 文件编写规则,并在命令窗口调试和运行程序;3) 掌握利用替换法构造系统离散模型的方法,并对仿真结果进行分析。
1.2 实验内容与要求1.2.1 实验内容系统电路如图 1.1所示。
电路元件参数:直流电压源V E 1=,电阻Ω=10R ,电感H L 01.0=,电容F C μ1=。
电路元件初始值:电感电流A i L 0)0(=,电容电压V u c 0)0(=。
系统输出量为电容电压)(t u c 。
控制系统数字仿真 要点

词汇表1. 解析法:就是运用已经掌握的理论知识对控制系统进行理论上的分析、计算。
它是一种纯理论上的试验分析方法,在对系统的认识过程中具有普遍意义。
2. 实验法:对于已经建立的实际系统,利用各种仪器仪表及装置,对系统施加一定类型的信号,通过测取系统的响应来确定系统性能的方法。
3. 仿真分析法:就是在模型的基础上所进行的系统性能分析与研究的实验方法,它所遵循的基本原则是相似原理。
4. 模拟仿真:采用数学模型在计算机上进行的试验研究称之为模拟仿真。
5. 数字仿真:采用数学模型,在数字计算机上借助于数值计算的方法所进行的仿真试验称之为数字仿真。
6. 混合仿真:将模拟仿真和数字仿真结合起来的仿真方法。
7. 数值计算:有效使用数字计算机求数学问题近似解的方法与过程。
数值计算主要研究如何利用计算机更好的解决各种数学问题,包括连续系统离散化和离散形方程的求解,并考虑误差、收敛性和稳定性等问题。
8. 病态问题:闭环极点差异非常大的控制系统叫做病态系统,解决这类系统的问题就叫病态问题。
9. 显式算法:在多步法中,若计算第k+1次的值时,需要的各项数据均是已知的,那么这种算法就叫做显式算法。
10. 隐式算法:在多步法中,若计算第k+1次的值时,又需要用到第k+1次的值,即算式本身隐含着当前正要计算的量,那么这种算法就叫做隐式算法。
11. 数值稳定性:数值积分法求解微分方程,实质上是通过差分方程作为递推公式进行的。
在将微分方程离散为差分方程的过程中,有可能将原本稳定的系统变为不稳定系统。
如果某个数值计算方法的累积误差不随着计算时间无限增大,则这种数值方法是稳定的,反之是不稳定的。
12. 实体:就是存在于系统中的具有实际意义的物体。
13. 属性:就是实体所具有的任何有效特征。
14. 活动:系统内部发生的任何变化过程称之为内部活动;系统外部发生的对系统产生影响的任何变化过程称之为外部活动。
15. 描述模型:是一种抽象的、无实体的,不能或者很难用数学方法精确表示的,只能用语言描述的系统模型。
控制系统数字仿真模拟题
控制系统数字仿真模拟题一、填空题1、数值积分法中,计算精度p=2的是 梯形法2、 混合法 是机理模型法和统计模型法的结合3、柔性制造系统属于 离散事件 系统.4、零极点增益形式可用于分析系统的 稳定性 和 快速性5、 现实性 、 简洁性 、 适应性 是建立系统模型应该依照的原则.6、系统的三大要素为: 实体 、 属性 和活动。
7、通常仿真时多采用四阶龙格 库塔法 、其原因就是这种计算公式的截断误差较小.8、 相似论 是系统仿真的主要依据.9、一个电机转速控制系统中,属于电机所具有的属性的为: 电机转速10、我们在选择数值算法的时候要 考虑精度 、 计算速度 以及稳定性等原则进行.二、单选题1.运行下列命令后A1=[1,2,3;4,5,6;7,8,9];A2=A1;A3=cat(1,A1,A2),系统输出结果为( B )A.123147456258789369B.123456789147258369C.123456789D.147258369 2.设某一系统的状态方程矩阵为a=[-3,1;1,-3];b=[1,1;1,1];c=[1,1;1,-1];d=[0]并且执行后得可控性矩阵和可观性矩阵的秩分别为cam=ctrb(a ,b)=1,rcam=rank(cam)=2,因此这一系统为( D )A.不可控且不可观的系统B.可控且可观的系统C.可控但不可观的系统D.不可控但可观的系统3.可以将模块按照顺时针进行旋转的快捷键为( A )A.ctrl+rB.ctrl+yC.alt+rD.alt+y4.在Matlab 系统中,调用Simulink环境的工具栏图标为( A )A. B. C.5.下列符号中可以引导注释行的是( D )A.&B.@C.$D.%6.若A=412303214--⎡⎤⎢⎥-⎢⎥⎢⎥-⎣⎦,则C=(A>0)&(A<3)的结果为( B )A.001001011B.001000010C.111110110D.0011100107.MATLAB系统中若要使系统选择short和shortE中最好的表示,则采用命令( C )A.shortB.shortEC.shortGD.longE8.列出工作内存中的变量名称以及细节,只需在命令窗口输入( A )A.whatB.whoC.echoonD.whose9.设一个五阶魔方阵B=magic(5),提取B阵的第1行,第2行的第1,3,5个元素的命令为( B )A.B(1,2:[1,3,5])B.B([1:2],[1,3,5])C.B([1:2],1:3:5))D.B(1:2;[1,3,5])10.