机械手手爪设计类型及其计算演示幻灯片
机器人手部结构详解PPT课件

主讲 周兰
1
引言:
工业机器人的手部也叫末端操作器, 它直接装在工业机器人的手腕上用于 夹持工件或让工具按照规定的程序完 成指定的工作。
2
一、手部的特点
3
1.手部与手腕相连处可拆卸:
手部与手腕处有可拆卸的机械接口: 根据夹持对象的不同,手部结构会有 差异,通常一个机器人配有多个手部 装置或工具,因此要求手部与手腕处 的接头具有通用性和互换性。
33
4.自适应吸盘:
结构特点:
该吸盘具有一个 球关节,使吸盘 能倾斜自如,适 应工件表面倾角 的变化。
34
5.异形吸盘:
结构特点:
可用来吸附鸡蛋、 锥颈瓶等物件。 扩大了真空吸盘 在机器人上的应 用。
35
6.喷气式吸盘:
工作原理:
压缩空气进入喷嘴后,利用伯努利效应,当压缩 空气刚进入时,由于喷嘴口逐渐缩小,致使气流 速度逐渐增加。当管路截面收缩到最小处时,气 流速度达到临界速度,然后喷嘴管路的截面逐渐 增加,使与橡胶皮碗相连的吸气口处,造成很高 的气流速度而形成负压。
手部可能还有一些电、气、液的接口: 由于手部的驱动方式不同造成。对这 些部件的接口一定要求具有互换性。
4
2.手部是末端操作器:
可以具有手指,也可以不具有手指; 可以有手爪,也可以是专用工具。
5
末端操作器图例(1):
每个手指有三个或 四个关节。技术关 键是手指之间的协 调控制。
6
末端操作器图例(2):
工件必须有可靠的定位,保持工件和手爪之间的准 确的相对位置关系,以保持机器人后续作业的准确 性。 握住:确保工件在搬运过程中或零件装配过程中定 义了的位置和姿态的准确性。 释放:在指定位置结束手部和工件之间的约束关系。
PPT课件—工业机器人集成系统数字化设计与仿真2.6.2 平口手爪

图2-257 绘制草图
6.2 平口手爪
(5)选择“菜单”→“插入”→“设计特征”→“圆柱”,弹出“圆柱”对话框,选择如图2-258所示 的半径为“指定矢量”,“指定点”为直径48的圆与半径的交点,“直径”输入8,“高度”输入0.5, 单击“应用”,创建一圆柱体。重复操作,在“圆柱”对话框中,“直径”输入5,“高度”输入7.5, “布尔”操作选择“合并”,选中直径8,高0.5的圆柱体,单击“应用”。重复上述操作,创建6个圆柱 体。
(22)选择“倒斜角”快捷工具,或选择“菜单”→“插入”→“细节特征”→“倒斜角”,可弹 出“倒斜角”对话框,“选择边”如图2-275所示,“距离”为1,单击“确定”。
图2-275 倒斜角
6.2 平口手爪
(23)选择“菜单”→“插入”→“基准/点”→“基准平面”,弹出“基准平面”对话框。如图2-276 所示,“类型”为“按某一距离”,“平面参考”基准坐标系YZ平面,“距离”输入39,单击“确定”, 插入一基准平面。
图2-289 插入基准平面
6.2 平口手爪
图2-263 创建圆台并求差
6.2 平口手爪
(11)单击“拉伸”快捷命令,弹出“拉伸”对话框,“曲线规则”选择“单条曲线”。选择如图 2-264所示的草图曲线,“指定矢量”为-ZC,“开始距离”为-1,“结束距离”为9,单击“确 定”。
图2-264 拉伸实体
6.2 平口手爪
(12)选择“减去”快捷工具,弹出“求差”对话框,选择目标体为步骤(2)创建的拉伸实体,选择 工具体为步骤(11)创建的拉伸实体,勾选“保存工具”,单击“确定”。单击“拉伸”快捷命令,弹 出“拉伸”对话框,“曲线规则”选择“单条曲线”。选择如图2-265所示的两个圆,“指定矢量”为 -ZC,“开始距离”为-1,“结束距离”为9,“布尔”操作选择减去,对象为步骤(11)创建的实体, 单击“确定”。
工业机器人课件2.2手部设计-2.3腕部设计

类人机器人的手部
具有多关节的三指手
No.40
类人机器人的手部
1
4
2
3
5
6
11 10
7
9
8
1,9-适应弹簧 2,3,8-连杆 4-食指 5-中指 6-无名指 7-小指 10-蜗轮 11-驱动杆
贝尔格莱德手
No.41
