Movement-Assisted Sensor Deployment
中国跳伞教练证哪里考?独立跳伞培训要多少钱?

中国跳伞教练证,独立跳伞培训证在哪里考?作为国内跳伞联盟基地的内部人员,我带过数十位跳伞考证学员,非常开心有这么多人热爱跳伞,甚至想学习跳伞成为我们“空中飞人”的一份子。
今天就借着知乎平台,来好好给大家科普下跳伞考证的所有事宜吧!看了很多相关回答,有大神,有学员,但详细程度我这篇应该是全网最有参考的一篇了!大纲目录(全网最详细的跳伞考证攻略):一、独立跳伞考证前一定要知道的背景资料二、国内哪里可以独立跳伞考证三、独立跳伞考证全过程揭秘四、跳伞考证要多少钱?要培训多久?五、跳伞考证相关注意事项我们广东的跳伞培训基地一、独立跳伞考证前一定要知道的背景资料首先我们跳伞考证前,必须要知道这2个概念:USPA与跳伞考证等级。
什么是USPA?为什么要知道它?USPA就是美国跳伞协会,全称United States Parachute Association。
USAP的LOGO因为USPA是全球(注意是全球哦!)跳伞协会中最大型的一个。
它有着最高的权威性、最多的会员人数、以及最广泛的认可度。
因此我们平时说的跳伞考证,一般都是指考由USPA颁发的跳伞证书。
以后当你考上后,你每年的会员费也是交给USPA哦,所以你要先认识下。
那跳伞考证等级又是怎样一回事呢?我们以USPA为例,跳伞考证一共分为4个等级,分别是A证、B证、C证和D证。
其中A证最基础,D证最高级。
想要获得对应的跳伞证说起来也很简单,只要达到对应的跳伞次数即可,比如:A证要求至少在25跳以上、B证要求至少在50跳以上、C证要求至少在200跳以上、D证要求至少在500跳以上。
完成对应的跳数,就可以申请,然后再通过笔试等测试就可以获得对应证书啦。
我猜你这时候又会有新的疑问了:拿到更高级的跳伞证有什么用吗?当然有用!不同的跳伞证意味着你拥有不同的“权限”,比如:拿到A证后,你就可以自己一个人独立跳伞了;拿到B证后,你就可以站在热气球上跳伞;拿到C证后,你就可以担任第三方拍摄教练,或者去申请学习翼装飞行;拿到D证后,你就可以去申请考Tandem教练或者是AFF教练;所以如果你想要不断开启新“权限”,就要努力学习啦!翼装飞行,下面的负责翼,上面的负责装二、国内哪里可以独立跳伞考证因为国外很多地方都能考证,比如美国于斯人的跳伞基地,还有澳大利亚等N多国家,体系众多,所以我这边就不展开说了。
矿井目标定位中移动信标辅助的距离估计新方法

矿井目标定位中移动信标辅助的距离估计新方法胡青松;耿飞;曹灿;张申【摘要】为了降低测距不准对矿井目标定位精度的影响,提出一种移动信标辅助的距离估计方法MBDisEst.该方法由安装有惯导设备或/和激光定位装置的瓦检员或矿车充当移动信标,它们通过与矿山物联网中的其他设备交换信息校准自身坐标.MBDisEst以移动信标和目标节点之间的相对运动和几何约束为基础,利用加权最小二乘法计算目标节点与虚拟信标的距离,可将静止和运动目标的距离估计统一在同一框架.仿真结果表明:MBDisEst的测距精度比TOA的测距精度高,其测距误差随移动信标速度的增大而增大,随移动信标通信半径的增加而减小,基于MBDisEst的定位方法具有较高的定位精度.%To mitigate the affection of the inaccurate distance measurement on the accuracy of the localization system in coal mines, an improved distance estimation method assisted by mobile beacons called MBDisEst was proposed. Some gas inspectors and mining cars equipped with inertial navigation equipment or/and laser positioning devices were selected as mobile anchors, which communicated with other devices for Internet of mine things to calibrate their own coordinates. MBDisEst computed the distances between target nodes and virtual anchors using weighted least square method based on their relative motion and geometrical restriction, and combined static and mobile target scenarios into a unified framework. The simulations show that the distance measurement accuracy of MBDisEst is larger than TOA's, and the measurement error grows up with the speed of mobile anchors and goes down with the communication range of mobile anchors. And thelocalization methods based on distance measurement of MBDisEst has larger accuracy.【期刊名称】《中南大学学报(自然科学版)》【年(卷),期】2017(048)005【总页数】7页(P1227-1233)【关键词】移动信标辅助;矿井目标定位;距离估计;定位精度【作者】胡青松;耿飞;曹灿;张申【作者单位】中国矿业大学信息与控制工程学院,江苏徐州,221008;矿山互联网应用技术国家地方联合工程实验室,江苏徐州,221008;国网北京经济技术研究院徐州勘测设计中心,江苏徐州,221005;中国矿业大学信息与控制工程学院,江苏徐州,221008;矿山互联网应用技术国家地方联合工程实验室,江苏徐州,221008;中国矿业大学信息与控制工程学院,江苏徐州,221008;矿山互联网应用技术国家地方联合工程实验室,江苏徐州,221008【正文语种】中文【中图分类】TD676矿井目标定位系统有助于煤矿企业合理地调配资源,在矿难发生时快速确定受困人员位置[1−2],是煤矿必须配备的安全避险设施之一。
E-车载自组网(VANET)讲解学习

10
③ C2C-CC,“ Car2Car Communication Consortium ”是由6家欧洲汽车制造商(BMW、 DaimlerChrysler、Volkswagen等)组成,目标是为 car2car 通信系统建立一个公开的欧洲标准,不同制 造商的汽车能够相互通信。Car2Car通信系统是采用 基于无线局域网 WLAN技术,确保在欧洲范围内车间 通信的正常运行。
Vehicles can find their neighbors through periodic beacon messages, which also enclose the physical location of the sender.
Vehicles are assumed to be equipped with pre-load digital maps, which provide street-level map and traffic statistics (such as traffic density and vehicle speed on roads at different times of the day)
5
6
专用短距离通信技术—DSRC,是专门为车载 通信开发的技术
7
联合国英语缩写大全

ABBREVIATIONSAAR After Action ReportACAD Abyei Community Action for DevelopmentACF Action Comre la FaimACF-USA Action Comre la Faim (Action against hunger-United States of America)ACORD Agency for Cooperation and Research inDevelopmentACROSS Association of Christian Resource OrganizationsServing SudanACT Alliance Action be Churches TogetherACTED Agency for Technical Cooperation andDevelopmentADM Adventist Development and Relief AgencyAED Academy for Educational DevelopmentAFP Agencies, Funds and ProgramsAGL Above Ground LevelAHA African Humanitarian ActionAMO Area of Maritime OperationAMURT International Ananda Marga Universal Relief Team ANLA Annual Needs and Livelihoods AssessmentAOO Area of OperationAOR Area of ResponsibilityAPC Armored Personnel CarrierARC American Refugee CommitteeARG Aviation Ready GroupASG Assistant Secretary GeneralASMP Alaska Sudan Medical ProjectATC Air Traffic ControlAU African UnionAUPSC African Union Peace and Security CouncilAVR Assisted Voluntary ReturnAVSI Association of Volunteers in International Service AWD acute watery diarrheaAWODA Aweil Window of Opportunities and DevelopmentAgencyBANFMU Bangladesh Force Marine UnitBLOS Beyond Line Of SightBOI Board of InquiryBoSS Bank of South SudanBPIHS Basic Package of Health ServiceBPO Best Practice OfficerBPT Be prepared toBRAC Bangladesh Rural Advancement Committee BSFP Blanket Supplementary Feeding ProgramBZ Buffer ZoneC2 Command and ControlC3 Command, Control and CommunicationC-IED Counter Improvised Explosive DevicesCAD Coordinated Assistance and DevelopmentCAD Civil Affairs DirectorCAFOD Catholic Agency for Overseas Development CAN Community Alert NetworkCAO Chief Administrative OfficerCAP Consolidated Appeal ProcessCAR Central African RepublicCARE Cooperative for Assistance and Relief Everywhere CASEVAC Casualty EvacuationCBHA Community-Based Health CareCBO Chief Budget OfficerCBO Community-Based OrganizationCBRN Chemical, Biological, Radiological and Nuclear CCC Confident Children out of ConflictCCOSS Care for Children and Old Age in South Sudan CDAS Christian Development Action SudanCDF Child Development FoundationCDT Conduct and Discipline TeamCDU Conduct and Discipline UnitCEC Construction Engineer CompanyCERF Central Emergency Response FundCES Central Equatoria StateCEWER Conflict Early Warning Early ResponseCFL Ceasefire LineCFR Case Fatality RateCFSAM Crop and Food Security Assessment Mission CHAP Common Humanitarian Action PlanCHF Common Humanitarian FundCHNBATT Chinese BattalionCIDA Canadian International Development Agency CIMIC Civil-Military CoordinationCIS Commonwealth of Independent StatesCISS Chief Integrated ServicesCITS Communication and Information TechnologySectionCLA Community Liaison AssistantCLJAS Criminal Law and Judicial Advisory ServiceCMB Collection Management BoardCMCC Civil-Military Coordination CentreCMC Civil-Military CoordinationCMD Christian Mission of DevelopmentCMLO Chief Military Liaison OfficerCMO Chief Military ObserverCMOC Civil-Military Operation CentreCMR Cargo Movement RequestCMR Crude Mortality RateCMS Chief of Mission SupportCMT Crisis Management TeamCO Commanding OfficerCoA Course of ActionCOB Company Operating BaseCOE Contingent Owned EquipmentCoH Cessation of HostilitiesCOM CommunicationCOMINT Communication IntelligenceCONOPS Concept of OperationCONPLAN Concept PlanCoP Community of PracticeCoS Chief of StaffCOSV Coordinating Committee for InternationalVoluntary ServiceCP Check PointCPA Comprehensive Peace AgreementCPI Consumer Price IndexCPTM Core Pre-deployment Training ModulesCPU Central Programmer UnitCRSV Conflict Related Sexual ViolenceCSA Chief Security AdvisorCSB County Support BaseCSO Chief Security OfficerCSTO Collective Security Treaty Organization CTSAMM Ceasefire and Transitional Security ArrangementsMonitoring MechanismDAP Dynamic Air PatrolDDR Disarmament, Demobilization and Reintegration DFC Deputy Force CommanderDFP Detention Focal PointDFS Department of Field SupportDMZ Demilitarized zoneDO Designated OfficialDoA Director of AdministrationDOB Deployed Operating BaseDPA Department of Political AffairsDPET Division for Policy, Evaluation and Training DPI Department of Public InformationDPKO Department of Peacekeeping Operations DSR Defense Sector ReformDSR Daily Situation ReportDSRSG Deputy Special Representative of the Secretary-GeneralDSS Department of Safety and SecurityECHA Executive Committee on Humanitarian Affairs ECOWAS Economic Community of West African States ECPS Executive Committee on Peace and Security EES Eastern Equatoria StateELINT Electronic IntelligenceEoAR End of Assignment ReportEOD Explosive Ordnance DisposalEO Electro-OpticERW Explosive Remnants of WarETTBATT Ethiopian BattalionEU European UnionFBFD Field Budget and Finance DivisionFC Force CommanderFGS Force Generation ServiceFMV Full Motion VideoFOB Forward Operational BaseFOL Fuel, Oil and LubricantsFP Force ProtectionFPB Fast Patrol BoatFPD Field Personnel DivisionFPU Formed Police UnitFRAGO Fragmentary OrderFRB Force Reserve BattalionFSA Flight Safety AssuranceFSS Field Support SuitGA General AssemblyGCS Ground Control StationGDT Ground Data TerminalGIS Geographic Information SystemGoSS Government of South SudanGPAA Greater Pibor Administrative AreaGPS Global Positioning SystemHALE High Altitude Long EnduranceDeficiency SyndromeHLS Helicopter Landing SiteHLZ Helicopter Landing ZoneHMEC Horizontal Military Engineer CompanyHOC Humanitarian Operation CentreHoM Head of MissionHoMC Head of Military ComponentHoPC Head of Police ComponentHQ HeadquarterHRD Human Resources DevelopmentHRD Human Rights DefenderHRDDP Human Rights Due Diligence PolicyIAP Integrated Planning and AssessmentIASC Inter-Agency Standing CommitteeIASMAN Inter-Agency Security Management Network IATG International Ammunition Technical Guidelines iaw in accordance withICG Infantry Company GroupICRC International Committee of Red Cross/Crescent ICT Information and Communication Technology ICTD Information, Communication and TechnologyDivisionIDDRS Integrated Disarmament, Demobilization andReintegration StandardIDP Internally Displaced PeopleIED Improvised Explosive DeviceIFF Identification Friend or FoeIGAD Intergovernmental Authority on Development IHL International Humanitarian LawIHRL International Humanitarian Rights LawIMC Inter-Mission CooperationIMINT Imagery IntelligenceIMT Integrated Mission TeamIMTC Integrated Mission Training Centre INDBATT Indian BattalionINGO International Non-Governmental Organization IO International OrganizationiO In OppositionIOC Intensive Orientation CourseIOT Integrated Operational Courseiot in order toIPB Intelligence Preparation of the BattlefieldISACS International Small Arms Control Standards ISF Integrated Strategic FrameworkISS Integrated Support ServiceIT Information TechnologyITF Integrated Task ForceITS Integrated Training Serviceivo in vicinity ofJCSC Justice and Corrections Standing Capacity JLOC Joint Logistic Operation CentreJMAC Joint Mission Analysis CentreJMAT Joint Mission Assessment TeamJOC Joint Operation CentreJTC Joint Technical CommitteeJVMM Joint Verification and Monitoring Mechanism KENBATT Kenyan BattalionLAS League of Arab StatesLAN Local Area NetworkLDP Long Duration PatrolLFE Light Field EngineerLOA Letter Of AssistLoC Lines of CommunicationLOGOPS Logistic OperationsLoS Line of SightLR Leave RequestLRR Leave Return ReportLSD Logistic Support DivisionMACC Mine Action Coordination CentreMALE Medium Altitude Long Endurance MANPADS Man Portable Air Defense SystemsMAR Monthly Attendances RosterMBPO Military Best Practice OfficerMCC Medical Collaboration CommitteeMCDA Military and Civil Defense AssetsMCMS MOU and Claims Management Section MCOS Mission Chief of StaffMCPP Military Component Planning ProcessMCS Mission Capability StudyMCWP Military Component Work Plan MEDEVAC Medical EvacuationMET Mission Essential TaskMILAD Military AdvisorMIO Maritime Interdiction OperationMIP Mission Information PackageMLO Military Liaison OfficerMOB Main Operating BaseMOC Military Operation CentreMONBATT Mongolian BattalionMONUSCO United Nations Organization Stabilization Missionin the Democratic Republic of the CongoMOP Movement Of PersonalMOSS Minimum Operating Security StandardMOU Memorandum Of UnderstandingMOVCON Movement ControlMP Military PoliceMPIO Military Public Information OfficerMPP Military Planning ProcessMPS Military Planning ServiceMRF Mobile Riverine ForceMRM Monitoring and Reporting MechanismMSD Mission Support DivisionMSF Médecins sans frontiers (Doctors without Borders) MTF Maritime Task ForceMTG Maritime Task GroupMTS Misconduct Tracking SystemMVM Monitoring and Verification MechanismMVT Monitoring and Verification TeamNA Not ApplicableNATO North Atlantic Treaty OrganizationNCC National Contingent CommanderNEPBATT Nepalese BattalionNGO Non-Governmental OrganizationNSE National Support ElementNSS National Security ServiceNSTR Nothing Significant To ReportOAS Organization of American StatesOCHA Office of Coordination of Humanitarian Affairs OHCHR Office of the High Commissioner For Human Rights OHRM Office of Human Resources ManagementOIOS Office of Internal Over Sights ServicesOLA Office of Legal AffairsOMA Office of Military AffairsOO Office of OperationsOP Observation PostOPCON Operational ControlOPORD Operational OrderOPSP Office of Peacekeeping Strategic Partnership OPV Off-Shore Patrol VehicleORA Operational Readiness AssuranceORBAT Order of BattleORMS Organizational Resilience Management SystemEuropePBPS Policy and Best Practice SectionPBSO Peacebuilding Support OfficePC Police CommissionerPCTSA Permanent Ceasefire & Transitional SecurityArrangementsPDT Pre-deployment TrainingPDV Pre-deployment VisitPEP Post-Exposure ProphylaxisPET Peer Education TrainingPIO Press and Information OfficerPIP Pre-deployment Information PackagesPIR Priority Information RequirementPKTI Peacekeeping Training InstitutePM Permanent MissionPOC Protection Of CiviliansPoC Point of ContactPOINT Peace Operation IntranetPoW Prisoner of WarPPCE Positive and Proactive Community Engagement PPDB Policy and Practices DatabasePTIP Peacekeeping Tactical Information Preparation QIP Quick Impact ProjectQRF Quick Reaction ForceQRP Quick Response PlanQRT Quick Reaction TeamRBB Result-Based BudgetingRC Resident CoordinatorRO Regional OrganizationROE Rules Of EngagementRPA Remotely Piloted AircraftRPAS Remotely Piloted Aircraft SystemRRP Recovery and Resolution PlanRSO Remote Split OperationRVT Remote Video TerminalRWANBATT Rwandan BattalionSA Situational AwarenessSATCOM Satellite CommunicationSC Security CouncilSCR Security Council ResolutionSDP Short Duration PatrolSEA Sexual Exploitation and AbuseSF Special ForcesSFR Statement of Force RequirementSGB Secretary-General BulletinSGBV Sexual and Gender Based ViolenceSICU Security Information Coordination Unit SIGINT Signal IntelligenceSIOC Security Information Operation CentreSLIP Senior Leaders Induction ProgramSLS Security Level SystemSMG Senior Management GroupSML Senior Mission LeaderSMS Security Management SystemSMT Senior Management TeamSyMT Security Management TeamSO Staff OfficerSOFA Status Of Force AgreementSOI Standard Operating InstructionSoM Scheme of ManoeuvreSOMA Status Of Mission AgreementSOP Standard Operating ProceduresSPC Standing Police CapacitySPCC Strategic Planning and Coordination Cell SPLA Sudanese People’s Liberation ArmySPLM Sudanese People’s Liberation Movement SRM Security Risk ManagementSRSG Special Representative to the Secretary-General SSB State Support BaseSSNPS South Sudanese National Police ServiceSSR Security Sector ReformSTM Standardized Training ModuleSUR Statement of Unit RequirementTACOM Tactical CommandTACON Tactical ControlTAM Technical Assessment MissionTCAS Traffic Alert and Collision Avoidance System TCC Troop Contributing CountryTNA Training Need AssessmentTOB Temporary Operating BaseTOE Table of Organization and EquipmentTOR Terms Of ReferenceTOT Training Of TrainerTTP Tactics, Techniques and ProceduresUA Unmanned AircraftUAS Unmanned Aircraft SystemUN United NationsUNAMID United Nations Hybrid Mission in DarfurUN-CIMIC United Nations Civil-Military CooperationUNCT United Nations Country TeamUNDAF UN Development Assistance GroupUNDG United Nations Development GroupUNDP United Nations Development ProgramUNFPA United Nations Fund for Population Activities UNHCR United Nations High Commissioner for Refugees UNIBAM United Nations Infantry Battalion Manual UNIBAT United Nations Infantry BattalionUNICEF United Nations International Children’s EmergencyFundUNISFA United Nations Interim Security Force in Abyei UNLB United Nations Logistics BaseUNLT United Nations Liaison TeamUNMAS United Nations Mine Action ServiceUNMEM United Nations Military Experts on Mission UNMLO United Nations Military Liaison OfficerUNMO United Nation Military ObserverUNMOT United Nations Military Observer TeamUNOAU United Nations Office to the African Union UNOE United Nations Owned EquipmentUNOWA United Nations Office of West AfricaUNPKO United Nations Peacekeeping Operations UNPOL United Nations PoliceUNSAS United Nations Standby Agreements System UNV United Nations VolunteersUOE United Nations Owned EquipmentUPDF Uganda People's Defense ForcesUXO Un-Exploded OrdnanceVBIED Vehicle Borne Improvised Explosive Device VCCT Voluntary Confidential Counselling and testing VHF Very High FrequencyVTC Video Tele-ConferencingWSR Weekly Situation ReportWES Western Equatoria StateUnited Nations Mission in South Sudan (UNMISS)Current version: 2015-10-21 Abbreviations 01-15 Document locationProduction date: 2015-10-21S:\FHQ-JUBA\21_J5_Planning\ADMIN\J5 ABBREVIATIONS AND TERMS。
支持人工智能在生活中的应用英语作文

