Matlab内置的约束优化函数用法
Matlab的fmincon函数(非线性等式不等式约束优化问题求解)

fmincon函数优化问题fmincon解决的优化模型如下:min F(X)subject to: A*X <= B (线性不等式约束)Aeq*X = Beq (线性等式约束)C(X) <= 0 (非线性不等式约束)Ceq(X) = 0 (非线性等式约束)LB <= X <= UB (参数x的取值范围)x = fmincon(fun,x0,A,b,Aeq,beq,lb,ub,nonlcon,options)fmincon是求解目标fun最小值的内部函数x0是初值A b线性不等式约束Aeq beq线性等式约束lb下边界ub上边界nonlcon非线性约束条件options其他参数,对初学者没有必须,直接使用默认的即可优化工具箱提供fmincon函数用于对有约束优化问题进行求解,其语法格式如下:x=fmincon(fun,x0,A,b)x=fmincon(fun,x0,A,b,Aeq,beq)x=fmincon(fun,x0,A,b,Aeq,beq,lb,ub)x=fmincon(fun,x0,A,b,Aeq,beq,lb,ub,nonlcon)x=fmincon(fun,x0,A,b,Aeq,beq,lb,ub,nonlcon,options)x=fmincon(fun,x0,A,b,Aeq,beq,lb,ub,nonlcon,options,P1,P2,...) [x,fval]=fmincon(...)[x,fval,exitflag]=fmincon(...)[x,fval,exitflag,output]=fmincon(...)其中,x,b,beq,lb,和ub为线性不等式约束的下、上界向量,A和Aeq为线性不等式约束和等式约束的系数矩阵矩阵,fun为目标函数,nonlcon为非线性约束函数。
显然,其调用语法中有很多和无约束函数fminunc的格式是一样的,其意义也相同,在此不在重复介绍。
matlab用外点罚函数法求解等式约束最优化问题
一、引言我们需要明确什么是等式约束最优化问题。
在实际应用中,经常会遇到这样的问题:在满足一定的条件约束下,寻找一个使得某个目标函数达到最优值的解。
而等式约束最优化问题就是在满足一系列等式约束条件的前提下,求解出目标函数的最优值和对应的解向量。
在数学领域,等式约束最优化问题有着重要的理论和实际意义,对于工程、经济、管理等领域都有着广泛的应用。
二、问题描述一个典型的等式约束最优化问题可以用如下的数学形式来描述:minimize f(x)subject to:g(x) = 0其中,f(x)是目标函数,x是自变量向量,g(x)是等式约束条件函数。
三、外点罚函数法外点罚函数法是一种常用的方法,用于求解等式约束最优化问题。
它的基本思想是通过对目标函数和约束条件进行适当的变换,将等式约束问题转化为无约束问题。
具体地,外点罚函数法通过引入罚函数,将约束条件融入到目标函数中,构造出一个新的优化问题。
然后将这个新问题求解为原问题的近似解。
在优化的过程中,罚函数的惩罚项会惩罚那些违反约束条件的解,从而使得优化过程能够逼近满足约束条件的最优解。
四、matlab中的外点罚函数法求解在matlab中,可以利用现成的优化工具箱来求解等式约束最优化问题。
其中,fmincon函数是用来求解带有等式约束的最优化问题的。
它允许用户自定义目标函数和约束条件函数,并指定优化的初始点和其他参数。
通过在fmincon函数中调用外点罚函数法求解等式约束最优化问题,可以得到目标函数的最优值和对应的解向量。
五、实例分析为了更加直观地理解matlab中外点罚函数法的应用,我们来举一个简单的实例。
假设我们要求解如下的等式约束最优化问题:minimize f(x) = x1^2 + x2^2subject to:g(x) = x1 + x2 - 1 = 0我们需要将目标函数和约束条件转化成matlab可以识别的形式。
我们可以利用fmincon函数来求解这个最优化问题。
fmincon函数用法

fmincon函数用法fmincon是MATLAB中用于求解约束优化问题的函数,它基于非线性内点法(Interior Point Method)和序列二次规划(Sequential Quadratic Programming,SQP)算法。
[x,fval] = fmincon(fun,x0,A,b,Aeq,beq,lb,ub,nonlcon,options)其中,各个参数的含义如下:- fun:目标函数,即待优化的函数,可以是一个函数句柄,也可以是一个MATLAB函数文件。
-x0:初始值,即待优化的变量的初始估计值。
-A和b:不等式约束矩阵和不等式约束向量,方程为Ax≤b。
- Aeq和beq:等式约束矩阵和等式约束向量,方程为Aeqx = beq。
- lb和ub:变量的取值范围,即变量的下界和上界。
- nonlcon:非线性约束函数,可以是一个函数句柄,也可以是一个MATLAB函数文件。
- options:可选参数,用于指定算法的终止条件、输出格式等,可以通过optimset函数生成。
-x:优化后的变量的取值。
- fval:目标函数在优化后的变量取值处的函数值。
下面是一个使用fmincon函数求解非线性优化问题的例子:x0=[0,0];%初始值A=[];%不等式约束矩阵b=[];%不等式约束向量Aeq = []; %等式约束矩阵beq = []; %等式约束向量lb = [-1, -1]; % 变量下界ub = [1, 1]; % 变量上界nonlcon = []; % 非线性约束函数options = optimset('Display', 'iter'); % 输出详细信息[x, fval] = fmincon(fun, x0, A, b, Aeq, beq, lb, ub, nonlcon, options);在以上例子中,我们定义了一个二次函数作为目标函数,并设置了变量的下界和上界。
matlab粒子群优化算法约束条件
matlab粒子群优化算法约束条件
