(嵌入式系统课件)16PWM
嵌入式技术及其应用演示课件.ppt
电
2.9 5.8 0.4 2.9 0.5 1.9 3.6 0.4 0.4 0.6 0.5 0.5
流
(mA)
v.
充电管理
电池是嵌入式系统中常用的电源。随着 嵌入式技术的发展,各种电池供电系统 的需求量呈直线上升趋势。因而,针对 电池的电源管理系统的设计技术得到了 大力发展。本节将针对电池供电系统的 电源管理系统作详细的阐述。采用非电 池供电的系统仍然可以应用本节原理进 行系统的设计。
v.
嵌入式系统的低功耗设计是通过电源管理技 术实现的,而电源管理技术则是以硬件支持 为基础的,没有硬件系统的支持,电源管理 便无从谈起。硬件芯片自身具有低功耗特性 时,系统设计可以简化。 软件低功耗设计逐渐得到了发展,包含操作 系统特性在内的低功耗算法已经开始逐渐应 用到嵌入式系统当中了。事实表明,软件低 功耗策略可以在很大程度上降低嵌入式系统 的功耗。
v.
MAXIAM公司的MAX8214集成电路
v.
短路和过流
短路和过流不仅会损坏系统的电源和电源电路, 也对系统其它用电部件产生不良影响甚至损坏。 因此,在短路和过流发生时,电源保护电路应 立即产生动作切断供电,保护系统不受损失, 待有害低阻抗负载移除后再进行正常供电。 短路的判断方法是通过检测电源的当前电源电 压低于预先设定的阈值电压的速率。 过流的判断方法是通过连续检测放电电流,与 预先设定的基准相比较,如果在规定的延迟时 间内超过了基准电流,则判定发生了过流。
电源调整管工作在线性范围,且输出电 流要流过调整管的集电极和发射极,因 而输入电压至少要高于调整管的Uces, 也就是调整管的饱和结压降。当输出电 流较大时,带来的损耗较大 。
v.
线性稳压电源优点
技术成熟; 静态年来开发出各种低压差线性稳压器 VLDO 集 成稳压电源芯片克服了普通线性稳压电源的缺 点,其指标可达到输出100mA电流时,其压差 在100mV 左右的水平,某些小电流的低压差线 性稳压器其压差仅几十毫伏。
嵌入式系统教学:嵌入式系统及应用PPT课件

仿真器
用于模拟嵌入式系统的运行环境,便 于开发者在真实硬件之前进行调试和 测试。
调试器
用于在嵌入式系统运行过程中进行实 时调试,帮助开发者定位和解决问题。
交叉编译器
将应用程序代码编译为目标硬件平台 上的可执行文件,实现跨平台开发。
03 嵌入式系统的应用
智能家居
智能家居是嵌入式系统的重要应用领域之一,通过嵌入式系 统可以实现家庭设备的智能化控制和管理,提高生活便利性 和舒适度。
、医学影像设备等。
汽车电子
嵌入式系统用于汽车电 子控制系统,如发动机
控制、车身控制等。
嵌入式系统的发展历程
01
02
03
起源
嵌入式系统的概念起源于 20世纪70年代,主要用于 工业控制领域。
发展
随着微处理器技术的发展, 嵌入式系统逐渐普及,应 用领域不断扩大。
趋势
未来嵌入式系统将朝着智 能化、网络化、低功耗等 方向发展。
RTOS技术具有可移植性和可裁 剪性,可以根据实际需求进行 定制化开发,提高系统的可靠 性和性能。
06 嵌入式系统发展趋势与挑 战
物联网时代的嵌入式系统
嵌入式系统在物联网中的应用
嵌入式系统作为物联网的重要组成部分,广泛应用于智能家居、智能交通、智能制造等领域,实现设备间的互联 互通和智能化控制。
提高实际操作能力。
项目实践
组织学生进行嵌入式系统的项目 实践,将理论知识应用于实际项 目中,提高学生的综合应用能力。
注重培养学生的实际动手能力
提供实验设备和实验环境
学校应提供先进的实验设备和实验环境,满足学生进行实验和实 践的需求。
