最小二乘方差分量估计在GNSS差分定位随机模型精化中的应用
基于最小二乘法的GNSS伪距测量定位
导航解的线性化误差, 从而大幅度提高了定位精度, 使定位精度误差可达到分米级,满足实际需求。
1
1.1
GNSS 伪距测量定位
伪距 测距定位是通过测量目标点到已知位置点上目
标距离来确定目标位置的定位方法,使用 3 个信号 表示三边距离,使用多个信号表示多边距离 [10]。在 利用导航卫星进行测距定位时,通常使用接收机时 钟来测量信号的达到时间,使用发射机时钟来测量 信号的传输时间,而在实际中,这 2 个时钟是不同
阶段工作,届时将提供全球范围内的 GNSS 服务 [5]。 GNSS 提供的基本定位精度可达米级,同时采 用差分技术可以利用已知的基站来矫正导航误差, 将定位精度进一步提高 [6] 。然而, GNSS 所具有的 是相对基本的定位模式,载波相位技术对干扰、信 号中断和卫星几何分布更加敏感,因此如何减少定 位精度误差,提高导航精度成为近年来各国广泛研 究的重点问题 [7] 。笔者提出了一种基于最小二乘法 该模型有效减小了 的 GNSS 伪距测量定位模型 [8 9],
0
引言
全 球 导 航 卫 星 系 统 ( global navigation satellite system , GNSS)是一类导航系统的总称。这些导航 系统使用在轨卫星发射无线电信号,进行被动测距 定位。 GNSS 是一个自身定位系统,即在导航设备 中来计算定位解,计算出的定位位置结果不需要发 射任何信号 [1]。 20 世纪 60 年代,美国建立了世界上第一个卫 星导航系统——子午仪卫星导航系统,主要应用于 船舶导航,并一直运行到 1996 年。接着俄罗斯也建 立了类似的系统——圣卡达卫星导航系统。 1978 年, 美国的全球定位系统( GPS)第一颗运行工作的卫星 发射成功,于 1993 年向世界公布了整个 GPS 系统 的初始运行能力。同时,俄罗斯的全球导航卫星系 统( GLONASS)也研发成功。欧洲的全球导航卫星 系统——伽利略( Galileo),由欧盟的主要国家合作 研发,并计划于 2016 年完成初始运行能力 [2 4]。此 外,我国的“北斗”卫星导航系统已于 2012 年完成 一、二阶段的运行,可对我国及周边国家区域提供 局域的 GNSS 导航服务,计划到 2020 年完成第三
基于递推最小二乘平方差的GPS精密单点定位精度研究

两个接收机组成双差观测值 , 以消除这两个接收机
之 间的公 共误差 而提 高定 位 精 度 。所 以 , 作业 时 在
领域 。
在 GS P 精密单点定位 的研究 中, 如何提高其定 位精度 , 并解决定位 的实时性一直是该领域 的研究
重点。
为 了消除或 削 弱这 些 误 差 的影 响 , 曾经 普遍 采 用 了差 分 G S P 。差 分 G S使 用 用 户 站 和 基 准 站 上 P
1 精密单点定位数学模型
必须 有一 个接 收机 处 于基 准 站 上 , 且用 户 站 的接 收
个载波上的伪距观测值 P 、 P 和相位观测值 、
L 将 这 四个 观 测 值 按 式 ( ) 式 ( ) 行 线 性 组 , 1和 2进 合, 可得组 合方程 为 :
f 2 f2
机 不能 离基 准 站 的接 收机 太 远 , 则 , 位 精 度 将 否 定 显 著下 降 。这 既造 成差 分 G S成本 上 的提 高 , 限 P 也
数学模 型。建立 了递推最小二乘平差进 行参数估 算的数 学模 型, 并利用该方 法进行相 位平滑 伪距处理 。分析 了该方 法对伪
距观测误 差的影响。利用 bree ens 软件和据此编制 的程序 , 并利用 IS跟踪站 的观测数据进行 了接 收机 三维 坐标 的解算。将 G I S观测值坐标 作为真值 , G 解算值和真值之间的偏差作 为定位误差 。仿真结果表 明, 经过递推最小二乘 伪距平滑处理后 , 密 精
03-解放军信息工程大学2013年博士研究生招生专业目录及考试范围

1)编译引论5%;2)形式语言与自动机理论基础20%;3)词法分析 10%;4)语法分析35%;5)语义分析与中间代码生成15%;6)运行环境5%;6)代码优化10%。
方向02必选③④
02 空间大地测量与导航
许其凤
魏子卿
郑勇
郝金明
孙付平
韩春好
周建华
于志坚
张传定
郗晓宁
03 物理大地测量
吴晓平
夏哲仁
张传定
孙中苗
04 测量数据处理与信息系统
杨元喜
吕志平
隋立芬
柴洪洲
归庆明
05 精密工程测量
李广云
06 海洋大地测量
