【CN109808856A】一种大型船舶外壁清洗机器人【专利】
船舶壁面除锈爬壁机器人的研究

船舶壁面除锈爬壁机器人的研究随着船舶行业的快速发展,船舶维修与保养的重要性日益凸显。
其中,船舶壁面除锈是保证船舶质量和提高使用寿命的关键环节。
然而,传统的手工除锈方法效率低下,对工人健康也有一定危害。
因此,研究一种能够自动、高效、安全地完成船舶壁面除锈的爬壁机器人具有重要意义。
本文将探讨船舶壁面除锈爬壁机器人的研究现状、方法、结果与结论,并展望未来的研究方向。
研究方法:本研究选取了具有代表性的三艘船舶作为样本,分别采用手工除锈、机械臂除锈和爬壁机器人除锈三种方法进行实验。
在实验过程中,我们对各项数据进行了详细收集,包括除锈效率、耗电量、使用成本等,并对不同方法的优缺点进行了技术分析。
研究结果:实验结果表明,爬壁机器人除锈方法具有明显优势。
相较于手工除锈和机械臂除锈,爬壁机器人除锈的效率更高,可大幅缩短除锈时间。
同时,爬壁机器人耗电量较低,能够节约能源,降低使用成本。
爬壁机器人在复杂壁面上的除锈效果也更为出色,可适应各种形状和大小的船舶壁面。
本研究表明,爬壁机器人除锈方法在船舶壁面除锈中具有较高的应用价值。
其高效、安全、节能等优点能够有效解决船舶壁面除锈的难题,提高维修效率,降低维修成本,对推动船舶行业的自动化和智能化发展具有积极作用。
未来,针对爬壁机器人的进一步研究可从以下几个方面展开:1)提高机器人的稳定性和适应性;2)研发更高效的除锈算法和路径规划方法;3)结合机器视觉和人工智能技术,实现除锈质量的自动检测与评估。
船舶除锈是一项重要的维护工作,由于船舶长期处于水环境中,受到水分和海洋生物的影响,船体容易生锈。
为了保持船舶的正常运行和防止腐蚀进一步恶化,除锈工作显得尤为重要。
然而,传统的除锈方法主要依赖人工操作,效率低下,且对工人健康存在一定危害。
因此,研究一种能够自动、高效、安全地进行除锈的机器人的设计和分析具有重要意义。
针对船舶除锈的需求,我们设计了一种履带式船舶除锈爬壁机器人。
该机器人采用模块化设计,包括机械结构、电路设计以及控制系统三个核心部分。
船舶除锈清洗爬壁机器人永磁式履带研究应用
船舶除锈清洗爬壁机器人永磁式履带研究应用船舶除锈清洗是船舶维修中的重要环节,而传统的清洗方法往往耗时耗力,效率低下。
为了提高船舶清洗的效率和安全性,研究出一种永磁式履带机器人来进行船舶除锈清洗工作。
永磁式履带机器人是一种能够在水下自由运动的机器人,它采用强力永磁体作为驱动力,能够在船舶舷壁上自由爬行。
永磁式履带机器人具有以下特点:第一,永磁式履带机器人具有很强的附着力。
机器人的履带上覆盖了大量的永磁体,能够牢牢地附着在船舶舷壁上,并且不易滑脱,保证了机器人在工作时的稳定性和安全性。
第二,永磁式履带机器人具有较高的承重能力。
机器人的履带采用优质的材料制成,具有较强的抗压能力,能够承受较大的重量,可以携带并操作各种清洗工具和设备,满足不同清洗任务的需求。
永磁式履带机器人具有较高的机动性。
机器人采用了先进的控制系统和电动机,能够实现精确的运动控制,能够在船舶舷壁上自由爬行,并且能够适应不同角度和曲面的清洗工作。
永磁式履带机器人除锈清洗船舶的工作原理是通过机器人上的清洗工具,在船舶舷壁上进行清洗作业。
机器人可以搭载各种清洗工具,如刮刀、刷子、高压水枪等,根据具体的清洗任务选择适当的工具进行作业。
机器人可以通过遥控器或者自主导航系统控制,实现对船舶舷壁上不同区域的清洗。
永磁式履带机器人在船舶除锈清洗方面具有广泛的应用前景。
它能够大大提高清洗工作的效率和质量,减少人力资源的浪费。
由于机器人的附着力和机动性较强,能够进行高难度区域的除锈清洗工作,如船舶舷壁的边缘、槽口等。
机器人的使用可以大大提高工作安全性,减少人员的伤亡风险,保护环境。
船舶除锈清洗爬壁机器人永磁式履带在船舶维修中的应用具有重要的意义。