加强实验课程建设
增加实验课程的比重,设计更多具有挑战性和实用性的实验项目, 引导学生主动实践。
嵌入式开发课件.ppt

数据总线 序 / 数 据
地址总线 存 储
器
嵌入式系统开发及应用
2.哈佛(Harvard)
结构
哈佛结构的主要特点是
将程序和数据存储在不同的 存储空间中,即程序存储器
数据总线
程
和数据存储器是两个相互独
序
立的存储器,每个存储器独 立编址、独立访问。系统中
存
具有程序的数据总线与地址 总线,数据的数据总线与地 址总线。这种分离的程序总
大概有20%的比较简单的指令被反复使用。 • 精简指令集(Reduced Instruction Set Computer,RISC)体系
优先选取使用频率最高的、很有用但不复杂 的指令,避免使用复杂指令;固定指令长度,减 少指令格式和寻址方式种类。
嵌入式系统开发及应用
1.2.3 流水线技术
指令流水线是将一条指令分解成m个子过程,
嵌入式系统开发及应用
1.3.3 嵌入式DSP处理器
嵌入式DSP处理器(Digital Signal Processor,DSP)是专门用于信号处理方面的 处理器,芯片内部采用程序和数据分开存储和 传输的哈佛结构,具有专门硬件乘法器,采用 流水线操作,提供特殊的DSP指令,可用来快速 地实现各种数字信号处理算法,使其处理速度 比最快的CPU还快10---50倍。
目前主流的32位嵌入式微处理器系列主 要有ARM系列等。
ARM(Advanced RISC Machine)公司的 微处理器体系结构目前被公认为是嵌入式应用 领域领先的32位嵌入式RISC微处理器结构。
目前,70%的移动电话、手持PC采用了ARM处理器,许多芯片厂商都是ARM的授权用户,如Intel、 Samsung、TI等公司。
嵌入式系统开发及应用
驱动模块详解

16 位脉宽调制器方式
每个PCA0模块都可以工作在16位PWM方式。在该方式下,16位捕捉/比较模块定义 PWM信号低电平时间的PCA0时钟数。当PCA0计数器与模块的值匹配时,CEXn的输 出被置为高电平;当计数器溢出时,CEXn的输出被置为低电平。为了输出一个占空比 可变的波形,新值的写入应与PCA0 CCFn匹配中断同步。置‘1’ PCA0CPMn寄存器中 的ECOMn、PWMn和PWM16n位将使能16位脉冲宽度调制器方式。为了输出一个占空 比可变的波形,应将CCFn设置为逻辑‘1’以允许匹配中断。16位PWM方式的占空比由 方程23.3给出。关于捕捉/比较寄存器的重要注意事项:当向PCA0的捕捉/比较寄存器 写入一个16位数值时,应先写低字节。向PCA0CPLn的写入操作将清‘0’ECOMn位; 向PCA0CPHn写入时将置‘1’ECOMn位。方程23.3 16位PWM的占空比=(65536 − PCA0CPn )/65536 由方程23.3可知,最大占空比为100%(PCA0CPn = 0),最小占 空比为0.0015%(PCA0CPn= 0xFFFF)。可以通过清‘0’ECOMn位产生0%的占空比。
PCA 计数器/定时器
