互补滤波在直立控制算法的应用探究
基于互补滤波的飞行器姿态解算
姿态解算一、主线姿态表示方式:矩阵表示,轴角表示,欧拉角表示,四元数表示。
惯性测量单元IMU(Inertial Measurement Unit):MPU6050芯片,包含陀螺仪和加速度计,分别测量三轴加速度和三轴角速度。
注意,传感器所测数据是原始数据,包含了噪声,无法直接用于飞行器的姿态解算,因此需要对数据进行滤波。
滤波算法:非线性互补滤波算法,卡尔曼滤波算法,Mahony互补滤波算法。
二、知识点补充加速度计和陀螺仪加速度计:加速度计,可以测量加速度,包括外力加速度和重力加速度,因此,当被测物体在静止或匀速运动(匀速直线运动)的时候,加速度计仅仅测量的是重力加速度,而重力加速度与R坐标系(绝对坐标系)是固连的,通过这种关系,可以得到加速度计所在平面与地面的角度关系也就是横滚角和俯仰角。
把加速度传感器水平静止放在桌子上,它的Z轴输出的是1g的加速度。
因为它Z轴方向被重力向下拉出了一个形变。
可惜的是,加速度传感器不会区分重力加速度与外力加速度。
所以,当系统在三维空间做变速运动时,它的输出就不正确了,或者说它的输出不能表明物体的姿态和运动状态。
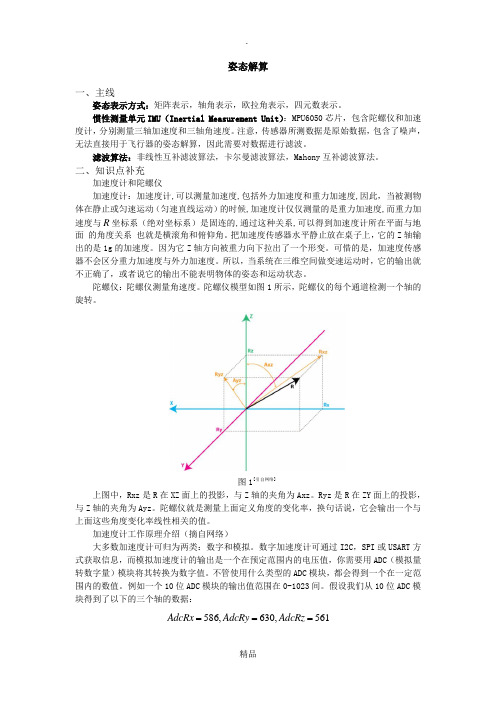
陀螺仪:陀螺仪测量角速度。
陀螺仪模型如图1所示,陀螺仪的每个通道检测一个轴的旋转。
图1[引自网络]上图中,Rxz是R在XZ面上的投影,与Z轴的夹角为Axz。
Ryz是R在ZY面上的投影,与Z轴的夹角为Ayz。
陀螺仪就是测量上面定义角度的变化率,换句话说,它会输出一个与上面这些角度变化率线性相关的值。
加速度计工作原理介绍(摘自网络)大多数加速度计可归为两类:数字和模拟。
数字加速度计可通过I2C,SPI或USART方式获取信息,而模拟加速度计的输出是一个在预定范围内的电压值,你需要用ADC(模拟量转数字量)模块将其转换为数字值。
不管使用什么类型的ADC模块,都会得到一个在一定范围内的数值。
例如一个10位ADC模块的输出值范围在0-1023间。
假设我们从10位ADC模块得到了以下的三个轴的数据:===586,630,561AdcRx AdcRy AdcRz每个ADC 模块都有一个参考电压,假设在我们的例子中,它是3.3V 。
mahony互补滤波算法

mahony互补滤波算法Mahony互补滤波算法是一种目前广泛应用于姿态估计的算法,它主要用于通过传感器采集的数据,来实现对运动物体的姿态估计。
相对于其他姿态估计算法,Mahony互补滤波算法不仅具有计算速度快、精度高等优点,而且其实现方式也相对简单易懂,因此广受大众欢迎。
Mahony互补滤波算法的核心思想是通过将加速度计和陀螺仪的测量结果进行合并,来获得更加准确的姿态估计数据。
与传统的卡尔曼滤波算法不同的是,Mahony互补滤波算法采用了一种比较简单的处理方式,即将滤波因子设定为常量,避免了需要进行频繁更新的矩阵运算,从而大大提高了计算速度。
Mahony互补滤波算法的具体实现可以分为两个步骤:首先是获取运动物体的姿态数据,包括加速度计、陀螺仪等传感器的测量值;其次是通过将这些数据进行滤波处理,来获得更准确的姿态估计信息。
获取姿态数据的过程中,加速度计主要用于测量物体的加速度大小和方向,从而推断出物体的姿态角度;而陀螺仪则主要用于测量物体的角速度,从而推断出物体的角度变化速率。
这两个传感器采集到的数据都非常重要,需要进行合理的处理和滤波,从而消除可能带来的误差和干扰。
对于数据的处理和滤波,Mahony互补滤波算法主要采用了一种互补滤波器的结构,这种滤波器是由两个滤波器组成的,一个是低通滤波器,另一个是高通滤波器。
低通滤波器主要用于滤去陀螺仪采集到的高频噪声信号,从而获得较为稳定的姿态信息;高通滤波器则主要用于去除加速度计的重力引起的偏移误差,从而获得准确的加速度信息。
通过优化互补滤波器的参数,Mahony互补滤波算法可以在保证计算效率的前提下,获得较为准确的姿态估计结果。
同时,Mahony互补滤波算法还可以使用其他的补偿方式,如采用积分补偿、加入陀螺仪固有漂移补偿等,进一步提高算法的性能和精度。
总的来说,Mahony互补滤波算法是一种比较高效、准确的姿态估计算法,已经在无人机飞行控制、机器人导航、运动追踪等领域得到了广泛的应用。
六轴陀螺仪互补滤波的作用
六轴陀螺仪互补滤波的作用
互补滤波是在数据融合领域中常用的一种技术,其主要作用是将多个传感器的数据进行融合,以获得更准确的结果。
在六轴陀螺仪中,互补滤波的作用主要是对陀螺仪和加速度计的数据进行融合,以获得更准确的姿态数据。
具体来说,互补滤波器会对陀螺仪和加速度计的数据进行比较,根据两者的差异来计算出设备的姿态。
因为陀螺仪的测量范围比较大,但测量精度容易受到温度、压力等因素的影响;而加速度计的测量范围比较小,但测量精度比较高。
通过将两者的数据进行融合,可以互相修正误差,获得更准确的姿态数据。