粒子群优化算法是一种基于群智能思想的优化算法,适用于求解非线性、非凸、多极
值函数优化问题。
该算法模拟自然界中各种生物群体的智能行为,通过模拟粒子群在解空
间中寻找最优解的过程,不断更新粒子的位置和速度,最终找到全局最优解。
在实际问题中,往往需要对求解过程加以限制,即在优化时需要考虑一些约束条件。
例如,在某些最优化问题中,决策变量必须满足线性或非线性等约束条件。
在使用粒子群
优化算法时,如何加入约束条件也是一个需要注意的问题。
具体来说,当存在约束条件时,粒子的位置和速度不能随意更新,必须满足约束条件。
常见的约束条件有:
1. 等式约束:将决策变量的取值代入等式中,得到结果必须等于某一个给定的值。
解决约束条件就需要将其纳入目标函数中,构建新的适应度函数。
在构建新的适应度
函数时,将不符合约束条件的解排除在外,只考虑满足约束条件的解。
在使用粒子群优化算法时,可以采用以下方法来处理约束条件:
1. 检查每个粒子的位置,如果违反了约束条件,就使用随机数重新生成位置。
2. 在计算适应度函数时,将不符合约束条件的解的适应度设为一个极大值,从而避
免产生影响。
3. 引入罚函数法,将不符合约束条件的解的适应度进行惩罚,使得最优解在满足约
束条件的前提下更趋向于全局最优解。
总之,在应用粒子群优化算法求解具有约束条件的最优化问题时,需要将约束条件纳
入目标函数中,并采用相应的处理方法,从而保证算法的有效性和精确性。
matlab优化函数详解

1.fminbnd进行有约束的一元函数最小值求解。
它的求解命令是:X = FMINBND(FUN,x1,x2),FUN 是目标函数,可以为表达式字符串或MATLAB自定义函数的函数柄,要求解在约束x1 <= X <= x2下的最优解X*。
还有其他一些求解命令是:x = fminbnd(fun,x1,x2,options) % options为指定优化参数选项,由OPTIMSET 设定[x,fval] = fminbnd(…) % fval为目标函数的最小值[x,fval,exitflag] = fminbnd(…) %exitflag为终止迭代的原因[x,fval,exitflag,output] = fminbnd(…) % output为优化信息说明:若参数exitflag>0,表示函数收敛于x,若exitflag=0,表示达到了最大迭代次数,exitflag<0表示函数不收敛于x;若参数output=iterations表示迭代次数,output=funccount表示函数赋值次数,output=algorithm表示所使用的算法。
例子:要求解f(x)=x3-2x-5在(0,2)之间最优解,求解命令如下:f = @(x)x.^3-2*x-5;x = fminbnd(f, 0, 2);2.fminsearch进行多变量函数的无约束优化。
格式主要有:x = fminsearch(fun,x0);%对函数fun,从x0开始搜索最优值,返回最优变量x x = fminsearch(fun,x0,options);%可以用optimset设置一些优化选项;[x,fval] = fminsearch(...);%返回f为最优函数值;[x,fval,exitflag] = fminsearch(...);%exitflag与fminbnd类似;[x,fval,exitflag,output] = fminsearch(...);%output与fminbnd类似;例子:要求函数f (x)= 100*(x(2)-x(1)^2)^2+(1-x(1))^2的最小值,用fminsearch 求解如下:fun = @(x)100*(x(2)-x(1)^2)^2+(1-x(1))^2;[x,fval] = fminsearch(fun,[-1.2, 1]);3.fminunc与fminsearch一样,也是对多变量无约束函数优化。
Matlab的fmincon函数

Matlab优化函数fmincon1.fmincon是一种局部优化函数,利用目标函数以及约束函数的一阶导数信息,从给的初始点开始,在满足约束的条件下,沿着目标函数下降的方向迭代,最后收敛到局部最优解。
约束函数不同,对应的结果当然会不一样,因为一般的多维优化问题总存在很多局部最优解,而fmincon只能找到离给的初始点最近的极小值,在你的问题中,可能在[-5,-6]区间上存在一个极小值,当然也可能是[-6,-7],因此你优化的结果会不同。
exitflag是优化结果的标志,exitflag=1说明优化收敛到局部最优解;exitflag=4、5说明你采用的是有效集算法(active-set ),也得到相应的结果;如果exitflag=0那说明你的优化失败了。
2.fmincon函数,用与解方程和拟合。
fmincon可用于局部优化,全局优化。
功能强大,若灵活运用能解决很多问题。
局部优化的语句为:X = FMINCON(FUN,X0,A,B,Aeq,Beq,LB,UB,NONLCON)全局优化的语句为:opts1 = optimset('Algorithm','interior-point');opts2 = optimset('Algorithm','sqp');opts3 = optimset('Algorithm','trust-region-reflective');opts4 = optimset('Algorithm','active-set');createOptimProblem('fmincon','objective', FUN, 'x0', X0, ...'Aineq', A, 'bineq', b, 'Aeq', Aeq, 'beq', beq, 'lb', LB, ...'ub', UB, 'nonlcon', NONLCON, 'options',opts1)gs = GlobalSearch;[x1,fval1] = run(gs,problem1)3.X0=[2 2];A=[1 0.1;-0.1 -1];B=[4;-2];Aeq=[];Beq=[];LB=[];UB=[];NONLCON=[];options = optimset('Algorithm','active-set');[X,FVAL,EXITFLAG,OUTPUT]=fmincon(@(x)x(1)^2+x(2)^2,X0,A,B,Aeq,Beq,LB,UB,N ONLCON,options)结果:X =0.1980 1.9802FVAL =3.9604EXITFLAG =1OUTPUT =iterations: 3funcCount: 12lssteplength: 1stepsize: 0.0028algorithm: 'medium-scale: SQP, Quasi-Newton, line-search' firstorderopt: 1.9757e-008constrviolation: 0message: [1x144 char]Matlab的fmincon函数(非线性等式/不等式约束优化问题求解) fmincon函数优化问题x = fmincon(fun,x0,A,b,Aeq,beq,lb,ub,nonlcon,options)fmincon是求解目标fun最小值的内部函数x0是初值A b线性不等式约束Aeq beq线性等式约束lb下边界ub上边界nonlcon非线性约束条件options其他参数,对初学者没有必须,直接使用默认的即可优化工具箱提供fmincon函数用于对有约束优化问题进行求解,其语法格式如下:x=fmincon(fun,x0,A,b)x=fmincon(fun,x0,A,b,Aeq,beq)x=fmincon(fun,x0,A,b,Aeq,beq,lb,ub)x=fmincon(fun,x0,A,b,Aeq,beq,lb,ub,nonlcon)x=fmincon(fun,x0,A,b,Aeq,beq,lb,ub,nonlcon,options)x=fmincon(fun,x0,A,b,Aeq,beq,lb,ub,nonlcon,options,P1,P2,...)[x,fval]=fmincon(...)[x,fval,exitflag]=fmincon(...)[x,fval,exitflag,output]=fmincon(...)其中,x,b,beq,lb,和ub为线性不等式约束的下、上界向量,A和Aeq为线性不等式约束和等式约束的系数矩阵矩阵,fun为目标函数,nonlcon为非线性约束函数。
matlab 中的优化算法
matlab 中的优化算法MATLAB提供了多种优化算法和技术,用于解决各种不同类型的优化问题。
以下是一些在MATLAB中常用的优化算法:1.梯度下降法:梯度下降法是一种迭代方法,用于找到一个函数的局部最小值。
在MATLAB中,可以使用fminunc函数实现无约束问题的梯度下降优化。
2.牛顿法:牛顿法是一种求解无约束非线性优化问题的算法,它利用泰勒级数的前几项来近似函数。
在MATLAB中,可以使用fminunc 函数实现无约束问题的牛顿优化。
3.约束优化:MATLAB提供了多种约束优化算法,如线性规划、二次规划、非线性规划等。
可以使用fmincon函数来实现带约束的优化问题。
4.最小二乘法:最小二乘法是一种数学优化技术,用于找到一组数据的最佳拟合直线或曲线。
在MATLAB中,可以使用polyfit、lsqcurvefit等函数实现最小二乘法。
5.遗传算法:遗传算法是一种模拟自然选择过程的优化算法,用于求解复杂的优化问题。
在MATLAB中,可以使用ga函数实现遗传算法优化。
6.模拟退火算法:模拟退火算法是一种概率搜索算法,用于在可能的解空间中找到全局最优解。
在MATLAB中,可以使用fminsearchbnd函数实现模拟退火算法优化。
7.粒子群优化算法:粒子群优化算法是一种基于群体智能的优化算法,用于求解非线性优化问题。
在MATLAB中,可以使用particleswarm函数实现粒子群优化算法。
以上是MATLAB中常用的一些优化算法和技术。
具体的实现方法和应用可以根据具体问题的不同而有所不同。
yalmip用法

yalmip用法Yalmip是一种用于数学建模和优化问题求解的MATLAB工具箱。
它提供了一套简洁而强大的语言来描述和求解各种数学优化问题。
以下是关于Yalmip用法的详细介绍。
在使用Yalmip之前,首先需要在MATLAB环境中安装并添加Yalmip工具箱。
安装完成后,我们可以开始使用Yalmip来解决各种优化问题。
Yalmip的核心概念是“变量”和“约束”。
我们可以使用sdpvar函数定义变量,例如:x = sdpvar(n,m),其中n和m分别表示变量的行数和列数。
Yalmip支持实数、整数和布尔类型的变量。
接下来,我们可以通过使用算术运算符(如+、-、*、/)和函数(如exp、sin、max等)来构建优化问题的目标函数和约束条件。
例如,我们可以使用约束运算符(<=、>=、==)来定义等式和不等式约束。
一旦我们定义了目标函数和约束条件,我们可以创建一个优化问题对象。
使用optimize函数来告诉Yalmip解决这个优化问题。
例如:optimize(Constraints, Objective, Options),其中Constraints表示约束条件,Objective表示目标函数,Options表示一些参数设置。
通过解决这个优化问题,我们可以获得最优解。
通过使用value函数来获取各个变量的最优解值。
例如:OptimalValue = value(Objective),其中Objective表示目标函数的优化值。
Yalmip不仅支持线性规划问题,还可以解决二次规划、整数规划、混合整数规划等更复杂的问题。
它还提供了许多内置的求解器,例如Gurobi、MOSEK等,可以根据实际问题的需求选择合适的求解器。
总结一下,Yalmip是一个功能强大且易于使用的MATLAB工具箱,用于解决各种数学优化问题。
通过定义变量、约束条件和目标函数,以及使用适当的求解器,我们可以轻松地求解复杂的优化问题并获得最优解。
约束优化问题的求解方法