16 位的PCA 计数器/定时器由两个8 位的SFR 组成:PCA0L 和PCA0H。PCA0H 是 16位计数器/定时器的高字节(MSB),而PCA0L 是低字节(LSB)。PCA0MD 寄存 器中的CPS2-CPS0 位用于选择PCA 计数器/定时器的时基信号,如表23.1 所示。注 意:在“外部振荡源/8 模式”,外部振荡源与系统时钟同步,其频率必须小于或等于 系统时钟。当计数器/定时器溢出时(从0xFFFF 到0x0000),PCA0MD 中的计数器 溢出标志(CF)被置为逻辑1 并产生一个中断请求(如果CF 中断被允许)。将 PCA0MD 中ECF 位设置为逻辑1 即可允许CF 标志产生中断请求。当CPU 转向中断 服务程序时,CF 位不能被硬件自动清除,必须用软件清0。(注意:要使CF 中断得 到响应,必须先总体允许PCA0 中断。通过将EA 位(IE.7)和EPCA0 位(EIE1.3) 设置为逻辑1 来总体允许PCA0 中断。)清除PCA0MD寄存器中的CIDL 位将允许PCA 在微控制器内核处于空闲方式时继续正常工作。
嵌入式系统PPT课件

– 设计过程应该是逐步细化和逐步完善的过程
• 面向对象的方法 以类及交互模式为中心
27
系统软件结构的设计
• 结构化方法(SA/SD) • 面向对象的方法(OOA/OOD)
– UML建模
28
结构设计的验证
• 结构设计的正确性非常关键 – 详细设计和实现的基础,对开发周期、成本有很大影响
• 验证所关心的问题 – 结构设计是否满足功能、性能要求 – 能否实现
• 软硬件协同设计 • 功耗的优化设计 • 嵌入式操作系统 • 开发环境 • 成本和开发周期 • 代码优化 • 高效的输入和输出 • 测试环境
7
嵌入式系统软件技术面临的几大问题
• 嵌入式软件全生命周期开发工具链 • 硬件与软件的Co-Design: Verilog + C = ? • 驱动程序的设计和生成技术(嵌入式软件开发中
– EDA设计工具
嵌入式系统ppt课件

iPhone®
Went on sale in June 2007
One Samsung ARM1176
application processor core
Memory capacity: 8 – 16 GB
Display: 3.5 inch widescreen multitouch
Operating system: MAC OS X
Embedded system: any device that includes a programmable computer but is not itself a general-purpose computer With OS (use microprocessors) Without OS (use microcontrollers)
3 output ports, 6 wire digital platform
100 x 64 pixel LCD graphical display
Sound channel with 8-bit resolution
Stores multiple programs
精选ppt
11
应用范例介绍二
嵌入式系统 概论
精选ppt
1
What is this?
பைடு நூலகம்
The Von Neumann Architecture
精选ppt
2
What is Embedded ?
精选ppt
3
什么是嵌入式系统?
计算机,假装自己不是计算机…… (Stephen A. Edwards)
精选ppt
4
为什么要嵌入?
為何计算机要嵌入?
单片机PWM信号发生器的原理与设计

单片机PWM信号发生器的原理与设计引言在现代电子技术中,脉冲宽度调制(PWM)信号发生器被广泛应用于各种电路和系统中。
单片机作为常见的嵌入式系统解决方案,具备了成本低、功耗低、可编程性强等优势,因此被广泛用于PWM信号发生器设计中。
本文将介绍单片机PWM 信号发生器的原理与设计。
