大学物理第四五六章习题参考答案
大学物理第四、五、六章习题参考答案

第4章 机械振动4.1基本要求1.掌握描述简谐振动的振幅、周期、频率、相位和初相位的物理意义及之间的相互关系2.掌握描述简谐振动的解析法、旋转矢量法和图线表示法,并会用于简谐振动规律的讨论和分析3.掌握简谐振动的基本特征,能建立一维简谐振动的微分方程,能根据给定的初始条件写出一维简谐振动的运动方程,并理解其物理意义4.理解同方向、同频率简谐振动的合成规律,了解拍和相互垂直简谐振动合成的特点4.2基本概念1.简谐振动 离开平衡位置的位移按余弦函数(或正弦函数)规律随时间变化的运动称为简谐振动。
简谐振动的运动方程 cos()x A t ωϕ=+2.振幅A 作简谐振动的物体的最大位置坐标的绝对值。
3.周期T 作简谐振动的物体完成一次全振动所需的时间。
4.频率ν 单位时间内完成的振动次数,周期与频率互为倒数,即1T ν=5.圆频率ω 作简谐振动的物体在2π秒内完成振动的次数,它与频率的关系为22Tπωπν== 6.相位和初相位 简谐振动的运动方程中t ωϕ+项称为相位,它决定着作简谐振动的物体状态;t=0时的相位称为初相位ϕ7.简谐振动的能量 作简谐振动的系统具有动能和势能。
弹性势能222p 11cos ()22E kx kA t ωϕ==+ 动能[]22222k 111sin()sin ()222E m m A t m A t ωωϕωωϕ==-+=+v弹簧振子系统的机械能为222k p 1122E E E m A kA ω=+== 8.阻尼振动 振动系统因受阻尼力作用,振幅不断减小。
9.受迫振动 系统在周期性外力作用下的振动。
周期性外力称为驱动力。
10.共振 驱动力的角频率为某一值时,受迫振动的振幅达到极大值的现象。
4.3基本规律1.一个孤立的简谐振动系统的能量是守恒的物体做简谐振动时,其动能和势能都随时间做周期性变化,位移最大时,势能达到最大值,动能为零;物体通过平衡位置时,势能为零,动能达到最大值,但其总机械能却保持不变,且机械能与振幅的平方成正比。
大学物理第四章习题答案
大学物理第四章习题答案大学物理第四章习题答案大学物理是一门让许多学生感到头疼的学科,尤其是对于那些对数学和计算不太擅长的学生来说。
而第四章是大学物理中的一个重要章节,涵盖了许多关于力学和运动的基本概念和原理。
在这篇文章中,我将为大家提供一些大学物理第四章习题的答案,希望能够帮助到那些正在学习这门课程的学生。
1. 一个物体以10 m/s的速度沿着水平方向运动,受到一个10 N的水平力的作用,求物体在2秒钟内的位移。
根据牛顿第二定律,物体的加速度可以通过力和质量的比值来计算。
在这个问题中,物体的质量未知,但我们可以通过已知的力和加速度来计算出质量。
由于力和加速度的关系是F = ma,我们可以将已知的力和加速度代入这个公式,解出物体的质量。
然后,我们可以使用物体的质量和已知的力来计算物体的加速度。
最后,我们可以使用物体的初始速度、加速度和时间来计算物体的位移。
2. 一个物体以5 m/s的速度沿着斜坡上升,斜坡的倾角为30度。
求物体在10秒钟内上升的高度。
在这个问题中,我们需要使用三角函数来计算物体在斜坡上升时的垂直位移。
首先,我们可以使用已知的速度和斜坡的倾角来计算物体在斜坡上的水平速度。
然后,我们可以使用已知的时间和水平速度来计算物体在斜坡上的水平位移。
最后,我们可以使用已知的斜坡的倾角和物体在斜坡上的水平位移来计算物体在斜坡上升时的垂直位移。
3. 一个物体以10 m/s的速度竖直向上抛出,求物体在2秒钟内的最大高度和总的飞行时间。
在这个问题中,我们需要使用物体的初速度和重力加速度来计算物体在竖直抛物线运动中的最大高度和总的飞行时间。
首先,我们可以使用已知的初速度和时间来计算物体在竖直方向上的位移。
然后,我们可以使用已知的初速度和重力加速度来计算物体在竖直方向上的最大高度。
最后,我们可以使用已知的重力加速度来计算物体在竖直方向上的总的飞行时间。
这些问题只是大学物理第四章中的一小部分,但它们涵盖了一些基本的概念和原理。
大学物理五第四章习题答案

第四章 振动学基础习题答案1、根据ω=2T πω=,如果考虑弹簧质量,那么m 增大,ω就减小,因此弹簧振子的周期就增大。
2、措施(1)采用方法(3);措施(2)采用方法(5);措施(3)采用方法(2);措施(4)采用方法(4);措施(5)采用方法(1);措施(6)采用方法(1);3、解:由运动方程101cos()x A t ωα=+,202cos()y A t ωα=+,消去参数t 得到合振动的轨迹方程,22221212212122cos()sin ()x y xy A A A A αααα+--=-, 当212παα-=,上式变为2222121x y A A +=, 这是个正椭圆方程,再由相位差的象限可以确定质点沿着正椭圆轨迹做顺时针运动。
4、利用ω=2224T k T m πωπ=⇒= ,因此我们可以把物体挂在弹簧上让其振动,然后测出其振荡频率,再根据上式就可以测出物体的质量。
5、荡秋千是一种振动运动形式,它有由系统决定的固有频率,对于会荡秋千的人,其能粗略地根据这个固有频率用脚去蹬地,这样就能达到共振的条件,因此其可以越荡越高。
6、解:由质点的运动方程50.1cos()23x t ππ=+,可得 (1) 角频率52ωπ=,周期0.8T s =,频率1524f s ωπ-==,振幅0.1A m =,初相位03πϕ=。
(2) 把2t s =代入运动方程得到 位移0.1cos(5)0.053x m ππ=+=-,速度222550.1sin()/223t t t dx v t s dt πππ=====-⋅+=, 加速度222222255550.1cos()/222316t t t d x a t m s dt πππππ=====-⋅⋅+=。
7、解:首先由胡克定律F kx =-得到弹簧的倔强系数210200/510F k N m x -=-==⋅, 则弹簧振子的角频率为/s ω===, 因此弹簧振子的振动周期2T πω==。
大学物理学课后习题4第四章答案
[答案:D]
4.2 填空题 (1)一质点在 X 轴上作简谐振动,振幅 A=4cm,周期 T=2s,其平衡位置
取作坐标原点。若 t=0 时质点第一次通过 x=-2cm 处且向 x 轴负方向运动,则 质点第二次通过 x=-2cm 处的时刻为__ __s。
(3) t2 5s 与 t1 1s 两个时刻的位相差;
解:(1)设谐振动的标准方程为 x Acos(t 0 ) ,相比较厚则有:
A 0.1m,
8 ,T
2
1 4
s,
0
2
/3
又
vm A 0.8 m s1 2.51 m s1
am 2 A 63.2 m s2
(2)
Fm mam 0.63N
(1) x0 A ;
(2)过平衡位置向正向运动; (3)过 x A 处向负向运动;
2
(4)过 x A 处向正向运动. 2
试求出相应的初位相,并写出振动方程.
解:因为
v
x0 A cos0 0 Asin
0
将以上初值条件代入上式,使两式同时成立之值即为该条件下的初位相.故有
1
x Acos( 2 t ) T
103
(
)2
0.17
4.2
103
N
2
方向指向坐标原点,即沿 x 轴负向.