在使用六轴陀螺仪时,互补滤波器的作用非常重要。
因为在实际使用中,设备的姿态会不断变化,而陀螺仪和加速度计的数据也可能会因为各种原因而出现误差。
通过互补滤波器的数据处理,可以对这些误差进行修正,从而提高设备姿态的准确性。
特别是在一些需要高精度姿态控制的场景中,如无人机、机器人等,互补滤波的作用更加明显。
总的来说,互补滤波器的作用是对多个传感器的数据进行融合,以获得更准确的结果。
在六轴陀螺仪中,互补滤波器的作用主要是对陀螺仪和加速度计的数据进行融合,以获得更准确的姿态数据。
互补滤波器在四元数法姿态解算中的应用
航 坐标 系为 地 理 坐 标 系。坐标 系 变换 以 刚 体 定 点 转 动 为基 础 ,
载 体 坐标 系转 换 到 导 航 坐标 系的过 程 可 以 分 解 为 绕 三 个 轴 的
三 次旋 转 。
2 四元数姿态算 法
2 . 1 四元 数
四 元 数 是 最 简单 的超 复数 ,能 够 非 常 方 便 的表 示 坐标 系
出载 体 坐标 系相 对 于 导航 坐 标 系的旋 转 。
P x Q( p 0 + p 1 i + p 2 j + P 3 k ) x ( q o + q 1 i + q 2 j + q 3 k )
=
( p 0 q o - P 1 q l — P 2 q 2 - P 3 q 3 ) + ( p 0 q l + p l q o + p 2 q 3 - P 3 q 2 ) i
+ ( p 0 q 2 + p 2 q o + P 3 q 1 一 P l q 3 ) j + ( p 0 q 3 + p 3 q o + P 1 q 2 - P 2 q 1 ) k( 4 )
2 . 2 四元数 姿态 算法
四 元 数 算 法 的 实质 是 用 四元 数 运 算表 示 载体 坐 标 系 b向
导 航 坐标 系 n的 旋 转 。载 体 坐 标 系 由导航 平 台机体 轴确 定 , 导
( 1 ) 地 理 坐标 系: 地 理 坐 标 系 的 原 点 选 在 导 航 平 台 的 质 心. Z轴 沿 当地 参 考 椭球 的 法 线指 向 天 顶 , X 轴 在 当地 水 平 面 且 沿 当地 纬 度 指 向 东 . Y 轴 沿 当地 子 午 线指 向北 。 ( 2 ) 栽 体 坐标 系 : 对 于栽 体 而 言 , 原 点在 栽 体 质 心 , X 轴 指 向栽体右方 , Y 轴指 向 栽 体前 方 , 并在载体对称面 内, Z轴垂 直
单球驱动自平衡机器人的互补滤波姿态解算

单球驱动自平衡机器人的互补滤波姿态解算余义;章政【摘要】针对单球驱动自平衡机器人的低成本、高精度、实时姿态估计需求,设计一种基于比例-积分(PI)型互补滤波的姿态估计算法.在四元数姿态角更新方程的基础上,通过融合陀螺仪/加速度计的姿态信息实现对机器人水平姿态信息的估计,实现多传感器间频率点的切换.考虑到磁力计易受到干扰的情况,采用陀螺仪和磁力计单独对自平衡机器人的偏航角姿态解算,避免磁力计参与四元数姿态解算引起的水平姿态误差.实验结果表明,该互补滤波算法有效融合了陀螺仪的高频特性、加速度计和磁力计的低频特性,系统的姿态估计精度在±0.15°内.【期刊名称】《计算机工程与设计》【年(卷),期】2019(040)004【总页数】7页(P969-975)【关键词】单球驱动自平衡机器人;互补滤波;姿态解算;陀螺仪/加速度计/磁力计;四元数【作者】余义;章政【作者单位】武汉科技大学信息科学与工程学院,湖北武汉430081;武汉科技大学信息科学与工程学院,湖北武汉430081;武汉科技大学冶金自动化与检测技术教育部工程研究中心,湖北武汉430081【正文语种】中文【中图分类】TP270 引言近十年来,一类以单球体作为驱动轮的轮式自平衡机器人逐渐引起了国内外学者的关注[1-10]。
该类自平衡机器人利用万向轮与底部支撑球体的摩擦产生驱动力,实现机器人的自平衡、自旋以及全方位移动,即使在狭窄区域内机器人也能灵活移动。
根据单球驱动自平衡机器人(self-balancing robot driven by single ball, SRDSB)的动力学模型[8]分析可知,这一类机器人具有多变量、强耦合、欠驱动等非线性特征[11]。
在有效的轮球式驱动结构基础上,为了维持机器人的姿态角(俯仰、横滚和偏航)动态平衡稳定,且同时保证机器人快速、灵活的全向移动,需要精确有效的姿态解算方法实现机器人的姿态实时估计。
基于互补滤波算法的移动机器人姿态检测
2 . S h e n y a n g I n s t i t u t e o f A u t o m a t i o n , C h i n e s e A c a d e m y o f S c i e n c e s , S h e n y a n g 1 1 0 0 1 6 , C h i n a )
基 于互补 滤 波算 法的 动机 器人 姿 态检 测
