CC-LINK配置及编程方法
cc-link-介绍

通信速度 總延長距離
最大連接局數
CC-Link 規格II CC規格II
網 路 形 式 項 目 CC-Link
遠端 I/O ( RX, RY ) : 2048 點 每一網路系統最大網 遠端暫存器 ( RWw ) : 256 點 (主局對 local/remote ) 路連接點位 遠端暫存器 ( RWr ) : 256 點 ( local/remote 對主局 ) 傳輸路徑 適用傳輸線 參數登錄次數 I/O 佔有點數 DC 5V 消耗電流 Bus ( RS485 ) 遮蔽式雙絞線電纜 10,000 次 32 點 0.46A(QJ61BT11)
CC-Link 設定與應用
士林電機 :吳俊逸
綱要
CC-LINK功能 系統架構 CC-LINK特性 QJ61BT11模組規格 CC-LINK站號設定 PLC內部參數設定 名詞解釋
CC-LINK功能
CC-Link : 控制&通信連結(Control & Communication Link) (1) 透過各模組分布在裝置設備(如傳輸線與機器設 備)整個系統配線管理可完成 (2) 模組可處理ON/OFF數據如I/O或數值數據,以完 成簡單高速通訊 (3) 透過連接多台PLC CPU ,可構成一個簡單的分 散系統 (4) 可連接由合作廠商製造不同型號的設備,使系統 更靈活
模組各部名稱
說明 LED指示燈
LED 名稱 RUN MST SD ERR. L RUN S MST RD L ERR 說明 ON:模組正常 OFF :監視計時器錯誤發 生 ON:模組設定為主局 ON:正在傳送資料 ON:所有局通信錯誤 OFF :有通信故障局存在 ON:執行資料連結 ON:模組設定待機主局 ON:正在接收資料 ON:傳輸錯誤(HOST)
川崎CC-LINK参数设定
川崎机器人CC-LINK参数设置方法
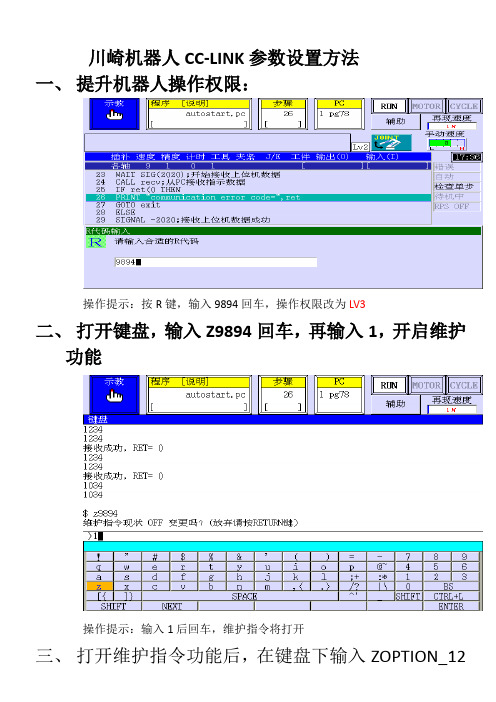
一、提升机器人操作权限:
操作提示:按R键,输入9894回车,操作权限改为LV3
二、打开键盘,输入Z9894回车,再输入1,开启维护
功能
操作提示:输入1后回车,维护指令将打开
三、打开维护指令功能后,在键盘下输入ZOPTION_12
回车,按提示菜单将现场总线通信功能打开(下图第二项)
四、输入R代码060805,进入辅助功能之CC-LINK现
场网络参数设置:
操作提示:也可点击辅助—输入/输出信号—信号配置设定—CC-LINK参数设
定,一步一步进入子菜单进行参数设定
4.1 通用参数设定
4.2站数据设定:
操作提示:
我们统一规定将站数据设定为:站类型1 Ver. 2.0; 站类型2 智能设备扩展循环:4倍,占有站数:4站
4.3远程登陆数设定:
远程登录数(主从口)均设定为64
五、其它I/O物理接口分配(默认)
六、信号列顺序设定(默认)
八:其它测试数据记录:
1、经现场实测得到:当站数据设定为:Ver. 2.0, 4局4站时,每台智能设备
占用448点(BIT位),其中前256位可与主站(PLC)一一对应,256位之后暂
不能对应上(有待验证);
2、硬件上CC-LINK板卡上S2第三位拔码开关拔到1,表示4局4站;
3、站地址设定开关为10进制数字设定;
4、CC-LINK插头接线:DA、DB、DG颜色各站一一对应,FG接屏蔽线,DA,DB之间在第一个站和最后一个站时需连接一只110欧的终端电阻。
CCLINK主站和从站通信使用说明

所示,由于机器人站为远程设备站,则从站类型选32-如下图点。,所用远程站点数为择远程设备站,占用站数为4128
从站信息设置3 -2图
其次,需要安装CC-Link从站板卡驱动,对其进行软件参数配置,如下图2-4所示,选择configuration,其中,波特率的大小与主站波特率相同、CC-Link
主站模块安装位置1-1 CC-Link图主站和从站的外部硬件接线CC-Link1)所示为主从站之间的接线,若有多台机器人作为从站,从如图1-2站之间的接线同样可以参照此图,只需在最后一个从站连接终端电阻。主站从站