一、PWM信号发生器的原理1.1 脉冲宽度调制(PWM)概述脉冲宽度调制(PWM)是一种将模拟信号转换为数字信号的技术。
PWM信号由连续的短脉冲组成,其脉冲的宽度可以根据需要进行调整。
通过改变脉冲信号的宽度与周期之比,可以模拟出不同的模拟信号输出。
1.2 PWM信号发生器的基本原理PWM信号发生器的基本原理是通过控制脉冲的宽度和周期,实现对输出波形的精确控制。
单片机通常具有定时器模块,通过定时器模块的特定设置,可以生成精确的脉冲信号。
单片机还需要连接输出引脚,将生成的PWM信号输出给外部电路。
二、单片机PWM信号发生器的设计2.1 硬件设计单片机PWM信号发生器的硬件设计包括选择合适的单片机、外部电路连接和输出端口设计。
首先,选择适合的单片机。
考虑到PWM信号发生器需要高精度、可编程性强的特点,可以选择带有定时器模块的单片机。
常见的单片机型号有ATmega系列、PIC系列等。
根据实际需求选择合适的型号。
其次,进行外部电路连接。
通常需要连接电源、晶体振荡器以及输出端口。
电源提供电压稳定源,晶体振荡器提供时钟信号。
输出端口需要连接到PWM信号的目标设备上。
最后,进行输出端口设计。
根据实际需求确定输出端口的数量和类型。
常用的输出接口有GPIO、PWM输出等。
根据单片机型号和外部电路要求进行设计。
2.2 软件设计单片机PWM信号发生器的软件设计包括定时器设置和PWM生成代码编写。
首先,进行定时器设置。
根据单片机型号和需求,设置定时器的时钟源、分频系数、计数模式等参数。
通过合理的定时器设置,可以实现精确的脉冲宽度和周期控制。
其次,编写PWM生成代码。
嵌入式实验:PWM实验
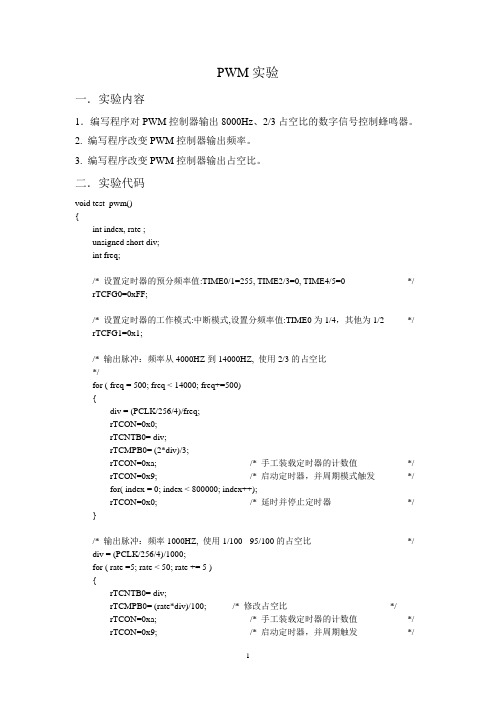
{
div = (PCLK/256/4)/freq;
rTCON=0x0;
rTCNTB0= div;
rTCMPB0= (2*div)/3;
rTCON=0xa;/*手工装载定时器的计数值*/
rTCON=0x9;/*启动定时器,并周期模式触发*/
三.实验结果及分析
分别改变频率和占空比,可得到以下结果:
1.freq=500;freq<14000;freq+=500;
rate=1;rate<100;rate+=5;
div=0x7,freq=0x1b58
图1-1
2.freq=4000;freq<14000;freq+=1000;
rate=1;rate<100;rate+=5;
div=0x4,freq=0x2ee0
图1-2
3.freq=4000;freq<14000;freq+=1000;
=5;rate<50;rate+=5;
div=0x6,freq=0x1f40
图1-3
4.freq=500;freq<14000;freq+=500;
rate=5;rate<50;rate+=5;
div=0x8,freq=0x1770
图1-4
四.实验体会
本次实验要求了解PWM的原理和应用及S3C2410X PWM模块的使用方法,由于在做实验前,老师已经给我们讲解了一些基本的原理,所以没花多长时间我们就知道本次实验的重点在哪了。实验过程中,我们通过分别改变频率和占空比来比较改变前后的变化,并得到了四个不同的截图。所以,总的来说,本次实验还是相当成功的。通过此次实验,我们不仅了解了本次实验的原理,即PWM的原理和应用,同时我们也学会了如何去分析实验的结果。
嵌入式PPT
推出了全新的STM32 F4系列高性能微控制器产品。作为STM32平台的新
产品,STM32 F4系列基于最新的ARM Cortex-M4内核,在现有的 STM32微控制器产品组合中新增了信号处理功能,并提高了运行速度。
