道路坐标计算程序表
小白自学ExcelVBA道路坐标高程计算程序流程汇编
小白自学ExcelVBA道路坐标高程计算程序流程1声明1.1 本人是个工作时间不长测量施工员。
1.2听说想轻松愉快的干好测量得学门编程,又听说ExcelVBA是个简单的可视化的常用的……1.3 本人很懒,面对厚厚的全是“昏天暗地”代码的ExcelVBA教科书籍,实在是没心没力。
其实俺还是懂点儿VB编程的(学校学过“=”是赋值,if、while、end的意思,嘿嘿,还有画窗体图框,其他的就都还给老师了)。
1.4 谷歌、度娘,是咱的好帮手。
1.5 仰望的存在,神一般的存在,无私的化身!道路中边桩坐标计算程序120424.xls(王中伟”教授”QQ:595077)曲线坐标计算程序VBA 4.6.xls(陈超”中铁”QQ:295188316)陈师傅的VBA代码乍一看感觉比王老师的让人头痛,怎么说咱们也是个有理想有目标的人,要啃就啃硬骨头!就选~~~嘿嘿~~~王老师的程序吧!1.6 道路中边桩坐标计算程序120424.xls代码获取。
王老师、陈师傅担心不懂编程的人,不小心修改代码导致程序错误,设置了vba密码(个人认为),其次我跟他们不熟,没有正大光明的要的密码,于是求助谷歌度娘,这个关于VBA 密码破解,于是很不厚道的得到了密码,为了方便本次学习,又很不厚道的把道路中边桩坐标计算程序120424.xls的密码贴出来(df750726),神人勿怪呀!2 代码理解ing…我们通过密码打开vba代码窗口,大家可以先把每个表格打开浏览一下代码,是不是感觉很短呀,感觉应该是超级链接的意思,嘿嘿,主要的代码在模块“lx”里,打开下,代码多吧,这就是咱们要肯的骨头。
现在咱们冲呀!2.1 第一段代码理解貌似第一段代码是定义的意思“定义π值”、'定义桩号点”、“'定义坡段”、“'定义基本曲线”①Public Const PI As Double = 3.14159265358979谷歌翻译:Public Const PI As Double公共常量PI 作为双精度浮点型百度百科:双精度浮点数双精度浮点数(Double)用来表示带有小数部分的实数,一般用于科学计算,用8个字节(64位)存储空间,其数值范围为1.7E-308~1.7E+308,双精度浮点数最多有15或16位十进制有效数字,双精度浮点数的指数用“D”或“d”表示。
公路逐桩坐标计算程序
2 )sinαAB +(
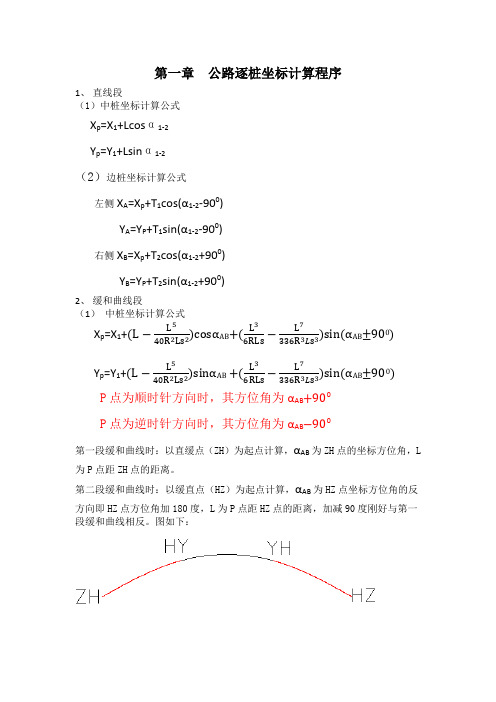
P 点为顺时针方向时,其方位角为 αAB+900 P 点为逆时针方向时,其方位角为 αAB−900
第一段缓和曲线时:以直缓点(ZH)为起点计算,αAB 为 ZH 点的坐标方位角,L 为 P 点距 ZH 点的距离。 第二段缓和曲线时:以缓直点(HZ)为起点计算,αAB 为 HZ 点坐标方位角的反 方向即 HZ 点方位角加 180 度,L 为 P 点距 HZ 点的距离,加减 90 度刚好与第一 段缓和曲线相反。图如下:
缓和曲线转角公式:β
=
L2
2RLs
(2) 边桩坐标计算公式
左侧
XA=XP+T1cos(αAB± β-900) YA=YP+T1sin(αAB± β-900)
右侧
XB=XP+T2cos(αAB± β+900) YB=YP+T2sin(αAB± β+900)
*第二段缓和曲线计算边桩坐标时, 注意加减 90 度时, 与第一段缓和曲线相反。
2、 缓和曲线段 (1) 中桩坐标计算公式
Xp=X1+(L − Yp=Y1+(L −
L5 40R 2 Ls L5 40R 2 Ls
2 )cosαAB+(
L3 6RLs L3 6RLs
− −
L7 336R 3 ������s 3 L7 336R 3 ������s 3
)sin(αAB±900) )sin(αAB±900)
右侧
XB=XP+T2cos(αAB± β+900) YB=YP+T2sin(αAB± β+900)
第二章
公路导线测量计算
1
公路导线测量为附合导线测量,按路线前进方向测量右角。β
工程测量坐标正反算通用程序(终极篇)
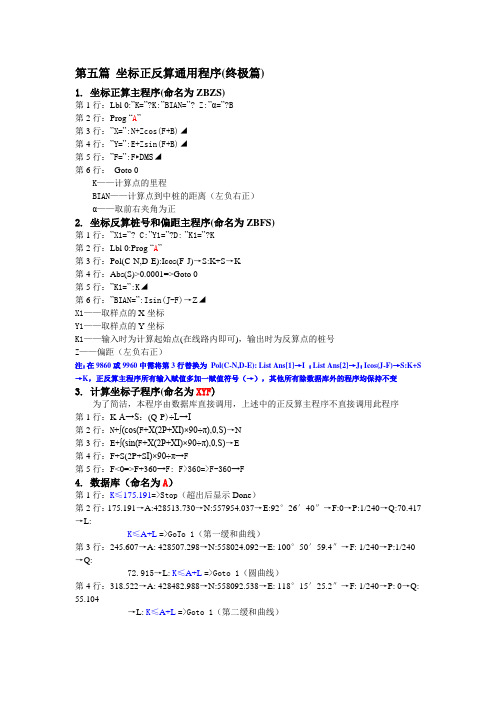
第五篇坐标正反算通用程序(终极篇)1. 坐标正算主程序(命名为ZBZS)第1行:Lbl 0:”K=”?K:”BIAN=”? Z:”α=”?B第2行:Prog “A”第3行:”X=”:N+Zcos(F+B)◢第4行:”Y=”:E+Zsin(F+B)◢第5行:”F=”:F►DMS◢第6行:Goto 0K——计算点的里程BIAN——计算点到中桩的距离(左负右正)α——取前右夹角为正2. 坐标反算桩号和偏距主程序(命名为ZBFS)第1行:”X1=”? C:”Y1=”?D:”K1=”?K第2行:Lbl 0:Prog “A”第3行:Pol(C-N,D-E):Icos(F-J)→S:K+S→K第4行:Abs(S)>0.0001=>Goto 0第5行:”K1=”:K◢第6行:”BIAN=”:Isin(J-F)→Z◢X1——取样点的X坐标Y1——取样点的Y坐标K1——输入时为计算起始点(在线路内即可),输出时为反算点的桩号Z——偏距(左负右正)注:在9860或9960中需将第3行替换为Pol(C-N,D-E): List Ans[1]→I :List Ans[2]→J:Icos(J-F)→S:K+S →K,正反算主程序所有输入赋值多加一赋值符号(→),其他所有除数据库外的程序均保持不变3. 计算坐标子程序(命名为XYF)为了简洁,本程序由数据库直接调用,上述中的正反算主程序不直接调用此程序第1行:K-A→S:(Q-P)÷L→I第2行:N+∫(cos(F+X(2P+XI)×90÷π),0,S)→N第3行:E+∫(sin(F+X(2P+XI)×90÷π),0,S)→E第4行:F+S(2P+S I)×90÷π→F第5行:F<0=>F+360→F: F>360=>F-360→F4. 数据库(命名为A)第1行:K≤175.191=>Stop(超出后显示Done)第2行:175.191→A:428513.730→N:557954.037→E:92°26′40″→F:0→P:1/240→Q:70.417→L:K≤A+L =>GoTo 1(第一缓和曲线)第3行:245.607→A: 428507.298→N:558024.092→E: 100°50′59.4″→F: 1/240→P:1/240→Q:72.915→L: K≤A+L =>Goto 1(圆曲线)第4行:318.522→A: 428482.988→N:558092.538→E: 118°15′25.2″→F: 1/240→P: 0→Q: 55.104→L: K≤A+L =>Goto 1(第二缓和曲线)第5行:373.627→A:428453.283→N:558138.912→E:124°50′4.5″→F:0→P:-1/180→Q:67.222→L:K≤A+L=>Goto 1:Stop(下一曲线的第一缓和曲线,示例为S型曲线,超出后显示Done)第6行:Lbl 1:Prog “XYF”A——曲线段起点的里程N——曲线段起点的x坐标E——曲线段起点的y坐标F——曲线段起点的坐标方位角P——曲线段起点的曲率(半径倒数,直线为0,左负右正)Q——曲线段终点的曲率(半径倒数,直线为0,左负右正)L——曲线段长度(尽量使用长度,为计算断链方便)说明:(1)正算主程序可以计算一般边桩的坐标,如要计算类似涵洞端墙的坐标需增加两个变量,具体方法参考本程序集中的第1篇辛普生公式的坐标计算通用程序(2)适用于任意线形:直线(0→P、0→Q)、圆曲线(圆半径倒数→P、圆半径倒数→Q)、缓和曲线(0或圆半径倒数→P、圆半径倒数或0→Q)、卵形曲线(接起点圆的半径倒数→P、接终点圆的半径倒数→Q),曲线左转多加一负号。
关于道路平曲线逐桩坐标的计算
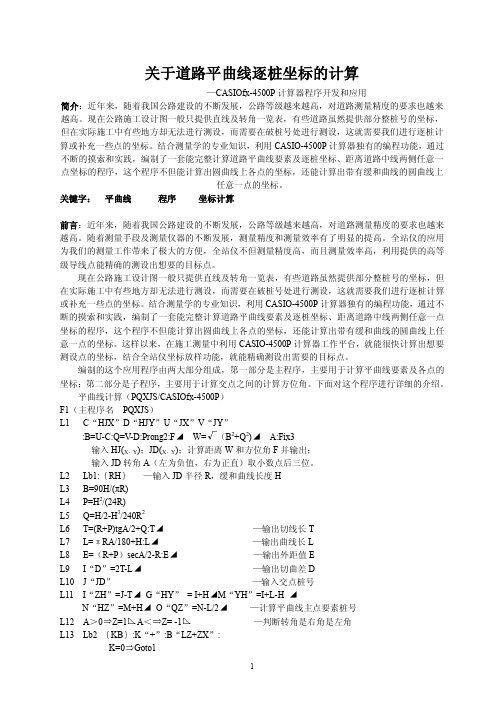
关于道路平曲线逐桩坐标的计算—CASIOfx-4500P计算器程序开发和应用简介:近年来,随着我国公路建设的不断发展,公路等级越来越高,对道路测量精度的要求也越来越高。
现在公路施工设计图一般只提供直线及转角一览表,有些道路虽然提供部分整桩号的坐标,但在实际施工中有些地方却无法进行测设,而需要在破桩号处进行测设,这就需要我们进行逐桩计算或补充一些点的坐标。