BH-4型灵巧手有四个 手指,每个手指有4个关节, 4个手指共16个自由度,其 关节由齿轮传动,包括直流 伺服电机、行星减速器和光 码盘在内的电机单元驱动。 光码盘用于测量电机轴相对 转角,关节轴绝对转角由电 位计测量。
在张启先院士的主持下, 北京航空航天大学机器人 研究所于80年代末开始 灵巧手的研究与开发。
灵巧手有三个手指,每 个手指有3个关节,3个 手指共9个自由度,微电 机放在灵巧手的内部,各 关节装有关节角度传感器, 指端配有三维力传感器, 采用两级分布式计算机实 时控制系统。
北航研制的BH-3灵巧手 北航研制的BH-4灵巧手 No.42
No.16
二、传动机构——其它结构型式
重力式手爪
No.17
二、传动机构——其它结构型式
拨杆杠杆式钳爪
No.18
二、传动机构——其它结构型式
内撑式三指钳爪
No.19
2.2.1 钳爪式手部的设计
三、钳爪式手部的设计要点
应具有足够的夹紧力 应具有足够的张开角 应能保证工件的可靠定位 应具有足够的强度和刚度 应适应被抓取对象的要求 应尽量做到结构紧凑、重量轻、效率高 应具有一定的通用性和可互换性
2.2 手部设计
SIWR-Ⅰ型和Ⅱ型水下作业机械手模拟试验装置
No.1
2.2 手部设计
新松的装配机器人
机械手手爪设计类型及其计算[借鉴材料]
![机械手手爪设计类型及其计算[借鉴材料]](https://img.taocdn.com/s3/m/107b675f5022aaea988f0f4b.png)
斜楔杠杆式手爪02
机 特械选手材结料构形式 Page 26
斜楔杠杆式手爪03 电动机座加工自动线卸料机械手
机 特械选手材结料构形式 Page 27
适应不同直径手爪
机 特械选手材结料构形式 Page 28
槽轮自动调节位置手爪
机 特械选手材结料构形式 Page 29
柔性自适应手爪
机 特械选手材结料构形式 Page 30
机 特械选手材结料构形式 Page 15
三爪(外抓)02
机 特械选手材结料构形式 Page 16
三爪(外抓)03
机 特械选手材结料构形式 Page 17
三爪(外抓)04
机 特械选手材结料构形式 Page 18
三爪(外抓)05
机 特械选手材结料构形式 Page 19
三爪(外抓)06
机 特械选手材结料构形式 Page 20
机械手手爪设计类型及其计算
人手抓取方式有那些?
夹
捏
握
H特e选re材co料mes your footer Page 2
机械手抓取方式
捏
握
夹
H特e选re材co料mes your footer Page 3
机械手手爪从人手抓取物体中得到的结构形式
形式最多 用途最广
H特e选re材co料mes your footer Page 4
机 特械选手材结料构形式 Page 36
仿生机械手
机 特械选手材结料构形式 Page 37
机械手结构类型总结
从爪子数量来分: 两个、三个、四个或者更多 其中两爪最多 从抓取方式来分: 外卡式与内撑式 从结构形式来分:1、平行连杆
2、齿轮齿条 3、双齿轮驱动 4、斜楔杠杆式 5、槽轮滑动式 6、柔性自适应 7、真空及电磁吸附式 8、仿生机械手
机器人机械手爪综述

机器人机械手爪综述目录一、夹钳式手部设计的基本要求 (3)二、典型机械爪结构 (4)1)回转型 (4)2)移动型 (5)三、夹钳式手部的计算与分析 (9)1)夹紧力的计算 (9)2)夹紧缸驱动力计算 (11)3)计算步骤 (12)4)手爪的夹持误差分析与计算 (12)四、常用气爪 (17)1)气动手指气缸具有如下特点: (17)2)气动手指气缸主要类型与型号 (18)工业机器人的手部(亦称机械爪或抓取机构)是用来直接握持工件的部件,由于被握持工件的形状、尺寸大小、重量、材料性能、表面状况等的不同,所以工业机械手的手部结构是多种多样的,大部分的手部结构是根据特定的工件要求而设计的。
常用的手部,按其握持工件的原理,大致可分成夹持和吸附两大类。
夹持类常见的主要有夹钳式,此外还有钩托式和弹簧式。
夹持类手部按其手指夹持工件时的运动方式,可分为手指回转型和手指平移型两种,如图1所示。
吸附类中,有气吸式和磁吸式。
