高压线机械除冰车的设计 毕业设计(论文)
一种高压线除冰机器人的设计
一种高压线除冰机器人的设计设计了一款基于STC89C52单片机的高压线除冰机器人。
该机器人可通过蓝牙通讯、短信通信和自我检测完成在高压线上的行走、除冰和数据实时监测等功能。
通过实验室测试和调整,较好地实现了预期功能。
标签:机械除冰;光强检测;高压线路Abstract:A high-voltage deicing robot based on STC89C52 microcontroller is designed. The robot can perform the functions of walking,deicing and data real-time monitoring on high-voltage lines through Bluetooth communication,short message communication and self-detection. Through the laboratory test and adjustment,the expected function is well realized.Keywords:mechanical deicing;light intensity detection;high voltage line改革开放以来,我国的电力行业得到迅速发展,电网覆盖面积扩大,线路走廊穿越的地理环境更加复杂,输电线路冰灾事故更为频发。
严重的输电线路覆冰会导致杆塔倾斜、倒塌、断线,绝缘子闪络,而且线路不均匀覆冰和不同期脱冰还会引起导线舞动现象,这些情况会引发线路跳闸、供电中断等事故,给工农业生产和人民生活造成严重影响。
目前,国内外除冰方法有30余种,根据除冰机理可分为机械除冰法与热力融冰法两类。
机械除冰方法能耗较小,但是除冰效率低,而且一般需要人工参与;热力融冰较机械除冰速度快,安全性高,但实际应用中限制因素太多,不能广泛适用。
对于较为严重的导线覆冰一般以人工上线除冰最为有效,但人工除冰危险性很高且效率较低。
高压电线除冰机器人
高压电线除冰机器人
作者:刘哲成
来源:《发明与创新·中学生》2016年第02期
高压电线结冰后需要抢修与维护时,由于工作条件恶劣,人工作业存在难度大、危险性高、费用高的弊端。
本文在机械手工作原理的基础上,提出了一种高压电线除冰机器人的设计构想。
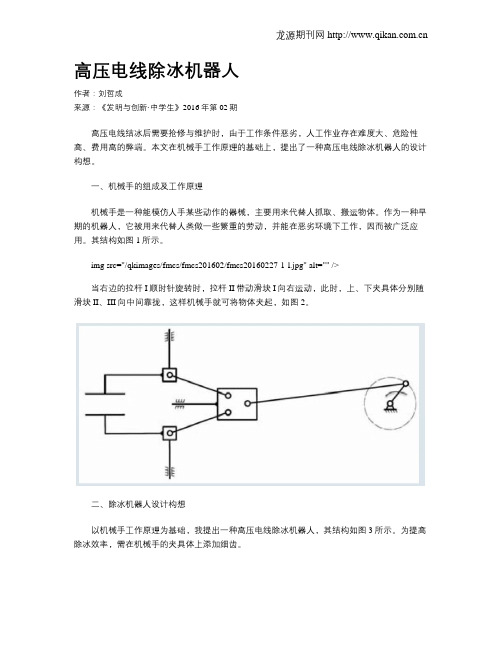
一、机械手的组成及工作原理
机械手是一种能模仿人手某些动作的器械,主要用来代替人抓取、搬运物体。
作为一种早期的机器人,它被用来代替人类做一些繁重的劳动,并能在恶劣环境下工作,因而被广泛应用。
其结构如图1所示。
img src="/qkimages/fmcs/fmcs201602/fmcs20160227-1-l.jpg" alt="" />
当右边的拉杆I顺时针旋转时,拉杆II带动滑块I向右运动,此时,上、下夹具体分别随滑块II、III向中间靠拢,这样机械手就可将物体夹起,如图2。
二、除冰机器人设计构想
以机械手工作原理为基础,我提出一种高压电线除冰机器人,其结构如图3所示。
为提高除冰效率,需在机械手的夹具体上添加细齿。
高压电线除冰机器人在线轮的转动下沿电线前进,当拉杆I顺时针转动时,通过拉杆II、滑块I、II、III的传递,机械手的夹具体将高压电线夹住,从而将高压电线上的冰块除掉,如
图4。
高压输电线路除冰机器人的机构设计
