推荐-CAN总线的自动调光系统设计 精品
基于CAN总线的智能照明控制系统软件设计方案
基于CAN总线的智能照明控制系统软件设计方案1.1 系统软件结构系统软件采用广泛流行的计算机高级语言C语言编写,它具有语言简洁、紧凑,生成目标代码质量高、程序执行效率高,容易阅读、具有很好的移植性,具有较强的结构性和便于模块化设计等优点。
在本系统软件设计中采用模块化的设计思想,按照系统的功能作用进行模块划分,再依次对各功能模块进行编程设计。
这样使系统在添加新功能时变得非常容易,在建立复杂应用和提高代码的可读性、可重复利用性方面也是非常有益的。
特别是在对后续的产品更新、程序维护、升级等有极其重要的意义。
本系统软件结构主要包括主节点软件结构和从节点软件结构两部分。
1.1.1 主节点软件结构主节点是整个CAN总线智能照明控制系统的核心单元,它管理了多达110个从节点灯设备,它要求具有强大的数据存储、运算处理能力和友好的人机界面。
因此,主节点的软件结构设计的好坏以及其程序模块的划分是否得当,将会直接地影响着整个照明控制系统的性能优劣。
因此,合理规划主节点的软件结构和模块划分是非常有意义的。
在本设计中,经过精心的设计规划,将主节点系统软件划分为七大模块,它们分别为:系统初始化模块、CAN协议模块、TFT液晶显示模块、SD卡驱动模块、UART驱动模块、触摸屏键盘扫描模块以及蜂鸣器驱动模块。
主节点软件结构如图1.1所示:图1.1 主节点软件结构1.1.2 从节点软件结构从节点是单个照明设备单元的控制中心,照明灯设备执行器的开关动作以及照明设备开关灯的时间长短完全取决于从节点的控制。
因此,照明设备是否正常工作直接取决于从节点的软件设计。
合理划分从节点的程序模块,能够有效提高软件的健壮性。
经过仔细思考后将从节点软件划分为六大模块,它们分别为:系统初始化模块、CAN协议模块、照明控制信号数据处理模块、键盘扫描及处理模块、照明灯定时控制模块以及LCD液晶显示模块。
从节点软件结构如图1.2所示:图1.2 从节点软件结构1.2 系统程序模块设计1.2.1 主节点程序模块设计由图1.1可知,主节点系统程序主要由七大模块构成,它们分别是:系统初始化模块、CAN协议模块、TFT液晶显示模块、SD卡驱动模块、UART驱动模块、触摸屏键盘扫描模块以及蜂鸣器驱动模块。
基于CAN总线的智能照明控制系统

一、产品介绍本产品开发的基于CAN总线的智能照明控制系统包括硬件控制和上位机软件控制两部分,其功能是根据上位机的给定值控制执行器。
系统的执行器通过可控硅控制电路提供均匀可调的输出电压以调节LED灯的亮度,上位机可以根据传感器感知外界光照度,判断此时的灯光亮度范围,再向控制器发送控制数据,使执行器按照设定的值调节灯光亮度,同时采用热释电传感器,由于其只对运动的人或物体敏感,利用它可以知道房间里是否有人,进而可以及时地将无人区的灯关掉,以免造成不必要的浪费。
该产品投资少、功能强、可靠性高、便于扩展,特别适合大型的智能办公大厦对灯光设备的控制需要。
本产品CAN总线控制器工作于多主方式,采用多主站依据优先权访问总线,支持主从或广播方式,最大网络节点110个,最大传输速率可达1Mbps,最远距离10km,具有极强的错误处理能力。
系统的上位机是PC机,利用PC机的多条扩展槽,利用局域网或者以太网等使得该系统很容易与其他部门联网,便于统一调度和管理。
系统特点:(1)采用总线式网络拓补;(2)CAN总线控制器工作于多主方式,采用多主站依据优先权访问总线,支持主从或广播方式;(3)CAN遵循ISO标准模式(4)信息传输采用CAN2.0B通信协议。
(5)可以和以太网结合,进行远程控制二、产品功能:(1)根据环境光照度智能调节LED光源亮度(2)可检测环境状态,根据有人无人控制灯的开关状态(3)通过智能的人机交互界面实现灯的亮度及其他参数的控制(4)可以反馈灯的状态,便于检修三、产品特点及优势:(1)集成CAN控制器的高速处理单片机(2)物理层传输介质灵活(3)点对点的通信方式以及广播发送方式能确保帧信息正确传输(4)CAN总线协议CAN2.0B协议(5)CAN控制器提供总线仲裁及错误检测功能(6)CAN收发器提供向总线的差动发送功能和对CAN控制器的差动接收功能。
(7)采用光电耦合是为将网络与系统内部隔离,以提高抗干扰能力。
基于can总线的智能照明控制系统

基于can总线的智能照明控制系统智能照明控制系统为现代化建筑楼宇照明提供了新途径,微机型灯光控制系统.它采用网络控制技术, 使得照明灯的电力线路可以不再经过控制室,而直接引顶棚或马道。
这种控制方法不仅可以方便地控制灯光的亮度, 还减少了电力线路及相应设施投资, 减少了灯回路的辐射干扰, 而且可以使灯回路采用母线方式布线,线路规整, 便于安装维修。
CAN 总线所需的完善的通信协议可由CAN控制器芯片和接口芯片实现, 大大降低了系统的开发难度、组成成本、缩短了开发周期。
CAN 总线简介CAN 是控制器局域网的简称,出现在80年代末,最早由德国osch公司提出,用于汽车内部测量与执行部件之间的数据通信。
CAN 属于现场总线的范畴, 是国际上应用最广泛的现场总线之一, 其总线规范己被ISO 国际标准化组织制定为国际标准。
CAN协议也是建立在ISO /OSI模型基础上,它采用了OSI底层的物理层、数据链路层和高层的应用层,其信号传输介质为双绞线。
最高通信速率为1Mbps (通信距离为40m,最远通信距离可达10km (通信速率为5kbp s), 节点总数可达110个。
具有实时性强、可靠性高、通信速率快、结构简单、互操作性好、总线协议具有完善的错误处理机制、灵活性高和价格低廉等特点.由于近几年来CAN总线技术逐步在我国推广开来, CAN 总线技术的独特特点。
传输数据的可靠性和实时性, 已获得国际自动化控制领域的认可,其应用前景十分光明, 国内推动CAN总线技术进步的应用事例不断扩展, 积极促进了我国自动化技术的进步.由于CAN总线本身的特点,其应用范围己经扩展到过程工业、机械工业、机器人、数控机床、医疗机械、家用电器及传感器等领域。
2照明控制系统的总体设计思想及结构框图系统设计从保证系统可靠性和降低成本, 并具有通用性、实时性和可扩展性等方面着手。