翟国君
黄谟涛
081602 摄影测量与遥感
可招收地方无军籍博士研究生
2011
数字化战场基础建设
数字化战场测绘保障基本概念和主要任务20%,地理空间基础框架基本概念和主要研究内容 20%,战场环境概念和主要内容20%,战场环境仿真基本概念和原理20%,数字化战场信息安全的含义和主要内容20%。
2012
代数学(一)
1) 模论25%;2) 交换代数初步35%;3)域论(含有限域理论)40%。
摄影测量原理
摄影测量遥感器15%;摄影测量解析定位理论与方法40%;数字摄影测量技术35%,摄影测量新理论、新技术与新方法10%。
2010
数字地图制图学原理
地图、地图学、数字地图制图学15%,地图数学基础及变换10%,地图资料、数字地图数据获取与处理 20%,地图内容制图综合10%,普通地图和专题地图的表示10%,地图数据符号化与出版处理 15%,数字地图制图生产流程10%,电子地图制作和应用10%。
卫星导航系统
基于整体最小二乘的GNSS高程拟合研究

基于整体最小二乘的GNSS高程拟合研究杨会军【摘要】T he overall least squares adjustment is more comprehensive for the error fac‐tors of the known data .All observed data had been done by adjustment processing The method is suitable .The GNSS height fitting based on surface function fitting and multi sur‐face function fitting is optimized ,and this method was testified by level measurement project in a certain hydropower station .The results show that the accuracy of the two fitting meth‐ods is obviously improved .%整体最小二乘平差更加全面的考虑了已知数据的误差因素,对所有观测量统一进行平差处理,方法更加严密。
基于该方法对曲面函数拟合和多面函数拟合GNSS高程进行优化,并用某水电站水准测量工程进行验证,结果表明:两种拟合方法精度都有明显提高。
【期刊名称】《全球定位系统》【年(卷),期】2015(000)006【总页数】3页(P99-101)【关键词】GNSS;高程拟合;整体最小二乘;多面函数【作者】杨会军【作者单位】小浪底水利水电工程有限公司,济源454681【正文语种】中文【中图分类】P228.4GNSS技术作为一种高精度、全自动、全天候的现代测绘技术,已经应用于测绘、海洋、工程、交通等多个领域。
但是目前应用的GNNS数据大多是平面位置数据,GNSS高程数据一直未被广泛应用,其原因主要是:GNSS高程为大地高,是基于几何意义的高程系统,而通常意义上的高程系统是基于物理原理的正高系统或正常高系统,与大地高高程系统差别较大,且大地水准面或似大地水准面不与椭球面平行,因此两者难以结合;GNSS高程的精度低于平面位置精度,通常难以满足水准测量的精度要求[1]。
两种多天线GNSS定姿方法的精度分析

两种多天线GNSS定姿方法的精度分析张方照;柴艳菊;柴华;丁磊香【摘要】基于高精度多天线GNSS基线分量及精度估计结果,实现了两种常用的多天线定姿方法:直接姿态法和最小二乘姿态法.利用一套车载三天线GNSS实测数据和高精度惯性导航系统(陀螺漂移0.005(°)/h,加速度计零偏优于10-3g)输出的姿态结果,深入分析了两种定姿方法的内、外符合精度.实验结果表明:两种定姿所解算的航向角、俯仰角和横滚角的精度分别为:直接法的内符合精度约为0.3°~0.5°、0.3°~1.0°、0.5°~1.0°,最小二乘法约为0.1 °、0.2°~0.5°、0.5°~2.0°,即最小二乘法对航向角估计有明显改善,对俯仰角和横滚角改善不明显;两种方法的姿态外符合精度(消除航向系统偏差)基本一致,约为0.08°、0.15°、0.42°,但是最小二乘法得到的航向角系统偏差更小.【期刊名称】《中国惯性技术学报》【年(卷),期】2016(024)001【总页数】6页(P30-35)【关键词】GNSS多天线测姿;直接姿态法;最小二乘姿态法;姿态精度【作者】张方照;柴艳菊;柴华;丁磊香【作者单位】中国科学院测量与地球物理研究所大地测量与地球动力学国家重点实验室,武汉 430077;中国科学院大学,北京 100049;中国科学院测量与地球物理研究所大地测量与地球动力学国家重点实验室,武汉 430077;中国科学院测量与地球物理研究所大地测量与地球动力学国家重点实验室,武汉 430077;中国科学院测量与地球物理研究所大地测量与地球动力学国家重点实验室,武汉 430077;中国科学院大学,北京 100049【正文语种】中文【中图分类】P228运动载体的姿态信息在军事和民用领域显得日益重要,已成为航空、航天等的重要导航信息[1]。