约束优化问题的求解方法约束优化问题(Constrained Optimization Problem)是指在一个给定的约束条件下,在所有可行的解中找到最优解的问题。
这类问题在现实中广泛存在,包括物流配送、资源分配、工程设计等领域。
如何有效地求解约束优化问题是科学研究和工程实践中的一个重要问题。
求解约束优化问题的基本方法是利用数学模型和优化算法。
数学模型是对问题的抽象和表达,它将问题中的各种因素、变量、约束、目标函数都用数学符号和方程式来描述。
优化算法则是根据数学模型对解进行求解的方法和技术。
具体来说,一个典型的约束优化问题可以描述为:$$\min f(\mathbf{x})$$$$s.t. \quad g_j(\mathbf{x}) \leq 0, j=1,2,...,m$$$$h_k(\mathbf{x})=0, k=1,2,...,p$$其中,$f(\mathbf{x})$是目标函数,$\mathbf{x} = [x_1, x_2, ..., x_n]$是决策变量向量,$g_j(\mathbf{x})$是不等式约束,$h_k(\mathbf{x})$是等式约束,$m$和$p$分别是不等式约束和等式约束的数量。
对于约束优化问题,大致有以下几种求解方法。
1. 等式约束和不等式约束均为线性约束的约束优化问题可以使用线性规划方法求解。
线性规划是指目标函数和所有约束均为线性函数的优化问题。
线性规划具有较好的求解效率且有高度的理论成熟度。
目前已经有很多线性规划求解器可供使用。
例如OpenSolver、Gurobi等。
2. 不等式约束为凸函数的约束优化问题可以使用凸优化方法求解。
凸优化问题是指其目标函数和不等式约束均为凸函数的优化问题。
凸优化具有全局最优性和求解效率高的特点,其求解方法有许多,例如基于梯度的方法、基于内点的方法等。
凸优化库MATLAB Optimization Toolbox和Python库CVXPY都提供了凸优化的求解工具。
matlab fmincon函数用法
matlab fmincon函数用法fmincon函数是MATLAB中用于解决约束优化问题的函数,可以通过最小化一个多元函数的方式寻找最佳的参数组合。
本文将详细介绍fmincon 函数的用法,并以步骤为主线逐步回答相关问题。
1. 什么是约束优化问题?约束优化问题是指在满足特定约束条件下,寻找一个函数的最小值或最大值。
一个约束优化问题一般可以表达为以下形式:minimize f(x)subject to:c(x) ≤0ceq(x) = 0lb ≤x ≤ub其中,f(x)是要最小化的目标函数,c(x)是不等式约束条件,ceq(x)是等式约束条件,lb和ub是参数x的下界和上界。
2. fmincon函数的介绍fmincon函数是MATLAB中用于解决约束优化问题的函数,它的调用格式如下:[x, fval, exitflag, output] = fmincon(fun, x0, A, b, Aeq, beq, lb, ub, nonlcon, options)其中,各参数的含义如下:- fun: 目标函数句柄,即需要最小化的函数。
- x0: 初始参数猜测值。
- A, b: 不等式约束矩阵和向量,满足A*x ≤b。
- Aeq, beq: 等式约束矩阵和向量,满足Aeq*x = beq。
- lb, ub: 参数的下界和上界。
- nonlcon: 非线性约束函数句柄。
- options: 用于设置优化选项的参数对象,可以通过optimset函数创建。
fmincon函数的输出包含以下几个参数:- x: 最优解。
- fval: 目标函数在最优解处的取值。
- exitflag: 表示函数是否成功收敛的标识。
- output: 一些有关优化过程的详细信息。
3. 使用fmincon函数解决约束优化问题的步骤下面将按照步骤详细介绍如何使用fmincon函数解决约束优化问题。
# 步骤1: 定义目标函数首先需要定义一个目标函数,用于计算给定参数下的目标函数值。
matlab优化函数的使用方法
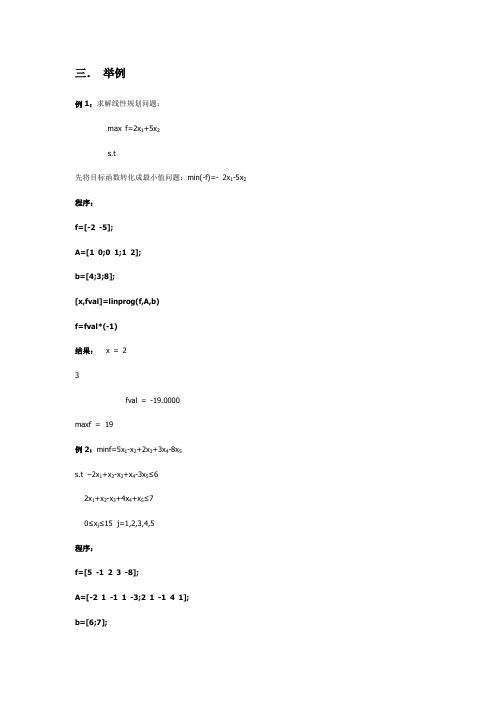
三.举例例1:求解线性规划问题:max f=2x1+5x2s.t先将目标函数转化成最小值问题:min(-f)=- 2x1-5x2程序:f=[-2 -5];A=[1 0;0 1;1 2];b=[4;3;8];[x,fval]=linprog(f,A,b)f=fval*(-1)结果:x = 23fval = -19.0000maxf = 19例2:minf=5x1-x2+2x3+3x4-8x5s.t –2x1+x2-x3+x4-3x5≤62x1+x2-x3+4x4+x5≤70≤x j≤15 j=1,2,3,4,5程序:f=[5 -1 2 3 -8];A=[-2 1 -1 1 -3;2 1 -1 4 1];b=[6;7];lb=[0 0 0 0 0];ub=[15 15 15 15 15];[x,fval]=linprog(f,A,b,[],[],lb,ub)结果:x =0.00000.00008.00000.000015.0000minf =-104例3:求解线性规划问题:minf=5x1+x2+2x3+3x4+x5s.t –2x1+x2-x3+x4-3x5≤12x1+3x2-x3+2x4+x5≤-20≤x j≤1 j=1,2,3,4,5程序:f=[5 1 2 3 1];A=[-2 1 -1 1 -3;2 3 -1 2 1];b=[1;-2];lb=[0 0 0 0 0];ub=[1 1 1 1 1];[x,fval,exitflag,output,lambda]=linprog(f,A,b,[],[],lb,ub) 运行结果:Exiting: One or more of the residuals, duality gap, or total relative errorhas grown 100000 times greater than its minimum value so far: the primal appears to be infeasible (and the dual unbounded).(The dual residual < TolFun=1.00e-008.)x = 0.00000.00001.19870.00000.0000fval =2.3975exitflag =-1output =iterations: 7cgiterations: 0algorithm: 'lipsol'lambda =ineqlin: [2x1 double]eqlin: [0x1 double]upper: [5x1 double]lower: [5x1 double]显示的信息表明该问题无可行解。