a)回转型内撑式b)回转型外夹式c)平移型外夹式d)钩托式e)弹簧式f)气吸式g)磁吸式图1 机械爪类型夹钳式手部是由手指、传动机构和驱动装置三部分组成的,它对抓取各种形状的工件具有较大的适应性,可以抓取轴、盘、套类零件。
一般情况下,多采用两个手指,少数采用三指或多指。
驱动装置为传动机构提供动力,驱动源有液压、气动和电动等几种形式。
常见的传动机构往往通过滑槽、斜楔、齿轮齿条、连杆机构实现夹紧或松开。
平移型手指的张开闭合靠手指的平行移动,适于夹持平板、方料。
在夹持直径不同的圆棒时,不会引起中心位置的偏移。
但这种手指结构比较复杂、体积大,要求加工精度高。
回转型手指的张开闭合靠手指根部(以枢轴支点为中心)的回转运动来完成。
枢轴支点为一个的,称为单支点回转型;为两个的,称为双支点回转型。
这种手指结构简单,形状小巧,但夹持不同工件会产生夹持定位偏差。
a)单支点回转型b)双支点回转型C)平移型(平直指)图2 回转型和平移型手指一、夹钳式手部设计的基本要求1. 应具有适当的夹紧力和驱动力。
机器手爪结构.
(1)夹钳式
传动机构:它是向手指传递运动和动力,以实现夹 紧和松开动作的机构。 1)回转型传动机构
夹钳式手部中较多的是回转型手部,其手指就是一 队(或几对)杠杆,再同斜楔、滑槽、连杆、齿轮、 蜗轮蜗杆或螺杆等机构组成复合式杠杆传动机构, 来改变传力比、传动比及运动方向等。
(1)夹钳式
回 转 型 传 动 机 构
(1)夹钳式
2)平移型传动机构 平移型夹钳式手部是通过手指的指面作直线往复运动或 平面移动来实现张开或闭合动作的,常用于夹持具有平 行平面的工件(如箱体等)。其结构较复杂,不如回转 型应用广泛。平移型传动机构据其结构,大致可分平面 平行移动机构和直线往复移动机构两种类型。
(1)夹钳式
平 移 型 传 动 机 构
(1)夹钳式 驱动装置:它是向传动机构提供动力的 装置。按驱动方式不同有液压、气动、 电动和机械驱动之分。 支架:使手部与机器人的腕或是不靠夹紧力来夹持工件,而是 利用手指对工件钩、拖、捧等动作来拖持工件。 应用钩拖方式可降低驱动力的要求,简化手部 结构,甚至可以省略手部驱动装置。它适用于 在水平面内和垂直面内作低速移动的搬运工作, 尤其对大型笨重的工件或结构粗大而质量较轻 且易变形的工件更为有利。
3.仿人机器人的手部
(1)柔性手
(2)多指灵活手
(2)钩拖式手部
有驱动装置
工作原理:依靠机构内力 来平衡工件重力而保持拖 持状态。驱动液压缸5以 较小的力驱动杠杆手指6 和7回转,使手指闭合至 拖特工件的位置。手指与 工件的接触点均在其回转 支点O1、O2的外侧,因此 在手指拖持工件后,工件 本身的重量不会使手指自 行松脱。
(2)钩拖式手部
弹簧式手部靠弹 簧力的作用将工件夹 紧,手部不需要专用 的驱动装置,结构简 单。它的使用特点是 工件进入手指和从手 指中取下工件都是强 制进行的。由于弹簧 力有限,故只适用于 夹持轻小工件。
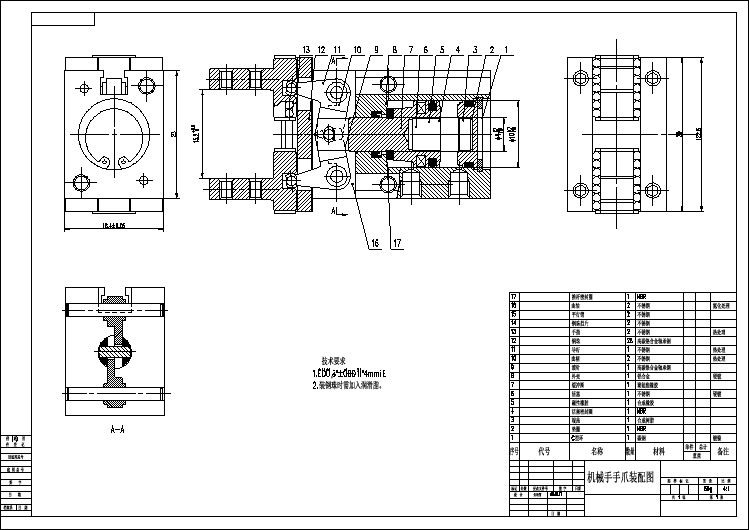
机械手手爪装配图
机械手手爪设计类型及其计算
柔性自适应手爪
机械手结构形式 Page 30
真空吸盘手爪
机械手结构形式 Page 31
码垛机械手手爪 袋装
机械手结构形式 Page 32
码垛机械手手爪 纸箱
机械手结构形式 Page 33
轮胎手爪(内撑式)
机械手结构形式 Page 34
仿生机械手
机械手结构形式 Page 35
仿生机械手指
章鱼吸盘(大面积真空 吸具)运用类型
工业机器人.pdf
比较老的书,讲机械手 手抓设计与计算等
真空吸盘计算
工件参数 材料:SUS304 表面特征:光滑、平坦、干燥 尺寸:2500x1250x2.5mm 搬运加速度:x ,y ,z轴 5m/s^2
解:(1求工件质量 m=LxWxHxρ L=长度(m) W=长度(m) H=长度(m) ρ=密度(kg/m^3)
机械手结构计算 Page 49
连杆结构计算
解:P=2*P1*SINa P1=P/(2*SINa)
因N*L1=P1*L2 N=P1*L2/L1