(2)由题知, t 0 时,0 0 ,
t t时
x0
A ,且v 2
0, 故 t
3
∴
t
3
/
2
2s 3
大学物理学振动与波动习题答案
大学物理学(上)第四,第五章习题答案第4章振动P174.4.1 一物体沿x轴做简谐振动,振幅A = 0.12m,周期T = 2s.当t = 0时,物体的位移x= 0.06m,且向x轴正向运动.求:(1)此简谐振动的表达式;(2)t = T/4时物体的位置、速度和加速度;(3)物体从x = -0.06m,向x轴负方向运动第一次回到平衡位置所需的时间.[解答](1)设物体的简谐振动方程为x = A cos(ωt + φ),其中A = 0.12m,角频率ω = 2π/T = π.当t = 0时,x = 0.06m,所以cosφ = 0.5,因此φ = ±π/3.物体的速度为v = d x/d t = -ωA sin(ωt + φ).当t = 0时,v = -ωA sinφ,由于v > 0,所以sinφ < 0,因此φ = -π/3.简谐振动的表达式为x = 0.12cos(πt –π/3).(2)当t = T/4时物体的位置为x = 0.12cos(π/2–π/3)= 0.12cosπ/6 = 0.104(m).速度为v = -πA sin(π/2–π/3)= -0.12πsinπ/6 = -0.188(m·s-1).加速度为a = d v/d t = -ω2A cos(ωt + φ)= -π2A cos(πt - π/3)= -0.12π2cosπ/6 = -1.03(m·s-2).(3)方法一:求时间差.当x= -0.06m 时,可得cos(πt1 - π/3) = -0.5,因此πt1 - π/3 = ±2π/3.由于物体向x轴负方向运动,即v < 0,所以sin(πt1 - π/3) > 0,因此πt1 - π/3 = 2π/3,得t1 = 1s.当物体从x = -0.06m处第一次回到平衡位置时,x = 0,v > 0,因此cos(πt2 - π/3) = 0,可得πt2 - π/3 = -π/2或3π/2等.由于t2 > 0,所以πt2 - π/3 = 3π/2,可得t2 = 11/6 = 1.83(s).所需要的时间为Δt = t2 - t1 = 0.83(s).方法二:反向运动.物体从x= -0.06m,向x轴负方向运动第一次回到平衡位置所需的时间就是它从x = 0.06m,即从起点向x 轴正方向运动第一次回到平衡位置所需的时间.在平衡位置时,x = 0,v < 0,因此cos(πt - π/3) = 0,可得πt - π/3 = π/2,解得t = 5/6 = 0.83(s).[注意]根据振动方程x = A cos(ωt + φ),当t = 0时,可得φ = ±arccos(x0/A),(-π < φ≦π),初位相的取值由速度决定.由于v = d x/d t = -ωA sin(ωt + φ),当t = 0时,v = -ωA sinφ,当v > 0时,sinφ < 0,因此φ = -arccos(x0/A);当v < 0时,sinφ > 0,因此φ = arccos(x0/A).可见:当速度大于零时,初位相取负值;当速度小于零时,初位相取正值.如果速度等于零,当初位置x0 = A时,φ = 0;当初位置x0 = -A时,φ = π.4.2 已知一简谐振子的振动曲线如图所示,试由图求:(1)a,b,c,d,e各点的位相,及到达这些状态的时刻t各是多少?已知周期为T;(2)振动表达式;(3)画出旋转矢量图.[解答]方法一:由位相求时间.(1)设曲线方程为x = A cosΦ,其中A表示振幅,Φ = ωt + φ表示相位.由于x a = A,所以cosΦa = 1,因此Φa = 0.由于x b = A/2,所以cosΦb = 0.5,因此Φb = ±π/3;由于位相Φ随时间t增加,b点位相就应该大于a点的位相,因此Φb = π/3.由于x c = 0,所以cosΦc = 0,又由于c点位相大于b位相,因此Φc = π/2.同理可得其他两点位相为Φd = 2π/3,Φe = π.c点和a点的相位之差为π/2,时间之差为T/4,而b点和a点的相位之差为π/3,时间之差应该为T/6.因为b点的位移值与O时刻的位移值相同,所以到达a点的时刻为t a = T/6.到达b点的时刻为t b = 2t a = T/3.到达c点的时刻为t c = t a + T/4 = 5T/12.到达d点的时刻为t d = t c + T/12 = T/2.到达e点的时刻为t e = t a + T/2 = 2T/3.(2)设振动表达式为x = A cos(ωt + φ),当t = 0时,x = A/2时,所以cosφ = 0.5,因此φ =±π/3;由于零时刻的位相小于a点的位相,所以φ = -π/3,因此振动表达式为cos(2)3tx ATπ=π-.另外,在O时刻的曲线上作一切线,由于速度是位置对时间的变化率,所以切线代表速度的方向;由于其斜率大于零,所以速度大于零,因此初位相取负值,从而可得运动方程.(3)如图旋转矢量图所示.方法二:由时间求位相.将曲线反方向延长与t轴相交于f点,由于x f = 0,根据运动方程,可得cos(2)03tTππ-=所以232ftTπππ-=±.图6.2显然f 点的速度大于零,所以取负值,解得t f = -T /12.从f 点到达a 点经过的时间为T /4,所以到达a 点的时刻为t a = T /4 + t f = T /6,其位相为203a a t T Φπ=π-=.由图可以确定其他点的时刻,同理可得各点的位相.4.3如图所示,质量为10g 的子弹以速度v = 103m ·s -1水平射入木块,并陷入木块中,使弹簧压缩而作简谐振动.设弹簧的倔强系数k= 8×103N ·m -1,木块的质量为 4.99kg ,不计桌面摩擦,试求:(1)振动的振幅; (2)振动方程.[解答](1)子弹射入木块时,由于时间很短,木块还来不及运动,弹簧没有被压缩,它们的动量守恒,即mv = (m + M )v 0.解得子弹射入后的速度为v 0 = mv/(m + M ) = 2(m ·s -1),这也是它们振动的初速度.子弹和木块压缩弹簧的过程机械能守恒,可得(m + M ) v 02/2 = kA 2/2,所以振幅为A v =×10-2(m). (2)振动的圆频率为ω=·s -1).取木块静止的位置为原点、向右的方向为位移x 的正方向,振动方程可设为x = A cos(ωt + φ).当t = 0时,x = 0,可得φ = ±π/2;由于速度为正,所以取负的初位相,因此振动方程为x = 5×10-2cos(40t - π/2)(m). 4.4 如图所示,在倔强系数为k 的弹簧下,挂一质量为M 的托盘.质量为m 的物体由距盘底高h 处自由下落与盘发生完全非弹性碰撞,而使其作简谐振动,设两物体碰后瞬时为t = 0时刻,求振动方程.[解答]物体落下后、碰撞前的速度为v =物体与托盘做完全非弹簧碰撞后,根据动量守恒定律可得它们的共同速度为0m v v m M ==+这也是它们振动的初速度. 设振动方程为x = A cos(ωt + φ),其中圆频率为ω=物体没有落下之前,托盘平衡时弹簧伸长为x 1,则x 1 = Mg/k .物体与托盘碰撞之后,在新的平衡位置,弹簧伸长为x 2,则x 2 = (M + m )g/k .取新的平衡位置为原点,取向下的方向为正,则它们振动的初位移为x 0 = x 1 - x 2 = -mg/k . 因此振幅为A ==图4.3图4.4= 初位相为00arctanv x ϕω-==4.5重量为P 的物体用两根弹簧竖直悬挂,如图所示,各弹簧的倔强系数标明在图上.试求在图示两种情况下,系统沿竖直方向振动的固有频率.[解答](1)可以证明:当两根弹簧串联时,总倔强系数为k = k 1k 2/(k 1 + k 2),因此固有频率为2πων===.(2)因为当两根弹簧并联时,总倔强系数等于两个弹簧的倔强系数之和,因此固有频率为2πων===4.6 一匀质细圆环质量为m ,半径为R ,绕通过环上一点而与环平面垂直的水平光滑轴在铅垂面内作小幅度摆动,求摆动的周期.[解答]方法一:用转动定理.通过质心垂直环面有一个轴,环绕此轴的转动惯量为 I c = mR 2. 根据平行轴定理,环绕过O点的平行轴的转动惯量为I = I c + mR 2 = 2mR 2.当环偏离平衡位置时,重力的力矩为M = -mgR sin θ,方向与角度θ增加的方向相反.根据转动定理得I β = M ,即 22d sin 0d I mgR tθθ+=,由于环做小幅度摆动,所以sin θ≈θ,可得微分方程22d 0d mgRt Iθθ+=. 摆动的圆频率为ω=周期为2πT ω=22==方法二:用机械能守恒定律.取环的质心在最底点为重力势能零点,当环心转过角度θ时,重力势能为E p = mg (R - R cos θ), 绕O 点的转动动能为212k E I =ω, 总机械能为21(cos )2E I mg R R =+-ωθ. 环在转动时机械能守恒,即E 为常量,将上式对时间求导,利用ω = d θ/d t ,β = d ω/d t ,得0 = I ωβ + mgR (sin θ) ω,由于ω ≠ 0,当θ很小有sin θ≈θ,可得振动的微分方程22d 0d mgRt Iθθ+=, 从而可求角频率和周期.[注意]角速度和圆频率使用同一字母ω,不要将两者混淆.(b)图4.54.7 横截面均匀的光滑的U 型管中有适量液体如图所示,液体的总长度为L ,求液面上下微小起伏的自由振动的频率。
(完整版)大学物理学(课后答案)第5-6章
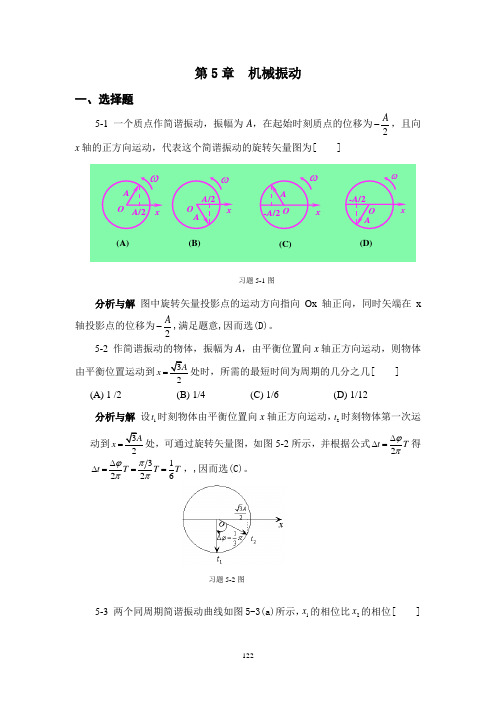
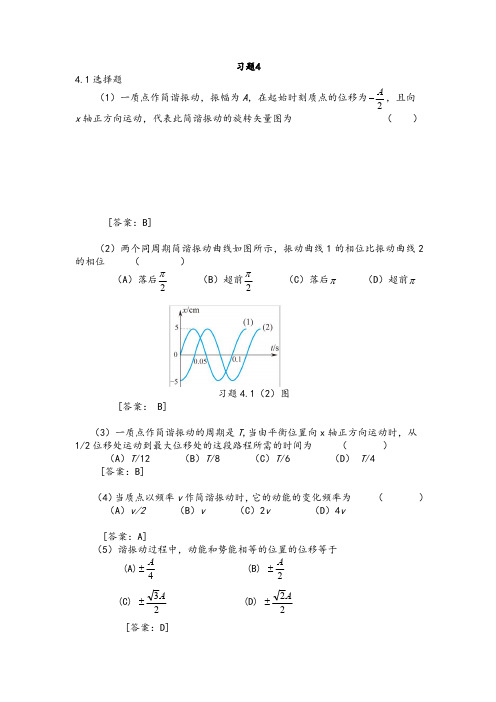
第5章 机械振动一、选择题5-1 一个质点作简谐振动,振幅为A ,在起始时刻质点的位移为2A-,且向x 轴的正方向运动,代表这个简谐振动的旋转矢量图为[ ]分析与解 图中旋转矢量投影点的运动方向指向Ox 轴正向,同时矢端在x 轴投影点的位移为2A-,满足题意,因而选(D)。
5-2 作简谐振动的物体,振幅为A ,由平衡位置向x 轴正方向运动,则物体由平衡位置运动到32Ax =处时,所需的最短时间为周期的几分之几[ ] (A) 1 /2 (B) 1/4 (C) 1/6 (D) 1/12分析与解 设1t 时刻物体由平衡位置向x 轴正方向运动,2t 时刻物体第一次运动到32A x =处,可通过旋转矢量图,如图5-2所示,并根据公式2t T ϕπ∆∆=得31226t T T T ϕπππ∆∆===,,因而选(C)。
5-3 两个同周期简谐振动曲线如图5-3(a)所示,1x 的相位比2x 的相位[ ] O O OO A Axxx(A) (B)(D)(C)A /2-A /2 A /2 -A /2A Aωωωωx习题5-1图习题5-2图(A) 落后2π (B) 超前2π(C) 落后π (D) 超前π分析与解 可通过振动曲线作出相应的旋转矢量图(b ),正确答案为(B )。
5-4 一弹簧振子作简谐振动,总能量为E ,若振幅增加为原来的2倍,振子的质量增加为原来的4倍,则它的总能量为[ ](A) 2E (B) 4E (C) E (D) 16E 分析与解 因为简谐振动的总能量2p k 12E E E kA =+=,因而当振幅增加为原来的2倍时,能量变为原来的4倍,因而答案选(B)。
5-5 两个同振动方向、同频率、振幅均为A 的简谐振动合成后,振幅仍为A ,则这两个简谐振动的相位差为[ ](A) 60 (B) 90 (C) 120 (D) 180分析与解 答案(C )。
由旋转矢量图可知两个简谐振动的相位差为120时,合成后的简谐运动的振幅仍为A 。
大学物理第5章习题答案

r dx 2 d sin
arccos ( L L2 )22r 2 E E y 2 dE y 2 ( sin )d 900 4π 0 r
习题答案
L 2 0
第五章 静电场
arccos ( L L2 )22r 2 E E y 2 dE y 2 ( sin )d 900 4π 0 r
R
s
E dS EdS 4 r 2 E q / 0
s
.