第30卷 第6期2008年12月三峡大学学报(自然科学版)J of China Three G orges Univ.(Natural Sciences )Vol 130No.6Dec 12008收稿日期:2008208223通讯作者:张 屹(1976-),男,副教授,博士后,主要研究方向为机电系统现代设计方法.高压输电线路除冰机器人的机构设计张 屹 邵 威 高虹亮 罗 成 杨 旸(三峡大学机械与材料学院,湖北宜昌 443002)摘要:在分析高压输电线路巡检工作的特点和国内外高压输电线路巡线机器人的发展现状和发展趋势的基础上,结合高压输电线路上覆冰的去除方法,主要介绍了设计的一种新型的高压输电线路除冰机器人.该机器人结构简单,可以在输电线上稳定地行走,能够较好地解决自主越障的问题,完成输电线上的除冰任务,具有广泛的应用前景.关键词:除冰机器人; 输电线路; 越障; 除冰中图分类号:T H112 文献标识码:A 文章编号:16722948X (2008)0620069204Mechanical Design of a Robot for Deicing T ransmission LinesZhang Y i Shao Wei Gao Hongliang L uo Cheng Yang Yang(College of Mechanical &Material Engineering ,China Three G orges U niv.,Y ichang 443002,China )Abstract A new robot for t ransmission lines deicing is designed ,based on analyzing t he characters of trans 2mission lines inspection and t he advance of t he robot for inspection of t ransmission lines at home and abroad ;and deicing combining t he met hods of t ransmission lines.The frame of t his robot is very simple.It can walk on t he t ransmission lines ,and solve t he p roblem of spanning t he barrier it self better ,and complete t he deicing task basically.The robot has a broad p rospect of application.K eyw ords deicing robot ; t ransmission lines ; spanning t he barriers ; deicing 随着我国经济的高速发展,超高压大容量输电线路越建越多,线路走廊穿越的地理环境更加复杂,如经过大面积的水库、湖泊和崇山峻岭,给线路维护带来很多困难.而且在严冬及初春季节,我国云贵高原、川陕一带及两湖地区常出现雾凇和雨凇现象,造成架空输电线路覆冰,使线路舞动、闪络、烧伤,甚至断线倒杆,使电网结构遭到破坏,安全运行受到严重威胁.在紧急情况下,寻道员用带电操作杆或其它类似的绝缘棒只能为很少的一部分覆冰线路除冰,人工除冰有很高的危险性[1].在国外,一些国家的地理与气候情况与我国相似,甚至一些国家的情况更加恶劣,为了保证电力系统的可靠性,提高高压输电线除冰的效率,减少损失,维护工人的安全,开发一种可以替代或部分替代工人进行除冰作业的新型设备一直是国内外相关研究的热点.因此,研制安全有效的除冰机械以代替人进行导线除冰具有较好的应用前景和实用意义.文章提出的除冰机器人即为一种既安全又有效的除冰装置.1 高压输电线路除冰机器人的机构介绍机器人是一个复杂的机电一体化系统,涉及到机械结构、自动控制、通信、传感器信息融合、电源技术等多个领域.