=P*L2/(2*L1*SINa)
机械手结构计算 Page 50
一些其它方面计算问题
机械手结构计Leabharlann Page 51Here comes your footer Page 52
机械手手爪设计类型及其计算
人手抓取方式有那些?
夹
捏
握
Here comes your footer Page 2
机械手抓取方式
捏
握
夹
Here comes your footer Page 3
机械手手爪从人手抓取物体中得到的结构形式
形式最多 用途最广
Here comes your footer Page 4
《机器手爪结构》课件

这是一份关于机器手爪结构的PPT课件,介绍了机器手爪的概述、结构、不同 类型的应用场景以及优缺点的分析。
概述
机器手爪是机器人的重要组成部分,具有抓取和握持物体的功能。本节将介 绍机器手爪的作用和应用场景。
机器手爪的结构
组成部分
机器手爪通常由指部、连杆、 运动副等组成,每个部分都 扮演着特定的角色。
材料选择
机器手爪的材料选择依赖于 应用需求,常见的材料包括 金属合金、塑料和弹性材料。
基本工作原理
机器手爪通过运动副的控制 实现开合和旋转的动作,从 而完成抓取和握持的任务。
常见的机器手爪结构类型
• 两指平行机器手爪 • 两指异形机器手爪 • 三指机器手爪 • 多指机器手爪
不同机器手爪结构的应用场景
• 两指平行机器手爪的应用场景 • 两指异形机器手爪的应用场景 • 三指机器手爪的应用点分析
优点
不同结构类型的机器手爪各有优势,能够满足不同应用需求。例如,多指机器手爪具有更好 的抓取稳定性。
缺点
机器手爪的缺点也是根据结构类型而异的,比如两指平行机器手爪在握持某些形状复杂的物 体时可能会存在困难。
总结
机器手爪结构的发展呈现出不断向着多指多动作、精准可靠的方向发展,并 将在未来的机器人应用中发挥更重要的作用。
参考文献
• 相关文献和资料已被引用,以供参考和进一步学习。
机械手手爪的三维设计

机械手手爪的三维设计1手部设计基本要求(1)应具有适当的夹紧力和驱动力。
应当考虑到在一定的夹紧力下,不同的传动机构所需的驱动力大小是不同的。
(2)手指应具有一定的张开范围,手指应该具有足够的开闭角度(手指从张开到闭合绕支点所转过的角度)△"以便于抓取工件。
(3)要求结构紧凑、重量轻、效率高,在保证本身刚度、强度的前提下,尽可能使结构紧凑、重量轻,以利于减轻手臂的负载。
(4)应保证手抓的夹持精度。
2典型的手部结构(1)回转型包括滑槽杠杆式和连杆杠杆式两种。
(2)移动型移动型即两手指相对支座作往复运动。
(3)平面平移型。
3机械手手爪的设计计算3.1选择手爪的类型及夹紧装置本设计是设计抓取圆柱形物块的机械手。
常用的工业机械手手部,按握持工件的原理,分为夹持和吸附两大类。
吸附式常用于抓取工件表面平整、面积较大的板状物体,不适合用于本方案。
本设计机械手采用夹持式手指,夹持式机械手按运动形式可分为回转型和平移型。
平移型手指的张开闭合靠手指的平行移动,这种手指结构简单,适于夹持平板和圆柱类材料,且工件径向尺寸的变化不影响其轴心的位置,其理论夹持误差为零。
通过综合考虑,本设计选择移动型手爪,采用丝杠螺母这种传动结构方式。
运行方式为电机带动直齿轮使丝杠转动继而带动手爪接触块移动,从而形成手爪的张合,当手爪抓到零件时,电机停止,手爪形成自锁,带动零件移动。
丝杆电机图1二维手爪结构图3.2手爪夹持范围计算加工毛坯尺寸:①20-①30长度:100左右毛坯质量(以钢材的密度计算):约246g-555g (按最大600g计算)装夹深度:约25mm纵向定位精度:0.1mm横向定位精度:1mm手爪接触块为橡胶,橡胶具有弹性大,定伸强度高,抗撕裂性和电绝缘性优良,耐磨性和耐旱性良好,加工性佳等特点图2手爪橡胶3.3滑动丝杠设计设计条件:需自锁丝杠长度145mm最大质量共计约1100g。