r
r
E=
q 4 0 r 2
q dV kr 4r d r 4kr 3 d r kr 4
2 V 0 0 r
rR
kr 2 E er 4 0
习题答案
解:1)利用高斯定理 做一半径为r的同心球面为高斯面
e E S ES cos
第五章 静电场
z
解: e上 e下 0
e左 E y a 2 E2 a 2 e右 E y a E 2 a
2 2
o
x E ( E1 kx )i E2 j
E x E1 kx
y
e后 E x a 2 E1a 2
dq
r
x
O
x
z
xdq R cos 2 R 2 sin d dE 0 cos sin d 3 3 4 πε0 R 2 ε0 4 πε0 R
E0
2 ε0
2 0
cos sin d
4 ε0
习题答案
第五章 静电场
5-12 真空中两条平行的“无限长”均匀带电直线相 距为r,其电荷线密度分别为-和+.试求: (1) 在两直线构成的平面上,任意一点的场强. (2) 两带电直线上单位长度上的电场力.
大学物理学第四版第一到六章课后题答案

习题11.1选择题(1) 一运动质点在某瞬时位于矢径),(y x r的端点处,其速度大小为(A)dtdr (B)dt r d(C)dtr d ||(D)22)()(dtdy dt dx + [答案:D](2) 一质点作直线运动,某时刻的瞬时速度s m v /2=,瞬时加速度2/2s m a -=,则一秒钟后质点的速度(A)等于零 (B)等于-2m/s (C)等于2m/s (D)不能确定。
[答案:D](3) 一质点沿半径为R 的圆周作匀速率运动,每t 秒转一圈,在2t 时间间隔中,其平均速度大小和平均速率大小分别为 (A)tR t R ππ2,2 (B) t Rπ2,0 (C) 0,0 (D)0,2tR π [答案:B] 1.2填空题(1) 一质点,以1-⋅s m π的匀速率作半径为5m 的圆周运动,则该质点在5s 内,位移的大小是 ;经过的路程是 。
[答案: 10m ; 5πm](2) 一质点沿x 方向运动,其加速度随时间的变化关系为a=3+2t (SI),如果初始时刻质点的速度v 0为5m·s -1,则当t 为3s 时,质点的速度v= 。
[答案: 23m·s -1 ](3) 轮船在水上以相对于水的速度1V 航行,水流速度为2V ,一人相对于甲板以速度3V行走。
如人相对于岸静止,则1V 、2V和3V 的关系是 。
[答案: 0321=++V V V]1.3 一个物体能否被看作质点,你认为主要由以下三个因素中哪个因素决定:(1) 物体的大小和形状; (2) 物体的内部结构; (3) 所研究问题的性质。
解:只有当物体的尺寸远小于其运动范围时才可忽略其大小的影响,因此主要由所研究问题的性质决定。
1.4 下面几个质点运动学方程,哪个是匀变速直线运动?(1)x=4t-3;(2)x=-4t 3+3t 2+6;(3)x=-2t 2+8t+4;(4)x=2/t 2-4/t 。
给出这个匀变速直线运动在t=3s 时的速度和加速度,并说明该时刻运动是加速的还是减速的。
大学物理第6章习题参考答案

第六章习题解答6-1 解:首先写出S 点的振动方程 若选向上为正方向,则有:0c o s02.001.0ϕ=- 21cos 0-=ϕ,0s i n 00>-=ϕωυA 0sin 0<ϕ 即 πϕ320-=或π34 初始相位 πϕ320-=则 m t y s )32cos(02.0πω-=再建立如图题6-1(a)所示坐标系,坐标原点选在S 点,沿x 轴正向取任一P 点,该点振动位相将落后于S 点,滞后时间为: ux t =∆则该波的波动方程为:m u x t y ⎥⎦⎤⎢⎣⎡--=πω32)(cos 02.0若坐标原点不选在S 点,如习题6-1图(b )所示,P 点仍选在S 点右方,则P 点振动落后于S 点的时间为: uL x t -=∆则该波的波方程为:m uL x t y ⎥⎦⎤⎢⎣⎡---=πω32)(cos 02.0若P 点选在S 点左侧,P 点比S 点超前时间为ux L -,如习题6-1图(c)所示,则⎥⎦⎤⎢⎣⎡--+=πω32)(cos 02.0u x L t y⎥⎦⎤⎢⎣⎡---=πω32)(cos 02.0uL x t∴不管P 点在S 点左边还是右边,波动方程为: ⎥⎦⎤⎢⎣⎡---=πω32)(cos 02.0uL x t y6-2 解(1)由习题6-2图可知, 波长 m 8.0=λ 振幅A=0.5m习题6-1图习题6-1图频率 Hz 125Hz 8.0100===λuv周期 s 10813-⨯==vT ππυω2502==(2)平面简谐波标准波动方程为: ⎥⎦⎤⎢⎣⎡+-=ϕω)(cos u xt A y 由图可知,当t=0,x=0时,y=A=0.5m ,故0=ϕ。
将ϕπωω、、、u v A )2(=代入波动方程,得:m )100(250cos 5.0⎥⎦⎤⎢⎣⎡-=x t y π(3) x =0.4m 处质点振动方程.⎥⎦⎤⎢⎣⎡-=)1004.0(250cos 5.0t y π m )250cos(5.0ππ-=t6-3 解(1)由习题6-3图可知,对于O 点,t=0时,y=0,故2πϕ±=再由该列波的传播方向可知,00<υ取 2πϕ=由习题6-3图可知,,40.0m OP ==λ且u=0.08m/s ,则ππλππω52rad/s 40.008.0222====u v rad/s可得O 点振动表达式为:m t y )252cos(04.00ππ+=(2) 已知该波沿x 轴正方向传播,u=0.08m/s,以及O 点振动表达式,波动方程为:m x t y ⎥⎦⎤⎢⎣⎡+-=2)08.0(52cos 04.0ππ(3) 将40.0==λx 代入上式,即为P 点振动方程:m t y y p ⎥⎦⎤⎢⎣⎡+==ππ2152cos 04.00 (4)习题6-3图中虚线为下一时刻波形,由图可知,a 点向下运动,b 点向上运动。
大学物理第五章和第六章习题答案

大学物理习题集(上)专业班级 姓名_ 学号_第五章 刚体的定轴转动一.选择题1.关于刚体对轴的转动惯量,下列说法中正确的是[ C ](A )只取决于刚体的质量,与质量的空间分布和轴的位置无关。
(B )取决于刚体的质量和质量的空间分布,与轴的位置无关。
(C )取决于刚体的质量、质量的空间分布和轴的位置。
(D )只取决于转轴的位置,与刚体的质量和质量的空间分布无关。
2. 均匀细棒 OA 可绕通过某一端 O 而与棒垂直的水平固定光滑轴转动,今使棒从水平位置由静止开始自 由下降,在棒摆到竖直位置的过程中,下述说法哪一种是正确的?[ A ](A )角速度从小到大,角加速度从大到小。
A(B )角速度从小到大,角加速度从小到大。
(C )角速度从大到小,角加速度从大到小。
(D )角速度从大到小,角加速度从小到大。
3. 如图所示,一圆盘绕水平轴 0 做匀速转动,如果同时相向地射来两个质量相同、速度大小相同,且沿同一直线运动的子弹。
子弹射入圆盘均留在盘内,则 子弹射入后的瞬间,圆盘的角速度将 [ B ](A )增大; (B )减小; (C )不变; (D )无法确定。
解答 以圆盘和两子弹为系统,外力矩为零,系统的角动量守恒。
按题意, 两个子弹的初始角动量(对 0 轴之和为零。
两子弹留在圆盘内,增大了圆盘的 转动惯量。
设圆盘的转动惯为 J ,转动的角速度为 ω0 ,则有J ω0 = ( J + ∆J )ωω0 > ω有速度减小,所以应选(B )4. 一轻绳绕在具有水平转轴的定滑轮上,绳下端挂物体,物体的质量为 m ,此时滑轮的角加速度为 a 。
若将物体卸掉,而用大小等于 mg 、方向向下的力拉绳子,则滑轮的角加速度将[ A ](A)变大; (B )不变; (C )变小; (D )无法判断。
解答如图 5-4(a)所示,设滑轮半径为 R,转动惯量为 J。
当绳下滑挂一质量为m 的物体时,受绳的张力F T 和重力W=mg 作用,加速度a 铅直向下。
大学物理课后习题答案(高教版 共三册)
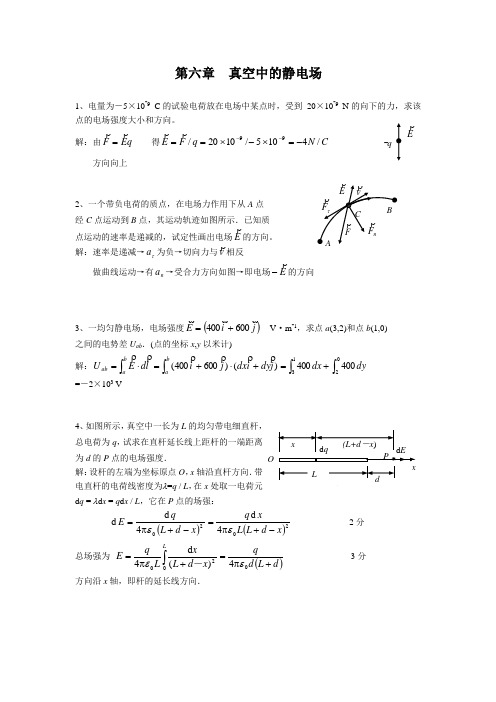
第六章 真空中的静电场1、电量为-5×10-9 C 的试验电荷放在电场中某点时,受到 20×10-9 N 的向下的力,求该点的电场强度大小和方向。
解:由q E F = 得C N q F E /4105/1020/99-=⨯-⨯==--方向向上2、一个带负电荷的质点,在电场力作用下从A 点 经C 点运动到B 点,其运动轨迹如图所示.已知质点运动的速率是递减的,试定性画出电场E的方向。
解:速率是递减→τa 为负→切向力与v相反做曲线运动→有n a →受合力方向如图→即电场E-的方向3、一均匀静电场,电场强度()j i E 600400+=V ·m -1,求点a (3,2)和点b (1,0)之间的电势差U ab .(点的坐标x ,y 以米计) 解:⎰⋅=baab l d E U)()600400(⎰+⋅+=baj dy i dx j i +=⎰13400dx ⎰2400dy=-2×103 V4、如图所示,真空中一长为L 的均匀带电细直杆,总电荷为q ,试求在直杆延长线上距杆的一端距离为d 的P 点的电场强度.解:设杆的左端为坐标原点O ,x 轴沿直杆方向.带电直杆的电荷线密度为λ=q / L ,在x 处取一电荷元d q = λd x = q d x / L ,它在P 点的场强: ()204d d x d L qE -+π=ε()204d x d L L xq -+π=ε 2分总场强为 ⎰+π=Lx d L xL q E 02)(d 4-ε()d L d q +π=04ε 3分方向沿x 轴,即杆的延长线方向.-qEO5、A 、B 为真空中两个平行的“无限大”均匀带电平面,已知两平面间的电场强度大小为E 0,两平面外侧电场强度大小都为E 0/3,方向如图.求A 、B 两平面上的电荷面密度σA , σB . 解:设电荷面密度为σA , σB由场强迭加原理,平面内、外侧电场强度由σA , σB 共同贡献: 外侧:32200E BA=+-εσεσ内侧:0022E BA=+εσεσ联立解得:3/200E Aεσ-= 3/400E Bεσ=6、半径为R 的半球面置于场强为E的均匀电场中,其对称轴与场强方向一致,如图所示.求通过该半球面的电场强度通量。
大学物理第四章课后答案

题4-1图 解:要使一个系统作谐振动,必须同时满足以下三个条件:一 ,描述系统的各种参量,如 质量、转动惯量、摆长……等等在运动中保持为常量;二,系统 是在 自己的稳定平衡位置 附近作往复运动;三,在运动中系统只受到内部的线性回复力的作用. 或者说,若一个系 统的运动微分方程能用
(3)由于谐振动中能量守恒,故在任一位置处或任一时刻的系统的总能量均为
4-7 有一轻弹簧,下面悬挂质量为 1.0g 的物体时,伸长为 4.9cm .用这个弹簧和一个质量 为 8.0g 的小球构成弹簧振子,将小球由平衡位置向下拉开 1.0cm 后 ,给予向上的初速度
v0 = 5.0cm ⋅ s −1 ,求振动周期和振动表达式.