支持人工智能在生活中的应用英语作文全文共3篇示例,供读者参考篇1The Role of AI in Our Daily LivesArtificial intelligence, or AI, is no longer just a concept from science fiction novels and movies. It has become an integral part of our daily lives, revolutionizing the way we live, work, and interact with the world around us. As a student, I have witnessed firsthand the numerous ways AI has impacted various aspects of my life, from education to entertainment, and I firmly believe that its applications should be embraced and supported.One of the most significant contributions of AI in my academic journey has been its ability to personalize and enhance the learning experience. AI-powered educational platforms and applications can analyze a student's strengths, weaknesses, and learning styles, tailoring the content and delivery methods accordingly. This personalized approach ensures that each student receives the most effective and efficient learning experience, maximizing their potential for success.Furthermore, AI-assisted tutoring systems and virtual assistants have become invaluable resources for students like myself. These intelligent systems can provide on-demand support, answering questions, clarifying concepts, and offering personalized guidance. They alleviate the burden on teachers, allowing them to focus on more complex aspects of instruction while AI handles routine queries and reinforcement exercises.Beyond academia, AI has also transformed the way we entertain ourselves. Streaming platforms like Netflix and Spotify leverage AI algorithms to analyze our preferences and provide personalized recommendations for movies, TV shows, and music. This not only saves us time and effort in sifting through countless options but also exposes us to new and exciting content that we may have otherwise missed.AI has also made significant strides in the realm of personal assistants. Virtual assistants like Siri, Alexa, and Google Assistant have become indispensable companions in our daily lives. They can handle a wide range of tasks, from setting reminders and managing schedules to controlling smart home devices and providing quick access to information. These AI-powered assistants have streamlined our routines, allowing us to focus on more important tasks while they handle the mundane chores.Moreover, AI has revolutionized the field of healthcare, offering numerous benefits to patients and healthcare professionals alike. AI-powered diagnostic tools can analyze medical images and data with unprecedented accuracy, aiding in early detection and diagnosis of various conditions. Additionally, AI-driven personalized medicine approaches can tailor treatment plans based on an individual's unique genetic and lifestyle factors, increasing the effectiveness of therapies and reducing potential side effects.In the realm of security and safety, AI has proven to be an invaluable asset. Facial recognition and biometric authentication systems powered by AI have enhanced our ability to secure sensitive areas and protect against unauthorized access.AI-driven surveillance systems can detect potential threats and anomalies in real-time, enabling prompt response and prevention of incidents.Environmental sustainability is another area where AI has made significant contributions. AI algorithms can optimize energy consumption in buildings and transportation systems, reducing our carbon footprint and promoting eco-friendly practices. Additionally, AI-powered predictive models can assist in forecasting weather patterns, natural disasters, andenvironmental changes, allowing for better preparedness and mitigation strategies.Despite the numerous benefits and applications of AI, there are valid concerns and ethical considerations that must be addressed. Issues such as privacy, data bias, and the potential displacement of human workers by AI systems remain significant challenges. However, I believe that with responsible development, robust governance frameworks, and ongoing public discourse, we can navigate these challenges and harness the full potential of AI for the betterment of society.In conclusion, artificial intelligence has already become an integral part of our daily lives, offering numerous advantages across various domains, including education, entertainment, healthcare, security, and environmental sustainability. As a student, I have experienced firsthand the transformative power of AI in enhancing my learning experience and streamlining my daily routines. While there are legitimate concerns that need to be addressed, I firmly believe that embracing and supporting the responsible application of AI will pave the way for a more efficient, personalized, and sustainable future. It is our collective responsibility to ensure that AI continues to be developed anddeployed in a manner that prioritizes ethical considerations and benefits humanity as a whole.篇2The Brilliant Future of AI in Our LivesArtificial intelligence (AI) is no longer just a fascinating concept from science fiction novels and movies. It has become an integral part of our daily lives, revolutionizing the way we live, work, and interact with technology. As a student living in this era of rapid technological advancements, I am both excited and intrigued by the potential applications of AI in our society.To begin, let's explore the realm of personal assistants.AI-powered virtual assistants like Apple's Siri, Amazon's Alexa, and Google Assistant have become household names, seamlessly integrating into our homes and routines. With simple voice commands, we can effortlessly set reminders, control smart home devices, search for information, and even engage in casual conversation. The convenience these assistants provide is undeniable, allowing us to multitask and streamline our daily activities with ease.Moving beyond personal assistance, AI has also made significant strides in the field of healthcare. From diseasediagnosis and drug discovery to personalized treatment plans and robotic surgery, AI is transforming the medical industry. Machine learning algorithms can analyze vast amounts of data, identifying patterns and making accurate predictions that aid healthcare professionals in providing better care for patients. Additionally, AI-powered chatbots and virtual assistants are revolutionizing telemedicine, making healthcare more accessible and convenient, especially in remote areas.Education is another sector that stands to benefit greatly from the integration of AI. Adaptive learning platforms powered by AI can tailor educational content to individual students' needs and learning styles, ensuring a personalized and effective learning experience. AI-assisted grading and feedback systems can alleviate the workload on teachers, allowing them to focus on more meaningful interactions with their students. Furthermore, AI-powered virtual tutors and educational assistants can provide round-the-clock support, ensuring that students have access to valuable resources whenever they need them.In the realm of transportation, AI is paving the way for autonomous vehicles. Self-driving cars, powered by advanced AI algorithms, have the potential to revolutionize the way wecommute, increasing safety, reducing traffic congestion, and providing greater accessibility for individuals with disabilities or mobility challenges. While still in development, the prospect of a future where cars can navigate seamlessly without human intervention is both exciting and promising.AI is also playing a crucial role in environmental conservation and sustainability efforts. Machine learning models can analyze vast amounts of data from satellite imagery, sensor networks, and climate models, enabling researchers and policymakers to make informed decisions about resource management, energy efficiency, and environmental protection. AI-powered systems can optimize energy consumption in buildings, predict natural disasters, and even assist in wildlife monitoring and habitat preservation.Despite the numerous benefits and advancements, the integration of AI into our lives is not without its challenges and concerns. Issues such as privacy, data security, job displacement, and ethical considerations must be carefully addressed. As AI systems become more advanced and autonomous, it is crucial to establish clear guidelines and regulations to ensure their responsible development and deployment.Privacy and data security are particularly pressing concerns in the age of AI. As we entrust more of our personal data to AI systems, we must ensure that robust measures are in place to protect our privacy and prevent unauthorized access or misuse of sensitive information. Strict data protection laws and secure data management practices are essential to maintain public trust and confidence in AI technologies.Additionally, the potential impact of AI on employment and job displacement cannot be ignored. While AI is expected to create new job opportunities in fields like AI development, data analysis, and specialized technological roles, there is a risk that certain traditional jobs may become automated or obsolete. It is crucial to address this challenge proactively by investing in workforce retraining programs, promoting lifelong learning, and fostering an environment that encourages skill development and adaptability.Ethical considerations surrounding AI are also of paramount importance. As AI systems become more autonomous and capable of making decisions that impact human lives, we must ensure that they are developed with a strong ethical foundation. Principles such as transparency, accountability, fairness, and respect for human rights should be embedded in the design anddeployment of AI systems. Ongoing dialogue and collaboration among researchers, policymakers, and societal stakeholders are essential to navigate these complex ethical challenges.Despite these concerns, I remain optimistic about the future of AI and its potential to improve our lives in countless ways. With responsible development, robust governance frameworks, and a commitment to ethical principles, we can harness the power of AI while mitigating its risks and ensuring it serves the greater good of humanity.As a student witnessing the rapid advancements in AI, I am excited about the opportunities it presents for personal growth, educational enrichment, and future career prospects. The ability to leverage AI as a tool for knowledge acquisition,problem-solving, and skill development is truly remarkable. By embracing AI while remaining vigilant about its responsible use, we can unlock a future where humans and intelligent machines work in harmony, complementing each other's strengths and pushing the boundaries of what is possible.In conclusion, the integration of AI into our daily lives is an inevitable and exciting journey. While it presents challenges that must be addressed, the potential benefits are vast andfar-reaching. From personal assistants and healthcareadvancements to educational innovations and environmental conservation, AI is poised to revolutionize nearly every aspect of our lives. As students and future leaders, it is our responsibility to approach AI with an open mind, a critical eye, and a commitment to shaping its responsible development and deployment. By doing so, we can harness the power of AI to create a better, more efficient, and more sustainable world for ourselves and future generations.篇3Sure, here's an essay supporting the application of artificial intelligence in our daily lives, written from a student's perspective, at approximately 2000 words in English.The Rise of Artificial Intelligence: Embracing the FutureAs a student living in the 21st century, I can't help but be in awe of the rapid advancements in artificial intelligence (AI) technology. From voice assistants like Siri and Alexa toself-driving cars and intelligent robots, AI is infiltrating every aspect of our lives. While some may view this as a cause for concern, I firmly believe that embracing AI is not only inevitable but also essential for our continued progress and well-being.To begin with, AI has the potential to revolutionize the way we learn and acquire knowledge. Imagine having a virtual tutor that can adapt to your individual learning style, providing personalized lessons and feedback tailored to your strengths and weaknesses. AI-powered educational platforms could analyze a student's performance and recommend the most effective teaching methods, ensuring that no one falls behind. Furthermore, AI could assist teachers in grading assignments and providing detailed feedback, freeing up their time to focus on more meaningful interactions with students.Beyond the realm of education, AI has the capacity to enhance our daily lives in countless ways. Smart home systems powered by AI can automate mundane tasks, such as adjusting the temperature, lighting, and security based on our preferences and habits. AI-driven virtual assistants can help us manage our schedules, set reminders, and even order groceries or make restaurant reservations with a simple voice command. This convenience not only saves us time but also reduces the mental burden of juggling multiple tasks simultaneously.In the healthcare sector, AI has the potential to save lives and improve patient outcomes. Machine learning algorithms can analyze vast amounts of medical data, identifying patterns andmaking accurate diagnoses that may elude human experts.AI-powered diagnostic tools could detect diseases earlier, increasing the chances of successful treatment. Additionally, AI could assist in drug discovery and development, accelerating the process and reducing the astronomical costs associated with bringing new medications to market.The benefits of AI extend far beyond the personal sphere. AI-driven systems can optimize resource allocation and distribution, ensuring that essential goods and services reach those in need more efficiently. In the realm of environmental conservation, AI could monitor and predict patterns of deforestation, pollution, and climate change, enabling more effective strategies to mitigate their impact. Furthermore, AI could play a crucial role in sustainable energy management, optimizing the generation and distribution of renewable energy sources.While the potential benefits of AI are vast, it is understandable that some may harbor concerns about the potential risks and ethical implications. Issues such as job displacement, privacy violations, and the potential for AI systems to perpetuate biases or be misused for nefarious purposes are valid concerns that must be addressed. However, I believe thatwith proper regulation, oversight, and ethical guidelines, we can harness the power of AI while mitigating its potential downsides.It is crucial that we approach the development and implementation of AI with a thoughtful and responsible mindset. We must ensure that AI systems are designed with built-in safeguards to protect individual privacy and prevent misuse. Additionally, efforts must be made to ensure that the benefits of AI are distributed equitably, without exacerbating existing societal inequalities.Moreover, as AI becomes more advanced and capable of performing tasks traditionally reserved for humans, we must prepare for the potential impact on the job market. Rather than resisting this inevitable change, we should focus on reskilling and upskilling workers, equipping them with the necessary skills to thrive in an AI-driven economy. This could involve collaboration between educational institutions, policymakers, and industry leaders to develop comprehensive training programs and ensure a smooth transition.In conclusion, as a student living in this era of rapid technological advancement, I am excited by the prospect of AI playing an increasingly prominent role in our lives. While legitimate concerns exist, I firmly believe that by embracing AIresponsibly and ethically, we can unlock a future of unprecedented convenience, efficiency, and innovation. Rather than fearing AI, we should strive to shape its development in a way that aligns with our values and priorities, ensuring that it serves as a tool to enhance our lives and create a better world for all.。
关于智能辅助驾驶的英语作文

The Evolution and Impact of IntelligentAssisted DrivingIn recent years, the automotive industry has undergone a revolutionary transformation, thanks to the advent of intelligent assisted driving systems. These systems, often referred to as Advanced Driver Assistance Systems (ADAS), are designed to enhance the safety, efficiency, and comfort of driving by leveraging cutting-edge technologies such as sensors, cameras, radars, and artificial intelligence.The core principle behind intelligent assisted driving is to provide drivers with real-time information and support, enabling them to make better decisions and respond more quickly to road conditions. These systems can detect obstacles, predict potential hazards, and even take control of the vehicle in certain situations, significantly reducing the risk of accidents.One of the most significant benefits of intelligent assisted driving is its ability to improve road safety. By monitoring the driver's behavior and the surrounding environment, ADAS can alert the driver to potential dangers and even intervene to prevent collisions. For instance,automatic emergency braking systems can detect pedestrians or other vehicles and apply the brakes automatically if the driver fails to react in time.Apart from safety, intelligent assisted driving also enhances the driving experience. Features like adaptive cruise control can adjust the vehicle's speed based on the traffic conditions, reducing the need for constant manual adjustments. Lane departure warning systems can alert the driver if they stray out of their lane, helping to maintain a stable and safe driving posture.However, the rise of intelligent assisted driving also presents some challenges and ethical dilemmas. One such dilemma is the question of who is responsible when an accident occurs. Should the blame be placed on the driver or the system? This is a complex issue that requirescareful consideration and debate.Another challenge is the need for continuous updates and upgrades to ensure the systems remain up-to-date with the latest technology and road conditions. This requires a significant investment in research and development, as wellas infrastructure to support the deployment and maintenance of these systems.Despite these challenges, the future of intelligent assisted driving looks bright. As technology continues to advance, we can expect even more sophisticated systems that will make driving safer, more efficient, and more enjoyable. With the help of AI and machine learning, these systemswill become increasingly autonomous, able to handle more complex driving situations with minimal human intervention. In conclusion, intelligent assisted driving is a transformative technology that has the potential to revolutionize the automotive industry. By leveraging the latest advancements in sensor technology, artificial intelligence, and machine learning, we can create safer, more efficient, and more enjoyable driving experiences. While there are still challenges to overcome, the benefitsof intelligent assisted driving are too great to ignore,and the future looks bright for this exciting field.**智能辅助驾驶的发展与影响**近年来,随着智能辅助驾驶系统的出现,汽车行业经历了一场革命性的变革。
物联网工程英语