主从站的外部硬件接线2图1-主站和从站外部硬件站号和波特率设置。CC-Link2)
4每个机器人站作为远程设备站,占用64个从站,主站可以连接1-。4)个站数,实际可以根据需要设置从站所占用的站数目(范围为:1-,从站的0-3所示为站号和波特率设置过程,主站的站号设为1如下图。同时,主站和所有从站的波特率大小必须相、9..........、站号依次为15。10Mbps、5Mbps、、625kbps、156kbps同,可选择的传送速率为
站号设置波特率设置
图1-3站号和波特率设置
2CC-Link主站和从站的参数配置
首先需要在PLC编程软件上进行参数设置,包括以下3点:
1)在PLC编程软件中对PLC参数进行设置。
如下图2-1所示,在安装CC-Link模块插槽所对应的槽号上选择智能类型,该模块的点数为32点。
参数设置-1 PLC图2主站进行参数设置。-Link对CC2)、、20002如下图2-所示,起始I/O号选择偶数位较合适,如参数自动起动,数据连接类型为主站CPU类型为主站,6040、等,总连接台数根据实际从站数目来选择,,(模式)模式设置为远程网络
三菱CCLINK INTERNET设置样例
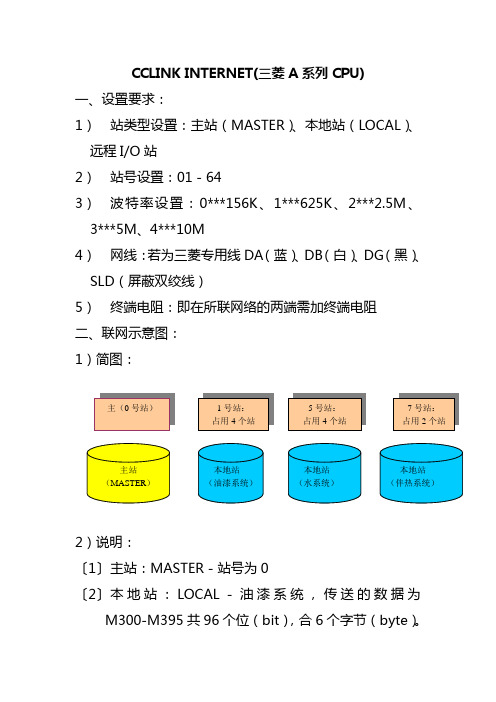
CCLINK INTERNET(三菱A 系列CPU)一、设置要求:1) 站类型设置:主站(MASTER )、本地站(LOCAL )、远程I/O 站2) 站号设置:01-643) 波特率设置:0***156K 、1***625K 、2***2.5M 、3***5M 、4***10M4) 网线:若为三菱专用线DA (蓝)、DB (白)、DG (黑)、SLD (屏蔽双绞线)5) 终端电阻:即在所联网络的两端需加终端电阻二、联网示意图:1)简图:2)说明:〔1〕 主站:MASTER -站号为0〔2〕 本地站:LOCAL -油漆系统,传送的数据为M300-M395共96个位(bit ),合6个字节(byte )。
<a>设定站号:NO.STATION――01<b>设定条件设置开关sw4为ON(OFF:1,ON:4),即油漆系统共占有1、2、3、4四个站;而一个站仅能传送远程输入(RY)32位(bit),合2个字节(byte)。
<c>1号本地站的写入远程输出(Ry)的缓冲存储器开始地址为H160,指令为:||M9036|―〔TO H12 H160 K4M300 K6〕〔3〕本地站:LOCAL-水系统,传送数据为M200-M231共32位(bit),合2个字节(byte)<a>设定站号:NO.STATION――05<a>FX系列PLC的cclink规定其模块的占用站数为2个,即5号和6号站指令为:〔TO k0 k0 K4M200 K2〕3〕本地站:LOCAL-伴热系统,传送数据为M200-M231共32位(bit),合2个字节(byte)<a>设定站号:NO.STATION――07<a>FX系列PLC的cclink规定其模块的占用站数为2个,即7号和8号站指令为:〔TO k0 k0 K4M200 K2〕。
ABB机器人CCLink 配置

ABB机器人CCLink 配置ABB机器人提供CC-Link总线的支持。
ABB机器人通过DSQC 378B(如下图)模块,把CC-Link协议转化成Devicenet协议,与机器人控制器通讯。
上图X5部分为Devicenet通讯与地址设置端子,具体参见3.1节Devicenet 的设置。
OccSta和 BasicIO共同决定了输入输出的数量,具体见下表。
以上参数需要通过DevicenetCommand进行设置。
为方便设置,可以从以下位置获取模板并配置。
1)打开robotstudio,进入Add-Ins,在左侧找到对应的机器人robotware版本,右击——“打开数据包文件夹”2)进入如下路径C:\ProgramData\ABBIndustrialIT\RoboticsIT\DistributionPackages\ABB.RobotWare-6.08.0134\RobotPackages\RobotWare_RPK_6.08.0134\utility\serv ice\\ioconfig\DeviceNet3)d378B_10.cfg为需要的模板文件。