d2 x mg sin θ − T1 = m 2 dt
①
T1 R − T2 R = Iβ
d2 x = Rβ dt 2
②
T2 = k ( x 0 + x )
③
式中 x0 = mg sin θ / k ,为静平衡时弹簧之伸长量,联立以上三式,有
I d2x (mR + ) 2 = − kxR R dt
令 则有
7
∴ 故其角振幅
Байду номын сангаас
2 A = x0 +(
v0 2 v 0 0.01 ) = = = 3.2 × 10 −3 m ω ω 3.13 A = 3.2 × 10 −3 rad l
Θ=
小球的振动方程为
∆φ = ω (t 2 − t1 ) = 8π (5 − 1) = 32π
大学物理课后习题答案(全册)

《大学物理学》课后习题参考答案习题11-1. 已知质点位矢随时间变化函数形式为)ωtsin ωt(cos j i R r其中为常量.求:(1)质点轨道;(2)速度和速率。
解:1)由)ωtsin ωt(cos j i R r知t cos R x ωtsin R yω消去t 可得轨道方程222Ryx2)jr vt Rcos sin ωωt ωR ωdtd iRωt ωR ωt ωR ωv2122])cos ()sin [(1-2. 已知质点位矢随时间变化的函数形式为j ir )t 23(t 42,式中r 的单位为m ,t 的单位为s .求:(1)质点的轨道;(2)从0t到1t 秒的位移;(3)0t 和1t 秒两时刻的速度。
解:1)由j ir)t 23(t 42可知2t 4x t23y消去t 得轨道方程为:2)3y(x2)jir v 2t 8dtd jij i v r 24)dt2t 8(dt101Δ3)jv 2(0)jiv 28(1)1-3. 已知质点位矢随时间变化的函数形式为j ir t t 22,式中r 的单位为m ,t 的单位为s .求:(1)任一时刻的速度和加速度;(2)任一时刻的切向加速度和法向加速度。
解:1)ji r v2t 2dtd iv a2dtd 2)212212)1t(2]4)t 2[(v1tt 2dtdv a 2t22221nta aat 1-4. 一升降机以加速度a 上升,在上升过程中有一螺钉从天花板上松落,升降机的天花板与底板相距为d ,求螺钉从天花板落到底板上所需的时间。
解:以地面为参照系,坐标如图,升降机与螺丝的运动方程分别为20121att v y (1)图 1-420221gttv h y (2)21y y (3)解之2d tg a 1-5. 一质量为m 的小球在高度h 处以初速度0v 水平抛出,求:(1)小球的运动方程;(2)小球在落地之前的轨迹方程;(3)落地前瞬时小球的td dr ,td dv ,tv d d .解:(1)t v x 0式(1)2gt21hy 式(2)jir )gt 21-h (t v (t)20(2)联立式(1)、式(2)得22v 2gx hy (3)ji r gt -v td d 0而落地所用时间gh 2t所以j i r 2gh -v t d d 0jv g td d 2202y2x)gt (vvvv 211222222[()](2)g ghg t dv dtvgt vgh 1-6. 路灯距地面的高度为1h ,一身高为2h 的人在路灯下以匀速1v 沿直线行走。
大学物理第四章课后答案
υ2 l
9. 解: m 下降到斜面瞬间满足机械能守恒: 1 则 mgh = mυ 0 2 2 M 与 m 碰撞后无机械能损失: 1 1 1 mυ 0 2 = Mυ 2 + mυ ′ 2 2 2 2 水平方向 M 与 m 组成的系统动量守恒, 总动量 为 0, Mυ = m υ ′ 解得: υ = 2m 2 gh M ( M + m)
如图所示在一铅直面内有一光滑的轨道左边是一个上升的曲线右边是足够长的水平直线两者平滑连接现有b两个质点b在水平轨道上静止a在曲线部分高h处由静止滑下与b发生完全弹性碰撞碰后a仍可返回上升到曲线轨道某处并再度滑下已知ab两质点的质量a分别为和
自治区精品课程—大学物理学
题库
第四章 动量定理
一、 填空 1. 2. 3. 4. 是表示力在空间上累积作用的物理量, 是表示力在时间上累 积作用的物理量。 质点动量定理的微分形式是 。 质点动量定理的积分形式是 。 对于质点系来说,内力 ( “改变”或“不改变” )质点系中各个质点 的动量,但 ( “改变”或“不改变” )质点系的总动量。 若质点系沿某坐标方向所受的合外力为零,则 守恒。 如果两物体碰撞过程中,动能完全没有损失,这种碰撞称为 ,否则 就称为 ;如果碰撞后两物体以相同的速度运动,这种碰撞称 为 。 , 其中 υ10 ,υ1 是某一物
-1-
自治区精品课程—大学物理学
题库
上,如图所示。求链条下落在地面的长度为 l 瞬时,地面所受链条的作用力的大 小。 4. 质量为 M 的人,手里拿着一个质量为 m 的物体,此人以与地平面成 α 角的速 度 υ0 向前方跳起,当他达到最高点时,将物体以相对速度 µ 水平向后抛出,由 于物体的抛出,人跳的距离增加多少?假设空气阻力不计。 5. 速度为 υ0 的物体甲和一个质量为甲的 2 倍的静止物体乙作对心碰撞,碰撞后 1 甲物体以 υ 0 的速度沿原路径弹回,求: 3 (1)乙物体碰撞后的速度,问这碰撞是完全弹性碰撞吗? (2) 如果碰撞是完全非弹性碰撞, 碰撞后两物体的速度为多大?动能损失多少? 6. 如图所示,质量为 m 的物体从斜面上高度为 h 的 A 点处由静止开始下滑,滑至水平段 B 点 停止,今有一质量 m 的子弹射入物体中,使物 体恰好能返回到斜面上的 A 点处。求子弹的速 度( AB 段摩擦因数为恒量) 。 7. 如图所示,劲度系数 k = 100 N m 的弹簧, 一 段固 定于 O 点, 另一端 与一 质量 为
大学物理第四章习题及答案
大学物理第四章习题及答案大学物理第四章习题及答案第四章是大学物理课程中的重要章节,主要涉及力学和运动学的内容。
在这一章中,学生将学习到关于运动的基本概念和原理,以及如何应用这些知识解决实际问题。
为了帮助学生更好地理解和掌握这一章节的知识,以下是一些常见的习题及其答案。
习题一:一个物体以10 m/s的速度从10 m高的斜面上滑下,滑到底部时的速度是多少?解答:根据能量守恒定律,物体在滑下过程中,其机械能守恒。
由于没有外力做功,物体的机械能在滑下过程中保持不变。
因此,物体在滑到底部时的机械能等于初始机械能。
初始机械能 = 动能 + 重力势能= 1/2 mv^2 + mgh根据题目给出的条件,可得:1/2 mv^2 + mgh = 1/2 m(10)^2 + m(10)(10)= 50m + 100m= 150m因此,滑到底部时的速度为10 m/s。
习题二:一个物体以10 m/s的速度从斜面上滑下,滑到底部时的时间是多少?解答:根据运动学中的运动方程,可以求解物体滑下斜面所用的时间。
在这个问题中,物体的初速度为0,加速度为重力加速度g,位移为斜面的长度L。
根据运动方程:S = ut + 1/2 at^2L = 0 + 1/2 gt^22L = gt^2t^2 = 2L/gt = sqrt(2L/g)根据题目给出的条件,斜面的长度L为10 m,重力加速度g为10 m/s^2,代入上述公式可得:t = sqrt(2(10)/10)= sqrt(2)≈ 1.414 s因此,滑到底部时的时间约为1.414秒。
习题三:一个物体以10 m/s的速度从斜面上滑下,滑到底部时的加速度是多少?解答:根据牛顿第二定律,物体在斜面上滑动时受到的合力等于物体的质量乘以加速度。
在这个问题中,物体的质量为m,斜面的倾角为θ,重力加速度为g。
合力 = m * 加速度m * g * sinθ = m * 加速度加速度= g * sinθ根据题目给出的条件,斜面的倾角θ为30度,重力加速度g为10 m/s^2,代入上述公式可得:加速度= 10 * sin(30°)≈ 5 m/s^2因此,滑到底部时的加速度约为5 m/s^2。
大学物理习题答案解析第四章

第四章刚体的转动4-1有两个力作用在一个有固定转轴的刚体上:(1) 这两个力都平行于轴作用时,它们对轴的合力矩一定是零;(2) 这两个力都垂直于轴作用时,它们对轴的合力矩可能是零;(3) 当这两个力的合力为零时,它们对轴的合力矩也一定是零;(4) 当这两个力对轴的合力矩为零时,它们的合力也一定是零.对上述说法下述判断正确的是( )(A) 只有(1)是正确的(B)(1)、(2)正确,(3)、(4)错误(C) (1)、(2)、(3)都正确,(4)错误 (D)(1)、(2)、(3)、(4)都正确分析与解力对轴之力矩通常有三种情况:其中两种情况下力矩为零:一是力的作用线通过转轴,二是力平行于转轴(例如门的重力并不能使门转).不满足上述情况下的作用力(含题述作用力垂直于转轴的情况)对轴之矩不为零,但同时有两个力作用时,只要满足两力矩大小相等,方向相反,两力矩对同一轴的合外力矩也可以为零,由以上规则可知(1)(2)说法是正确.对于(3)(4)两种说法,如作用于刚体上的两个力为共点力,当合力为零时,它们对同一轴的合外力矩也一定为零,反之亦然.但如这两个力为非共点力,则以上结论不成立,故(3)(4)说法不完全正确.综上所述,应选(B).4-2关于力矩有以下几种说法:(1) 对某个定轴转动刚体而言,内力矩不会改变刚体的角加速度;(2) 一对作用力和反作用力对同一轴的力矩之和必为零;(3) 质量相等,形状和大小不同的两个刚体,在相同力矩的作用下,它们的运动状态一定相同.