网络拓扑采用总线式结构, 这种结构比环型结构吞吐率低, 但结构简单、成本低, 且无源抽头连接, 系统可靠性高.CAN总线控制器工作于多主方式, 采用多主站依据优先权访问总线, 支持主从或广播方式,最大网络节点110个,最大传输速率1M bps,最远距离10km (也可以接CAN中继器增加距离,但通信速率会下降.(3) CAN遵循ISO标准模式。
基于CAN总线的智能照明控制系统设计
通信距离短 、 数据传输速度慢 、 误码率高 、 可靠性
差等 问题 , 因而迫 切 需 要在 照 明控 制 系统 中引 人 新技 术 , 研究 出新 方 案 以解 决 上述 问题 。 现场 总 线 是 当今 自动 化 领 域 技 术 发 展 的 热 点之 一 , 被誉 为 自动 化 领 域 的计 算 机 局域 网 。它
( )暂时错误 和永久性故障 的判别及故 障 9 节点 的 自动脱离 。
1 2 C N 总线 帧类 型 . A
信转换器与节点设计 的重要组 成部 分。下面主 要介绍通信转换器 、 节点硬件框图 、A C N接 口电 路 以及调 光 电路 的设 计 。
3 1 通 信转换 器硬 件设计 框 图 .
葛炎风 ( 96 ) 男 , 18 一 ,
硕 士 研 究 生 . 究 方 研
向 为建 筑 电 器 智 能 化
关键词 : A C N总线; 智能照明系统; 通信转换器; 节点; 调光模块
中 图 分 类 号 :… 85 文献 标 志 码 : ’ 5 B 文 章 编 号 :I7 —4 7 2 1 ) 1 0 0 648 1 (0 0 - 1-6 1 0 I
玛代建筑 气 圜
・
楼‘ 自动化 ・ j . =
No1、 l l ei I . o S i 2 a No I 2 II } 1 1
基于 C AN 总 线 的 智 能 照 明 控 制 系统 设 计 术
葛炎风 , 缪希 仁 , 林 苏斌 ( 州 大学 电 气工程 与 自动化 学 院 ,福 建 福 州 30 0 ) 福 5 18
( )多 主机 依据优 的仲裁 。 2
可靠 的数据通信提供 了强有力 的技术支持。本
文介 绍 的基 于 C N 总线 的 智 能 照 明 控 制 系 统 , A 传输 速度 快 , 靠 性 高 , 满 足 照 明控 制 系 统 的 可 可
基于CAN总线的汽车灯控网络系统的设计与实现

基于CAN总线的汽车灯控网络系统的设计与实现一、本文概述随着汽车行业的快速发展和汽车电子技术的不断进步,车辆内部的电子设备和系统日益复杂,对通信和控制的要求也越来越高。
CAN (Controller Area Network)总线作为一种高效、可靠且广泛应用于汽车内部通信的协议,其在车灯控制系统中的应用显得尤为重要。
本文旨在探讨基于CAN总线的汽车灯控网络系统的设计与实现,分析系统的架构、关键技术和实现方法,为提升汽车灯光系统的智能化和网络化水平提供理论支持和实践指导。
本文首先介绍了CAN总线的基本原理和特点,分析了其在汽车灯控系统中应用的可行性和优势。
随后,详细阐述了基于CAN总线的汽车灯控网络系统的设计过程,包括系统架构的搭建、硬件设备的选型与配置、软件编程与调试等方面。
同时,本文还深入探讨了CAN总线通信协议的实现方法,包括报文格式、传输机制、错误处理等方面的内容。
在实现部分,本文详细描述了汽车灯控网络系统的软件编程和硬件连接过程,包括CAN控制器的驱动开发、节点间的数据通信、灯光控制逻辑的实现等。
本文还对系统的稳定性和可靠性进行了测试和验证,以确保其在实际应用中的性能表现。
本文总结了基于CAN总线的汽车灯控网络系统的设计与实现过程中的经验教训,展望了未来可能的研究方向和应用前景。
通过本文的研究,旨在为汽车灯光系统的智能化和网络化提供有益的参考和借鉴。
二、CAN总线技术基础CAN(Controller Area Network)总线是一种为汽车内部通信而设计的串行通信协议,其全称是控制器局域网。
CAN总线技术以其高可靠性、低成本和灵活的数据传输方式,在汽车行业中得到了广泛应用。
CAN总线系统主要由两部分组成:硬件和软件。
硬件包括CAN控制器和CAN收发器,它们共同负责在物理层和数据链路层上实现数据的传输。
软件则主要负责实现应用层的功能,包括数据的封装、发送、接收和解析等。
多主工作方式:在总线空闲时,任何节点都可以发送消息,不存在主从之分,从而提高了系统的灵活性和实时性。
基于CAN总线的教室灯光自适应控制系统的设计
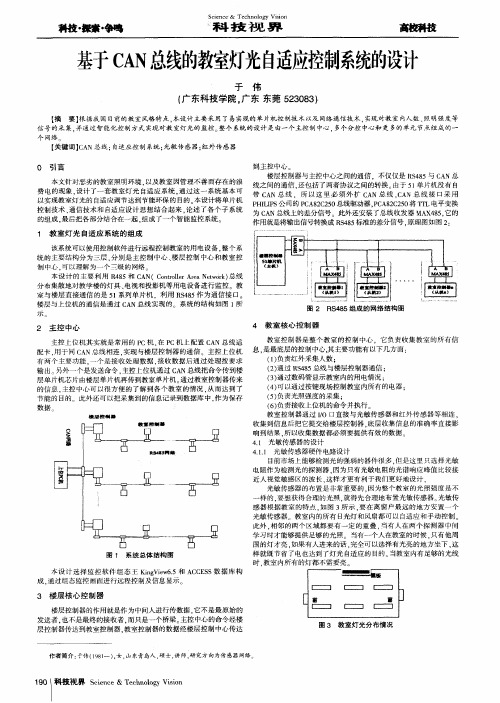
楼层控制器与主控中心之间的通信 .不仅仅是 R S 4 8 5与 C A N总 线之 间的通信 . 还包括了两者协议之 间的转换 。 由于 5 1 单 片机 没有 自 带 C A N总线 .所 以 里必 须 外 扩 C AN总 线 . C AN总线 接 口采用 P H 1 L I P S公司的 P C A8 2 C 2 5 0总线驱动器 . P C A 8 2 C 2 5 0将 . r r L电平 变换 为C A N总线上的差分信号 此外还安装 了总线收发器 MA X4 8 5 . 它 的
【 关键词 】 C A N总线 ; 自 适 应控制 系统 ; 光敏传感器 ; 红外传感器 0 引 言
本文针对恶劣 的教室照 明环境 . 以及教室因管理不善而存在的浪 费电的现象 , 设计 了一套教 室灯光 自适应系统 , 通过这一 系统基 本可 以实现教 室灯光 的 自适应调节达到节能环保的 目的。 本设计将单片机 控 制技术 、 通信技术和 自适应设计 思想结合起来 , 论述 了各个子 系统 的组成 , 最后把各部分结合在一起 , 组成 了一个 智能监控系统 。
1 教 室灯光 自适应 系统的组成
该系统可 以使用控制软件进行远程控制教 室的用 电设备 . 整个系 统 的主要 结构分为三层 . 分别是 主控制中心 、 楼层 控制 中心和教 室控 制中心 , 可 以理 解 为一 个 三 级 的 网络 。 本设计 的主要利 用 R 4 8 5和 C AN(C o n t r o l l e r A r e a Ne t w o r k ) 总 线 分 布集散地对教学楼 的灯具 、 电视和投影机等用电设 备进行监控 。教 室 与楼层 直接通信的是 5 1 系列单片机 ,利 用 R S 4 8 5作为通信 接 口。 楼层与上位机的通信是通过 C A N总线实现 的。系统 的结 构如图 1所