物联网专业英语复习第一部分单词或词组英译中10空,共10分汉语中译英10空,共10分第一单元单词actuator 执行器Cyber-Physical System CPS信息物理融合系统Cyberspace 网络空间device processing power 设备处理能力fibre-based network 基于光纤的网络Global Positioning System GPS 全球定位系统Internet of Things IoT 物联网Machine to Machine M2M 机器对机器nano-technology 纳米技术quick response QR-code reader QR 码阅读器radio frequency identification RFID无线射频识别技术RFID scannerRFID扫描仪Sensor 传感器shrinking thing 微小的物体storage capacity 存储空间tag 标签middleware中间件中间设备paradigm 范例、概念ubiquitous 普遍存在的gateway device 网关设备logistics 物流in the scenario of … 在…背景下from the point view of … 从…角度convergence 收敛、集合pervasive 普遍存在的domotics 家庭自动化e-health 电子医疗in the context 在…方面with reference to 关于,根据第二单元单词3rd-Generation 3G第三代移动通信技术bluetooth蓝牙cloud computing云计算database数据库embedded software嵌入式软件enterprise local area network企业局域网EPC Global一个组织产品电子代码Fibre to the x FTTx光纤入户=Identity authentication身份认证implant microchip植入芯片infrared sensor红外传感器infrared technology红外技术intelligent processing智能处理IPv6一种互联网协议Japanese Ubiquitous ID日本泛在标识Location Based Service LBS基于位置的服务logistics management物流管理serviced-oriented面向服务的Telecommunications Management Network TMN电信管理网络application layer应用层business layer商业服务层perception layer感知层processing layer处理层transport layer传输层ubiquitous computing普适计算Wireless Fidelity WiFi一种无线局域网络技术ZigBee一种低功耗个域网协议deployment调度、部署intervention介入unprecedented空前的refinement精炼、提炼concrete具体的attribute特征、属性conform to符合、遵照e-commerce电子商务assign分配、指定、赋值diverse多种多样的connotation内涵enterprise企业、事业、进取心appropriateness适当、合适immense巨大的、无穷的magnitude大小、量级representative典型的、代表module模块literacy读写能力、文化素养ultra mobile broadband UMB超移动宽带mass大规模的,集中的第三单元chip芯片integrated综合的、集成的precision精度、精确、精确度reliability可靠性sensitive敏感的、易受伤害的semiconductor半导体silicon硅、硅元素thermocouple热电偶hall门厅、走廊、会堂、食堂programmable可编程的biological sensor生物传感器chemical sensor化学传感器electric current电流electrode potential电极电位integrated circuit集成电路sensor/transducer technology传感器技术sensing element敏感元件transforming circuit转换电路overload capacity过载能力physical sensor物理传感器intelligent sensor智能传感器displacement sensor位移传感器angular displacement sensor角位移传感器pressure sensor压力传感器torque sensor扭矩传感器temperature sensor温度传感器quantity量、数量voltage电压pulse脉冲acquisition获取eliminate消灭、消除volume体积breakthrough突破superconductivity超导电性magnetic磁的inferior in在…方面低劣craft工艺、手艺、太空船quantum量子interference干涉antibody抗体antigen抗原immunity免疫inspect检查、视察organism有机体、生物体hepatitis肝炎high polymer高分子聚合物thin film薄膜ceramic陶瓷adsorption吸附hydrone水分子dielectric medium电解质humidity湿度plasma等离子体polystyrene聚苯乙烯intermediary媒介物polarization极化、偏振corrosion腐蚀tele-measure遥测oxidation氧化lithography光刻diffusion扩散deposition沉淀planar process平面工艺anisotropic各项异性evaporation蒸镀sputter film溅射薄膜resonant pressure sensor谐振压力传感器sophisticated富有经验的etch蚀刻diaphragm膜片beam横梁、照射Wheatstone Bridge惠斯通电桥piezo-resistance压阻gauge计量器ion离子petroleum石油lag落后第五单元barcode条码encode编码graphic图形one-dimensional barcode一维码two-dimensional barcode二维码capacity容量disposal处理、安排algorithm算法barcode reader条码阅读器facsimile传真、复写transcript成绩单authenticate认证、鉴定photocopy复印件asymmetric非对称的cryptographic加密的tamper篡改merchandise商品track跟踪personalized个人化的reflectivity反射率recognition识别agency代理commodity商品portable便携式的execute执行impair损害pantry食品柜distinguish区分individual个人的,个别的encrypt把…加密issuing authority发行机关biometric生物识别iris minutiae虹膜特征trigger switch触发开关establish建立dynamic动态的grasp抓住exchange交换retrieve重新获取capture拍摄duplicate复制forge伪造signature签名第六单元synchronous同步的asynchronous异步的barrier障碍物proliferation扩散router路由器restriction限制seismic地震的scenario方案;情节scalability可扩展的spatially空间地topology拓扑latency延迟facilitate促进release发布thermal热的intrusion入侵coordinator协调器node节点surveillance监督base station基站access point接入点,访问点ad hoc无线自组织网络data-link layer数据链路层network topology网络拓扑peer-to-peer点对点power consumption能耗resource constraints资源受限solar panels太阳能电池版plant equipment工厂设备energy efficient高效能end device终端设备Institute of Electrical and Electronics Engineers, IEEE美国电气与电子工程师学会Micro-Electro-Mechanical Systems, MEMS 微机电系统Personal Area Network, PAN个域网Wireless Sensor Network, WSN 无线传感网络缩写词展开完整形式10空,共10分;IoTInternet of Things物联网RFIDRadio Frequency Identification无线射频识别QR-codeQuick Response Code快速响应码GPSGlobal Positioning System全球定位系统CPSCyber Physical System信息物理融合系统M2MMachine to Machine机器对机器HTTPHypertext Transfer Protocol超文本传输协议SOAPSimple Object Access Protocol简单对象访问协议EPCElectronic Product Code电子产品码WLANWireless Local Area Network无线局域网LBSLocal Based Service基于位置的服务GSMGlobal System for Mobile Communications全球移动通信系统DNSDomain Name Server域名服务器HTMLHypertext Makeup Protocol超文本标记语言CPUCentral Processing Unit中央处理器单元EPROMErasable Programmable Read Only Memory可擦除可编程只读存储器UHFUltra High Frequency超高频第二部分完型填空4大题,每题5空,共20分第三部分阅读理解2大题,每题5空,共20分第四部分:句子翻译5题,每题6分,共30分2、5、7、11可能不考,不是作业本上的1、The main strength of the IoT idea is the high impact it will have on severalaspects of everyday-life and behavior of potential users. From the point of view of a private user, the most obvious effects of the IoT introduction will be visible in both working and domestic fields. In this context, domotics, assisted living, e-health, enhanced learning are only a few examples ofpossible application scenarios in which the new paradigm will play a leading role in the near future.物联网理念的主要强大之处在于,它对潜在用户的日常生活和行为的方方面面产生很大影响;从个人用户的角度来看,它最明显的影响就是工作和家庭方面的影响;在这方面,家庭自动化、辅助生活、电子医疗和加强学习只是物联网应用的几个例子,在不久的将来,这种新模式将发挥主导作用;2、Similarly, from the perspective of business users, the most apparent consequences will be equally visible in fields such as, automation and industrial manufacturing, logistics, business/process management, intelligent transportation of people and goods.同样,从企业用户的角度来看,同样会在一些领域产生最显着的影响,如自动化工业制造、物流、业务/流程管理、人员和货物的智能交通;3、In the IoT, "things" are expected to become active participants in business, information and social processes where they are enabled to interact and communicate among themselves and with the environment by exchanging data and information "sensed" about the environment, while reacting autonomously to the "real/physical world" events and influencing it by running processes that trigger actions and create services with or without direct human intervention.在物联网中,“物”有望成为商业、信息和社会进程的积极参与者;通过交换数据和“感受到”环境的信息,它们可以进行彼此之间及与环境之间的互动和通信;与此同时,通过运行触发动作、创造服务过程,不管有没有人为干预,来自主反应和影响“真实/物理世界”的事件; 4、As the Internet of Things is different from Internet and Telecommunications Network, the above two models is not suitable for IoT directly. But they have some similar features in common. So through the technology architecture of the Internet and the logical structure of Telecommunications Management Network and combined with the specific features of the Internet of Things, we established anew architecture of IoT.由于物联网不同于互联网和电信网络,所以这两种模式不能直接适用于物联网;但是它们有一些相似的共同特征;所以凭借互联网的技术架构和电信管理网络的逻辑结构,再结合物联网的具体特征,我们建立了一个新的物联网架构;5、We believe that this architecture would better explain the features and connotation of the Internet of Things. We divided IoT into 5 layers, which are the Business Layer, the Application Layer, the Processing Layer, the Transport Layer and the Perception Layer.我们相信,这种架构将更好地解释物联的内涵和特征;我们将物联网分为5层:业务层,应用层,处理层,传输层和感知层;6、We think the existing 3-layer structure has certain significance to understand technical architecture of the Internet of Things at the initial stage of its development, but it cannot completely explain its structure and the connotation. Just because of this, many scholars have different opinions on the definition and scope of the Internet of Things.我们认为,在物联网发展的初级阶段,现有的三层结构对了解技术架构方面具有重要意义,但是并不能完全解释物联网的结构和内涵;正因为如此,许多学者在物联网的定义和范畴上持不同意见;7、Such micro-silicon sensor is an advanced sensor technology nowadays. Its basic advantage is that the sensitive components' volume is micron sized, which is one-tenths or one-hundredths of that in traditional sensors. Hence it plays an important role in the fields of industrial control, aerospace, biomedicine etc. Another advantage is its high sensitivity which makes minuteness measurement possible. For example, it could serve as blood pressure sensor.像这样的硅微传感器是当今传感器发展的前沿技术,其基本特点是敏感元件体积为微米量级,是传统传感器的几十、几百分之一;在工业控制、航空航天领域、生物医学等方面有重要的作用;另一特点是敏感度高,使得微小量可被测量,可制成血压压力传感器;8、Traditional sensor could not rival integrated sensor in many respects.Integrated sensor is not only a simple sensor but also a chip, in which there are auxiliary components and sensors, with the function of calibration, compensation, self-diagnosis and network communication. It has lower cost to increase the quantity of production. American LUCAS, NOVASENSOR Inc. produces 10,000 integrated blood pressure sensors per week.在很多方面,集成传感器的优势是传统传感器无法竞争的,它不仅仅是一个简单的传感器,更是一个将辅助元件与传感器同时集成在一块的芯片,使之具有标定、补偿、自诊断和网络通信的功能,它可降低成本、增加产量,美国LUCAS、NOVASENSOR公司每星期能生产1万只这种集成血压传感器;9、The technology behind RFID uses inductive coupling to transfer data. Induction occurs when a wire or any other conductor of electricity passes through a magnetic field, generating an electric current in the wire. It is similar to the principal of electromagnetism-that passing an electric current through a coil of wire will generate a magnetic field-only in reverse. An RFID chip has a coil of wire built into it. An electric current jumps between the two coils of wire,signaling data-carrying, short-range radio waves to pass between the two devices. RFID技术利用电感耦合来传输数据;当电线或其它任何导体通过磁场会产生电感,从而在电线中形成电流;这与电磁原理相似,电流通过线圈将形成磁场—只不过是一个相反过程;RFID芯片内部封装有线圈,电流在两个线圈之间传递,携带的数据信号利用短距离无线电波在两个设备之间传输;10、Barcode is the varying width of the black bars and blank, arranged according to the encoding rules for the expression of a set of information graphics identifier. The common barcode is reflectivity big difference between black bars and the white empty arranged in parallel line pattern. Barcodes can be marked goods producers, manufacturers, product name, production date, number of books, mail starting and ending location, category, date and other information.条形码是将由宽度不等的多个黑条和空白,按照一定的编码规则排列,用以表达一组信息的图形标识符;常见的条形码是由反射率相差很大的黑条和白条空排列成的平行线图案;条形码可以标出物品的生产国、制造厂家、产品名称、生产日期、图书分类号、邮件起止地点、类别、日期等许多信息;11、There are three types of ZigBee devices: ZigBee coordinator, ZigBee router, and ZigBee end device. ZigBee coordinator initiates network formation, stores information, and can bridge networks together. ZigBee routers link groups of devices together and provide multi-hop communication across devices. ZigBee end-device consists of the sensors, actuators, and controllers that collects data and communicates only with the router or the coordinator.ZigBee设备有3种类型:ZigBee协调器,ZigBee路由器和ZigBee终端设备;ZigBee协调器负责网路的形成、信息存储和桥接网络;ZigBee路由器将多组设备联系在一起,提供不同设备间多跳式通信;终端设备由传感器、执行器、控制器组成,可以收集数据,只能和路由器或者协调器进行通信;。
云顿三脚架

Vinten c a m e r a s u p p o r t s 2003-4In one of the most advanced mechanical engineering facilities in the world,Vinten design and manufacture the very highest quality camera supports, able to withstand the most rigorous use and toughest conditions. All Vinten products are designed and manufactured in accordance with BS EN ISO 9002. 1994Vinten constantly strive to provide the most comprehensive worldwide Customer Support network. A dedicated team of customer serviceprofessionals ensures that technical advice, training and service backup is always available. Listening and responding is key to Vinten’s success.VintenVinten are renowned for their innovative design of Pan and Tilt heads, Tripods and Pedestals, specialising in award winning designs such as Vision, Vector,Osprey and Quattro. Over many years Vinten have built up an extensive knowledge of film and video production, this combined with longstanding relationships with both customers and camera manufacturers, Vinten are able to continue to make pioneering advances in camera support technology.From fast-moving sports productions and dramatic ENG situations, to the slow and precise movements demanded in documentaries and drama - whatever the application, Vinten continue to develop a solution to meet the challenges and demands faced by producers and camera operators creating unique pictures for broadcast television, video and film.Vinten’s philosophy has always been to design camera support equipment that cameramen want.Working closely with cameramen, producers,directors and professional associations around the world, Vinten listen to their operational issues and build real solutions for them. From lightweight systems to studio pedestals, Vinten technology surpasses the competition providing precise and effortless camera control.1qualityproduct rangedesign & innovationservice and supportThe Vision Ped, Pro-Ped and Ospreypedestals combine perfectly with theVision range of lightweight heads,providing precise control for bothStudio and OB productions using thenew generation of lightweightcameras and lenses.The Vision, Vector and AutoCam ™ranges of camera supports are ideal for capturing fast moving action on the sports field and other demanding OB applications. Precision drag,Perfect Balance and state of the art robotic technology combine to give you complete control, so that you can keep up with the action in any condition.If you use anything from a mini DVcamcorder through to a film camera,the entire Vision range of camerasupports will give you completecontrol and total reliability -regardless of the situation you findyourself in. Combined with the Pozi-Loc tripod or the revolutionary newFibertec tripod, you can now tailoryour system to cover anything fromthe latest breaking news through tothe remotest jungle – you choosefrom a wide range of options.Angular VelocityVision 100 Drag Control Knob10 kg optimised by using10 kg14 kg17 kgV I S I O N L I G H T V100-AP2Soft Case (3340-3)VB100-CP2Soft Case (3340-3)VB100-CP2M Soft Case (3340-3)V100-AP2S VB100-FT2Soft Case (3532-3)VB100-FT2MSoft Case (3532-3)counterbalance range 10 - 33 kg V250-AP2VB250-CP2VB250-CP2M V250-AP2Soffering many of the features found in the larger heads but at a fraction of the price.3770-3 (100 mm bowl version)3774-3 (75 mm bowl version)Two-Stage Pozi-Loc3880-3 Two-Stage EFP Pozi-Loc150 mm bowl3773-3 (100 mm bowl version) 3777-3 (75 mm bowl version)Single-Stage Pozi-Loc3772-3 (100 mm bowl version)3776-3 (75 mm bowl version)Two-Stage Pozi-Loc3881-3 Two-Stage EFP Pozi-Loc150 mm bowlV I S I O N E N G&E FSpeed of Set up and Re-positioningUnlike traditional clamping systems theFibertec clamps work over the entireoverlap increasing rigidity and ensuringsecure clamping at all times.Repositioned to make deploymentquick and simple, both clamps areeasily reached at any position andboth leg sections can bedeployed at the same time.Fibertec has almost 3 times the torsional rigidity of its nearest rivals.Moulded Joints- provide improved strengthPadded shoulder strap - increase carrying comfortSpread-loc - allows all 3 legs to be positioned at the same time and provides increasedstabilityLocking Levers - sit flush to avoid cable snags and dislocate to prevent accidentaldamageLeg Clamps - are easily reached from any position and can be unlocked simultaneously for quickdeploymentChannel leg sections - increase torsionalrigidityIntegral leg catch - safe and convenient transport and storageThe unique channel section and moulded top joint on the Fibertec tripodThe position of the leg clamp leversallows Fibertec to be re-positioned rapidly and easilyThe unique feature on Spread-Loc prevents accidental damageA unique ratchetmechanism provides anaudible warning thatthe spreader is stilllocked, but stillallows you closethe system andmove on.1Controlled by a central lock knob, theSpread-Loc arms are geared to move3363-33497-3EThree low level versions ofthe two-stage ENG and EFPtripods.The Vision Pedestal is designed for lightweight cameras in studios or on location where fast height and repositioning are required.The pedestal’s column design offers a two-stage extended height range and includes a built in pump to counterbalance the camera load for easy height adjustment.Both the column and dolly easily fold in to two for transportation.The studio version includes track locks to enable tricycle steering and has 10cm / 4"wheels. The OB version is supplied with 12.5cm / 5"wheels.The Pro-Ped is aneconomical lightweight pedestal that can be used both for studio and OB applications.A two-stage system, the lower stage is balance assisted to give simple elevation whilst the upper stage provides perfect balance and ‘on shot’movement. A built in pump makes counterbalance simple.For studio use the dolly base is supplied with 12.5cm / 5" wheels with track locks and cableguards. The OB version has 15 cm / 6" wheels.one-stagetwo-stageStudio versionsStudio versionThe is the most versatile of the Osprey range designed to support the latest range of digital, portable and full facility cameras for both studio and OB productions.The two-stage column offers ‘on-shot’ movement from a minimum height ofThe has an exceptional combination of lightness and structural integrity giving maximum stability whilst still allowing the column and dolly base to fold for easy transportation. Optional accessories include a portable hand pump to counterbalance the pneumatic system.The is also available in black.lowest height(66 cm)flexibility with its two-stage column.quartz oneStudio versionS T U D I O P E D E S T A L S29Less user fatiguetotal control with minimum effort leaves cameramen fresher throughout the day and with less risk of strain or injuryTriangular columns -for maximum rigidity and a stableMinimal torsional twist -allowing stable capture of shotsprovides fingertip control for outstanding shot developmentInternal steering tubes -minimising operational noiseand eliminates possibleminimizing operational possible entanglementLarger ground clearance -for easier movement overColumn clamp -Small volume pneumatic system -requires less nitrogen charge and gives the ability to be hand-pumpedLower operating pressure -allowing a safer charging source to be used by both non and trained/qualified Built-in rubber bumper -prevents damage to or by adjacent objectsC A S E S & P A Npan bars3334-3Soft case for Vision 3, 6, 8 + single-stage tripod 3358-3Soft case for Vision 3, 6, 8, 11+ single-stage tripod3219-78Pan Bar & Clamp for Vision 3 & 63219-71Pan Bar & Clamp for Vision 83219-101as above - Black 3219-69Pan Bar & Clamp for Vision 3 & 63219-91as above - Black3219-42Telescopic Pan Bar for Vision 303219-96Telescopic Pan Bar for HD2503219-66Extra short Pan Bar & Clamp for Vector70, 700 & MK53219-93as above - Black3219-67Short Pan Bar & Clamp for Vector 70,700 & MK53219-94as above - Black3219-62Telescopic Pan Bar & Clamp for Vector 70, 700 & MK53219-82as above - Black3372-3Tube for Vision 3, 6, 8, 11, 100 + single-stage tripod 3396-3Tube for Vision 3, 6, 8, 11, 100 + two-stage tripod 3411-3Tube for Vision 250 + EFP tripod 3398-3Tube for EFP tripod 3397-3Case for Vision 250 head 3269-3Case for Vision 30 head 3355-3Case for Vector 70 or 700 head 3119-3Case for MK5 head3339-3Soft case for Vision 8, 11+ single-stage tripod 3340-3Soft case for Vision 3, 6, 8, 11, 100 + two-stage tripod 3341-3Soft case for Vision 3, 6, 8, 11, 100 + two-stage tripod 3532-3Soft case for Fibertec3334-33337-33396-33355-33340-3Soft CasesHard CasesTubesTransit Cases3336-3Hard case for Vision 3, 6, 8, 11 + single-stage tripod 3357-3Hard case for Vision 3, 6, 8, 11, 100 + two-stage tripod 3338-3Hard case for Vision 250 + EFP tripod3330-17150 mm Levelling bowl adaptor with Quickfix ring and 4-bolt flat base.3330-16100 mm Levelling bowl adaptor with Quickfix ring and 4-bolt flat base.Both for use with the Osprey, Pro-Ped,Quartz/Quattro pedestals and HD tripod.3525-900SPBall Base for Vision 250.3525-901SP4-bolt flat base/QUICKFIX for Vision 250.3259-25Ball Base for Vision 30.3259-294-bolt flat base/QUICKFIX for Vision 30.3490-3Heavy Duty Quickfix Adaptor with 4-bolt base. For use with the Pro-Ped, Osprey, Quartz, Quattropedestals and HD tripods. 100 kg max. capacity.3101-3Quickfix ring to fit 4-bolt flat base head.3144-3Quickfix Adaptor with 100 mm ball base.For use with a 100 mm bowl Vision tripod.45 kg max. capacity.3143-3Quickfix Adaptor with 150 mm ball base.For use with a 150 mm bowl Vision tripod.45 kg max. capacity.3328-30Quickfix Levelling Adaptor with 4-bolt flat base.For use with the Pro-Ped, Osprey, Quartz,Quattro pedestals and HD tripod.45 kg max. capacity.U005-15975 mm ball to 100 mm bowl tripod adaptor.3104-34-bolt flat base to 150 mm bowl adaptor.For use with 150 mm bowl Vision tripods.3100-3Quickfix Adaptor with 4-bolt flat base.For use with the Pro-Ped, Osprey, Quartz,Quattro pedestals and HD tripod.45 kg max. capacity.accessoriesThe time taken for set-up and breakdown is wasteful, which is why Vinten have developed their range of Quickfix adaptors.The latest in the range is the HD Quickfix. A lightweight, low profile Quickfix system that can be mounted to a HD tripod or pedestal using the standard four bolt configuration, for rapid head attachment and release.A simple lever operation reduces the time spent during set-up and break down to seconds, enabling the camera operator to spend more time planning the next shot and capturing the action.Constructed entirely from corrosion resistant components, the Quickfix adapter is ideal for OB applications where you’re constantly moving from one location to the next.The Quickfix adaptor incorporates a number of safety features to ensure that the camera system is retained safely and securely throughout the shoot. For example, the locking system will not activate until the head is positioned correctly in the adapter; neither will it release the head until the safety catch is opened.The system itself accepts the industry standard Quickfix profile which is typically machined into more recent products, but for older heads, a permanent screw on ring adaptor is available which attaches to the bottom of the head.Alternative Bases3371-3ENG Quickfit Automatic Adaptor with 3763-11wedge - Grey 3471-3As above Black.Provides a quick release fixing for cameras up to 25 kg. Recommended for Vision 6, 8, 11, 100 & 2503364-900SP Camera Mounting Plate for Vision 8,11,100 and 250pan &tilt heads.3384-11Intermediate Plate for Portable Cameras3391-3Short Wedge PlateFor Vector 70, 700, & MK53330-33Extended Camera Slide Plate complete with 2 x 3⁄8“ screws.3053-3Standard Wedge Plate For Vector 70, 700, & MK53761-3EFP Quickfit Automatic Adaptor with 3761-13wedge - BlackProvides a quick release fixing for cameras up to 45 kg. Recommended for Vision 30 & HD2503449-900SPCamera Mounting Plate for Vision 3 & 6 pan & tilt head(includes camera fixing; 1⁄4“ Pin Adaptor)3407-1AScaffold Clamp with 4-bolt fixing.For mounting directly onto OB scaffolding.3055-3Mitchell Spider Adaptor for Pedestals 3055-3BAs above - Black.3103-3Mitchell Adaptor 4-bolt flat base For use with HD-1 & HD-2 Tripods3724-3Mitchell Centre Screw.Allows a MK5 or Vector pan & tilt head to be mounted on a Mitchell base.3069-3Wedge Plate Extender for MK53368-24Vinten 4-bolt fixing adaptor to fit Skids.3368-24BAs above - Black.3155-38” riser, 4-bolt flat base to 4-bolt flat base. 3155-3BAs above - Black.For use with the Osprey, Pro-Ped,Quartz/Quattro pedestals and HD tripod.3330-32Front box mount assembly for HD250.3219-34Extended Pan Bar Clamp - Grey 3219-105As above - Black.For Vision 8, 11, 100 & 250QUICKFIT ®WedgesCamera Mounting SystemsHead Base FixingsCamera PlatesStudio/OB (Up to 70 kg)Studio/OB (Up to 45 kg)Studio/OB (Up to 35 kg)Portable Camera (Up to 30 kg)Film/HD Camera (Up to 30 kg)Mk 5 (3716-3)Vision 30 (3259-3)Vector 700 - grey (3448-3)Vector 700 - black (3458-3)Vector 70 (3354-3)Vision 250 - grey (3525-3)Vision 250 - black (3465-3)HD 250 (3462-3)Portable Cameras (Approx 30 kg)Vision 6 (3449-3)Vision 100 - grey (3431-3)Vision 100 - black (3466-3)Vision 8 - grey (3441-3)Vision 8 - black (3841-3)Camcorders (Approx 15 kg)Camcorders (Approx 11 kg)Camcorders (Approx 7 kg)Vision 11- grey (3442-3)Vision 11 - black (3842-3)Camcorders (Approx 13 kg)75 mm Ball to 100 mm Bowl AdaptorVision 30 (3259-3)Vision 250 - grey (3525-3)Vision 250 - black (3465-3)Portable Cameras (Approx 35 kg)Sales Offices:Vinten Broadcast Limited Western Way Bury St Edmunds Suffolk IP33 3TB UKTelephone: +44 (0)1284 752121Facsimile: +44 (0)1284 750560Sales Office Fax: +44 (0)1284 757929Vinten Broadcast s.a.r.l.8-10, rue Séjourné94044 Créteil FranceTelephone: 01 45 13 18 75Facsimile: 01 43 77 15 08Vinten GmbH An der Fahrt 8D-55124 Mainz Germany Telephone: (06131) 910 930Facsimile: (06131) 46245Vinten Japan KK 3-75-5 Sendagaya Shibuya-KuTokyo 151-0051 Japan Telephone: (03) 3 478 6017Facsimile: (03) 3 478 6018Vinten Inc.709 Executive Boulevard Valley Cottage, New York USA 10989-2011Telephone: (845) 268 0100Toll Free Sales: 1 888 2 VINTEN Facsimile: (845) 268 0113Vinten Asia Pacific Pte 6 New Industrial Road#02-02 Hoe Huat Industrial building Singapore 536199Telephone: (65) 629 75 776Facsimile: (65) 629 75 778Copyright Vinten 2003VINTEN ®, VISION ®, QUICKFIT ® QUICKFIX ®, AutoCam ™and ImageTracker ™are registered trademarks.QUALITY SYSTEMS APPROVED TO BS EN ISO 9002.1994Certificate No:Q09508Changes in Product SpecificationSpecifications referred to in previous brochures are superseded by this brochure. We reserve the right to alter specifications or change materials where absolutely necessary.All sizes shown throughout this brochure are approximate and colours shown are as as accurate as modern reproduction methods will allow.No liability can be accepted for any variation.Vinten。
VMSENS VM-i三维运动姿态测量系统--说明书(中文版)