对上述说法下述判断正确的是( )(A) 只有(2)是正确的 (B) (1)、(2)是正确的(C)(2)、(3)是正确的 (D) (1)、(2)、(3)都是正确的分析与解刚体中相邻质元之间的一对内力属于作用力与反作用力,且作用点相同,故对同一轴的力矩之和必为零,因此可推知刚体中所有内力矩之和为零,因而不会影响刚体的角加速度或角动量等,故(1)(2)说法正确.对说法(3)来说,题述情况中两个刚体对同一轴的转动惯量因形状、大小不同有可能不同,因而在相同力矩作用下,产生的角加速度不一定相同,因而运动状态未必相同,由此可见应选(B).4-3均匀细棒OA可绕通过其一端O而与棒垂直的水平固定光滑轴转动,如图所示,今使棒从水平位置由静止开始自由下落,在棒摆到竖直位置的过程中,下述说法正确的是( )(A) 角速度从小到大,角加速度不变(B) 角速度从小到大,角加速度从小到大(C) 角速度从小到大,角加速度从大到小(D) 角速度不变,角加速度为零分析与解 如图所示,在棒下落过程中,重力对轴之矩是变化的,其大小与棒和水平面的夹角有关.当棒处于水平位置,重力矩最大,当棒处于竖直位置时,重力矩为零.因此在棒在下落过程中重力矩由大到小,由转动定律知,棒的角加速亦由大到小,而棒的角速度却由小到大(由机械能守恒亦可判断角速度变化情况),应选(C ). 4 -4 一圆盘绕通过盘心且垂直于盘面的水平轴转动,轴间摩擦不计.如图射来两个质量相同,速度大小相同,方向相反并在一条直线上的子弹,它们同时射入圆盘并且留在盘内,则子弹射入后的瞬间,圆盘和子弹系统的角动量L 以及圆盘的角速度ω的变化情况为( ) (A ) L 不变,ω增大 (B ) 两者均不变 (C ) L 不变,ω减小 (D ) 两者均不确定分析与解 对于圆盘一子弹系统来说,并无外力矩作用,故系统对轴O 的角动量守恒,故L 不变,此时应有下式成立,即式中m v D 为子弹对点O 的角动量ω0 为圆盘初始角速度,J 为子弹留在盘中后系统对轴O 的转动惯量,J 0为子弹射入前盘对轴O 的转动惯量.由于J >J 0 ,则ω<ω0 .故选(C ).4 -5 假设卫星环绕地球中心作椭圆运动,则在运动过程中,卫星对地球中心的( ) (A ) 角动量守恒,动能守恒 (B ) 角动量守恒,机械能守恒 (C ) 角动量不守恒,机械能守恒 (D ) 角动量不守恒,动量也不守恒 (E) 角动量守恒,动量也守恒分析与解 由于卫星一直受到万有引力作用,故其动量不可能守恒,但由于万有引力一直指向地球中心,则万有引力对地球中心的力矩为零,故卫星对地球中心的角动星守恒,即r ×m v =恒量,式中r 为地球中心指向卫星的位矢.当卫星处于椭圆轨道上不同位置时,由于|r |不同,由角动量守恒知卫星速率不同,其中当卫星处于近地点时速率最大,处于远地点时速率最小,故卫星动能并不守恒,但由万有引力为保守力,则卫星的机械能守恒,即卫星动能与万有引力势能之和维持不变,由此可见,应选(B ).4 -6 一汽车发动机曲轴的转速在12 s 内由1.2×103 r·min -1均匀的增加到2.7×103 r·min -1.(1) 求曲轴转动的角加速度;(2) 在此时间内,曲轴转了多少转?分析这是刚体的运动学问题.刚体定轴转动的运动学规律与质点的运动学规律有类似的关系,本题为匀变速转ωJ ωJ d m d m =+-00vv动.解 (1) 由于角速度ω=2π n (n 为单位时间内的转数),根据角加速度的定义,在匀变速转动中角加速度为(2) 发动机曲轴转过的角度为在12 s 内曲轴转过的圈数为圈 4 -7 某种电动机启动后转速随时间变化的关系为,式中ω0=9.0 s -1 ,τ=2 s .求:(1) t =6.0 s 时的转速;(2) 角加速度随时间变化的规律;(3) 启动后6.0 s 内转过的圈数.分析 与质点运动学相似,刚体定轴转动的运动学问题也可分为两类:(1) 由转动的运动方程,通过求导得到角速度、角加速度;(2) 在确定的初始条件下,由角速度、角加速度通过积分得到转动的运动方程.本题由ω=ω(t )出发,分别通过求导和积分得到电动机的角加速度和6.0 s 内转过的圈数. 解 (1) 根据题意中转速随时间的变化关系,将t =6.0 s 代入,即得(2) 角速度随时间变化的规律为(3) t =6.0 s 时转过的角度为则t =6.0 s 时电动机转过的圈数圈4 -8 水分子的形状如图所示,从光谱分析知水分子对AA ′ 轴的转动惯量J AA′=1.93 ×10-47 kg·m 2 ,对BB ′ 轴转动惯量J BB′=1.14 ×10-47 kg·m 2,试由此数据和各原子质量求出氢和氧原子的距离D 和夹角θ.假设各原子都可当质点处理.tωαd d =()200s rad 1.13π2-⋅=-=-=tn n t ωωα()0020π221n n t ωωt αt ωθ-=-=+=3902π20=+==t n n θN ()τt e ωω/01--=()10/0s 6.895.01--==-=ωe ωωτt ()22//0s rad e 5.4e d d ---⋅===t τt τωt ωα()rad 9.36d 1d /6060=-==-⎰⎰t e ωt ωθτt 87.5π2/==θN分析 如将原子视为质点,则水分子中的氧原子对AA ′轴和BB ′ 轴的转动惯量均为零,因此计算水分子对两个轴的转动惯量时,只需考虑氢原子即可. 解 由图可得此二式相加,可得 则由二式相比,可得 则 4 -9 一飞轮由一直径为30㎝,厚度为2.0㎝的圆盘和两个直径为10㎝,长为8.0㎝的共轴圆柱体组成,设飞轮的密度为7.8×103 kg·m -3,求飞轮对轴的转动惯量.分析 根据转动惯量的可叠加性,飞轮对轴的转动惯量可视为圆盘与两圆柱体对同轴的转动惯量之和;而匀质圆盘、圆柱体对轴的转动惯量的计算可查书中公式,或根据转动惯量的定义,用简单的积分计算得到. 解 根据转动惯量的叠加性,由匀质圆盘、圆柱体对轴的转动惯量公式可得θd m J H A A 22sin 2='θd m J H B B 22cos 2='22d m J J H B B A A =+''m 1059.9211-''⨯=+=HB B A A m J J d θJ J B B A A 2tan /=''o 3.521.141.93arctan arctan===''B B A A J Jθ4 -10 如图(a )所示,圆盘的质量为m ,半径为R .求:(1) 以O 为中心,将半径为R /2 的部分挖去,剩余部分对OO 轴的转动惯量;(2) 剩余部分对O ′O ′轴(即通过圆盘边缘且平行于盘中心轴)的转动惯量.分析 由于转动惯量的可加性,求解第一问可有两种方法:一是由定义式计算,式中d m 可取半径为r 、宽度为d r 窄圆环;二是用补偿法可将剩余部分的转动惯量看成是原大圆盘和挖去的小圆盘对同一轴的转动惯量的差值.至于第二问需用到平行轴定理. 解 挖去后的圆盘如图(b )所示. (1) 解1 由分析知解2 整个圆盘对OO 轴转动惯量为,挖去的小圆盘对OO 轴转动惯量,由分析知,剩余部分对OO 轴的转动惯量为(2) 由平行轴定理,剩余部分对O ′O ′轴的转动惯量为4 -11 用落体观察法测定飞轮的转动惯量,是将半径为R 的飞轮支承在O 点上,然后在绕过飞轮的绳子的一端挂一质量为m 的重物,令重物以初速度为零下落,带动飞轮转动(如图).记下重物下落的距离和时间,就可算出飞轮的转动惯量.试写出它的计算式.(假设轴承间无摩擦).2424122221121m kg 136.021π161 2212212⋅=⎪⎭⎫⎝⎛+=⎪⎭⎫⎝⎛+⎪⎭⎫ ⎝⎛⨯=+=ad ld ρd m d m J JJ m r J d 2⎰=22/3222/2203215d 2 d π2πd mR r r R m rr R mr m r J R R RR ====⎰⎰⎰2121mR J =2222232122ππ21mR R R Rm J =⎪⎭⎫ ⎝⎛⎥⎥⎦⎤⎢⎢⎣⎡⎪⎭⎫⎝⎛=22103215mR J J J =-=22222032392ππ3215mR R R R m m mR J =⎥⎥⎦⎤⎢⎢⎣⎡⎪⎭⎫ ⎝⎛⋅-+='分析 在运动过程中,飞轮和重物的运动形式是不同的.飞轮作定轴转动,而重物是作落体运动,它们之间有着内在的联系.由于绳子不可伸长,并且质量可以忽略.这样,飞轮的转动惯量,就可根据转动定律和牛顿定律联合来确定,其中重物的加速度,可通过它下落时的匀加速运动规律来确定.该题也可用功能关系来处理.将飞轮、重物和地球视为系统,绳子张力作用于飞轮、重物的功之和为零,系统的机械能守恒.利用匀加速运动的路程、速度和加速度关系,以及线速度和角速度的关系,代入机械能守恒方程中即可解得.解1 设绳子的拉力为F T,对飞轮而言,根据转动定律,有(1)而对重物而言,由牛顿定律,有(2)由于绳子不可伸长,因此,有(3)重物作匀加速下落,则有(4) 由上述各式可解得飞轮的转动惯量为解2 根据系统的机械能守恒定律,有(1′)而线速度和角速度的关系为(2′)又根据重物作匀加速运动时,有(3′)(4′)由上述各式可得αJ R F T =ma F mg T =-αR a =221at h =⎪⎪⎭⎫⎝⎛-=1222h gt mR J 0212122=++-ωJ m mgh v ωR =v at =v ah 22=v ⎪⎪⎭⎫⎝⎛-=1222h gt mR J若轴承处存在摩擦,上述测量转动惯量的方法仍可采用.