基于ARM的CAN总线智能照明控制系统设计毕业设计(论文)
广西科技大学毕业设计(论文)说明书课题名称基于CAN总线的智能照明控制系统设计摘要本设计是基于CAN总线的智能照明控制系统。
设计中采用主从节点组网设计方案,通过主节点与多个从节点之间的相互通信以实现对照明设备的远程实时监控。
主节点采用NXP公司生产的ARM7系列LPC2119微处理器和其内部集成的CAN控制器以及PCA82C250收发器设计出主节点硬件原理图,并制作出主节点硬件电路板。
从节点采用STC89C52单片机和SJA1000独立CAN控制器以及PCA82C250CAN总线收发器,设计出从节点硬件原理图并制作出2个从节点实验电路板。
通过将主从节点实验电路板挂接到网络构成一个一主多从的主从式照明控制局域网络。
利用该网络进行CAN总线照明控制系统理论研究和实验测试。
在本文中详细的介绍了CAN总线主从节点的软硬件设计原理、CAN总线通信原理、以及CAN总线应用层协议的制定,并采用SD卡存储技术、TFT彩屏显示技术、触摸屏技术等现实了友好的人机界面。
在TFT液晶显示方面是本设计的一大亮点,设计中模拟工业控制工艺流程图,对工艺中涉及的总线、灯设备、板卡等进行精心绘制显示。
使整个控制系统结构清晰、形象、逼真。
在输入设备方面是本设计的第二大亮点,本设计采用当前较为先进方便的触摸屏输入技术,为用户提供一个方便易捷的输入方式,以实现人机交互。
灯设备离线检测功能是本设计的又一大亮点,本设计采用定时询问方法,实现了从节点的离线检测功能。
总之,在本设计中,主节点实现了对多个从节点灯设备的远程设置和监控功能、离线检测功能、运行通信指示功能、实时更新显示功能等。
从节点具有独立设置、控制本节点灯设备的功能。
整体系统运行可靠,通信正常,不出现通信拥堵、死机等现象。
并开发出具有一定应用意义的系统软硬件,实现了照明灯设备的有效控制。
关键词: CAN总线;节点;照明控制;TFT;触摸屏技术;SD卡AbstractThe design is intelligent lighting control system . It’s based on CAN bus.In the design we use master and slave network node.By The main communication between the master node and multiple slave nodes to make the remote real-time monitoring of lighting equipment successful. The master node uses the ARM7 family NXP LPC2119 microprocessors and integrated to its internal CAN controller and PCA82C250 transceiver design hardware schematic diagram of the master node, and create the hardware circuit board of the master node.The salve node use STC89C52 microcontroller SJA1000 stand-alone CAN controller and PCA82C250CAN bus transceiver design from the node hardware schematic diagram and also create two nodes breadboard.By put the master and slave node experimental circuit board to the main network to constitute a main and some slaves lighting control local area network. U sing the network to research and experimental testing of the CAN bus lighting control system.In this paper a detailed introduction master and slave node of the CAN bus ,hardware and software design principles, the principle of CAN bus communication, the formulation of the CAN bus application layer protocol, SD card storage technology, TFT color display, touch screen technology and other practicalfriendly interface.The TFT LCD is one of the most wonderful of this design.In the design,we simulate industrial control process flow diagram of the bus involved in the process, light equipment, boards, carefully drawing display.And then make the control system more clear image and vivid. Advanced and convenient touch-screen input technology are the second highlights in the design.Because it apply a convenient input to the owners.The third highlights is that Light equipment offline detection. So We use from time to time ask, from the node offline detection.In