基于加权最小二乘的GNSS高程拟合模型分析
基于加权最小二乘的GNSS高程拟合模型分析朱宝训;杨波;王晓静;高宁【摘要】Generally, the GNSS height fitting is based on the classic Gauss-Markov model, in which the least square solution is not optimal because the influential factors of each observed value are ignored. The paper puts forward a direct weighing deter-mining method on the basis of quadric surface fitting model by discussing the differences among several types of weighted least squares models, so as to obtain the optimal solution. The direct weighing method is compared with iteration method with variable weights and the recursive weighted least squares method by experiments, and the results show that there is little difference in the accuracy of above three methods, the direct weighing determining method is simple and practical for practical applications.%GNSS高程拟合多建立在经典Gauss-Markov 模型的基础上,没有考虑各观测值的影响因子,最小二乘解不是最优。
改进最小二乘算法在天文定位中的应用
坐标系之间的映射关系针对最小二乘算法只考虑了观测量中的误差没有顾及系数矩阵中的误差和数据中可
能存在的粗大误差问题为了提高数字天顶仪进行天文定位时的解算精度将最小二乘算法与总体最小二乘算法
进行有效结合构成了混合最小二乘算法该算法能够同时顾及坐标转换中系数矩阵和观测量中的误差为了消
除识别恒星数据中可能存在的粗大误差对天文解算的影响对所提算法进行了稳健加权并结合星等设置合理的
MJI(T e;3-734+'HRJ >573-5)'$ 'LMI(TLB5&5+
!!"U(7%&%O%+'0 A&77&)+@(4&(++/&(4'1'6F+%S'/6+9(&:+/7&%,'0@(4&(++/&(4'8&*$(;!<<?d'=>&($# ?"9(&%hVh<!'0%>+5-M 'Z+&I&(4!<<<f<'=>&($"
! !.91*$)&*%R/5.3090..76-/%;.0/B0&07./.Q;7607&4%65/B1/%0./7V&5.B/B017CC53460&7/5%3.B5CV0/@003/B0 9B7640<9%;C&0880N590!]]Y"517409%%68537/0.-./01738/B090&0./57&/73403/C&7309%%68537/0.-./01 @B03 ;.534/B08545/7&Z035/B971067P%67./6%3%1597&C%.5/5%3534'EB0&07./.Q;760.7&4%65/B1 %3&-9%3.5806./B0 066%6.53/B0%V.06N7/5%3'V;/8%0.3%/9%3.5806/B0066%6.53/B09%0PP59503/17/65W738/B0C%..5V&046%..066%6. 