但机械结构是整个系统的基础,也是目前制约机器人实用化的最大障碍.针对这种情况设计了一种新型的实用的高压输电线路除冰机器人,它具有以下一些功能:(1)能在输电线上以预想的速度进行平稳爬行;(2)具有一定的爬坡能力;(3)能够跨越输电线上的防震锤,线夹,绝缘子等障碍物;(4)能够除去输电线上的冰雪.机器人的参数如下:机器人的体积为600mm ×328mm ×526mm (长×宽×高);重量约为15kg ;平稳爬行的速度约为375m/h.机器人的机械结构主要包括平稳爬行机构、越障机构和除冰机构,其总体图如图1所示.图1 机器人的总体图1.1 平稳爬行机构的设计为了使机器人的前行速度达到最快,且前行平稳,此机器人采用行走轮式机构,如图1中的平稳爬行机构.1.2 越障机构的设计机器人的越障机构主要由行走箱机构、升降箱机构、夹紧机构和旋转机构组成.(1)行走箱机构.机器人行走箱机构行走方式的构思来自蠕虫的行走方式.其主要由左、右行走箱机构以及行走螺杆和螺母组成,如图2所示.图2 行走箱机构(2)升降箱机构[2].机器人的升降方式也采用螺杆驱动机构升降的方式.升降箱机构的主要组成为上箱机构和下箱机构以及升降螺杆和螺母组成,如图3所示.(3)夹紧机构[3].夹紧机构的夹紧夹图如图4所示,1为滑槽,升降机构上箱上的伸出轴便在其中滑动,2为轴孔,升降箱下箱机构的伸出轴便从中穿入,而轴便带动夹紧夹在升降箱上箱机构的槽中上下滑动,从而带动夹紧夹顺、逆时针旋转,3为半圆形槽,当夹紧夹到达死点位置时,便夹紧导线.夹紧夹的作用是夹紧导线,其运动方式的简图如图6和图7所示.夹紧夹的松开状态如图5所示,夹紧夹的夹紧状态如图6所示.夹紧夹将导线夹紧,便可保证机器人在越障时不会发生径向和轴向侧翻.(4)旋转机构.旋转机构采用的是一对齿轮的传动,齿轮安装在行走箱机构的行走箱内,如图7所示.1为大齿轮,以键连接的方式与2相连,2为箱座与升降机构的连接,它的作用是将升降机构和箱座连接,3为小齿轮,它靠驱动电机4驱动,4为小齿轮的驱动电机,5为螺母,6为插销,5和6的作用是托住行走箱.当小齿轮旋转时,带动大齿轮的旋转,而大齿轮则通过2带动升降箱机构与除冰机构的旋转.1.3 除冰机构的设计目前国内外已经研究出许多种除冰的方法[4],但是有许多在目前都只是提出,并没有实现.所设计的高压输电线路除冰机器人是在对巡线机器人作设计的基础上添加除冰装置,既可以巡线也可以除冰,结构比较简单,而且效率比较高.所设计的除冰机构分为两个部分,即铣刀部分与楔形块部分.先利用铣刀1从覆冰的中间铣出一条裂缝,覆冰的其它部分便会裂开,其后的楔形块4再对覆冰进行挤压,覆冰便会07三峡大学学报(自然科学版) 2008年12月被挤压掉,导线的除冰便完成.如图8所示.1.铣刀;2.联轴器;3.电机;4.楔形块;5.螺纹孔图8 除冰机构机器人跨越悬垂绝缘子等障碍物时一只手臂悬空,另一只手臂越过绝缘子,而此时障碍物另一侧导线上的覆冰未清除,轮子和铣刀处于一个平面上面,这样就会造成轮子无法在电线上落脚的情况.基于这种情况的考虑,提出了第2套除冰方案.具体示意图如图9所示,采用2个铣刀,其中铣刀中心线和导线中心线垂直,在无障碍物时和上面的除冰装置类似,铣刀电机驱动铣刀旋转除导线两侧面的覆冰,后面的楔形块在机器向前行走的推力作用下可以破碎铣刀未清除的覆冰.当遇到悬垂线夹这样的障碍物时,首先还是行走电机停机,然后启动驱动螺杆运动的电机,使电极正转,在螺杆转动下带动与螺母相连的楔形块以及前面的铣刀一起向前推进,直到将通过悬垂线夹并且将线夹前面的覆冰除掉,直到当一只手臂越障后轮子可以落到导线上面为止.当除完该段覆冰后,螺杆电机反转将刚前进的装置收回,然后再进行如上述的越障动作.