丝杠载荷:丝杠竖直时承受最大轴向力F amax=11.6N, G=mg (g取10N/kg)设计计算:(计算部分由小组成员张益完成本人参与讨论)(1)牙型、材料和许用应力采用梯形单头螺纹螺杆材料选45钢,调制处理,仃s=360N/mm2,由机械手册查表可得许用拉应力2o=—匚=120〜72N/mm (1)p3〜5手爪部分为轻载,螺母材料选耐磨铸铁。
机械手PPT2(1)
4
机械手的组成
•
机械手的基本结构由感知部分、控制部分、主机部分 和执行部分四个方面组成。采集感知信号及控制信号均由 气动缸驱动。主机部分采用了标准型材辅以模块化的装配 形式,使得气动机械手能拓展成系列化、标准化的产品。 人们根据应用工况的要求,选择相应功能和参数的模块, 像积木一样随意的组合,这是一种先进的设计思想,代表 气动技术今后的发展方向,也将始终贯穿着机械手的发展 及实用性模块化拼装的气动机械手比组合导向装置更具有 灵活的安装体系。它集成电接口和带电缆及气管的导向系 统装置,使机械手运动自如。由于采用了模块化拼装结构, 可组成立柱型气动机械手、门架型气动机械手及滑块型气 动机械手,及其它各种类型的机械手。这些模块化机械手 组装方便,动作灵活,具有较高的定位精度,但工作空间 比较小,主要应用于一般的送料自动线上。气动机械手具 有三个自由度,即水平(Z)方向自由度、垂直(Y)方向自由 度和旋转自由度,并可以采用多种灵活的控制方案。
8
机械手流程图
• 根据分析可得出机械手的工作流程图, 如下图所示。
9
实现要求功能需要如下条件(1)
•
•
(1)底座与横梁之间需要旋转盘,旋转盘的驱动由电机 来完成,普通电机转速较高,需要考虑安装减速机,在这 种频繁启动制动的场合下,选用低速电机会更方便。 • (2)横梁在普通情况下,长度是固定的,如果工作台不 进行调整,横梁长度可永远不变。课题任务也未作横梁要 求,但在实际应用中,可能出现工作台距离调整的情况, 为增加机械手的通用性,本设计中在横梁上安装了执行气 缸,可使用手动按钮调整横梁长度。 • (3)竖直方向上是频繁上下工作的机构,可选用电机传 动的齿轮齿条啮合机构,也可选用执行气缸,后者是新技 术更经济、环保、噪音低,也更符合课题要求。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
三爪(外抓)06
机 He械re手co结m构es形y式our fPoaogteer 20 Page 20
三爪(外抓)07
机 He械re手co结m构es形y式our fPoaogteer 21 Page 21
带纠正功能可 参考视频
三爪(外抓)08
机 He械re手co结m构es形y式our fPoaogteer 22 Page 22
用途较少
移动式可适应抓 取物体直径变化
平行连杆两爪01
机 He械re手co结m构es形y式our fPoaogteer 5 Page 5
平行连杆两爪02
机 He械re手co结m构es形y式our fPoaogteer 6 Page 6
平行连杆两爪03
机 He械re手co结m构es形y式our fPoaogteer 7 Page 7
槽轮自动调节位置手爪
机 He械re手co结m构es形y式our fPoaogteer 29 Page 29
柔性自适应手爪
机 He械re手co结m构es形y式our fPoaogteer 30 Page 30
真空吸盘手爪
机 He械re手co结m构es形y式our fPoaogteer 31 Page 31
仿生机械手
机 He械re手co结m构es形y式our fPoaogteer 35 Page 35
仿生机械手指
机 He械re手co结m构es形y式our fPoaogteer 36 Page 36
仿生机械手
机 He械re手co结m构es形y式our fPoaogteer 37 Page 37
机械手结构类型总结
从爪子数量来分: 两个、三个、四个或者更多 其中两爪最多 从抓取方式来分: 外卡式与内撑式 从结构形式来分:1、平行连杆
2、齿轮齿条 3、双齿轮驱动 4、斜楔杠杆式 5、槽轮滑动式 6、柔性自适应 7、真空及电磁吸附式 8、仿生机械手
机 He械re手co结m构es形y式our fPoaogteer 38 Page 38