结合测量学的专业知识,利用CASIO-4500P计算器独有的编程功能,通过不断的摸索和实践,编制了一套能完整计算道路平曲线要素及逐桩坐标、距离道路中线两侧任意一点坐标的程序,这个程序不但能计算出圆曲线上各点的坐标,还能计算出带有缓和曲线的圆曲线上任意一点的坐标。
关键字:平曲线程序坐标计算前言:近年来,随着我国公路建设的不断发展,公路等级越来越高,对道路测量精度的要求也越来越高。
随着测量手段及测量仪器的不断发展,测量精度和测量效率有了明显的提高。
全站仪的应用为我们的测量工作带来了极大的方便,全站仪不但测量精度高,而且测量效率高,利用提供的高等级导线点能精确的测设出想要的目标点。
现在公路施工设计图一般只提供直线及转角一览表,有些道路虽然提供部分整桩号的坐标,但在实际施工中有些地方却无法进行测设,而需要在破桩号处进行测设,这就需要我们进行逐桩计算或补充一些点的坐标。
结合测量学的专业知识,利用CASIO-4500P计算器独有的编程功能,通过不断的摸索和实践,编制了一套能完整计算道路平曲线要素及逐桩坐标、距离道路中线两侧任意一点坐标的程序,这个程序不但能计算出圆曲线上各点的坐标,还能计算出带有缓和曲线的圆曲线上任意一点的坐标。
这样以来,在施工测量中利用CASIO-4500P计算器工作平台,就能很快计算出想要测设点的坐标,结合全站仪坐标放样功能,就能精确测设出需要的目标点。
编制的这个应用程序由两大部分组成,第一部分是主程序,主要用于计算平曲线要素及各点的坐标;第二部分是子程序,主要用于计算交点之间的计算方位角。
新版万能坐标计算公式(0-18(带斜交通涵放样程序)
说 明 书
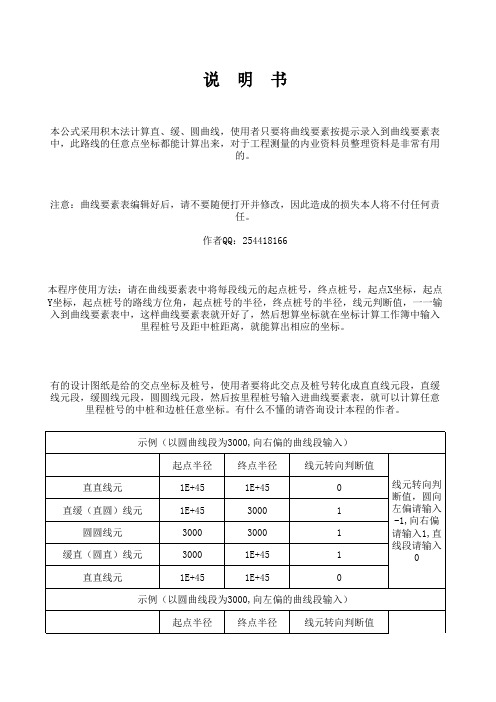
本公式采用积木法计算直、缓、圆曲线,使用者只要将曲线要素按提示录入到曲线要素表中,此路线的任意点坐标都能计算出来,对于工程测量的内业资料员整理资料是非常有用
的。
注意:曲线要素表编辑好后,请不要随便打开并修改,因此造成的损失本人将不付任何责
任。
作者QQ:254418166
本程序使用方法:请在曲线要素表中将每段线元的起点桩号,终点桩号,起点X坐标,起点Y坐标,起点桩号的路线方位角,起点桩号的半径,终点桩号的半径,线元判断值,一一输入到曲线要素表中,这样曲线要素表就开好了,然后想算坐标就在坐标计算工作簿中输入里程桩号及距中桩距离,就能算出相应的坐标。
有的设计图纸是给的交点坐标及桩号,使用者要将此交点及桩号转化成直直线元段,直缓线元段,缓圆线元段,圆圆线元段,然后按里程桩号输入进曲线要素表,就可以计算任意里程桩号的中桩和边桩任意坐标。
有什么不懂的请咨询设计本程的作者。
断值,圆向
左偏请输入
-1,向右偏
请输入1,直
本模板的里程桩号是从K0+000开始,到K18+000结束,半径如果是1E+45表示是直线段,表示半径无穷大。
坐标检查区域是对本段曲线元终点和下段曲线元的起点坐标复核,误差很大的时候请使用都仔细检查数据录入情况。
红色区域为公式区域,请不要去修改,绿色区域是使用者录入曲线要素区域。
坐标计算工作簿的第2已经隐藏,里面的作用是对你录入的里程桩号进行判断,若你要计算的里程桩号超出曲线要素表的范围,将会变成红色格子,
以示提醒。
密码:447290900。
用Excel程序快速计算公路工程逐桩坐标
用Excel程序快速计算公路工程逐桩坐标H现代公路IGHWAY用Excel程序快速计算公路工程逐桩坐标文/左卿引言在公路工程设计及施工过程中,逐桩坐标的计算是一项必不可少的工作,尤其近些年随着全站仪的普及使用,坐标放样法因速度快、精度高而被广泛应用,逐桩坐标计算的工程量也因此而大大增加。
例如:某高速公路某一合同段有20公里的路基,按照常规的设计及施工方法,不考虑曲线加桩,按每20m一个断面,每个断面左右幅2个点,那么需要计算1000个点2000个坐标。
如此大的计算量假如采用传统的计算器计算,不仅费时,还难免出错。
笔者从事多年施工工作,针对这一情况,利用Microsoft Office中的Excel电子表格的编程计算功能,设计了一套包括直线、缓和曲线和圆曲线的坐标计算程序,该计算程序具有快速、精确、程序简单、使用方便等优点,较其他编程软件编制的计算程序更灵活、更适用。
坐标计算直线段逐桩坐标首先介绍函数Value(MIDB(“ZH”,2,n)MIDB(“ZH”,n+3,7)),n表示公里数的位数,当里程公里数为1位数,那么n=1,当公里数为2位数,n=2,当里程公里数为3位数时,n=3……。
如ZH=K136+700,运行该函数,n=3,结果=136700,其目的为将K136+700文本数据(字符串)去掉“K”和“+”,并转换成数字格式。
那么里程≤ZH的前直线上任意桩号坐标计算:在Excel某一单元格中,坐标计算编辑公式为:X= Xj+(T+Value(MIDB (“ZH”,2,n)MIDB(“ZH”,n+3,7))-Value(MIDB(“K”,2,n)MIDB(“K”,n+3,7)))*cos((A1+180)*PI()/180)Y= Yj+(T+Value(MIDB(“ZH”,2,n)MIDB(“ZH”, n+3,7))-Value(MIDB(“K”,2,程序设计程序设计初步打开Microsoft Office Excel2022,新建工作表book1,并将其命名为“公路工程逐桩坐标计算表”。
直曲表1:常规交点法路线(坐标简单型)计算程序

48.043
35.000 45.000
41.006 46.497
12.454
10.469
K0+658.889
55°06′32.1″ (Z)
60.000
35
45.826 49.200 92.710 8.633 5.689 K0+757.890
56°24′47.4″ (Y)
0.000
110.710
252°23′01.5 ″
0.000
105.905
182°01′09.9 ″
0.000
97.926
126°54′37.8 ″
57.896
132.582
183°19′25.3 ″
16.459
65.185
228°22′32.4 ″
备注 21
编制:
复核:
审核:
图号:S2-4-1
83°41′31.1″ (Y)
35.000
31.344 51.125 11.984 11.564
20°23′37.7″ (Z)
199.358
35.000 45.000
83.532 94.716
53.880 57.946
110.959
3.545
0.867
K0+547.930
70°21′51.5″ (Z)
计算方位角
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
BP 3560468.929 421168.528
K0+000
JD1 3560034.969 421099.131 K0+439.474 JD2 3560043.396 420925.435 K0+601.810 JD3 3560009.891 420819.917 K0+711.653 JD4 3559904.051 420816.185 K0+807.090 JD5 3559845.240 420894.484 K0+899.326
计算器中的测量软件----道路之星操作手册 (1)
柃路园柃路园9860计算器与道路之星销售靠的是诚信与服务来经营店铺,店铺诚信服务、服务第一。
在本店铺购买后包教会道路之星安装与使用,并解决购买者任何测量问题,同时赠送各种常用软件及测量文件案例,并对新手及老手测量人员提供测量服务。
柃路园—(服务淘宝第一、价格淘宝最低)购买者请看准测量服务:网店网址:按住Ctrl并点击鼠标“柃路园—(淘宝网址)”以跟踪连接教程网址:按住Ctrl并点击鼠标“(道路之星软件视频讲解_道路之星软件使用教程 - )”以跟踪连接QQ测量服务群:128528455 电话138****4860基于Casio计算器的中文测量计算系统道路之星V1.22操作手册目录第一章概述- 1 - 第二章系统安装- 3 - 第一节电脑端程序- 3 - 第二节计算器与电脑交换数据- 5 - 第三节计算器程序- 7 - 第四节计算器程序基本操作- 11 - 第五节简易操作指南- 14 - 第三章常规计算- 16 - 第四章水准网记录及平差- 20 - 第五章控制测量记录与平差- 26 - 第六章道路测设- 30 - 第一节项目管理- 30 - 第二节道路正反算- 36 - 第三节路基路面控制- 44 - 第四节边坡计算- 49 - 第五节结构物及桥梁计算及检测- 53 - 第六节隧道超欠挖计算- 60 - 第七章计算器数据输入- 68 -道路之星用户手册第一章概述第一章概述一、功能和特点道路之星适用于公路、铁路、城市道路主线、立交匝道、隧道的勘测设计与施工放样工作。