short, in this design, the master node to multiple remote setup and monitoring functions of light equipment from the node offline detection, run communication indicator, updated in real time display.The slave node With independent settings, control the function of the lamp device of the node from the node. The overall system is reliable, normal communication, the communication congestion, crashes and so on. And develop system software and hardware with a certain significance of application to achieve effective control of the lighting equipment.Keyword: CAN bus;node;Lighting control;TFT;Touch screen technology;SD card目录摘要 (I)ABSTRACT (II)1 绪论 (1)1.1 课题背景 (1)1.2 现场总线的技术特点和现状 (1)1.3 课题的提出及意义 (2)2 系统设计 (3)2.1 设计要求 (3)2.2 总体设计方案 (3)2.2.1 设计思路 (3)2.2.2 方案论证与比较 (4)2.2.2.1 主控制器 (4)2.2.2.2 CAN控制器选择 (4)2.2.2.3 CAN收发器 (5)2.2.2.4 CAN通信电缆 (5)2.2.3 系统结构框图 (5)3 硬件设计 (7)3.1 系统硬件结构 (7)3.2 系统单元电路设计 (8)3.2.1 主节点单元电路设计 (8)3.2.1.1 ARM7最小系统设计 (8)3.2.1.2 TFT彩屏电路设计 (9)3.2.1.3 SD卡接口电路设计 (10)3.2.1.4 CAN总线电路设计 (10)3.2.1.5 蜂鸣器及ISP下载选择电路设计 (12)3.2.1.6 键盘电路设计 (13)3.2.1.7 电源电路设计 (13)3.2.1.8 串口通信电路设计 (14)3.2.2 从节点单元电路设计 (14)3.2.2.1 单片机最小系统设计 (14)3.2.2.2 液晶接口电路设计 (16)3.2.2.3 CAN总线电路设计 (18)3.2.2.4 键盘电路设计 (21)3.2.2.5 串口通信电路设计 (22)4 软件设计 (23)4.1 系统软件结构 (23)4.1.1 主节点软件结构 (23)4.1.2 从节点软件结构 (23)4.2 系统程序模块设计 (24)4.2.1 主节点程序模块设计 (24)4.2.1.1 初始化模块程序设计 (25)4.2.1.2 CAN协议模块设计 (27)4.2.1.3 TFT液晶显示模块设计 (31)4.2.1.4 触摸屏模块程序设计 (34)4.2.1.5 SD驱动模块设计 (35)4.2.1.6 串口驱动模块设计 (36)4.2.1.7 蜂鸣器驱动模块设计 (37)4.2.2 从节点程序模块设计 (38)4.2.2.1 初始化程序模块设计 (39)4.2.2.2 CAN协议模块设计 (40)4.2.2.3 照明信号数据处理模块设计 (41)4.2.2.4 键盘扫描及处理模块设计 (42)4.2.2.5 照明灯定时控制模块设计 (43)4.2.2.6 液晶显示模块设计 (44)5 系统测试 (46)5.1 测试准备 (46)5.1.1 测试条件 (46)5.1.2 硬件环境 (46)5.1.3 软件环境 (46)5.2 测试系统 (46)5.2.1 测试项目 (46)5.5.2 测试步骤 (47)5.2.3 测试结果 (48)6 结束语 (52)致谢 (53)参考文献 (54)附录1 基于CAN总线的智能照明控制系统原理图 (55)附录2 基于CAN总线的智能照明控制系统PCB板图 (56)附录3 基于CAN总线的智能照明控制系统程序清单 (1)1 绪论1.1 课题背景现场总线是用于现场仪表与控制系统和控制室之间的一种全分散、全数字化、智能、双向、互联、多变量、多点、多站的通信网络,它作为工业数据通信网络的基础,沟通了生产过程现场级控制设备之间及其更高控制管理层之间的联系。
基于以太网—CAN总线的LED灯光控制系统的设计
p g m d i c cnoeo V .s C i s vn ny ot l a b e o Wnok tlr BUe P , cnei t tcn o r r a n s o rl f d t o e l o r o s i L D n d a E e ead b . iflb p s r t C N s E s e y t n n A u i s h
L D的亮暗控制,而且比较方便地解决了L D多达 26 E E 5 级亮度的调节,大大简 化了单片机对数量较大的彩色 L D的亮度和色彩的控制。 E 3 A C N中继器的设计。 利用二片MC 21 和单片机 A 8C 2 P 50 T 9 5 设计了C N A 中继器电路和配套的单片机控制软件。
的新技 术。这 一技术是当今 自动化技术发展 的热点之 一。
现场总线是应用在生产现场、 在微机化测量控制设备 之间实 现双向串 行 多节点数字通信的协议,是新一代智能仪表的通信标准。 根据国际电工委员 会 ( C 标准和 I )的 E 现场总 线基金 会的定义: 现场总线是 “ 连接智能现场设备
o c lr r o . o
D s n A b ra. im d ue MC 2 I i C N s yt ae o 2 P 5O wt MC A 8C 2 ei o g f u e I s s f l s h U 9 5 t T o
dsn cc t N raa rav cn l a . eg t iu o A bs ,d te t s wr i h ri f e C u eyn e i o o o e l l t f