53/B087/7'R3%6806/%51C6%N0/B0799;679-%P/B08545/7&Z035/B971067537./6%3%1597&C%.5/5%3534'/B0&07./ .Q;760.7&4%65/B1738/B0/%/7&&07./.Q;760.7&4%65/B1 7600PP09/5N0&-9%1V5308/%P%61 7 15W08&07./.Q;760. 7&4%65/B1'@B59B973/7D053/%799%;3//B0066%6.%P/B09%0PP59503/ 17/65W738 %V.06N7/5%353 9%%68537/0 /673.P%617/5%3'R3%6806/%0&51537/0/B053P&;0390%P/B0C%..5V&046%..066%6.53./76609%435/5%3 87/7%3 7./6%3%1597&.%&;/5%3'/B0C6%C%.087&4%65/B15. @054B/086%V;./&-'7387607.%37V&0 @054B/ 17/65W5..0/ 9%1V5308@5/B 17435/;80'EB060.;&/.%P87/7737&-.5..B%@/B7//B06%V;./ @054B/08 15W08&07./.Q;760. 7&4%65/B1B7.B54B799;679-537./6%3%1597&.%&;/5%3'
rtklib伪距单点定位最小二乘法

RTKLIB是一种用于实时定位和测量的开源软件,它支持全球导航卫星系统(GNSS),包括GPS、GLONASS、Galileo和北斗。
在RTKLIB 中,伪距单点定位是一种常用的定位方法,它通过测量接收机和卫星之间的伪距距离来实现定位。
在伪距单点定位中,最小二乘法是一种常用的数学模型,它通过最小化测量值与估计值之间的误差平方和,来估计未知参数。
在RTKLIB中,最小二乘法被广泛应用于伪距单点定位中,通过对接收机和卫星之间的伪距距离进行最小二乘估计,来实现定位。
伪距单点定位最小二乘法的算法主要包括以下步骤:1. 数据采集:需要在接收机上采集卫星信号的伪距数据。
2. 估计参数:利用最小二乘法对接收机位置和钟差等参数进行估计。
3. 残差计算:计算估计值与测量值之间的残差,即观测值与估计值之间的差值。
4. 参数调整:根据残差的大小,调整参数的估计值,使残差最小化。
5. 定位结果:通过调整后的参数估计值,得到接收机的定位结果。
伪距单点定位最小二乘法在实际应用中具有一定的优势和局限性。
优势在于算法简单易懂,计算速度较快,适用于单点定位的室外环境。
然而,由于伪距单点定位依赖于接收机与卫星之间的伪距距离,容易受到环境遮挡、多径效应等因素的影响,精度较低,定位误差较大。
在实际应用中,为了提高伪距单点定位最小二乘法的精度和稳定性,可以结合多频观测、多站观测、差分定位等技术,以及对环境遮挡的优化和多径效应的抑制,来改善定位精度。
另外,还可以考虑使用RTK(实时运动定位)技术,通过基站进行差分改正,进一步提高定位精度和可靠性。
伪距单点定位最小二乘法作为RTKLIB定位的一种常用方法,在实际应用中需要结合多种技术和方法,以提高定位精度和可靠性。
通过不断的优化和改进,可以更好地适应各种复杂的定位环接下来,让我们深入探讨一下伪距单点定位最小二乘法在RTKLIB中的具体应用。
我们来详细了解一下伪距单点定位的原理和基本步骤。
1. 伪距单点定位原理伪距单点定位是一种基于GNSS测量解算的定位方法,它通过测量接收机和卫星之间的伪距距离来确定接收机的位置。
改进的最小二乘模型在GPS天线相位中心检测中的应用
利用旋转天线法检测接收机相位中心偏差 的方法主要有最小二乘法与平面何法。最小
[收稿日期# 2019 —02—12 [作者简介#闫洪超(1974 —),男,河南新乡人,大学专科,高级工程师,从事地质测绘与水工环地质工作)
E-mail: 494517004@qq. com
954
差大小为#X,#Y,则旋转后的坐标为:
- 」" _ -)j
-cosA -sinAn r)jr1 -
=
y, _sinA cosA y/-1
其中,0)代表旋转后的天线相位中心偏
差在北方向和东方向的大小,(2,3,・・・,N),j =
(1,2) =%)1,21 =%y1 ,)2] =%r2 ?y21 =%y2)
少 pl4(&14, 14)
Txi
1(^11,^11)
少 卜 pl3(&13, 13
pn{8xn,Sy\2)
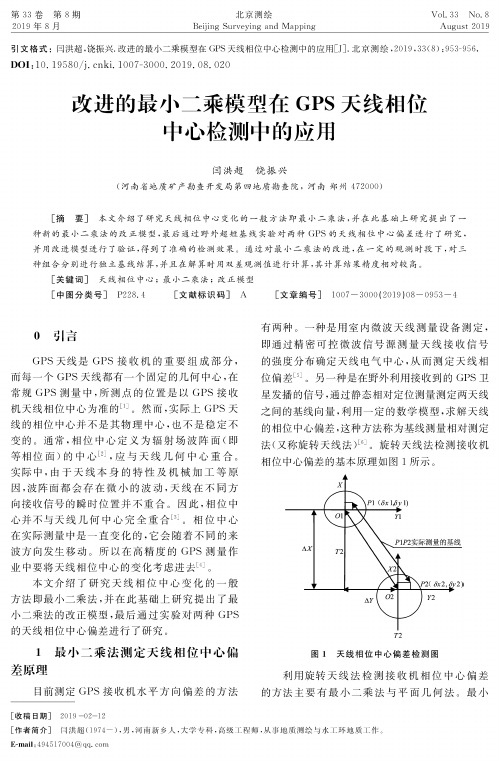
图3 天线旋转示意图