软件分为两个部分:a.电脑端数据处理负责设计输入输出、设计成果的复核、现场采集数据的分析计算以及与计算器进行文件传输;b.计算器端施工现场计算基于Casio fx9750、fx9860、fxCG20计算器设计,负责现场的施工指导和相关数据的采集。
(一)、道路全线测设系统:将道路全线或一个标段所有数据一次性输入,主线、匝道可以存入一个文件,用路线名进行标识,一个项目文件可以包含任意多条路线。
道路中边桩坐标-简易说明V2.8

曲线’,缓圆点选‘圆曲线’,缓直点选‘直线’;
z 半径:指线路经过该点之后的曲率半径(线路终点除外),有正负之分,左转时为负,右
转时为正。一般情况下,线型和半径的输入可参照下表输入:(其中 R 表示圆曲线半径)
点类型 线路转向
线型
半径
左
-∞
ZH
缓和曲线
右
∞
左
-R
HY
圆曲线
右
R
左
-R
YH
缓和曲线
右
R
左
道路中边桩坐标(三维)计算程序简易说明 V2.8
该功能使得用户方便的将计算结果展绘到 CAD 当中。 基本设置: 路线——将整条路线输出; 逐桩——仅输出当前的逐桩计算结果; 中边线——只有选择输出路线时有效,0 表示中线,负值表示左边线,正值表示右边 线; 坐标顺序——用来解决测量坐标系和 CAD 坐标系 X、Y 轴颠倒问题; 标注设置: 方向——标注的指示线与线路前进方向的夹角; 偏移——标注指示线的长度; 字高——标注内容的文字高度; 复选框的内容只有勾选了才会标注出来,如果全部都不勾选,将不会添加标注。 保存后,会生成扩展名为“SCR”的 CAD 脚本文件,此时打开 Auto CAD,然后选 择菜单“工具”——“运行脚本(R)…”,选中并打开该脚本文件即可。
∞
HZ
直线
右
∞
左
-R
ZY
圆曲线
右
R
左
∞
YZ
直线
右∞Leabharlann 提示:有些情况下,设计部门并未提供主点的桩号、坐标信息,此时可通过本程序提供的辅
助工具进行解算,具体请参看本说明后面(6 辅助工具)的介绍。
2.1 添加/修改
道路之星1.21使用手册

基于Casio计算器的中文测量计算系统道路之星V1.22操作手册2013年8月目录第一章概述- 1 -第二章系统安装- 3 -第一节电脑端程序- 3 -第二节计算器与电脑交换数据- 5 -第三节计算器程序- 7 -第四节计算器程序基本操作- 11 -第五节简易操作指南- 14 - 第三章常规计算- 15 -第四章水准网记录及平差- 19 -第五章控制测量记录与平差- 25 -第六章道路测设- 29 - 第一节项目管理- 29 -第二节道路正反算- 35 -第三节路基路面控制- 43 -第四节边坡计算- 48 -第五节结构物及桥梁计算及检测- 52 -第六节隧道超欠挖计算- 59 - 第七章计算器数据输入- 67 -为了感谢广大测友长期以来对测工之家网(/)的支持,同时也是庆祝道路之星软件与本站合作顺利,凡在2014年1月28日之前通过测工之家网店/ ; 购买卡西欧FX-9860GII SD/FX-9750GII 编程计算器+认证版《道路之星》可以享受优惠,购买《道路之星》注册文件程序包(卡西欧计算器中文测量计算系统)享受优惠。
QQ744430266 欢迎咨询购买。
道路之星用户手册第一章概述第一章概述一、功能和特点道路之星适用于公路、铁路、城市道路主线、立交匝道、隧道的勘测设计与施工放样工作。
软件分为两个部分:a.电脑端数据处理负责设计输入输出、设计成果的复核、现场采集数据的分析计算以及与计算器进行文件传输;b.计算器端施工现场计算基于Casio fx9750、fx9860、fxCG20计算器设计,负责现场的施工指导和相关数据的采集。
(一)、道路全线测设系统:将道路全线或一个标段所有数据一次性输入,主线、匝道可以存入一个文件,用路线名进行标识,一个项目文件可以包含任意多条路线。
统一计算中边桩平面坐标及高程,进行一致的查询、放样等计算。
1、支持任意多级断链,支持任意道路断面形式。
2、平面。
支持点法或线元法,都可适用于对称或不对称基本形、S或C形、拱(凸)形、复曲线、卵形线、回头曲线等各种线形。
自动批量生成公路道路测量资料EXCELWPS表格水准测量平面放线
自动批量生成公路道路测量资料EXCELWPS表格水准测量平面放线暂无格式错误,但是第一段话中的“更高效更准确的功能操作”和“实用程序”有点重复,可以改为“提供了更高效、更准确的测量功能,让用户轻松完成各种记录表的制作。
该程序包含导线点、水准点、平曲线(线元法)、纵断面、横坡超高计算等多个功能,能够快速记录、录入和管理测量资料。
”测量资料的使用说明:1.导线点记录在导线点记录中,用户可以输入导线点的编号、坐标、高程等信息,方便后续的测量工作。
2.水准点记录水准点记录可以帮助用户记录水准点的编号、高程等信息,方便后续的测量和计算。
3.平曲线(线元法)计算平曲线计算是测量中常用的功能之一,用户可以输入起点、终点、曲线半径等信息,程序会自动计算出曲线的各项参数。
4.纵断面计算纵断面计算可以帮助用户计算出地形的高程变化情况,用户可以输入各个点的高程值,程序会自动绘制出纵断面图。
5.横坡超高计算横坡超高计算可以帮助用户计算出道路或铁路的横向高差,用户可以输入各个点的高程值和距离,程序会自动计算出横坡超高值。
总之,测量资料程序是一款功能强大、实用方便的测量工具,能够帮助用户快速记录、计算和管理测量资料,提高工作效率和准确性。
一)、功能特色该软件具有以下功能特色:1.支持多种数据格式的导入和导出,方便与其他软件进行数据交换。
2.提供了多种数据处理方法,包括平曲线、竖曲线、断链等,能够满足不同的测量需求。
3.可以自动生成水准点成果表、导线点成果表、原始数据表等多种报表,方便用户查看和使用。
4.提供了超高数据表和标准路面参数表等实用工具,方便用户进行道路设计和施工。
二)、平曲线平曲线是道路设计中常用的一种曲线类型,其特点是曲率变化平缓,适合用于大半径曲线的设计。
该软件提供了平曲线的自动计算功能,用户只需输入起点、终点和设计要求等参数,即可自动生成平曲线的坐标点和曲线参数。
为了保证计算精度,该软件还提供了多种平曲线计算方法,包括三点式、五点式、七点式等,用户可以根据实际情况选择不同的计算方法。
EXCEL快速计算任何难度的道路中线、边线坐标

EXCEL快速计算任何难度的道路中线、边线坐标主程序Public i As IntegerPublic pi As DoubleSub TP()Dim ii As IntegerDim k(1000) As DoubleDim xzq, yzq, kq, xzh, yzh, kzh, xjd, yjd, kjd, khy, kyh As Double'直线区域pi = 3.14159265358979xzq = 71862.642yzq = 63474.651kq = 0 '因为直线连接终点为ZH点,与圆曲线起点为同一点,所以在直线区域不定义ZH点参数'直线区域'曲线区域xzh = 71858.3267yzh = 63375.2684kzh = 99.4763xhz = 71909.3687yhz = 63283.8076 '曲线区域定义内容有:ZH(坐标、里程)、HZ(坐标、里程)、JD(坐标、里程)khz = 212.3392 'R(半径)、LS(缓和曲线长度)、HY(里程)、YH(里程)xjd = 71855.658yjd = 63313.806kjd = 160.9966ls = 30r = 75khy = 129.4763kyh = 182.3385'曲线区域i = 2 '从第二格开始读取数据所以定义I=2ii = 1 '桩号从第一个开始启用,所以定义II=2Dok(ii) = Workbooks("单交点平曲线.xls").Worksheets("sheet1").Cells(i, 1) '定义桩号等于读取数据If Workbooks("单交点平曲线.xls").Worksheets("sheet1").Cells(i, 1) = "" Then Exit Do '当没有数据读取时退出循环If k(ii) < kq Then '若计算点超过计算起点给予提示并退出程序MsgBox ("猪啊!!