(此处假设d378B模块在Devicenet网络下的地址为10)4)进入示教器-控制面板-配置,点击左下角“文件”——“加载参数”,选择步骤3找到的配置文件。
完成后重启。
5)进入“配置”-DevicenetDevice下可以看到新加入的D378B_10设备,如果Devicenet地址不是10,可以进入修改。
6)进入Devicenet Command对CC-Link相关参数进行设置7)参数含义参见本节一开始所述表格。
下图示例的含义为:StationNumber:1;BaudRate:156kbps;OccSta:1;BasicIO:0;输入输出各为:16bit(2bytes)8)添加signal,方法同前文所述。
Assigned to Device选择刚刚配置完毕的D378B_10.。
CC-Link+配置与编程

PLC-CPU
主站
Y1000Y1000-Y100F
远程站1
(占1个逻辑站)
远程站2
(占1个逻辑站)
Y1000Y1000-Y100F Y1010Y1010-Y101F Y1020Y1020-Y102F Y1030Y1030-Y103F
远程站2
(占1个逻辑站)
D2000D2000-D2003
D2004D2004-D2007
D2004D2004-D2007
D2008D2008-D2011
站信息设定(系统组态简单)
操作动作:
远程设备站 占几个逻辑站
链接的点数 在Ver2.0中,如果用到扩展循环设定(以只占一个 站为例说明RX,RY,RWr,RWw如何分配) 设定1倍 设定2倍 设定4倍 设定8倍 RXRY: 各32点 各32点 各64点 各128点 RWwr: 各4字 各8字 各16字 各32字
主站 备用主站
子站 子站 子站
子站
备用主站功能 子站异常时自动脱离, 不影响其他站点的正常通讯 如同恢复后可自动恢复到数据链接中,无需复位整个系统 测试和诊断功能
和远程I/O通讯处理 系统处理过程:
和远程设备站通讯处理
系统处理过程:
举例
远程I/O举例
硬件连接
(1) I
(2) O
只要对远程站进行站号和通讯速率的设定
Y
Y1010Y1010-Y101F Y1020Y1020-Y102F Y1030Y1030-Y103F
自动刷新映射关系3
主站CPU为每个远程逻辑站 逻辑站分配了4个Dr/Dw的远程寄存器 逻辑站
PLC-CPU
ABB 6.01配置cclink
2015-12-23
1
新系统配置cclink
1.选择控制面板
1
2
2.点击配置13.选择DeviceNet Device
1
4. 点击添加
1
5.点击默认下拉菜单
1
6.找到CClink默认板块
1
7.配置好相关选项后点击确定
1
8.打开DeviceNet Command
1
9.点击添加
1
10.参照老版本中StationNo中的数据添加
1
11.依次添加剩下三个数据
1
1
1
下面是三菱Q系列PLC与机器人cclink通讯设置
1.点击网络参数里的CC-LINK
1
2.在总连接台数处设置连接的模块数,然后点击“站信息”,进入 站信息设置界面。
1
3.在站信息设置界面会出现与第二步对应数目的台数,注意把机器 人CC-LINK设置为智能设备站,自己选择占用一个站(32点)或 二个站(64点)。
1
4.机器人那边的“Occstat”和“BasicIO”配合选取点数比PLC所需的 点多而且最接近那个,如PLC设置两个站64点,那么“Occstat”和 “BasicIO”配合选取80点的。
1
5. “Occstat”和“BasicIO”共同决定的IO数据地址范围如图
1
1
CCLINK教程

CCLINK教程
CCLINK教程(五节课)
第一节课:硬件的原理、CCLINK的通信原理、主通讯程序的设置