如何在Matlab中进行约束优化和约束求解
如何在Matlab中进行约束优化和约束求解在科学研究和工程应用中,经常会遇到优化问题。
而在实际问题中,往往会涉及到各种约束条件。
为了得到最优解,我们需要在考虑约束的情况下进行优化。
在本文中,我们将介绍如何在Matlab中进行约束优化和约束求解。
一、优化问题的基本概念在开始具体介绍Matlab中的约束优化和约束求解方法之前,让我们先了解一些基本的概念。
1.1 目标函数目标函数是优化问题中需要最小化或最大化的函数。
在Matlab中,我们可以使用符号表达式或函数句柄来表示目标函数。
1.2 约束条件约束条件是在优化过程中需要满足的条件。
约束条件可以分为等式约束和不等式约束。
等式约束要求某些变量之间的关系满足特定的等式,而不等式约束要求某些变量满足特定的不等式。
1.3 优化变量优化变量是在优化问题中需要找到最优解的变量。
在Matlab中,我们可以使用符号表达式或变量来表示优化变量。
二、约束优化的实现方法在Matlab中,有多种方法可以求解带有约束条件的优化问题。
下面我们将介绍几种常见的方法。
2.1 内点法内点法是一种求解约束优化问题的常用方法。
该方法通过将约束问题转化为无约束的问题,然后使用内点算法在约束域内求解最优解。
在Matlab中,我们可以使用fmincon函数来实现内点法。
该函数通过指定目标函数、约束条件和初始点等参数,来求解带有约束的优化问题。
2.2 逐步二次规划法逐步二次规划法是一种求解约束优化问题的有效方法。
该方法通过逐步迭代,不断缩小可行域并得到更优的解。
在Matlab中,我们可以使用fmincon函数的'interior-point'选项来实现逐步二次规划法。
该选项使用了内点法和二次规划的思想,来求解约束优化问题。
2.3 遗传算法遗传算法是一种模拟自然进化过程的优化方法。
该方法通过不断演化和选择适应度较高的个体,来搜索最优解。
在Matlab中,我们可以使用ga函数来实现遗传算法。
matlabfmincon函数的算法原理
matlabfmincon函数的算法原理fmincon是MATLAB中一个优化函数,用于求解约束非线性最小化问题。
它采用了一种优化算法来寻找问题的最优解。
该算法称为Sequential Quadratic Programming(SQP)。
SQP是一种迭代算法,其目标是在每次迭代中近似解决原始问题,并生成约束问题的近似次问题。
算法的一般思想是,从初始点开始,先求解一个次问题以找到一个可行的解,然后更新工作点,然后继续迭代,直到收敛到原始问题的最优解。
SQP包含以下几个主要步骤:1.初始化:选择初始点x0作为问题的起点。
2.线性化:在当前的工作点计算目标函数和约束的一阶导数,并使用这些导数构建一个线性的二次规划次问题。
3.解线性次问题:通过求解线性次问题得到一个步长Δx,该步长将用于更新工作点。
4.更新工作点:根据Δx更新工作点x,并计算近似的拉格朗日乘子。
5.终止条件:通过检查更新后的工作点是否满足终止条件来判断是否需要终止迭代。
终止条件可以是目标函数或约束函数的变化不大。
6.收敛性检查:在终止迭代之后,检查是否满足最终的收敛条件。
如果没有满足,则返回第3步并继续迭代。
fmincon函数的SQP算法在每次迭代中不断更新工作点,并使用子问题的解来逼近原问题的解。
它使用具有特定约束的二次规划求解器来解决线性次问题,并在每次迭代中调整优化参数以改善求解效果。
需要注意的是,SQP算法并不总是能够找到全局最优解。
它只能找到相对较好的局部最优解。
因此,如果要找到全局最优解,可能需要使用其他更复杂的优化算法。
总结起来,fmincon函数中的SQP算法使用迭代的方式来逼近原始约束非线性最小化问题的最优解。
它通过解决线性次问题来生成近似解,并在每次迭代中更新工作点,直到满足终止条件并收敛到最终解。
该算法是一种常用的优化算法,适用于许多实际应用中的约束最小化问题。
matlab linprog函数用法
matlab linprog函数用法介绍在数学建模和优化问题中,线性规划是一种常见的数学方法。
Matlab提供了一个名为linprog的函数,用于解决线性规划问题。
linprog函数可以帮助我们找到一组变量的最优解,以使得目标函数在一组线性约束条件下达到最小或最大值。
本文将详细介绍linprog函数的用法,包括输入参数的解释、输出结果的解释以及一些示例代码。
希望通过本文的学习,读者能够掌握linprog函数的使用方法,并能够灵活运用于实际问题中。
linprog函数的语法linprog函数的基本语法如下所示:[x, fval, exitflag, output, lambda] = linprog(f, A, b, Aeq, beq, lb, ub, x0, o ptions)下面对每个参数进行详细解释:•f:一个n×1的向量,表示目标函数的系数。
•A:一个m×n的矩阵,表示不等式约束的系数。
•b:一个m×1的向量,表示不等式约束的右侧常数。
•Aeq:一个p×n的矩阵,表示等式约束的系数。
•beq:一个p×1的向量,表示等式约束的右侧常数。
•lb:一个n×1的向量,表示变量的下界。
•ub:一个n×1的向量,表示变量的上界。
•x0:一个n×1的向量,表示变量的初始值。
•options:一个结构体,用于指定求解器的选项。
