一种嵌入式微调度器的实现方法
TinyOS任务调度的研究与改进
TinyOS任务调度的研究与改进李明,丁恩杰中国矿业大学信电学院,江苏徐州(221008)E-mail:lmsiee@摘要:本文介绍了TinyOS任务调度机制,指出TinyOS调度策略的特点及不足。
采用一种改进式NPEDF算法对TinyOS的调度器进行实时性改造,并详细描述了具体改进方案。
实验测试的结果证明了这种改进策略的有效性。
关键词:TinyOS,任务调度,实时性,NPEDF中图分类号:TP316.891.引言传感器技术、嵌入式计算技术、微电子技术、无线通信技术以及半导体与微机电系统制造技术的飞速发展和相互融合使得具有感知、计算和通信能力的低功耗多功能无线传感器网络得以实现。
近年来,无线传感器网络(WSN-Wireless Sensor Networks)被广泛应用于国防军事、国家安全、环境科学、交通管理、医疗卫生、反恐、灾害监测等领域[1]。
无线传感器网络操作系统(WSNOS)是无线传感器网络的支撑技术之一。
它是WSN 应用程序的基本软件环境,核心是任务调度。
目前面向无线传感器网络的操作系统主要有TinyOS、MANTIS OS[2]、SOS、SenOS[3]、PEEROS[4]等,其中最为流行的是加州大学伯克利分校开发的TinyOS[5]。
它采用基于组件的架构方式,在传感器网络天生就严格限制内存的条件下,可以用最小代码快速来创新和实现各种应用。
目前,它已经被成功的应用到多种硬件平台上,具有很高的应用价值和研究意义。
本文主要研究了TinyOS现有的任务调度策略,在分析出应用TinyOS可能存在的问题的基础上,结合嵌入式实时操作系统的相关理论,提出了一种改进式NPEDF算法,并用这种算法对TinyOS调度器进行实时性改造。
最后,通过实验对改进前后的TinyOS进行测试,以此来验证本文采用的调度算法对无线传感器网络通信性能的影响。
2.TinyOS 2.0任务调度策略TinyOS 2.0采用任务和事件驱动相结合的两级并发模型,任务调度策略采用简单的先进先出(FIFO)算法。
freertos例程
freertos例程FreeRTOS是一个现成的,免费的,可移植,嵌入式实时操作系统,它可以在没有操作系统的嵌入式系统中运行。
它的核心是一个小的调度器,可以把计算机处理器的资源分配给任务,根据不同的任务优先级进行调度。
它最初由 Richard Barry Real Time Engineers Ltd 发,并在 2001发布。
FreeRTOS一款开源操作系统,可用于 8 位, 16 位, 32 位处理器以及迷你以及微型机,内核大小只有几百KB。
FreeRTOS编程模型被称之为“任务”,在这个模型中,任务可以被概括为“工作者”,它们可以在系统中被分配到不同的 CPU心或者是多核芯片上,这些任务可以互相的沟通也可以定义合作的任务,它们是可以被调度器进行切换的,可以根据不同的需要进行优先级控制。
FreeRTOS包括一个资源管理模块,可以帮助任务之间进行同步。
FreeRTOS许开发者们使用例程”(Routine)来使得嵌入式系统的软件开发更加简单,任务被分解成若干的部分,采用了例程的设计模式,就像它的名字一样,一个例程就是一个有着特定功能的功能模块。
使用例程,开发者可以把一个系统中的不同部分组合在一起,以实现一个真正的系统。
FreeRTOS 中的例程大致可以分为三类:标准例程,特定任务例程和用户例程。
标准例程是由系统提供的,比如分配内存,实现任务间通信和同步等等。
特定任务例程则是由用户实现的,比如实现定时任务,设备驱动或者数据处理等等。
最后,用户例程是由用户实现的,比如实现并发任务,状态机和各种自定义的复杂功能。
FreeRTOS 例程使得嵌入式软件的开发变得更加容易,也更安全,而且可以确保程序的高效执行。
它提供了一种非常有效的方法去实现任务的分解,使得程序变得更容易维护,也更容易扩展。
FreeRTOS例程也改变了嵌入式系统的开发,它解决了复杂的多任务系统的开发,简化了嵌入式系统的设计和实现,促进了嵌入式系统软件的发展。
RTOS低功耗设计原理及实现_TicklessMode(FreeRTOS的实现)
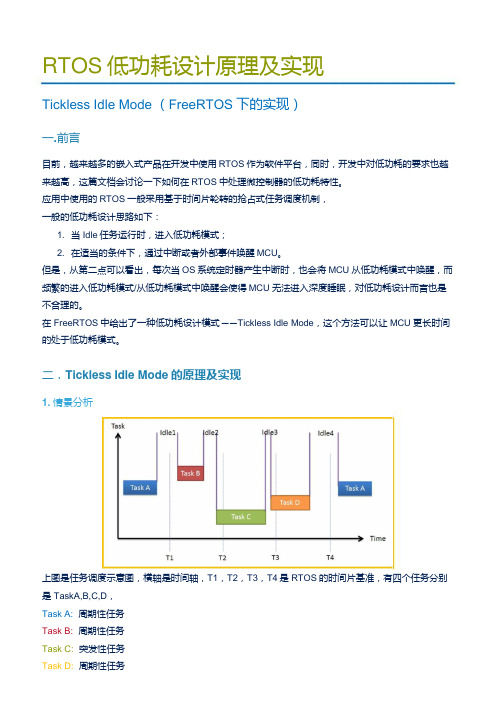
1. 当 Idle 任务运行时,进入低功耗模式; 2. 在适当的条件下,通过中断或者外部事件唤醒 MCU。 但是,从第二点可以看出,每次当 OS 系统定时器产生中断时,也会将 MCU 从低功耗模式中唤醒,而 频繁的进入低功耗模式/从低功耗模式中唤醒会使得 MCU 无法进入深度睡眠,对低功耗设计而言也是 不合理的。 在 FreeRTOS 中给出了一种低功耗设计模式 ——Tickless Idle Mode,这个方法可以让 MCU 更长时间 的处于低功耗模式。
portNVIC_SYSTICK_CTRL_REG = portNVIC_SYSTICK_CLK_BIT | portNVIC_SYSTICK_INT_BIT | portNVIC_SYSTICK_ENABLE_BIT;
/* 进入低功耗模式,可以通过 configPRE_SLEEP_PROCESSING 函数进行低功耗模式下 时钟及外设的配置*/
xModifiableIdleTime = xExpectedIdleTime; configPRE_SLEEP_PROCESSING( xModifiableIdleTime ); if( xModifiableIdleTime > 0 ) {