你的输入的桩号居然超过计算起点桩号")Exit SubElseIf k(ii) <= kzh Then '若计算点在ZH点前,则进入直线程序Call zx(xzq, yzq, kq, xzh, yzh, kzh, k(ii))ElseIf kzh < k(ii) And k(ii) <= khy Then '若计算点在ZH和HY之间则调入前段缓和曲线程序Call qhhqx(xzh, yzh, kzh, xhz, yhz, khz, xjd, yjd, kjd, ls, r, k(ii))ElseIf khy < k(ii) And k(ii) <= kyh Then '若计算点在HY和YH之间则调入圆曲线程序Call yqx(xzh, yzh, kzh, xhz, yhz, khz, xjd, yjd, kjd, ls, r, k(ii))ElseIf kyh < k(ii) And k(ii) <= khz Then '若计算点在YH和HZ之间则调入后段缓和曲线程序Call hhhqx(xzh, yzh, kzh, xhz, yhz, khz, xjd, yjd, kjd, ls, r, k(ii))ElseMsgBox ("笨啊!!数据已超出计算范围了") '若出现超出范围的桩号则给与提示并退出程序Exit SubEnd Ifi = i + 1ii = ii + 1LoopEnd Sub直线模块Sub zx(ByV al xzq As Double, ByV al yzq As Double, ByV al kq As Double, ByV al xzh As Double, ByV al yzh As Double, ByV al kzh As Double, ParamArray k())fw = fwj(xzh, xzq, yzh, yzq) '首先调入方位角程序计算直线方位角x = xzq + (k(ii) - kq) * Cos(fw) '然后根据桩号和长度计算出坐标值y = yzq + (k(ii) - kq) * Sin(fw)zdfm = dfm(fw) '将弧度形式的前进方位角转换度分秒形式'输出坐标值以弧度和度分秒形式的前进方位角Workbooks("单交点平曲线.xls").Worksheets("sheet1").Cells(i, 2) = xWorkbooks("单交点平曲线.xls").Worksheets("sheet1").Cells(i, 3) = yWorkbooks("单交点平曲线.xls").Worksheets("sheet1").Cells(i, 4) = fwWorkbooks("单交点平曲线.xls").Worksheets("sheet1").Cells(i, 5) = zdfmEnd Sub圆曲线模块Sub yqx(ByV al xzh As Double, ByV al yzh As Double, ByV al kzh As Double, ByV al xhz As Double, ByV al yhz As Double, ByV al khz As Double, ByV al xjd As Double, ByV al yjd As Double, ByV al kjd As Double, ByV al ls As Double, ByV al r As Double, ParamArray k())l = Abs(k(ii) - kzh) '计算ZH点(因为以直缓点起算)到待求桩号的弧度长度ly = l - ls / 2 '计算圆弧长度p = ls ^ 2 / 24 / r - ls ^ 4 / 2688 / r ^ 3 '曲线内移值m = ls / 2 - ls ^ 3 / 240 / r ^ 2 '曲线切线长增量u = r * Sin(ly / r) + m '偏量坐标计算v = r * (1 - Cos(ly / r)) + p'调入方位角fwq = fwj(xjd, xzh, yjd, yzh) '计算ZH点方位角fwh = fwj(xhz, xjd, yhz, yjd) '计算HZ点方位角(此角作用是用来推算曲线是左偏还是右偏)'调入偏角判定nq = n(fwq, fwh) '计算偏角方向,左偏为-1右偏为1'计算坐标x = u * Cos(fwq) - nq * v * Sin(fwq) + xzhy = u * Sin(fwq) + nq * v * Cos(fwq) + yzhd = (90 * (2 * l - ls) / pi / r) * pi / 180 '计算圆曲线上的偏角(此句要点为角度必须转换为弧度即:pi/180)fw = fwq + d * nq '计算前进方位角zdfm = dfm(fw) '将弧度形式的前进方位角转换度分秒形式'输出坐标值以弧度和度分秒形式的前进方位角Workbooks("单交点平曲线.xls").Worksheets("sheet1").Cells(i, 2) = xWorkbooks("单交点平曲线.xls").Worksheets("sheet1").Cells(i, 3) = yWorkbooks("单交点平曲线.xls").Worksheets("sheet1").Cells(i, 4) = fwWorkbooks("单交点平曲线.xls").Worksheets("sheet1").Cells(i, 5) = zdfmEnd Sub前缓和段Sub qhhqx(ByV al xzh As Double, ByV al yzh As Double, ByV al kzh As Double, ByV al xhz As Double, ByV al yhz As Double, ByV al khz As Double, ByV al xjd As Double, ByV al yjd As Double, ByV al kjd As Double, ByV al ls As Double, ByV al r As Double, ParamArray k())l = Abs(k(ii) - kzh) '计算测点到ZH点的距离u = l - l ^ 5 / 40 / r ^ 2 / ls ^ 2 + l ^ 9 / r ^ 4 / ls ^ 4 / 3456 '计算偏量v = l ^ 3 / 6 / r / ls - l ^ 7 / 336 / r ^ 3 / ls ^ 3'用公式二则以下两计算可省略(圆曲线和后缓和曲线也同理)Rem t = Atn(v / u)Rem s = Sqr(u ^ 2 + v ^ 2)'调入方位角计算fwq = fwj(xjd, xzh, yjd, yzh) '计算ZH点方位角fwh = fwj(xhz, xjd, yhz, yjd) '计算HZ点方位角(此角作用是用来推算曲线是左偏还是右偏)'调入偏角判定nq = n(fwq, fwh) '计算偏角方向,左偏为-1右偏为1'结果计算Rem x = xzh + s * Cos(fwq + nq * t)Rem y = yzh + s * Sin(fwq + nq * t)x = u * Cos(fwq) - nq * v * Sin(fwq) + xzh '经过测试,计算结果中的两种公式计算结果是一样的y = u * Sin(fwq) + nq * v * Cos(fwq) + yzhd = (90 * l * l / pi / r / ls) * pi / 180 '计算缓和曲线上的偏角(此句要点为角度必须转换为弧度即:pi/180)fw = fwq + d * nq '计算前进方位角zdfm = dfm(fw) '将弧度形式的前进方位角转换度分秒形式'输出坐标值以弧度和度分秒形式的前进方位角Workbooks("单交点平曲线.xls").Worksheets("sheet1").Cells(i, 