E e ead N . r g t s wris id in ad sii t r t C bs h uh o a ,ir le r e i n tn so h n n A uT o h f et az e v g r m sn e t e c a
基于CAN总线的电动汽车灯光控制系统设计

基于CAN总线的电动汽车灯光控制系统设计
基于CAN总线的电动汽车灯光控制系统设计
深入研究了CAN网络协议的技术规范,根据J1939应用层协议制订了相应的通信协议,设计了基于P87C591单片机的CAN总线灯光控制系统网络.试验结果表明,所设计的灯光控制系统局域网络运行状况良好,满足使用要求.
作者:郭俊飞李军伟郑玉英 GUO Jun-fei LI Jun-wei ZHENG Yu-ying 作者单位:郭俊飞,李军伟,GUO Jun-fei,LI Jun-wei(山东理工大学,交通与车辆工程学院,山东,淄博,255049)
郑玉英,ZHENG Yu-ying(福建经济学校,福建,福州,350007)
刊名:农业装备与车辆工程英文刊名:AGRICULTURAL EQUIPMENT & VEHICLE ENGINEERING 年,卷(期):2009 ""(3) 分类号:U463.65 TN915.04 关键词:P87C591单片机 CAN总线 CANoe。
基于CAN总线自适应车灯控制系统研究与设计分析

基于CAN总线自适应车灯控制系统研究与设计分析发布时间:2022-12-20T00:56:52.326Z 来源:《中国电业与能源》2022年第15期作者:李红[导读] 汽车照明系统是汽车的三大安全装置之一,李红上海艾格斯汽车配件有限公司 201518摘要:汽车照明系统是汽车的三大安全装置之一,同时也是汽车最重要的主动式安全装置,不仅能保证驾驶人员在夜间驾驶时依旧能够获得良好的视认特性,还能够保证其他车辆驾驶人员也能够获得足够的视认特性。
基于此,本文对CAN总线简介与特点进行简要分析,并探讨基于CAN总线的自适应车灯控制系统设计策略。
关键词:CAN总线;自适应车灯;控制系统引言:CAN总线属于一种串行式的数据通信总线,能够保证汽车在运行过程当中的安全性,以汽车的大灯为例,能够保证汽车整体安全运行。
而汽车前照灯的射光距离越远,则其配光特性更好,也就能够保证汽车行驶过程当中的安全性。
而汽车夜间行驶时照明问题往往是引起交通事故的关键原因,因此利用CAN总线设计车灯控制系统,能够有效提高汽车整体照明系统的质量,也就能够在很大程度上保证汽车安全性。
1.CAN总线简介与特点1.1CAN总线简介CAN总线最早是在1983年,由德国博世公司研发,目的就是为了解决在当前汽车开发过程当中所遇到的测量控制器之间产生的通信问题。
CAN2.0技术规范,则在1991年制定并公开颁布,包括A与B两个部分。
大部分汽车公司在制定单独的乘用车高速CAN通信协议,也基于CAN2.011898以及G2284的相关内容完成。
1.2CAN总线工作特点CAN总线的工作特征主要包括以下几点。
第一,多处控制在CAN总线保持空闲状态时,网络当中的各个节点均可独立发送消息。
第二,所有消息发送都拥有其固定的格式,而其发送优先级则是由标识符,也就是ID所确定。
第三,在CAN总线当中,所有节点并没有类似于所谓地址的属性。
如果CAN总线想要实现其他的功能,只需要直接添加相应的节点即可,而总线当中其他节点的软硬件以及应用层都不需要做相应的更改。
基于CAN总线的智能照明控制系统软件设计方案
基于CAN总线的智能照明控制系统软件设计方案1.1 系统软件结构系统软件采用广泛流行的计算机高级语言C语言编写,它具有语言简洁、紧凑,生成目标代码质量高、程序执行效率高,容易阅读、具有很好的移植性,具有较强的结构性和便于模块化设计等优点。
在本系统软件设计中采用模块化的设计思想,按照系统的功能作用进行模块划分,再依次对各功能模块进行编程设计。
这样使系统在添加新功能时变得非常容易,在建立复杂应用和提高代码的可读性、可重复利用性方面也是非常有益的。
特别是在对后续的产品更新、程序维护、升级等有极其重要的意义。
本系统软件结构主要包括主节点软件结构和从节点软件结构两部分。
1.1.1 主节点软件结构主节点是整个CAN总线智能照明控制系统的核心单元,它管理了多达110个从节点灯设备,它要求具有强大的数据存储、运算处理能力和友好的人机界面。
因此,主节点的软件结构设计的好坏以及其程序模块的划分是否得当,将会直接地影响着整个照明控制系统的性能优劣。
因此,合理规划主节点的软件结构和模块划分是非常有意义的。
在本设计中,经过精心的设计规划,将主节点系统软件划分为七大模块,它们分别为:系统初始化模块、CAN协议模块、TFT液晶显示模块、SD卡驱动模块、UART驱动模块、触摸屏键盘扫描模块以及蜂鸣器驱动模块。
主节点软件结构如图1.1所示:图1.1 主节点软件结构1.1.2 从节点软件结构从节点是单个照明设备单元的控制中心,照明灯设备执行器的开关动作以及照明设备开关灯的时间长短完全取决于从节点的控制。
因此,照明设备是否正常工作直接取决于从节点的软件设计。
合理划分从节点的程序模块,能够有效提高软件的健壮性。
经过仔细思考后将从节点软件划分为六大模块,它们分别为:系统初始化模块、CAN协议模块、照明控制信号数据处理模块、键盘扫描及处理模块、照明灯定时控制模块以及LCD液晶显示模块。
从节点软件结构如图1.2所示:图1.2 从节点软件结构1.2 系统程序模块设计1.2.1 主节点程序模块设计由图1.1可知,主节点系统程序主要由七大模块构成,它们分别是:系统初始化模块、CAN协议模块、TFT液晶显示模块、SD卡驱动模块、UART驱动模块、触摸屏键盘扫描模块以及蜂鸣器驱动模块。
基于CAN总线的智能照明控制系统的研究与设计
m t d w r ape t s w r ds f tg no ssm e os e ld o a eg o lhn c tl t , h e p i o t f e i n i i o r ye g i l i m ip cdrds d m n ao p cdrds n n u n a r eu ei a cm ui tn eu ei o c d g n o e g n o n ci r o e g f t cn oe ad m n ao p t of apc i l eo C N h ot lr n cm ui tn o l plao a r A e r l, o ci r c o o r itn f y