下列命令中可以创建起始值为0,增量值为0.5,终止值为10的等差数列的是( A )A.a=0:0.5:10B.a=linspace(0,10,0.5)C.linspace(0,10,10)D.logspace(0,1,11)11.若a=[102;300;130;111],则any(a)=( C )A.011B.110C.111D.10012.设s=‘haha’,可以看到字符s的ascii码值的命令为( C )A.size(s)B.isstr(s)C.abs(s)D.eval(s)13.PSPICE是( B )软件.A.模型及混合信号仿真软件B.模拟电路仿真软件C.机械系统动力学自动分析软件D.大型通用有限元分析软件14.将多项式2(22)(4)(1)s s s s++++展开的命令中正确的是( D )A.conv([1,2,2],conv([4,1],[1,1]))B.conv([2,2,1],conv([4,1],[1,1]))C.conv([2,2,1],conv([1,4],[1,1]))D.conv([1,2,2],conv([1,4],[1,1]))15.w=conv([1,2,3],conv([1,2],[1,1]))的值为( C )A.3111372B.2713113C.1511136D.151422219三、判断题1.影响系统而又不受系统直接控制的全部外界因素的集合叫外部活动.( 错)2.系统仿真就是建立系统的动态模型并在模型上进行实验(或试验).(对)3.状态方程是直接描述系统输入和输出量之间的制约关系,是连续控制系统其他数学模型表达式的基础.( 错)4.global可以定义全局变量,全局变量的作用域是该MATLAB函数的整个工作区,其他的函数不能对它们进行存取和修改( 错)5.MATLAB中clf用于清除图形窗口上的旧图形(对)6.控制系统的数学模型有状态空间表达式,微分方程和积分方程( 错)7.仿真就是利用模型(物理模型或数学模型)代替实际系统进行实验和研究(对)8.离散相似法采样周期的选择应该满足香农定理(采用定理)(对)9.通常情况下,模拟仿真较数字仿真精度高( 错)10.机理模型法需要对系统的内部结构和特性完全的了解,但其精度较低( 错)11.绘制系统根轨迹的命令式是rlocus(对)12.仿真所遵循的基本原理是相似原理,即几何相似和数学相似(对)13.在MATLAB中,plot命令用于绘制三维图形( 错)14.绘制系统单位阶跃响应曲线的命令是step(对)15.系统仿真有三个基本的活动是模型建立,模型变换和模拟实验( 错)16.机理模型法就是对已知结构,参数的物理系统运用相应的物理定律或定理,经过合理的分析简化建立起来的各物理量间的关系(对)17.欧拉法的计算精度p=3( 错)18.绘制系统单位脉冲响应曲线的命令是implus(对)19.MATLAB的含义为矩阵实验室(对)20.margin(G)的含义是计算系统的相角裕度和幅值裕度(对)四、问答题:1.什么是仿真?它的主要优点是什么?它所遵循的基本原则是什么?[答案]:系统仿真是以相似原理,系统技术,信息技术及其应用领域有关的专业技术为基础,以计算机和各种专用物理效应设备为工具,利用系统模型对真实的或设想的系统进行动态研究的一门多学科的综合性技术.它是非常重要的设计自动控制系统或者评价系统性能和功能的一种技术手段.仿真的主要优点是:方便快捷,成本低廉,工作效率和计算精度都很高.它所遵循的基本原则是相似性原理.2.控制系统CAD可解决那些问题?[答案]:控制系统CAD可以解决以频域法为主要内容的经典控制理论和以时域法为主要内容的现代控制理论.此外,自适应控制,自校正控制以及最优控制等现代控制测略都可利用CAD 技术实现有效的分析与设计.3.控制系统建模的基本方法有哪些?他们的区别和特点是什么?[答案]:控制系统的建模方法大体有三种:机理模型法,统计模型法和混合模型法.机理模型法就是对已知结构,参数的物理系统运用相应的物理定律或定理,经过合理的分析简化建立起来的各物理量间的关系.该方法需要对系统的内部结构和特性完全的了解,精度高.统计模型法是采用归纳的方法,根据系统实测的数据,运用统计规律和系统辨识等理论建立的系统模型.该方法建立的数学模型受数据量不充分,数据精度不一致,数据处理方法的不完善,很难在精度上达到更高的要求.混合法是上述两种方法的结合.4.什么是离散系统?什么是离散事件系统?如何用数学的方法描述它们?[答案]:本课程所讲的”离散系统”指的是离散时间系统,即系统中状态变量的变化仅发生在一组离散时刻上的系统.它一般采用差分方程,离散状态方程和脉冲传递函数来描述.离散事件系统是系统中状态变量的改变是由离散时刻上所发生的事件所驱动的系统.这种系统的输入输出是随机发生的,一般采用概率模型来描述.5.动态系统仿真中常用的数值算法有哪几类,分别是什么?[答案]:主要有求解线性和非线性微分方程的数值积分法和计算线性时不变动态系统的离散相似法.其中,数值积分法主要有:欧拉(Euler)法,梯形法,龙格—库塔(Runge-Kutta)法和阿达姆斯(Adams)法;离散相似法主要有:置换法和相似变换法.6.为什么说模拟仿真较数字仿真精度低?