__DSB(); __WFI(); __ISB(); }
unsigned long ulReloadValue, ulCompleteTickPeriods, ulCompletedSysTickDecrements; portTickType xModifiableIdleTime;
嵌入式系统开发平台核心层进程调度的设计与实现
嵌入式 系统开发 平 台核心层进程调度的设计与实现
胡 晓辉 ,邵 峰 晶 ,孙 仁 诚
( 岛 大学信 息工程 学院 ,山东 青 岛 2 6 7 ) 青 6 0 1
摘要 : 对嵌 入式 系统 开发 平 台 中进 程调 度 实 时性 差 的问 题 , 出 了一 种 提 高进 程 调 度 针 给 实时性 的设 计方 案 。详细 分析 了嵌 入式 系统 开 发 平 台 的进 程状 态 及 其 转换 过 程 , 给出 了
嵌入式系统中的实时操作系统调度算法

嵌入式系统中的实时操作系统调度算法嵌入式系统是一种特殊的计算机系统,其设计目标是在特定的应用领域内提供高度可靠和实时的性能。
实时操作系统(RTOS)是嵌入式系统中常用的操作系统类型,它以管理任务和资源的方式为应用程序提供服务。
实时操作系统中的任务调度算法起着至关重要的作用,它们决定了任务执行的顺序和优先级,直接影响系统的实时性能和稳定性。
实时操作系统中常用的任务调度算法包括时间片轮转调度(Round-Robin Scheduling)、优先级调度(Priority Scheduling)、最早截止时间优先调度(Earliest Deadline First Scheduling)等。
每种调度算法都有其自身的特点和适用场景,下面将逐一进行介绍。
1. 时间片轮转调度算法时间片轮转调度算法是实时操作系统中最常见的调度算法之一。
它基于任务的优先级,为每个任务分配一个固定长度的时间片,并按顺序轮流执行任务,每个任务在一个时间片内执行完毕后转移到下一个任务。
当时间片用尽时,下一个任务将获得执行机会。
这种调度算法保证了每个任务的执行时间相对均匀,避免了某个任务霸占资源而导致其他任务无法运行的情况。
时间片轮转调度算法适用于任务的执行时间相对较短和相对平衡的场景,对于响应时间要求较高的实时系统非常有效。
然而,当任务的执行时间差异较大或任务的数量过多时,时间片轮转调度算法可能会导致任务响应时间的不确定性,不适用于要求确定性响应时间的实时系统。
2. 优先级调度算法优先级调度算法是一种简单而直观的调度算法,它为每个任务分配一个优先级,并按照优先级顺序进行调度,具有较高优先级的任务将优先执行。
在实时操作系统中,任务的优先级通常由开发者根据任务的重要性、对实时性的要求和资源的需求等因素进行设定。
优先级调度算法适用于对任务执行时间要求相对灵活的实时系统。
这种调度算法在任务完成时间较长的情况下可以保证重要任务先执行,但是如果任务的数量过多或优先级设置不当,可能会导致低优先级任务长时间等待的情况,从而影响系统的实时性。
嵌入式实时操作系统μCOS原理与实践1

4、文件管理:
对外存中信息进行管理的文件系统
关于μC/OS-II
•UCOSII 是一个可以基于ROM 运行的、可裁减的 、抢占式、实时多任务内核,具有高度可移植性, 特别适合于微处理器和控制器,是和很多商业操作 系统性能相当的实时操作系统(RTOS)。为了提供 最好的移植性能,UCOSII 最大程度上使用ANSI C 语言进行开发,并且已经移植到近40 多种处理器 体系上,涵盖了从8 位到64 位各种CPU(包括DSP) 。
• 事件
两个任务通过事件进行通讯的示意图所示:
注释:任务1 是发信方,任务2 是收信方。任务1 负责把信息发送到 时间上,这项操作叫做发送事件。任务2 通过读取事件操作对事件进 行查询,如果有信息则读取,否则等待。读事件操作叫做请求事件。
事件控制块(ECB)
• 为了把描述事件的数据结构统一起来,UCOSII 使用叫做事件控制 块(ECB)的数据结构来描述诸如信号量、邮箱(消息邮箱)和消息 队列这些事件。事件控制块中包含包括等待任务表在内的所有有关 事件的数据,事件控制块结构体定义如下: • typedef struct { INT8U OSEventType; //事件的类型 INT16U OSEventCnt; //信号量计数器 void *OSEventPtr; //消息或消息队列的指针 INT8U OSEventGrp; //等待事件的任务组 INT8U OSEventTbl[OS_EVENT_TBL_SIZE];//任务等待表 #if OS_EVENT_NAME_EN > 0u INT8U *OSEventName; //事件名 #endif } OS_EVENT;
UCOSII中与任务相关的几个函数
1) 建立任务函数
嵌入式系统课程设计题目

嵌入式系统课程设计题目1.ARM系统在LED显示屏中的应用(利用ARM系统控制彩色LED显示屏)2.ARM-Linux 嵌入式系统在农业大棚中的应用(温度、湿度和二氧化碳浓度是影响棚栽农作物生长的3 大要素。
为了实现农业大棚中这3 种要素数据的远程实时采集,引入了当前嵌入式应用中较为成熟的ARM9 微处理器和Linux 嵌入式操作系统技术, 采用温度传感器PH100TMPA、湿度传感器HM1500 和二氧化碳浓度传感器NAP221A ,设计一种基于TCP/ IP 协议的嵌入式远程实时数据采集系统方案。
从硬件设计和软件实现2方面对该系统进行具体设计。
)3.ARM 嵌入式处理器在智能仪器中的应用(设计一种基于ARM 嵌入式处理器系统的智能仪器的硬件和软件设计方案, 并结合uc/o s2II或者Linux嵌入式实时操作系统, 给出一套完整的任务调度和管理的方法, 最后用实例说明)4.ARM系统在汽车制动性能测试系统中的应用(采用ARM系统构建一个路试法的汽车制动性能测试系统)5.ARM 嵌入式控制器在印染设备监控中的应用(针对拉幅热定型机,设计一种基于485 总线的分布式监控系统。