江 苏大学硕 士学位论 文
ssm s o C N s oue its ec nt poi yt b e n b irdcd h ppr o ol rv e e a d A u n t n a a i n n y d sib i mntn bt s e ee y h pne G e ual l i i , ao t nr wt r os t r n t e ao u l a h l u s v e g i e s o e
cn o ad n azd aae et I t m i cn o ro , ot l c t le m ngm n. h a ot l m r n e ri n e n r o
amn t t e f n a acm ot l ev om n v poe d isav s c c t f a e i n et rpr ir i t a r e o r b n r a e i a cni r i , aw i, ry v g n ah vd to T e of uao m n he ee s i c b ci e, . g tn e l n g a n a e e o h iei n cn oedt tev om n i mntn etr g ot n l et t lr c ni n et i i l l u h i tl g o rl e s r e l ao e ho l u v pc e c it ndc ; icm a t vl wt s pi ; l, l tc sue t n o pr h a e h o tf ay i er r a r h t e u i e n i l t e e t n
基于CAN总线的停车场智能灯光系统的软件设计

基于智能灯光系统的软件设计摘要CAN总线是现场总线的一种,它最初被应用于汽车的控制系统中。
由于其卓越的性能,CAN总线的应用范围已不再局限于汽车工业,被广泛应用到自动控制、楼宇自动化、医学设备等各个领域。
目前大部分停车场都需要大量的长期照明,采用传统的照明控制,且会造成巨大的能源浪费和设备损耗。
本文提出了一种基于CAN总线技术开发的分布式停车场灯光智能控制系统。
文中详细介绍了该智能控制系统的软件、硬件设计方法。
设计内容基于CAN总线的现场控制器进行了深入的研究,提出以单片机P89C52X2B和CAN控制SJA1000为核心,组成CAN总线的智能节点。
采用C语言对智能节点的初始化及发送和接收模块程序进行了编程,详细描述了控制器的软件实现细节以及在开发过程中的一些关键的技术问题及其解决方案。
该系统较好地解决了停车场内智能控制照明回路,降低停车场内的布线复杂度,减少安装费用,节省了能耗并大大延长停车场内照明设备的使用寿命,具有良好的应用前景。
关键词:CAN总线;照明;智能控制;P89C52X2BN;CJA1O00AbstractCAN bus is one kind of the Fieldbus, it is applied initially to the control system of the car. Because of its remarkable performance, the range of application of CAN bus has already been no longer confined to the auto industry, applied to each field such as automaticallying control, automation of the building, medical apparatus extensively.Most parking areas need the lighting for a long time of a large amount of at present, adopt the traditional illumination to control, and will cause the enormous energy to waste lossing with the apparatus. This text has proposed a kind of intelligent control system of the light of distributed parking area based on CAN bus technological development. Have introduced the software of this intelligent control system, hardware design method in the article in detail. Design the on-the-spot controller based on CAN bus of content to carry on deep research, propose controlling SJA1000 as the core with the one-chip computer P89C52X2B and CAN, make up the intellectual node of CAN bus. Adopt C language to the nodal initializing and sending and receiving the module procedure and carrying on programming of intelligence, have described the software of the controller realizes the detail and some key technological problems and solutions in the course of developing in detail.This system has solved the lighting return circuit of