其优点如何?.[答案]:由于受到电路元件精度的制约和容易受到外界的干扰,模拟仿真较数字仿真精度低,但模拟仿真具有如下优点:(1)描述连续的物理系统的动态过程比较自然和逼真;(2)仿真速度极快,失真小,结果可信度高;(3)能快速求解微分方程.模拟计算机运行时各运算器是并行工作的,模拟机的解题速度与原系统的复杂程度无关;(4)可以灵活设置仿真试验的时间标尺,既可以进行实时仿真,也可以进行非实时仿真;(5)易于和实物相连.7.采样控制系统数字仿真中连续部分离散化时的步长h如何选取?[答案]:(1)若仿真的任务仅要求计算系统输出y(t)而不要求计算系统内部状态变量,且连续部分的整体脉冲传递函数G(z)=Z[Gh(s)G0(s)]较易求出时,可选h=T(2)若连续部分整体脉冲传递函数G(z)=Z[Gh(s)G0(s)]不易求出;或仿真的任务要求计算系统输出y(t)和内部状态变量;或被控对象含有非线性环节时,可选h=T/N(N为正整数).8.采样控制系统数字仿真有哪几种方法?[答案]:采样控制系统仿真通常有差分方程递推求解法,双重循环方法,应用MATLAB控制工具箱时域响应分析函数法和Simulink仿真法.9.计算机仿真有哪些优点?[答案]:(1)对尚处于论证或设计阶段的系统进行研究,唯一的方法就是仿真.(2)经济,安全,效率高.(3)研究系统非常方便灵活.10.评价优化方法的优劣的应该考虑哪些因素?[答案]:三方面因素:(1)收敛性:收敛性的好坏表示某种优化方法适用范围的大小,具体表示算法对于相当一类目标函数均能找到最优点.(2)收敛速度:为了求出同样精度的最优点,不同的优化方法所需要的迭代次数不同,迭代次数少的优化方法收敛速度较快.(3)每步迭代所需的计算量:每步迭代所需的计算量也是决定寻优速度的另一重要因素.。
快速数字仿真算法

❖
从G(s)直接推导出G(z)的方法一般有两种:一种是替换法,即设法
找出s与z的一个对应公式,然后将G(s)中的s转换成z,由此得到G(z);
另一种方法是根匹配法,即设法找到一个G(z)使其与G(s)有相同的零极
点,我们将在下一节作介绍。
❖
替换法的基本思想就是设法找出一个由s平面到z平面的简单映射关
❖ 9.1.2替换法步骤 ❖ 1.设线性系统的传递函数为
❖
G(s)
U (s) E(s)
a0 s n b0 s n
a1sn1 b1sn1
... an1s an ... bn1s bn
(9-4)
❖ 要求出双线性变化下得到的z传递函数
❖
G(z)
U (z) E(z)
d0zn d1zn1 e0zn e1zn1
字仿真,由于参数限制,计算步长取得很小,这就加长了仿
真时间,如按小的时间常数来确定计算步长,将会引起计算
的不稳定,对于仿真都是不利于进行的。
❖
一般在实时仿真情况下,在解决计算精度与计算速度这
一对矛盾时,以计算速度为主要矛盾,在控制系统数字仿真
的过程中一般要求在满足计算稳定性及工程要求精度的条件
下,尽可能的提高仿真的计算速度。如采用高速计算机,采
用执行速度快的编程语言以及采用快速仿真算法等措施。
❖ 9.1 替 换 法
❖ 9.1.1 替换法原理
❖
替换法是建立在相匹配原理基础上的快速数字仿真算法。相匹配的
含义就是指仿真模型与原系统数学模型的动态和静态特性是一致的。即,
若G(s)是稳定的,那么与其相匹配的G(z)也应是稳定的,对于同一个输
入函数,由G(s)及G(z)所求出的输出函数应具有相同的特征,如终值等。
流体仿真知识点总结

流体仿真知识点总结流体仿真是指利用计算机模拟流体力学问题,通过数值方法研究流体的运动规律和流场性质。
它是一种重要的科学计算手段,广泛应用于航空航天、水利工程、环境工程、汽车工程、海洋工程等领域。
本文将对流体仿真的基本概念、数值方法、常见模型以及实际应用进行总结,以帮助读者全面了解流体仿真的知识体系。
一、基本概念1. 流体的基本性质流体是一种特殊的物质状态,具有不固定的形状和容易流动的特性。
其主要物理性质包括密度、压力、温度、速度、粘度等。
在流体力学中,通常将流体分为不可压缩流体和可压缩流体两种类型,分别对应于马赫数小于0.3和大于0.3的情况。
2. 流体力学基本方程流体力学基本方程包括连续方程、动量方程和能量方程。
其中连续方程描述了流体的质量守恒,动量方程描述了流体的动量守恒,能量方程描述了流体的能量守恒。
这些方程是描述流体运动规律的基础,也是流体仿真的数学模型基础。
3. 边界条件和初值条件流体力学问题的边界条件和初值条件对解的精度和稳定性有着重要影响。
边界条件指流场与固体边界的交界处的物理条件,通常包括速度、压力、温度等。
初值条件指初始时刻各物理量的数值分布。
确定合适的边界条件和初值条件是流体仿真的关键步骤之一。
二、数值方法1. 有限差分法有限差分法是一种基本的离散数值方法,它将求解区域分割成有限个离散点,通过差分逼近连续微分方程,将微分方程转化为代数方程组进而进行数值求解。
有限差分法在流体力学中得到了广泛应用,如Navier-Stokes方程、能量方程和扩散方程等都可以通过有限差分法进行离散求解。