它能够提高清洗工作的效率和质量,减少人力资源的浪费,提高工作安全性。
随着科技的不断发展,相信永磁式履带机器人在船舶维修领域的应用前景将越来越广阔。
一种船体清洁机器人及其清洗方法[发明专利]
![一种船体清洁机器人及其清洗方法[发明专利]](https://img.taocdn.com/s3/m/b078908c783e0912a3162a3c.png)
专利名称:一种船体清洁机器人及其清洗方法专利类型:发明专利
发明人:刘芳华,仲昭杰,任旺
申请号:CN202011366966.9
申请日:20201127
公开号:CN112519977A
公开日:
20210319
专利内容由知识产权出版社提供
摘要:本发明公开了一种船体清洁机器人,包括吸附机构、行走结构、清洁装置、浮体机构、耐压装置、机架,机架为U型框架结构,包括依次连接的侧挡板一、底座和侧挡板二,吸附机构安装于侧挡板一及侧挡板二上,行走结构安装于底座的上表面,清洁装置安装于底座的底面,浮体机构在侧挡板一与侧挡板二之间设置并分别与二者连接,耐压装置设置于浮体机构的中部,浮体机构、底座分别与耐压装置连接。
并提供了其清洗方法。
本发明采用径向吸附与反推力双模式吸附,可以进行吸附力大小的调节,便于机器人在船面上灵活的行走,提高了机器人在不同曲率表面的适应能力。
伸缩转刷与高压水射流喷枪相结合的清洁装置对于船体附着物的清洗也是起到了较好的效果。
申请人:江苏科技大学
地址:212003 江苏省镇江市梦溪路2号
国籍:CN
代理机构:南京经纬专利商标代理有限公司
代理人:徐澍
更多信息请下载全文后查看。
一种自动清洗大型船舶船体的爬壁机器人[发明专利]
![一种自动清洗大型船舶船体的爬壁机器人[发明专利]](https://img.taocdn.com/s3/m/747f91db5a8102d277a22f04.png)
专利名称:一种自动清洗大型船舶船体的爬壁机器人专利类型:发明专利
发明人:张凯,黄裘俊
申请号:CN202010492833.X
申请日:20200603
公开号:CN111731448A
公开日:
20201002
专利内容由知识产权出版社提供
摘要:一种自动清洗大型船舶船体的爬壁机器人,涉及一种爬壁机器人,针对在清洗船体甲板及内部舱体时,施工作业人员需要佩戴安全措施,高空作业的问题,发明了用于清洗船体的爬壁机器人。
该机器人运用仿生学原理,通过永磁铁吸附在船体墙壁上,可以实现对船体墙壁凸起及凹陷处不平表面的越障行走。
机器人身体装备旋转喷头,可以完成对船体各个部位的清洗任务。
该机器人动作原理主要通过气动系统实现,具有机身重量轻,功率小,持续工作时间长,越障能力强等优点。
申请人:沈阳化工大学
地址:110142 辽宁省沈阳市经济技术开发区11号
国籍:CN
代理机构:沈阳技联专利代理有限公司
代理人:张志刚
更多信息请下载全文后查看。
【CN109820450A】一种建筑外墙清洗机器人【专利】
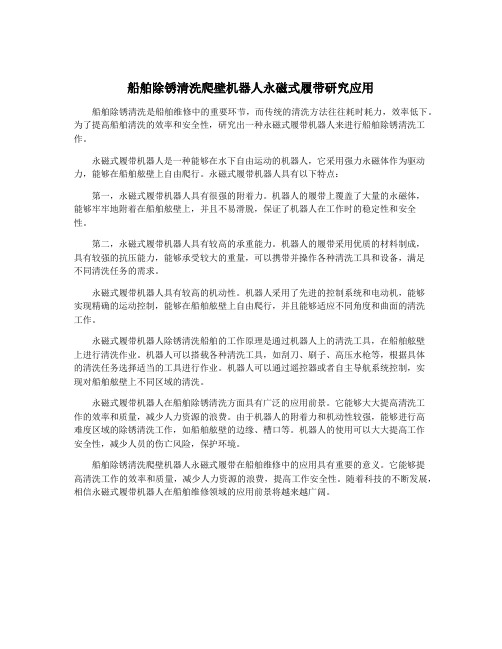
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 201910289416.2(22)申请日 2019.04.11(71)申请人 陈艳艳地址 315000 浙江省宁波市鄞州区宁穿路1678号盛世方舟5楼(72)发明人 张庆宇 (51)Int.Cl.A47L 1/02(2006.01)E04G 23/00(2006.01)(54)发明名称一种建筑外墙清洗机器人(57)摘要本发明公开了一种建筑外墙清洗机器人,包括导轨,所述导轨上设有行走机构,所述行走机构包括移动座,所述移动座内转动连接有动力轮和从动轮;所述移动座内转动连接有侧轮,所述动力轮的一端伸出移动座,所述移动座上安装有第一电机,所述第一电机的输出轴和动力轮的一端之间设有第一传动带;所述移动座上安装有基板,所述基板上设有竖直板,所述竖直板上转动连接有绕线轮,所述基板上安装有第二电机,所述第二电机的输出轴与绕线轮之间设有第二传动带;所述绕线轮上缠绕有钢丝绳,所述钢丝绳的自由端设有外墙清洁机构;该建筑外墙清洗机器人可替代人工完成外墙清洗的高危险任务,操作简单,清洗效率高,可适应不同大小外墙平面的清洗。