intellectual control at the parking area well, reduce the wiring complexity at the parking area, reduce the mounting cost, has saved energy consumption and lengthened the service life of the lighting apparatus at the parking area greatly, have good application prospects.Keywords:CAN bus;Illumination;Intelligent control;P89C52X2BN;CJA1000目录第一章绪论 (1)1.1课题背景 (1)1.2国内外研究现状 (1)1.3研究主要内容及结构 (1)第二章停车场灯光智能控制的原理说明 (3)2.1停车场灯光智能控制的基本原理 (3)2.2系统的CAN-bus布线及智能节点具体工作原理 (3)2.3本章小结 (5)第三章系统硬件设计 (6)3.1系统智能节点方案比较 (6)3.2系统智能节点的设计 (6)3.3 CAN适配卡 (12)3.4 CAN智能节点的外围硬件模块设计 (13)3.5 本章小结 (14)第四章系统软件设计 (15)4.1系统通讯程序设计 (15)4.2 CAN总线智能节点软件设计 (19)4.3现场可编程功能的实现 (29)4.4本章小结 (29)结束语 (30)致谢 (31)参考文献 (32)附录:英文翻译 (33)插图清单图2-1系统结构图 (3)图2-2车场内部CAN-bus布线及结构图 (4)图3-1 SJA1000的引脚及封装 (7)图3-2 PCA82C250引脚描述 (9)图3-3 89C52引脚 (10)图3-4 CAN总线系统智能节点硬件电路原理图 (12)图3-5开关量输入电路原理图 (13)图3-6电源原理图 (14)图4-1 CAN的分层结构 (15)图4-2 SJA1000初始化流程图 (17)图4-3 查询方式发送报文流程图 (18)图4-4查询方式接收报文流程图 (19)图4-5 CAN总线智能节点结构框图 (19)图4-6 SJA1000初始化流程图 (20)图4-7 CAN中断接收程序流程图 (22)图4-8 CAN发送程序流程图 (24)图4-9进出口节点程序流程图 (26)图4-10停车场内的智能节点程序流程图 (27)图4-11CAN232原理框图 (28)图4-12CAN适配器程序流程图 (28)表格清单表3-1管脚排列及功能说明 (7)表3-2 PCA82C250引脚功能说明 (9)表4-1各节点逻辑关系 (29)第一章绪论1.1课题背景随着工业测控技术和生产自动化技术的不断进步,传统的RS-232、RS-485和CCITTV.24通信技术已不能适应现代化的工业控制需要,而现场总线(Fieldbus)以其低廉的价格、可靠的性能而逐步成为新型的工业测控领域的通信技术。
基于CAN总线的智能照明系统的方案设计书和实现
智能照明控制系统是自动化技术在照明控制领域的应用和推广,它不仅是实现照明艺术性和舒适性的有效手段,而且迎合绿色照明的发展方向,是节约能源、缓解未来能源危机的有效措施,其发展前景非常广阔。
现场总线是连接现场设备和自动化系统的通信网络,具有全数字信号传输、控制功能分散、开放等特点。
CAN总线是现场总线之一,它具有可靠性高、价格低廉等优势,得到了广泛的应用。
本文设计了基于CAN总线的智能照明控制系统。
该系统是一种分布式的控制系统,既能分散控制又能集中管理,在中央控制室,管理人员可以通过合理的设置创造舒适的环境,同时又达到节约能源的效果。
智能控制器通过照度传感器测得周围环境的照度,与设定值比较从而调节光源的输出使光照度达到最合适的水平;控制器通过红外传感器探测是否有人,自动将无人区域的灯关闭。
本课题主要完成了以AT89C52为核心的CAN节点的硬件设计,包括数据采集模块的电路设计,执行器模块的电路设计以及网络通信部分电路设计。
在软件设计中利用模块化编程思想首先讨论了控制器实现控制功能的程序设计及控制器与物理总线通信功能的程序设计,并给出设计流程图,最后对通信的实现部分包括对信息的发送和接收做了详细的说明。
实验测试结果表明,本文提出的基于CAN总线的智能照明控制系统的方案是可行的,且系统的各个部分电路运行稳定可靠,满足设计功能和要求。
AbstractThe intelligent illumination control system is the application and popularity of automation technology. It is not only the effective realization methods of aesthetical and comforta ble light but also accordance with the “Green Illumination”and its direction of development that is an approval of saving energy and alleviating energy crisis, so that it has a promising brilliant prospect. Field-bus, a communication network for connecting equipments in field and automation system, has lots of prominent features such as totally digital transmission, distributed control function, opening system CAN-bus, which is one of Field-buses, has advantages in high real ability and low cost so as to it has been used largely in many fields.This paper introduced an intelligent lighting