这时,只需通过用两个不同质量的重物做两次测量即可消除摩擦力矩带来的影响.4 -12 一燃气轮机在试车时,燃气作用在涡轮上的力矩为2.03×03N·m ,涡轮的转动惯量为25.0kg·m 2 .当轮的转速由2.80×103 r·min -1 增大到1.12×104 r·min -1时,所经历的时间t 为多少?分析 由于作用在飞轮上的力矩是恒力矩,因此,根据转动定律可知,飞轮的角加速度是一恒量;又由匀变速转动中角加速度与时间的关系,可解出飞轮所经历的时间.该题还可应用角动量定理直接求解. 解1 在匀变速转动中,角加速度,由转动定律,可得飞轮所经历的时间 解2 飞轮在恒外力矩作用下,根据角动量定理,有则 4 -13 如图(a ) 所示,质量m 1 =16 kg 的实心圆柱体A ,其半径为r =15 cm ,可以绕其固定水平轴转动,阻力忽略不计.一条轻的柔绳绕在圆柱体上,其另一端系一个质量m 2 =8.0 kg 的物体B .求:(1) 物体B 由静止开始下降1.0 s 后的距离;(2) 绳的张力F T .分析 该系统的运动包含圆柱体的转动和悬挂物的下落运动(平动).两种不同的运动形式应依据不同的动力学方程去求解,但是,两物体的运动由柔绳相联系,它们运动量之间的联系可由角量与线量的关系得到. 解 (1) 分别作两物体的受力分析,如图(b ).对实心圆柱体而言,由转动定律得t ωωα0-=αJ M =()s 8.10200=-=-=n n MJπJ M ωωt ()0d ωωJ t M t-=⎰()s 8.10π200=-=-=n n MJJ M ωωt对悬挂物体而言,依据牛顿定律,有且F T =F T′ .又由角量与线量之间的关系,得解上述方程组,可得物体下落的加速度在t =1.0 s 时,B 下落的距离为(2) 由式(2)可得绳中的张力为4 -14 质量为m 1 和m 2 的两物体A 、B 分别悬挂在图(a )所示的组合轮两端.设两轮的半径分别为R 和r ,两轮的转动惯量分别为J 1 和J 2 ,轮与轴承间、绳索与轮间的摩擦力均略去不计,绳的质量也略去不计.试求两物体的加速度和绳的张力.分析 由于组合轮是一整体,它的转动惯量是两轮转动惯量之和,它所受的力矩是两绳索张力矩的矢量和(注意两αr m αJ r F T 2121==a m F g m F P T T 222='-='-αr a =21222m m gm a +=m 45.222121222=+==m m gt m at s ()N 2.3922121=+=-=g m m m m a g m FT力矩的方向不同).对平动的物体和转动的组合轮分别列出动力学方程,结合角加速度和线加速度之间的关系即可解得.解 分别对两物体及组合轮作受力分析,如图(b ).根据质点的牛顿定律和刚体的转动定律,有(1) (2)(3) , (4)由角加速度和线加速度之间的关系,有(5) (6)解上述方程组,可得4 -15 如图所示装置,定滑轮的半径为r ,绕转轴的转动惯量为J ,滑轮两边分别悬挂质量为m 1 和m 2 的物体A 、B .A 置于倾角为θ 的斜面上,它和斜面间的摩擦因数为μ,若B 向下作加速运动时,求:(1) 其下落加速度的大小;(2) 滑轮两边绳子的张力.(设绳的质量及伸长均不计,绳与滑轮间无滑动,滑轮轴光滑.)分析 这是连接体的动力学问题,对于这类问题仍采用隔离体的方法,从受力分析着手,然后列出各物体在不同运动形式下的动力学方程.物体A 和B 可视为质点,则运用牛顿定律.由于绳与滑轮间无滑动,滑轮两边绳中的张力是不同的,滑轮在力矩作用下产生定轴转动,因此,对滑轮必须运用刚体的定轴转动定律.列出动力学方程,并考虑到角量与线量之间的关系,即能解出结果来.解 作A 、B 和滑轮的受力分析,如图(b ).其中A 是在张力F T1 、重力P 1 ,支持力F N 和摩擦力F f 的作用下运动,根据牛顿定律,沿斜面方向有(1)111111a m F g m F P T T =-='-222222a m g m F P F T T =-=-'()αJ J r F R F T T 2121+=-11T T F F ='22T T F F ='αR a =1αr a =2gR r m R m J J rm R m a 222121211+++-=gr rm R m J J rm R m a 222121212+++-=g m r m R m J J Rr m r m J J F T 1222121221211++++++=g m r m R m J J Rr m R m J J F T 2222121121212++++++=11111cos sin a m θg m μθg m F T =--而B 则是在张力F T2 和重力P 2 的作用下运动,有(2)由于绳子不能伸长、绳与轮之间无滑动,则有(3)对滑轮而言,根据定轴转动定律有(4) , (5)解上述各方程可得4 -16 如图(a )所示,飞轮的质量为60 kg ,直径为0.50 m ,转速为1.0 ×103 r·min -1 .现用闸瓦制动使其在5.0 s 内停止转动,求制动力F .设闸瓦与飞轮之间的摩擦因数 μ=0.40,飞轮的质量全部分布在轮缘上.2222a m F g m T =-αr a a ==21αJ r F r F T T ='-'1211T T F F ='22T T F F ='22111221cos sin rJm m θg m μθg m g m a a ++--==()()22121211//cos sin cos sin 1rJ m m r gJ m θμθθμθg m m F T ++++++=()22122212//cos sin 1rJ m m r gJ m θμθg m m F T +++++=分析 飞轮的制动是闸瓦对它的摩擦力矩作用的结果,因此,由飞轮的转动规律可确定制动时所需的摩擦力矩.但是,摩擦力矩的产生与大小,是由闸瓦与飞轮之间的正压力F N 决定的,而此力又是由制动力F 通过杠杆作用来实现的.所以,制动力可以通过杠杆的力矩平衡来求出.解 飞轮和闸杆的受力分析,如图(b )所示.根据闸杆的力矩平衡,有而,则闸瓦作用于轮的摩擦力矩为 (1) 摩擦力矩是恒力矩,飞轮作匀角加速转动,由转动的运动规律,有(2) 因飞轮的质量集中于轮缘,它绕轴的转动惯量,根据转动定律,由式(1)、(2)可得制动力()0121='-+l F l l F NNN F F '=d μF l ll d μF d F M N 121f2212+===tnt ωt ωωαπ200==-=4/2md J =αJ M =4 -17 一半径为R 、质量为m 的匀质圆盘,以角速度ω绕其中心轴转动,现将它平放在一水平板上,盘与板表面的摩擦因数为μ.(1) 求圆盘所受的摩擦力矩.(2) 问经多少时间后,圆盘转动才能停止?分析 转动圆盘在平板上能逐渐停止下来是由于平板对其摩擦力矩作用的结果.由于圆盘各部分所受的摩擦力的力臂不同,总的摩擦力矩应是各部分摩擦力矩的积分.为此,可考虑将圆盘分割成许多同心圆环,取半径为r 、宽为d r 的圆环为面元,环所受摩擦力d F f =2πr μmg d r /πR 2 ,其方向均与环的半径垂直,因此,该圆环的摩擦力矩d M =r ×d F f ,其方向沿转动轴,则圆盘所受的总摩擦力矩M =∫ d M .这样,总的摩擦力矩的计算就可通过积分来完成.由于摩擦力矩是恒力矩,则由角动量定理M Δt =Δ(Jω),可求得圆盘停止前所经历的时间Δt .当然也可由转动定律求解得.解 (1) 由分析可知,圆盘上半径为r 、宽度为d r 的同心圆环所受的摩擦力矩为式中k 为轴向的单位矢量.圆盘所受的总摩擦力矩大小为(2) 由于摩擦力矩是一恒力矩,圆盘的转动惯量J =mR 2/2 .由角动量定理M Δt =Δ(Jω),可得圆盘停止的时间为4 -18 如图所示,一通风机的转动部分以初角速度ω0 绕其轴转动,空气的阻力矩与角速度成正比,比例系数C 为一常量.若转动部分对其轴的转动惯量为J ,问:(1) 经过多少时间后其转动角速度减少为初角速度的一半?(2) 在此时间内共转过多少转?分析 由于空气的阻力矩与角速度成正比,由转动定律可知,在变力矩作用下,通风机叶片的转动是变角加速转动,因此,在讨论转动的运动学关系时,必须从角加速度和角速度的定义出发,通过积分的方法去解. 解 (1) 通风机叶片所受的阻力矩为M =-Cω,由转动定律M =Jα,可得叶片的角加速度为(1) 根据初始条件对式(1)积分,有()N 1014.32211⨯=+=tl l μnmdl πF ()k F r M 22f /d 2d R r mg μr d -=⨯=mgR μr R mg μr M M R32d 2d 022===⎰⎰gμR ωM ωJ t 43Δ==JωC t ωα-==d d t J C ωωt ωωd d 00⎰⎰-=由于C 和J 均为常量,得(2)当角速度由ω0 → 12 ω0 时,转动所需的时间为(2) 根据初始条件对式(2)积分,有即 在时间t 内所转过的圈数为4 -19 如图所示,一长为2l 的细棒AB ,其质量不计,它的两端牢固地联结着质量各为m 的小球,棒的中点O 焊接在竖直轴z 上,并且棒与z 轴夹角成α角.若棒在外力作用下绕z 轴(正向为竖直向上)以角直速度ω=ω0(1 -e -t) 转动,其中ω0 为常量.求(1)棒与两球构成的系统在时刻t 对z 轴的角动量;(2) 在t =0时系统所受外力对z 轴的合外力矩.分析 由于棒的质量不计,该系统对z 轴的角动量即为两小球对z 轴的角动量之和,首先可求出系统对z 轴的转动惯量(若考虑棒的质量,其转动惯量为多少,读者可自己想一想),系统所受合外力矩既可以运用角动量定理,也可用转动定律来求解.