用ARM 嵌入式控制器实现主、从电机的同步运行和烘房温度的控制;在PC 机上用VB6. 0 设计转速和温度的监控画面;实现ARM、变频器和PC 机之间的数据通信。
)6.基于ARM系统的公交车多功能终端的设计(完成电子收费、报站、GPS定位等功能)7.基于ARM9的双CAN总线通信系统的设计(设计一种基于ARM9内核微处理器的双路CAN总线通信系统。
完成系统的总体结构、部分硬件的设计,系统嵌入式软件的设计,包括启动引导代码U - boot、嵌入式L inux - 操作系统内核、文件系统以及用户应用管理软件四个部分。
)8.基于ARM9 和Linux 的嵌入式打印终端系统(嵌入式平台上的打印终端的外围电路连接设计、嵌入式Linux 的打印机驱动程序开发和应用程序的开发)9.基于ARM 的车载GPS 终端软硬件的研究(重点研究基于ARM 的导航系统的软硬件设计)10.ARM系统在B超系统中的应用(完成系统软件硬件设计,包括外围电路)11.基于ARM 的嵌入式系统在机器人控制系统中应用(提出一种基于ARM、DSP 和arm-linux 的嵌入式机器人控制系统的设计方法, 完成控制系统的功能设计、结构设计、硬件设计、软件设计)12.基于ARM的视频采集系统设计(完成系统软件硬件设计,包括外围电路,采用USB接口的摄像头)13.基于ARM的高空爬壁机器人控制系统(构建一种经济型的爬壁机器人控制平台, 与上位机视觉定位和控制系统结合,使其适用于导航与定位、运动控制策略、多机器人系统体系结构与协作机制等领域。
rt-thread 线程调度原理

一、概述RT-Thread是一个开源的嵌入式实时操作系统,它具有微内核架构和高度可裁剪性。
在RT-Thread中,线程调度是实现多任务处理的关键部分。
本文将介绍RT-Thread的线程调度原理,以及其在实时操作系统中的应用。
二、RT-Thread线程调度概述1. 线程在RT-Thread中,线程是进行任务调度和管理的基本单元。
每个线程都具有自己的堆栈空间和上下文环境。
通过线程的创建、运行和销毁,实现对各种任务的分配和调度。
2. 线程调度器线程调度器是RT-Thread的核心组件之一,负责根据线程的优先级、状态和时间片等信息对线程进行调度,以确保系统中的各个任务得到合理的执行。
3. 调度策略RT-Thread中采用了优先级抢占式调度策略,即优先级高的线程可以抢占优先级低的线程的CPU资源。
这种调度策略能够确保高优先级任务的及时响应,并且避免了低优先级任务长时间占用CPU资源的情况。
三、RT-Thread线程调度原理1. 线程控制块(TCB)每个线程在RT-Thread中都有对应的线程控制块(TCB),TCB中保存了线程的状态、优先级、堆栈指针和其他运行时信息。
线程被创建时,系统会为其分配对应的TCB,并将其加入到就绪队列中。
2. 调度器调度器是用来决定哪个线程获得CPU资源并运行的组件。
RT-Thread 中的调度器会根据线程的优先级和当前状态,选择合适的线程进行调度。
3. 就绪队列和延迟队列就绪队列是存放所有可运行线程的队列,而延迟队列是存放因某种原因暂时不能运行的线程的队列。
调度器会根据优先级从就绪队列中选择线程进行调度,而延迟队列中的线程则会在满足条件后被移动到就绪队列中。
四、RT-Thread线程调度实现1. 自旋锁在RT-Thread中,为了保证线程调度的原子性,通常会使用自旋锁来进行线程的互斥访问。
使用自旋锁可以确保在多线程环境中对共享资源的访问不会发生冲突。
2. 中断在嵌入式系统中,中断是一种常见的事件响应机制。
嵌入式系统中的RTOS设计与优化方法研究
嵌入式系统中的RTOS设计与优化方法研究嵌入式系统是一种特殊的计算机系统,它被嵌入到其他设备中,用于控制、监测和执行特定的任务。
在嵌入式系统中,实时操作系统(RTOS)的设计和优化是至关重要的。
RTOS是一种能够满足实时任务要求的操作系统,它需要在有限的资源下提供可靠的任务调度和响应能力。
本文将探讨嵌入式系统中RTOS设计与优化的方法。
一、RTOS设计原则在设计嵌入式系统中的RTOS时,有几个原则需要遵循。
首先,RTOS应该具备可预测性。
这意味着任务的执行时间应该是可预测的,以便系统能够满足实时任务的要求。
其次,RTOS应该具备可靠性。
在嵌入式系统中,任务的可靠性是至关重要的,因为系统可能会面临各种不可预测的环境和故障。
最后,RTOS应该具备高效性。
在资源有限的情况下,RTOS需要提供高效的任务调度和管理,以确保系统的性能。
二、任务调度算法任务调度是RTOS设计中的关键问题之一。
常见的任务调度算法有先来先服务(FCFS)、最短作业优先(SJF)、优先级调度和轮转调度等。
在嵌入式系统中,优先级调度是最常用的调度算法。
通过为任务分配优先级,RTOS可以根据任务的优先级来进行调度,以确保高优先级任务的及时响应。
此外,还可以采用抢占式调度和非抢占式调度相结合的方式,提高系统的灵活性和响应能力。
三、资源管理与共享在嵌入式系统中,资源管理和共享也是一个重要的问题。
RTOS需要能够有效地管理系统中的各种资源,包括处理器、内存、外设等。
资源管理的关键在于避免资源冲突和竞争。
RTOS可以通过引入互斥锁、信号量和消息队列等机制来实现资源的共享和保护。
此外,还可以采用优先级继承和优先级反转等技术,解决资源竞争导致的死锁和优先级反转问题。