权利要求书1页 说明书4页 附图12页CN 109820450 A 2019.05.31C N 109820450A权 利 要 求 书1/1页CN 109820450 A1.一种建筑外墙清洗机器人,包括用于设置在房顶上的导轨,其特征在于,所述导轨上设有沿导轨运动的行走机构,所述行走机构包括架设在导轨上的移动座,所述移动座内在导轨上方转动连接有动力轮和从动轮;所述移动座内在导轨的两侧转动连接有用于防止移动座脱离导轨的侧轮,所述动力轮的一端伸出移动座,所述移动座上安装有第一电机,所述第一电机的输出轴和动力轮的一端之间设有第一传动带;所述移动座上安装有向外墙伸出的基板,所述基板上设有竖直板,所述竖直板上转动连接有绕线轮,所述基板上安装有第二电机,所述第二电机的输出轴与绕线轮之间设有第二传动带;所述绕线轮上缠绕有钢丝绳,所述钢丝绳的自由端设有外墙清洁机构。
一种用于船壳清洗的爬行机器人[实用新型专利]
![一种用于船壳清洗的爬行机器人[实用新型专利]](https://img.taocdn.com/s3/m/540f08ffdb38376baf1ffc4ffe4733687e21fcf2.png)
(19)中华人民共和国国家知识产权局(12)实用新型专利(10)授权公告号 (45)授权公告日 (21)申请号 201620418180.X(22)申请日 2016.05.07(73)专利权人 安徽科技学院地址 230000 安徽省滁州市凤阳县东华路9号(72)发明人 乔印虎 翁新宇 汤永山 徐鹏 (74)专利代理机构 北京科亿知识产权代理事务所(普通合伙) 11350代理人 汤东凤(51)Int.Cl.B63B 59/10(2006.01)B62D 57/024(2006.01)(ESM)同样的发明创造已同日申请发明专利(54)实用新型名称一种用于船壳清洗的爬行机器人(57)摘要本实用新型公开了一种用于船壳清洗的爬行机器人,所述爬行机器人包括本体,驱动爬行机器人移动的移动装置、吸附爬行机器人于船壳的吸附装置以及为移动装置提供动力的驱动装置,其中,所述吸附装置包括设置于本体的若干永磁体,所述吸附装置为永磁式的磁隙式吸附装置;所述移动装置为车轮式移动装置,包括设置于本体两侧的4个车轮;连接所述车轮的主轴;连接所述主轴与驱动装置的齿轮传动机构以及控制爬行机器人运行方向的连杆转向机构;所述本体上还设置有用于搭载预定设备的装置装卸平台。
选择使用合适的吸附装置和移动装置,能够很好的适应船舶行业的使用,方便爬行机器人的移动,可靠性和安全性较高,具有良好的应用前景。
权利要求书1页 说明书11页 附图4页CN 205574233 U 2016.09.14C N 205574233U1.一种用于船壳清洗的爬行机器人,所述爬行机器人包括本体,驱动爬行机器人移动的移动装置、吸附爬行机器人于船壳的吸附装置以及为移动装置提供动力的驱动装置,其特征在于,所述吸附装置包括设置于本体的若干永磁体,所述吸附装置为永磁式的磁隙式吸附装置;所述移动装置为车轮式移动装置,包括设置于本体两侧的4个车轮;连接所述车轮的主轴;连接所述主轴与驱动装置的齿轮传动机构以及控制爬行机器人运行方向的连杆转向机构;所述本体上还设置有用于搭载预定设备的装置装卸平台。
一种船底清洗机器人[发明专利]
![一种船底清洗机器人[发明专利]](https://img.taocdn.com/s3/m/d70d4057793e0912a21614791711cc7931b77809.png)