・ 3 l・
基于 互补滤波算法 的移动机器人 姿态检测
符秀辉 ,赵茂鑫 , 周 文俊
( 1 . 沈 阳化工 大学 信 息工程学院 , 辽宁 沈 阳 1 1 0 1 4 2 ; 2 . 中国科学院 沈 阳 自动化研究所 , 辽宁 沈阳 1 1 0 0 1 6 )
t i a t i o n p r o c e s s i n g i s u s e d t o i mpr o v e t h e dy n a mi c c h a r a c t e r o f t h e s y s t e m a n d i t h a s a s ma l l a mo u n t o f c a l c u l a —
摘要 : 移 动机 器人 的姿 态检 测 能 够反 映 出机 体相 对 于路 面 的 实时姿 态 , 有 利 于机 器人对 行进 过程 中的 当
前姿 态做 出相应 的控 制 。针 对移 动机 器人 姿 态检 测 的要 求 , 采 用 ME MS陀螺仪 和 加 速度 计 对移 动机 器
人 在 移 动过程 中相对 于路 面的姿 态倾 角进 行 测量 并通过 互补 滤 波算 法对 其测 量 的角度 进行 解 算 。互补 滤 波算 法将加 速 度计 静 态特性 和 陀螺 仪动 态特 性有 效 融合 到一起 , 并对 互补 滤波 算 法进 行 了微 分 处理 , 提 高 了 系统 的动 态特 性 , 计 算量 小 , 从 而 实现 对机 器人行 进过 程 的路 面起 伏状 况进 行 实 时测 量 。 关键词 : 陀螺 仪 ; 加 速 度计 ; 互补 滤波 算法 ; 机 器人姿 态
mahony 互补滤波算法 -回复
mahony 互补滤波算法-回复什么是mahony互补滤波算法?Mahony互补滤波算法是一种用于姿态估计的滤波算法。
它基于准互补滤波和马哈尼滤波的结合,旨在通过从加速度计和陀螺仪数据中提取信息,估计目标的姿态。
Mahony互补滤波算法的一个主要优势是它可以结合低成本的传感器来实现高精度的姿态估计,适用于无人机、机器人、虚拟现实等应用。
Mahony互补滤波算法的原理是通过利用加速度计和陀螺仪的数据,将它们的优势相结合,实现姿态估计。
加速度计可以提供全球坐标系下的重力向量,陀螺仪提供角速度测量。
在Mahony互补滤波算法中,通过将这两种测量结果进行滤波和互补处理,从而得到更准确的姿态估计。
Mahony互补滤波算法实现的关键是借助四元数来表示姿态。
四元数是一种数学表示方法,可以用来描述三维空间中的旋转。
通过四元数的乘法和加法运算,可以实现姿态的合成和更新。
Mahony互补滤波算法通过结合姿态误差的估计和观测更新,实现了对姿态的连续校准和更新。
Mahony互补滤波算法的具体步骤如下:1. 预处理:将加速度计和陀螺仪的原始测量数据进行预处理。
包括去除零偏、低通滤波等操作,以减少噪声和误差对姿态估计的影响。
2. 四元数初始化:通过加速度计测量值计算初始四元数,用来表示初始的姿态估计。
这个初始的姿态估计可以是加速度计的测量结果,也可以是其他方式得到的估计值。
3. 更新姿态:根据陀螺仪的角速度测量值,利用四元数的更新公式,对姿态进行更新。
通过将陀螺仪的角速度乘以时间间隔得到姿态变化量,将这个变化量与当前的姿态估计进行合成,得到新的姿态估计。
4. 误差校准:根据加速度计的测量结果,计算当前姿态估计与加速度计测量结果之间的角度差,得到姿态误差。
通过增益参数和误差修正的反馈控制,将姿态误差估计量与姿态估计进行互补滤波,使得姿态估计更接近真实值。
5. 姿态输出:通过四元数转换到欧拉角的方式,将姿态估计结果输出为欧拉角形式,以便于后续应用和处理。
互补滤波算法姿态解算

地磁场向量 可不可以采用和加速度计一样的修正方法来修正? 加速度计在静止时测量的是重力加速度(0,0,1)T ,是有大小和方向的; 同理,地磁计同样测量的是地球磁场的大小和方向,只不过这个方向不再是竖直向下 而是与x轴(或者y轴)呈一个角度,与z轴呈一个角度。记作(bx,by,bz)T ,这里我 们让x轴对准北边,所以by=0,即 (bx,0,bz)T 倘若我们知道bx和bz的精确值,那么我们就可以采用和加速度计一样的修正方法来)
23
01
q q q q 2
2
2
2
0
1
2
3
这样,四元数可以用方向余弦、欧拉角表示,同样,欧拉角也可以用 方向余弦和四元数表示。
用方向余弦表示四元数
对于小角度位移,四元数参数可以用表示为
q 0
1 2
1
(1c11c22c33) 2
q 1
1
4q
c c (
)
32
23
0
三、姿态表示方法
三、姿态表示方法
C 3.1 方向余弦矩阵 方向余弦矩阵用符号
n
b 表示,是一个3*3阶的矩阵,矩阵的列表示
载体坐标系中的单位矢量在参考坐标系中的投影。
三、姿态表示方法
C 3.1 方向余弦矩阵 方向余弦矩阵用符号
n
b 表示,是一个3*3阶的矩阵,矩阵的列表示