输出结果解释linprog函数的输出结果包括五个变量,分别是x、fval、exitflag、output和lambda。
•x:一个n×1的向量,表示最优解。
•fval:一个标量,表示目标函数在最优解处的取值。
•exitflag:一个整数,表示求解器的退出状态。
•output:一个结构体,包含求解器的详细输出信息。
•lambda:一个结构体,包含最优解的约束条件的拉格朗日乘子。
示例代码下面通过几个示例代码来演示linprog函数的用法。
intlinprog在matlab中的用法 -回复

intlinprog在matlab中的用法-回复[intlinprog在matlab中的用法][intlinprog]函数是MATLAB工具箱中的优化函数之一,用于解决整数规划(Integer Linear Programming,ILP)问题。
整数规划是一个数学优化问题,旨在找到满足一组线性约束条件的整数变量的最优解。
在本文中,我们将一步一步地介绍[intlinprog]函数的用法及其在实际问题中的应用。
第一步:定义优化问题在使用[intlinprog]函数解决整数规划问题之前,我们首先需要定义要解决的优化问题。
整数规划问题可以用数学形式表示为:minimize c'xsubject toA*x ≤bAeq*x = beqlb ≤x ≤ubx ∈Z^n其中,x是包含整数变量的列向量,c,A,b,Aeq和beq是给定的系数矩阵,lb和ub是变量下限和上限的向量,n是变量的数量。
第二步:使用[intlinprog]函数进行求解一旦我们定义了优化问题,我们就可以使用[intlinprog]函数来解决整数规划问题。
其基本语法如下:matlab[x, fval, exitflag, output] = intlinprog(f, intcon, A, b, Aeq, beq, lb, ub)- [x]:是优化问题的最优解,即整数规划的最优整数解。
- [fval]:是在最优解下的目标函数值。
- [exitflag]:是一个二进制值,指示求解器退出的原因,如果为1,则表示找到了有限最优解。
- [output]:是一个结构体,包含有关求解过程的信息。
`f` 是目标函数的系数向量,`intcon` 是整数变量的索引向量,`A`,`b`,`Aeq`,`beq`,`lb` 和`ub` 分别是系数矩阵及其对应的约束条件。
第三步:一个简单示例让我们通过一个简单的示例来演示[intlinprog]函数的使用。
假设我们有以下整数规划问题:maximize 3x1 + 5x2subject to-x1 + x2 ≤10 ≤x1 ≤10 ≤x2 ≤1x1 和x2 为整数我们可以按照以下步骤使用[intlinprog]函数解决这个问题:1. 定义目标函数的系数向量`f`,约束条件的系数矩阵`A` 和`Aeq`,以及对应的右侧向量`b` 和`beq`。
曲线拟合 约束条件 matlab

曲线拟合约束条件matlab曲线拟合是一种常见的数据分析方法,它可以通过拟合一条曲线来描述数据的趋势。
在实际应用中,我们经常需要对曲线拟合进行约束,以满足特定的需求。
Matlab作为一种常用的数学软件,提供了多种方法来实现曲线拟合和约束条件的处理。
一、曲线拟合Matlab提供了多种曲线拟合函数,包括polyfit、lsqcurvefit、fit等。
其中,polyfit函数可以用于拟合多项式曲线,lsqcurvefit函数可以用于拟合任意曲线,fit函数可以用于拟合多种函数形式的曲线。
这些函数都可以通过输入数据点的坐标来进行曲线拟合。
例如,使用polyfit函数进行二次曲线拟合:```matlabx = 0:0.1:10;y = 2*x.^2 + 3*x + 1 + randn(size(x));p = polyfit(x,y,2);```其中,x和y分别为数据点的横纵坐标,p为拟合出的二次曲线的系数。
二、约束条件在实际应用中,我们经常需要对曲线拟合进行约束,以满足特定的需求。
例如,我们可能需要对曲线的斜率、截距、曲率等进行约束。
Matlab提供了多种方法来实现约束条件的处理。
1. 使用lsqnonlin函数lsqnonlin函数可以用于非线性最小二乘问题的求解,可以通过设置约束条件来实现曲线拟合的约束。
例如,我们可以使用lsqnonlin函数对一条曲线的斜率进行约束:```matlabx = 0:0.1:10;y = 2*x.^2 + 3*x + 1 + randn(size(x));fun = @(p)myfun(p,x);p0 = [1,1];lb = [-Inf,-1];ub = [Inf,1];p = lsqnonlin(fun,p0,lb,ub);```其中,myfun函数为自定义的函数,用于计算误差,p0为初始值,lb和ub分别为约束条件的下限和上限。
2. 使用fmincon函数fmincon函数可以用于非线性约束优化问题的求解,可以通过设置约束条件来实现曲线拟合的约束。
matlab moo函数用法 -回复
matlab moo函数用法-回复标题:详解MATLAB中的moo函数用法引言:MATLAB是一种强大而灵活的数学和科学编程语言,广泛用于工程、物理学、金融等领域的数据分析和模拟。
其中,moo函数是MATLAB提供的一个重要工具,用于多目标优化,帮助用户在多个目标函数的约束下找到最优解。
本文将详细介绍moo函数的使用方法,包括参数设定、输入输出以及实际案例分析,帮助读者更好地理解和应用该函数。
一、什么是moo函数moo函数全称为Multi-Objective Optimization(多目标优化),是MATLAB优化工具箱中的一个重要函数。
moo函数的目标是在多个目标函数的约束下,寻找一组最优解,即帮助用户在各个目标之间找到最优平衡。
与传统的单目标优化算法相比,moo函数能够在一个运算过程中同时优化多个目标函数,提供更加全面的解决方案。
二、moo函数的参数设定使用moo函数前,需要对其参数进行合理设定,以满足具体的优化需求。
主要包括以下几个方面:1. 目标函数(Objective Functions):moo函数的第一个参数是一个目标函数组成的向量或函数句柄。
