2BQX-6型玉米免耕精密播种机研制
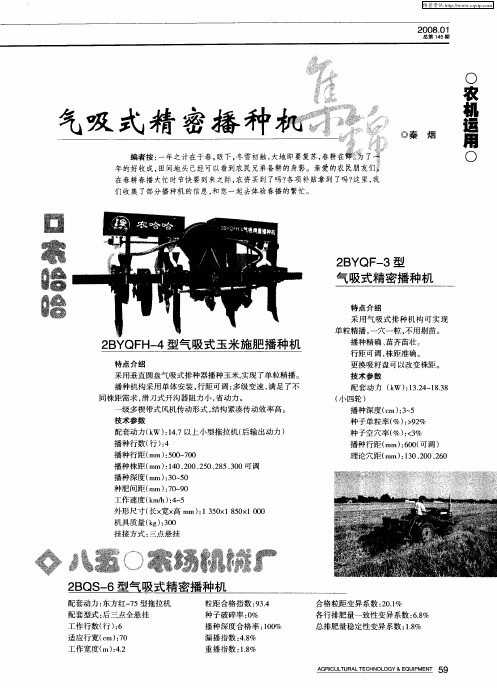
气吸式精密播种机
,
;
,
,
采 光 面 宽度合格 率 : ≥ 7 0 % 穴粒 数合 格 率
:≥
口
同方 向
,
巧 妙 地 解 决 了 6 6 + 10
。
c m
85%。
的行 距 调 整 问题
2 B ห้องสมุดไป่ตู้M
一
1 6 17 18 19 / 1 型
与小 四 轮 拖 拉 机 配 套 可
,
气 吸 式 免耕精 量 播种机
四轮
h 作 业 速 度 ( k m / ) :6
-
10
生 产率 ( h m
2
/ h
) :2 3 7
—
.
配 套 动 力 ( k W ) :1 1 0 3
.
~
29 4 1
.
作 业 行 数 ( 行 ) :2
、
、
行距 ( c m ) : 6 0
4
~
~
70
可调
侧 施 肥 深 度 ( c m ) :苗 侧
5
,
深
8
。
10
~
~
h 施 肥 量 ( k g / m ) :1 5 0
750
播种深度 (c m ) :
调
3 7
~
可
粒 距 合格 率 : ≥ 8 0 %
漏播率
豆
≤ 8%
:
玉 米
≤ 5%
大
2 BOM
型气 吸式播种机
上 将 气 吸 式 精 密 排 种 与铺 膜 作 为
,
一
行距 (c
): 6 6 ( 可 调 )
行 数 ( 行 ) :1 2 地 膜 宽度 ( m
玉米免耕播种机的结构原理与技术优化方向
玉米免耕播种机的结构原理与技术优化方向玉米免耕播种机是一种种植玉米的农业机械设备,它通过先进的技术手段,实现了在不进行耕地作业的情况下,直接将玉米种子播种在土壤中。
它的结构原理和技术优化方向主要包括以下几个方面:1. 结构原理:玉米免耕播种机由主要由播种部分、排种部分、营养土喂养部分、控制系统四个部分组成。
播种部分主要由种子储存器、种子排挡、种子输送器和种子排种器等组成,可以自动将种子按照一定的规格排种;排种部分是将排种器排出的种子均匀地撒播在土壤上,保证播种均匀;营养土喂养部分通过施肥装置给作物施肥;控制系统则是整个机械设备的核心,通过各种传感器和控制器,实现对播种机的自动控制。
2. 技术优化方向:为了提高玉米免耕播种机的种植效果和工作效率,可以从以下几个方面进行技术优化:- 种子排种器的优化:要保证种子的排种均匀,并且可以根据不同的土壤状况进行调节。
可以通过改变种子排种器结构设计,优化排种机构件的形状和摆放位置等方法来达到目的。
- 控制系统的优化:通过改进控制系统的算法和控制器性能,提高机器对土壤状况的感知和自适应能力,实现更加精确的播种控制。
可以利用现代传感技术、无线通信技术和云计算等手段,实时监测和分析土壤信息,从而实现对播种机的精准控制。
- 施肥装置的优化:为了提高作物的生长质量和产量,可以改进营养土喂养部分的设计,实现对营养土的量和种类的准确控制。
可以采用智能肥料喂养系统,通过调节施肥装置的供肥参数,实现对营养土的精确喂养。
- 能量利用的优化:为了节约能源和减少对环境的污染,可以改进机器的动力系统,提高燃油利用率。
可以采用混合动力技术、电动驱动技术等,提高机器的能量转换效率和动力性能。
玉米免耕播种机的结构原理和技术优化方向对于提高农业种植效率和减少土壤破坏具有重要意义。
通过不断的研发和优化,可以使得玉米免耕播种机在实际生产中发挥更好的作用。
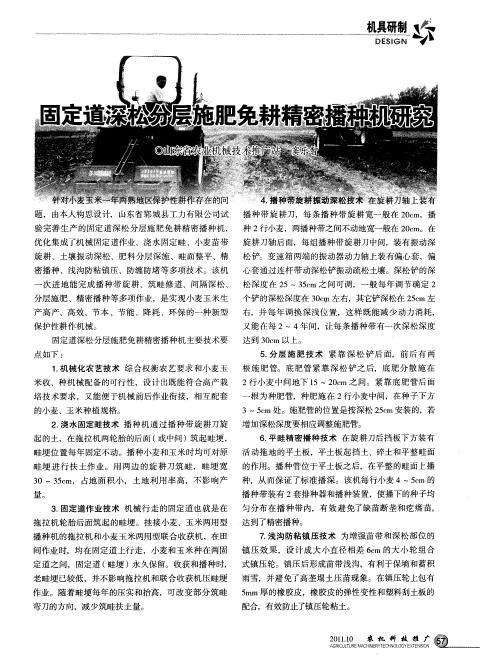
同定道深松分层施肥免耕精密播种机研究
烧种 烧苗,显著 提高肥 料利用率 ,减少作业环 节 ; 七
固定道 深松 分 层施 肥免 耕精密 播种 保 护性 耕作 是 采用防缠防堵措施 ,能保证 播种质量 ,提 高作业 效
技 术 的主要 优点 : 一是秸秆 还 田覆盖 地表 , 能蓄水保 率 ; 八是能减少机械配 置和机械进地 次数,降低作业 墒,改善 土壤 结构 ,培肥 地力,减 少水蚀 、风蚀 ; 二 成本 。能减 少水、化 肥 、钢材、能源等 资源 消耗 ,保
7浅 沟防粘镇 压技 术 为增强苗 带和 深松部 位 的 .