VM-i 是VMSENS提供的基于MEMS技术的低成本、高性能三维运动姿态测量系统。
VMSENS VM-i三态测量系统包含三轴陀螺仪、三轴加速度计(即IMU),三轴电子罗盘等辅助运动传感器,通过内耗处理器输出校准过的角速度,加速度,磁数据等,通过基于四元数的传感器数据算法进行运动姿实时输出以四元数、欧拉角等表示的零漂移三维姿态数据。
VMSENS VM-i三维运动姿态测量系统可于航模无人机、机器人、摄像云台、天线云台、地面及水下设备、虚拟现实、人体运动分析等需要高动态三维姿态测量的产品设备中。
特点∙高精度360 度全方位位置姿态输出∙可输出绝对方向(地平/ 地磁方向)∙无需静态水平条件下限制启动∙快速动态响应与长时间稳定性(无漂移,无积累误差)相结合∙三轴加速度、三轴角速度和三轴磁场强度计高度集成9DOF∙全固态微型 MEMS 惯性器件∙快速更新率,多种可编程的数据输出模式(四元数,欧拉角,旋转矩阵等)∙针对低成本方案,提供运动姿态算法,满足系统应用需求∙提供灵活的软件开发的编程接口,针对嵌入式的底层的通信接口以及应用层的DLL动态链接发到多种设备以及应用∙提供完整的软件运行环境,更容易上手应用输出模式:∙三维全姿态数据(四元数 / 欧拉角 / 旋转矩阵)∙三维加速度 / 三维角速度 / 三维地磁场强度软件支持VMSENS ExplorerVMSENS Explorer是一款针对VMSEN三维运动姿态测量系统姿态测量产品的图形化接口的软件,通Explorer可以很轻易的读取,存储和显示实时的姿态数据,并且通过多种可视化的图形界面呈现给系统开发人员。
通过VMSENS Explorer可以很容易的设置VMSENS的姿态测量传感器参数,以及进行磁传感器的软的校准。
VMSENS SDKVMSENS COM-Object API和 DLL API (适用Windows平台)。
COM-Object 组件是VMSENS提供给客户完成复杂的系统开发任务而提供的高级程序开发接口,通过COM-Object组件用户可以重复利用VMSENS的大部分代码,快速的开发属于自己的专属应用程序,和系统设计者可以更加关注您系统的设计,减少代码编写给您带来的烦恼。
BALLUFF传感器选型指南说明书

Inductive SensorsBalluff offers a variety of inductive sensor solutions: standard designs, block styles, extended range, weld field-immune, specialized sensing – whatever the need, there’s a Balluff inductive sensor that will provide optimum service. Balluff sensors are found in machine tool equipment, the plastics industry, textile production machines, woodworking, automotive manufacturing – wherever there is a need to automate. From Mini to Maxi block style sensors from 5 x 5 mm to 80 x 80 mm, and tubular housings from 3 mm to 30 mm sizes, Balluff inductive sensors monitor, control, measure, and automate production sequences with high reliability and freedom from wear. Photoelectric SensorsBalluff photoelectric sensors are designed to provide specific process tracking, position information, and part quality solutions in all areas of the automation process. They are especially suited for applications in robotics, assembly, and material handling. Along with tubular housings both in plastic and metal sized from 5 mm to 30 mm, Balluff also offers a range of sensors in rigid, block-shaped plastic housings. From classic diffuse, retroreflective, and thru-beam types to more specialized versions, the Balluff photoelectric line will handle the toughest applications. Cylinder & Valve SensorsMagnetic field sensors are primarily used for monitoring the piston position on pneumatic cylinders. The magnetic field of a magnet embedded in the piston is detected by the sensor through the cylinder housing wall. Thanks to their non-contact position sen-sing capability, these electronic magnetic field sensors are reliable, wear-free, and are finding ever-wider use. Balluff offers perfect solutions for a variety of typical pneumatic cylinders. Balluff’s universally compatible range of cylinder sensors with their engineered mounting bracket kit concept will fit virtually any cylinder shape or size.Capacitive SensorsCapacitive sensors detect the change in capacitance caused by the approach of an object in their electrical field. These sensors find broad use in sensing metals, plastics, or liquids and are used extensively in applications involving packaging, plastics handling, and liquid level sensing.Remote SystemsSensors are often required to rotate or follow the movement of a machine component or part being manufactured. This often results in repeated twisting and tangling of wiring, resulting in cable wear and ultimately failure. Balluff power remote systems consist of a transmitter and receiver unit that transmits power and sensor information through an air gap. They eliminate wiring failure while providing noise and contactless wear-free operation even in extreme conditions.Connectors/connectorsID SystemsTransducersBalluff Micropulse linear position transducers provide highly accurate and reliable position control signals. Balluff’s non-contact magnetostrictive technology means performance does not degrade over time, as with linear potentiometers.Micropulse transducers are available with a variety of housingstyles and electrical outputs to fit a wide range of applications and are very popular in the lumber industry, plastic injection and blow molding, tire and rubber manufacturing, stamping presses, die casting, and all types of automated machinery where a continuous, absolute position signal is required.AccessoriesA compete range of accessories helps save costs and provides optimum sensor integration in any environment. In addition toprotecting Balluff sensors, our accessory line is designed to permit precise, lasting sensor location positioning while permitting quick sensor change out at any time.Connectivity ProductsA comprehensive line of cables, cordsets, and connection blocks complement our product line, facilitating sensor use in every area of automation. Balluff offers custom application expertise on request.Mechanical SwitchesEngineered for the most demanding switching requirements and harsh environmental conditions, Balluff cam switch systems are still the preferred solution of automatic machinery builders around the world. Key applications include control of automatic machine tools, overtravel limiting, and robot dynamic zone control.Balluff provides a range of RFID systems to track work in progress and provide feedback on in-process testing. Computer-assisted manufacturing, modern warehouse systems, flexible assembly lines, plus logistics and distribution systems benefit from Balluff BIS RFID systems. BIS components are available in plastic or metal housings and plug-in versions to meet any applicationrequirement. Balluff has developed a complete line of easy to use read-only systems that interface directly into a PLC throughdiscrete inputs or an RS-232 interface. These systems offer data reliability and environmental ruggedness not found in bar code systems. Read-only systems are ideal when product data are stored centrally in a control system and referenced by a code contained on RFID tags located on products, parts, or pallets.Miniature, long-rangeinductive proximitysensorsSpecializedphotoelectricsensorsA new level of reliabilityand performance frompneumatic cylinderposition sensorsUltra-reliable RFIDsystems with the latestin connection options Rugged, long-rangeinductive proximitysensorsAccurate and reliablephotoelectricsensorsThe industry standardmultiple mechanicalswitchesUltra-reliable RFIDsystemsRugged, long-rangeinductive proximitysensorsAll types of lasers,true color, and UVsensorsUltra-reliable RFIDsystems with the latest inconnection optionsBalluff MeansIndustry ExpertiseSpecial coatingsprovide weld-fieldimmunity withBalluff's weld-specificproximity sensorsA new level ofreliability and weld-field immunity withpneumatic clampsensorsDynamic zonerestriction usingBalluff multiplemechanical switchesEliminate troublesomeconnection problemswith Balluff's powerremotesIntro/aboutRugged, long-range inductive proximity sensors for machine Long-range lasers for error proofing and position feedbackSteel face and long-range inductive proximity sensorsMiniature tubular andblock style sensors are easily bunkered within the dieReliable detection of plastic parts and pellets with Balluff's capacitive Reliable position feedback with Micropulse magnetoresistive linear Rugged, long-range inductive proximity sensors for machine Long-range lasers for positioning and UV sensors for wood gradingPhotoelectirc/photoelectrics18 mm Diameter18 mm Diameter18 mm Diameter30 mm Diameter18K 18KF/18KW 18M/18E Threaded Combination ThreadedPlasticStraight or Right AngleThreaded Tubular Style Block Style Specialty– Sensing modes include: - 50 m, 60 m Thru-Beam- 9 m, 16 m Polarized Retroreflective - 250 mm Diffuse– Highly visible safe Class I Laser emission – Simple potentiometer adjustment – Straight or right angle versions – M12 connector or cable outBlock Style Photoelectric Sensors8x8x50 mm31x55x13 mm LaserLaser5K 32x20x11 mm 6K 32x20x12 mm5K & 6K 23x44x13 mm 42x29x13 mm20x7.5x10 mmPhotoelectirc/photoelectrics65x55x20 mm90x73x30 mm55x86x26 mm70x90x35 mm85x72.5x32 mm66M 25K 50x50x18 mm 26K 50x50x17 mmTubular Style Block Style SpecialtySpecialty Photoelectric SensorsPlastic or Metal 18 mm Diameter30x20x12 mm 18 mm Tubular 30x20x12 mm 32x20x12 mm 50x50x17 mm 50x50x25 mm 70x90x35 mm 5, 10, 20, 30, 50,80, 120, 180,Photoelectirc/photoelectricsPlastic 2, 4, 5 mm Smooth Tubular, 3, 5, 6 mm 22 mm/22 mm 43 mm/43 mm 42 mm/62 mm36x52x15 mm18 mm, 50x65x10 mm28x69x13 mm 30.7x54.6x13 mm 30.7x67.3x13 mm 30x60x13 mm 30x60x9 mm Tubular Style Block Style Specialty– No alignment necessary – Simple mounting, no hardware requiredBGLAdvanced Slot Sensors ·1-800-543-8390Specialty Photoelectric Sensors50x50x17 mm50x50x25 mm18 mm DiameterNew Specialty Photoelectric Sensors63MAnalog Distance Sensor– 3 channel color sensor with C (Chromaticity) or C+I (Chromaticity and Intensity) functions– RGB value via RS485 offers millions of color combinations – Wide spectrum white light LED emission improves color detection– 3 independent NPN or PNP outputs– RS485 interface used for: - remote set-up - teaching color- changing tolerance and timer settings- chromacity or chromacity and intensity settings– Small laser spot for detecting small objects over large distances– Virtually unaffected by the reflective properties of the object within aparticular sensing range – Background suppression (HGA) is adjustable over the entire working range – Discrete sensing and alarm outputs27KAdvanced Full Color Sensor25Photoelectirc /photoelectrics18 mm Diameter100 mm, 150 mm,300 mm LightGrids40x80 mm, 80x80 mm,120x80 mm Dynamic50x43x15 mm83x58x31 mm18 mm Diameter32x20x12 mmTubularStyleBlockStyleSpecialty- 0 to 10 Vdc analog output– Static outputs can detect movingor stationary targets– Rugged metal housing withstands– M8 connection for。
动作传感器AMl602在步态特征提取中的应用

A 62传感器 有 3种 工 作模 式 , 别是 主 机触 发 模 MI0 分 式, 传感器触发模 式 和 6 H+步 态测量模 式 。本 系统 根据 C 实际需要选择使用 主机触 发模式 来采集 传感器 的数据 , 数
调制方式下 。 3 系统 软件 设 计
本 文 设计 的 步 态 特 征 提 取 系 统 主要 包 含 数 据 采 集 发 送
模块和数据无线接收模块 , 系统整体结构框 图如 图 1所示 。 传感器采集的数据通 过 IC协议传 输给 微处理 器 , 2 经微 处 理器将数据发射 出去。在接 收端 , 微处理 器将 接收到 的数
征提取系统 , 由于其体积小 , 功耗低 , 精度高等特点 , 得到 了
越 来 越 广 泛 的应 用 。
A I0 M 62动作 传感器来 采集步态 时的加速度信息 , 无需外 接 R C滤波 电路 , 无需外接 存储器 , 数据 以无线传输 的方式 传
输到P C机 上 进 行 数 据 的 处 理 。通 过 分 析 步 态 过 程 中三 轴
中三轴 向的加速度信号和俯仰角 以及倾斜角的方法能够有
18 4
效 地 提取 和分 析测 试 者 的步 态 特 征 。 1 系 统 总 体 方 案 设 计
传 感 器 与 微 系 统
第 3 卷 l
发模块来完 成数据 的收发 。通过 T 提供 的 S a R S do I m r Ft i t u 软件来进行发 送 与接 收寄 存器 的配 置 , 使其 工作 在 G S FK
Qih a g a 6 04, hn ) n u n d o06 0 C ia
肌肉运动