四、中断处理在嵌入式系统中,中断处理是实时性的关键。
RTOS需要能够及时响应各种中断请求,并在中断处理程序中执行必要的操作。
为了提高中断处理的效率,可以采用中断嵌套和中断优先级的方式。
嵌入式操作系统_第3章 处理机调度
短作业优先调度算法的特点
算法调度性能较好,
例如上例中,
先来先服务
短作业优先
平均周转时间
2.8
2.45
平均带权周转时间
5.25
3.85
但对长作业不利,未考虑作业的紧迫程度, 运行时间为估计。
调度算法
先来先服务调度算法 短作业(进程)优先调度算法 时间片轮转调度算法 优先权调度算法 最高响应比优先调度算法 多级队列调度算法
抢占方式
抢占方式:又称剥夺方式、可剥夺方式。这 种调度方式是指允许调度程序根据某种原则 去停止正在执行的进程,将已分配给该进程 的处理机重新分配给其他进程。
高级调度主要用于多道批处理系统中,在分 时和实时系统中不设高级调度。
2.中级调度
中级调度又称内存调度,其功能是将内存中 暂时不用的信息移到外存,以腾出空间给内 存中的进程使用,或将需要的信息从外存读 入内存。
引入中程调度的目的是提高内存利用率和系 统吞吐量。
中级调度的运行频率介于两者之间。
事 件 出 现
时间片完 就绪 队列 阻塞队列
进程调度
进程完成 CP U
等待事件
3.2.2 选择调度算法的准则
由于操作系统的类型及目标不同,因此选择 的调度算法也不同。
选择调度算法有以下准则:
面向系统的准则 面向用户的准则
面向用户的准则
周转时间短:指从作业提交到作业完成的时 间间隔。
微机不太重要。
周转时间
作业的周转时间是指从作业提交到作业完 成之间的时间间隔。
平均周转时间是指多个作业的周转时间的 平均值。n个作业的平均周转时间:
T =(T1+T2+ … +Tn)/n(Ti为作业i 的周转时间)
嵌入式实时操作系统(μCOS-II)原理与应用-目录与正文-最新版第一部分

目录学习情境一、嵌入式系统概述及集成环境的搭建与使用 (1)一、知识要点:嵌入式系统概述 (1)1.嵌入式系统基本概念 (1)2.嵌入式系统的特点 (2)3.嵌入式系统的应用领域 (3)(1)工业控制领域 (3)(2)信息家电 (4)(3)交通管理、环境监测、医疗仪器 (4)(4)嵌入式Internet应用 (4)(5)军事国防领域 (5)4.嵌入式系统的发展 (6)5.嵌入式系统的开发流程 (7)6.嵌入式系统的调试 (10)(1)在线仿真器(ICE)方式 (10)(2)在线调试器(ICD)方式 (11)(3)监控器方式 (11)7.基于μCOS-Ⅱ的嵌入式系统软件体系结构 (11)二、技能要求:嵌入式系统交叉开发环境的搭建 (2)1.交叉开发环境 (2)2.使用集成开发环境进行软件开发的流程 (2)3.ARM ADS集成开发工具及其组成 (3)(1)ADS集成开发工具 (3)(2)ADS集成开发工具的组成 (3)案例1.ADS 1.2的安装 (4)案例2.ADS集成开发环境的使用 (5)(1)新建工程 (5)(2)配置新建工程 (6)(3)添加文件,完成编译与链接,并生成目标文件.......... 错误!未定义书签。
案例3.其它工具的使用 .............................................................................. 错误!未定义书签。
(1)仿真器的连接与使用................................ 错误!未定义书签。
(2)超级终端的设置及映像下载.......................... 错误!未定义书签。
(3)Source Insight代码编辑器的使用.................... 错误!未定义书签。
学习情境二、嵌入式平台的接口驱动................................................................... 错误!未定义书签。
基于STM32的嵌入式PLC的设计

基于STM32的嵌入式PLC的设计嵌入式PLC(Programmable Logic Controller)是一种常见的工业自动化设备,用于控制和监测机械和工业过程。
基于STM32的嵌入式PLC设计具有高性能、低功耗和可靠性的特点。
本文将介绍基于STM32的嵌入式PLC的设计原理和关键特性。
一、设计原理嵌入式PLC基于STM32是通过使用STM32系列微控制器实现的。
STM32是意法半导体公司推出的一款32位微控制器,具有高性能、低功耗和丰富的外设接口。
嵌入式PLC利用STM32的高性能处理能力和丰富的外设接口,可以实现高速响应和多种输入输出功能。
设计过程包括以下几个步骤:1.硬件设计:选择合适的STM32微控制器作为主控芯片,设计电路板,包括与外部设备的连接和电源电路的设计。
2.软件开发:使用C语言或者其他高级语言开发PLC控制程序。
该程序控制输入输出设备并响应外部输入信号。
3.调试和测试:将开发好的软件烧录到STM32微控制器中,连接外部输入输出设备进行调试和测试。
二、关键特性1.高性能:STM32微控制器具有高性能处理能力,可以快速响应外部输入信号并实时控制输出设备。
2.多种输入输出接口:STM32系列微控制器具有多个通用输入输出引脚,可以连接各种传感器和执行器。
同时,也可以使用外扩IO板来扩展输入输出接口的数量。
3.丰富的通信接口:基于STM32的嵌入式PLC支持多种通信接口,如UART、SPI、I2C等。
这使得PLC可以与其他外部设备进行通信,实现数据交换和远程控制。