该向量或函数句柄用于定义需要优化的目标。
目标函数可以是凸的、线性的、非线性的或混合的。
2. 目标约束(Objective Constraints):对于每个目标函数,用户可以设定相应的约束条件。
目标约束用于限制目标函数的范围或形式。
用户可以自定义约束函数或使用现有的约束函数库。
3. 优化变量(Optimization Variables):用户需要定义一个向量或矩阵作为优化变量,表示待优化的参数。
各个目标函数可以依赖于这些变量。
4. 目标权重(Objective Weights):通过设定目标权重,用户可以调整各个目标在最终优化结果中的重要性。
权重较大的目标函数将更加被重视。
5. 约束函数(Constraint Functions):如果优化问题中存在约束条件,则可以通过约束函数进行设定。
Matlab内置的约束优化函数用法
s.t.
x = fmincon(@myfun,x0,A,b,Aeq,beq,lb,ub,@mycon)
where mycon is a MATLAB function such as function [c,ceq] = mycon(x) c = ... % Compute nonlinear inequalities at x. ceq = ... % Compute nonlinear equalities at x.
例1 线性约束fmincon linprog也可解此类问题
lingprog
f=[5 3]; A=[5 3;-1 -1;-1 0;0 -1]; b=[70;-15;-5;0]; x0=[0;0]; [x,fval]=linprog(f,A,b,[ ],[ ],[],[],x0)
x = linprog(f,A,b,Aeq,beq,lb,ub,x0)
• function f = rosenbrock(x) • f = 100*(x(2) - x(1)^2)^2 + (1 - x(1))^2;
• function [c, ceq] = unitdisk(x) • c = x(1)^2 + x(2)^2 - 1; • ceq = [ ];
function [c,ceq] = mycon(x) c = ... % Compute nonlinear inequalities at x. ceq = ... % Compute nonlinear equalities at x.
A=[5 3;-1 -1]; b=[70;-15]; x0=[0;0]; lb=[5;0]; [x, fval] = fmincon(@ros,x0,A,b,[],[],lb)
optimproblem在matlab中的用法
optimproblem在matlab中的用法OptimProblem在Matlab中的用法OptimProblem是Matlab中用于定义优化问题的一种数据类型。
它允许用户以数学公式的形式定义目标函数和约束条件,在求解优化问题时提供了很大的便利性。
以下是OptimProblem在Matlab中的一些常见用法的详细讲解。
创建优化问题用户可以通过OptimProblem类创建优化问题对象。
以下是创建优化问题的基本步骤: 1. 导入优化工具箱:首先,在Matlab中导入优化工具箱,以便使用OptimProblem类。
2. 定义目标函数:使用Matlab的符号计算功能,创建一个符号函数,表示优化问题的目标函数。
3. 定义约束条件:使用Matlab的符号计算功能,创建一个符号函数组成的向量,表示优化问题的约束条件。
4. 创建优化问题对象:使用OptimProblem类的构造函数,创建一个优化问题对象,并将目标函数和约束条件作为参数传递给构造函数。
设置优化问题的类型在创建优化问题对象后,用户可以通过设置问题的类型来定义问题的性质。
以下是一些常见的问题类型: - 最小化问题:用户可以设置目标函数的类型为最小化,以使得优化求解器能够找到目标函数的最小值。
- 最大化问题:用户可以设置目标函数的类型为最大化,以使得优化求解器能够找到目标函数的最大值。
- 等式约束问题:用户可以将所有约束条件分组为等式约束,以确定优化问题的可行解集。
- 不等式约束问题:用户可以将所有约束条件分组为不等式约束,以确定优化问题的可行解集。
添加变量优化问题通常涉及到一些变量,用户可以使用OptimProblem对象的addVariable方法来添加变量。
以下是一些添加变量的常用方式:- 添加连续变量:用户可以使用addVariable方法,将连续变量添加到优化问题中。
连续变量没有限制条件,可以取任意实数值。
- 添加离散变量:用户可以使用addVariable方法,并指定变量的取值范围和步长来添加离散变量。
optimproblem函数

optimproblem函数最优化问题是求解最大值或最小值的问题,通常包含一个目标函数和一系列约束条件。
MATLAB中的optimproblem函数是一个优化问题对象,它提供了一种方便的方式来表示和求解优化问题。
optimproblem函数可以用来定义多种类型的优化问题,包括线性规划、非线性规划、整数规划、二次规划等。
通过optimproblem函数,用户可以按照自己的需求设置目标函数和约束条件,并在求解后得到最优解。
在使用optimproblem函数时,用户需要先定义一个问题对象,并使用addObjective和addConstraint函数分别添加目标函数和约束条件。
在定义目标函数时,可以选择最小或最大化目标函数并设置权重。
在添加约束条件时,可以设置等式约束或不等式约束,还可以设置下限和上限等约束条件。
例如,下面是一个简单的线性规划问题的代码:p = optimproblem;x = optimvar('x', 3);p.Objective = x(1) + 2*x(2) - 3*x(3);p.Constraints.cons1 = sum(x) <= 1;p.Constraints.cons2 = x(1) + x(3) >= 1/3;sol = solve(p);上面的代码定义了一个线性规划问题,包含一个目标函数和两个约束条件。