引入肌电
根据Yu与Brenner的研究 ATP使肌肉收缩的原理是说,在ATP的作用下,使肌肉细胞的电位发生改变, 并刺激肌球蛋白使它的形状发生改变。从而产生肌肉的一系列运动。 所以从这个意义上说,人也是电动的。
人在完全放松的状态下,肌肉仍富有弹性,说明某些肌肉仍处于工作状态
产品开发中引入——肌肉疲劳 例如:桌子 椅子 鼠标 键盘
肌肉整合运动模型
肌肉运动的原理
概念: 微丝滑行学说:肌肉收缩是由于肌动蛋ቤተ መጻሕፍቲ ባይዱ微丝(细丝)在肌球蛋 白微丝(粗丝)之上滑行所致。在整个收缩的过程之中,肌球蛋 白微丝和肌动蛋白微丝本身的长度则没有改变。
实质
当肌肉收缩时,若肌动蛋白微丝向内滑行,使到Z线被拖拉向肌节中央而导致肌 肉缩短了,这便称作向心收缩(亦称作同心收缩,concentric contraction)。例 如,进行引体向上(chin-up)动作时,当二头肌(biceps)产生张力(收缩) 并缩短,把身体向上提升时,就是正在进行向心收缩。反过来说,在引体向上的 下降阶段,肌动蛋白微丝向外滑行,使到肌节在受控制的情况下延长并回复至原 来的长度时,就是正在进行离心收缩(eccentric contraction)。还有一种情况, 就是肌动蛋白微丝在肌肉收缩时并未有滑动,而且仍然保留在原来位置(例如: 进行引体向上时,只把身体挂在横杆上),这便称作等长收缩(isometric contraction)。
目前,这个研究团队通过Oculus Rift头盔,打造一套系统来模拟拳击游 戏所产生的各种“力”,提高VR沉浸感。不过,这将会面临一个问题, 如果想要打造绝对的沉浸感,需要全身被包裹,毕竟在拳击运动中,不 仅仅是拳头在挥舞。 对此,其中之一的研究成员Patrick Baudisch表示,Impacto不会是特 别大的设备,也只会覆盖关键部位,而且将来也不会太昂贵。和我们想 到的一样,Impacto 也不只是被运用于拳击游戏,还有更多的应用场景。
Apple OS Deployment Guide for the Enterprise说明书

Apple OS Deployment Guidefor the EnterpriseSo your organization is about to deploy Mac, iPhone, iPad and/or Apple TV to your users and you’re not sure where to start? That’s where the Apple management experts can help. Since 2002, Jamf has helped organizations across the globe ensure their Apple programs are a success.This guide highlights the steps needed to deploy your entire Apple ecosystem successfully across your organization using Jamf Pro and Apple Business Manager.Sign up for Apple Business Manager1. »With macOS 10.11, iOS 9 and tvOS 12 and later, you can choose to deploy apps to either users’Apple IDs or directly to a device. Choose whether or not to use Apple IDs based on your app deployment preference.»Device-based assignments are strongly recommended for all deployments. This removes all prompts for end users and streamlines app deployments.»Additionally, employees may use personal Apple IDs for iCloud, iMessage, FaceTime andmore. Apps will be assigned directly to devices and are not linked to the employee’s Apple ID.»User-based assignments require that end users accept app assignments by providingtheir Apple ID and password. User-based assignments allow apps to be re-downloaded on multiple devices owned by an employee and is required for the assignment of books.Consider your Apple ID strategy2. »Enroll your organization at https:// .»Get your Apple Customer Number or DEP Reseller ID — this is required for Apple BusinessManager.»The first Managed Apple ID created will be your Apple Business Manager Administrator account. Your organization can have up to five Administrators in Apple Business Manager.»Create additional Managed Apple ID accounts to delegate access for other roles, such as People Manager, Device Manager, Content Manager and Staff. Each user’s Managed Apple IDcan hold one or more of these roles.Ensure stable Wi-Fi and networking»Strong Wi-Fi and modern networking are critical for a successful deployment. Make sure yourorganization has enough bandwidth and wireless routers to handle all of your new devices.»Ensure that your devices can properly access the sites and ports required for mobile device management (MDM) and app deployment. See https:///en-us/HT202944 for detailed requirements.3.Link Jamf Pro to Apple Business Manager4.»Create one or more MDM sververs within the Devices section of Apple Business Manager.»You will need to download a public key from Jamf Pro to create this MDM server. You will then be able to download a server token from the Apple Business Manager to add to Jamf Pro.»Once linked, you can assign new devices to be managed by Jamf Pro with serial numbers, order numbers, or even platform type within Apple Business Manager.What is Jamf Pro?Jamf Pro is a comprehensive management systemfor Apple macOS computers, iOS and tvOS devices.With Jamf Pro, IT admins proactively manage theentire lifecycle of all Apple devices.Build your configuration profilesConfigure Jamf Pro for initial set up options1.2.Configuration profiles are XML files that act like a recipe for your device settings and are deployed via Jamf Pro.»Build your profile ingredients in Jamf Pro with settings such as: Wi-Fi, email and VPN.»Consider building different profiles for different groups of users in your organization.»The PreStage Enrollment settings in Jamf Pro lets you define how the Apple device behavesout of the box.»From here, select options to customize the enrollment experience and define device configurations.»For additional security and customization, you can require end users to authenticate using a directory services account (like Active Directory). Alternatively, you can assign users todevices after enrollment using Jamf Pro.Policies for macOSSupervision for iOSPolicies are a more advanced method to configure macOS by talking directly to the operating system (OS) and executive commands such as:»»Managing software updates, setting up printers,and enabling FileVault disk encryption. Both profiles and policies are built and deployed within Jamf Pro.Supervision allows for a higher level ofmanagement, including locking the MDM profile and managing Activation Lock.»»Supervision can be done automatically via AppleBusiness Manager and configured in Jamf Pro (see next step).»»Alternatively, you can manually supervise an iPadvia Apple Configurator over USB.For MacBuilding a plan for handing out new Mac computers is crucial for a successful deployment.345Zero-Touch122.IT builds policies and profiles in Jamf Pro. New Mac computers are sent directly to end users.End users unbox and set up the local account.Enrollment package is automatically applied over the air via automated MDM enrollment through Apple Business Manager.Policies and profiles are applied over the air for settings and software.IT-Assisted1.13245IT builds policies and profiles in Jamf Pro.IT receives a new Mac, unboxes, sets up local account.Enrollment package is added on top of the standard macOS install.Additional policies and profiles are applied over the air for settings and software.New Mac is handed to the end user.1.Consider two different levels of IT involvement when building your plan:For iPhone, iPad and Apple TVMake a plan for distributing your devices to users.1.IT-Driven1.123IT unboxes devices.IT walks through the Setup Assistant.IT enrolls the device.IT downloads apps for the user.4User-Driven3.123User unboxes devices.Sets up, and auto enrolls device via Apple Business Manager.IT enrolls the device.User downloads apps via Self Service.IT-Assisted2.12IT helps the user set up and enroll the device.User downloads apps via Self Service.Consider 3 different levels of IT involvement for handling new devices:2.Enroll your devicesDevice management begins with enrolling a device. Choose from one of these methods:»Automated MDM enrollment with Apple Business Manager (recommended).»User-initiated enrollment via web page or email invitation.»Apple Configurator enrollment via USB.3.Turn on devices»iPads and iPhones in Apple Business Manager will automatically enroll with Jamf Pro.»Configuration profiles, apps and books will automatically install from Jamf Pro.»Self Service will appear.Purchase Apps and Books4Purchase Apps and Books in volume with Apple Business Manager1.2.»Buy licenses (recommended): License the content to your users. Your organization retainsownership of apps (but not books), allowing you to revoke and reassign them as needed.Assign Apps and BooksAssign to devices (device-based app assignment)»Apps will be deployed directly to devices. No invitations necessary.»Device-based apps require macOS 10.11 or higher devices for Mac and iOS 9 or later for iPhone and iPad.»Scope apps and other content directly to devices within Jamf Pro.»Assigned content will automatically download to the device. Or your content can be available through Self Service.Assign to users (user-based app assignment)»Apps will be deployed to and owned by end users.»User-based Apps and Books requires macOS 10.9 or higher devices for Mac and iOS 7 or later for iPhone and iPad.»Create an Apps and Books invitation email within Jamf Pro and scope to desired users.»Users receive an email with a registration link and are guided through the process of downloading their content. Or via a push notification or prompt with Self Service.There are two ways to assign apps. The following steps outline both device-based Apps and Books (recommended) and user-based (Apple ID required) Apps and Books app deployment.Purchase Apps and Books4Build packages for additional apps (Mac Only)3. 4.»Many other apps are available as packages outside of the App Store. Jamf also created Composer to simplify package creation for any application.»Composer is part of Jamf Pro and lets you create custom packages (.pkg/.dmg).»Since Composer uses a snapshot method for package building, you can deploy apps withcustomizations. For example, the default homepage on Chrome, or the default font on Word. Consider your app deployment strategy»Use the Jamf Pro Self Service app for user-initiated app install.»Silently push apps to your users or devices.Manage5Enable your end users, give control to IT1.2. »Regularly update Self Service with new content to encourage usage.»Leverage Push Notifications to push important messages directly to devices. »Customize Jamf Pro with Smart Groups and advanced reporting.Manage the lifecycle of your devices with reporting»View and sort your entire fleet’s warranty status in a single location. »Use this data to determine when you should upgrade or replace your hardware.With an Apple Self-Servicing Account you can integrate your Global Service Exchange (GSX) Account with Jamf Pro to retrieve warranty and purchasing data directly from Apple’s global inventory database.3.Maintain the Mac by managing software patches Join Jamf Nation for ideas on how to improve your deployment »Keep your Mac computers up to date with OS and application patches.»Build custom software packages with a simple point-and-click interface.»Sign packages for frictionless deployment without security warnings.»With automated patch management software notifications in Jamf Pro, you’ll always know when third-party software patches are available so you can take action. »Use dynamic inventory data in Jamf Pro to determine which Mac needs patches. »Jamf Nation is a knowledgeable community of Jamf Pro users helping each other.»This is a free service, open to all, whether you are a Jamf customer or not. »Learn from other organizations about their Mac deployment and share best practices.4.。
Pasco Motion Sensor II Manual

Motion Sensor ManualThis manual describes the Motion Sensor hardware and the locally written software that interfaces to it.HardwareOur detectors are the Motion Sensor II (Pasco CI-6742). Calling this device a Motion Sensor is a bit misleading: it measures the distance of an object from the detector, not the motion of the object. The device was originally invented by the Polaroid Corporation as a range finder for cameras.Principle of OperationBehind the brass screen is a transducer that generates an ultrasonic sound pulse. The same transducer generates a signal when the echo of the pulse is received. By measuring the time Δt between the generation of the pulse and receiving the echo, if the speed of sound is v then the distance d between the sensor and the object is:2tv d Δ=The sensor is connected to a Data Acquisition Board (DAQ), which then connects via a USB cable to a computer. A program on the computer, written in LabVIEW, controls the sensor and reads the distance through the DAQ. The DAQ is housed in a locally designed and fabricated Data Acquisition Device.The sensor can not measure distances less than 15 cm. The maximum distance itcan measure is about 8 m.The SensorThe figure shows some details of thesensor. We will go though those details.Narrow/Std SwitchThis controls the width of the ultrasonicsound wave. The Std setting is a widebeam, and the Narrow setting restrictsthe sound wave to about 15 degrees. Onsome sensors instead of being labeledStd and Narrow the switch has twoicons: one is of a cart (the narrowposition) and the other is of a person(the Std setting).Typically this will be set to the Narrowposition. This reduces the chance of thesensor registering a false target, andalso reduces the sensitivity to noise.For poorly reflecting targets, you mayneed to set the switch to Std.Target Indicator LEDThis flashes when the sensor has acquired a target.Positioning DialThis allows the orientation of the sensor to be rotated.Note: when operating in Std mode (a wide sound wave), you may need to rotate the sensor so that the angle the sound wave makes with the horizontal is 5 or 10 degrees. This is to keep the wave from bouncing off a tabletop etc.Phone PlugsThese are plugged into the corresponding terminals on the Data Acquisition Device. On the left side of the Device are two pairs of terminals labeled Digital Channels; each pair has one labeled with a yellow circle and the other with a black circle. The corresponding yellow and black plugs from the sensor are plugged into pair labeled 0, yellow to yellow and black to black..Mounting on a Dynamics TrackOften you will wish to mount the sensor on a dynamics track. The figure shows how to do this.SoftwareIn research laboratories the standard software for data acquisition and process control is LabVIEW from National Instruments. The software for the Motion Sensor was locally developed using LabVIEW. Such programs are called virtual instruments or more usually just vi’s.To start the software, double click on the Motion Sensor icon on the desktop.It is an excellent idea of have a look at the various parts of the window that will open, to get a rough idea of what information and controls are available to you.Here is a screen shot of the upper left part of the window:The right-facing arrow, circled in the screen shot, starts the virtual instrument. There is a button labeled Quit (not shown) in the upper-right corner of the window which stops the instrument.You may have already noticed that there are a number of tabs across the top of the vi. We will describe them.Collect TabThis is the tab that gives controls to start and stop the sensor and collect data. Here is a screen shot of part of the contents of the tab:The Start Detector button startsthe sensor. When clicked thebutton will show a green light.You may be able to hear the sensorclicking. When the detectorreceives an echo the green LED onthe front of the sensor will flash.Clicking on the Start Detectorbutton again stops the detector; thegreen light on the button goes out.To collect distance-time data, clickon the Collect Data button. Youmay only do this after you havestarted the detector. Datacollection will continue until youclick on Collect Data again.Sometimes the hardware/software does not set up communication with thesensor. In this case the green LED on the sensor will not flash.1.Stop the detector by clicking on the Start Detector button again.2.Unplug the sensor from the Data Acquisition Device and plug it back in.3.Re-start the detector by clicking on the Start Detector button.When you are collecting data, the distance data is displayed in the graph which is not shown in the above figure.When you stop collecting data, if you start collecting data again the old data is deleted.Analyze TabAfter distance data has been collected, this tab slows you to do some analysis and trimming of the data. Here is a screen shot of the upper part of the tab:On the left is a graph of the distance data: this is the distance of the object from the sensor. This is the same data that you saw in the graph in the Collect tab. Note that the horizontal axis is the sample number.On the upper right, the displacement data are shown, with the horizontal axis now being the time in seconds. Recall that if two successive distance measurements are r i and r i+1, then the displacement is r i+1 - r i.Note that errors in the values of the distance have been estimated and are displayed in the time-displacement plot. Details of how those errors have been estimated appear in theAppendix to this Guide. In a future release of the software you will be able to substitute for the values of the errors in the distance values.Below the distance-time plot is a plot of velocity versus time, calculated from the displacement-time data. In a future release of the software, this plot will also have error bars.Below the velocity-time plot and not shown is a plot of acceleration versus time, calculated from the velocity-time data. It too will have error bars soon.In the raw distance-sample plot on the left of the Analyze tab there are two cursors, represented by vertical dashed yellow bars. Initially they are on the far left and right of the plot. You may grab these with the mouse to select only the data between them. These “trimmed” values are what are then used in the three graphs to the right of the window. By default the scales of the graphs are set to show all of the data. Sometimes an extraneous datapoint means that this scaling is not what you wish. To change the scaling of any plot:•Double click on the maximum or minimum value displayed on the axis whose scale you wish to change.•Enter the new value and press Enter on the keyboard.File TabThis tab allows you to save the distance-time data, including errors in the distance, to a file. When you click on the Save button you will have the opportunity to change the default title of the dataset. If you “trimmed” the data in the Analyze tab it is that trimmed data that are saved.Setup/Calibrate TabHere is a portion of the Setup/Calibrate tab:You may adjust the numberof samples per second beingcollected either1. With the round knob,or2. Using the arrowkeys, or3. Typing in the valuethat you wish in thetext window.By default, the software assumes the speed of sound is 344 m /s . This is usually a good value. However, you may calibrate the speed of sound by using the part of the tab that is not shown in the figure.AppendixHere we discuss how we arrived at the estimated error in the values of the measured distance. It assumes some knowledge of the standard deviation , which we only briefly review.We repeat the measurement of some physical quantity x say N times. From the data we calculate an estimated mean of the values est x . Then the spread in the values is expressed by the standard deviation estimated σest , which is calculated from:1)(2−−=∑N x x est i est σWe can call the numerator of the expression inside the square root the sum of the squares of the residuals , i.e. the sum of the square of the difference between each individual data point and the estimated mean.We can call the denominator of the expression inside the square root the number of degrees of freedom , which is just the number of data points minus that fact that we have used the data to calculate the estimated mean.It is reasonable to associate this estimated standard deviation with the uncertainty in each individual datapoint x i .When we fit data to some polynomial, good fitters will tell us what the sum of the squares of the residual for the fit are. Just as for the standard deviation, this is the sum of the square of the difference between the value of the dependent variable of each data point and the value given by the fitter. Some fitters will also tell us the number of degrees of freedom of the fit: it is just the number of data points minus the number of terms in the polynomial to which we are fitting the data. Then the equivalent of a standard deviation for a fit is:freedonof rees squares the of sum degThis can reasonably be taken to be the uncertainty in the values of the dependent variable.We used the Motion Sensor hardware and software to collect some data for a cart on a track. We then used the PolynomialFit program to fit the data to the appropriatepolynomial. Then from the sum of the squares of the residuals and the degrees of freedom of the fit we could calculate the estimated error, and code that value in the Motion Sensor vi.This guide was written by David M. Harrison, Dept. of Physics, Univ. of Toronto in September 2008. Many of the figures in the Hardware section are cut and pasted from the Pasco Instruction Sheet 012-08624ALast revision: October 3, 2008The Motion Sensor vi was written by David Rogerson, Dept. of Physics, Univ. of Toronto in the Summer/Fall of 2008 with input from David M. Harrison and Larry Avaramidis.。
Magnetostrictive Sensor Series MSB 安装指南说明书