载体坐标系中的单位矢量在参考坐标系中的投影。
q 2
1
4q
c c (
)
13
31
0
q 3
1
4q
c c (
)
21
12
互补滤波和卡尔曼滤波的融合姿态解算方法

互补滤波和卡尔曼滤波的融合姿态解算方法张栋;焦嵩鸣;刘延泉【摘要】Aiming at problem of high noise,low precision of inertial measurement unit(IMU)and low precision of classical attitude solution algorithm,a fused algorithm with complementary filtering and Kalman filtering is proposed. The algorithm establish the state equation model based on differential equation of attitude angle and choose attitude angle after compensation filtering as the observation of system. Use EKF algorithm fused measured data of gyro,accelerometer and electronic compass. To verify that the algorithm is effective,use development board with inertial sensors to test in static and dynamic condition. The results of experiments show that the algorithm fused with complementary filtering and Kalman filtering can constraint drift and noise of attitude angle in static condition and track change of attitude angle quickly in dynamic condition,thus precision of attitude angle estimation is improved.%针对捷联惯性测量单元(IMU)噪声大、精度低的缺点和常规的姿态解算算法精度不高等问题,提出了一种互补滤波和卡尔曼滤波相结合的融合算法.该算法基于姿态角微分方程建立系统的状态方程模型,利用互补滤波后的姿态角作为系统的观测量,再应用扩展卡尔曼滤波(EKF)算法融合了陀螺仪、加速度计和电子罗盘的测量数据.为验证该算法有效性,用带有传感器的开发板依次进行静态和动态测试,实验结果表明:结合了互补滤波和卡尔曼滤波的融合算法,在静态时能够抑制姿态角漂移和滤出噪声,在动态时能够快速跟踪姿态的变化,提高了姿态角的解算精度.【期刊名称】《传感器与微系统》【年(卷),期】2017(036)003【总页数】5页(P62-65,69)【关键词】卡尔曼滤波;互补滤波;姿态估计;数据融合;惯性测量单元【作者】张栋;焦嵩鸣;刘延泉【作者单位】华北电力大学自动化系,河北保定071003;华北电力大学自动化系,河北保定071003;华北电力大学自动化系,河北保定071003【正文语种】中文【中图分类】V249随着微机电系统(MEMS)技术和计算机技术的不断发展,低成本的捷联惯性测量单元(inertial measurement unit,IMU)被广泛应用在小型飞行器中,捷联惯性测量单元由陀螺仪、加速度计和电子罗盘组成。
无人机航拍摄影中的姿态控制算法研究

无人机航拍摄影中的姿态控制算法研究随着科技的不断进步,无人机摄影逐渐成为人们追捧的新兴领域。
无人机航拍摄影的成功与否与众多因素有关,其中姿态控制算法就是其中的重要环节。
本文将探讨无人机航拍摄影中的姿态控制算法研究。
一、介绍无人机航拍摄影是指利用无人机搭载摄影设备进行航拍的过程。
无人机航拍摄影的特点是可以灵活、高效地获取到不同角度、不同视角的图像和视频信息。
然而,在实现高质量的航拍作品过程中,无人机的姿态控制非常关键。
二、姿态控制算法的分类在无人机航拍摄影中,常用的姿态控制算法有以下几种:1. PID控制算法:PID控制算法是一种经典的控制算法,它通过比较实际的输出与期望的输出之间的差异,然后根据比例、积分和微分三个环节进行调整,从而实现对无人机的姿态控制。
2. 互补滤波算法:互补滤波算法是一种常用的无人机姿态解算方法,它通过将陀螺仪和加速度计的数据互相补偿和整合来获取姿态信息。
该算法简单易行,计算速度快,适用于实时的控制任务。
3. 扩展卡尔曼滤波算法:扩展卡尔曼滤波算法是一种基于贝叶斯滤波理论的姿态解算方法,通过对系统的状态进行估计,融合了陀螺仪、加速度计和磁力计等多种传感器的数据,能够更加准确地获取无人机的姿态信息。