假设天线每次旋转的角度是A,那么天线旋 转的次数就是N =360/A ,且满足N为整数且不 小于3。两个天线的相位中心偏差分别为P1
(加1 ,丹1),P2 (加2 ,旳2),两天线的几何中心偏
改进的最小二乘模型在GPS天线相位 中心检测中的应用
闫洪超饶振兴 (河南省地质矿产勘查开发局第四地质勘查院,河南 郑州472000)
[摘 要# 本文介绍了研究天线相位中心变化的一般方法即最小二乘法,并在此基础上研究提出了 一
种新的最小二乘法的改正模型,最后通过野外超短基线实验对两种GPS的天线相位中心偏差进行了研究,
2. 1误差方程
V = BX-L
(3)
式中:X = (%)1, %y1, %x2 , %y2 , #X, #Y) T ,为
最小二乘估计
最小二乘估计随着空间技术的发展,人类的活动开始进入了太空,对航天器(包括人造地球卫星、宇宙飞船、空间站和空间探测器等)的观测手段和轨道确定提出了很高的精度要求。
在计算技术高速发展的推动下,各种估计理论也因此引入到轨道估计方法中。
大约在1795年高斯在他那著名的星体运动轨道预报研究工作中提出了最小二乘法。
最小二乘法就成了估计理论的奠基石。
最小二乘估计不涉及观测数据的分布特性,它的原理不复杂,数学模型和计算方法也比较简单,编制程序不难,所以它颇受人们的重视,应用相当广泛。
对于严格的正态分布数据,最小二乘估值具有最优一致无偏且方差最小的特性。
实践证明,在没有粗差的情况下,大部分测量数据基本上符合正态分布。
这是最小二乘估计至今仍作为估计理论核心的基础。
最早的轨道确定就是利用最小二乘法,用全部观测数据确定某一历元时刻的轨道状态的“最佳”估值,即所谓的批处理算法定轨。
长期以来,在整个天体力学领域之中,各种天体的定轨问题,几乎都是采用这一方法。
卫星精密定轨的基本原理为:利用含有误差的观测资料和不精确的数学模型,通过建立观测量与卫星状态之间的数学关系,参数估计得到卫星状态及有关参数的最佳估值。
参数估计的基本问题就是对一个微分方程并不精确知道的动力学过程,用不精确的初始状态X0和带有误差的观测资料,求解其在某种意义下得卫星运动状态的“最佳”估值X。
常用的参数估计方法有两种,最小二乘法和卡尔曼滤波方法。
最小二乘法是在得到所有的观测数据之后,利用这些数据来估计初始时刻状态量的值,由于用到的观测数据多、计算方法具有统计特性,因此该方法精度高。
卡尔曼滤波在观测数据更新后,利用新的观测数据对状态量进行改进得到这一观测时刻的状态量,卡尔曼滤波适用于实时处理。
卫星精密定轨输运高精度的事后数据处理,通常采用最小二乘法进行参数估计。
记观测量的权阵为P。
利用加权最小二乘法计算总的观测方程方程y二Hx0•;,得x =(H T PH)JH T py卫星的参考状态为X; = X0 x0在精密定轨的过程中,由于状态方程和观测方程在线性化过程中会产生误差,上式的解算需要通过不断的迭代。
总体最小二乘平差理论及其在测绘数据处理中的应用
总体最小二乘平差理论及其在测绘数据处理中的应用总体最小二乘平差理论及其在测绘数据处理中的应用随着科学技术的进步和社会经济的发展,测绘数据处理在日常工作中的应用越来越广泛。
而其中的总体最小二乘平差理论作为一种经验性的统计学方法,在测绘数据处理中也得到了广泛的应用。
本文将对总体最小二乘平差理论进行介绍,并探讨其在测绘数据处理中的应用。
总体最小二乘平差是用于测量过程中误差的估计和调整的一种方法。
总体是指样本所属的整体,而最小二乘平差则是通过最小化测量误差的平方和来估计参数值,以达到精确测量的目的。
总体最小二乘平差理论可以用公式表示为:(A^T P^(-1) A) x = A^T P^(-1) l其中,A是系数矩阵,x是待求参数,P是协方差矩阵,l是观测值向量。
通过解上述方程组,可以得到最小二乘平差的结果。
总体最小二乘平差理论的应用在测绘数据处理中非常重要。
首先,它能够对测量数据进行合理的处理,形成精确的测绘结果。
在大规模工程测量中,测量数据的准确性和一致性是至关重要的,而使用总体最小二乘平差方法可以有效地减小误差,提高数据的精确度。
其次,总体最小二乘平差理论可以在测量数据中发现和处理异常值。
在实际测量中,可能会存在数据中的异常点,这些异常点可能是测量仪器的误差或者人为干扰所导致的。
通过应用总体最小二乘平差理论,可以通过较小的测量精度对异常点进行检测,并从计算中进行排除,确保最终的测量结果准确无误。
此外,总体最小二乘平差理论还可以进行各类测量数据的组合。
在实际的测绘工作中,通常需要对不同类型的测量数据进行综合分析,以得出最终的测绘结果。