其中,变量x是一个长度为3的向量,通过optimvar函数定义。
目标函数是x(1)+2*x(2)-3*x(3),使用Objective属性设置。
两个约束条件分别用Constraints属性定义,设置了两个不等式约束。
最后,通过solve函数求解该问题,得到最优解。
在这个例子中,最优解包括每个变量的取值和最优的目标函数值。
如果需要,用户还可以得到其他相关信息,例如求解时间和求解器使用的算法等。
总之,optimproblem函数是MATLAB优化工具箱中的一个重要函数,提供了一个方便和灵活的方式来定义和求解不同类型的优化问题。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
[x,fval] = fmincon(@rosenbrock,[0 0], [],[],[],[],[],[],@unitdisk)
例3 线性和非线性约束 fmincon
x = fmincon(fun,x0,A,b,Aeq,beq,lb,ub,nonlcon,options)
例4 Constrained Minimization Using patternsearch
A=[5 3;-1 -1]; b=[70;-15]; x0=[0;0]; lb=[5;0]; [x, fval] = fmincon(@ros,x0,A,b,[],[],lb)
x = fmincon(fun,x0,A,b,Aeq,beq,lb,ub,nonlcon,options)
例2: Rosenbrock‘s Function 非线性约束fmincon
patternsearch
function y = simple_objective(x) y = (4 - 2.1*x(1)^2 + x(1)^4/3)*x(1)^2 + x(1)*x(2) + (-4 + 4*x(2)^2)*x(2)^2;
function [c, ceq] = simple_constraint(x) c = [1.5 + x(1)*x(2) + x(1) - x(2); -x(1)*x(2) + 10]; ceq = [];
s.t.
x = fmincon(@myfun,x0,A,b,Aeq,beq,lb,ub,@mycon)
where mycon is a MATLAB function such as function [c,ceq] = mycon(x) c = ... % Compute nonlinear inequalities at x. ceq = ... % Compute nonlinear equalities at x.
约束优化-Matlab
fmincon
• • • • help fmincon doc fmincon type fmincon Edit fmincon
• x = fmincon(fun,x0,A,b,Aeq,beq,lb,ub,nonlcon,options)
Karush-Kuhn-Tucker (KKT) conditions
f=[5 3]; A=[5 3;-1 -1]; b=[70;-15]; x0=[0;0]; lb=[5;0]; [x,fval]=linprog(f,A,b,[ ],[ ],lb,[],x0)
x = linprog(f,A,b,Aeq,beq,lb,ub,x0)
function f=ros(x) f=5*x() + 3*x(2);
例1 线性约束fmincon linprog也可解此类问题
lingprog
f=[5 3]; A=[5 3;-1 -1;-1 0;0 -1]; b=[70;-15;-5;0]; x0=[0;0]; [x,fval]=linprog(f,A,b,[ ],[ ],[],[],x0)
x = linprog(f,A,b,Aeq,beq,lb,ub,x0)
options = psoptimset('PlotFcns',{@psplotbestf,@psplotmaxconstr},'Display','ite r'); [x,fval] = patternsearch(ObjectiveFunction,X0,[],[],[],[],LB,UB,ConstraintFunct ion,options)
• function f = rosenbrock(x) • f = 100*(x(2) - x(1)^2)^2 + (1 - x(1))^2;
• function [c, ceq] = unitdisk(x) • c = x(1)^2 + x(2)^2 - 1; • ceq = [ ];
function [c,ceq] = mycon(x) c = ... % Compute nonlinear inequalities at x. ceq = ... % Compute nonlinear equalities at x.
ObjectiveFunction = @simple_objective; X0 = [0 0]; % Starting point LB = [0 0]; % Lower bound UB = [1 13]; % Upper bound ConstraintFunction = @simple_constraint; [x,fval] = patternsearch(ObjectiveFunction,X0,[],[],[],[],... LB,UB,ConstraintFunction)
x = fmincon(fun,x0,A,b,Aeq,beq,lb,ub,nonlcon,options)
options = optimset('Display','iter','Algorithm','active-set'); [x,fval] = fmincon(@rosenbrock,[0 0],... [],[],[],[],[],[],@unitdisk,options)