4. 实时操作系统支持:STM32系列微控制器支持实时操作系统(RTOS),如FreeRTOS和uC/OS等。
这些操作系统可以帮助开发人员更好地管理任务和处理中断。
5.低功耗:STM32微控制器具有低功耗特性,可以降低系统的能耗。
这对于一些对能耗要求较高的应用场景非常有利。
6.可靠性:STM32微控制器具有良好的抗干扰能力和稳定性,可以经受恶劣的工作环境和高负载情况。
《嵌入式》课后习题答案
第一章1. 简述嵌入式的定义以应用为中心、以计算机技术为基础,软件硬件可裁剪,适应应用系统对功能、可靠性、成本、体积、功耗严格要求的专用计算机系统。
2. 举例说明嵌入式系统的“嵌入性” 、“专用性” 、“计算机系统”的基本特征。
按照嵌入式系统的定义,嵌入式系统有3个基本特点,即“ 嵌入性”、“ 专用性”与“ 计算机”。
“嵌入性”由早期微型机时代的嵌入式计算机应用而来,专指计算机嵌入到对象体系中,实现对象体系的智能控制。
当嵌入式系统变成一个独立应用产品时,可将嵌入性理解为内部嵌有微处理器或计算机。
“计算机”是对象系统智能化控制的根本保证。
随着单片机向MCU SoC发展,片内计算机外围电路、接口电路、控制单元日益增多,“专用计算机系统”演变成为“内含微处理器”的现代电子系统。
与传统的电子系统相比较,现代电子系统由于内含微处理器,能实现对象系统的计算机智能化控制能力。
“专用性”是指在满足对象控制要求及环境要求下的软硬件裁剪性。
嵌入式系统的软、硬件配置必须依据嵌入对象的要求,设计成专用的嵌入式应用系统。
3. 简述嵌入式系统发展各阶段的特点。
(1)无操作系统阶段:使用简便、价格低廉;(2)简单操作系统阶段:初步具有了一定的兼容性和扩展性,内核精巧且效率高,大大缩短了开发周期,提高了开发效率。
(3)实时操作系统阶段:系统能够运行在各种不同类型的微处理器上,具备了文件和目录管理、设备管理、多任务、网络、图形用户界面Graphic User Interface ,GUI )等功能,并提供了大量的应用程序接口Application Programming Interface ,API ),从而使应用软件的开发变得更加简单。
(4)面向Internet 阶段:进入21 世纪,Internet 技术与信息家电、工业控制技术等的结合日益紧密,嵌入式技术与Internet 技术的结合正在推动着嵌入式系统的飞速发展4. 简述嵌入式系统的发展趋势。
rtx51 tiny原理

rtx51 tiny原理RTX51 Tiny是一款基于RTX51内核的微型嵌入式操作系统。
本文将介绍RTX51 Tiny的原理及其应用。
一、RTX51 Tiny的原理RTX51 Tiny是由Keil公司开发的一款嵌入式实时操作系统。
它的设计目标是在51系列单片机上提供简单、灵活、高效的多任务管理和资源调度功能。
RTX51 Tiny使用了一种基于优先级的抢占式调度算法,能够实现多个任务之间的快速切换,从而提高系统的响应速度和并发处理能力。
RTX51 Tiny的核心是一个可重入的内核,它提供了任务管理、时间管理、资源管理和通信机制等基本功能。
任务管理器负责任务的创建、删除和切换,时间管理器实现了系统时钟的管理和定时器的功能,资源管理器用于管理共享资源的访问,通信机制则提供了任务间的消息传递和事件通知功能。
RTX51 Tiny的任务是用户定义的函数,可以是独立的任务或者中断服务函数。
每个任务都有一个优先级,优先级高的任务会优先执行。
当系统启动时,RTX51 Tiny会自动创建一个空闲任务,它的优先级最低,用于处理系统空闲时的任务。
RTX51 Tiny采用了一种事件驱动的方式进行任务调度。
当一个任务完成了它的工作或者等待某个事件发生时,它会主动让出CPU,将控制权交给调度器。
调度器会从就绪队列中选择优先级最高的任务执行,直到它完成了工作或者时间片用完。
RTX51 Tiny还提供了一些常用的服务函数,如延时函数、信号量函数、邮箱函数等,方便用户进行任务的同步与通信。
用户可以通过这些服务函数来实现任务间的协作和数据交换。
二、RTX51 Tiny的应用RTX51 Tiny广泛应用于各种嵌入式系统中,特别是对实时性要求较高的应用场景。
以下是一些常见的应用领域:1. 工业自动化:RTX51 Tiny可以用于控制系统中的任务调度和数据处理,实现复杂的自动控制算法和实时监控功能。
2. 智能家居:RTX51 Tiny可以用于家庭自动化系统中的任务管理和设备控制,实现智能家居的各种功能,如安防、照明和能源管理等。
嵌入式软PLC技术的研究与实现
嵌入式软PLC技术的研究与实现一、本文概述随着工业自动化的快速发展,可编程逻辑控制器(PLC)作为工业自动化控制系统的核心设备,已经广泛应用于各种工业领域。
然而,传统的PLC设备大多采用专用的硬件平台和软件系统,这限制了其灵活性和可扩展性。
为了克服这些限制,嵌入式软PLC技术应运而生。
本文旨在探讨嵌入式软PLC技术的研究与实现,分析其关键技术、系统架构以及实际应用价值,为工业自动化控制系统的发展提供新的思路和方案。
本文将详细介绍嵌入式软PLC技术的基本概念和特点,阐述其与传统PLC相比的优势和局限性。
然后,通过对嵌入式软PLC技术的关键技术进行深入分析,包括嵌入式操作系统、实时多任务处理、网络通信、编程语言和算法等,揭示其实现原理和技术难点。
接下来,本文将探讨嵌入式软PLC技术的系统架构设计方案,包括硬件平台选择、软件系统设计、功能模块划分等,以及如何实现系统的稳定性、可靠性和实时性。
还将介绍嵌入式软PLC技术的实际应用案例,分析其在实际工业环境中的运行效果和应用前景。