机 He械re手co结m构es形y式our fPoaogteer 45 Page 45
机械手抓图册
汽车行业机械手抓 手.pdf
汽车行业机械手抓图册 大概有73种抓手装配图
工业机械手图册.p df
比较老的书,讲机械手 方案设计
斜楔杠杆式手爪02
机 He械re手co结m构es形y式our fPoaogteer 26机械手
机 He械re手co结m构es形y式our fPoaogteer 27 Page 27
适应不同直径手爪
机 He械re手co结m构es形y式our fPoaogteer 28 Page 28
仿生机械手视频
仿 He生re机co械m手es视y频ourfoPoategre 39Page 39
仿生机械手视频
Here comes your footer Page 40
机械手结构设计时需要注意的细节
一、定位方式 二、易互换 三、灵巧,布线合理 四、稳定可靠
机 He械re手co结m构es形y式our fPoaogteer 41 Page 41
平行连杆两爪04
机 He械re手co结m构es形y式our fPoaogteer 8 Page 8
平行连杆两爪05
机 He械re手co结m构es形y式our fPoaogteer 9 Page 9
平行连杆两爪06
机 He械re手co结m构es形y式our fPoaogteer 10 Page 10
三爪内撑结构
机 He械re手co结m构es形y式our fPoaogteer 23 Page 23
连杆结构四爪
机 He械re手co结m构es形y式our fPoaogteer 24 Page 24
斜楔杠杆式手爪01
机 He械re手co结m构es形y式our fPoaogteer 25 Page 25
双齿轮手爪02
机 He械re手co结m构es形y式our fPoaogteer 14 Page 14
三爪(外抓)01
机 He械re手co结m构es形y式our fPoaogteer 15 Page 15
三爪(外抓)02
机 He械re手co结m构es形y式our fPoaogteer 16 Page 16
码垛机械手手爪 袋装
机 He械re手co结m构es形y式our fPoaogteer 32 Page 32
码垛机械手手爪 纸箱
机 He械re手co结m构es形y式our fPoaogteer 33 Page 33
轮胎手爪(内撑式)
机 He械re手co结m构es形y式our fPoaogteer 34 Page 34
机械手手爪设计类型及其计算
人手抓取方式有那些?
夹
捏
握
Here comes your footer Page 2
机械手抓取方式
捏
握
夹
Here comes your footer Page 3
机械手手爪从人手抓取物体中得到的结构形式
形式最多 用途最广
Here comes your footer Page 4
平行连杆两爪06
机 He械re手co结m构es形y式our fPoaogteer 11 Page 11
齿轮齿条两爪
机 He械re手co结m构es形y式our fPoaogteer 12 Page 12
双齿轮手爪01
机 He械re手co结m构es形y式our fPoaogteer 13 Page 13
机械手手爪参考视频
机 He械re手co结m构es形y式our fPoaogteer 42 Page 42
定位方式
机 He械re手co结m构es形y式our fPoaogteer 43 Page 43
易互换
机 He械re手co结m构es形y式our fPoaogteer 44 Page 44
布线合理
三爪(外抓)03
机 He械re手co结m构es形y式our fPoaogteer 17 Page 17
三爪(外抓)04
机 He械re手co结m构es形y式our fPoaogteer 18 Page 18
三爪(外抓)05
机 He械re手co结m构es形y式our fPoaogteer 19 Page 19