图9 第2套方案除冰机构2 高压输电线路除冰机器人的运动过程此机器人采用双臂结构,这样可以满足其在行走时的稳定性,并且在双臂的配合下可以完成相应的姿态调整以完成各种障碍的跨越和除冰[5].机器人的整体机构的三维图如图10所示,由于此机器人的驱动靠的是电机的驱动,因此叙述其运动过程将以电机为线路对整体机构的运动过程作阐述.图10 整体图为了使运动过程分析起来简单,下面将采用机器人的结构简图作分析,机器人的结构简图如图11所示.由于两边机构基本对称,故下面简图只对一边作了运动方式的标注.1.行走箱螺杆驱动电机;2.行走箱螺杆;3、14.旋转机构;4、11.升降箱机构;5、12.夹紧夹;6、11.除冰机构;7、10.螺杆;8、9.行走轮.图11 整体图的简化图而若要完成基本的行走运动、相应的障碍跨越和除冰,那么机器人将要有以下基本的运动形式来互相配合完成基本的行走运动、相应的障碍跨越和除冰.(1)行走运动.双臂依靠8和9前后行走轮,可以在输电上行走,来完成除冰的任务.(2)旋转运动.升降箱机构和除冰机构的整体旋转可以依靠3和14各自的齿轮组旋转来完成.在此机器人中,只需要旋转180°即可.(3)升降运动.机器人的升降可以依靠4和13中各自的螺杆和螺母的相对运动来完成.(4)夹紧运动.夹紧运动不需要电机的驱动来完成,上面已介绍过当4和13升降机构进行升降运动时会带动夹紧夹夹紧或松开输电线.(5)移行运动.当除冰机构采用的是图9的除冰机构时,铣刀的伸出与缩回运动需要依靠7和10的螺杆与螺母的相对运动来完成.由于在输电线上存在多种障碍物,故只对其中一种典型的障碍物防震锤作跨越演示,具体步骤如下.第1步:当前臂接近防震锤时,电机1,2停止,行走轮8和9停止前进,电机5和6打开,前后臂的升17第30卷 第6期 张 屹等 高压输电线路除冰机器人的机构设计降螺杆顺时针旋转,带动升降箱下箱和行走箱一起上升,夹紧夹5顺时针旋转和夹紧夹12逆时针旋转,当俩夹紧夹夹紧输电线时,电机5和6关闭.采用第2套除冰机构,打开除冰机构的驱动电机,通过冰刀在伸出和缩回的过程中,将防震锤后方输电线上的一段冰除去,以便前臂的行走轮8安放.如图12所示.第2步:前臂的电机5打开,前臂的升降螺杆顺时针旋转,由于后臂的夹紧夹12已将输电线夹紧,前臂中固定在上箱中的螺母向上运动,螺母带动上箱和除冰机构、行走轮向上运动,此时夹紧夹5顺时针旋转,当夹紧夹夹紧输电线时,此时将电机5关闭.打开前臂旋转机构的小齿轮驱动电机7,小齿轮带动大齿轮旋转,当大齿轮逆时针旋转180°后,关闭电机7.打开行走箱行走螺杆的驱动电机9,由于后臂的夹紧夹12将输电线夹紧,故前臂便在行走螺杆和螺母的相对移动下前进,当移动到防震锤后方的不远处,关闭电机9.如图13所示.第3步:打开前臂旋转机构小齿轮驱动电机7,小齿轮带动大齿轮旋转,当大齿轮顺时针旋转180°后,关闭电机7.前臂的电机5打开,前臂的升降螺杆逆时针旋转,升降箱和除冰机构下降,当夹紧夹5将输电线夹紧时,关闭电机5,此时前臂便跃过防震锤.如图14所示.图14 前臂完全落在防震锤另一侧输电线上 第4步:后臂如同前臂过防震锤一样跨越,机器人便恢复到跨越防震锤前的情况.如图15所示.图15 双臂都越过防震锤3 结 论以上所述为高压输电线路除冰机器人机械部分的设计,该机器人为在高压线上自动智能化的作业提供了一个良好的平台,同时该机器人在未结冰季节可以将前面的除冰装置卸掉而换为巡线装置,这样就变成了巡线机器人,达到一机多用的目的.该机器人采用两手臂轮式行走结构,使结构上更为简便,控制上更容易实现,巧妙的线夹装置和仿尺蠖越障行走的方式使得该机器人的的可靠性更高.通过仿真实验表明,该机器人可以在线路上稳定的除冰,同时完全解决了直线段的自主越障问题,变路径自主越障还需要人工辅助,基本上能够较好地完成规定的除冰任务.