4. 机器学习算法:机器学习算法是一种新兴的姿态控制方法,通过训练模型,使得无人机能够通过学习来适应不同的环境和任务需求,从而实现更加智能化的姿态控制。
三、姿态控制算法的性能评估指标对于无人机航拍摄影中的姿态控制算法,可以通过以下几个指标来进行性能评估:1. 稳定性:姿态控制算法的稳定性是指无人机在控制过程中的抖动程度,一般可以通过统计无人机的姿态数据来评估。
2. 鲁棒性:姿态控制算法的鲁棒性是指算法对于外界干扰的抵抗能力,比如风速、气压等变化。
鲁棒性较好的算法可以保证无人机在各种环境下都能够稳定飞行。
3. 响应速度:姿态控制算法的响应速度是指无人机在控制输入发生变化时的调整速度。
基于自适应显式互补滤波的姿态解算方法
基于自适应显式互补滤波的姿态解算方法摘要:本文提出了一种基于自适应显式互补滤波(ASECF)的姿态解算方法。
该方法利用加速度计、陀螺仪和磁力计组成的惯性测量单元获取姿态角度,并利用ASECF算法对姿态角度进行优化估计。
仿真和实验结果表明,该方法具有较好的精度和鲁棒性,能够有效应对各种干扰因素。
关键词:姿态解算,自适应显式互补滤波,惯性测量单元,加速度计,陀螺仪,磁力计1. 引言姿态解算是指通过各种传感器获取物体的运动状态,如角度、角速度、加速度等,从而确定物体的姿态。
目前,常见的姿态解算方法有基于卡尔曼滤波、基于扩展卡尔曼滤波、基于粒子滤波等。
然而,这些方法需要对系统进行较为复杂的建模和优化,且对噪声的敏感度较高,容易出现收敛困难和精度不足等问题。
2. ASECF算法原理及优点ASECF算法是一种基于滤波器的估计方法,其主要思想是对系统状态进行加权求和,使得权重的变化能够自适应地响应系统状态的变化。
ASECF算法的核心是互补滤波(CF),其主要优点有以下几个方面:1) CF算法具有良好的鲁棒性和实时性,不需要进行复杂的模型建模和优化。
2) CF算法对噪声的敏感度较低,适用于各种干扰因素严重的环境下。
3) CF算法可以适应多种系统状态的变化,包括加速度计偏移、地磁场干扰等。
基于CF算法,ASECF算法引入了一个自适应的权重因子,用于根据系统状态的变化自适应调节滤波权重。
具体地,ASECF算法将滤波器的输出与系统状态偏差之间的误差作为权重因子,通过权重因子的自适应调整提高滤波精度和鲁棒性。
3. 基于ASECF的姿态解算方法本文利用ASECF算法对惯性测量单元输出的三轴角度进行优化估计,从而实现姿态解算。
具体地,姿态角度的更新可以分为以下几个步骤:1)利用加速度计和磁力计计算出姿态角度的初值;3)利用ASECF算法对角度进行优化估计。
在ASECF算法中,权重因子的计算可以采用以下公式:$\alpha_k = \frac{\bar{x}_k^T P_{k|k-1} \bar{x}_k}{\bar{x}_k^T P_{k|k}\bar{x}_k}$其中,$\bar{x}_k$为滤波器的输出,$P_{k|k-1}$为先验估计协方差矩阵,$P_{k|k}$为后验估计协方差矩阵。
不同姿态解算在平衡车中的实现与应用
• 120•不同姿态解算在平衡车中的实现与应用贵阳学院电子与通信工程学院 古 训 陈 红双轮平衡车是一种基于“动态稳定”的两轮机器人,它利用车载陀螺仪和加速度计传感器实时检测车身姿态,控制电机的转速使平衡车保持动态稳定。
利用MPU6050常用的姿态解算有一阶互补滤波、二阶互补滤波、匹配滤波以及卡尔曼滤波等算法。
本文分别对四种算法进行分析以及实验验证,获取最佳的姿态解算方案,完成平衡车姿态角度的最佳估计,实现平衡车直立的动态稳定。
0 引言随着城市经济的发展,城市交通需求迅速增长。
为了解决城市交通的问题,引进了新的代步工具——平衡车,它体积小,便于携带,同时采用电能驱动,节能、环保,提高了人们出行的效率。
平衡车主要利用车载传感器检测车体姿态角度的变化,然后通过控制系统驱动电机,达到两轮直立自平衡的效果。
本文通过MPU6050模块(赖义汉,王凯.基于MPU6050的双轮平衡车控制系统设计[J].河南工程学院学报(自然科学版),2014,26(01):53-57)获取加速度和角速度,对车体姿态进行识别。
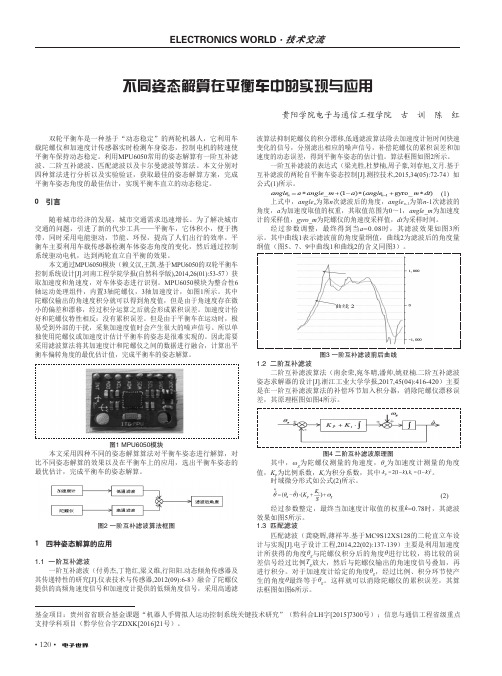
MPU6050模块为整合性6轴运动处理组件,内置3轴陀螺仪,3轴加速度计,如图1所示。
其中陀螺仪输出的角速度积分就可以得到角度值,但是由于角速度存在微小的偏差和漂移,经过积分运算之后就会形成累积误差。
加速度计恰好和陀螺仪特性相反:没有累积误差。
但是由于平衡车在运动时,极易受到外部的干扰,采集加速度值时会产生很大的噪声信号。
所以单独使用陀螺仪或加速度计估计平衡车的姿态是很难实现的。
因此需要采用滤波算法将其加速度计和陀螺仪之间的数据进行融合,计算出平衡车偏转角度的最优估计值,完成平衡车的姿态解算。