e a 间作业 时,均 在 固定 道上行走 ,小麦 和玉米 种在两 固 镇 压 效 果 ,设 计成 大 小直径 相差 6r的大小 轮 组合
定 道之 间 ,固定 道 ( 畦埂 ) 久保留。收获 和播种 时, 式镇压 轮。镇 压后形成苗 带浅沟,有利 于保墒 和蓄积 永 老畦埂 已较低 ,并不影响拖拉 机和联 合收获机压 畦埂 雨雪 ,并 避免了高垄塌土 压苗现象 。在 镇压轮上包有 a r 作业 。随着畦埂 每年 的压实和抬高 ,可改变 部分筑 畦 5 m厚 的橡胶 皮,橡胶皮 的弹性变性 和塑料刮土板的 弯刀的方 向,减少筑 畦扶 土量。
果穗。排 除办法 : 调整 皮带 ; 除卡穗。 排 6 第二升运器不转 果穗掉人弧形板中 ; 穗带入 . 果
1 摘辊堵塞 故障原 因 : . 田间杂草太 多 ; 切草刀闸
传动皮带过松。排 除办法 : 开弧形板 盖, 掀 间隙大 ; 摘辊 间隙太小 ; 前进 速度不恰 当,拨 禾链不 隔板下面 ; 转 ; 穗齿轮箱 安全弹簧 弹力不够。排 除方法 : 摘 降低 掏出卡穗 ; 倒转清除 ; 调紧皮带。 行驶 速度 ; 调整切刀间隙 ; 整穗 辊 问隙 ; 调 改变 工作 挡 位 ; 除拨 禾轮不转故障 ; 排 调整 弹簧。 7 剥皮机 堵塞 故 障 原 因 : . 成对 剥 皮机 未 靠 紧 ; 传动皮带松 ; 压送器高低位 置不 当 ; 压送器胶皮老化、
玉米免耕保护性播种机械选型与推广研究
维普资讯
2 0 第 3期 06年
形式
农 业 机 械 化 与 电气 化
一3 3一
采 用 单 体 组 合 形 式 ,这 样 既 可 单 独 形 成 弦 立 主 体 ,也 可 随 主 机 动
力的大小相对配 挂若干个 单体 。这 样 就可 配置 出两 行 、 行 、 行 、 三 四 五 行 、 行 等 不 同 行 数 的播 种 机 , 不 六 使 同功率的拖拉机 都能进行 这种形式
维普资讯
一
3 一 2
农 生 机 械 化 与 电 气 化
20 0 6年第 3 期
 ̄ nqltuu P|
马 风 君 ( 辽宁省农业机械化服务 中心, 辽宁 沈 阳 104 ) 101
1 玉米 免耕 ( 保护 性 ) 种机现 状 分 析 播 2 M一 B 5型机适应 多种免耕作业 1 国内现育机具的基本情况介绍 方 式 ( 1 相对 其它机 型而言 ) 精 量播 , 而且整机较 重 这 目前 国内 播 种杌 型 号 育很 多 种 方面还有 欠缺 , 种 ,我 们 只 选 其 中 更 具 代 表 性 的 几 种 机 型 可 实 现 多 种 情 况 下 的 免 耕 作 款机具进行分析和研究 。 业 .蒲足一定条 件也可进 行精量播 ( )B 12 QM一 A 型 原 茬 免 耕 播 种 种. 6 是目前比较好 的机 型。 施肥机 2 QM一 A型机适 应 多种 免耕 B 6 但 谚机 与太 中型拖拉 机 配套 , 主 作业方式 , 免耕 作业 效果稍 差。由 要用于 原茬地直 接进行玉米 等作物 于 采用气吸排种 结构 .精 量播 种效 免 耕 播 种 。 妥 用 了 单 体 仿 形 和 气 吸 果 较好 . 但也有整机 质量重的 问题 . 排 种 结 构 .: 次 完 成 四土 、 ' 、 是目前一款 比较好的机型 。 i一 开 匈 播种、 覆土 、 压和 侧施 肥作业 , 镇 适 2 QM一 型机不能适 应多种免 B 2 甩于 双季抢 件及秸 秆还 田的 播种施 耕 作业方式 ,免耕效果也 不如上述 肥作业 。 机 型 . 精 量 播 种效 果 较 好 . 未 来 但 为 ( )B 2 2 QM- 2型免耕气 吸施肥 在 小型拖拉机 上配置两行 免耕作业 播种机 精 量 播 种 机 提 供 了 很 多借 鉴 , 是 一 该机 与小 四轮拖拉 机 配套 , 种 过菠 型的机具 嗣 于 原 茬 地 直 接 进 行 玉 米 免 耕 小 型 播 2 Y一 F型 机 只 适 用 于 麦 茬 地 B 3 种施 肥机具 , 一次 作业可完成去 茬 、 免耕播种玉米 ,也达不到 精量播种 开 淘、 施肥 、 种、 播 覆土 、 镇压 等作业 要求 , 但整 机 质量鞍 轻 , 结构 简捷 坏 节,是一种 全悬 挂式 小型精密播 且 能配 t 2马 力拖拉 机进 行三行 麦 种帆 。 茬免耕播种施肥 作业 ,无 疑会给我 ( )B - F型玉米施肥播种机 们 的研究工作带 来很 多的皓鉴与启 32 Y 3 特 别适合 小麦 收获 后在 麦茬上 不 。 免耕播种 玉米 该机结梅简单 , 重量 2 玉 米 免 耕 精 量 播 种 机 嚣 体 结 构 轻 , 次作业可 完成开 沟 、 一 施肥 、 播 方 案 的 分 析 论证 种、 覆土、 镇压等 多项作业 2】 玉米免耕精撵机 总体 结构组合 . ( )B 4 2 M- 型玉米免耕施肥播 5 种机 该机是一 种新型播 种机 ,能在 原茬地上 免耕播 种作业 ,也可在地 表有 大量玉米或 小麦秸秆 覆盖未经 整地 的地上直 接播种 。诙机 能一次 完成 开掏 、播 种 ( 精播或宰 精量潘 种)施肥 ( 、 垂直深施 ) 镇压等作业。 、 1 各种杭具 对免耕作业适应性 的 . 2
玉米免耕精密播种机漏播补偿系统的研究

玉米免耕精密播种机漏播补偿系统的研究陈㊀刚ꎬ孙宜田ꎬ孙永佳ꎬ沈景新ꎬ何青海ꎬ李青龙(山东省农业机械科学研究院ꎬ济南㊀250100)摘㊀要:研制的漏播补偿系统ꎬ采用等待补种㊁实时充种的方式ꎬ根据补种过程各动作时间关系ꎬ控制电磁阀和补种系统排种器动作时间ꎬ实现适时补种ꎮ该系统以2BYFZ-4型玉米免耕精密播种施肥机为载体进行田间试验ꎬ结果表明:安装漏播补偿系统后ꎬ机具在5~7km/h速度下播种合格率提升至99.47%㊁99.35%㊁98.75%ꎬ漏播补偿系统补种性能良好ꎮ关键词:免耕精密播种机ꎻ漏播补偿系统ꎻ补种动作时间ꎻ玉米中图分类号:S223.2+5㊀㊀㊀㊀㊀㊀㊀文献标识码:A文章编号:1003-188X(2019)07-0095-050㊀引言黄淮海地区在有秸秆覆盖㊁根茬残留的地面进行玉米免耕播种作业时ꎬ容易发生漏播ꎮ发生漏播需要后期进行人工补苗ꎬ既浪费人力ꎬ又因错过最佳播种时间而影响作物生长ꎮ目前ꎬ国内外已有对漏播补偿的相关研究:张平华[1]基于虚拟仪器进行了漏播检测及补偿技术的研究ꎻ朱瑞祥等[2]研制了一种利用超越离合器单向锁合原理的漏播补种系统ꎮ本文研究的漏播补偿系统在主排种装置外增加一套独立的补种装置ꎬ漏播发生时ꎬ控制器根据补种过程各动作时间关系ꎬ适时驱动补种机构将待补的种子排出ꎬ实现漏播的适时自动补种ꎬ同时控制补种系统的排种装置完成补种区自动充种ꎮ1㊀系统结构与工作原理1.1㊀设计原理漏播补偿系统由补种箱㊁补种器㊁补种电机㊁补种管㊁电磁阀㊁控制器㊁种子检测传感器和落种检测传感器等组成ꎬ如图1所示ꎮ漏播补偿系统的补种箱㊁补种管和电磁阀安装在主排种装置的后面ꎬ补种管与排种管管口之间的距离可调节ꎬ设定距离为ΔL[3ꎬ5]ꎮ主排种装置由电动机驱动ꎬ通过控制电机转速的快慢调收稿日期:2018-01-15基金项目:山东省农机装备研发创新计划项目(2017YF014)ꎻ山东省重点研发计划项目(2016CYJS03A01)作者简介:陈㊀刚(1983-)ꎬ男ꎬ山东淄博人ꎬ工程师ꎬ工学硕士ꎬ(E-mail)cngn2007gx@126.comꎮ通讯作者:孙宜田(1980-)ꎬ男ꎬ山东滕州人ꎬ高级工程师ꎬ工学硕士ꎬ-节播种粒距ꎮ1.