本文将对嵌入式软PLC技术的研究与实现进行总结,展望其未来的发展方向和趋势,为工业自动化控制系统的发展提供有益的参考和借鉴。
通过本文的研究,旨在推动嵌入式软PLC技术的进一步发展和应用,为工业自动化控制系统的升级和改造提供新的思路和方案。
二、嵌入式软PLC技术概述嵌入式软PLC技术,作为一种新兴的工业自动化控制技术,近年来在工业界和学术界都引起了广泛的关注。
它结合了嵌入式系统的特点与可编程逻辑控制器(PLC)的功能,使得传统的硬件PLC的功能可以在软件环境中实现,从而大大提高了系统的灵活性和可定制性。
嵌入式软PLC技术的核心在于将PLC的控制逻辑从专用的硬件平台转移到通用的嵌入式软件平台上。
通过嵌入式操作系统和高级编程语言,用户可以自定义PLC的控制逻辑,实现个性化的控制需求。
嵌入式软PLC技术还充分利用了嵌入式系统的硬件资源,如处理器、内存、I/O接口等,使得PLC的控制功能更加强大和高效。
基于STM32的嵌入式操作系统程序设计及实现本科毕业论文

本科毕业论文(设计)论文题目:基于STM32的嵌入式操作系统程序设计及实现姓名:学号:班级:年级:专业:学院:指导教师:完成时间:作者声明本毕业论文(设计)是在导师的指导下由本人独立撰写完成的,没有剽窃、抄袭、造假等违反道德、学术规范和其他侵权行为。
对本论文(设计)的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。
因本毕业论文(设计)引起的法律结果完全由本人承担。
毕业论文(设计)成果归武昌工学院所有。
特此声明作者专业:电子信息工程作者学号:0930********作者签名:年月日基于STM32的嵌入式操作系统程序设计及实现郝宇The Design and Implementation of embedded operating system program based on STM32Hao, Yu2013年5月20日摘要随着科学技术不断的进步,工业生产越来越先进复杂,操作系统µC/OS-II 是高效、稳定、可靠、节能的系统,广泛应用安防,消费电子中。
而基于Cortex-M3架构下的STM32是一款性价比优越新型微处理器,将µC/OS-II移植到STM32上能够发挥其高效的性能,从而投入社会生产,制造出很多有用又实惠的电子产品,为我们的生活带来便利。
本文主要的研究内容是µC/OS-II操作系统理论分析、移植方法、应用程序设计及调试仿真实现。
首先,对µC/OS-II的理论分析,研究其实际应用及系统结构;其次,分析STM32硬件平台及µC/OS-II的移植需求;最后,在µC/OS-II 上开发LCD,LED,按键KEY等应用程序,并对多任务系统调试分析。
主要研究结论如下:(1)µC/OS-II操作系统主要分为任务管理、内存管理和时间管理三大部分,其间通信是通过消息队列和消邮箱。
(2)µC/OS-II移植主要在OS_CPU.H,OS_CPU_C.C,OS_CPU_A.ASM三个文件中,涉及到数据类型、堆栈、中断定义和任务切换等。
微处理器与嵌入式系统设计
微处理器与嵌入式系统设计电子与电气工程是现代科技领域中不可或缺的重要学科之一。
在当今数字化时代,微处理器与嵌入式系统设计成为电子与电气工程领域中的热门话题。
本文将深入探讨微处理器与嵌入式系统设计的相关概念、应用以及未来发展趋势。
1. 微处理器的基本概念微处理器是一种集成电路芯片,内部包含了中央处理器(CPU)、内存控制器、输入输出控制器等核心组件。
它是计算机系统的大脑,负责处理和执行各种指令,实现数据的运算和处理。
微处理器的性能和功能直接影响到计算机的运行速度和效率。
2. 嵌入式系统的定义与特点嵌入式系统是指将计算机技术和电子技术应用于各种电子设备中,使其具备智能化、自动化和网络化等特点的系统。
与通用计算机不同,嵌入式系统通常具有体积小、功耗低、功能专一等特点。
它广泛应用于汽车电子、智能家居、医疗设备、工业控制等领域。
3. 微处理器在嵌入式系统中的应用微处理器在嵌入式系统中起到了至关重要的作用。
它可以实现对各种外设的控制和管理,同时还能处理各种数据和信号。
例如,在智能手机中,微处理器负责控制屏幕显示、摄像头拍摄、无线通信等功能;在工业自动化系统中,微处理器可以实现对生产线的自动控制和监测。
4. 嵌入式系统设计的挑战与解决方案嵌入式系统设计面临着多种挑战,如资源受限、功耗管理、实时性要求等。
为了解决这些问题,设计工程师需要充分考虑硬件和软件的结合,采用优化的算法和技术。
例如,通过对系统进行功耗优化、任务调度优化和资源分配优化,可以提高系统的效率和性能。
5. 微处理器与嵌入式系统的未来发展趋势随着物联网和人工智能等领域的快速发展,微处理器与嵌入式系统的应用范围将进一步扩大。
未来的微处理器将更加强大和高效,能够处理更复杂的任务和数据。
嵌入式系统将更加智能化和自动化,能够与其他设备进行无缝连接和通信。
综上所述,微处理器与嵌入式系统设计是电子与电气工程领域中的重要研究方向。
通过深入研究微处理器的基本概念和嵌入式系统的特点,我们可以更好地理解它们在现代科技中的应用和意义。
一种嵌入式领域容器集群调度器架构设计
一种嵌入式领域容器集群调度器架构设计
吴晗;吴姣;宋奇衡
【期刊名称】《电脑编程技巧与维护》
【年(卷),期】2024()5
【摘要】随着云计算、大数据和人工智能技术的快速发展,现有航空装备逐步向这些技术靠拢,容器虚拟化技术具有轻量化、跨平台、可移植、简单易用等特点,思路十分契合航空机载软件的特点和发展需要,“容器上飞机”成为未来航空机载领域的潮流和趋势。