1、16MAST主站的硬件原理、接线方法、设定方法、存贮单元说明
按手册讲课
A、通讯站的设定,主站为0号,1号站后跨过3号站则自动将分配4人RX/RY给
1号站,原来只有2个,RWr/w也相应双倍,变为8个,原来是4个,不能设
定1号站后就直接设置4号站,否则要设置一个无效站。
接收和发送存存贮器有2种对应子站
2、数据的发送和接收原理
3、主站通讯程序的设置和写入
4、主站通讯程序编程
第二节课:主站与1号CPU从站的控制编程
1、主站控X0—X7控制1号从站的Y0-Y7输出
2、主站控制从站的的变频正反转点动运行
3、从站控制主站的变频正反转点动运行
第三节课:主站与1号、2号站的多站编程
1、主站控制1号站变频运行
2、主站控制2号站机械手动作
3、1号站控制主站的变频运行
4、2号站控制1号站的机械手动作
第四节课:1号从站与主2号从站通讯主站的通讯编程
1、1号站经主站控制2号站机械手动作
2、2号站经主站控制1号站变频运行
第五节课:辅导和复习
让学生自习以前课程再进行编程。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
C C-L I N K配置及编程
方法
-CAL-FENGHAI.-(YICAI)-Company One1
CC-LINK参数设置及故障处理(Q06UDEH CPU)
1.依次点击参数—网络参数—CC-LINK:
红色字体部分不需要设置
蓝色字体部分中需要设置
模块数 CC-Link 模块的数量。
在一个站中最多可以安装 4 个 CC-Link 模块。
起始I/O号CC-Link 模块的起始 I/O 号的地址。
CPU 为每个 CC-Link 模块的输入和输出分配 32 个地址,此地址和模块的安装位置有关。
类型设定是主站还是本地站
模式设置两种模式可选择:远程网络模式(远程网络模式和远程网络模式)和远程 I/O 模式。
远程网络模式适用于所有的站,而远程 I/O 模式只适用于从站是远程 I/O 站的情况。
如从站都是远程 I/O 站,使用远程 I/O 模式比使用远程网络模式链接扫描时间更快。
总链接数链接从站的物理数目,而不是站号数。
远程输入(RX)刷新软元件远程输入 RX 缓冲区(BFM)的首地址。
远程输出(RY)刷新软元件远程输出 RY 缓冲区(BFM)的首地址。
远程寄存器(RWr)刷新软元件远程读寄存器 RWr 缓冲区(BFM)的首地址。
远程寄存器(RWw)刷新软元件远程写寄存器 RWw 缓冲区(BFM)的首地址。
特殊继电器(SB)刷新软元件特殊继电器 SB 缓冲区(BFM)的首地址。
特殊寄存器(SW)刷新软元件特殊寄存器 SW 缓冲区(BFM)的首地址。
重试次数通讯失败后的重试次数。
CPU 指定 CPU 发生故障时的通讯状态(停止或继续)。
扫描模式指定指定通讯时的扫描模式。
处理信号和扫描信号同时进行时是同步模式,反之为异步模式。
2.在站信息中要设置好每个子站占用的站数(具体可参照官网手册)
检查没有错误之后可下载到PLC中进行测试;
下载完成后需要进行CPU和远程模块复位操作;
3.重新上电可进行系统监视和CC-LINK诊断操作。
依次点击诊断—CC-LINK诊断:
发现错误后,可进行线路测试操作(检查线路是否通畅);
如果接线有问题,可到现场检查梳理(接线方式可查书册)。
4.如果确认接线没问题,多次进行线路测试,发现错误的站点在游走,如下图:
可进行以下检查(第四步很重要):
第一步检查CC-LINK参数配置中站信息的配置与实际是否一致;
第二步可检查每个子站的地址是否设置正确,且没有重复;
第三步检查是否按要求接上终端电阻(常规110欧姆);
第四步检查主站模块的波特率是否与远程站设置成一致,且波特率不要设置过高,若设置过高会导致通讯时有时无。
0对应156kbps,扫描时间800ms,
1对应652kbps,扫描时间400ms
2对应,扫描时间100ms
3对应5Mbps,扫描时间50ms
4对应10Mbps,扫描时间50ms
PW灯和RUN灯、L RUN灯常亮则通讯正常。