STM32F407性能介绍
定时器、3个ADC、2 LQFP100、LQFP144、 个DAC、串行接口、 外存接口、实时时钟、 LQFP/BGA176 CRC计算单元和模拟 真随机数发生器 2个USB OTG接口;1 个支持MII和RMII的 10/100M以太网接口, 硬件支持IEEE1588 V2 协议;1个8-14位并行 相机接口
⑤ 使能ADC。
ADC_Cmd(ADC1, ENABLE);
⑥配置规则通道参数:
ADC_RegularChannelConfig(); ⑦开启软件转换:ADC_SoftwareStartConvCmd(ADC1);
⑧ 等待转换完成,读取ADC值。
ADC_GetConversionValue(ADC1);
H桥驱动电路
电机顺时针转 Q1,Q4截止 Q1,Q4导通 Q2,Q3截止 H桥驱动电路 电机逆时针转
Q2,Q3导通
通过对管的导通 控制电机转动
目录页
Contents Page
第一部分 第二部分 第三部分 第四部分
STM32F407介绍 定时器产生PWM以及H桥电路 霍尔传感器及AD采集 缓冲算法
就应用于智能电动轮椅等领域 ,关键在于电机的控制 必须灵活、实用、安全。 因此 ,在 H 桥电路和 PWM 的基础 上 ,针对两路电机设计了一套相应的算法策略 ,实现了良 好的控制效果。
缓冲算法的适用 情况
1) 两电机转向不变 ,二者可应用缓启动或缓制动
嵌入式pwm输出验原理
嵌入式pwm输出验原理嵌入式PWM输出验原理嵌入式系统中,PWM(Pulse Width Modulation)是一种常用的数字信号输出方式,用于控制各种电子设备的工作。
本文将介绍嵌入式PWM输出的原理和应用。
1. PWM输出原理PWM是一种周期性的方波信号,由高电平和低电平组成。
在嵌入式系统中,通过改变方波的高电平和低电平的时间比例,可以实现对输出信号的调节。
PWM输出原理主要包括两个方面:频率和占空比。
频率是指PWM信号的周期,即方波的一个完整周期所需要的时间。
频率越高,方波切换的速度越快,输出信号的精度越高。
在实际应用中,频率一般在几十Hz到几百kHz之间。
占空比是指PWM信号中高电平的时间占整个周期的比例。
占空比越大,高电平时间越长,输出信号的功率越大。
占空比的范围一般为0%到100%之间。
2. 嵌入式PWM输出的应用嵌入式PWM输出广泛应用于各种电子设备中,如电机控制、LED亮度调节、音频放大器等。
下面以电机控制为例,介绍嵌入式PWM输出的应用原理。
在电机控制中,PWM信号被用来控制电机的转速和转向。
通过改变PWM信号的频率和占空比,可以实现电机的正转、反转、停止等动作。
具体实现的原理是,将PWM信号输出到电机驱动芯片的控制引脚,控制引脚根据PWM信号的高低电平状态,控制电机的转速和转向。
当PWM信号为高电平时,电机正转;当PWM信号为低电平时,电机反转;当PWM信号为无电平时,电机停止。
通过改变PWM信号的频率和占空比,可以实现电机转速的精确控制。
例如,当PWM信号的频率较高,占空比较大时,电机转速较快;当PWM信号的频率较低,占空比较小时,电机转速较慢。
3. 嵌入式PWM输出的优势嵌入式PWM输出具有以下几个优势:3.1 精度高:通过改变PWM信号的频率和占空比,可以实现对输出信号精确控制,满足各种精度要求。
3.2 节能省电:PWM输出可以通过改变占空比来控制输出功率,实现节能省电的效果。
第09章PWM脉宽调制
0
0
0
0
0
0
0
通道7
通道6
......