图1 MPU6050模块本文采用四种不同的姿态解算算法对平衡车姿态进行解算,对比不同姿态解算的效果以及在平衡车上的应用,选出平衡车姿态的最优估计,完成平衡车的姿态解算。
图2 一阶互补滤波算法框图1 四种姿态解算的应用1.1 一阶互补滤波一阶互补滤波(付勇杰,丁艳红,梁义维,行阳阳.动态倾角传感器及其传递特性的研究[J].仪表技术与传感器,2012(09):6-8)融合了陀螺仪提供的高频角速度信号和加速度计提供的低频角度信号,采用高通滤波算法抑制陀螺仪的积分漂移,低通滤波算法除去加速度计短时间快速变化的信号,分别滤出相应的噪声信号,补偿陀螺仪的累积误差和加速度的动态误差,得到平衡车姿态的估计值。
欧拉角的求取与互补滤波器在姿态解算中的应用

公式(5) 当然也有形如以下的表达方式:
公式(6) 当 dt 趋近于 0 时,由公式(6)可以得到旋转矩阵的导数: 其中:
k 上式中的������������ ,������������ ,������������ 分别为 IMU(惯性测量单元)的陀螺仪测得的载体坐标系下 的机体的 x,y,z 轴的角速度。比较短的时间内间隔读取陀螺仪的数据,通过上述公式就可以 实现方向余弦矩阵随时间的传递,然而,MEMS(MEMS, Micro-Electro-Mechanical System, 微机电系统)陀螺仪会发生温度漂移,同时积分去处有累积误差(积分运算的误差从哪里体 现出来?) 。如果不加以补偿,在短时间内就会积累很大的姿态误差,导致四轴飞行器控制 失效。所以必须采用一定的姿态解算算法,融合各种传感器的数据,进行误差补偿以实现精 确的姿态解算。 (3)基于互补滤波器的姿态求解器设计 陀螺仪动态响应好,但计算姿态时,会产生累积误差(积分体现在哪里,通过积分得到 欧拉角?) 。数字罗盘(也叫做电子罗盘或是三轴磁感传场感器) ,和加速度传感器测量姿态 没有累积误差,但动态响应较差。因些,它们在频域上特性互补,可以采用互补滤波器材融 合这三种传感器的数据, 提高测量精度和系统的动态性能。 也就是即不会产生积分上的累积 误差导致偏差太大, 也不会因为动态特性太差而不会丢失了实时的特性, 无法做到实时的控 制。 R— — 真实姿态方向余弦矩阵 ������ — — 表示互补滤波器计算输出的姿态方向余弦矩阵 ������0 — — 代表由加速度传感器和数字罗盘观测到的姿态方向余弦矩阵 ������������ — — 表示������0 的高频观测噪声,则������0 = R + ������������ (动态特性太差,就是高频噪声被保留了下来,导致曲线的不平滑,从信号与系统的分析角 度上来看,动态变化太大,也就是信号变化速度快,这就是信号与系统中的高频分量过多) ������������ — — 代表陀螺仪数据计算得到的姿态 ������������ — — 表示������������ 的低频累积误差,则������������ = R + ������������ (低频太差,也就是信号中的低频分量太多) 由上面的分析可以知道,要得到好的,精确度高的 R 信号,要滤除加速度计和数字罗盘 中的高频分量,还有就是陀螺仪上的低频分量。 取������������
互补滤波姿态解算

互补滤波姿态解算互补滤波姿态解算是一种常用的姿态解算方法,它通过融合加速度计和陀螺仪的数据,实现对物体的姿态角度的准确估计。
本文将详细介绍互补滤波姿态解算的原理、优点以及应用领域,以便读者了解并运用该方法。
首先,我们来了解一下互补滤波姿态解算的原理。
加速度计可测量物体在三个轴上的加速度,而陀螺仪则可以测量物体在三个轴上的角速度。
互补滤波姿态解算的思想就是通过融合这两种传感器的数据,将加速度计的低频信息和陀螺仪的高频信息相互补充,从而得到更准确的姿态角度。
具体而言,加速度计可以提供物体的方向指示,但由于重力加速度的干扰以及传感器本身的噪声等原因,其输出存在误差。
而陀螺仪则可以提供物体的角速度信息,但由于积分累积误差(称为“漂移”),其输出会随时间累积引入较大的偏差。
互补滤波姿态解算利用了这两种传感器各自的优势,通过加速度计估计与陀螺仪测量值的差异,对陀螺仪的输出进行修正,从而实现对姿态角度的准确估计。
互补滤波姿态解算具有多个优点,使其成为广泛应用的方法之一。
首先,相比于其他姿态解算方法,互补滤波具有计算简单、实现方便的特点,可适用于各种嵌入式设备和传感器系统。
其次,互补滤波姿态解算采用了加速度计和陀螺仪的互补特性,使得姿态角度的估计更加准确和稳定。
此外,互补滤波姿态解算还可以通过调整两种传感器数据的重要性权重来适应不同的应用需求,具有一定的灵活性。
互补滤波姿态解算在各个领域都有广泛的应用。
在航空航天领域,互补滤波姿态解算可以用于飞行器的姿态控制、导航和飞行参数估计等关键任务。
在智能机器人领域,互补滤波姿态解算可以用于机器人的运动控制、环境感知和自主导航等方面,提高机器人的操作精度和稳定性。