2. 有限体积法有限体积法是将求解区域分割成有限个控制体,通过对控制体内部进行积分得到平均值,进而将微分方程转化为代数方程组。
有限体积法在流体力学中得到了广泛应用,特别适用于非结构网格和复杂流场的数值模拟。
3. 有限元法有限元法是一种通过拟合局部基函数的方法,将微分方程转化为代数方程组进而进行数值求解。
数值模拟
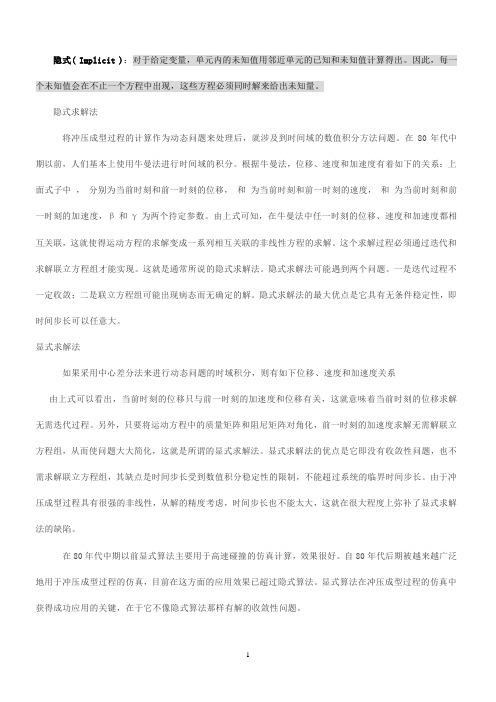
隐式( Implicit ):对于给定变量,单元内的未知值用邻近单元的已知和未知值计算得出。
因此,每一个未知值会在不止一个方程中出现,这些方程必须同时解来给出未知量。
隐式求解法将冲压成型过程的计算作为动态问题来处理后,就涉及到时间域的数值积分方法问题。
在80年代中期以前,人们基本上使用牛曼法进行时间域的积分。
根据牛曼法,位移、速度和加速度有着如下的关系:上面式子中,分别为当前时刻和前一时刻的位移,和为当前时刻和前一时刻的速度,和为当前时刻和前一时刻的加速度,β和γ为两个待定参数。
由上式可知,在牛曼法中任一时刻的位移、速度和加速度都相互关联,这就使得运动方程的求解变成一系列相互关联的非线性方程的求解。
这个求解过程必须通过迭代和求解联立方程组才能实现。
这就是通常所说的隐式求解法。
隐式求解法可能遇到两个问题。
一是迭代过程不一定收敛;二是联立方程组可能出现病态而无确定的解。
隐式求解法的最大优点是它具有无条件稳定性,即时间步长可以任意大。
显式求解法如果采用中心差分法来进行动态问题的时域积分,则有如下位移、速度和加速度关系由上式可以看出,当前时刻的位移只与前一时刻的加速度和位移有关,这就意味着当前时刻的位移求解无需迭代过程。
另外,只要将运动方程中的质量矩阵和阻尼矩阵对角化,前一时刻的加速度求解无需解联立方程组,从而使问题大大简化,这就是所谓的显式求解法。
显式求解法的优点是它即没有收敛性问题,也不需求解联立方程组,其缺点是时间步长受到数值积分稳定性的限制,不能超过系统的临界时间步长。
由于冲压成型过程具有很强的非线性,从解的精度考虑,时间步长也不能太大,这就在很大程度上弥补了显式求解法的缺陷。
在80年代中期以前显式算法主要用于高速碰撞的仿真计算,效果很好。
自80年代后期被越来越广泛地用于冲压成型过程的仿真,目前在这方面的应用效果已超过隐式算法。
显式算法在冲压成型过程的仿真中获得成功应用的关键,在于它不像隐式算法那样有解的收敛性问题。
系统时间响应仿真
梯形法校正
通过反复迭代,直到满足误差ε要求
梯形法实质上是采用了连续两点斜率平均值,以提高计算精度。
数值积分统一公式
这一思想被广泛应用于许多算法之中。实际应用时,可采用加权平均,即在每一步中取若干点,分别求出其斜率,然后加不同的权。
数值积分统一公式
f(t,y)——y(t)的导数
(见采样定理)或
ωc——系统开环频率特性的剪切频率(穿越频率); tr——系统在阶跃函数作用下的上升时间; ts——系统在阶跃函数作用下的调整时间。
步长选择原则⑵
应当指出 系统中最小时间常数的极点只影响瞬态过程起始段的形状,而瞬态过程则主要由那些靠近虚轴的主导极点所决定,由于固定步长是按起始段选取的,这就会造成后面阶段计算量的浪费,因而可采用变步长的方法。
欧拉法只是精确解的一次近似式,因此欧拉法的截断误差为 ,欧拉法为一阶精度。
若某种方法的局部截断误差为 ,则称它有r阶精度,即该方法是r阶的。r是衡量精度的重要标志。
⒊截断误差
几个概念⑵
采用数值方法解稳定的方程(稳定的系统)时,应保持系统稳定的特征,即要求用于计算的差分方程是稳定的。但是,由于计算机逐次计算时,初始数据的误差及计算过程的舍入误差对后面的计算结果将会产生影响(误差会传播)。所以带来计算数值是否稳定的问题。
也就是说,取不同点的斜率加权平均作为平均斜率,从而提高方法的阶数。
龙格—库塔法的一般形式
不论几阶龙格—库塔法,它们的计算公式总是由两部分组成:
上一步的计算结果 ym 及步长h乘以 tm~tm+1中各点导数的加权平均和。
从前面的分析可知,数值积分方法就是采用不同的差分方程来逼近原微分方程。
1
控制系统仿真实验报告
控制系统仿真实验报告班级:测控1402班姓名:王玮学号:072018年01月实验一经典的连续系统仿真建模方法一实验目的:1 了解和掌握利用仿真技术对控制系统进行分析的原理和步骤。
2 掌握机理分析建模方法。
3 深入理解阶常微分方程组数值积分解法的原理和程序结构,学习用Matlab编写数值积分法仿真程序。
4 掌握和理解四阶Runge-Kutta法,加深理解仿真步长与算法稳定性的关系。
二实验内容:1. 编写四阶 Runge_Kutta 公式的计算程序,对非线性模型(3)式进行仿真。
(1)将阀位u 增大10%和减小10%,观察响应曲线的形状;(2)研究仿真步长对稳定性的影响,仿真步长取多大时RK4 算法变得不稳定(3)利用 MATLAB 中的ode45()函数进行求解,比较与(1)中的仿真结果有何区别。
2. 编写四阶 Runge_Kutta 公式的计算程序,对线性状态方程(18)式进行仿真(1)将阀位增大10%和减小10%,观察响应曲线的形状;(2)研究仿真步长对稳定性的影响,仿真步长取多大时RK4 算法变得不稳定(4)阀位增大10%和减小10%,利用MATLAB 中的ode45()函数进行求解阶跃响应,比较与(1)中的仿真结果有何区别。