通道 0
0 = 通道x禁止
1 = 通道x使能,下一个时钟开始输出PWM
软件示例
使能/禁止 PWM 通道: PWME5 = 1; // Enable PWM channel 5 PWME3 = 0; // Disable PWM channel 3 PWME = 0xFF // Enable all 8 PWM channels PWME = 0; // Disable all 8 PWM channels
PCLK1 —通道 1时钟选择 1 =时钟源为SA 0 =时钟源为A
PCLK0 —通道 0时钟选择 1 =时钟源为SA 0 =时钟源为A
PWM 极性选择寄存器------PWMPOL
PPOLx=0---输出周期以低电平开始 =1---输出周期以高电平开始
PWM 中心对齐使能寄存器------PWMCAE
Polarity 0 : Duty _ Cycle PWMPERx PWMDTYx 100% PWMPERx
Polarity 1: Duty _ Cycle PWMDTYx 100% PWMPERx
Clock=100ns
占空比=25%
周期=400ns
时钟源 选择= 10 MHz (100 ns period)
= Unimplemented or Reserved
紧急关断
外部故障输入 信号
通道 7输入紧急关断触发
PWMLVL=1
PWM7ENA=1 PWM7INL=1
Channel 6 Period and Duty Counter
PWMLVL=0
嵌入式系统PPTPPT课件

物联网与5G技术
嵌入式系统将与云计算和边缘计算技术结 合,实现数据处理和分析能力的提升。
物联网和5G通信技术的发展为嵌入式系统 提供了更广阔的应用空间,嵌入式系统将 更加网络化、智能化。
02 嵌入式系统硬件
微控制器
微控制器是嵌入式系统的核心,它是一 种集成电路芯片,包含了计算机的基本 组成要素,如中央处理器、存储器、输
嵌入式系统PPT课件
目录
CONTENTS
• 嵌入式系统概述 • 嵌入式系统硬件 • 嵌入式系统软件 • 嵌入式系统开发流程 • 嵌入式系统应用案例 • 嵌入式系统面临的挑战与解决方案
01 嵌入式系统概述
定义与特点
定义
嵌入式系统是一种专用的计算机系统 ,主要用于控制、监视或帮助操作机 器设备。
特点
嵌入式系统在智能家居控制系统中发 挥着核心作用,通过嵌入式处理器和 相关硬件设备,实现对家庭设备的控 制和管理。
智能家居控制系统可以实现的功能包 括:远程控制、定时控制、语音控制 等,为家庭生活带来便利和舒适。
工业自动化控制系统
工业自动化控制系统是嵌入式系统的另一个重要应用领域,通过嵌入式系统技术, 可以实现生产过程的自动化和智能化。
调研市场需求
了解行业发展趋势和市场需求,为系统设计提供参考 和依据。
制定开发计划
根据需求分析结果,制定详细的开发计划,包括时间 安排、人员分工、资源需求等。
系统设计
硬件设计
根据系统需求,设计合适的硬件架构,包括 处理器、存储器、接口电路等。
软件设计
设计嵌入式系统的软件架构,包括操作系统、 中间件和应用软件等。
01
02
03
系统集成
将硬件和软件集成在一起, 形成完整的嵌入式系统。
嵌入式pwm输出验原理
嵌入式pwm输出验原理
嵌入式系统中的PWM(脉冲宽度调制)输出验证是一种用来检查和确保PWM 输出的正确性和有效性的方法。
在嵌入式系统中,我们经常使用PWM信号来控制各种外部设备,例如电机或LED灯,以提供精确的脉冲信号。
验证PWM输出的原理是通过测量和分析PWM信号的周期、占空比和频率来确定其是否符合我们预期的规范和要求。
下面是一个简单易懂的PWM输出验证原理:1.周期验证:我们测量PWM信号一个完整周期的时间,确保它与我们期望的周
期相匹配。
可以使用计时器或外部计时器来帮助我们测量。