此外,互补滤波姿态解算还可以应用于虚拟现实、运动追踪、体感游戏等领域,为用户提供更加沉浸式和真实感的体验。
综上所述,互补滤波姿态解算是一种基于加速度计和陀螺仪的姿态解算方法,通过融合两种传感器的数据,实现对物体姿态角度的准确估计。
mahony 互补滤波算法
mahony 互补滤波算法1.引言1.1 概述概述部分的内容可以简要介绍mahony 互补滤波算法的背景和其在姿态估计和导航等领域的应用。
以下是可能的概述部分的内容:“随着现代技术的迅猛发展,传感器的普及促使了姿态估计和导航领域的快速发展。
在这些领域中,准确地测量和估计物体的姿态和方向至关重要。
然而,由于传感器的不完美和环境噪声的干扰,导致了姿态估计的困难。
为了克服这些挑战,研究者们提出了各种滤波算法。
其中,mahony 互补滤波算法成为近年来备受关注的一种算法。
mahony 互补滤波算法是一种基于互补滤波原理的姿态估计算法,通过结合加速度计和陀螺仪的测量数据来实现姿态的估计。
本文将深入探讨mahony 互补滤波算法的原理和应用。
首先,我们将介绍该算法的基本原理,包括其核心思想和数学模型。
然后,我们将探讨mahony 互补滤波算法在姿态估计和导航领域的广泛应用。
通过对相关研究和实际应用案例的分析,我们将评估该算法的性能和优势。
最后,我们将总结mahony 互补滤波算法的优势,并展望其未来的发展方向。
希望通过本文的阐述,读者能够深入了解和掌握mahony 互补滤波算法,并能够将其应用于实际项目中,提高姿态估计和导航的准确性和稳定性。
”1.2文章结构在文章的结构部分,将会对本文的组织和内容进行介绍。
本文主要围绕mahony互补滤波算法展开,采用以下结构进行叙述。
首先,在引言部分(Chapter 1),我们将对本文的概述进行阐述。
通过简要介绍mahony互补滤波算法的背景和相关应用,引发读者对该算法的兴趣。
接着,我们将给出文章的详细结构,为读者提供一个整体框架。
最后,明确本文的目的,明确讨论mahony互补滤波算法的目标或解决的问题。
接下来,正文部分(Chapter 2)将以Mahony互补滤波算法的原理为主要内容进行叙述。
我们将对这个算法的基本原理进行详细的解释,包括其核心概念、数学模型和主要公式。
惯性传感器和互补滤波器在姿态估计中的应用

兰建军,谭力 弓,朴 亨 ,王 鹏
L AN J i a n - j u n 。T A N L i . g o n g ,P I AO H e n g ,V v AN G P e n g
( 东北 电力大学 自动化工程学院 ,吉林 1 3 2 0 1 2 )
摘
要 :惯性测量 方法被 广泛应用 于机器人 等运动物 体的姿 态检测中 ,本文研 究利用惯性 传感器和 互 补滤 波器的优 点进行姿态 估计 。为了获 取互补滤波 器的转接 频率 ,进 行了加速度 计和陀螺仪 的动 态响应测 试 ,设计 了自适应 互补滤 波器。在双 轮直立行 走机器人 装置上对方 案进行 了验 证 ,实验数据表明 , 利用 自适应 互补滤 波算法可以准确可靠的获取机器人的姿态信息。 关键词 :惯性测量 ;姿态估计 ;惯性传感器 ;自适 应互 补滤 波器 中圈分类号 :T P2 4 2 文献标识码 :A 文章编号 :1 0 0 9 -0 1 3 4 ( 2 0 1 3 ) 0 9 ( 上) -0 0 6 5 - 0 3
y
( 1 )
波 算 法 ,算 法 可 实 现 互 补 滤 波 器 参 数 自动 调 节 。 解 决 了噪 声 干 扰 与 姿 态 最 优 估 计 问题 ,并 在 双 轮 直 立 行 走 机 器 人 装 置 上 进 行 了实 验 验 证 ,给 出 了
实验 测试 数 据 。
1 . 2 姿态解 算 传 统 的 姿 态 测 控 方 案 通 常 采 用 高 精 度航 姿 参
互 补 滤 波算 法 进 行 改进 ,提 出一 种 自适 应 互 补 滤
图 1 惯 性 坐 标 系和 物 体 坐 标 系 I 、 的欧 拉 角 构 建 示 意 图
I r ] [ - c o s ( O x  ̄ ) c o s ( e x v ) c o s ( ) ] ] ll : l 。 。 ( e y x ) 。 。 。 ( ) 。 。 ( ) l l I z J l c o s ( ) c 。 s ( ) c 。 s ( ) J
互补滤波器和Kalman滤波器在姿态角测量中研究

t h e c o mp ! e me n t a r y f i l t e r a n d t h e K a l ma n f i l t e r i s a n a l y z e d , a n d t h e i n t r i n s i c me c h a n i s m o f t h e t wo me t h o d s i s a l s o d i s c u s s e d .