相比之下,前者对本题更直接.解 (1) 两小球对z 轴的转动惯量为,则系统对z 轴的角动量为此处也可先求出每个小球对z 轴的角动量后再求和. (2) 由角动量定理得J Ct e ωω/0-=2ln CJt =t e ωθJ Ct tθd d /000-⎰⎰=CωJ θ20=CωJ θN π4π20==()()222sin 2sin 22αl m αl m mr J ===()αe ωml mr ωJ L t 2022sin 122--===t =0时,合外力矩为此处也可先求解系统绕z 轴的角加速度表达式,即,再由M =Jα求得M . 4 -20 一质量为m′、半径为R 的均匀圆盘,通过其中心且与盘面垂直的水平轴以角速度ω转动,若在某时刻,一质量为m 的小碎块从盘边缘裂开,且恰好沿垂直方向上抛,问它可能达到的高度是多少? 破裂后圆盘的角动量为多大?分析 盘边缘裂开时,小碎块以原有的切向速度作上抛运动,由质点运动学规律可求得上抛的最大高度.此外,在碎块与盘分离的过程中,满足角动量守恒条件,由角动量守恒定律可计算破裂后盘的角动量.解 (1) 碎块抛出时的初速度为由于碎块竖直上抛运动,它所能到达的高度为(2) 圆盘在裂开的过程中,其角动量守恒,故有式中为圆盘未碎时的角动量;为碎块被视为质点时,碎块对轴的角动量;L 为破裂后盘的角动量.则4 -21 在光滑的水平面上有一木杆,其质量m 1 =1.0 kg ,长l =40cm ,可绕通过其中点并与之垂直的轴转动.一质量为m 2 =10g 的子弹,以v =2.0×102 m · s -1 的速度射入杆端,其方向与杆及轴正交.若子弹陷入杆中,试求所得到的角速度.()[]αe ωml tt L M t 202sin 12d d d d --==t e αωml -=202sin 2αωml M 202sin 2=t e ωtωα-==0dd R ω=0v gR ωg h 222220==v L L L '-=0ωR m L 221'=ωmR L 2='ωR m m L 221⎪⎭⎫⎝⎛-'=分析 子弹与杆相互作用的瞬间,可将子弹视为绕轴的转动.这样,子弹射入杆前的角速度可表示为ω,子弹陷入杆后,它们将一起以角速度ω′ 转动.若将子弹和杆视为系统,因系统不受外力矩作用,故系统的角动量守恒.由角动量守恒定律可解得杆的角速度. 解 根据角动量守恒定理式中为子弹绕轴的转动惯量,J 2ω为子弹在陷入杆前的角动量,ω=2v/l 为子弹在此刻绕轴的角速度.为杆绕轴的转动惯量.可得杆的角速度为4 -22 半径分别为r 1 、r 2 的两个薄伞形轮,它们各自对通过盘心且垂直盘面转轴的转动惯量为J 1 和J 2 .开始时轮Ⅰ以角速度ω0 转动,问与轮Ⅱ成正交啮合后(如图所示),两轮的角速度分别为多大?分析 两伞型轮在啮合过程中存在着相互作用力,这对力分别作用在两轮上,并各自产生不同方向的力矩,对转动的轮Ⅰ而言是阻力矩,而对原静止的轮Ⅱ则是启动力矩.由于相互作用的时间很短,虽然作用力的位置知道,但作用力大小无法得知,因此,力矩是未知的.但是,其作用的效果可从轮的转动状态的变化来分析.对两轮分别应用角动量定理,并考虑到啮合后它们有相同的线速度,这样,啮合后它们各自的角速度就能求出. 解 设相互作用力为F ,在啮合的短时间Δt 内,根据角动量定理,对轮Ⅰ、轮Ⅱ分别有(1)(2)两轮啮合后应有相同的线速度,故有(3)()ωJ J ωJ '+=212()2222/l m J =12/211l m J =()1212212s 1.2936-=+=+='m m m J J ωJ ωv()0111ΔωωJ t F r -=-222ΔωJ t F r =2211ωr ωr =由上述各式可解得啮合后两轮的角速度分别为4 -23 一质量为20.0 kg 的小孩,站在一半径为3.00 m 、转动惯量为450 kg· m 2 的静止水平转台的边缘上,此转台可绕通过转台中心的竖直轴转动,转台与轴间的摩擦不计.如果此小孩相对转台以1.00 m· s -1 的速率沿转台边缘行走,问转台的角速率有多大?分析 小孩与转台作为一定轴转动系统,人与转台之间的相互作用力为内力,沿竖直轴方向不受外力矩作用,故系统的角动量守恒.在应用角动量守恒时,必须注意人和转台的角速度ω、ω0 都是相对于地面而言的,而人相对于转台的角速度ω1 应满足相对角速度的关系式 . 解 由相对角速度的关系,人相对地面的角速度为由于系统初始是静止的,根据系统的角动量守恒定律,有式中J 0 、J 1 =mR 2 分别为转台、人对转台中心轴的转动惯量.由式(1)、(2)可得转台的角速度为式中负号表示转台转动的方向与人对地面的转动方向相反.4 -24 一转台绕其中心的竖直轴以角速度ω0 =πs -1 转动,转台对转轴的转动惯量为J 0 =4.0 ×10-3 kg· m 2 .今有砂粒以Q =2t g· s -1 的流量竖直落至转台,并粘附于台面形成一圆环,若环的半径为r =0.10 m ,求砂粒下落t =10 s 时,转台的角速度.分析 对转动系统而言,随着砂粒的下落,系统的转动惯量发生了改变.但是,砂粒下落对转台不产生力矩的作用,因此,系统在转动过程中的角动量是守恒的.在时间t 内落至台面的砂粒的质量,可由其流量求出,从而可算出它所引起的附加的转动惯量.这样,转台在不同时刻的角速度就可由角动量守恒定律求出. 解 在时间0→10 s 内落至台面的砂粒的质量为根据系统的角动量守恒定律,有则t =10 s 时,转台的角速度4 -25 为使运行中的飞船停止绕其中心轴的转动,可在飞船的侧面对称地安装两个切向控制喷管(如图所示),利用喷管高速喷射气体来制止旋转.若飞船绕其中心轴的转动惯量J =2.0 ×103kg· m 2 ,旋转的角速度ω=0.2 rad· s -1 ,喷口与轴线之间的距离r =1.5 m ;喷气以恒定的流量Q =1.0 kg· s -1和速率u =50 m· s -1 从喷口喷出,问为使该飞船停止旋转,喷气应喷射多长时间?分析 将飞船与喷出的气体作为研究系统,在喷气过程中,系统不受外力矩作用,其角动量守恒.在列出方程时应注意:(1) 由于喷气质量远小于飞船质量,喷气前、后系统的角动量近似为飞船的角动量J ω;(2) 喷气过210222122011r ωJ r J r ωJ ω+=10ωωω+=Rωωωωv+=+=010()010100=++ωωJ ωJ 122020s 1052.9--⨯-=+-=RmR J mR ωv kg 10.0Qd s100==⎰t m ()ωmr J ωJ 2000+=112000s π80.0-=+=J mrJ ωJ ω程中气流速率u 远大于飞船侧面的线速度ωr ,因此,整个喷气过程中,气流相对于空间的速率仍可近似看作是 u ,这样,排出气体的总角动量.经上述处理后,可使问题大大简化.解 取飞船和喷出的气体为系统,根据角动量守恒定律,有(1)因喷气的流量恒定,故有(2)由式(1)、(2)可得喷气的喷射时间为4 -26 一质量为m′、半径为R 的转台,以角速度ωA 转动,转轴的摩擦略去不计.(1) 有一质量为m 的蜘蛛垂直地落在转台边缘上.此时,转台的角速度ωB 为多少? (2) 若蜘蛛随后慢慢地爬向转台中心,当它离转台中心的距离为r 时,转台的角速度ωc 为多少? 设蜘蛛下落前距离转台很近.分析 对蜘蛛和转台所组成的转动系统而言,在蜘蛛下落至转台面以及慢慢向中心爬移过程中,均未受到外力矩的作用,故系统的角动量守恒.应该注意的是,蜘蛛爬行过程中,其转动惯量是在不断改变的.由系统的角动量守恒定律即可求解.解 (1) 蜘蛛垂直下落至转台边缘时,由系统的角动量守恒定律,有式中为转台对其中心轴的转动惯量,为蜘蛛刚落至台面边缘时,它对轴的转动惯量.于是可得(2) 在蜘蛛向中心轴处慢慢爬行的过程中,其转动惯量将随半径r 而改变, 即.在此过程中,由系统角动量守恒,有4 -27 一质量为1.12 kg ,长为1.0 m 的均匀细棒,支点在棒的上端点,开始时棒自由悬挂.以100 N 的力打击它的下端点,打击时间为0.02 s .(1) 若打击前棒是静止的,求打击时其角动量的变化;(2) 棒的最大偏转角.()mur m r ωu m≈+⎰d 0=-mur ωJ Qt m 2=s 67.22==QurωJ t ()b a ωJ J ωJ 100+=2021R m J '=21mR J =a a b ωmm m ωJ J J ω2100+''=+=22mr J =()c a ωJ J ωJ 100+=。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第4章机械振动4.1基本要求1.掌握描述简谐振动的振幅、周期、频率、相位和初相位的物理意义及之间的相互关系2.掌握描述简谐振动的解析法、旋转矢量法和图线表示法,并会用于简谐振动规律的讨论和分析3.掌握简谐振动的基本特征,能建立一维简谐振动的微分方程,能根据给定的初始条件写出一维简谐振动的运动方程,并理解其物理意义4.理解同方向、同频率简谐振动的合成规律,了解拍和相互垂直简谐振动合成的特点4.2基本概念1.简谐振动离开平衡位置的位移按余弦函数(或正弦函数)规律随时间变化的运动称为简谐振动。
简谐振动的运动方程cos()x A t ωϕ=+2.振幅A 作简谐振动的物体的最大位置坐标的绝对值。
3.周期T 作简谐振动的物体完成一次全振动所需的时间。