本文以机载容器云平台为背景,开展了机载环境下容器调度器的设计,设计了一种共享资源状态的调度器架构,包含通信支持模块、资源映射模块、调度模块三类模块,通过模块之间的互相协作,共同完成调度任务。
【总页数】4页(P54-56)
【作者】吴晗;吴姣;宋奇衡
【作者单位】航空工业西安航空计算技术研究所
【正文语种】中文
【中图分类】TP3
【相关文献】
1.一种嵌入式微调度器的实现方法
2.一种Web服务器集群负载均衡调度算法
3.一种共享存储视频服务器集群的请求调度策略
4.一种针对嵌入式处理器的动态调度控制器设计
5.一种多集群容器云资源调度优化方法
因版权原因,仅展示原文概要,查看原文内容请购买。
TinyOS中多优先级任务队列调度策略研究
1引言无线传感器网络[1]是由部署在监测区域内的大量廉价微型传感器节点组成,通过无线通信的方式形成一种多跳的网络系统,能够通过协作实时监测、感知、和采集网络分布区域内的各种环境或监测对象的信息,并对这些信息进行处理,从而获取更详尽而准确的信息。
无线传感器网络操作系统(Wireless Sensor Network Operating System,WSNOS)是无线传感器网络节点的基本软件环境,是众多无线传感器网络应用开发的基础,它的灵活性、高效性和实时性将直接影响到整个网络的性能[2]。
根据无线传感器网络节点操作系统的调度系统,调度策略可分为两类,事件驱动单线程系统和多线程系统。
作为事件驱动类型操作系统的代表,加州大学伯克利分校开发的TinyOS[3]是一个为网络嵌入式系统定制的一个操作系统,TinyOS操作系统采用最基本的FCFS[4](First Come First Service)调度策略;多线程系统则以MAN-TIS OS[5]为代表,MANTIS OS采用的是一种类UNIX 的调度系统,它提供基于优先级的多线程调度和在同一优先级中时间片轮转调度,两类系统各有优劣。
随着无线传感器应用领域的不断拓展,任务的数量和执行时间明显增加,任务的实时性要求也大大增加,尤其是紧急情况下系统对网络任务的响应。
在实时环境中,实时性不足是TinyOS调度策略的一个重要缺陷,文献[6]提出了基于最早截至时限优先的调度策略TinyOS中多优先级任务队列调度策略研究马文涛,李双庆MA Wentao,LI Shuangqing重庆大学计算机学院,重庆400044College of Computer Science,Chongqing University,Chongqing400044,ChinaMA Wentao,LI Shuangqing.Research on multi-level priority task queue scheduling strategy in puter Engineering and Applications,2014,50(22):106-110.Abstract:Considering the deficiency that TinyOS FCFS scheduling strategy cannot timely response to important tasks,a scheduling strategy based on multi-level priority task queue is proposed and implemented on TinyOS.Multi-level priority task queue scheduling strategy expands original task queue from one to three priority queues and preemption mechanism is introduced,a task in the highest priority queue can preempt the task running in other queues only when it satisfies preemp-tive principles,task preemption only takes place between different queues,In this way the time of context switching decreases and important tasks can execute in time.Experiment results prove that this new scheduling strategy improves the response characteristic for important tasks of TinyOS efficiently without affecting the intrinsic performance of TinyOS. Key words:wireless sensor network;TinyOS;scheduling strategy摘要:针对TinyOS先来先服务调度策略中重要任务不能及时响应的不足,提出一种基于多优先级任务队列的调度策略。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
用 中需 要 使 用 大 量 的传 感 器 、 行 器 和 控 制 器 等 , 其 数 执 对
据 显 示 和 传 输 控 制 需 要 通 过 不 同优 先 级 的任 务 来 控 制 。 ③ 低 消 耗 要 求 。 随 着 应 用 环 境 的 复 杂 化 , 智 能 仪 对