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 202011419892.0(22)申请日 2020.12.03(71)申请人 河南伯淼水处理有限公司地址 450000 河南省郑州市金水区红旗路25号(72)发明人 董宇新 董伟龙 张亚川 张健 郭铮 李俊安 马胜钢 (74)专利代理机构 郑州裕晟知识产权代理事务所(特殊普通合伙) 41142代理人 徐志威(51)Int.Cl.B63B 59/06(2006.01)B08B 3/02(2006.01)(54)发明名称一种船底清洗机器人(57)摘要本发明公开了一种船底清洗机器人,包括行走机构以及清洗盘,所述行走机构上铰接有举升机构以及用于驱动所述举升机构上下摆动的第一驱动装置,所述举升机构远离行走机构的一端铰接有用于驱动清洗盘来回移动的横移机构,所述横移机构上转动连接有用于安装清洗盘的U型架,所述清洗盘铰接在所述U型架上,所述行走机构上设置有用于控制所述船底清洗机器人运行的控制系统;本发明通过行走机构、举升机构、横移机构、U型架的配合对清洗盘进行多方向的驱动,能够对船底表面进行快速、高效的全方位清洗。
权利要求书1页 说明书6页 附图6页CN 112519976 A 2021.03.19C N 112519976A1.一种船底清洗机器人,包括行走机构以及清洗盘,其特征在于:所述行走机构上铰接有举升机构以及用于驱动所述举升机构上下摆动的第一驱动装置,所述举升机构远离行走机构的一端铰接有用于驱动清洗盘来回移动的横移机构,所述横移机构上转动连接有用于安装清洗盘的U型架,所述清洗盘铰接在所述U型架上,所述行走机构上设置有用于控制所述船底清洗机器人运行的控制系统。
2.根据权利要求1所述的船底清洗机器人,其特征在于:所述举升机构包括铰接在行走机构上的两个上下平行设置的桁架,两个所述桁架的另一端铰接在用于安装清洗盘的横移机构上,所述第一驱动装置的两端分别铰接在行走机构及位于下侧的桁架上,两个所述桁架与行走机构以及横移机构的四个铰接点连接线始终呈平行四边形结构。
一种船舶壁面除锈爬壁机器人及其工作方法[发明专利]
![一种船舶壁面除锈爬壁机器人及其工作方法[发明专利]](https://img.taocdn.com/s3/m/c7e102636529647d262852d1.png)
专利名称:一种船舶壁面除锈爬壁机器人及其工作方法专利类型:发明专利
发明人:弓永军,王祖温,衣正尧,王兴如,张增猛
申请号:CN200910219658.0
申请日:20091103
公开号:CN101704241A
公开日:
20100512
专利内容由知识产权出版社提供
摘要:本发明公开了一种船舶壁面除锈爬壁机器人及其工作方法,所述的机器人包括框架、链条履带行走机构、永磁吸附单元、左上驱动电机、左上减速机、右下驱动电机、右下减速机,所述的链条履带行走机构由左右两条链条履带组成,所述的永磁吸附单元安装在链条履带行走机构上,超高压水射流真空除锈清洗器外接真空源和永磁吸附单元形成真空永磁混合吸附。
所述的方法包括调整链条的张紧度、调节高度和运动控制的步骤。
由于本发明采用永磁真空混合吸附方式设计爬壁机器人,有效利用回收锈渣真空的负压压力,并且结合永磁吸附力,使机器人吸附可靠、工作安全、吸附结构紧凑,可以实现爬壁机器人高空大负载作业。
申请人:大连海事大学
地址:116026 辽宁省大连市甘井子区凌海路1号大连海事大学交通与物流工程学院
国籍:CN
代理机构:大连东方专利代理有限责任公司
代理人:李洪福
更多信息请下载全文后查看。
一种用于维持大型舰船船体外板清洁的仿生软体机器人[发明专利]
![一种用于维持大型舰船船体外板清洁的仿生软体机器人[发明专利]](https://img.taocdn.com/s3/m/5a710bc96394dd88d0d233d4b14e852458fb3995.png)
专利名称:一种用于维持大型舰船船体外板清洁的仿生软体机器人