主排种装置㊀2.排种电机㊀3.种子检测传感器㊀4.排种管5.电磁阀㊀6.补种管㊀7.落种检测传感器㊀8.补种系统排种装置9.补种电机㊀10.补种箱图1㊀漏播补偿系统结构示意图Fig.1㊀SchematicdiagramofThemissseedingcompensationsystem漏播补偿系统包括状态检测装置和控制机构两部分ꎮ检测装置包括种子检测传感器和落种检测传感器ꎬ分别检测播种和补种状态信息ꎮ控制机构包括控制器㊁触摸屏㊁补种系统排种装置㊁补种电机及电磁阀等部件ꎮ补种电机采用步进电机ꎬ可以精确控制补种系统排种装置的转速和转角ꎮ补种系统排种装置采用自主设计改进的窝眼轮式排种器ꎬ该排种器只有1个窝眼ꎬ可保证排种器旋转1周有1粒种子排出ꎮ1.2㊀漏播补偿系统工作原理漏播补偿系统工作过程包括播种状态判断㊁补种动作执行㊁补种区充种3个过程:①播种状态判断ꎮ主排种装置排出的种子由种子检测传感器检测并反馈到控制器ꎬ控制器根据两粒种子实际时间间隔判断播种状态ꎮ②补种动作执行ꎮ漏播发生时ꎬ控制器打开补种管下端的电磁阀ꎬ电磁阀上面的种子落下ꎬ然后关闭电磁阀ꎬ补种动作完成ꎮ③补种区充种ꎮ控制器打开电磁阀的同时驱动补种电机旋转1周ꎬ补种系统排种装置排出1粒种子落到补种管下端电磁阀上面ꎬ种子处于待播状态ꎮ漏播补偿系统各动作时间如图2所示ꎮ种子从主排种装置排出到落至地面总的下落时间tꎬ种子从主排种装置排出到种子检测传感器的下落时间Δt1ꎬ播种状态判断时间Δt2ꎬ电磁阀打开到种子落到地面时间Δt3ꎬ电磁阀动作时间Δt4ꎬ补种器开始动作到种子落到电磁阀上的时间间隔Δt5ꎮ由理论粒距L(m)㊁播种机前进速度vm(m/s)推导出种子从排种器下落的理论时间间隔Δt=L/vmꎮ根据国家标准ꎬ种子粒距大于1.5倍理论粒距称为漏播ꎬ种子粒距不大于0.5倍理论粒距为重播ꎬ则落种状态判断时间Δt2>1.5Δt时判定播种状态为漏播ꎬΔt2ɤ0.5Δt时判定播种状态为重播ꎮ由图2所示:A为播种第N粒种子位置ꎻB为播种第N+1粒种子位置ꎻC为播种第N+2粒种子位置ꎻP为补种机构补种籽粒位置ꎮ漏播发生时B处种子缺失ꎬ补种籽粒与第N粒种子距离LAPꎬ满足0.5L<LAPɤ1.5Lꎬ可以判断为补种成功ꎮ图2㊀漏播补偿系统动作时间示意图Fig.2㊀Actiontimeschematicofthemissseedingcompensationsystem理想的补种状态为补种籽粒与无漏播发生时播种籽粒在同一时刻落到播种位置ꎮ正常播种时种子从主排种装置排出经过种子检测传感器检测区域和排种管落到地面ꎬ漏播发生时若要实现理想补种ꎬ漏播状态判断㊁电磁阀响应㊁待补种子落地这3个动作过程必须在种子从通过种子检测传感器到落到地面这段时间内完成ꎮ当发生连续漏播时ꎬ要保证电磁阀动作前其上面有待补种子ꎬ补种器动作㊁种子下落到电磁阀上面必须要和电磁阀打开㊁补种籽粒落到地面㊁电磁阀关闭同步完成ꎮ该漏播补偿系统在不考虑管壁影响㊁传感器检测响应时间及扰动情况下ꎬ补种系统完成补种ꎬ各动作时间需要满足条件:①t=Δt1+Δt2+Δt3+Δt4ꎬΔt5=Δt3+Δt4ꎻ②补种电机和电磁阀需要在同一时间开始动作ꎮ主排种器速度分析如图3所示ꎮ图3㊀主排种器速度分析Fig.3㊀Speedanalysisofmainrowseedingdevice种子从主排种器排出的速度为v可以分解为水平和垂直两个速度ꎮ电磁阀处的种子为自由落体运动ꎮ种子从主排种器排种口排出到地面的运动时间t㊁种子从主排种器排种口排出到种子检测传感器的下落时间Δt1ꎬ电磁阀打开到种子落到地面时间Δt3ꎬ关系式满足v=ωr(1)vy=vsinα(2)H=vyt+12gt2(3)H1=vyΔt1+12gΔt12(4)H3=12gΔt32(5)式中㊀ω 主排种器排种电机转速(rad/s)ꎻ㊀r 主排种器排种盘半径(m)ꎻ㊀H 主排种器排种口到地面距离(m)ꎻ㊀H1 主排种器排种口到种子检测传感器距离(m)ꎻ㊀H3 电磁阀到地面距离(m)ꎻ㊀α 主排种器投种角度(rad)ꎮ可以得出t=ωrsinα()2+2gH-ωrsinα[]/gΔt1=ωrsinα()2+2gH1-ωrsinα[]/gΔt3=2gH32㊀漏播补偿系统设计2.1㊀硬件电路设计漏播补偿系统以XC3S1200E芯片为核心元件构建控制系统ꎬ主要由传感器电路㊁驱动电路㊁通讯电路及报警电路等组成ꎬ如图4所示ꎮ其中ꎬ传感器电路实现速度㊁落种状态等信号的采集ꎻ驱动电路包括步进电机控制电路和电磁阀开关电路ꎬ主要实现漏播时即时补种和充种ꎻ触摸屏由报警㊁通讯等电路组成ꎬ主要实现参数设置㊁数据显示及报警提示ꎮ漏播补偿系统播种状态检测是补种动作的前提ꎬ自主开发的种子检测传感器采用阵列式硅光电二极管ꎬ监测区域由点阵式变为平面式ꎬ种子落入检测区域ꎬ不会产生漏检ꎮ正常播种时ꎬ传感器产生高低电平交替信号ꎬ通过检测高低电平的间隔时间和中断次数判断漏播状态并进行计量ꎮ种子检测传感器电路如图5所示[4]ꎮ图4㊀漏播补偿控制系统结构框图Fig.4㊀Structureblockdiagramofthemissseedingcompensationsystem图5㊀种子检测传感器电路图Fig.5㊀Circuitdiagramofseeddetectionsensor2.2㊀软件设计漏播补偿系统控制流程图如图6所示ꎮ播种作业开始时ꎬ首先在触摸屏上设定播种粒距ꎬ将漏播数㊁重播数㊁合格数等数据清零ꎮ控制器根据种子检测传感器反馈的脉冲信号判断播种状态ꎬ并进行累加计数ꎬ当检测到有漏播现象发生时ꎬ控制器开启电磁阀并驱动补种电机动作ꎬ并根据落种检测传感器反馈的脉冲信号对补种数进行计量ꎮ程序中的电磁阀开关时间㊁步进电机转速等参数可以在触摸屏上设定ꎮ连续补种作业时ꎬ控制器对漏播次数和补种数行比较运算ꎬ当漏播次数与补种数差值大于4时ꎬ控制器故障报警ꎮ控制程序采用LabVIEW编写ꎬ步进电机控制程序如图7所示ꎮ3㊀漏播补偿系统试验研究3.1㊀试验基本条件漏播补偿系统动作时间t㊁Δt1㊁Δt2㊁Δt3可以根据公式求出ꎬΔt4㊁Δt5通过控制程序进行调节ꎮ为了消除补种动作滞后造成的粒距误差ꎬ实现成功补种ꎬ补种管管口与排种管管口之间的距离ΔL调节范围设定为0.5L~L(L为理论粒距)ꎮ该玉米免耕播种机漏播补偿系统在山东兖州市大华农机试验场进行了田间试验ꎮ该系统安装在2BYFZ-4型玉米免耕精密播种施肥机上ꎬ播种粒距L=20cmꎬ受机械结构限制ꎬ补种系统的电磁阀安装位2019年7月㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀农机化研究㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第7期置距离地面5cmꎬ补种系统排种装置的出种口距离地面30cmꎬΔL=10cmꎮ在大田试验时ꎬ为防止土壤对种子掩埋过深ꎬ造成粒距测量困难ꎬ将覆土机构卸掉ꎬ减少覆土ꎻ为防止种子落到地面时因与地面碰撞发生跳动ꎬ将开沟深度保持在合理深度ꎬ使少量土壤覆盖种子ꎻ为了方便区分播种籽粒和补种籽粒ꎬ使用红色包衣种子作为补种籽粒ꎮ图6㊀漏播补偿系统控制流程图Fig.6㊀Flowchartofthemissseedingcompensationsystem图7㊀步进电机控制程序Fig.7㊀Thecontrolprogramofsteppermotor3.2 