INSTALLATION GUIDEMagnetostrictive Sensor Series MSBFor more information please see the data sheet at /products/magnetostrictive-transducers/WayCon Positionsmesstechnik GmbH would like to thank you for the trust you have placed in us and our products. This manual will make you familiar with the installation and operation of our magnetostrictive sensors. Please read this manual carefully before initial operation!Unpacking and checking:Carefully lift the device out of the box by grabbing the housing. After unpacking the device, check it for any visible damage as a result of rough handling during the shipment. Check the delivery for completeness. If necessary consult the transportation company, or contact WayCon directly.The cylinder head (in which the threaded hole will be drilled for inserting the transducer) must be made of non-magnetic material. The residual magnetization caused by drilling the threaded hole must be less than4 Gauss.MSB...F1INSTALLATION GUIDEMagnetostrictive Sensor Series MSBFor more information please see the data sheet at /products/magnetostrictive-transducers/MSB (2)measurement rangeThread M18x1,5The sealing surface must be free fromscratches longitudinal or spiral.Ro 1.6 μm for sealing with NON-pulsating pressureRo 0.8 μm for seals with pulsating pressureSuggested o-ring:PARKER 6-349 15,4x2,1Material: Viton 90° Shore-AMixes: PARKER N552-90TECHNICAL DRAWING MSB...F2MSB...F1Detail XINSTALLATION GUIDEMagnetostrictive Sensor Series MSBFor more information please see the data sheet at /products/magnetostrictive-transducers/ELECTRICAL CONNECTION MSB...N/K/E-F1MSB...N-F1MSB...K-F1MSB...E-F1Cable 0.1...10.1 V 0.1...5.1 V yellow Output GND Output GND Output GND pink Pow er Supply +Pow er Supply +Pow er Supply +brow n Pow er Supply GNDPow er Supply GNDPow er Supply GNDblue4...20 mA - The transducer must be installed in a grounded metallic cylinder.- The braiding of the shielded transducer connection cable must be connected to the case of the female connector so that the shielding is connected to the transducer case.- The cable shielding on PLC side must be isolated.- If the transducer is installed in a cylinder isolated from the ground, the cable shielding on PLC side must be grounded.- The transducer must be installed away from sources of magnetic fields, both static and 50 Hz (electric motors, solenoids, etc.).- The 24 VDC feed must be dedicated to the transducers or must be drawn directly from the power terminals and as near as possible.- The sensors must be powered with non-distributed networks and always at lengths of less than 30 m. - The magnetic cursor must be installed by placing a non-magnetic spacer (made of brass, aluminium, stainless steel or plastic) between the piston surface and the cursor.MSBStandard Installation (recommended)ELECTRICAL CONNECTION MSB...S-F1DIGITAL OUTPUT MSB...S-F1Series MSB... -S magnetostrictive transducers supply digital outputs in START/STOP format with RS422 differential serial transmission. The transducer requests an initialisation pulse that launches sampling. The following pulses are transmitted on the outputs:Start: the initialisation pulse retransmittedStop: the pulse corresponding to the position of each magnet.The time between the Start pulse and the subsequent Stop pulses is proportional to the position of each magnet according to the “magnetostrictive wave propagation speed” constant, equal to about 2900 m/sec.P = Time * 2900 m/secThe correct propagation speed for each product is shown on the product label.Resolution in terms of metres is linked to the resolution used to measure time1 μSec (1 MHz ) ==> 2.9 mm10 nSec (100 MHz ) ==> 0.029 mm1 nSec (1 GHz ) ==> 2.9 μmThe measurement reference is the leading edge of the pulse. Optimum width of the interrogation pulse is 3 μsec, but the transducer works correctly for times from 1.5 to 5 μsec.MSB...S-F1CableOutput +greyOutput -greenInput +yellowInput -pinkPow er Supply +brow nPow er Supply GND blueIn case of cable length shortening,after cutting the cable take care ofsoldering and insulating the greenand grey wires togetherINSTALLATION GUIDEMagnetostrictive Sensor Series MSBFor more information please see the data sheet at /products/magnetostrictive-transducers/ELEKTRISCHER ANSCHLUSS CANopen ELECTRICAL CONNECTION MSB...F2Connector output M12MSB...F2MSB...N-F2MSB...K-F2MSB...E-F2PIN 0.1...10.1 V 0.1...5.1 V 1Output GND Output GND Output GND 2DO NOT CONNECT DO NOT CONNECT DO NOT CONNECT 3Pow er Supply GND Pow er Supply GND Pow er Supply GND 4Pow er Supply +Pow er Supply +Pow er Supply +54...20 mAMAGNETIC CURSOROrder Code A B C DPCUR02232.813.523.9-PCUR02332.813.523.911.0PCUR02425.413.5--PCUR026 f or liquids52.412.044.0-PCUR027 f or liquids52.415.044.0-Note:PCUR026 and PCUR027 are supplied with kit PKIT036 for floating cursor for liquids.Material PCUR026, PCUR027: stainless steel AISI 316Please order magnetic cursorseparately (not included in thedelivery of the sensor).PCUR022PCUR023PCUR024PCUR026/027TECHNICAL DATAElectrical stroke (C.E.)[mm]Measurement rangeLinearity< ±0.02 (min. ±0.06 mm)MSB...F1 total length L[mm]Measurement range + 131.5 (excluding cable)MSB...F2 total length L[mm]Measurement range + 140.3 (excluding connector) Repeatability[mm]< 0.01Hy steresis< ±0.005 %Sampling time MR 50 to 1000: 1 / MR 1100 to 2000: 1.5 / MR > 2000: 2MR: Measurement range[msec]DECLARATION OF EC-CONFORMITYACCESSORIES MSB...F2K5P2M-S-M12K5P5M-S-M12K5P10M-S-M12K5P2M-SW-M12K5P5M-SW-M12K5P10M-SW-M12Connection cable analog output, 5-pole, shielded 2 m, connector, straight 5 m, connector, straight 10 m, connector, straight 2 m, connector, angular 5 m, connector, angular 10 m, connector, angularPIN Cable colour K5P..1brow n 2w hite 3blue 4black 5greyWayCon Positionsmesstechnik GmbH Mehlbeerenstrasse 482024 Taufkirchen / GermanyThis is to certify that the products Classification Magnetostrictive Sensors SeriesMSBfulfill the current request of the following EC-directives:EMV-directive 2004/108/EU (until April 19th , 2016)2014/30/EU (from April 20th , 2016)applied harmonized standards:EN 61000-6-2:2005, EN 61000-6-4:2007, EN 61326-1:2006The declaration of conformity loses its validity if the product is misused or modified without proper authorisation.Taufkirchen, 24.02.2016Andreas Täger, CEO。
哈里伯顿仪器和服务明细
Bi-modal AcousTic Sensor (BAT™)
Bioassay Technical Support
BMR 100-Barrel Batch-Mixer Trailer
BondCem™ Cements
BondSeal™ Cement
Borate Crosslinked Fluids
AssetJournal™ Project Documentation Tool
AssetObserver™ real-time field surveillance
AssetPlanner™ Field Development Planning Software
AssetSolver™ real-time field management
CleanStream® Service
CleanWave™ Water Treatment System
CoalStim® Service
Cobra Frac® Service
CobraJet Frac® Service
CobraMax® H Fracturing Service
CobraMax® V Fracturing Service
Constant Volume Extractor (CVE )
Constrictor® Annular Barrier Tool
Control Line Clamps and Protectors
Conventional Full Closure System
Core Freezing
Core Gamma Logger
AutoLatch™ and Release Perforating Gun Connector
CS43B-O 推类紧紧耦合器说明书

The CS43B-O is a push-type clutch in combination with I-shift gearboxes while it for manual gearboxes works as a drag-type clutch. The clutch has a single friction disc that is 430 mm in diameter.The clutch is disengaged when the release bearing drags or pushes the centre of the diaphragm spring outward. This design makes the clutch easy to use and makes the engagement action light and progressive when driving in close quarters. Single discs are particularly suitable for driving with few starts. The purpose of the clutch is to transfer power from the engine to the gear-box, but it also absorbs variations in torque from the engine.For the drag-type clutch there is an inspection hole in the cover which simplifies monitoring disc wear. For the push-type clutch the disc wear is measured (not for 16-litres engines) by a position sensor on the air cylinderfor disengagement.There is a damper located at the centre of the clutch disc that consists of a number of torsinal springs attatched in such a way that the centre of the disk can twist slightly in relation to the linings. The springs absorb any jolts, which protects components in the driveline and increases their service life.The CS43B-O has friction linings made of a heat-resistant, asbestos-free and lead-free material. The pressure plates and flywheel have great heat ab-sorbing capacity and the disc linings can withstand high temperatures. This contributes to excellent durability and low maintenance costs.A single disc is best suited for driving with few •starts.A large friction area offers good durability, which •means good profitability.The friction disc has asbestos-free and lead-free •linings and cushioning pads that distribute pres-sure evenly over the entire surface.The clutch consists of few parts, which results in •low weight and low wear and maintenance.Disc wear for the push-type clutch is measured •(not for 16-litres engines) by position sensors on the air cylinder for disengagement. Disc wear for the drag-type clutch is controlled via an inspection hole.The push-type clutch has a concentric air cylinder •for disengagement.Push-type clutch gives a short installation length.•The clutch fork for the drag-type clutch has a •spherical bearing in the clutch casing, which enables the fork to cope with uneven loads and to ensure good disengagement.A drag-type clutch requires low disengagement •forces and provides good manoeuvrability. Designation ..................................................................CS43B-O Type, with I-shift gearboxes .............Single, push-type clutch Type, with manual gearboxes ...........Single, drag-type clutch Type of disc ......................................................................Dry disc No. of discs . (1)Disc diameter ..................................................................430 mm Disc damper’s diameter ................................................254 mm Total friction surface of the disc ...............................1842 cm2 Weight including disc .........................................................51 kg SPECIFICATIONFeatures And benefitsDrag-type clutchPush-type clutch3b8213456Easy-to-use, single disc clutchCS43B-O consists of a friction disc (1), pressure plate (2) and a release bearing (3a) for manual gearboxes or an air cylinder (3b) for the I-shift gearboxes. The disc has a hub with inner splines. The hub is located on the gearbox’s input shaft, which has cor-responding outer splines. This enables the disc to slide along the shaft. This design offers good manoeuvrability.Smooth clutch action for high driver efficiencyThe drag-type clutch is operated with the help of a compressed-air servo to make gear shifting easy for the driver. The servo is run by a hudraulic system where the master cylinder is located near the clutch pedal in the cab. The cylinder and fluid reservoir are accessible through the service hatch at the front of the truck. The function of the servo in the system is to convert the hydraulic pres-sure from the master cylinder, with the help of compressed air, into mechanical movement. The compressed air-assisted hydraulics means that low pressure on the clutch pedal results in smooth engagement/disengagement of the clutch. This contributes to high driver efficiency.The push-type clutch is operated with the help of a compressed air cylinder that is fitted in the clutch cover. The compressed-air is supplied through valves to the compressed-air cylinder. The valves are opened until required level on the air-compressed piston is reached. The level on the piston is defined with the help of a position sensor that is fitted on the compressed-air cylinder. The valves are designed to achieve a smooth engagement/disengagement.Disc linings with long service lifeThe disc consists of a steel plate with friction linings riveted to both sides. The linings are made of heat-resistant, asbestos-free and lead-free material that can withstand the high temperatures that are generated when the disc slips during starts.Cushioning pads are located between the linings and the steel plate, which distribute pressure evenly over the entire friction surface, resulting in a long service life.A damper in the form of torsional springs, is located around the centre of the disc. Its purpose is to absorb any jolts or vibrations. There is also a smaller damper that eliminates idling noise from the gearbox.Smooth operationIn the engaged position, the diaphragm spring, a “fan spring” (1), presses the pressure plate (2) which in turn engages the clutch. When the clutch is engaged, power from the engines is transferred from the flywheel (3) via the friction disc (4) through the hub (5) to the gearbox’s input shaft (6). When the clutch pedal is depressed (drag-type), force is transferred to a fork (7) that drags the release bearing (8) rearward towards the gearbox.For a push-type clutch air is sent to the clutch cylinder, force is transferred to the release bearing (8) that is pushed forward away from the gearbox. The release bearing drags/pushes the centre of the diaphragm spring, removing the pressure on the disc. The disc stops rotating, while the flywheel and the pressure plate rotate at the same speed as the engine. This means that the gearbox receives no power from the engine and the gearbox input shaft stops rotating if the gearbox is in the neutral position.Disc engaged (drag-type clutch)Disc engaged (push-type clutch)Disc disengaged (drag-type clutch)Disc disengaged (push-type clutch)。
KSR Kuebler 水位传感器说明书
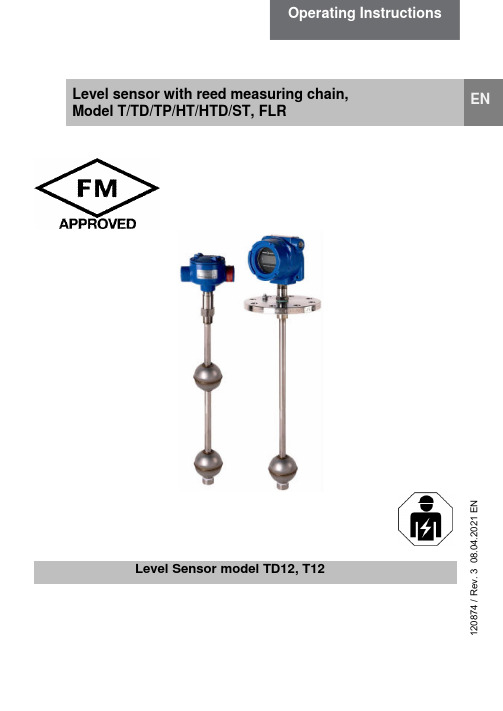
Operating InstructionsLevel sensor with reed measuring chain, Model T/TD/TP/HT/HTD/ST, FLR ENLevel Sensor model TD12, T12120874 / R e v . 3 08.04.2021 E NEN Operating Instructions, Model T/TD/TP/HT/HTD/ST, FLR © 2016 WIKA Alexander Wiegand SE & Co. KGAll rights reserved. / Alle Rechte vorbehalten.WIKA® and KSR® are registered trademarks in various countries.WIKA® and KSR® sind geschützte Marken in verschiedenen Ländern.Prior to starting any work, read the operating instructions!Keep for later use!Vor Beginn aller Arbeiten Betriebsanleitung lesen!Zum späteren Gebrauch aufbewahren!KSR Kuebler Niveau-Messtechnik GmbH Heinrich-Kuebler-Platz 169439 Zwingenberg am Neckar • Germany Tel. +49 6263/87-0Fax +49 6263/87-99******************** Gayesco-WIKA USA229 Beltway Green Boulevard Pasadena, Texas 77503 Tel. +1 713 475 0022Fax +1 713 475 0011********************2 KSR KUEBLER Operating Instructions – T/TD/TP/HT/HTD/ST, FLRContents1. General information 42. Design and function 53. Safety 64. Transport, packaging and storage 135. Commissioning, operation 136. Faults 197. Maintenance and cleaning 208. Dismounting, return and disposal 229. Specifications 23 KSR KUEBLER Operating Instructions – T/TD/TP/HT/HTD/ST, FLR 31. General information▪The magnetic Level sensors described in the operating instructions have been designed and manufactured using state-of-the-art technology. All components are subject to stringent quality and environmental criteria during production.Our management systems are certified to ISO 9001.▪These operating instructions contain important information on handling the in-strument. Working safely requires that all safety instructions and work instruc-tions are observed.▪Observe the relevant local accident prevention regulations and general safety re gulations for the instrument’s range of use.▪The operating instructions are part of the product and must be kept in the im-mediate vicinity of the instrument and readily accessible to skilled personnel at any time. Pass the operating instructions on to the next operator or owner of the instrument.▪Skilled personnel must have carefully read and understood the operating in-structions prior to beginning any work.▪The general terms and conditions contained in the sales documentation shall apply.▪Subject to technical modifications.