专利类型:发明专利
发明人:韩泽旭,张融,江雷
申请号:CN202210242487.9
申请日:20220311
公开号:CN114604387A
公开日:
20220610
专利内容由知识产权出版社提供
摘要:本发明提供一种用于维持大型舰船船体外板清洁的仿生软体机器人,包括核心舱,以悬臂结构安装在核心舱侧面的软体臂,连接在软体臂下侧的刮扫足阵列,安装在核心舱底部的行动装置,设置在核心舱内部的控制器和电源。
本发明在软体臂形变与足上柔性结构补偿形变的双重自适应作用下,可以很好适应舰船外板的复杂曲面形状;刮扫足阵列中的刮扫足彼此独立,在各个刮扫足中均有足内永磁体直接为刮扫块提供所需的吸附力,使吸附力作用面积大,吸附柔和;由于行动装置无需为软体臂和刮扫足阵列提供吸附力,行走装置可以精简灵活,从而使仿生软体机器人行动灵活;通过同时增加软体臂的长度和刮扫足的数量,在保证吸附稳定的前提下,实现更大的清洁范围。
申请人:北京仿生界面科学未来技术研究院
地址:100094 北京市海淀区永丰基地丰德中路13号贝伦产业园5号楼
国籍:CN
代理机构:北京巨弘知识产权代理事务所(普通合伙)
代理人:赵洋
更多信息请下载全文后查看。
船舶除锈清洗爬壁机器人永磁式履带研究应用
船舶除锈清洗爬壁机器人永磁式履带研究应用船舶除锈清洗一直是船舶维护中非常重要的一环,保持船舶表面的清洁和无锈蚀是保证船舶安全和延长船舶使用寿命的关键。
传统的船舶除锈清洗工作需要大量人力和时间,并且存在安全隐患。
为了解决这一问题,近年来,船舶除锈清洗爬壁机器人的研发成为了一个热点。
本文将重点介绍船舶除锈清洗爬壁机器人中的永磁式履带技术及其在船舶除锈清洗中的应用。
一、船舶除锈清洗爬壁机器人船舶除锈清洗爬壁机器人是一种能够在船舶表面自由移动并进行除锈清洗的机器人装置。
相较于传统的人工除锈清洗方式,船舶除锈清洗爬壁机器人具有如下优势:1. 高效:机器人能够在船舶表面自由移动,不受限于人力移动的局限,从而大大提高了除锈清洗效率。
2. 安全:机器人能够代替人工进入狭窄和高危险区域进行除锈清洗,减少了人员伤亡的风险。
3. 节能环保:机器人采用电力供能,减少了对传统燃油能源的依赖,减少了对环境的污染。
4. 数据采集:机器人可以搭载传感器和摄像头,实时采集船舶表面的数据,为船舶维护提供数据支持。
二、永磁式履带技术永磁式履带技术是船舶除锈清洗爬壁机器人中关键的移动技术。
与传统的金属履带相比,永磁式履带具有以下优势:1. 轻巧:永磁材料具有较小的密度,能够在保证强度的情况下实现轻量化设计。
2. 高承载:永磁材料具有较高的磁性,能够实现较高的承载能力,适合用于船舶表面不平整的环境。
3. 省能:永磁材料在无外界磁场的情况下能够保持磁性,不需要额外的能源供给。
4. 静音:永磁式履带在运动过程中不产生摩擦噪音,保持机器人的工作环境安静。
三、永磁式履带在船舶除锈清洗中的应用1. 自由移动:永磁式履带技术能够使机器人在船舶表面自由移动,能够适应不同斜度和曲率的船舶表面,实现全面覆盖的除锈清洗。
2. 精确控制:永磁式履带能够实现对机器人的精确控制,能够在船舶表面进行高效而精准的除锈清洗作业。
3. 数据采集:永磁式履带技术能够实现对船舶表面数据的实时采集,为船舶维护提供数据支持,有助于发现和预防船舶表面的腐蚀和锈蚀问题。
船舶除锈清洗爬壁机器人永磁式履带研究应用
船舶除锈清洗爬壁机器人永磁式履带研究应用近年来,船舶除锈清洗工作一直是一个重要且艰巨的任务。
传统的方法包括人工刷洗和高压水清洗,这需要大量的人力和时间,并且效果不好。
近期,研究人员提出了一种新型的永磁式履带机器人,用于船舶除锈清洗,取得了一定的研究应用。
该永磁式履带机器人具有高效的除锈清洗能力。
不同于传统的方法,该机器人采用机器人技术和永磁式履带技术相结合,能够在船体表面上自由运动。
机器人的主体部分由除锈清洗系统和永磁式履带系统组成。