2.占空比验证:我们测量PWM信号中高电平(脉冲)的持续时间与一个完整周
期的时间之比,以计算占空比。
通过验证占空比是否与我们预期的数值相符,我们可以确定PWM信号的脉冲宽度控制是否准确。
3.频率验证:我们计算PWM信号的频率(周期的倒数),以验证它是否与我们
预期的频率相符。
频率可以通过测量周期来得出。
在嵌入式系统中,我们通常使用硬件计数器、定时器或输入捕获模块等特殊硬件资源来帮助我们实现PWM输出验证。
这些硬件资源可以帮助我们测量和分析PWM信号的各个参数,并将其与我们预期的数值进行比较。
在验证过程中,我们将测量结果与预期值进行比较,并根据需要进行调整和校准。
如果PWM输出与预期不符,我们可能需要检查软件配置、时钟设置、电源稳定性等方面的问题,以确保PWM输出的准确性和可靠性。
通过PWM输出验证,我们可以确保嵌入式系统中的PWM输出能够按照预期的方式控制外部设备,并且输出的脉冲信号满足所需的周期、占空比和频率要求。
这对于许多应用领域都是非常重要的,例如电机控制和光照调节等。
PWM原理及应用 呼吸灯
PWM原理及应用呼吸灯1. 引言在电子设备和嵌入式系统中,PWM(Pulse Width Modulation,脉宽调制)广泛应用于控制和调节信号。
它通过改变脉冲信号的脉宽来控制输出信号的平均电压值,从而实现对各种设备的精确控制。
其中一种常见的应用就是呼吸灯,它能够模拟人类的呼吸过程,给人一种柔和而温馨的感觉。
本文将介绍PWM的原理以及其在呼吸灯中的应用。
2. PWM原理PWM的原理是通过控制脉冲信号的占空比(即高电平和低电平的时间比)来控制输出信号的电压值。
一般来说,PWM信号的周期是固定的,而占空比可以任意调节。
通过改变占空比,可以实现输出信号的精确控制。
以呼吸灯为例,当占空比较大时,LED灯会亮起,而当占空比较小时,LED灯会变暗甚至熄灭。
通过不断改变占空比,PWM信号可以模拟出呼吸的效果。
3. 呼吸灯的实现在实际应用中,呼吸灯一般由以下几个步骤实现:3.1 初始化设置首先,需要将LED引脚配置为输出模式,并设置一个初始的占空比。
一般来说,初始占空比可以设置为较小的值,例如10%。
3.2 运行循环接下来,进入一个无限循环中。
在每次循环中,需要逐步增加或减小占空比,以实现呼吸灯的效果。
可以通过改变占空比的增量和时间间隔来调节呼吸的速度和幅度。
3.3 边界检测在改变占空比之前,需要检测当前的占空比是否已经接近边界。
如果已经接近边界,则需要改变增量的符号,以使占空比继续增加或减小。
3.4 更新LED状态在每次循环结束时,需要根据当前的占空比来更新LED的状态。
当占空比较大时,LED应该亮起;当占空比较小时,LED应该变暗或熄灭。
3.5 延时为了控制呼吸的速度,可以在每次循环结束时添加一个适当的延时。
延时的时间可以根据实际需求进行调整。
4. 示例代码以下是一个使用Arduino开发板实现呼吸灯效果的示例代码:const int ledPin = 9;int currentBrightness = 0;int brightnessIncrement = 5;void setup() {pinMode(ledPin, OUTPUT);}void loop() {currentBrightness += brightnessIncrement;if (currentBrightness >= 255 || currentBrightness <= 0) {brightnessIncrement = -brightnessIncrement;}analogWrite(ledPin, currentBrightness);delay(20);}5. 总结PWM是一种广泛应用于电子设备和嵌入式系统中的技术,它通过改变脉冲信号的占空比来控制输出信号的电压值。