c y . T h e p r e t r e a t me n t me t h o d o f t h e o r i g i n a l d a t a o f t h e s e n s o r i s p r o p o s e d , a n d t h e p r o c e s s o f me a s u r i n g t h e a t t i t u d e a n g l e b y
蒋 光峰 谈 英 姿 ( 东南大学 自 动化学院, 江苏 南京 2 1 1 1 8 9 )
摘要 : 姿 态 角在工 程 中应 用极 为 常见 , 对其测 量精 度要 求也越 来越 高。 采 用 ME MS陀螺仪 I G 4 2 0 0和加 速度 计 MMA 7 3 6 1 ,
t wo f us i on met h ods of gy r os c op e an d a c ce l e r o me t er da t a ,t o r e duc e t h e r an do m d r i f t e r r or 。 i m pr o v e t h e me as u r e me n t ac cu r a・
内在 机 理 。 实验 表 明 , 这 两 种 算 法 对 陀 螺仪 随机 漂移 误 差 都 有 很 强的 抑 制 作 用 , 同 时具 有 出 色的 动 态 性 能 。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
单位时间的变化量, 求出这段时间内的变化量, 就可以根据初始量求 系数 。 在我们直立控制中采用 4 ms 更新你的程序循环 。当你想得到 出最终量。例如 : 一辆行驶的汽车 , 如果想要知道汽车每一时间的位 置 ,就可以根据汽车的起始位置再力 t l 上单位时间乘以单位时间的速 0 . 7 5 s 的时间常数, 则滤波器参数为 : 度。
民 蕾科技2 0 1 5 年第8 期
科技 论 坛
Байду номын сангаас
互补滤波在直立控制算法的应用探究
张 哲’ 李 玉 丽
. 吉林建筑大学, 吉林 长春 1 3 0 1 1 8 ) ( 1 . 吉林建筑大学 , 吉林 长春 1 3 0 1 1 8 ; 2
摘 要: 分别利用互补滤波以及梯度下降法将陀螺仪和加速度 计有 效结合 , 完成智能车的直立控制 。 关键词 : 智能车; 自平衡 ; 控制算 法
T 0 . 75 s e c ,
a = 面面 i 。 即, p o s i t i o n + = s p e e d { d t ; 同理, 转化为角度即为: ng a l  ̄ + = g y r o * d t ; 即, a n g l e = ( X ) * ( a n g l e + g y r o * 0 . 0 2 6 2 ) + ( 1 - X ) * ( x _ a c c ) 。 低通滤波器 : 低通滤波器的功能是仅让长时间的变化通过 , 对短 3 结 果与分 析 时间的变化进行滤除。为了实现这个功能, 我的方法是强行使这个变 为了验证方案的可行 陛,设计了双轮平衡摄像头直立小车对互 化在程序中运行并在循环中累 计建立。例如, 当角度 由 0 度, 变化到 7 3 6 1 , 加速度的 2 0度时, 不是阶跃跳变, 而是缓慢 匕 升。 高通滤波器 : 高通滤波器的原 补滤波器的效果进行验证。其中加速度计选用 MMA g , 以及 E N C 一 0 3 陀螺仪 , 测量范围为 ± 3 0 e 固 , s ) , 采用 理和低通滤波器相反的 :高通滤波器仅仅允{ 午 高频率的信 恿 过, 滤 测量范围为 ±6 4 M Hz , 分别进行了静态和动态测试。在我们的实践 中发现 , 通 出低频率的信号 , 主要用来消除漂移。采样周期 : 程序运行一遍的时 频率 6 相 间, 为采样频率的倒数。互补: 由两个滤波器组成的新滤波器, 输出一 过动态调整互补滤波器系数 ,不断调整陀螺仪和加速度计的权重 , 对于单独使用陀螺仪或加速度计能够获得更好的角度跟踪及估计。 个准确的线性估计 , 会输出—个有意义的近似。
例如 :低通滤波器输出为 x ,高通滤波器输出为 y , y = y + ( 1 一 a )
木X:
一
本文论述 了在时间不同情况下陀螺仪和加速度传感器对系统 的 影响 , 应用互补滤波以及梯度下降法两种控制算法 , 对两轮 自 平衡小
.
加可靠。 惯陛元件随着时间的推移, 会产生零飘 , 需要力 : I I 速度计进行补 偿修正。 如果仅做单—使用, 那么结果并不准确, 不能达到直立控制的 要求 。所以必须采取有效的控制算法 , 使两者有效、 科学的结合。 2 互补滤波控制算法 2 . 1 互 补滤波 器 的原 理 图中所示数字滤波器的功能如下 :
,h
移 隋况是 1 度/ 秒, 为了保证陀螺仪的漂移程度不会超过 1 度, 那么 我们则需要— j 、 于 1 s 的时间常数。 但时间常数并非越小越好 , 当时 间常数不断变小 , 加速度传感器的噪声就会被更多的作用于系统。所 以, 我们需要选择—个折 中的方法 , 既能解决陀螺仪的漂移问题 , 又不 会过多的引入加速度计的噪声。 为了得到合适的滤波器系数 , 必须选取合适 的采样率。当程序改 变或者增加浮点运算的时候 , 系统程序执行周期变长 , 采样率也会跟 积分: J f ( x ) d x = F ( b ) 一 F ( a ) , 所谓数值积分, 就是根据时间, 以及 着变小 , J 如果想让系统的时间常数减小 , 则必须重新计算新的滤波器
1 直立控 制的原 理 感器作用强于陀螺仪 , 漂移现象可能在这时候 出现 , 当时间周期小于 自动寻迹的直立智能车主要由直立控制 , 速度控制 , 方向控制三 0 . 5 s 时, 加速度传感器的作用弱于陀螺仪 , 此时加速度传感器的噪声
个方面构成。应用 MMA 7 3 6 1 加速度计和 MP R 5 5 0陀螺仪对直立控 将会被滤除。 假定 滤波器 为 a n g l e =( 0 . 9 8 ( a n g l e + g y r o * 0 . 0 2 6 2 ) +( 0 . 0 2 ) { 制方案进行探究。 小车的直立控制就是需要使小车尽快达到平衡位置。本文采用 ( X a c e ) 。 滤波器在 1 0 0 H Z 采样率条件下,将会得到低通和高通滤波器的 MC 9 S X S 1 2 8 作为中心处理器 , 通过陀螺仪和加速度计融合的值, 得到 小车与平衡位置的偏差 , 并根据偏差改变脉宽调制的 占空比, 使电机 时间 : f = = — 0 . 9 8 * 0 . 0 1 s e e= 0 4 9s e c 驱动输 出不同的电压, 从而改变传速 , 是小车不断靠近平衡位置。 . 2 . 2 互补滤波器系数整定。在—个系统内, 我们通常会根据系统的 在实验中, 我们发现加速度计是利用加速度的原理来测斜调平 , 2 生 先假定—个时间常数 , 然后根据这个时间常数进行系数估计。 在静态或者匀速运动更加准确 , 陀螺仪是利用惯性的原理 , 通过知道 特 f 时间常数可以调整系统响应盼陕慢, 角速率, 可以知道物体的姿态 , 以便对姿态进行控制, 在动态测量时更