2) = xWorkbooks("单交点平曲线.xls").Worksheets("sheet1").Cells(i, 3) = yWorkbooks("单交点平曲线.xls").Worksheets("sheet1").Cells(i, 4) = fwWorkbooks("单交点平曲线.xls").Worksheets("sheet1").Cells(i, 5) = zdfmEnd Sub后缓和段模块Sub hhhqx(ByV al xzh As Double, ByV al yzh As Double, ByV al kzh As Double, ByV al xhz As Double, ByV al yhz As Double, ByV al khz As Double, ByV al xjd As Double, ByV al yjd As Double, ByV al kjd As Double, ByV al ls As Double, ByV al r As Double, ParamArray k())l = Abs(k(ii) - khz) '计算测点到HZ点的距离(后缓和曲线是以HZ点为起点)u = l - l ^ 5 / 40 / r ^ 2 / ls ^ 2 + l ^ 9 / r ^ 4 / ls ^ 4 / 3456 '计算偏量v = l ^ 3 / 6 / r / ls - l ^ 7 / 336 / r ^ 3 / ls ^ 3Rem t = Atn(v / u)Rem s = Sqr(u ^ 2 + v ^ 2)'调入方位角计算fwq = fwj(xjd, xzh, yjd, yzh) '计算ZH点方位角fwh = fwj(xhz, xjd, yhz, yjd) '计算HZ点方位角(此角作用是用来推算曲线是左偏还是右偏)'调入偏角判定nh = n(fwh, fwq) '计算偏角方向,左偏为-1右偏为1(注意:因为是从后HZ点起算,所以必须将HZ点方位角放在前ZH放在后)'结果计算Rem x = xzh + s * Cos(fwq + nq * t)Rem y = yzh + s * Sin(fwq + nq * t)x = xhz - (u * Cos(fwh) - nh * v * Sin(fwh)) '经过测试,计算结果中的两种公式计算结果是一样的y = yhz - (u * Sin(fwh) + nh * v * Cos(fwh))d = (90 * l * l / pi / r / ls) * pi / 180 '计算缓和曲线上的偏角(此句要点为角度必须转换为弧度即:pi/180)fw = fwh + d * nh '计算前进方位角zdfm = dfm(fw) '将弧度形式的前进方位角转换度分秒形式'输出坐标值以弧度和度分秒形式的前进方位角Workbooks("单交点平曲线.xls").Worksheets("sheet1").Cells(i, 2) = xWorkbooks("单交点平曲线.xls").Worksheets("sheet1").Cells(i, 3) = yWorkbooks("单交点平曲线.xls").Worksheets("sheet1").Cells(i, 4) = fwWorkbooks("单交点平曲线.xls").Worksheets("sheet1").Cells(i, 5) = zdfmEnd Sub偏角模块Function n(ByV al fw1 As Double, ByV al fw2 As Double) As Doublepj = fw1 + pi - fw2 '前进的右角pjIf pj - pi > 0 Then '当右角pj-pi 〉0时为左偏否则为右偏n = -1Else: n = 1End IfEnd Function方位角模块Function fwj(ByV al x1 As Double, ByV al x2 As Double, ByV al y1 As Double, ByV al y2 As Double) As Double'计算增量x0 = x1 - x2y0 = y1 - y2'由增量判断方位角所在象限,不同象限取不同的值If x0 = 0 And y0 > 0 Thenfwj = pi / 2 '当在大地坐标中偏量在X轴上的值时ElseIf x0 = 0 And y0 < 0 Thenfwj = 3 * pi / 2 '当在大地坐标中偏量在负X轴上的值时ElseIf x0 < 0 Thenfwj = Atn(y0 / x0) + pi '当在大地坐标中偏量在第二第三象限上的值时ElseIf x0 > 0 And y0 < 0 Thenfwj = Atn(y0 / x0) + 2 * pi '当在大地坐标中偏量在第四象限上的值时Elsefwj = Atn(y0 / x0) '当在大地坐标中偏量在第一象限上的值时End IfEnd Function度分秒模块Function dfm(ByV al ao As Double) As V ariantao = ao * 180 / pi '将弧度转化为度jd = Int(ao) '计算度jf = Int(ao * 60 - jd * 60) '计算分jmx = (ao - jd - jf / 60) * 3600 '计算秒jm = Left(jmx, 8) '因为拆分出来的秒数经常占到十多位,所以只取秒数的前八位dfm = jd & "°" & jf & "′" & jm & "″" '连接度分秒End Function边桩公式(此公式在电子表格中直接输入):=B2+J2*COS(D2+RADIANS(L2)+PI()) =C2+J2*SIN(D2+RADIANS(L2)+PI()) =B2+K2*COS(D2+RADIANS(M2)) =C2+K2*SIN(D2+RADIANS(M2))=B3+J3*COS(D3+RADIANS(L3)+PI()) =C3+J3*SIN(D3+RADIANS(L3)+PI()) =B3+K3*COS(D3+RADIANS(M3)) =C3+K3*SIN(D3+RADIANS(M3))=B4+J4*COS(D4+RADIANS(L4)+PI()) =C4+J4*SIN(D4+RADIANS(L4)+PI()) =B4+K4*COS(D4+RADIANS(M4)) =C4+K4*SIN(D4+RADIANS(M4))=B5+J5*COS(D5+RADIANS(L5)+PI()) =C5+J5*SIN(D5+RADIANS(L5)+PI()) =B5+K5*COS(D5+RADIANS(M5)) =C5+K5*SIN(D5+RADIANS(M5))=B6+J6*COS(D6+RADIANS(L6)+PI()) =C6+J6*SIN(D6+RADIANS(L6)+PI()) =B6+K6*COS(D6+RADIANS(M6)) =C6+K6*SIN(D6+RADIANS(M6))=B7+J7*COS(D7+RADIANS(L7)+PI()) =C7+J7*SIN(D7+RADIANS(L7)+PI()) =B7+K7*COS(D7+RADIANS(M7)) =C7+K7*SIN(D7+RADIANS(M7))=B8+J8*COS(D8+RADIANS(L8)+PI()) =C8+J8*SIN(D8+RADIANS(L8)+PI()) =B8+K8*COS(D8+RADIANS(M8)) =C8+K8*SIN(D8+RADIANS(M8))=B9+J9*COS(D9+RADIANS(L9)+PI()) =C9+J9*SIN(D9+RADIANS(L9)+PI()) =B9+K9*COS(D9+RADIANS(M9)) =C9+K9*SIN(D9+RADIANS(M9))=B10+J10*COS(D10+RADIANS(L10)+PI()) =C10+J10*SIN(D10+RADIANS(L10)+PI()) =B10+K10*COS(D10+RADIANS(M10)) =C10+K10*SIN(D10+RADIANS(M10))=B11+J11*COS(D11+RADIANS(L11)+PI()) =C11+J11*SIN(D11+RADIANS(L11)+PI()) =B11+K11*COS(D11+RADIANS(M11)) =C11+K11*SIN(D11+RADIANS(M11))=B12+J12*COS(D12+RADIANS(L12)+PI()) =C12+J12*SIN(D12+RADIANS(L12)+PI()) =B12+K12*COS(D12+RADIANS(M12)) =C12+K12*SIN(D12+RADIANS(M12))=B13+J13*COS(D13+RADIANS(L13)+PI()) =C13+J13*SIN(D13+RADIANS(L13)+PI()) =B13+K13*COS(D13+RADIANS(M13)) =C13+K13*SIN(D13+RADIANS(M13))=B14+J14*COS(D14+RADIANS(L14)+PI()) =C14+J14*SIN(D14+RADIANS(L14)+PI()) =B14+K14*COS(D14+RADIANS(M14)) =C14+K14*SIN(D14+RADIANS(M14))=B15+J15*COS(D15+RADIANS(L15)+PI()) =C15+J15*SIN(D15+RADIANS(L15)+PI()) =B15+K15*COS(D15+RADIANS(M15)) =C15+K15*SIN(D15+RADIANS(M15))=B16+J16*COS(D16+RADIANS(L16)+PI()) =C16+J16*SIN(D16+RADIANS(L16)+PI()) =B16+K16*COS(D16+RADIANS(M16)) =C16+K16*SIN(D16+RADIANS(M16))=B17+J17*COS(D17+RADIANS(L17)+PI()) =C17+J17*SIN(D17+RADIANS(L17)+PI()) =B17+K17*COS(D17+RADIANS(M17)) =C17+K17*SIN(D17+RADIANS(M17))=B18+J18*COS(D18+RADIANS(L18)+PI()) =C18+J18*SIN(D18+RADIANS(L18)+PI()) =B18+K18*COS(D18+RADIANS(M18)) =C18+K18*SIN(D18+RADIANS(M18))=B19+J19*COS(D19+RADIANS(L19)+PI()) =C19+J19*SIN(D19+RADIANS(L19)+PI()) =B19+K19*COS(D19+RADIANS(M19)) =C19+K19*SIN(D19+RADIANS(M19))=B20+J20*COS(D20+RADIANS(L20)+PI()) =C20+J20*SIN(D20+RADIANS(L20)+PI()) =B20+K20*COS(D20+RADIANS(M20)) =C20+K20*SIN(D20+RADIANS(M20))=B21+J21*COS(D21+RADIANS(L21)+PI()) =C21+J21*SIN(D21+RADIANS(L21)+PI()) =B21+K21*COS(D21+RADIANS(M21)) =C21+K21*SIN(D21+RADIANS(M21))=B22+J22*COS(D22+RADIANS(L22)+PI()) =C22+J22*SIN(D22+RADIANS(L22)+PI()) =B22+K22*COS(D22+RADIANS(M22)) =C22+K22*SIN(D22+RADIANS(M22))=B23+J23*COS(D23+RADIANS(L23)+PI()) =C23+J23*SIN(D23+RADIANS(L23)+PI()) =B23+K23*COS(D23+RADIANS(M23)) =C23+K23*SIN(D23+RADIANS(M23))呵呵,这个就是传说已久的EXCEL自动计算曲线坐标.给大家研究研究.欢迎在此基础上开发增加新模块。
卡西欧5800公路坐标正反算程序

卡西欧5800公路坐标正反算程序(总19页)-CAL-FENGHAI.-(YICAI)-Company One1-CAL-本页仅作为文档封面,使用请直接删除目录一、坐标正算基本公式 (02)二、坐标反算原理 (04)三、高程数据库录入变换 (05)四、计算器程序 (07)01、ZBZS(坐标正算) (07)02、ZBFS(坐标反算) (08)03、GCJF(高程积分) (09)04、PJFY(坡脚放样) (10)05、JFCX(积分程序) (11)06、ZBFY(坐标放样) (11)07、DT(递推) (12)08、HP(横坡) (13)09、LK(路宽) (14)10、SJK1(平面数据库) (14)11、SJK2(纵面数据库) (14)12、SJK3(左路宽度数据库) (15)13、SJK4(右路宽度数据库) (15)14、SJK5(横坡数据库) (16)15、SJK6(下边坡数据库) (16)16、SJK7(左上边坡数据库) (17)17、SJK8(右上边坡数据库) (18)五、后记 (19)CASIO 5800计算器公路工程测量程序一、正算所涉及的计算公式 X R i d XαβBd Y d l d βI图表 1在图1中,A 点为回旋曲线起点,B 点为回旋曲线止点,I 点为所求坐标点。
设:A 点的X 坐标为X A ,Y 坐标为Y A ,A 点的切线方位角为α,A 点的曲率为ρA ,A 点的里程为L A ,B 点的曲率为ρB ,B 点的里程为L B ,I 点的曲率为ρI ,I 点的里程为L I 。
I 点的切线角为β。
由于回旋线上各点曲率半径R i 和该点至曲线起点的距离L 成反比。
故此任意点的曲率为;CL R i i ==1ρ (c 为常数) (1) 由式(1)可知,回旋曲线任意点的曲率按线性变化,由此回旋曲线上里程为L i 点的曲率为;AB A i A B A i L L L L --⨯-+=)(ρρρρ (2) 当曲线右偏时ρB 、ρA 取正值,反之取负值。
自动批量生成公路道路测量资料EXCELWPS表格水准测量平面放线

测量资料使用说明测量资料程序是一款简单实用的测量程序,为用户提供了一个更高效更准确的功能操作,帮助用户轻松完成《水准仪测量记录表》、《全站仪平面位置检测表》、《全站仪放线记录表》等的制作,包含导线点、水准点、平曲线(线元法)、纵断面、横坡超高计算等多个方面,实用程序,用户可以快速进行测量资料的记录、表格数据录入、表格管理等操作,方便快捷。
目录(一) 、功能特色 (2)(二) 、平曲线 (3)(三) 、断链 (5)(四) 、竖曲线(纵断面) (5)(五) 、超高数据表 (6)(六) 、标准路面参数表 (7)(七) 、水准点成果表 (7)(八) 、导线点成果表 (8)(九) 、原始数据表(进入正题) (9)(十) 、自动计算 (10)(十一) 重复九、十自动生成记录表 (11)(一)、功能特色1、本程序利用EXCEL、WPS电子表格,自动生成水准仪测量记录表、平面位置检测记录表、全站仪放线记录表。
2、适用于任何版本的EXCEL、WPS,无需安装,直接使用。
3、自动转点、自动计算坐标、自动偏差。
4、自动计算路面高程,减少数据输入。
5、支持交点法、线元法。
6、支持断链。
7、可以根据需求修改属于你自己项目的记录表。
8、除断链桩号前可以加”*”,其余桩号都应输入数字。
(二)、平曲线1、在空白处输入平曲线参数:(点号、交点坐标、交点桩号、半径、缓和曲线长度)备注:输入数据须为数字;没有缓和曲线,输入0。