三程序代码:龙格库塔:%RK4文件clccloseH=[,]';u=; h=1;TT=[];XX=[];for i=1:h:200k1=f(H,u);k2=f(H+h*k1/2,u);k3=f(H+h*k2/2,u);k4=f(H+h*k3,u);H=H+h*(k1+2*k2+2*k3+k4)/6;TT=[TT i];XX=[XX H];end;hold onplot(TT,XX(1,:),'--',TT,XX(2,:)); xlabel('time')ylabel('H')gtext('H1')gtext('H2')hold on水箱模型:function dH=f(H,u)k=;u=;Qd=;A=2;a1=;a2=;dH=zeros(2,1);dH(1)=1/A*(k*u+Qd-a1*sqrt(H(1)));dH(2)=1/A*(a1*sqrt(H(1))-a2*sqrt(H(2)));2编写四阶 Runge_Kutta 公式的计算程序,对线性状态方程(18)式进行仿真:1 阀值u对仿真结果的影响U=;h=1; U=;h=1;U=;h=1;2 步长h对仿真结果的影响:U=;h=5; U=;h=20;U=;h=39 U=;h=50由以上结果知,仿真步长越大,仿真结果越不稳定。
面向工程应用的数值积分法仿真实验

LI J i e
( D e p a r t m e n t o f T h e r ma l E n g i n e e r i n g , C h e n g d e P e t r o l e u m C o l l e g e , C h e n g d e 0 6 7 0 0 0 , H e b e i ,C h i n a )
关键词 : Ma t l a b ; 龙 格 一库 塔 法 ; 仿真 ; 状 态空间
中图分类号 : T P 3 9 1 . 9
文献标识码 : B
文章 编 号 : 1 0 0 8 — 9 4 4 6 ( 2 0 1 3 ) 0 2 - 0 0 3 9 - 0 5
Nu me r i c I n t e g r a t i o n Al g o r i t hm Em ul a t i o n Ex pe r i me n t
r u n g e — k u t t a me t h o d s i mu l a t i o n p r o g r a m ,g i v e s s t a t e s pa c e s y s t e m mo d e l s i mul a t i o n,a n d f u r t h e r i m— p r o v e s t he s i mu l a t i o n s p e e d a n d a c c u r a c y,a nd in f d s o u t t h e b e s t s i mu l a t i o n s t e p,i n o r d e r n o t t o i n - f i ni t e l y r e d u c e s t e p c o n d i t i o n s t o a c h i e v e h i g h e r p r e c i s i o n,a n d o b t a i n a mo r e r e l i a b l e s i mu l a t i o n t i me
控制系统数字仿真与CAD_课后习题答案
第一章习题1-1什么是仿真?它所遵循的基本原则是什么?答:仿真是建立在控制理论,相似理论,信息处理技术和计算技术等理论基础之上的,以计算机和其他专用物理效应设备为工具,利用系统模型对真实或假想的系统进行试验,并借助专家经验知识,统计数据和信息资料对试验结果进行分析和研究,进而做出决策的一门综合性的试验性科学。
它所遵循的基本原则是相似原理。
1-2在系统分析与设计中仿真法与解析法有何区别?各有什么特点?答:解析法就是运用已掌握的理论知识对控制系统进行理论上的分析,计算。
它是一种纯物理意义上的实验分析方法,在对系统的认识过程中具有普遍意义。
由于受到理论的不完善性以及对事物认识的不全面性等因素的影响,其应用往往有很大局限性。
仿真法基于相似原理,是在模型上所进行的系统性能分析与研究的实验方法。
1-3数字仿真包括那几个要素?其关系如何?答: 通常情况下,数字仿真实验包括三个基本要素,即实际系统,数学模型与计算机。
由图可见,将实际系统抽象为数学模型,称之为一次模型化,它还涉及到系统辨识技术问题,统称为建模问题;将数学模型转化为可在计算机上运行的仿真模型,称之为二次模型化,这涉及到仿真技术问题,统称为仿真实验。
1-4为什么说模拟仿真较数字仿真精度低?其优点如何?。
答:由于受到电路元件精度的制约和容易受到外界的干扰,模拟仿真较数字仿真精度低但模拟仿真具有如下优点:(1)描述连续的物理系统的动态过程比较自然和逼真。
(2)仿真速度极快,失真小,结果可信度高。