总体最小二乘平差方法可以方便地将不同类型的测量数据组合起来,进行统一的平差计算,从而得到更加准确的结果。
总体最小二乘平差理论在测绘数据处理中的应用经过了长期的实践和发展,并取得了显著的成果。
其应用不仅能够提高实际测量的准确性和一致性,还能够发现和处理异常值,实现不同类型测量数据的组合。
最小二乘及其扩展方法在测绘中的应用

1、高维数据降维:通过降维技 术将高维数据转化为低维数据, 分析:对于按时间 顺序排列的数据
示例:在遥感影像处理中,可以利用主成分分析(PCA)将高维的遥感影像数 据降维到低维,再使用最小二乘法进行地面控制点的拟合。另外,在地理信息 系统(GIS)中,可以利用时间序列分析对地理位置和时间之间的相关性进行 研究,为城市规划、交通流量预测等提供依据。
1、多元偏最小二乘回归(MPLSR)
MPLSR在PLSR的基础上引入了额外的结构,以处理多因变量的问题。它通过同 时考虑多个因变量,构建一个统一的模型来揭示它们与预测变量之间的关系。
2、结构型偏最小二乘回归 (SPPLSR)
SPPLSR进一步扩展了PLSR,它假设预测变量和因变量之间存在某种未知的结 构关系。通过正则化方法,SPPLSR可以找到更稳健的模型,降低过拟合的风 险。
四、结论
偏最小二乘回归是一种强大的统计工具,但其基本模型在处理复杂数据时可能 会遇到挑战。通过引入扩展模型如MPLSR和SPPLSR,我们可以处理更复杂的数 据结构并提高模型的预测能力。在实际应用中,我们需要构建相应的算法来优 化这些模型,并使用适当的评估指标来验证模型的性能。这将为我们提供一个 强大的工具来处理复杂的数据问题并揭示隐藏在数据中的重要模式。
在测绘数据处理中,总体最小二乘平差理论的应用主要包括以下步骤:
1、建立数学模型:根据实际情况建立合适的数学模型,如线性回归模型、二 次曲线模型等。
2、计算残差:根据观测数据和预测数据计算残差。 3、计算权重:根据残差的大小计算每个观测数据的权重。
4、最小二乘平差:利用权重对观测数据进行加权最小二乘拟合,得到最佳参 数估计。
基本方法
最小二乘法的基本原理是将数据点拟合到一条直线上,使得所有数据点到直线 的垂直距离的平方和最小。通常,最小二乘法用于拟合一次直线或二次曲线, 以最小化残差平方和。其步骤包括:
最小二乘平差原理csdn
最小二乘平差原理csdn
最小二乘平差原理是一种常用于数据处理和参数估计的方法。
它
是通过最小化观测值与预测值之间的差异的平方和来求解未知参数的
最优值。
最小二乘平差原理的基本思想是,通过建立一个数学模型来描述
观测量与待估参数之间的关系,然后使用观测数据进行模型参数的估计。
在建模过程中,通常会假设观测误差满足一定的概率分布,常见
的是假设观测误差服从正态分布。
根据这些假设,可以通过最小化观
测值与模型预测值之间的差异的平方和来求解最优的参数估计。
最小二乘平差原理在测量和定位领域有着广泛的应用。
例如,在
测量大地水准面时,可以通过观测水准仪的高程差来求解待估的地理
坐标,而最小二乘平差原理可以帮助我们优化地求解参数估计。
在全
球导航卫星系统(GNSS)定位中,最小二乘平差原理可以帮助我们估
计接收机钟差、卫星轨道参数等。
最小二乘平差原理的求解一般采用数值计算方法,例如最常见的
是利用矩阵运算来求解。
通过求解观测方程组,可以得到最优的参数
估计值及其相关参数,如方差、协方差等。
最小二乘平差原理是一种较为经典的数学处理方法,它的应用广
泛且成熟。
在实际应用中,我们需要根据具体的问题和数据特点,合
理地选取模型、构建观测方程组,才能得到准确可靠的参数估计结果。
它在测量、定位、导航等领域都有重要作用,是科学研究和工程实践
中不可或缺的重要工具之一。
基于最小二乘法的GPS卫星伪距定位椭球面拟合
基于最小二乘法的GPS卫星伪距定位椭球面拟合冯汀;甘淑;袁希平【摘要】针对全球定位系统在定位过程中产生的误差的问题,提出了一种基于最小二乘法的伪距定位坐标的椭球面拟合方法.利用4颗卫星解出一组解,在三维空间中以多组卫星解出的多个定位坐标进行球面拟合,求解的球心坐标即为地面点的可靠解.从一定程度上提升了卫星数据利用率,提高了卫星定位精度.【期刊名称】《价值工程》【年(卷),期】2018(037)020【总页数】2页(P206-207)【关键词】全球定位系统;伪距定位;最小二乘法;椭球面拟合【作者】冯汀;甘淑;袁希平【作者单位】昆明理工大学国土资源工程学院,昆明650093;昆明理工大学国土资源工程学院,昆明650093;昆明理工大学国土资源工程学院,昆明650093【正文语种】中文【中图分类】P228.40 引言GPS导航定位因为其高精度、全天候、高效率、功能多、易操作等特点可用于高精度的全国大地控制网的建立,陆地海洋大地测量基准的建立,及高精度的车载导航等各个方面。