试验结果田间试验分别在机具行进速度为5㊁6㊁7km/h下进行试验ꎬ每档行进速度进行10次试验ꎬ每次试验测试距离为30mꎮ试验中ꎬ测出主排种器播种数N㊁漏播数M㊁补种数R㊁补种合格数Q及补种后实际漏播数Sꎮ由表1可以看出:播种机行进速度增加ꎬ机具漏播率增加ꎬ漏播补偿系统的补种率和补种成功率减小ꎮ试验数据表明:安装漏播补偿系统后ꎬ在5~7km/h速度下机具漏播率分别降低了84.23%㊁83.12%㊁78.66%ꎬ播种合格率提升至99.47%㊁99.35%㊁98.75%ꎬ该漏播补偿系统补种性能良好ꎮ表1㊀漏播补偿系统田间试验数据Table1㊀Fieldtestdataofthemissseedingcompensationsystem试验序号播种速度V/km h-15NMRQS6NMRQS7NMRQS11525550157766115610982215066511536660158109733151444015265511531210934148543215466511529872515365511545550154888061525550152544115210107371544440150555015511983续表1试验序号播种速度V/km h-15NMRQS6NMRQS7NMRQS81496533152765215312993915354411547643152111192101555550156554115110991平均值151.75.14.74.30.8153.45.95.44.91.0153.610.39.28.12.2漏播率/%3.363.856.70补种率/%92.1691.5389.32补种成功率/%91.4990.7488.04补后漏播率/%0.530.651.434㊀结论田间试验表明:安装本文设计的漏播补偿系统后ꎬ2BYFZ-4型玉米免耕精密播种施肥机在5~7km/h作业速度下ꎬ平均补种率为91.0%ꎬ平均补种成功率为90.1%ꎬ漏播率平均降低了82.0%ꎮ该漏播补偿系统具有结构简单㊁安装灵活的特点ꎬ若能提高补种电机和电磁阀的响应速度ꎬ补种性能将会进一步提升ꎮ该系统还需要在不同型号播种机上进行试验ꎬ不断优化控制参数和系统结构参数ꎬ相信该漏播补偿系统能够得到推广和应用ꎬ届时将大大降低后期补种作业劳动力成本ꎬ提高播种作业的质量和效率ꎮ参考文献:[1]㊀张平华.基于虚拟仪器的精密排种器漏播检测及补偿技术研究[D].武汉:华中农业大学ꎬ2006.[2]㊀朱瑞祥ꎬ葛世强ꎬ翟长远ꎬ等.大籽粒作物漏播自补种装置设计与试验[J].农业工程学报ꎬ2014ꎬ30(21):1-8. [3]㊀金宏亮ꎬ邱立春ꎬ钱伟.播种机排种监测系统设计与试验研究[J].沈阳农业大学学报ꎬ2010ꎬ41(6):743-746. [4]㊀窦钰程ꎬ欧阳斌林ꎬ陈海涛.光敏式气吸播种机监测装置研究[J].东北农业大学学报ꎬ2010ꎬ41(9):133-136. [5]㊀张锡志ꎬ李敏ꎬ孟臣.精密播种智能监测仪的研制[J].农业工程学报ꎬ2004ꎬ20(2):136-139.StudyontheMissSeedingCompensationSystemofMaizeNo-tillagePrecisionSeederChenGangꎬSunYitianꎬSunYongjiaꎬShenJingxinꎬHeQinghaiꎬLiQinglong(ShandongAgriculturalMachineryResearchInstituteꎬJinan250100ꎬChina)Abstract:Themissseedingcompensationsystemdevelopedinthispaperꎬusesthemethodofwaitingforreseedandfill ̄ingseedinrealtimeꎬthesystemcontrolssolenoidvalveandseed-meteringdeviceofreseedsystemtoachievetimelyre ̄plantingaccordingtotherelationshipbetweenthemovementtimeofreseedingprocess.Thesystemiscarriedoutfieldex ̄perimentꎬusing2BYFZ-4maizeno-tillageprecisionseedingandfertilizingmachineasacarrier.Whenthemissseedingcompensationsystemisinstalledꎬthesowingrateoftheequipmentisraisedto99.47%ꎬ99.35%ꎬ98.75%atthespeedof5-7km/hꎬthereseedperformanceofthemissseedingcompensationsystemiswell.Keywords:no-tillageprecisionseederꎻthemissseedingcompensationsystemꎻreseedactiontimeꎻmaize。
玉米免耕播种机的结构原理与技术优化方向
玉米免耕播种机的结构原理与技术优化方向玉米是世界上最重要的粮食作物之一,而秸秆的免耕播种技术是提高玉米生产效率以及减少对土壤的损害的有效方式。
在这种情况下,玉米免耕播种机的结构原理以及技术优化方向成为一个备受关注的话题。
一、玉米免耕播种机的结构原理玉米免耕播种机是一种用于在玉米田地上实现无需翻耕的种植技术的机械装置。
它一般由种植机构、行走机构、播种器、电力系统、控制系统等部分组成。
1. 种植机构:种植机构是玉米免耕播种机的核心组成部分,它主要包括排土刀、排架、排套、排盘等,其作用是将种子排入地里并覆土。
排土刀的设计高度和角度、排架的压力和行走速度对播种质量有着重要的影响。
2. 行走机构:行走机构是玉米免耕播种机的驱动部分,通常由发动机、变速箱、行走轮等组成。