(3)能快速求解微分方程。
模拟计算机运行时各运算器是并行工作的,模拟机的解题速度与原系统的复杂程度无关。
(4)可以灵活设置仿真试验的时间标尺,既可以进行实时仿真,也可以进行非实时仿真。
(5)易于和实物相连。
1-5什么是CAD技术?控制系统CAD可解决那些问题?答:CAD技术,即计算机辅助设计(Computer Aided Design),是将计算机高速而精确的计算能力,大容量存储和数据的能力与设计者的综合分析,逻辑判断以及创造性思维结合起来,用以快速设计进程,缩短设计周期,提高设计质量的技术。
实验:控制系统数字仿真之数值积分法

1
1
0.8
0.8
0.6
0.6
0.4
0.4
0.2
0.2
0
0
0 50 100 150 200 250 300 350 400 450 500
0
50
100
150
200
250
300
350
400
450
500
1.4
1.2
ts=199, Mp=18.2175, FAI=0.93537, tr=73, tp=106, ys=1.0003 ts=147, Mp=16.7351, FAI=0.94362, tr=74, tp=107, ys=1.0003 ts=147, Mp=16.7505, FAI=0.94355, tr=74, tp=107, ys=1.0003
ts=147.2, Mp=16.8911, FAI=0.94279, tr=73.9, tp=107, ys=1.0003
1
0.8
0.6
0.4
0.2
0
0
50
100
150
200
250
300
350
400
450
500
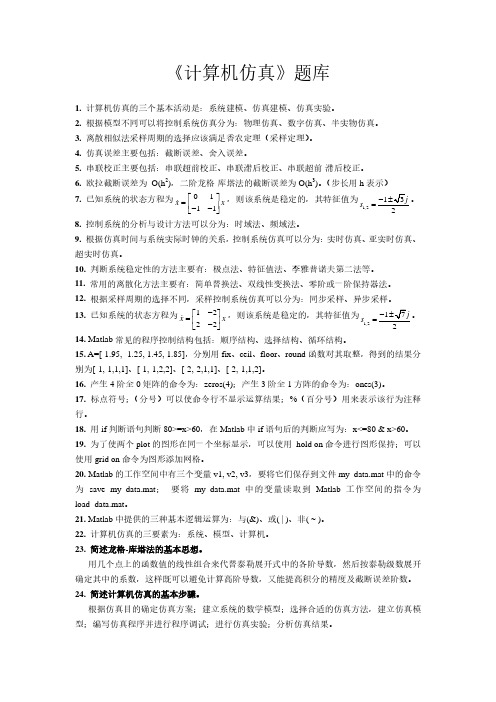
用梯形法得出系统响应曲线:
若采用欧拉法,误差为红色曲线围成的面积,而如果用梯形法,误差减少为 蓝色曲线围成的面积。同时,要求出蓝色曲线围成的面积,就要先出下一个点的 值。因此增加了计算量。 算法: 先用欧拉法求出下一个点的值, 用下一个点的值求这个点的斜率, 接着就能 求出梯形的面积。用新的面积(代表斜率)求出下一个点的值。 实验程序代码(与之前相同的部分没有复制):
实验:控制系统数字 仿真之数值积分法
实验目的:
仿真技术实验程序及思考题解答(仅供参考)
实验一 连续系统的数字仿真一、实验目的1. 熟悉Matlab 中m 文件的编写;2. 掌握龙格-库塔法的基本原理。
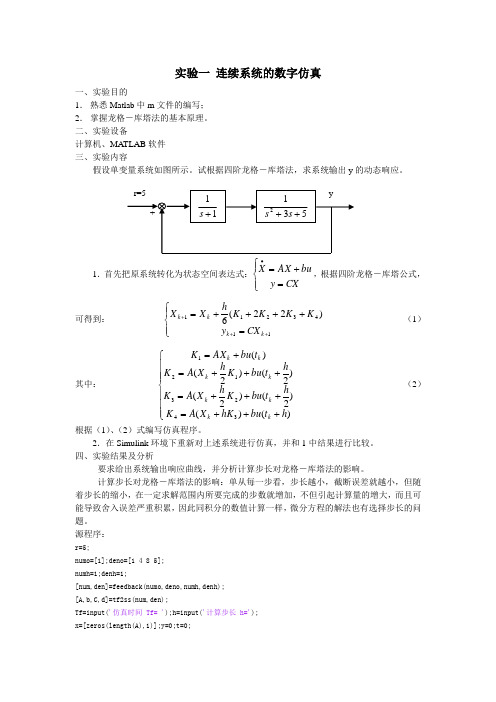
二、实验设备计算机、MATLAB 软件三、实验内容假设单变量系统如图所示。
试根据四阶龙格-库塔法,求系统输出y 的动态响应。
1.首先把原系统转化为状态空间表达式:⎪⎩⎪⎨⎧=+=•CXy bu AX X ,根据四阶龙格-库塔公式,可得到: ⎪⎩⎪⎨⎧=++++=+++1143211)22(6k k k k CX y K K K K h X X (1) 其中: ⎪⎪⎪⎩⎪⎪⎪⎨⎧+++=+++=+++=+=)()()2()2()2()2()(3423121h t bu hK X A K h t bu K h X A K h t bu K h X A K t bu AX K k k k k k k k k (2) 根据(1)、(2)式编写仿真程序。
2.在Simulink 环境下重新对上述系统进行仿真,并和1中结果进行比较。
四、实验结果及分析要求给出系统输出响应曲线,并分析计算步长对龙格-库塔法的影响。
计算步长对龙格-库塔法的影响:单从每一步看,步长越小,截断误差就越小,但随着步长的缩小,在一定求解范围内所要完成的步数就增加,不但引起计算量的增大,而且可能导致舍入误差严重积累,因此同积分的数值计算一样,微分方程的解法也有选择步长的问题。
源程序:r=5;numo=[1];deno=[1 4 8 5];numh=1;denh=1;[num,den]=feedback(numo,deno,numh,denh);[A,b,C,d]=tf2ss(num,den);Tf=input('仿真时间 Tf= ');h=input('计算步长 h=');x=[zeros(length(A),1)];y=0;t=0;for i=1:Tf/h;K2=A*(x+h*K1/2)+b*r;K3=A*(x+h*K2/2)+b*r;K4=A*(x+h*K3)+b*r;x=x+h*(K1+2*K2+2*K3+K4)/6;y=[y;C*x];t=[t;t(i)+h];endplot(t,y)Tf=5 h=0.02五、思考题1.试说明四阶龙格-库塔法与计算步长关系,它与欧拉法有何区别。
计算机仿真题库
仿真是指用模型(物理模型或数学模型)代替实际的系统进行实验和研究,其遵循原理 抽象、相似性原理的原则,相似性原理包括几何相似、性能相似、环境相似等。 40. 数据插值和曲线拟合的区别?
数据插值是研究如何平滑的估算出基准数据之间的其他点的函数值,所以插值所得曲线 必定穿过基准数据;而曲线拟合研究的是如何寻找平滑曲线以最好的表现带噪声的测量数据, 但不要求你和曲线穿过这些测量数据点。 41. 数值运算与符号运算的区别?