参考文献:[1] 张运楚,梁自泽,谭 民.架空电力线路巡线机器人的研究综述[J ].机器人,2004,26(5):4672473.[2] 吴俊飞,王新智,姜生元,等.高压线检测机器人吊臂式越障机构的研制[J ].机器人技术,2006(11):35236.[3] 朱兴龙,王洪光,房立金,等.一种自主越障巡检机器人行走夹持机构[J ].机械设计,2006,23(8):11213.[4] 苑吉河,蒋兴良,易 辉,等.输电线路导线覆冰的国内外研究现状[J ].高电压技术,2004,30(1):629.[5] 耿 欣,周延泽.巡线机器人的爬行方案设计[J ].机器人技术与应用,2002(4):19221.[责任编辑 张 莉]27三峡大学学报(自然科学版) 2008年12月。
(最新版)机械类毕业论文范文40382814
高压线机械除冰车的设计Design of Mechanical De-icing Vehicle For High-Voltage Lines摘要近年来我国南方部分地区频繁发生雨雪冰冻灾害导致输电线表面结冰、重力增大高压输电线路大面积受损为了避免高压线被压坏保证电力输送的正常进行就需要将高压线覆冰及时消除在通过分析现有除冰技术各种利弊后提出本文的机械除冰车方案本文的目的是设计并制造一种新型的高压线机械除冰车论文首先提出了除冰车的整体方案设计及所需解决的主要问题包括悬挂问题、传动及驱动方式、除冰刀、行走轮和驱动轮的设计然后进行了包括轴和除冰刀的设计计算、锁紧机构和调节机构设计的机械部分设计计算以及控制部分的设计并给出了轴和除冰刀的加工工艺论文最后总结了本设计的创新点及特点并展示了部分实物及试验照片本文设计的高压线除冰车不仅除冰方式独特、除冰效率高而且其自动调节的结构可以减少除冰车在除冰时对高压线的损伤其体积小方便人工携带操作简单具有广阔的应用前景关键词:高压线机械除冰车机械设计控制设计AbstractIn recent yearssnow and ice storms occur frequently in parts of southern China. transmission lines were covered by另外要保证锁紧轮耐磨选择超耐磨材料3.4.3 锁紧轴系的估算图3-7 锁紧轴零件图(1)锁紧轴最小直径的估算由上述后轮轴的估算校核后得到而锁紧轮轴的转速是由后轮轴传递过来的所以锁紧轮的转速则选取轴的材料为45钢调质处理查阅《机械设计第八版》表15-3取得:最小直径是用来安装轴承为满足链轮的轴向固定采用轴肩定位(定位轴肩的高度一般取为)圆整取(2)轴承的选择因轴承同时承受径向载荷和轴向载荷的作用故选用角接触球轴承按照工作要求安装轴承处的直径即可选取0基本游隙组、标准精度级角接触球轴承其尺寸故取右端角接触球轴承采用轴肩定位故:安装车轮处左端采用轴用弹性挡圈定位当轴径时选用的轴用弹性挡圈直径为而安装轴用弹性挡圈处轴径安装锁紧轮的考虑到直径为的高压电缆需要从除冰车的两侧板间穿过而且轮子凹槽与高压线接触较好定右端用轴肩定位最右端安装轴承处(3)轴上零件的轴向定位锁紧轮与轴间的轴向定位采用平键连接按查表得平键截面键槽用键槽铣刀加工长为为了保证车轮与轴配合有良好的对中性故选用车轮轮觳和轴的配合为链轮与轴间的轴向定位用螺母固定充分利用两者间的摩擦力(4)轴的校核截面2、A、3、4、B、5、6、7只受扭矩作用虽然键槽、轴肩、过渡配合所引起的应力集中均将消弱轴的疲劳强度但由于轴的最小直径是按扭转弯曲疲劳强度较为宽裕确定的所以上述截面均无需校核从应力集中对轴的疲劳强度的影响来看截面89处过盈配合引起的应力集中最严重且形式相近但其截面均不受扭矩同时轴径很大故不必校核从受载的情况看截面C上的应力虽然最大但是应立集中不大且这里轴的直径相当大故截面C也不用校核经多次试验亦合格3.5 