▪Further information:Internet address: / Relevant data sheet: FLR / LM 20.024 KSR KUEBLER Operating Instructions – T/TD/TP/HT/HTD/ST, FLR2. Design and function2.1 Functional descriptionLevel sensors work on the float principle with magnetic transmission. A permanent magnet built into the float triggers, with its magnetic field, the resistance measur-ing chain built into the guide tube. The entire assembly corresponds to a 3-wire potentiometer circuit. The float changes its height with the level of the medium it is monitoring. The measured resistance signal is proportional to the level. The measurement voltage is very finely-stepped due to the contact separation of the resistance measuring chain and is thus virtually continuous.1 Connection housing2 Cable bushing3 Mounting thread4 Gasket5 Guide tube6 Float7 Teflon washer8 Float stop2.2 Scope of deliveryCross-check scope of delivery with delivery note.KSR KUEBLER Operating Instructions – T/TD/TP/HT/HTD/ST, FLR 56KSR KUEBLER Operating Instructions – T/TD/TP/HT/HTD/ST, FLR3. Safety3.1 SymbolsDANGER!... indicates an immediately hazardous situation which might result in death or severe injuries if it is not avoided.WARNING!... indicates an potentially hazardous situation which might result in death or severe injuries if it is not avoided.CAUTION!... indicates an potentially hazardous situation which might result in light or minor injuries or property or environmental damages if it is not avoided.Installation, electrotechnical expertise!For the installation particular electrotechnical expertise is required.Installation, mechanical expertise!For the installation particular mechanical expertise is required.Information... highlights useful tips and recommendations and infor-mation for efficient and fault-free operation.3.2 Proper intended useLevel sensors are solely intended for monitoring the liquid level of fluids. The area of use is based on the technical performance limits and materi-als.The fluids must not be contaminated nor contain coarse particles nor tend to crystallize. It must be ensured that the magnetic switch materi-als that come into contact with the media are sufficiently resistant to themonitored medium. Not suitable for dispersion, abrasive fluids, highly viscous media and paints.▪Compliance with the usage conditions specified in the operating instruc-tions is required.▪Do not operate the unit in direct proximity of ferro-magnetic environ-ments (distance min. 50mm).▪Do not operate the unit in direct proximity of strong electromagnetic fields or in direct proximity of facilities that can be impacted by magnetic fields (distance min. 1m).▪The level sensors must not be exposed to heavy mechanical strain (im-pact, bending, vibration).▪Compliance with the relevant safety regulations for the use is required. ▪Compliance with the technical specifications in these operating instruc-tions is required. Improper use or operation of the unit outside the tech-nical specifications requires immediate shut-down and inspection by an authorized KSR or WIKA service technician.Claims of any kind due to improper use are excluded.When working on containers, there is a risk of poisoningor suffocation. Work may only be performed using suitablepersonal safety equipment (e.g. respiratory protection,protective clothing, etc.).An explosive atmosphere may develop in a container.Measures must be taken to prevent sparking. Work insuch areas must be done by qualified personnel in ac-cordance with the relevant safety regulations and guide-lines.KSR KUEBLER Operating Instructions – T/TD/TP/HT/HTD/ST, FLR 73.3 Improper useAny use that exceeds the technical performance thresholds or that is in-compatible with the materials is considered improper use.Injury due to improper useImproper use of the unit can result in hazardous situationsand injuries.Do not modify the unit without authorizationAny use beyond the proper intended use or any other use is considered improper use.Do not use this unit in safety or emergency off equipment.3.4 Responsibility of the operatorThe unit is used in the industrial sector. The operator is therefore subject to statutory obligations with respect to occupational safety.Compliance with the safety instructions in these operating instructions and the applicable safety, accident prevention and environmental protection regulations for the area of use of the unit is required.In order to safely work on the unit, the operator must ensure▪the operating personnel is regularly trained in all matters pertaining to occupational safety, first aid and environmental conservation and is fa-miliar with the operating instructions and, in particular, the safety in-structions contained therein▪the unit is suitable for the application in accordance with the proper in-tended use (check for improper use).After check, improper use is excluded.8 KSR KUEBLER Operating Instructions – T/TD/TP/HT/HTD/ST, FLR3.5 Personnel qualificationRisk of injury due to insufficient qualificationsImproper use can result in significant personal injury andproperty damages.The activities described in these operating instructionsmay only be performed by specialist technicians withthe following qualifications.Specialist personnelThe specialist personnel authorized by the operator is capable of execut-ing the described work and autonomously detect potential hazards due their technical training, knowledge of measuring and control technology and their experience and knowledge of country-specific regulations, appli-cable standards and guidelines.3.6 Personal safety equipmentThe personal safety equipment serves to protect the technicians against hazards that might impact the safety or health while working. When exe-cuting the various tasks on and with the unit, the technicians must wear personal safety equipment.Comply with warning signs posted in the work area regarding per-sonal safety equipment!The required personal safety equipment must be provided by the operator.KSR KUEBLER Operating Instructions – T/TD/TP/HT/HTD/ST, FLR 94. Transport, packaging and storage4.1 TransportCheck the magnetic Level sensor for any damage that may have been caused by transport. Obvious damage must be reported immediately.Damage due to improper transportWith improper transport, a high level of damage to prop-erty can occur.▪Observe the symbols on the packaging.▪Handle packed goods with care4.2 Transport and storageDo not remove packaging until just before commissioning.5. Commissioning, operation▪Observe all instructions given on the shipment packaging for removing the transportation safety devices.▪Remove the magnetic Level sensor carefully from the packaging!▪When unpacking, check all components for any external damage.10 KSR KUEBLER Operating Instructions – T/TD/TP/HT/HTD/ST, FLR5.1 Functional checkPrior to installation, a functional test of the level sensor can be carried out with a resistance measuring instrument and manual movement of the float. The following table describes the measurements and the expected meas-ured values for the movement of the float, starting from the float stop in the direction of the tank opening.WARNING!Ensure that the functional check does not start any unin-tended processes.Functional tests must only be carried out with equipmentthat is approved for use in hazardous area. Tests must beconducted by qualified personnel in accordance with therelevant safety regulations and guidelines.5.2 Mounting preparationsEnsure that the sealing faces of the vessel or the level sensor are clean and do not show any mechanical damage.5.3 Mounting▪Observe the torque values of screws specified in pipefitting work.▪In the selection of the mounting material (seals, bolts, washers and nuts), take the process conditions into account. The suitability of the sealing must be specified with regard to the medium and its vapours. In addition, ensure it has corresponding corrosion resistance.▪Mount the level sensor either via mounting thread (3) or mounting flange (not illustrated).▪The guide tube (5) should not be inclined more than a maximum of 30° to the vertical.▪If the geometry of the float (6) does not fit through the process connec-tion, the float must be removed before mounting.▪Before removal, mark the position of the float stops with a waterproof pen▪Mark the mounting position of the floats (e.g. "Up")▪After the level sensor has been mounted, the float should be re-at-tached within the inside of the tank (pay attention to the mounting posi-tion!).▪Float stops (8) must then be re-attached at the marked points.5.4 Electrical connection▪The electrical connection must only be made by qualified skilled per-sonnel.▪Wire the level sensor in accordance with the connection diagram of the electrical output (see product label). The connection terminals are ap-propriately marked.▪Seal the cable gland at the connection housing.▪Install a pour-seal (conduit seal) fitting within 18 inches of the housing to prevent water from entering the housing and for compliance with the National Electrical Code.▪Transmitters with integral electronics (puck and/or display) must be connected in a series loop with the readout or data acquisition device and the power supply. Shielded cable must be used for noise immunity and for Intrinsically Safe applications an agency approved safety barrier must be installed. A ground wire must be provided and connected to the ground block inside the housing.▪To connect a transmitter with a built-in digital display, unscrew and re-move the housing cover and carefully remove the plastic label fromaround the display by grasping each side and pulling upwards. Remove the digital display by carefully pulling up on two diagonal sides of the display. The indicator is held in place by two banana plugs which plug into the baseboard where the 4 to 20 mA puck is mounted. Field wiring connections are made to a two point, compression type, terminal block located on the baseboard (see Fig. 2 for Explosion Proof or drawing 095-3201-001 Pg. 1 for Intrinsically Safe applications). Attach a ground wire directly to the ground screw inside the housing.▪To connect a transmitter without a built-in display, unscrew and remove the housing cover. Field wiring connections are made directly to the puck (see Fig 3 for Explosion Proof, drawing 095-3201-001 Pg. 2 for single puck Intrinsically Safe applications, or drawing 095-3201-001 Pg.4 for dual puck Intrinsically Safe applications). Attach a ground wire di-rectly to the ground screw inside the housing.WARNING!Malfunctions through voltage spikes due to running cables together with mains connection leads or due to large cable lengths.This can lead to a malfunction in the plant and thus lead to injury to personnel or damage to equipment. ▪ Use shielded connection leads▪ Ground connection leads at one endAlways observe the mounting and operating instructions of accessories when commissioning them.PCB layout and componentsWiring for transmitters with integral displayWiring for transmitters without integral display6. FaultsThe following table contains the most frequent causes offaults and the necessary countermeasures.FaultsLevel sensor cannot be mounted at the planned place on the vessel Process connection ofthe magnetic Level sen-sor does not match theprocess connection ofthe vessel.Modification of the vesselReturn to the factoryProcess connection atthe vessel defectiveRework the thread or re-place the screwed cou-plingMounting thread at themagnetic Level sensordefectiveReturn to the factoryNo signal, non-linear or undefined signal Electrical connection in-correctSee chapter 5.4 “Electricalconnection”. Check as-signment with the aid ofthe connection diagram. Measuring chain defec-tiveReturn to the factoryHead-mounted transmit-ter defectiveReturn to the factoryHead-mounted transmit-ter adjusted incorrectlyReturn to the factoryCAUTION!Physical injuries and damage to property and the environmentIf faults cannot be eliminated by means of the listedmeasures, the instrument must be taken out of operation immediately.▪ Ensure that there is no longer any pressure present and protect against being put into operation accidentally.▪ Contact the manufacturer.▪ If a return is needed, please follow the instructions given in chapter 8.2 “Return”.7. Maintenance and cleaning7.1 MaintenanceWhen used properly, the level sensors work maintenance-free. They must be subjected to visual inspection within the context of regular mainte-nance, however, and included in the vessel pressure test.DANGER!Work on vessels involves the danger of intoxication and suffocation. No work is allowed to be carried out unless by taking suitable personal protective measures (e.g. res-piratory protection apparatus, protective outfit etc.).Repairs must only be carried out by the manufacturer.Perfect functioning of the level sensors can only be guar-anteed when original accessories and spare parts are used.7.2 CleaningCAUTION!Physical injuries and damage to property and the en-vironmentImproper cleaning may lead to physical injuries and dam-age to property and the environment. Residual media in the dismounted instrument can result in a risk to persons, the environment and equipment.▪ Rinse or clean the removed instrument.▪ Sufficient precautionary measures must be taken.1. Prior to cleaning the unit, properly disconnect it from the process and the power supply.2. Carefully clean the unit with a damp cloth.3. Do not let electrical connections come into contact with moisture!CAUTION!Damage to propertyImproper cleaning may lead to damage to the instrument! ▪ Do not use any aggressive cleaning agents.▪ Do not use any pointed and hard objects for cleaning.8. Dismounting, return and disposalWARNING!Physical injuries and damage to property and the envi-ronment through residual mediaResidual media in the dismounted instrument can result in arisk to persons, the environment and equipment.Wash or clean the dismounted instrument, in order to protect persons and the environment from exposure to residual media.8.1 DismountingOnly disconnect the measuring instrument once the system has been de-pressurised and the power disconnected!8.2 ReturnWash or clean the dismounted magnetic Level sensor before returning it, in order to protect personnel and the environment from exposure to residual media.Information on returns can be found under the heading “Service” on our local website.8.3 DisposalIncorrect disposal can put the environment at risk.Dispose of instrument components and packaging materials in an environ-mentally compatible way and in accordance with the country-specific waste disposal regulations.9. SpecificationsModelsT12 Reed level sensor with guide tube 12 mmT14 Reed level sensor with guide tube 14 mmT18 Reed level sensor with guide tube 18 mmT48 Reed level sensor with guide tube 48 mmTD14 Reed level sensor with guide tube 14 mm, dual outputTD18 Reed level sensor with guide tube 18 mm, dual outputTD48 Reed level sensor with guide tube 48 mm, dual outputTP16 Reed level sensor with guide tube 16 mm, plastic design TP20 Reed level sensor with guide tube 20 mm, plastic design HT12 Reed level sensor with guide tube 12 mm,high temperature designHT14 Reed level sensor with guide tube 14 mm,high temperature designHT18 Reed level sensor with guide tube 18 mm,high temperature designHTD14 Reed level sensor with guide tube 14 mm, dual output, high temperature designHTD18 Reed level sensor with guide tube 18 mm, dual output, high temperature designST14 Reed level sensor with guide tube 14 mm, sanitary design ST18 Reed level sensor with guide tube 18 mm, sanitary design FLR-SBF Reed level sensor with guide tube 12, 14 or 18 mmMarkingT12T14T18T48FLR-SBF XPDIPNIXP / I / 1 / BCD / T6 Ta = 60°C,DIP / II,III / 1 / EFG / T6 Ta = 60°C,NI / I / 2 / ABCD / T4 Ta = 60°CType 4, 4XTD14 TD18 TD48 XPDIPNIXP / I / 1 / BCD / T6 Ta = 60°C,DIP / II,III / 1 / EFG / T6 Ta = 60°C,NI / I / 2 / ABCD / T4 Ta = 60°CType 4, 4XTP16 TP20 NI NI / I / 2 / ABCD / T4 Ta = 60°C Type 4, 4XHT12 HT14 HT18 XPDIPNIXP / I / 1 / BCD / T6 Ta = 60°C,DIP / II,III / 1 / EFG / T6 Ta = 60°C,NI / I / 2 / ABCD / T4 Ta = 60°CType 4, 4XHTD14 HTD18 XPDIPNIXP / I / 1 / BCD / T6 Ta = 60°C,DIP / II,III / 1 / EFG / T6 Ta = 60°C,NI / I / 2 / ABCD / T4 Ta = 60°CType 4, 4XST14 ST18 XPDIPNIXP / I / 1 / BCD / T6 Ta = 60°C,DIP / II,III / 1 / EFG / T6 Ta = 60°C,NI / I / 2 / ABCD / T4 Ta = 60°CType 4, 4X*) Ratings (FM-approved for the United States of America)XP: Explosionproof for Class I, Division 1, Groups B, C and DDIP: Dust-ignitionproof for Class II/III, Division 1, Groups E, F and G NI: Nonincendive for Class I, Division 2 Groups A, B, C and D hazard-ous (classified) locations, indoors and outdoors (Type 4, 4X)Type code T..For further specifications see data sheet FLR and LM 20.02.Type code FLR(1) (2) (3) (4) Type: - - -KSR KUEBLER Operating Instructions – T/TD/TP/HT/HTD/ST, FLR 31KSR Kuebler subsidiaries worldwide can be found online at . WIKA subsidiaries worldwide can be found online at .Manufacturer contact hergestellt von Sales contact Vertrieb durchKSR Kuebler Niveau-Messtechnik GmbH Heinrich-Kuebler-Platz 169439 Zwingenberg am Neckar • Germany Tel. +49 6263/87-0Fax +49 6263/87-99******************** WIKA Alexander Wiegand SE & Co. KG Alexander-Wiegand-Straße 3063911 Klingenberg • GermanyTel. +49 9372 132-0Fax +49 9372 132-406************www.wika.de32 KSR KUEBLER Operating Instructions – T/TD/TP/HT/HTD/ST, FLR。
Deployment of seismic sensor