21. Matlab 中提供的三种基本逻辑运算为:与(&)、或( | )、非( ~ )。
22. 计算机仿真的三要素为:系统、模型、计算机。
23. 简述龙格-库塔法的基本思想。
用几个点上的函数值的线性组合来代替泰勒展开式中的各阶导数,然后按泰勒级数展开
确定其中的系数,这样既可以避免计算高阶导数,又能提高积分的精度及截断误差阶数。
t=(0:20)/20; r=sin(2*pi*t)+2; [x,y,z]=cylinder(r,40); cx=imread('flowers.tif');
进行数组运算的两个数组必须有相同的尺寸。进行矩阵运算的两个矩阵必须满足矩阵运 算规则,如矩阵 a 与 b 相乘(a*b)时必须满足 a 的列数等于 b 的行数。在加、减运算时数 组运算与矩阵运算的运算符相同,乘、除和乘方运算时,在矩阵运算的运算符前加一个点即 为数组运算,如 a*b 为矩阵乘,a.*b 为数组乘。 36. 在 Matlab 中什么是图形句柄?图形句柄有什么用途?
在连续系统的数字仿真中,选择仿真算法一般会考虑求解精度、速度、数值稳定性、自 启动能力、步长等。常用的仿真方法有:欧拉法、四阶龙格-库塔法、离散相似法等。欧拉 法属于自启动算法,适用于线性系统和非线性系统,方法简单,但误差的积累导致求解精度 降低。四阶龙格库塔法也属于自启动算法,适用于线性和非线性系统,支持单步长和可变步 长,求解速度和精度较高,但仿真时间较长。离散相似法一般用于状态方程,按环节离散相 似法可用于非线性系统,按系统离散相似法仅限于线性系统。 31. 什么是实时仿真?什么情况下需要进行实时仿真?它在算法上有什么要求?
吉大15春学期《控制系统数字仿真》在线作业二
吉大15春学期《控制系统数字仿真》在线作业二一、单选题(共 15 道试题,共 30 分。
)V1. 下列哪条指令是求矩阵的行列式的值(C)。
A. invB. diagC. detD. eig满分:2 分2. hold命令的作用是(B)。
A. 给图形添加栅格B. 图形窗口保持C. 关闭图形D. 去除图形栅格满分:2 分3. 绘制系统奈氏曲线的命令是(C)。
A. stepB. pzmapC. nyquistD. sgrid满分:2 分4. 给图形添加栅格的命令是(D)。
A. figureB. hold offC. hold onD. grid满分:2 分5. 清空Matlab工作空间内所有变量的指令是(C)。
A. clcB. clsC. clearD. clf满分:2 分6. 绘制系统零极点图的命令是(B)。
A. stepB. pzmapC. rlocusD. sgrid满分:2 分7. 将系统传递函数形式变换为零极点形式的命令是(C)。
A. tf2zpB. ss2tfC. ss2zpD. zp2tf满分:2 分8. i=2; a=2i;b=2*i;c=2*sqrt(-1);程序执行后;a, b, c的值分别是(C)。
A. a=4,b=4,c=2.0000iB. a=4,b=2.0000i, c=2.0000iC. a=2.0000i, b=4,c=2.0000iD. a=2.0000i,b=2.0000i,c=2.0000i满分:2 分9. AutoCAD中的图层数最多可设置为(B)。
A. 10层B. 没有限制C. 5层D. 256层满分:2 分10. 在MATLAB工作空间中,表示圆周率的特殊变量是(A)。
A. piB. ansC. iD. eps满分:2 分11. 某系统传递函数为G,语句pzmap(G)的执行结果为(B)。
A. 绘制系统的根轨迹图B. 绘制系统的零极点图C. 绘制系统的奈氏曲线D. 绘制系统的单位阶跃响应曲线满分:2 分12. 在线形图型格式的设置中,字符b表示什么颜色(A)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
! ( t ) = − y ( t ), 即f ( t , y ) = − y ( t ) 解: y
梯形法递推式: h y n = y n −1 + [f (t n −1, y n −1) + f (t n , y n )] 2 2 2 = y n −1 − 0.05( y n −1 + y n ) 隐式算法,需先解此非线性方程:
r
kw = ω1k1 + ω2k 2 + ! + ω r k r =
∑
i =1
ωi ki
后面Runge—Kutta法就是采用这样的思想来 进行计算的。
26
梯形法大大提高了精度,但为隐式算法,每次 递推计算时需解一次非线性方程,计算量较大 由此考虑进行改进,先用Euler法计算出: x (t n +1) 的近似值 x pn +1 代入导函数 fn +1 求出近似值 f
第6 章
数值积分法仿真
1
第6 章
数值积分法仿真
本章主要教学内容
本章主要介绍控制系统数学模型的相关知识, 通过本章的学习,应掌握以下内容:
Ø 求解常微分方方程数值解的一一般方方法 Ø 数值积分法的基本概念及其常用用方方法 Ø 以系统微分方方程或传递函数作为数学模型的仿真过程
及程序设计方方法 Ø 以系统动态结构图作为数学模型的仿真过程及程序设计方方法 Ø 仿真步⻓长的选择与系统仿真精度和稳定性的对应关系 Ø 快速仿真算法的概念、特点及其应用用
tn+1
11
t
3、切线近似(1)
t n 的一个小邻域内 [t n , t n +1] ,曲线x(t)可用 在 t n 处的切线来表示, x(t) 在 t n 处的斜率为:
dx = f (t n , x n ,un (t )) dt t = t n
x = x n + f (t n , x n ,un )(t − t n ) x (t n +1) t n +1 取切线上 处的值来近似 x (t n +1) ≈ x (t n ) + hf (t n , x n ,un )
前向Euler法递推式: y n = y n −1 + hf (t n −1, y n −1) 2 = y n −1 + 0.1× ( − y n −1)
= y n −1(1 − 0.1y n −1) 有初始条件: t 0 = 0, y 0 = 1
可进行递推:
t1 = 0.1, y1 = y 0 (1 − 0.1y 0 ) = 1 − 0.1 = 0.9