行走机构的设计应能保证机器的平稳行走以及适应不同地形的要求。
3. 播种器:播种器是用于将玉米种子按照一定密度和深度排入地里的部分。
它通常由种子箱、排种盘、转动部分及调整装置等组成,其结构设计和参数设置直接关系到播种效果。
4. 电力系统:电力系统是玉米免耕播种机的供电部分,通常包括电动机、电磁离合器、电磁制动器等。
在使用中需要保证其运行稳定、能耗低、使用寿命长等特点。
5. 控制系统:控制系统是玉米免耕播种机的智能化部分,通常由传感器、执行机构、控制器等组成。
其主要作用是收集各种传感器的信号并控制执行机构的动作,以实现种植过程中各项参数的自动调整。
二、技术优化方向玉米免耕播种机的技术优化方向主要有以下几个方面:1. 结构设计优化:通过对种植机构、行走机构、播种器等核心部件的设计,提高播种的精度、速度和稳定性,同时减小对土壤的损伤,提高作业效率和播种质量。
2. 控制系统优化:采用智能化控制系统,通过GPS、遥感、传感器等技术实现对播种深度、行走速度以及种子排布密度等参数的自动调整,以提高播种效果和作业效率。
3. 能耗优化:利用新型材料、轻量化设计等技术,减小机器的重量和功率需求,降低机器的能耗并延长使用寿命。
玉米气吸式精密排种器试验研究

202110K 玉米气吸式精密排种器试验研究刘英楠v,衣淑娟b,李衣菲b,陶桂香b,毛欣b,张东明b(黑龙江八一农垦大学y•电气与信息学院;u.工程学院,黑龙江大庆163317)摘要:为明确投种高度、真空度、排种盘转速对气吸式玉米精密排种器的影响,以2BMG系列免耕播种机上配置的QYP-1气吸式玉米精密排种器为研究对象,以投种高度、真空度、排种盘转速为试验因素,以合格率、重播率、漏播率为评价指标,进行三因素五水平二次正交旋转组合试验。
采用多目标优化方法,确定了最佳参数组合为:投种高度265cm、真空度4.3kPe、排种盘转速16.5s/mis时,合格率74.14%,重播率2.48%,漏播率3.33%,作业性能最好。
对优化结果进行验证试验,结果为合格率73.82%、重播率2.56%、漏播率3.62%。
实际结果与优化结果数值差异很小,试验结果准确可信,且各项指标均满足玉米精密播种农艺要求。
关键词:玉米;排种器;气吸式;试验研究中图分类号:S223.2+5文献标识码:A0引言玉米是世界三大主粮之一,目前中国是世界上玉米种植面积最大的国家,但从单产量上来看,我国与单产量位居世界第一的美国还有很大差距,提升的空间还很大[1一4]。
玉米精密播种技术是依据农艺要求,按照一致的行距、株距、深度将种子精确播入土壤,省去间苗等生产环节的高效种植技术,因其具有显著的节本增效优点而得到广泛应用。
精密排种器是实现精密播种的关键部件,已成为国内外学者研究精密播种的重点和热点[5「8]。
王业成等人设计了一种夹持式玉米精密排种器〔2],唐汉等人设计了一种波纹曲面指夹式玉米精密排种器[K],都鑫等人设计了一种内充型孔轮式玉米精密排种器[6]。
虽然新型玉米精密排种器在不断涌现,但专门针对于玉米精密排种器性能研究的报道还未出现。
黑龙江作为我国玉米主产区,由于连年耕种使黑土层变薄,所以一直提倡采用免耕播种技术[12]。
为此,针对北京德邦大为科技有限公司生产的2BMG系列免耕播种机上配置的QYP-1型气吸式玉米精密排种器性能进行了多因素试验研究。
玉米免耕播种机智能化技术应用

摘要:玉米作为重要的粮食作物之一,其免耕播种技术的研究具有重要的意义。
该文以玉米免耕播种机智能化技术为研究对象,对其技术原理、应用场景、优缺点等方面进行了深入分析。
同时,结合实际情况,举例说明了该技术在玉米生产中的应用效果。
通过该文的研究,可以有效促进玉米生产的现代化进程,提高农业生产效率和质量。
关键词:玉米种植;免耕播种;智能化机械玉米种植面积广泛且市场需求量大,但传统的玉米种植方式存在劳动强度大、生产效率低等问题。
为了解决这些问题,免耕播种技术逐渐成为玉米种植的主流方式之一。
在此背景下,玉米免耕播种机智能化技术的研究具有重要的现实意义。
1免耕播种机的发展历程玉米免耕播种机智能化技术是在传统免耕播种技术的基础上,引入了感知技术、决策技术和执行技术,使得免耕播种机具备了智能化、自主化的特点。
下面将分别介绍玉米免耕播种机智能化技术的三个方面:1.1 感知技术感知技术是指将机器视觉、激光雷达、光学传感器等技术引入到免耕播种机中,让机器能够感知环境和自身状态,实现自主导航和目标识别等功能。
其中,影像识别技术是比较常用的一种技术,它能够对地面图像进行处理,将土地、植物和其他障碍物区分出来,从而实现精准定位和导航。
1.2 决策技术决策技术是指将控制算法、人工智能等技术引入到免耕播种机中,使得机器能够根据感知到的信息做出相应的决策。
其中,控制算法技术是一种比较成熟的技术,它能够根据机器感知到的数据,实现对机器的精准控制。
1.3 执行技术执行技术是指将机器执行的能力引入到免耕播种机中,使得机器能够自主完成种植任务。
其中,自主导航和自主驾驶技术比较重要,它能够让免耕播种机在没有人类干预的情况下,完成整个种植过程。
例如,一些智能化的免耕播种机采用了全球定位系统(GPS)和惯性导航系统,能够实现自主导航和自主驾驶,从而提高了种植的效率和精度。
2免耕播种技术存在的问题2.1 精准定位难题玉米免耕播种机智能化技术的核心是对玉米种子进行精准定位。
玉米免耕播种机的结构原理与技术优化方向

玉米免耕播种机的结构原理与技术优化方向玉米免耕播种机是一种用于播种玉米种子的机械设备,它可以实现在不进行传统耕种的情况下完成播种工作。
免耕播种机在农业生产中具有重要的作用,它可以减少劳动力成本、提高播种效率,同时也可以减少土壤的破坏和水土流失。
本文将从玉米免耕播种机的结构原理和技术优化方向两个方面进行探讨。
一、玉米免耕播种机的结构原理1.1 结构组成免耕播种机主要由播种部、排种器、驱动系统、控制系统等组成。
播种部包括种子箱、播种器和下种器,排种器用于调整种子的密度和深度,驱动系统可以是人力、动力或拖拉机等,控制系统用于控制播种机的工作状态。
1.2 工作原理玉米免耕播种机的工作原理是通过排种器调整种子的密度和深度,再利用驱动系统带动播种部进行播种。
种子从种子箱中储存,通过播种器进入排种器,排种器根据需要进行种子调整,然后通过下种器将种子送入土壤中完成播种。
1.3 技术特点玉米免耕播种机的结构简单、使用方便,可以大大减轻农民的劳动强度,提高播种效率。
它可以减少耕作过程中对土壤的破坏,有利于土壤保护和水土保持。
二、玉米免耕播种机的技术优化方向2.1 结构优化在结构方面,可以优化种子箱的设计,增加种子储存容量,减少加注次数;优化排种器的结构,提高种子的传送效率和精准度;优化驱动系统,采用电动或液压驱动,提高播种机的稳定性和可靠性。