OpenMV输出PWM占空比教科书般的指南让你成为控制大师

OpenMV输出PWM占空比教科书般的指南让你成为控制大师随着物联网技术的快速发展,对于嵌入式系统的需求也越来越高。
而PWM(Pulse Width Modulation,脉宽调制)作为一种常用的控制技术,在嵌入式系统中得到广泛应用。
本文将为你介绍OpenMV如何输出PWM占空比,并带你深入了解PWM的原理与应用。
一、PWM的原理与基本概念PWM是一种将模拟信号转换为数字信号的技术,在控制电机、LED亮度调节等领域表现出色。
它通过改变信号的脉冲宽度来控制输出的平均功率,从而达到对目标设备的精确控制。
PWM信号的两个重要参数是频率和占空比。
频率指的是每秒中PWM信号重复的次数,单位为赫兹(Hz)。
占空比则表示高电平存在的时间(宽度)与一个周期的比例。
例如,占空比为50%的PWM信号意味着高电平在一个周期中持续50%的时间。
二、OpenMV中PWM输出的配置OpenMV是一款基于MicroPython的嵌入式视觉开发板,具有强大的图像处理能力。
要在OpenMV上配置PWM输出,需要进行以下步骤:1. 初始化PWM对象:通过初始化函数创建一个PWM对象,指定PWM对应的引脚和相关参数,如频率和占空比。
2. 设置PWM占空比:使用`duty_cycle`方法设置PWM的占空比,范围一般为0-100。
可以根据实际需求调整占空比的大小。
3. 启动PWM:调用`enable`方法启动PWM输出,使其开始工作。
4. 停止PWM:如果需要停止PWM输出,可调用`disable`方法。
三、实例演示:OpenMV控制LED的亮度为了更好地理解和掌握OpenMV输出PWM占空比的方法,我们以控制LED的亮度为例进行演示。
假设我们将LED连接到OpenMV的引脚P2上。
首先,我们需要定义一个PWM对象,并初始化它:```pythonimport pybtim = pyb.Timer(4, freq=1000) # 创建一个计时器对象,频率为1000Hzch = tim.channel(3, pyb.Timer.PWM, pin=pyb.Pin("P2")) # 初始化PWM通道,引脚为P2```然后,我们可以通过设置`duty_cycle`方法来改变PWM的占空比,从而控制LED的亮度。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1.5 DMA请求模式
PWM 定时器能在任何时间产生一个DMA 请求。定时器保持DMA 请求信号为 低直到定时器接收到ACK 信号。当定时器接收到ACK 信号时,定时器将使请求信 号无效。产生DMA 请求的定时器由设置DMA 模式位(TCFG1)决定。如果一个 定时器配置成DMA 请求模式,则此定时器将不能产生中断请求,而其它定时器将 正常产生中断请求。
2.5 计数器1的计数寄存器、比较寄存器及观测寄存器(TCNTB1/TCMPB1/TCINT1)
退出
2.PWM的可编程寄存器
2.1. 定时器配置寄存器 0(TCFG0) 定时器输入时钟频率=PCLK/{预定标器的值+1}/分割器值 预定标器值=0~255; 分割器=2,4,8,16。
2.2 定时器配置寄存器 1(TCFG1)
2.3 控制寄存器
2.4 计数器0的计数寄存器、比较寄存器及观测寄存器(TCNTB0/TCMPB0/TCINT0)
(嵌入式系统课件)16PWM
1.2 可编程的占空比
脉宽调制功能可以通过改变 TCMPBn 的值实现。PWM 的频率由TCNTBn决定。 下图 是一个通过改变TCMPBn 的值实现PWM 的例子。
1.来实现TOUTn的反相。
1.4 死区发生器
这一功能使在一个开关器件关闭和另一个开关器件开启设置一个间隔时间。这 一时间间隔禁止了两个开关器件同时出于开启状态,即使是一段非常短的时间内。