的 、 能确 定 的 多 个 任 务 。 每 个 任 务 一 般 处 于 3种 状 态 : 功 执行 状 态 、 绪 状 态 和 等 待 状 态 ( 的 操 作 系 统 还 具 有 挂 就 有 起 和休 眠状 态 ) 。为 了 满 足 实 时 性 要 求 , 统 根 据 一 定 的 系
② 动 态 算 法 :在 系 统 初 始 化 时 初 步 分 配 一 个 优 先
3 嵌 入 式 微 调 度 器 的设 计 与 实现
根 据 智 能 仪 表 对 调 度 算 法 实 时 性 、 任 务 、 消 耗 的 多 低
级 。每 一 个 任 务 在 运 行 时 可 以 改 变 它 的优 先 级 。 当前 的嵌 入 式 操 作 系 统 一 般 采 用 静 态 算 法 , 在处 理 只
此 外 , 要 求 调 度 器 必 须 有 精 确 定 时 的 功 能 , 就 是 还 也
事件 驱 动 和 时 钟 驱 动 相 Nhomakorabea 合 , 满 足 智 能 仪 表 中周 期 性 任 以 务 执行 和 突 发 性 任 务 执 行 的需 要 。
优 先 级 保 持 不 变 。 当一 个 事 件 发 生 时 , 度 程 序 只 需 要 查 调 就绪表 , 可以调度哪个任务处于运行状态 。 就
要 求 , 文 提 出 了 一 种 新 的静 态 优 先 级 , 任 务 队列 、 有 本 单 具
4种 任 务状 态 的 非 抢 占式 调 度 的 轻 量 级 任 务 调 度 算 法 , 并 根 据 这 种 算 法 实 现 了应 用 于 智 能 仪 表 的 调 度 器 。该 算 法 的特 点 是 以任 务 在 任 务 控 制 块 数 组 中 的 相 对 位 置 表 示 优 先 级 高 低 , 务 的状 态 和 延 时 量 使 用 统 一 的 任 务 状 态 字 , 任
型 的 8位 、 6位 S C上 进 行 设 计 , 1 o 实现 了基 于 这 种 算 法 的 嵌 入 式操 作 系统 。
关键词
微 调 度 器 仪 器仪 表
调 度 算 法
智 能 仪 表 是 自动 控 制 技 术 的 重 要 组 成 部 分 。 随 着 智
优 先 级 反 转 时 临 时采 用 动 态 优 先 级 算 法 。
原 则 选择 合 适 的任 务 执行 。 常见 的 任务 调 度算 法 分 为 静 态 算 法 和 动 态 算 法 两 类 : ① 静 态 算 法 :在 系 统 在 运 行 前 ( 即系 统 初 始 化 阶段 ) , 就 为 所 有 的任 务 分 配 固定 的优 先 级 别 , 系统 执 行 过 程 中 在
表 的计 算 能 力 要 求越 来 越 高 , 必 要 求 调 度 器 必 须 占 用 较 势
少 的系 统 资 源 。 ④ 低 成 本 要 求 。为 了 降 低 成 本 , 硬 件 设 计 上 , 储 在 存 器 的大 小 是 成 本 控 制 的 一 个 方 面 。因 此 , 求 提 供 的调 度 要 器 必 须 具 备 小 内核 以减 小 存 储 空 间 。
操 作 系统 的特 殊 要 求 设 计 了 一 种 新 的任 务 调 度 算 法 , 实 并
现 了 一 个应 用 于 中 低 端 仪 器 仪 表 的 嵌 入 式 微 调 度 器 。
1 实 时任 务 调 度 的 一 般 方 法 和 策 略
在 实 时 操 作 系 统 中 , 统 把 应 用 分 为 行 为 可 以 预 知 系
能 仪 表 在 工 业 控 制 、 信 和 汽 车 电 子 中 的 广 泛 应 用 , 能 通 智
仪表逐渐向数字化 、 网络 化 、 能 化 方 向 发 展 ; 时 , 能 智 同 智
2 仪 器 仪 表 对 调 度 算 法 的要 求
为 了 提 高 仪 表 的可 靠 性 , 现 高性 能 、 功 能 应 用 , 实 多 应
维普资讯
一
种 嵌 入式 微 调度 矗 的实现 方 法 *
■ 重 庆 邮 电大 学 曾 素 华 蒋 建 春
常 用 的嵌 入 式操 作 系统 不 能 很 好 地 满足 中低 端 仪 器 仪 表 小 内核 、 实 时性 、 可 靠 性 的 要 求 。 本 文 通 过 高 高 摘 要 分 析 常 见 嵌 入 式操 作 系统 的 任 务 调 度 算 法 , 出一 种 新 的应 用 于 智 能 仪 表 的 实 时任 务 调 度 算 法 , 提 并在 典
* ① 国家 高 技 术 研 究 发 展 计 划 ( 6 8 3计 划 ) 2 0 AAI A1 (06 1 C1—3 汽 车 , 节 气 门控 制 软 件 及 电控 系 统 支 撑 技 术 开 发 ) ; ② 国家 高 技 术 研 究 发 展 计 划 ( 6 8 3计 划 ) 2 0 AAl A1 7—2 长 安 (06 l 0 ,
用 于智 能 仪 表 的 调 度 器 必 须 满 足 以 下 要 求 : ① 良好 的实 时 性 。智 能 仪 表 必 须 实 时 地 对 通 过 现 场 总 线 采 集 的数 据 进 行 数 字 编 码 , 过 人 机 界 面 进 行 显 示 , 通 并 把 用 户 对 被 监 控 系 统 的 参 数 设 置 实 时 地 传 送 给 执 行 部件 。 ② 基 于 优 先 级 的任 务 调 度 策 略 。在 复 杂 的大 规 模 应
仪表 复 杂度 不 断增 加 , 实 时 性 要 求 几 乎 达 到 了 苛 刻 的程 对 度 。在 编程 方 式 和 代 码 重 复 利 用 等 方 面 , 循 环 方 式 的智 超 能仪 表越 来 越 不 能 满 足 资 源 管 理 和 系统 的实 时要 求 , 切 迫
需要 在 中低 端智 能 仪 表 中 加 入 一 些 轻 量 级 的 多 任 务 管 理 的 调 度器 或 实 时操 作 系 统 。本 文 根 据 智 能 仪 表 对 嵌 入 式