GPS定位误差来源主要有对流层折射误差,电离层延迟误差,多路径效应,与卫星及接收机时钟差等,这些误差可以通过一定的模型加以改正来减弱误差。
本文介绍了GPS定位原理,运用多组GPS卫星求得的GPS定位坐标进行球面拟合,从而减弱了GPS定位过程中的计算舍入误差。
1 误差的表现形式误差即是某一个量的观测值或计算值与其真值之差。
误差在不同的空间中具有不同的表现形式。
在一维空间中,误差Δ表现为真值M0沿一维方向的一个区间(图1);在二维空间中,误差应表现为平面内以真值M0为圆心,以误差限Δ为半径的圆形平面区域中(图2);在三维空间中,误差应表现为以真值M0为球心,以误差限Δ为球半径的球形三维区域内(图3)。
图1 误差的一维空间表现形式图2 误差的二维空间表现形式图3 误差的三维空间表现形式对于地面未知点M0而言,利用每一组卫星所求得的未知点M0的坐标,都是散布在三维球面的附近,因此,可以利用N组卫星求解出N组未知点的解,以N组解拟合为一个球面。
最小二乘算法 公式 gnss

最小二乘算法公式 gnssGNSS(全球导航卫星系统)是指由多颗卫星组成的系统,可提供全球范围内的位置、速度和时间等信息。
在GNSS中,最小二乘算法是一种常用的数据处理方法,用于提高定位精度和减小误差。
最小二乘算法是一种基于最小化残差平方和的优化方法。
在GNSS 定位中,残差是指观测值与预测值之间的差异。
最小二乘算法的目标是通过调整参数的估计值,使得残差平方和最小化。
GNSS定位过程中,需要收集卫星信号,并通过接收机进行信号处理和定位计算。
在信号处理阶段,接收机会对接收到的信号进行解调和解码,获取伪距观测值。
伪距观测值是卫星信号的传播时间与接收机的时钟偏差之间的差值。
最小二乘算法可以应用于GNSS中的多个环节,包括卫星轨道估计、接收机时钟校准、接收机位置估计等。
在卫星轨道估计中,最小二乘算法可以通过拟合观测值和预测值之间的残差,来估计卫星的轨道参数,从而提高定位的精度。
在接收机时钟校准中,最小二乘算法可以通过拟合接收机的观测值和预测值之间的残差,来校准接收机的时钟偏差,从而减小定位误差。
在接收机位置估计中,最小二乘算法可以通过拟合多个卫星的伪距观测值和接收机的位置预测值之间的残差,来估计接收机的位置坐标。
最小二乘算法的优点是简单易懂、计算效率高。
它可以通过求解线性方程组的正规方程或利用矩阵的特征值和特征向量来实现。
在实际应用中,最小二乘算法可以通过迭代求解的方式,逐步调整参数的估计值,以达到最小化残差平方和的目标。
然而,最小二乘算法也存在一些局限性。
首先,它假设观测误差是独立同分布的,且服从正态分布。
如果观测误差不满足这些假设,最小二乘算法的结果可能会偏离真实值。
其次,最小二乘算法对异常值敏感,即一个极端的观测值可能会对结果产生较大影响。
因此,在应用最小二乘算法时,需要对数据进行预处理,剔除异常值或采用鲁棒估计方法。
最小二乘算法是GNSS定位中常用的数据处理方法,通过最小化残差平方和来提高定位精度和减小误差。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
算, 可估计 出各类 受到不 同因素影 响 的观测值 的单
位权方差 因子 , 因此验后估计需要 较多 的冗余 观测
量, 计算量 大 , 一般 适用于静态 和快速静态定位 。
本文将 上 述 2种 精 化 方 法 相 结 合 , 采用 L S — VC E方 法 对 卫 星 高度 角 模 型 中的未 知 参 数 进行
到的残差信 息来 估计观测量 的方差 ( 协 方差 ) , 代 表 性方法有 最 小 范 数 二 次 无 偏 估 计 ( mi n i mu m n o r m
q u a d r a t i c u n b i a s e d e s t i m a t o r , MI NQ U E ) 、 最 优 不 变
二次无偏估 计 ( b e s t i n v a r i a n t q u a d r a t i c u n b i a s e d e s t i —
ma t o r , B I QU E) 、 约束最大似 然估 计 ( r e s t r i c t e d ma x i —