2、点击“计算”按钮,自动计算(转角值、圆曲线长、切线长、主点桩号)(三)、断链在空白处输入断链桩号(备注:长链的断链重复桩号,在后断链桩号前加”*”)断链表(四)、竖曲线(纵断面)1、在空白处输入竖曲线参数:(桩号、标高、半径)2、点击“计算”按钮,自动计算(切线长、外距、竖曲线起点桩号、竖曲线终点桩号、转坡角、纵坡)(五)、超高数据表在空白处输入超高参数(桩号、横坡值、超高方式)备注:1、输入横坡变化点桩号处数据2、函数Lx(“缓和曲线长”, “超高横坡”, “路拱横坡”)计算路基由正常路拱横坡到单向路拱横坡时的长度;(六)、标准路面参数表在空白处输入标准路面构造参数备注:”中桩(判断路面宽度)”列为该段路面变化点终点桩号(七)、水准点成果表在空白处输入该线路全部的水准点参数备注:函数fszh(“X坐标”,”Y坐标”),计算XY对应的桩号(八)、导线点成果表在空白处输入该线路全部的导线点参数备注:函数fszh(“X坐标”,”Y坐标”),计算XY对应的桩号导线点成果表(九)、原始数据表(进入正题)该表是生成记录表的依据1、在”桩号”、”偏距”、”高程”、”工程部位”列,输入数据①函数lmgc0(“桩号”,”偏距”),计算路面高程;②“工程部位”单元格以下内容为空白,视为一段工程。
EXCEL计算坐标程序

EXCEL计算坐标程序Excel是一款强大的电子表格软件,可以进行各种数据计算和处理。
在Excel中,可以使用函数来计算坐标。
下面是一个示例程序,用于计算坐标的相关操作。
首先,在Excel中创建一个新的工作表。
在A列中输入横坐标的值,在B列中输入纵坐标的值。
例如,将横坐标的值依次输入到A1、A2、A3...单元格中,将纵坐标的值依次输入到B1、B2、B3...单元格中。
接下来,我们可以使用Excel中的函数来计算坐标的相关信息。
下面是一些常用的函数:1.求和函数在C列中输入`=SUM(A1:A10)`,即可求出A1到A10单元格的和,也就是横坐标的总和。
类似地,可以在D列中输入`=SUM(B1:B10)`,求出纵坐标的总和。
2.平均函数在E列中输入`=AVERAGE(A1:A10)`,即可求出A1到A10单元格的平均值,也就是横坐标的平均值。
类似地,可以在F列中输入`=AVERAGE(B1:B10)`,求出纵坐标的平均值。
3.极值函数在G列中输入`=MIN(A1:A10)`,即可求出A1到A10单元格中的最小值,也就是横坐标的最小值。
类似地,可以在H列中输入`=MIN(B1:B10)`,求出纵坐标的最小值。
同理,在I列中输入`=MAX(A1:A10)`,求出横坐标的最大值,在J列中输入`=MAX(B1:B10)`,求出纵坐标的最大值。
4.统计函数在K列中输入`=COUNT(A1:A10)`,即可统计A1到A10单元格中的数值个数,也就是横坐标的个数。
类似地,可以在L列中输入`=COUNT(B1:B10)`,统计纵坐标的个数。
5.方差函数在M列中输入`=VAR(A1:A10)`,即可求出A1到A10单元格中的方差,也就是横坐标的方差。
类似地,可以在N列中输入`=VAR(B1:B10)`,求出纵坐标的方差。
6.标准差函数在O列中输入`=STDEV(A1:A10)`,即可求出A1到A10单元格中的标准差,也就是横坐标的标准差。
CASIO fx-5800P计算器路线坐标高程计算程序
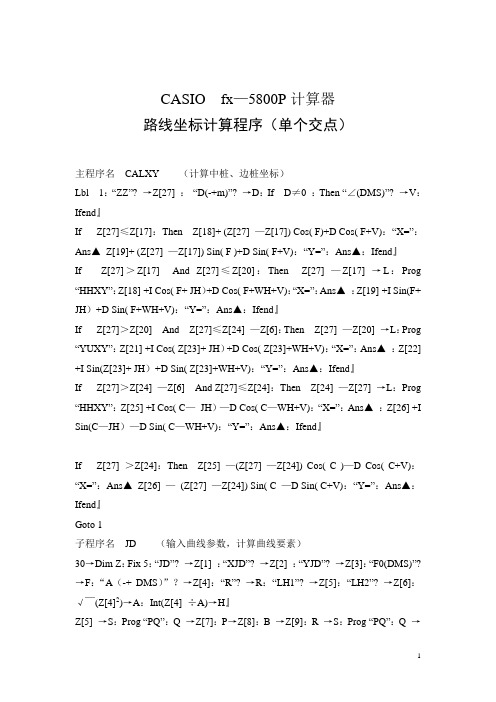
CASIO fx—5800P计算器路线坐标计算程序(单个交点)主程序名CALXY (计算中桩、边桩坐标)Lbl 1:“ZZ”? →Z[27] :“D(-+m)”? →D:If D≠0 :Then “∠(DMS)”? →V:Ifend』If Z[27]≤Z[17]:Then Z[18]+ (Z[27] —Z[17]) Cos( F)+D Cos( F+V):“X=”:Ans▲Z[19]+ (Z[27] —Z[17]) Sin( F )+D Sin( F+V):“Y=”:Ans▲:Ifend』If Z[27]>Z[17] And Z[27]≤Z[20]:Then Z[27] —Z[17] →L:Prog “HHXY”:Z[18] +I Cos( F+ JH)+D Cos( F+WH+V):“X=”:Ans▲:Z[19] +I Sin(F+ JH)+D Sin( F+WH+V):“Y=”:Ans▲:Ifend』If Z[27]>Z[20] And Z[27]≤Z[24] —Z[6]:Then Z[27] —Z[20] →L:Prog “YUXY”:Z[21] +I Cos( Z[23]+ JH)+D Cos( Z[23]+WH+V):“X=”:Ans▲:Z[22] +I Sin(Z[23]+ JH)+D Sin( Z[23]+WH+V):“Y=”:Ans▲:Ifend』If Z[27]>Z[24] —Z[6] And Z[27]≤Z[24]:Then Z[24] —Z[27] →L:Prog “HHXY”:Z[25] +I Cos( C—JH)—D Cos( C—WH+V):“X=”:Ans▲:Z[26] +I Sin(C—JH)—D Sin( C—WH+V):“Y=”:Ans▲:Ifend』If Z[27] >Z[24]:Then Z[25] —(Z[27] —Z[24]) Cos( C )—D Cos( C+V):“X=”:Ans▲Z[26] —(Z[27] —Z[24]) Sin( C —D Sin( C+V):“Y=”:Ans▲:Ifend』Goto 1子程序名JD (输入曲线参数,计算曲线要素)30→Dim Z:Fix 5:“JD”? →Z[1] :“XJD”? →Z[2] :“YJD”? →Z[3]:“F0(DMS)”? →F:“A(-+ DMS)”?→Z[4]:“R”? →R:“LH1”? →Z[5]:“LH2”? →Z[6]:√ ̄(Z[4]2)→A:Int(Z[4] ÷A)→H』Z[5] →S:Prog “PQ”:Q →Z[7]:P→Z[8]:B →Z[9]:R →S:Prog “PQ”:Q →Z[10]:P→Z[11] :B →Z[12] 』(R+ Z[8])Tan(A÷2)+ Z[7] —(Z[8] —Z[11]) ÷Sin(A)→Z[13] :“T1=”:Ans ▲(R+ Z[11])Tan(A÷2)+ Z[10] —(Z[8] —Z[11])÷Sin(A)→Z[14] :“T2=”:Ans▲』√ ̄((Z[13] —Z[7])2+( R+ Z[8])2) —R →Z[15]:“E=”:Ans▲R( A —Z[9] —Z[12] )÷57.2958+ Z[5] + Z[6] →Z[16]:“L=”:Ans▲』Z[1] —Z[13]→Z[17]:Z[2] —Z[13]Cos( F) →Z[18]:Z[3] —Z[13] Sin( F) →Z[19]:If Z[5]>0 :then Z[17] +Z[5]→Z[20]:Z[5] →L:Prog “HHXY”:Z[18] +I Cos( (F+ JH))→Z[21]:Z[19] +I Sin( (F+ JH))→Z[22]:(F+ WH)→Z[23] :Else Z[17]→Z[20]:Z[18]→Z[21]:Z[19]→Z[22]:F→Z[23]:Ifend』Z[17] + Z[16]→Z[24]:Z[2] +Z[14] Cos( (F+ Z[4]))→Z[25]:Z[3] +Z[14] Sin( (F+ Z[4]))→Z[26]:F+ Z[4] —180→C』Prog “CALXY”』子程序名PQS÷2—S3÷(240 R2)→Q:S2÷(24 R)—S4÷(2384 R3)→P:28.6479S ÷R→B』子程序名HHXYL—L5÷(40S2 R2)+L9÷(3456 R4S4) →X:L3÷(6S R)—L7÷(336S3 R3)+L11÷(42240 R5S5)→Y:28.6479L2÷(S R) →W:Pol(X,Y)』子程序名YUXY57.2958L÷R →W:RSin(W)→X:R(1—Cos(W))→Y:Pol(X,Y)』CASIO fx—5800P计算器路线坐标计算程序(单个交点)使用说明首先运行子程序“JD”,输入曲线参数,计算曲线要素。
fx-5800p计算器程序

X=RB-SC(32005.7801+V(133.9123+0.7032V));
S=SinB;C=CosB;V=Sin2B;R=6367558.49686;B为纬度。
T=tgB;h=T2;E=67.385254×10-4;M=W2;W=CosB;
Q=l+E;N=6399698.90178/ ;l=L+L0。
具体操作步骤
步骤
按 健
显 示
步骤
按 健
显 示
1
AC
光标闪动
2
FILE
文件屏幕
3
上下移光标
DA HUAN ZHI
4
EXE
B=?