p n +1
再代入梯形公式求解。
= xn + hf (t n , xn ) 预估公式(Euler法) h c p x n+1 = xn + f (t n , xn ) + f (t n+1 , x n+1 ) 2
n +1
x
p
(
)
校正公式(梯形法)
27
为预估—校正法,也称为改进的Euler法。
! (t ) + y 2 (t ) = 0, y (0) = 1 例:设系统方方程 y
23
f(t) 误差 fn
fn+1
f(t) fn
误差
fn+1
左矩形近似
右矩形近似
tn
tn+1
t
tn
tn+1
t
f(t) 误差 fn
fn+1
梯形近似
24
tn
tn+1
t
梯形法实质是采用了 (t n , x (t n )) 和 (t n +1, x (t n +1)) 两点斜率平均值的结果,由于利用了两点的信息, 1 ⎧ 从而提高了计算精度。 x = x + h(k + k )
20
f(t) 误差 fn
fn+1
f(t)
左矩形近似
tn
tn+1
t
t
f(t)
f(t)
t
21
t
Ø 梯形法
Euler法的计算精度较差,如果改用梯形面积 代替每个步距的曲线面积,就可提高精度。 精确积分应为曲边梯形的面积: 现用直边梯形的面积来近似:
t n +1
t n +1
tn
∫
f (t , x ,u (t ))dt
3
6.1.2 离散化原理
• 在数字计算机上对连续系统进行仿真时,首先遇到的问题是,数字 计算机的数值及时间都是离散的(计算精度,指令执行时间),而 被仿真系统的数值和时间是连续的,后者如何用前者来实现? ! = f ( y, u, t ) ,其中u(t)为输入变量,y(t)为系统状态变 y • 设系统模型为: 量。令仿真时间间隔为h,离散化后的输入变量为u’(tk), 其中tk表示 t=kh。如果 u’(tk) ≈ u(tk), y’(tk) ≈ y(tk),则认为两模型等价,称为 相似原理。
2
6.1
6.1.1 概述
数值积分法
数字仿真模型、算法及仿真工工具
控制系统的数字仿真是利用数字计算机作为仿真工具,采用数学上的各 种数值算法求解控制系统运动的微分方程,得到被控物理量的运动规律。 通常,计算机模拟被控对象是用一定的仿真算法来实现被控对象的运动规 律,这是基于被控对象的数学模型来完成的。 控制系统的数学模型经过合理的近似及简化,大多数建立为常微分方程 的表达形式。由于数学计算的难度和实际系统的复杂程度,在实际中遇到 的大部分微分方程难以得到其解析解,通常都是通过数字计算机采用数值 计算的方法来求取其数值解。在高级仿真软件(例如 MATLAB )环境下, 已提供了功能十分强大、且能保证相应精度的数值求解的功能函数或程序 段,使用者仅需要按规定的语言规格调用即可,而无需从数值算法的底层 考虑其编程实现过程。
用右矩形面积近似该区间的曲线面积
x (t n +1) ≈ x (t n ) + f (t n +1, x n +1,un +1)h
得到:
x n +1 = x n + hfn +1
这是右矩形欧拉公式,是一个隐式算法.
10
右矩形(也称为后向欧拉法)近似及误差
f(t) fn
误差
fn+1
右矩形近似
tn
""(t n ) 2 x " (t n )h + x (t n +1) = x (t n + h) = x (t n ) + x h +! 2!
= x (t n ) + f (t n , x n ,un )h
写成差分方程为 x n +1 = x n + hf (t n , x n ,un ) 这就是解微分方程初值问题的欧拉算法。
18
前向欧拉yn = yn−1 + hf (tn−1 , yn−1 )
后向欧拉yn = yn−1 + hf (tn , yn )
f(t) 误差 fn fn+1
f(t) fn
误差
fn+1
左矩形近似
右矩形近似
tn
tn+1
t
tn
tn+1
t
19
前向Euler法在不同步长的结果比较
y n = y n −1 + hf (t n −1, y n −1)
y(t ) =
y + ∫t
0
t
0
f (t , y)dt
右图所示曲线下的面积就 是y(t),由于难以得到积分 的数值表达式,所以采用 近似的方法,常用有三种形式: Ø 欧拉法 Ø 梯形法 Ø 龙格一库塔法
5
Ø 欧拉法(Euler Method)
Euler法是最简单的一种数值积分法的单步 运算,虽然计算精度较差,但几何意义明显, 便于理解,能说明构造数值积分算法的基本思 想。 下面采用三种方法推导出Euler法的数值近 似公式,以便对数值积分器的基本思想能透彻 了解。
6
1、Taylor级数展开
! (t ) = f (t , x ,u(t )) 以一阶连续系统为例, ⎧ x ⎨ x (t ) = x 微分方程及初值如右: 0 ⎩ 0 x(t)为解析解,将x(t)展开成Taylor级数
只取一次项,其余忽略 x (t ! ) ≈ x ( t ) + x (t n )h n +1 n
(t n , x n ) 以 fn 为斜率的切线方程为: 过点
也能得到: x n +1 = x n + hfn
前向欧拉法
12
3、切线近似(2)
[t n , 曲线 t n +1] t n +1 处的切线来表示, 在 x(t) 可用 x(t) 在 t n +1 处的斜率为:
dx = f (t n +1, x n +1,un +1(t )) dt t = t n +1
15
t 2 = 0.2, y 2 = y1(1 − 0.1y1) = 0.9 × 0.91 = 0.819 ! t10 = 1, y10 = y 9 (1 − 0.1y 9 ) = 0.4682 !
后向Euler法递推式:
y n = y n −1 + hf (t n , y n )
= y n −1 − 0.1y n 2
过点 (t n , x n )
以 fn+1 为斜率的切线方程为:
x = x n + f (t n +1, x n +1,un +1)(t − t n ) x (t n +1) t n +1 取切线上 处的值来近似 x (t n +1) ≈ x (t n ) + hf (t n +1, x n +1,un +1)