2.2 功能优化在功能方面,可以加装种子植保装置,对播种后的玉米进行植保处理,提高玉米的产量和质量;加装土壤施肥装置,对播种后的土壤进行施肥,提高土壤的肥力和保水性。
2.3 控制优化在控制方面,可以采用智能化控制系统,对播种机的工作状态进行实时监测和控制,提高播种机的自动化程度和智能化水平;加装定位系统,实现对播种机的定位和轨迹跟踪,提高播种机的定位精度和作业效果。
2.4 节能减排在节能减排方面,可以采用低功耗的电动驱动系统,减少能源消耗和环境污染;采用高效节水的播种技术,减少水资源的浪费和土壤的侵蚀。
智能化玉米免耕精量播种机设计与调整

智能化玉米免耕精量播种机设计与调整随着智能化的发展和现代化的进行,许多传统的耕作方式已经逐渐被自动化机械所取代。
在农作物播种领域,各式播种机已经逐渐普及,展现出了高效率、节约人力成本等多方面的优势。
文章立足于当下玉米播种机发展现状,基于目前播种机的主要结构和功能,对播种机关键运动部件的运动参数、尺寸等方面提出优化设计思路,旨在提高整机的智能化和可靠性。
最终实现玉米免耕精量播种机工作效率与智能化程度的进一步提高。
标签:智能化;播种机;农业机械;优化设计Abstract:With the development of intelligence and modernization,many traditional farming methods have been replaced by automatic machines. In the field of crop sowing,various types of planters have been gradually popularized,showing the advantages of high efficiency,saving labor costs and so on. Based on the present situation of the development of corn seeder and the main structure and function of the planter,this paper puts forward the idea of optimizing the motion parameters and dimensions of the key moving parts of the planter. The aim is to improve the intelligence and reliability of the whole machine,so that the work efficiency and intelligent degree of maize no-tillage precision corn seeder are further improved.Keywords:intelligent;seeder;agricultural machinery;optimal design前言在农业发展的过程中,自动化机械以其高效率、高可靠性等特点逐渐应用于农作物播种、收割等各个方面,同时劳动力成本随着社会的发展也逐渐变高,因此传统的手工劳作已经逐渐被自动化机械所取代。
关于气吸式播种机设计的文献综述_27(万峰设计文献综述)
中国地质大学长城学院本科毕业设计(论文)文献综述系别:工程技术系专业:机械设计制造及其自动化姓名:卜素伟学号:052075172011 年2月22日关于气吸式播种机设计的文献综述前言气吸式播种机是一种靠负压吸取种子而实现精量播种的播种机。
它与机械式播种机相比,其技术性能具有较强的优势:精播可实现单粒播种,精播可减少种子用量,降低种子成本,一般可节省种子8%—10%;提高播种精密度,经田间实际检测,播种株距合格率可达到87%—94%,明显低于机械精密播种只能达到58%-76%;3.漏播率、重播率明显降低,一般重播率8%—12%,漏播率6%—9%,明显低于机械式播种机;播种适应性强对长圆、扁、大、中、小等各种类型的作物种子都能满足播种要求;对种子几乎不造成伤害;可实现高速播种。
介于气吸式播种机的种种优势,它的出现被称为农业播种技术的革命性创造。
欧美发达国家对气吸式播种机的研究较早,在上世纪50年就开始有气吸式播种机的雏形出现,时至21世纪10年代,国际的气吸式播种技术已达到相当高的水平。
而我国对气吸式播种机的研发较晚些,虽落后于发达国家,但是我们的发展很快,目前无论是从各种产品的实际作业能力,还是从新的核心技术的研发,我们都取得了卓越的成就。
1.国外气吸式播种机的研究现状国外己对气吸式精密播种机进行了长期的研究,结构样式多种多样,满足了中耕作物和某些蔬菜播种的农艺要求,并己实现系列化、标准化和通用性。
气力式精密播种机按排种原理的不同可分为气吸式、压式和气吹式等种类播种机。
许多农业先进的国家在50年代就开始推广使用气吸式、压式和气吹式等种类播种机。
如南斯拉夫的泼尼玛什一2型气吸式播种机的排种机构采用气吸式垂直圆盘式,盘的一面是真空室与风机吸风口相连,使种子室产生负压。
盘的另一面是种子室,作业时排种盘旋转,吸孔在充种区吸附种子,经过刮种器刮掉多余的种子,从而使每个吸孔只保留一粒种子在开沟器上方转出真空室,吸力消失,种子靠自重下落到种沟里。
玉米免耕播种机的结构原理与技术优化方向

玉米免耕播种机的结构原理与技术优化方向随着农业机械化的不断推进,玉米免耕播种机成为了玉米种植中不可或缺的设备之一。
玉米免耕播种机的结构原理与技术优化方向,对于玉米免耕播种机的操作、维护和改进都具有很大的指导意义。
1. 玉米免耕播种机的整体结构玉米免耕播种机一般由刨土器、撒肥器、播种器、垄形器、压实器、旋耙等主要部件组成。
其中,刨土器用于清理田地表面的秸杆和杂草,撒肥器用于定量撒布肥料,播种器用于将玉米种子均匀地播种到田地里,垄形器用于形成田垄,压实器用于将田垄压实,旋耙用于平整田地表面。
玉米免耕播种机的工作原理是将各个部件的功能进行有机的结合,通过一套完整的工作流程来完成玉米无土深松、播种、压实等一系列功能。
具体来说,玉米免耕播种机在工作时,先通过刨土器将田地表面的秸杆和杂草清理掉,然后再通过撒肥器将肥料撒布到田间,接着通过播种器将玉米种子均匀地播种到田地里,再通过垄形器形成田垄,通过压实器将田垄压实,并最后通过旋耙将田地表面平整。
1. 确保播种均匀性玉米免耕播种机的播种均匀性是影响作物生长质量的关键因素之一。
通过对播种机的机械结构进行改进,可以提高播种均匀性。
又如,在播种机的设计中设置种子落地槽,并通过控制落地槽的弹性和直径等参数来调节播种量的大小和均匀性,以确保全面覆盖和灌溉性好。
2.提高机械适应性和使用寿命3. 实现全方位智能化控制目前,玉米免耕播种机正在逐渐走向智能化。
今后,智能化控制将成为玉米免耕播种机发展的重要方向之一。