最 小 二乘 方 差 分 量 估 计在 G N S S差 分 定 位 随 机 模 型 精 化 中 的应 用
杨 汀 陈宜 金 陈浩 男
1 中 国矿 业 大 学 ( 北京) 地球 科 学 与 测 绘 工 程 学 院 , 北 京 市学 院路 丁 1 l号 , 1 0 0 0 8 3
摘
准确确定 。G N S S观测 量之 间存在 着物 理相 关性 、 空间相关性 、 时间相关性及 方差 不等性[ 1] , 随机模 型 即要 描述这 些特 性 。常用 的随机 模 型 主要包 括
L S — VC E方 法 最 初 由 T e u n i s s e n提 出 , 之 后 由 Te u n i s s e n ,Ami r i — S i mk o o e i等 人 完 善 。该
余 弦模 型 的基 线 向量 解 算精 度 , 指 出应根 据 实际使 用 情 况合 理 选择 随机 模 型 , 以提 高定 位 精 度 。
关 键 词 :G NS S ; 随机模型 ; 最 小二 乘 方 差 分量 估 计 ; 卫 星 高 度 角模 型 中 图分 类 号 : P 2 2 8 文 献 标 识 码 :A
要 :使 用 最 小 二 乘 方 差 分 量 估计 法 对基 于 卫 星 高度 角 随机 模 型 中 的 未知 参 数 进 行 估 计 , 通 过 实 际观 测 数
据, 以 负方 差 为 指标 , 分 析 指 数 模 型 和 各 种 三 角 函数 模 型 的 适 用 性 , 计 算 比较 等 权 模 型 、 指数模 型、 正 切 模 型 及
mu m l i k e l i h o o d ,R E ML ) 和 最 小 二 乘 方 差 分 量 估
计 州 ( 1 e a s t - s q u a r e s v a r i a n c e c o mp o n e n t e s t i ma t i o n,
第 3 7卷 第 2 期 2 0 1 7年 2月
大 地 测 量 与 地 球 动 力 学
J o u r n a l o f Ge o d e s y a n d Ge o d y n a mi c s
Vo 1 . 3 7 No . 2
Fe b.,2 Ol 7
文章编号 : 1 6 7 1 — 5 9 4 2 ( 2 0 1 7 ) 0 2 0 1 9 6 — 0 4
G NS S基线解算 主要采 用最 小二乘 方法 , 其数
学模 型( Ga u s s Ma r k o v模 型) 分 为 函数模 型 和随机
1 卫 星高 度 角 模 型 精 化 方 法
1 . 1 L S - V C E基 本 , 这 2种模 型均需
( 1 )
D( )= = =Q 一 Q o十
a i Q
i一 1
式中, Y为观 测值 向量 , x为 未 知数 向量 , A 为设 计矩 阵 , Q 为观 测量 的 方差 ( 协方 差 ) 阵, k为 观 测量 的分 类数 , Q 。 , Q 一, Q ^ 为 已知 的协 因数 阵 ,
VC E方 法基 于经 典 的最小二 乘 理论 , 使 用起 来 灵
活方 便 , 允许 自定义 权 阵 , 可 以获得 方差 ( 协方 差)
等权模 型 、 经验模型和验后估 计模 型。近代平 差理
论 中提 出 的验后 估计 , 也 称为 方 差分 量估 计 ( v a r i —
a n e e c o m p o n e n t e s t i ma t i o n , V C E ) , 是 通 过 平 差 后 得
L S — VC E计 算公 式_ 3 ] 。
观测 量 的线性 观测方 程为 :
E( ) 一 Ax
k
—
V ( ) 。经验 模 型一 般 比较 简 单 , 使 用方 便 , 适
用于动态 和静态定位 , 但该模 型与接收机 和观测 环 境相关 , 且 实 际模 型 的选 择 缺 乏 更严 谨 的理 论 依 据 。验后估 计是一种严 密的估 计算法 , 通过迭 代运
的最 小方 差估 计 量及 其 估 计 精度 , 同 时可 以使 用
假设 检验 , 如 w — t e s t 、 v — t e s t 来 判 断所 获得 的随 机 模 型 的正确性 ] 。 L S — VC E利 用矩 阵半 拉直 运算 将 随机 模 型转 换 为 Ga u s s — Ma r k o v模 型 中 函数 模 型 的形 式 , 从 而使 用最 / b - 乘 法对 随机 模 型 中 的未 知 参数 , 即 方差 ( 协方差) 分 量 进 行 估 计 。本 文 简 要 地 给 出