专利名称:Deployment of seismic sensor发明人:Eivind Berg,Johan Fredrik Näs,ThorePersson,Sven Magnc Storesund申请号:US11084277申请日:20050318公开号:US07675821B2公开日:20100309专利内容由知识产权出版社提供专利附图:摘要:An arrangement for the deployment of seismic sensor units, such as sensor nodes (), on the seabed includes a frame structure that is adapted to carry a container ()for containment of a data registration unit and additional auxiliary equipment for thesensor node. The arrangement has supports () that can rest against the seabed, and an attachment means () for a lifting hook, for raising and lowering by means of a crane. There is a holder () for the sensor node () that can be positioned on the seabed and which is connected to the container through a signal cable (). A releasable attachment means () holds the sensor node () in a downwardly extending position with respect to the supports (). The attachment means () is located with a horizontal distance from the container (). A latch mechanism () for the attachment means () is adapted to release the sensor node ().申请人:Eivind Berg,Johan Fredrik Näs,Thore Persson,Sven Magnc Storesund地址:Trondheim NO,Trondheim NO,Kolnes NO,Haugesund NO国籍:NO,NO,NO,NO代理机构:Emerson, Thomson & Bennett代理人:Timothy D. Bennett, Esq.更多信息请下载全文后查看。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Movement-Assisted Sensor Deployment Guiling Wang,Student Member,IEEE,Guohong Cao,Member,IEEE,andThomas Porta,Fellow,IEEEAbstract—Adequate coverage is very important for sensor networks to fulfill the issued sensing tasks.In many working environments, it is necessary to make use of mobile sensors,which can move to the correct places to provide the required coverage.In this paper,we study the problem of placing mobile sensors to get high coverage.Based on Voronoi diagrams,we design two sets of distributed protocols for controlling the movement of sensors,one favoring communication and one favoring movement.In each set of protocols, we use Voronoi diagrams to detect coverage holes and use one of three algorithms to calculate the target locations of sensors if holes exist.Simulation results show the effectiveness of our protocols and give insight on choosing protocols and calculation algorithms under different application requirements and working conditions.Index Terms—Mobile sensor networks,sensor coverage,distributed algorithm.æ1I NTRODUCTIONW IRELESS sensor networks can greatly enhance our capability to monitor and control the physical environment.Sensor networks are revolutionizing the traditional methods of data collection,bridging the gap between the physical world and the virtual information world[11],[15],[24],[28].Sensor nodes must be deployed appropriately to reach an adequate coverage level for the successful completion of the issued sensing tasks[5],[21].In many potential working environments,such as remote harsh fields,disaster areas,and toxic urban regions,sensor deployment cannot be performed manually.To scatter sensors by aircraft is one possible solution.However,using this technique,the actual landing positions cannot be controlled because of the existence of wind and obstacles, such as trees and buildings.Consequently,the coverage may be inferior to the application requirements no matter how many sensors are dropped.Moreover,in many cases, such as during in-building toxic leaks[12],[13],chemical sensors must be placed inside a building from the outside. In these scenarios,it is necessary to make use of mobile sensors,which can move to the correct places to provide the required coverage.One example of a mobile sensor is the Robomote[26].These sensors are smaller than0:000047m3 and cost less than$150.Most previous research efforts on deploying mobile sensors are based on centralized approaches.For example, the work in[30]assumes that a powerful cluster head is available to collect the sensor locations and determine the target locations of the mobile sensors.However,in many sensor deployment environments such as disaster areas and battlefields,a central server may not be available.It may also be hard to organize sensors into clusters due to network partitions.Further,centralized approaches intro-duce a single point of failure.Sensor deployment has also been addressed in the field of robotics[12],where sensors are deployed iteratively one by one,utilizing the location information obtained from the previous deployment.Since sensors are deployed one by one,the deployment time is very long,which can significantly increase the network initialization time.In this paper,we propose two sets of distributed protocols for controlling the movement of sensors to achieve target coverage:basic protocols and virtual movement protocols.In the basic protocols,sensors move iteratively, eventually reaching the final destination.In each iteration, sensors detect coverage holes using a Voronoi diagram.If holes exist,they calculate the target locations to heal the holes and move.In the virtual movement protocols,sensors do not perform iterative physical movement.Instead,after calculating the target locations,sensors move virtually and exchange these new virtual locations with the sensors which would be their neighbors if they had actually moved. The real movement only occurs when the communication cost to reach their logical neighbors is too high or when they determine their final destinations.In both the basic and virtual movement protocols,three algorithms,VEC,VOR,and Minimax,are proposed to calculate the target locations if coverage holes exist.In VEC, sensors move away from a dense area;in VOR,sensors migrate towards holes;in Minimax,sensors also move towards holes,but more conservatively with the considera-tion of not generating new holes.Simulation results show that our distributed protocols are effective in terms of coverage,deployment time and movement.The rest of the paper is organized as follows.Section2 introduces some preliminaries.In Section3,we present the basic self-deployment protocols and,in Section4,we present the virtual movement protocols.Section5evaluates the performance of the proposed protocols.Based on the simulation results,we justify our design and discuss future work in Section6.2P RELIMINARIES2.1Localization TechniquesLocation awareness is important for wireless sensor net-works since many applications such as environment monitoring and target tracking depend on knowing the locations of sensor nodes.Due to the ad hoc nature of such.The authors are with the Department of Computer Science andEngineering,The Pennsylvania State University,University Park,PA16802.E-mail:{guiwang,gcao,tlp}@.Manuscript received17Jan.2005;revised5June2005;accepted19Aug.2005;published online17Apr.2006.For information on obtaining reprints of this article,please send e-mail to:tmc@,and reference IEEECS Log Number TMC-0012-0105.1536-1233/06/$20.00ß2006IEEE Published by the IEEE CS,CASS,ComSoc,IES,&SPSnetworks,each node must determine its location through a location discovery process.For outdoor systems,the Global Positioning System(GPS)[3]is one method for this purpose.GPS may not be cost effective or work well indoors.Many techniques have been proposed to enable each node to determine its location indoors with only limited communication with nearby nodes.Most of these methods exploit received signal strength[22],time difference of arrival of two different signals[25],and angle of arrival[7]. Hu and Evans[14]have provided detailed discussion of these techniques.In subsequent discussion in this paper,we assume that sensor nodes know their locations.2.2Path PlanningIn systems that exploit mobile sensors,finding paths on which these mobile sensors can move to desiring destina-tions,especially when there exist obstacles in the field,is an important problem.The problem has been studied in the area of robotics[6],[17].Recently,Li et al.[18]studied the problem in sensor networks.They combined the above methods to find the best motion path and modified them to exploit the distributed nature of sensor networks.In this paper,we do not study this problem further;we assume that mobile sensors can move to any location where they are asked to move based on the existing techniques.We comment more on the impact of this assumption in Section5.2.2.3Sensing ModelEach type of sensor has its unique sensing model characterized by its sensing area,resolution,and accuracy. The sensing area depends on multiple factors such as the strength of the signals generated at the source,the distance between the source and the sensor,the attenuation rate in propagation,and the desired confidence level of sensing. Let us consider an application[8]in which a network of acoustic sensors is deployed for detecting mobile vehicles.Due to signal attenuation,sensors closer to a vehicle can detect higher strength of acoustic signals than sensors farther away from the vehicle and,thus,have higher confidence for detecting the vehicle.Therefore,given a confidence level,we can derive a sensing range surround-ing each sensor.In this paper,we only consider the isotropic sensing models.Each sensor node is associated with a sensing area which is represented by a circle with the same radius.This is a common assumption when compar-ing algorithms for sensing coverage[20],[21].2.4Voronoi DiagramThe Voronoi diagram[4],[9]is an important data structure in computational geometry.It represents the proximity information about a set of geometric nodes.The Voronoi diagram of a collection of nodes partitions the space into polygons.Every point in a given polygon is closer to the node in this polygon than to any other node. Fig.1a is an example of the Voronoi diagram,and Fig.1b is an example of a Voronoi polygon.We define the Voronoi polygon of s0as G0¼hV0;E0i,where V0is the set of Voronoi vertices of s0,and E0is the set of Voronoi edges.As shown in Fig.1b,V0¼f V1;V2;V3;V4;V5g, and E0¼f V1V2;V2V3;V3V4;V4V5;V5V1g.We use N0to denote the set of Voronoi neighbors of s0.In Fig.1b, N0¼f s1;s2;s3;s4;s5g.The Voronoi edges of s0are the vertical bisectors of the line passing s0and its Voronoi neighbors,e.g.,V1V5is s0s1’s bisector.Our sensor deployment protocols are based on Voronoi diagrams.As shown in Fig.1,each sensor,represented by a number,is enclosed by a Voronoi polygon.These polygons together cover the target field.The points inside one polygon are closer to the sensor inside this polygon than the sensors positioned elsewhere.If this sensor cannot detect the expected phenomenon in its Voronoi polygon,no other sensor can detect it.Therefore,to examine coverage holes,each sensor only needs to check its own VoronoiFig.1.(a)Voronoi diagram.(b)Voronoi polygon G0of s0.polygon.If its sensing area cannot cover the polygon,there are some coverage holes.To construct the Voronoi polygon,sensors first calculate the bisectors of their neighbors and themselves.These bisectors(and possibly the boundary of the target field) form several polygons.The smallest polygon encircling the sensor is the Voronoi polygon of this sensor.2.5Sensing Range versus Communication Range In a distributed case,sensors can exchange the location information by broadcasting.It is possible that some Voronoi neighbors of a sensor are out of its communication range,and,consequently,the calculated polygon of this sensor is not accurate.If the sensing range is much shorter than the communication range,then the inaccurate con-struction of Voronoi cells will not affect the detection of coverage holes.This is because if Voronoi neighbors cannot reach each other by direct communication,their distance is large enough that there is a coverage hole.If communica-tion range is similar to the sensing range,sensors may misdetect coverage holes.We describe our heuristics to deal with the inaccurate construction of the Voronoi polygons in Section3.3T HE B ASIC D EPLOYMENT P ROTOCOLSOur deployment protocol runs iteratively.In each round, sensors first broadcast their locations and construct their Voronoi polygons based on the received neighbor informa-tion.Sensors then determine the existence of coverage holes by examining their Voronoi polygons.If any hole exists, sensors calculate where to move to eliminate or reduce the size of the coverage hole.Three algorithms are proposed to calculate the target locations:VEC pushes sensors away from a densely covered area,VOR pulls sensors to the sparsely covered area,and Minimax moves sensors to the center of their Voronoi polygon.Termination conditions are defined for each algorithm.3.1The VECtor-Based Algorithm(VEC)VEC is motivated by the attributes of electromagnetic particles:When two electromagnetic particles are too close to each other,an expelling force pushes them apart.Assume dðs i;s jÞis the distance between sensor s i and sensor s j.d ave is the average distance between two sensors when the sensors are evenly distributed in the target area,which can be calculated beforehand since the target area and the number of sensors to be deployed are known.The virtual force between two sensors s i and s j will push them to move ðd aveÀdðs i;s jÞÞ=2away from each other.In case one sensor covers its Voronoi polygon completely and should not move,the other sensor will be pushed d aveÀdðs i;s jÞaway. In summary,the virtual force will push the sensors d ave away from each other if a coverage hole exists in either of their Voronoi polygons.The virtual force exerted by s j on s i is denoted as~F ij,with the direction from s j to s i.In addition to the virtual forces generated by sensors,the field boundary also exert forces,denoted as~F b,to push sensors too close to the boundary inward.~F b exerted on s i will push it to move d ave=2Àd bðs iÞ,where d bðs iÞis the distance of s i to the boundary.Since d ave is the average distance between sensors,d ave=2is the distance from the boundary to the sensors closest to it when sensors are evenly distributed.The final overall force on sensors is the vector summa-tion of virtual forces from the boundary and all Voronoi neighbors.These virtual forces will push sensors from the densely covered area to the sparsely covered area.Thus, VEC is a“proactive”algorithm,which tries to relocate sensors to be evenly distributed.As an enhancement,we add a movement-adjustment scheme to reduce the error of virtual-force.When a sensor determines its target location,it checks whether the local coverage will be increased by its movement.The local coverage is defined as the coverage of the local Voronoi polygon and can be calculated by the intersection of the polygon and the sensing circle.If the local coverage is not increased,the sensor should not move to the target location. Although the general direction of the movement is correct, the local coverage may not be increased because the target location is too far away.To address this problem,the sensor will choose the midpoint or3=4point between its target location and its current location as its new target location.If the local coverage is increased at the new target location,the sensor will move;otherwise,it will stay.Fig.2shows an operational example of VEC.Round0is the initial random deployment of35sensors in a 50mÂ50m flat space,with the sensing range ofWANGET AL.:MOVEMENT-ASSISTED SENSOR DEPLOYMENT3 Fig.2.Snapshot of the execution of VEC.(a)Round0.(b)Round1.(c)Round2.six meters and communication range of 20meters.The initial coverage is 75.7percent.After Round 1and Round 2,the coverage is improved to 92.2percent and 94.7percent,respectively.A formal description of the VEC algorithm is shown in Fig.3.3.2The VORonoi-Based Algorithm (VOR)Contrary to the VEC algorithm,VOR is a pull algorithm which pulls sensors to cover their local maximum coverage holes.In VOR,if a sensor detects the existence of coverage holes,it will move toward its farthest Voronoi vertex (denoted as V far ),and stop when the farthest Voronoi vertex can be covered.As in VEC,in VOR,a sensor needs only tocheck its own Voronoi polygon.Fig.4illustrates VOR.Point A is the farthest Voronoi vertex of s 0,and d ðA;s 0Þis longer than the sensing range.To heal the hole,s 0moves along line s 0A to Point B,where d ðA;B Þis equal to the sensing range.We limit the maximum moving distance to be at most half of the communication range minus the sensing range to avoid the situation shown in Fig.5,in which s 0is not aware of the existence of s 1because of communication limitations.When s 0does not know s 1,it will calculate its local Voronoi polygon as the dotted one and view the area around A as a coverage hole.If s 0moves toward point A and stops at a distance d ðA;B Þ(sensing range),apparently s 0has moved more than needed and it tries to cover the area which is already covered by s 1.It is quite possible it has to move back after it gets to know s 1.Therefore,we set the maximum moving distance such that a sensor moves towards the coverage hole step-by-step.After s 0moves a certain distance and gets closer to s 1,it can communicate with s 1and calculate the correct Voronoi polygon.Then the risk of moving oscillation can be greatly reduced.VOR is a greedy algorithm which tries to fix the largest hole.Moving oscillations may occur if new holes are generated due to a sensor’s leaving.To deal with this problem,we add oscillation control which does not allow sensors to move backward immediately.Before a sensor moves,it first checks whether its moving direction is opposite to that in the previous round.If yes,it stops for one round.In addition,the movement adjustment men-tioned in VEC is also applied here.The deployment protocol using VOR is similar to the VEC Protocol,except that in line (2.2)V EC ðÞis replaced by V OR ðÞ,which is shownbelow.We run VOR on the same initial deployment as shown in Fig.2a.After round 1and round 2,the coverage is improved to 89.2percent and 95.6percent,respectively.3.3The Minimax AlgorithmSimilarly to VOR,Minimax fixes holes by moving closer to the farthest Voronoi vertex,but it does not move as far as4IEEE TRANSACTIONS ON MOBILE COMPUTING,VOL.6,NO.6,JUNE2006Fig.3.The VEC protocol at sensor s i.Fig.4.VOR.Fig.5.Inaccurate Voronoi polygon.VOR to avoid situations in which a vertex that was originally close becomes a new farthest vertex.Minimax chooses the target location as the point inside the Voronoi polygon whose distance to the farthest Voronoi vertex(V far) is minimized.We call this point the Minimax point,denoted as O m.This algorithm is based on the belief that a sensor should not be too far away from any of its Voronoi vertices when the sensors are evenly distributed.Minimax can reduce the variance of the distances to the Voronoi Vertices, resulting in a more regular shaped Voronoi polygon,which better utilizes the sensor’s sensing pared with VOR,Minimax considers more information and it is more pared with VEC,Minimax is“reactive”; it fixes the hole more directly by moving toward the farthest Voronoi vertex.The Minimax point is the center of the smallest enclosing circle of the Voronoi vertices and can be calculated by the algorithms described in[19],[27],[29].In the deployment protocol using Minimax,we also specify the maximum moving distance and do oscillation control as in VOR.We run Minimax on the same initial deployment as shown in Fig.2a.After round1and round2,the coverage is improved to92.7percent and96.5percent,respectively. 3.4TerminationThe algorithm terminates naturally based on the movement-adjustment heuristic(explained in Section3.1),which does not allow sensors to move unless the local coverage can be increased.The total coverage,bounded by100percent, increases as the local coverage increases.Based on the attributes of Voronoi diagram,the local coverage increase of one sensor does not affect the local coverage of another sensor.Thus,sensors will stop naturally when the coverage cannot be increased.The formal proof is shown inthe Appendix.In some applications,the coverage requirement may be met without achieving maximum coverage.In these cases,it may be prudent to terminate the deployment process before the maximum coverage is reached to save power and reduce the deployment time.To terminate the deployment procedure earlier,we use a threshold ,defined as the minimum increase in coverage below which a sensor will not move.With a larger ,the deployment will finish earlier. When ¼0,sensors stop when the best coverage is obtained.3.5Optimizations3.5.1Dealing With Message LossHello messages may be lost due to collisions.Consequently, sensors may fail to know the existence of some Voronoi neighbors and mistakenly determine coverage holes.To address this problem,we associate each item in a sensor’s neighbor list with a number which indicates the freshness of this item,that is,for how many rounds this neighbor has not been heard.When constructing the Voronoi polygon, sensors only consider the sensors in its neighbor list with certain freshness.For example,only sensors that have been heard within the last two rounds can be considered when constructing the Voronoi polygon.Supposing the prob-ability of message loss is5percent,the probability that a message is lost two consecutive times is0.25percent. Therefore,if a sensor does not hear a Hello message from a neighbor for two consecutive cycles,it can assume that the neighbor has moved and be correct with a99.75percent chance.This solution introduces a new problem.If a sensor actually moves to a new place,its previous neighbors cannot hear it.If these old neighbors still consider this sensor in their formation of the Voronoi polygons until the freshness threshold is violated,it will prolong the deploy-ment process.To address this problem,we propose that a sensor broadcasts its new location before it moves so that its neighbors can react promptly if a new hole is generated by its leaving.3.5.2Dealing with Position ClusteringIn some cases,the initial deployment of sensors may form clusters,as shown in Fig.6,resulting in low initial coverage. In this case,sensors located inside the clusters cannot move for several rounds,since their Voronoi polygons are well covered initially.This problem prolongs the deployment time,as is shown in Fig.6,in which some sensors are still clustered together after the sixth round.To reduce the deployment time in this situation,we propose an optimiza-tion which detects whether too many sensors are clustered in a small area.The algorithm“explodes”the cluster to scatter the sensors apart.Each sensor compares its current neighbor number to the neighbor number it will have if sensors are evenly distributed.If a sensor finds the ratio of these two numbers is larger than a threshold,it concludes that it is inside a cluster and chooses a random position within an area centered at itself which will contain the sameWANG ETAL.:MOVEMENT-ASSISTED SENSOR DEPLOYMENT5Fig.6.Working procedure(VOR).number of sensors as its current neighbors in the even distribution.The explosion algorithm only runs in the first round.It scatters the clustered sensors and changes the deployment to be close to random.4D EPLOYMENT P ROTOCOLS WITH V IRTUAL M OVEMENTThe basic protocols require sensors to move iteratively, eventually reaching the final destination.Other approaches can be envisioned in which the sensors move only once to their destination to minimize the sensor movement.One such approach is to let sensors stay fixed and obtain their final destinations by simulated movement.With the same round-by-round procedure,sensors calculate their target locations,virtually move there,and exchange these new virtual locations with the sensors which would be their neighbors as if they had actually moved.The real move-ment only happens at the last round after final destinations are determined.We did not deploy this alternative method for two reasons.First,this approach is susceptible to poor perfor-mance under network partitions,which are likely to occur in a sensor deployment.If a network partition occurs,each partition will exercise the movement algorithms without knowledge of the others.Consequently,the obtained final destination is not accurate and the required coverage cannot be ing real movement,the network partitions will be healed allowing all sensors to be eventually considered in the algorithm.A second reason is the high communication overhead.To guarantee logical neighbors are reached,a network-wide broadcast is needed when using simulated mobility.If this network-wide broadcast is implemented by gossiping,the message complexity is at minimum2rn2(here,r is the number of rounds needed and n is the number of sensors in the network).Using actual mobility as in the basic protocols,a much lower message complexity,2rn,is sufficient.To get balance between movement and message com-plexity,we propose to let sensors do virtual movement when the communication cost to reach the logical Voronoi neighbors is reasonable,and physical movement otherwise. The challenge is to determine if a sensor can reach its logical neighbors with reasonable communication cost.We pro-pose the following heuristics.First,if a sensor’s distance to its farthest Voronoi vertex is shorter than half of the communication range,it must know all its Voronoi neighbors.In this case,one hop broadcast(same in the basic protocols)is enough toexchange the location information with its logical neighbors and physical movement is not necessary.Otherwise,it is possible that some Voronoi neighbors are out of the communication range.To get the locations of these Voronoi neighbors,sensors request their neighbors within the communication range to broadcast their neighbor lists,thus obtaining the logical positions of sensors located within two broadcast hops.When the distances between the physical locations of sensors and their farthest Voronoi Vertices are larger than two times the maximum moving distance, sensors should move physically.In realization,we divide the discovery phase into two subphases.In the first subphase,sensors broadcast hello messages;in the second subphase,sensors broadcast the locations of known neighbors.In one round,if a sensor’s distance to its farthest Voronoi vertex is larger than half of the communication range,it will calculate the target location as in the basic schemes and do logical movement. In the next round,it will set a flag in the hello messages, indicating that it wants its neighbors to broadcast their neighbor list.Any sensor that receives a hello message with such a flag will broadcast its neighbor list in the second subphase of the discovery phase.In this way,the message complexity is at most two times the basic scheme in one round.The flag will not be reset until the sensor moves physically.Sensors move physically under two conditions: One is that its physical position is two times the maximum moving distance to its farthest Voronoi vertex,as discussed above.The second condition is that a sensor’s logical position has not changed for several rounds.Then,the sensor can determine that it has obtained its final location and it can move.The formal description of the protocol with the virtual movement is shown in Fig.7.6IEEE TRANSACTIONS ON MOBILE COMPUTING,VOL.6,NO.6,JUNE2006Fig.7.Virtual movement protocols at s i.5P ERFORMANCE E VALUATIONS5.1Objectives,Metrics,and MethodologyWe implement our deployment protocols in the ns-2 (version 2.1b9a),a standard network simulator.Our objectives in conducting this evaluation study are threefold: first,testing the effectiveness of our protocols in providing high coverage;second,by comparing VEC,VOR and Minimax,and comparing the basic protocols and the virtual movement protocols,giving some insight on choosing protocols in different situations;finally,studying the effectiveness of controlling the trade-off among various metrics by adjusting parameters.We analyze the performance of our protocols from two aspects:deployment quality and energy consumption.Deploy-ment quality is measured by the sensor coverage and the time(number of rounds)to reach this coverage.Deploy-ment time is determined by the number of rounds needed and the time of each round.The duration of each round is primarily determined by the moving speed of sensors, which is the mechanical attribute of sensors.Thus,we only use the number of rounds to measure the deployment time. Energy consumption includes two parts,mechanical move-ment and communication.Message complexity is used to measure the energy consumed in communication.As for movement,the energy consumed in moving a sensor n meters consists of two parts:starting/braking energy and moving energy.Therefore,we use moving distance and the number of movement as the metrics.We run simulations under different sensor densities, which determines the sensor coverage that can be reached and the difficulty to reach it.In a100mÂ100m target field, we distribute four different numbers of sensors,ranging from120to180,in increments of20sensors.The initial deployment follows the random distribution.Most simula-tion results are under the termination condition that is equal to1percent divided by the number of sensors.To evaluate each metric under different parameter settings,we run10experiments based on different initial distribution and calculate the average results.We choose802.11as the MAC layer protocol and DSDV as the routing protocol.The physical layer is modeled after the RF MOTE from Berkeley,with916.5MHz OOK5kbps as the bandwidth and20meters as the transmission range.Based on the information from[1],we set the sensing range to be6meters.This is consistent with other current sensor prototypes,such as Smart1(University of California, Berkeley),CTOS dust,and Wins(Rockwell)[2].5.2Simulation Results5.2.1CoverageFig.8shows the coverage obtained when the coverage increase threshold is equal to1divided by the number of sensors.From the figure,we can see that the coverage is greatly increased by all three algorithms compared to the initial random distribution.For example,when140sensors are deployed,Minimax and VOR can increase the coverage to be more than98percent from77.7percent.In contrast,to obtain the same coverage under random deployment,on average,340sensors are required.Also,by analyzing the trace of the basic protocols,we find the coverage increases very quickly during the first several rounds.For example,in most of the cases,the coverage can be increased to more than85percent after the first round when120sensors are deployed and more than 90percent in higher sensor densities.In the virtual movement protocols,actual coverage increase happens after the real movement.Among VEC,VOR,and Minimax,VEC performs the worst.The primary reason is that VEC is sensitive to the initial deployment.Consider an extreme situation in which sensors are located in the same line with equal spacing.In this case,no sensor will move,since the virtual forces offset each other,though there are large coverage holes.If the sensors are located in similar relative positions initially, VEC does not perform well.In addition,VEC neither considers coverage holes nor utilizes any geometric information from the Voronoi polygons when choosing the target locations.It tries to reach relatively balanced positions among the sensors,despite the difficulty of obtaining an exact,global,even distribution from only local information.VOR and Minimax achieve quite similar coverage.They both move to heal the holes directly.VOR is more greedy and may move more than needed,thus generating new coverage holes.But finally,VOR will move sensors back to the correct positions if coverage can be increased by doing so.WANGET AL.:MOVEMENT-ASSISTED SENSOR DEPLOYMENT7 Fig.8.Coverage.(a)Basic protocols.(b)Virtual movement.。