利用先进的硬件设施和软件技术,在掌握精准播种、田间实时检测、无线遥控等多种特性的基础上,实现全方位、高效、精准的智能化控制,可以更好的为农民提供更加灵活、节能、环保、高效的操作手段。
结论玉米免耕播种机的结构原理与技术优化方向是为了更好地实现玉米免耕种植的目标而进行的研究方向。
在未来,随着技术水平的不断提高,玉米免耕播种机将会更加便于操作、更加智能化、更加环保等优化方向,为农业机械化的发展奠定更加坚实的基础。
玉米免耕播种施肥机精准作业实现变量施肥和精密播种

玉米免耕播种施肥机精准作业实现变量施肥和精密播种作者:来源:《科技传播》2011年第20期中国目前玉米生产存在资源利用率低、投入产出率低的现象,精准播种、精准施肥是精准农业主要的技术环节,是保证丰产丰收的基础。
本文根据免耕播种施肥机的特点,设计了播种粒距调节自动控制系统以及基于步进电机的排肥量反馈控制系统,取得了良好的实验效果。
随着农村土地承包经营权流转的深入,农业生产越来越需要规模化经营。
中国目前农业生产普遍存在资源利用率低、投入产出率低的现象,使得目前的生产模式亟待革新。
精准农业通过获取农田小区作物产量分布及影响作物产量的因素的空间及时间差异性信息,分析原因,并采取有效的调控措施,按需实施调控,实现生产效率的提高和环境的可持续发展。
精准播种、精准施肥是精准农业主要的技术环节,是保证丰产丰收的基础。
精准播种可以大量节省种子,播种玉米可节约40~45公斤每公顷,棉花可节约75公斤每公顷,大豆可节约22.5公斤每公顷,谷子可节约4.65公斤每公顷;此外,还可以节省间苗工时或完全省去间苗工序,使作物苗齐、苗壮,营养合理,植株个体发育健壮,群体长势均衡,增产效果显著。
精准施肥通过测量土壤养分含量,按需施肥,在节约肥料的同时,起到环境保护的作用。
为了提高播种精度,设计了变量播种反馈控制系统,以及按处方图精准施肥控制系绕。
该系统在播种机上安装全球定位系统(GPS)接收机、排种管和排肥管检测传感器、种箱和肥箱质量传感器、传感器采集模块、排种轴和排肥轴转速控制电机、电机控制模块、霍尔测速传感器等装置。
安装在播种机上的车载计算机、变量播种反馈装置和精准施肥控制装置、车载GPS 定位导航系统、变量播种反馈装置及精准施肥控制装置分别通过车载信号处理电路与车载计算机连接。
在排种管和排肥管上安装压力传感器和电容传感器,检测实施播种量和施肥量,上位机采集信息并与期望的播种量和施肥量对照,计算偏差,根据车辆行走速度,输出排种轴排肥轴期望转速,控制电机实现变量播种和变量施肥。
播种机的类型和构造实验

种子箱
合成种子与空气旳混合物, 沿垂直气送增压管路向上
输送,经褶皱式扩压管增
排种定量器 压进入气流分子流均等旳分为若干细
种子流,沿多种子输送管
输送至开沟器,实现气流
统一输送旳一器多行排种。
离心风机
④锥盘式排种器
工作原理:种子在锥面型孔 盘旳旋转带动下,靠重力和 离心力作用沿斜面下滑。充 斥圆周旳平面环带,一部分 进入型孔随圆盘转动,多出 旳种子被刮种器推下,沿输 种管排出。
磨盘与种子筒底座之间留有一定间隙,磨盘回转时,在离心力及磨纹 推力作用下,使种子由中心向外移动,从种子筒底座上旳排种口处强制排 种。多出种子在磨盘边沿处按螺旋线方向上升,再经过磨盘上旳喂入口进 入排种间隙。
磨盘式排种器构造示意图 1.种子筒 2.立轴 3.磨纹盘 4.排种孔盘 5.排种器底座
棘轮式排种器:构造及工作原理与外槽轮式排种器基本一 致,利用钉轮旳转动将种子排出 。
1.棘轮 2.种子箱 3.插板 4.排种舌
(3)气吸式排种器构造及工作原理
视频
工作原理:它由吸种盘、搅 拌轮、吸气管、吸气室和风 机等构成。吸气室经过吸气 管道与风机相连。当风机吸 气时,在吸种盘旳两面便形 成压力差,吸种盘上旳吸种 孔便成为气流通道。种子受 吸力旳作用被吸附在吸种孔 处,吸种盘转动,带有吸附 种子旳吸种孔在经过刮种器 时,多出旳种子被刮去,并 确保吸种孔吸住一粒种子。 当带有种子旳吸种孔转到吸 气室以外之后,种子失去了 吸附力,靠自重经输种管落 入种沟内。
(4)观察滑刀式开沟器旳构造 滑刀式开沟器
芯铧式开沟器
返回目录
(5)观察星轮式排肥器旳构造﹑工作原理及排肥量调整措施。
(6)观察圆盘式﹑锄铲式开沟器旳构造﹑起落机构及其 深浅调整机构旳构造及播深调整措施。
2BMQJ6型气吸式玉米免耕播种机的研制
0 引言
保护性耕作技术 具有保 墒 、 增加土壤 肥力 , 减少 水蚀和风蚀 、 抑制沙尘暴 , 减少作业工序 、 降低作业成 本和增加农 民收入等显著 的经济 、 社会 与生态 效益 , 是 现代 农 业 的发 展 方 向 ¨ 2。 -]
我 国 已经 研 究 保 护 性 耕 作 技 术 模 式 长 达 十 几 年 之久 。 中 国实 际 国 情 是 农 村 地 块 小 , 民 收 入 水 平 农 低, 拖拉 机 功 率 不 高 , 护 性 机 具 的探 索 一 直 朝 着 消 保
机 、 印 器 、 种单 体 、 肥 系统 和 传 动 系统 等 组 成 , 一次 性 完 成 破 茬 、 肥 、 沟 、 种 、 土 、 压 等 作 业 。 田 划 播 施 可 施 开 播 覆 镇 间试 验结 果 表 明 : 机 的 粒距 合 格 指 数 ≥8 % , 播 指数 ≤1 % , 播 指 数 ≤5 , 子破 损 率 ≤0 5 , 能 指 标 该 5 重 O 漏 % 种 .% 性
外 形 尺寸 ( ×宽 ×高 ) m 19 0×4 5 0 X 长 / m: 4 0
1 870
整 机 质量/ g9 4 k :4
要求较高 , 在工作性能上 尚未达 到真 正满足播 种质量 的农艺要求 , 且播种 生产率 不高 , 适应 性较差 。针 对
上 述 问题 , 中机美 诺 科 技 股 份 有 限公 司研 制 开发 了 一 种 对 种 子 尺 寸 要 求 低 、 应 性 强 的 用 于 小 麦 收 适
行 距/ m:5~ 0 c 4 7 种 箱 容积/ :2 L 3 肥 箱 容积/ :2 L 30
耗功率少 、 作业 面积小 、 工作灵 活 的悬 挂式小 型机具 的方 向努力 , 现在 技 术 研 究 相 对 比较 成 熟 。而 在 一 些 大地块上 , 相应成熟 的大 型机具 比较少 , 机具作 业效
铲式玉米精密播种机振动特性模型建立与试验
铲式玉米精密播种机振动特性模型建立与试验
张晓冬;李成华;李建桥;邹猛
【期刊名称】《农业机械学报》
【年(卷),期】2014(45)2
【摘要】为了研究铲式玉米精密播种机播种性能与农田不平度激励产生振动之间的关系,推导了稳态响应与理论粒距关系数学模型.由建立的数学模型得出铲式玉米精密播种机的播种性能主要由播种机的结构特征、播种机工作速度、倾斜圆盘勺式玉米精密排种器与耕作土壤表面间的距离、土壤不平度和土壤粘性决定.理论粒距与实际粒距的对比结果表明,两者分布趋势基本相同,建立的稳态响应与理论粒距关系数学模型可用于对工作状态下播种机的播种性能进行预测和分析.