4.频率ν单位时间内完成的振动次数,周期与频率互为倒数,即1T ν=5.圆频率ω作简谐振动的物体在2π秒内完成振动的次数,它与频率的关系为22Tπωπν== 6.相位和初相位简谐振动的运动方程中t ωϕ+项称为相位,它决定着作简谐振动的物体状态;t=0时的相位称为初相位ϕ7.简谐振动的能量作简谐振动的系统具有动能和势能。
弹性势能222p 11cos ()22E kx kA t ωϕ==+ 动能[]22222k 111sin()sin ()222E m m A t m A t ωωϕωωϕ==-+=+v弹簧振子系统的机械能为222k p 1122E E E m A kA ω=+==8.阻尼振动振动系统因受阻尼力作用,振幅不断减小。
9.受迫振动系统在周期性外力作用下的振动。
周期性外力称为驱动力。
10.共振驱动力的角频率为某一值时,受迫振动的振幅达到极大值的现象。
4.3基本规律1.一个孤立的简谐振动系统的能量是守恒的物体做简谐振动时,其动能和势能都随时间做周期性变化,位移最大时,势能达到最大值,动能为零;物体通过平衡位置时,势能为零,动能达到最大值,但其总机械能却保持不变,且机械能与振幅的平方成正比。
图4.1表示了弹簧振子的动能和势能随时间的变化(0ϕ=)。
为了便于将此变化与位移随时间的变化相比较,在下面画了x-t 曲线,由图可以看出,动能和势能的变化频率是弹簧振子振动频率的两倍。
2.简谐振动的合成若一个质点同时参与了两个同方向、同频率的简谐振动,即111cos()x A t ωϕ=+ 222cos()x A t ωϕ=+合振动仍是一个角频率为ω的简谐振动。
合位移12cos()x x x A t ωϕ=+=+合振动的振幅A =合振动的初相11221122sin sin tan cos cos A A A A ϕϕϕϕϕ+=+图4.1 弹簧振子的动能和势能随时间的变化EpE OOxkE 212E kA =t t振动加强:212πk ϕϕϕ∆=-=±, (0 1 2,)k =,,12A A A =+ 振动减弱:21(21)πk ϕϕϕ∆=-=±-, ( 1, 2, 3)k =12A A A =- 当21ϕϕ-取其他值时1212A A A A A +>>-若两个振动同方向,但不同频率,则合成振动不再是周期振动,而是振幅随时间周期性变化的振动。
若两振动的振动方向相互垂直,频率相同。
一般情况下,合成振动轨迹为一椭圆。
若两个相互垂直的振动频率不相同,且为简单比关系,则其合成振动的轨迹为封闭的曲线,曲线的具体形状取决于两个振动的频率比。
若两频率比为无理数,则合成运动轨迹永不封闭。
4.4学习指导1.重点解析简谐振动的运动学问题是本章的重点内容之一,主要有以下两种类型: (1)已知简谐振动表达式求有关物理量(2)已知运动情况或振动曲线建立简谐振动表达式对于类型(1)主要采用比较法,就是把已知的振动表达式与简谐振动的一般表达式cos()x A t ωϕ=+加以比较,结合有关公式求得各物理量。
对于类型(2)的解题方法,一般是根据题给的条件,求出描述简谐振动的三个特征量A 、ϕ、ω,然后将这些量代入简谐振动的一般式,就得到要求的运动表达式。
其中角频率ω由系统的性质决定,2k mω=.振幅A 可由初始条件求出,A =初相ϕ有两种解法,一是解析法,即从初始条件得到0tan v x ϕω-=,这里ϕ有两个值,必须根据条件去掉一个不合理的值;另一是旋转矢量法,正确画出振幅矢量图,这是求初相最简便且直观的方法。
例如图4-2所示为某质点作简谐振动的曲线。
求该质点的振动方程。
图4-3图4-2分析:若要求质点的振动方程,必须求出三个特征量A 、ϕ、ω。
利用振动曲线可以看出2410A m -=⨯,t=0时刻,质点位移02x A =-,t=0.5s 时,x=0。
利用这些信息可以确定ϕ、ω。
解:方法1解析法 t=0时,02x A =-,于是有0cos x A A ϕ== 解得:34ϕπ=±由t=0时刻对应的曲线斜率0dxdt>可知,所以质点速度00v >,即: 0sin 0v A ωϕ=->所以34ϕπ=-为求ω,先写出质点振动方程23410cos()4x t m ωπ-=⨯-将t=0.5s ,x=0代入上式得3cos()024ωπ-=,同样结合该点的速度方向可以得到2πω=,所以质点的振动方程是23410cos()24x t m ππ-=⨯-方法2:旋转矢量法由振动曲线可知,t=0时刻,质点位移0x A =,质点速度00v >,对应的旋转矢量如图4-3所示,由图可知34ϕπ=-。
t=0.5s 时,x=0,0v >。
此运动状态对应矢量OP ,即旋转矢量由t=0时的OM 经0.5s 转至OP ,共转了4π,1140.52rad s rad s ππω--=⋅=⋅图4-4质点的振动方程是23410cos()24x t m ππ-=⨯-2.难点释疑 疑难点1旋转矢量自Ox 轴的原点O 作一矢量A ,使它的模等于振动的振幅A ,并使矢量A 在Oxy 平面内绕点O 作逆时针方向的匀角速转动,其角速度与振动的角频率ω相等,这个矢量就叫做旋转矢量。
如图4-4所示。
旋转矢量A 的矢端在Ox 轴上的投影点的运动,可表示物体在Ox 轴上的简谐振动。
旋转矢量A 与简谐振动的物理量之间的对应关系如表4-1所示。
表4-1旋转矢量A 与简谐振动的物理量之间的对应关系旋转矢量是研究简谐振动的一种比较直观的方法,可以使运动的各个物理量表现得直观,运动过程显示得清晰,有助于简化简谐振动讨论中的数学处理。
但必须指出,旋转矢量本身并不在作简谐振动,而是旋转矢量端点的投影点在作简谐振动。
问题:简谐振子从平衡位置运动到最远点所需的时间为4T吗?走过该距离的一半所需的时间是8T 吗?振子从平衡位置出发经历8T时运动的位移是多少? 解析从平衡位置运动到最远点对应旋转矢量图4-5中的角度变化是2π,所需的时间24T t πω∆== 振子的速度sin()v A t ωωϕ=-+不是常数,振子做变速直线运动,所以走过该距图4-5离的一半所需的时间不是8T 。
振子从平衡位置运动到2A处(OM 位置)时,振幅矢量转过了6π的角度,即612T t πω∆==即振子从平衡位置运动到2A 所用的时间是12T ,而不是8T 。
振子从2A运动到平衡位置所用的时间是36Tt πω∆==。
振子从平衡位置出发经历8T时运动的位移是cos()cos()824T x A A A ππω=-=-= 疑难点2当一个弹簧振子的振幅加倍时,则振动周期、最大速度、质点受力最大值和振动能量如何变化?解析弹簧振子的振幅一般由初始条件确定。
振幅加倍时,振动周期不变,因为对于给定的弹簧振子系统其周期是一定的,即2T =最大速度的表达式是A ω,所以振幅加倍时最大速度也加倍,质点受力最大值为f=kA ,所以振幅加倍时受力最大值也加倍;简谐振动系统中机械能守恒为212E kA =,所以振幅加倍时振动能量变为原来4倍4.5习题解答4.1两根轻弹簧和一质量为m 的物体组成一振动系统,弹簧的劲度系数为k 1和k 2,串联后与物体相接,则此系统的固有频率为ν等于[] (A)()π2//)(21m k k +)2π (C)()π2)/(21k k m +(2)π 解析:正确答案(B )两弹簧k 1和k 2串联后可等效为劲度系数k 的弹簧,设k 1和k 2的形变量分别为Δx 1和Δx 2,k 的形变量为Δx ,则有Δx =Δx 1+Δx 2,亦即1 习题4.1图12111k k k =+ 1212k k k k k =+ 据此可确定系统的固有频率为)2νπ==4.2把单摆摆球从平衡位置向位移正方向拉开,使摆线与竖直方向成一微小角度θ,然后由静止放手任其振动,从放手时开始计时。
若用余弦函数表示其运动方程,则该单摆振动的初相为[] (A)π(B)π/2 (C)0(D)θ解析:正确答案(C )由已知条件可知其初始时刻的位移正向最大。
利用旋转矢量图可知,初相相位是0。
选(C )4.3用余弦函数描述一简谐振动。
已知振幅为A ,周期为T ,初相3πϕ=-,则振动曲线为[]解析:正确答案(A )由已知条件可知:初始时刻振动的位移是cos()32Ay A π=-=,速度是sin()2v A t A ωωϕ=-+=,方向是向y 轴正方向,则振动曲线上t=0时刻的斜率是正值。
4.4已知某简谐振动的振动曲线如图所示,位移习题4.3图习题4.4图的单位为厘米,时间单位为秒。
则此简谐振动的振动方程为:[](A )222cos()33x t ππ=+cm(B )222cos()33x t ππ=-cm(C )422cos()33x t ππ=-cm(D )422cos()33x t ππ=+cm解析:正确答案(D )由振动图像可知,初始时刻质点的位移是2A-,且向y 轴负方向运动,下图是其对应的旋转矢量图,由图可知,其初相位是23π,振动曲线上给出了质点从2A -到A 的时间是1s ,其对应的相位从23π变化到2π,所以它的角速度11224313rad s rad s πππω---=⋅=⋅。
简谐振动的振动方程为422cos()33x t ππ=+4.5质点作简谐振动,已知振动周期为T ,则其振动动能变化的周期是[] (A)T /4(B)T /2 (C)T (D)2T解析:正确答案(B )质点作简谐振动的动能表达式是222k 1sin ()2E m A t ωωϕ=+,可见其变化的周期是简谐振动周期的12。
4.6设某人一条腿的质量为m ,长为l ,当他以一定频率行走时最舒适,试用一种简单的模型估算出该人行走最舒适的频率应为[] (AB(C(D解析:正确答案(D )可以将人行走时腿的摆动当作复摆模型,这样人行走时最舒适的频率应是复摆的简谐振动频率。