system based on CAN bus. The intelligent 关键词:CAN总线;智能照明;调光lighting system is a distributed control system, which can realize decentralized control andcentralized management. In the main control room, administrative staff can create a comfortable environment via proper configuration, meanwhile, energy saving can be achieved, too. The intelligent controller detects environment illumination level through optic electric transducer. Then it compares the value with set point. Finally, it adjusts output of light to expected level. Via infrared sensor, the controller will turn off light of void area automatically.This paper mainly introduced hardware design of CAN node based on AT89C52, including circuit design of data acquisition module (DAM), actuator module, and network communication. Block programming methods were applied to software design of lighting control system, including main procedure design and communication procedure design of the controller, and communication protocol for application layer of CAN bus was made, too.The experiment shows that the intelligent lighting control system based on CAN bus proposed in this paper is feasible, and each circuit of the system can be operated stable and reliable, which meets the designed function and requirements as well.Key Words:CAN bus, Intelligent lighting, Light-adjusting目录摘要.............................................................................................. 错误!未定义书签。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
南京邮电大学()开题报告
有的PWM口,通过程序来控制单片机输出占空比可调的高频脉冲,由此改变驱动电流,从而精确地调节LED亮度。
图1.执行电路总体框图
(3)CAN总线站点接口电路
在网络的层次结构中,数据链路层和物理层是保证通信质量至关重要、不可缺少的部分,也是网络协议中最复杂的部分。
CAN控制器就是扮演这个角色,CAN控制器是以一块可编程芯片上的逻辑电路的组合来完成实现这些功能。
此系统中CAN控制器选用PHILIPS公司生产的SJA1000.CAN接口驱动器选用PHILIPS公司生产的82C250。
图2.下位机CAN总线框图
CAN控制器SJA1000[4,8]
SJA1000 是一种独立控制器,用于移动目标和一般工业环境中的区域网络控制(CAN)。
SJA1000 在软件和引脚上都是与它的前一款PCA82C200 独立控制器兼容的在此基础上它增加了很多新的功能为了实现软件兼容SJA1000 增加修改了两种模式:BasicCAN 模式以及PeliCAN 模式,工作模式通过时钟分频寄存器中的CAN 模式位来选择,复位默认模式是Basic CAN 模式。
图3.CAN总线控制器SJA1000内部结构图
CAN驱动器82C250
CAN总线驱动器提供了CAN控制器与物理总线之间的接口,是影响网络性能的关键因素之一。
CAN总线驱动器可以提高总线驱动能力,增加通信抗干扰能力,并有效保护SJA1000免遭破坏。
系统中CAN总线驱动器82C250提供对总线的差动发送能力和对CAN控制器的差动接收能力,且其差分接受器共模抑制比宽,抗电磁干扰。
2.基于CAN总线自动调光系统软件设计
基于CAN总线的自动调光系统的软件系统由上层管理系统和现场控制系统部分组成,不过在此主要研究现场控制器部分的程序设计,主要包括控制功能及控制器与物理总线通信功能的程序设计。
设计时在考虑基本功能的前提下,也需要考虑程序功能的扩展新、可读性,同时要稳定可靠,便于维护。
四、进度安排
从工作开始起:
第1-2周,掌握无线能量的传输原理和单片机技术,结合设计目标,写出开题报告;
第3-7周,设计并分析无线供电的温度传感系统的组成部分关键技术;
第8-10周,搭建并调试无线供电的温度传感系统;
第11-13周,撰写报告,准备答辩;
第14周,答辩,按照答辩委员会意见修订。
参考文献
[1] .基于CAN总线的图书馆智能照明控制系统[J]. 建筑设计管理.20XX .2(1):89-91
[2] ,,. 基于CAN总线的智能照明控制系统设计[J]. 20XX, 2(1):11-16
[3] Eliadis, Constantine. Intelligent lighting system. Canadian Consulting Engineer. August/。