【总页数】6页(P88-93)
【作者】张晓冬;李成华;李建桥;邹猛
【作者单位】吉林大学工程仿生教育部重点实验室,长春130025;沈阳理工大学机械工程学院,沈阳110168;吉林大学工程仿生教育部重点实验室,长春130025;吉林大学工程仿生教育部重点实验室,长春130025
【正文语种】中文
【中图分类】S223.2.5
【相关文献】
1.铲式玉米精密播种机振动特性试验 [J], 张晓冬;李成华;汤秋艳;杨宇;马颖
2.铲式玉米精密播种机三维参数化设计 [J], 杨宇;李成华
3.铲式玉米精密播种机振动对播种质量影响的试验 [J], 王颖;李成华;王慧慧
4.基于实例推理的铲式玉米精密播种机设计 [J], 杨宇;李成华;张国梁
5.指夹式玉米免耕精密播种机振动特性及对排种性能的影响 [J], 王奇;朱龙图;李名伟;黄东岩;贾洪雷;庄健
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
架、 机架 、 四连杆 仿 形机 构 、 种开 沟器 、 播 施肥 开沟 器 、 镇压 轮 、 排种 机构 、 传动 机构 、 肥箱 等组 成 。采 用 双梁
结 构 . 肥 开 沟 器 与播 种 开 沟 器分 别 安 装 在 前 、 横 施 后
粱上 。
的玉米 免耕精 密播种 机很 少 。且该 地 区玉米 种植 时秸 秆量大、 地表 不平 、 秆 不腐 烂 等 问题 的存 在 , 秸 现有 机 具 易 于壅 土 、 塞 , 过性 差 , 成漏 播 和播 种 不均 匀 堵 通 造 等 现象 , 种质 量很难 保证[, 。 播 35 ,, 46 q
0 引 言
东 北地 区种 植 结 构 单 一 , 米播 种 面积 大 , 田 玉 农
型品种 , 实施 免耕播种 、 学除草 、 化 深松 深施 肥 , 年年 高
留 茬 还 田 , 年 一 次 秸 秆 粉 碎 还 田覆 盖 [1针 对 三种 种 三 7。 , 8
植 模 式 的共 性 特 点 ,B X- 6型 玉 米 免 耕 机行 距 可 2Q -
地 区秸 秆全 量还 田条件下 玉 米免 耕播 种设 计 的 。 该机 型行 距 、 株距 可 调 。 机结 构如 图 1所示 , 整 主要 由悬挂
田循 环生 产 , 则秸 秆 还 田 、 免耕 复式 作 业 是 有 效 的方
式之 一 【l 1。 , 2 我 国各地 区玉米 种植模 式不 同 ,适用 于东北 地 区
目前东 北地 区玉米 种植 面积最 广 的是吉林 省 。该
该 机 主要 特 点 ห้องสมุดไป่ตู้ 采 用 气 吸 式排 种器 实 现 单 粒 播
种, 大直 面 圆盘 施肥 开沟器 实现化 肥深施 , 纹 圆盘 破 波 茬开沟 、双 圆盘开 沟器播 种 , V型 橡胶 轮覆 土镇压 , 实
现 了玉 米 的免耕 精 密播种作 业工 序 。通 过调 换变速 箱 链 轮与 地轮链 轮 的组 合而 改变传 动 比 ,实现 不 同株 距
基 础 设 施 薄弱 目前农 作 物种 植 主要 特 点 是 大 量 使
用 化 学 肥 料 , 机 物还 田少 , 型 农 业 机 械 多 , 作 有 小 耕
调. 可适 应不 同种植模 式 的免耕种 植要 求 。
方式 落后 , 土地 水 土流 失 和 养 分 消耗 量 大 , 层 变 黑 耕
浅 , 底 层 坚 硬 , 水 保 肥 能力 减 弱 , 御 旱 涝 能 力 犁 保 抗 和耕 地 质 量 急 剧 下 降 , 成 粮食 减 产 , 民减 收 。 为 造 农 防 止 黑 土地 退 化 。 持 并 提 高 粮食 生 产 能 力 , 现农 保 实
1 整 机 结构
2 Q - 6型玉 米 免 耕 精 密播 种 机 主要 是 为东 北 B X-
中 图分 类号 :2 3 + ¥2 . 4 2
文 献标 识 码 : A
d i1. 6 ̄i n10 — 2 5 0 0 .1 o:03 9 .s. 6 7 0 . 1. 0 9 9 s 0 2 15
刘立 晶, 长 荣, 军平 , 忠 军 , 振华 . B X 6型 玉 米 免耕 精 密 播种 机 研 制【 . 国农 机 化 , 0 1 ( : 6 7 李 周 刘 贾 2Q 一 J 中 】 2 1 ,5 7- 9 ) LU L-ig L h n-og Z UJ n pn, I hn -t ,I hn h a D s nadepr n n2 Q - 0tl on I ij , I ag rn, HO u - ig LU Z o gjn J Z e - u . ei n xei t B X 6n 一i i— n C i A g me o lc peio edrJ C ieeA r u ua Mehnzt n 2 1,5: 6 7 rcs nsee [. hns g cl rl ca i i , 0 ()7 - 9 i 1 i t ao 1
机 采用 气 吸式 精 密排 种 器 实现 玉 米 单粒 排 种 ; 直面 圆 盘施 肥 开 沟器 深 施 化肥 、 纹 圆盘 与 双 圆 盘组 合 播 种 开沟 器 播 种 。 大 波 完
成 了种 肥分 施作 业 。试 验 结果 表 明 : 种 粒距 合格 率 9 . %, 种深 度 、 播 07 播 9 施肥 深 度合 格 率均 为 1 0 0 %。该 机 作业 性能 与 国外 同 类产 品相 当 。 价格 比其 降低 6 %~ 0 0 7 %。 关键 词 : 免耕 精 密播 种机 ; 护 性耕 作 ; 吸式 排种 器 ; 保 气 圆盘 开沟 器
的调整 。
省 区玉米保 护性 耕作 主要推 行大垄 双行 、等行 距 沟 台
互作 和垄侧 播种 三种技 术模 式 ,基本 技 术是种 植 耐密
收稿 日期 :0 0年 5月 3 21 1日
修 回 日期 : 0 0年 7月 2 2l 3日
基 金 项 目: 国家 “ 一 五 ” 技支 撑 计 划 项 目( 0 7 A 8 B 4 和 国家 科 技 支撑 计 划 课 题 ( 0 9 A B B 3 十 科 20B D 9 0 ) 20 B D 5 0 ) 刘 立晶 , , 9 6年 生 , 族 , 龙 江 庆 安人 , 女 17 满 黑 工学 博 士 , 国农 业机 械 化 科 学研 究 院 研 究员 ; 中 研究 方 向为 保 护性 耕 作 技 术及 装 备 。
2 1 年第 5期 01 总 第 2 7期 3
中国农机 化
Chne eAg c tr lMe h nz to i s r ul a c a ia in i u
No5 011 .,2 Toa .3 tlNo2 7
2 QX B 一6型 玉米 免耕 精 密播 种 机研 制
刘立 晶 , 长 荣 , 军平 , 忠军 。贾振 华 李 周 刘 ,
(. 1 中国农 业机 械化科 学研究 院 , 北京 市 ,0 0 3 2 现代农 装科 技股份 有 限公 司 , 京市 ,0 0 3 10 8 ;. 北 10 8 ;
3 土壤 植物机 器 系统 技术 国家重 点实验 室 , . 北京 市 ,0 0 3 10 8 )
摘 要 : 对东 北农 作 物秸 秆 还 田模 式 的技 术需 求 , 能减 排 、 简单 为理念 , 计 了 2 Q -6型玉 米 免耕 精 密播种 机 。该 针 以节 结构 设 BX