5
43°42′10″EXE
L=?
6
127°26′51″EXE
A=
7
129 EXE
P=?
8
6EXE
X=4842055.202
9
EXE
Y=22374857.150
10
EXE
OK
计算结果:X=4842055.202;Y=22374857.150
“Y=”:D+((((H-18)H-(58H-14)E+5)M÷20+Q-H)M÷6+1)NW◣
”OK”
4、变量名称和存储器内容
此程序是大地坐标化为直角坐标,即B、L坐标化为X、Y坐标。
B-----该计算点的纬度(°′″);
L-----该计算点的经度(°′″);
A------经度所在中央子午线度数(°);
EXE
H=319.709
27
EXE
OK
计算结果
边号
水平距离
曲线道路坐标计算(Excel)

曲线道路坐标计算(Excel)曲线道路坐标计算§1 曲线要素计算缓和曲线是在不改变直线段方向和保持圆曲线半径不变的条件下,插入到直线段和圆曲线之间的。
其曲率半径ρ从直线的曲率半径∞(无穷大)1逐渐变化到圆曲线的半径R,在缓和曲线上任意一点的曲率半径ρ与缓和曲线的长度l成反比,以公式表示为:ρ∝ 或ρ⋅l=C(C为常数,称l曲线半径变更率)。
当l=lo时,ρ=R,应有C=ρ⋅l=R⋅lo以上几式是缓和曲线必要的前提条件。
在实际应用中,可采取符合这一前提条件的曲线作为缓和曲线。
常用的有辐射螺旋线及三次抛物线,我国采用辐射螺旋线。
为了在圆曲线与直线之间加入一段缓和曲线lo,原来的圆曲线需要在垂直于其切线的方向移动一段距离p,因而圆心就由O'移到O,而原来的半径R保持不变,如图。
由图中可看出,缓和曲线约有一半的长度是靠近原来的直线部分,而另一半是靠近原来的圆曲线部分,原来圆曲线的两端其圆心角βo相对应的那部分圆弧,现在由缓和曲线所代替,因而圆曲线只剩下缓圆点(HY)到圆缓点(YH)这段长度即ly。
βo为缓和曲线的切线角,即缓圆点或圆缓点切线与直缓点或缓直点切线的交角,亦即圆曲线HY→YH两端各延长γ为缓和曲线总偏角,即从直缓点(ZH)测设缓圆点(HY)或从缓直点(HZ)测设圆缓点(YH)的偏角。
q为切线增量(切垂距),即ZH(或HZ)到从圆心O向ZH(或HZ)的切线作垂线垂足的距离。
p为圆曲线内移值,即垂线(从圆心O向ZH(或HZ)的切线作垂线)长与圆曲线半径R之差。
lo部分所对应的圆心角。
2§1.1 不等长缓和曲线要素计算:在铁路曲线测设中,线路曲线一般是由相等的两条缓和曲线中间加一个圆曲线构成,有时还会出现由两个不等长的缓和曲线中间加一个圆曲线构成的特殊情况,如图:缓和曲线长分别为lo1、lo2 ,切线长分别为T1、T2 ,曲线偏角(线路转角)为α,圆曲线半径为R,圆曲线长为ly ,曲线长为L ,外矢距为E ,切曲差为J,(缓和曲线后)圆曲线内移值分别为p1、p2,(缓和曲线)切线增量分别为q1、q2,缓和曲线偏角分别为βo1、2βo2 ,回旋线参数分别为A12=Rlo1、A2=Rlo2各曲线要素计算公式如下:llq1=o1-o122240R3T2=q2+(R+p2)tgα2+(p1-p2)sinαllq2=o2-o222240Rllp1=o1-o1324R2688Rllp2=o2-o2324R2688R2243βo1=lo118090lo1⋅= 2RππRβo2=lo218090lo2⋅= 2RππRL=lo1+lo2+(α-βo1-βo2)πR180︒T1=q1+(R+p1)tgα2+(p2-p1)sinα从以上公式可以看出,当lo1=lo2时,就是等长(对称)缓和曲线的情况。
(整理)道路中边桩坐标放样正算程序ROAD-8改进版
道路中边桩坐标放样正算程序ROAD-2(0908改进版)一、前言本次的“道路中边桩坐标放样正算程序ROAD-2(0908改进版)”可理解为以下两个程序的升级版本:1.路线坐标放样计算程序ROAD-1(09-08改进版),09年8月24日发布2.道路中边桩坐标放样正算程序ROAD-2,09年4月17日发布09年8月24日(也就是几天前)发布的“路线坐标放样计算程序ROAD-1(09-08改进版)”,是对《CASIO fx-5800P计算与道路坐标放样计算》书中的ROAD-1程序的改进,其改进的一些编程技巧和程序优化同样也被本程序所采纳。
09年4月17日发布的“道路中边桩坐标放样正算程序ROAD-2”当时也是作为ROAD-1的升级替代程序出现,本次发布的ROAD-2较之前的版本又有较大改进,除了采用前面所述的一些编程技巧和程序优化,以及老版本的ROAD-2程序的特点之外,还有如下一些特点:1.采用交点定位技术,程序开始执行输入一个定位桩号K0用于定位交点,后面的坐标正、算均在该交点范围内进行,曲线要素计算只在程序开始时运行一次,避免了每次计算桩号都要重新定位交点数据、计算曲线要素的麻烦,提高了计算速度,虽然存在每次执行程序只能在一个交点计算范围内计算,要计算另一个交点范围的桩号,要重新执行程序的缺点,但比起由此带来的优势,这是微不足道的(交点定位技术还有其它优点,后面还会提到);2.交点定位技术的采用,结合交点计算桩号范围的确定,可圆满解决纯直线路段、断链、卵形曲线等公路中比较特殊的情况,具体解决方案会在后面的日志中详细解读;3.数据库子程序采用矩阵变量的形式,使数据组织更加简洁,输入更加便捷;4.程序考虑了调用数据库子程序和手工输入交点数据两种方法。
总而言之,ROAD-1程序功能要相对单一一些,可作为读者的道路计算入门程序进行学习和应用,而ROAD-2程序完全包含了ROAD-1的所有功能和特点,是可替代ROAD-1的更高级的版本,功能更加丰富,基本上覆盖了公路路线各种情况的坐标计算。