除锈清洗系统包括高压水喷射装置和除锈剂喷射装置,能够将高压水和除锈剂均匀地喷射到船体表面,有效地去除锈蚀物与附着的污物。
永磁式履带系统通过控制永磁铁的磁场变化,能够牢固地吸附在船体表面并自由运动,极大地增加了机器人在船体表面的粘附力和运动灵活性。
在实验中,研究人员使用该永磁式履带机器人进行了船舶除锈清洗工作。
实验结果显示,机器人能够轻松地在船体表面自由运动,快速而有效地去除锈蚀物和污物。
与传统的方法相比,该机器人具有许多优势。
它能够高效地完成工作,减少人力和时间成本。
机器人能够在船体表面均匀地喷洒高压水和除锈剂,保证了清洗效果的一致性和质量。
永磁式履带系统能够牢固地吸附在船体表面,避免了在清洗过程中跌落的风险。
尽管该永磁式履带机器人在船舶除锈清洗中显示出了很大的潜力,但仍存在一些问题需要进一步研究和解决。
机器人的清洗能力还需要进一步提升,以适应不同程度的锈蚀和污染。
机器人的操作和控制系统需要更加智能化和精确,以确保机器人在船体表面的稳定运动。
机器人的适用范围和应用领域还需要进一步拓展和深入研究,以满足不同类型和大小的船舶的除锈清洗需求。
船舶除锈清洗爬壁机器人的研究应用具有很大的潜力和重要意义。
该机器人能够高效地完成船舶除锈清洗工作,并且具有许多优势。
还需要进一步研究和改进,以提高机器人的清洗能力和操作性能,从而更好地满足船舶除锈清洗的需求。
船舶除锈清洗爬壁机器人永磁式履带研究应用
船舶除锈清洗爬壁机器人永磁式履带研究应用船舶除锈清洗爬壁机器人是一种利用永磁式履带进行移动的机器人,其主要应用是在船舶上进行除锈和清洗工作。
本文将对永磁式履带的研究和应用进行论述,并探讨船舶除锈清洗爬壁机器人在实际工作中的应用价值。
永磁式履带是一种新型的移动装置,它采用了永磁材料制成的履带,可以在船舶的壁面上自由行走。
相比传统的机械轮轨道结构,永磁式履带具有更好的适应性和灵活性。
永磁材料具有良好的磁性能,可以保持较长时间的磁力,使得永磁式履带在船舶壁面上移动时更加稳定和精准。
船舶除锈清洗爬壁机器人主要由底盘、机器人臂和清洗工具组成。
底盘是机器人的移动装置,由永磁式履带构成。
机器人臂用于携带清洗工具,并可以根据需要进行伸缩和旋转。
清洗工具通常是喷洒水或喷射高压水流,以清除船舶表面的污垢和锈蚀物。
船舶除锈清洗爬壁机器人的应用主要有以下几个方面:船舶除锈清洗是船舶维护保养中非常重要的环节。
船舶在长时间航行过程中,壁面容易积聚污垢和锈蚀物,这会影响船舶的航行性能和使用寿命。
传统的除锈和清洗工作需要人工进行,工作量大、效率低,且操作环境恶劣。
而船舶除锈清洗爬壁机器人可以在船舶壁面上自动行走,并通过清洗工具将船舶表面的污垢和锈蚀物清除,大大提高了工作效率和安全性。
船舶除锈清洗爬壁机器人适用于各种类型和尺寸的船舶。
不同尺寸和形状的船舶需要进行不同程度的除锈和清洗工作,传统的人工方式难以适应这种需求。
而船舶除锈清洗爬壁机器人可以根据船舶的尺寸和形状进行调整和适配,达到更好的清洗效果。
船舶除锈清洗爬壁机器人具有很好的环保效益。
传统的除锈和清洗工作通常使用化学药剂或高压水流,这会对环境造成一定的污染。
而船舶除锈清洗爬壁机器人采用的是高效清洗工具,可以在减少化学药剂使用的减少对水资源的浪费。
船舶除锈清洗爬壁机器人的永磁式履带研究与应用具有重要的意义。
它可以大幅提高船舶除锈清洗工作的效率和安全性,适应不同尺寸和形状的船舶,并具有较好的环保效益。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(19)中华人民共和国国家知识产权局
(12)发明专利申请
(10)申请公布号 (43)申请公布日 (21)申请号 201910191885.0
(22)申请日 2019.03.14
(71)申请人 蔡良云
地址 426100 湖南省永州市祁阳县进宝塘
镇农民村1组
(72)发明人 蔡良云
(51)Int.Cl.
B63B 59/10(2006.01)
B62D 57/02(2006.01)
(54)发明名称一种大型船舶外壁清洗机器人(57)摘要本发明提供一种大型船舶外壁清洗机器人,包括:支撑架、驱动轴、从动轴、驱动齿轮、从动齿轮、连杆机构、底板、吸尘箱、驱动电机、旋转刷;驱动轴与所述支撑架转动连接;从动轴与所述支撑架转动连接;伺服电机固定安装在电机固定板上,用于提供动力;驱动齿轮固定安装在所述伺服电机的电机轴上;从动齿轮固定安装在驱动轴上,并与驱动齿轮啮合;连杆机构与所述驱动轴和所述从动轴连接;本发明通过设置四个连杆机构,控制机器在外壁的前进、后退等运动功能,通过设置吸盘来将整个机器稳定在轮船外壁上,吸尘箱和旋转刷的相互配合工作,保证机器在清洁工作的过程中,可以实现粉尘回收,
保护环境。
权利要求书1页 说明书3页 附图2页CN 109808856 A 2019.05.28
C N 109808856
A
权 利 要 求 书1/1页CN 109808856 A
1.一种大型船舶外壁清洗机器人,其特征在于,包括:
支撑架(5);
驱动轴(4),与所述支撑架(5)转动连接;
从动轴,与所述支撑架(5)转动连接;
伺服电机(1),固定安装在所述电机固定板上,用于提供动力;
驱动齿轮(2),固定安装在所述伺服电机(1)的电机轴上;
从动齿轮(3),固定安装在所述驱动轴(4)上,并与所述驱动齿轮(2)啮合;
连杆机构(7),与所述驱动轴(4)和所述从动轴连接;
底板(8),通过所述固定圈(6)固定于所述支承架(5)上;所述电机固定板固定安装在所述底板(8)上;
吸尘箱(11),固定安装在所述底板(8)前端面;
驱动电机(10),固定安装在所述吸尘箱(11)、前端面;及
旋转刷(9),与所述驱动电机(10)的电机轴固定连接。
2.根据权利要求1所述的一种大型船舶外壁清洗机器人,其特征在于,所述的连杆机构(7)包括:
底架(706);
驱动连杆(701),其上端与所述驱动轴(4)上的曲柄转动连接,其下端与所述底架(706)转动连接;
第四从动连杆(705),其下端与所述底架(706)转动连接;
第一从动连杆(702),其上端与所述从动轴转动连接,其下端与所述驱动连杆(701)上的转轴转动连接;
第二从动连杆(703),其上端与所述驱动轴(4)转动连接,其下端与所述第四从动连杆(705)上的转轴转动连接;
第三从动连杆(704),其左端与所述驱动连杆(701)上的转轴转动连接,其右端与所述第四从动连杆(705)上转轴转动连接;及
吸盘(707),固定安装在所述底架(70)下端面。
3.根据权利要求1所述的一种大型船舶外壁清洗机器人,其特征在于:所述的吸尘箱(11)为圆柱结构,其内部安装有电机和扇叶,扇叶与驱动电机固定连接;在吸尘箱(11)底部开有多个圆形小孔。
2。