调节机构3.5.1 方案比较方案I:手动调节如图3-8所示其优点是调节方便结构简单不会明显增大除冰车的质量在除冰刀的支撑板上可以通过调节丝杆来调节除冰刀的相对位置从而实现除冰刀位置的确定但由于悬挂在两塔之间的高压线是有一定绕度的且各个点的绕度不一样所以当绕度改变时除冰刀与高压线的初始相对位置就会发生改变当其位置改变且小于初始的相对位置时除冰刀在除冰的过程中很可能会损害高压线图3-8 除冰刀调节结构方案I方案II:电动推杆调节如图3-9、3-10所示通过两个支撑座把12V的电动推杆固定在悬臂板和电机支撑板上通过远程控制模块通过遥控手柄控制电动推杆伸出量从而实现高压线和除冰刀相对位置的确定但其控制和结构相对手动调节复杂图3-9 调节机构方案II(原始状态)图3-10 调节机构方案II(极限状态)分析后选择方案I与II相结合因为这样除冰车具有以下几个优点:(1)可以随时调节除冰刀与高压线的相对位置避免在除冰的过程中对高压线的损害;(2)不会使得除冰车的整体质量明显增大而影响除冰车的电机的选择;(3)两种调整机构的结合可以尽可能保证由高压线的绕度来确定除冰刀调整的极限位置使得除冰刀在调整的时候更加方便和准确;(4)除冰刀附近装有摄像头使操作者可在室内控制除冰车随时观察除冰动态及电线破损情况从而通过遥控手柄调节电动推杆的伸出量此外在除冰车的上部还装有夜视灯可以在夜间和雾霾天气下作业3.5.2 调节结构的工作原理根据高压线的绕度计算确定其最大的极限位置电动推杆的举力均为15KG满足强度要求其绕铰链的旋转量大约为10°左右电动推杆的电路图如图3-11所示图3-11 电动推杆的电路图结论本次毕业设计期间作者通过现有除冰技术的分析和比较提出了一种新的机械除冰方案并将其加工制造成实物该除冰车采用两侧对称结构下方悬挂较重的蓄电池和电动机解决了除冰车正在高压线上的悬挂问题采用两个的蓄电池为两个直流电机和两个电动推杆提供电能并通过链转动来驱动除冰车的行走及除冰刀的转动并通过无线遥控方式控制除冰车的工作过程同时除冰车还设有锁紧机构和调节结构保证除冰车运行时能够与高压线紧密贴合并随时调整与高压线的相对位置更好的完成除冰任务另外由于考虑到高压线上的磁场可能对无线遥控系统造成一定程度的影响所以本设计还采用简单的继电器和限位开关来控制电机的工作在设计方案完善后作者将附录中所有工程图中零件实际加工出来并完成了装配制造出来的除冰车在冰库中进行了模拟除冰基本达到了预期效果毕业设计主要收获和体会如下:第一学到了产品设计的方法产品设计过程是创造性劳动的过程产品的设计应按科学程序进行一般包括课题调研、拟定设计方案、总体设计、零部件设计、技术资料整理、产品试制、改进设计等过程一个产品进过多次改进才能完善和成熟第二提高了综合应用各门知识的能力以前课程设计接触课程知识比较窄而且时间有限即使发现了问题也不能及时改进借用这次机会再次把专业知识做了系统的了解特别是制造工艺和电气方面的知识第三巩固了计算机绘图能力以前所绘制的工程图标注配合公差都标注不完整这次毕业设计不仅提高了自己的作图能力更是培养了自己细致作图的习惯第四提高了收集资料和查阅能力收集资料是做毕业设计的前期准备工作资料是否全面、可靠关系到整个毕业设计的进程查阅手册是设计过程中随时要做的事情只有广泛收集有用的资料才能设计出比较好的产品第五明确了设计必须与产品生产实际相结合产品才有生命力因此在设计过程中一定下企业调查要虚心听取老师和工程技术售货员的意见不断发行设计完善设计第六培养了严谨的科学作风科学工作来不得半点虚假在设计过程中每个结构、零件、材料、尺寸、公差都反映在图纸上每一个错误都会造成经济损失因此在设计过程中必须要有高度的责任心要有严肃认真的工作态度总之对我们每个学生来说经过这次毕业设计为今后从事生产第一线的技术发行工作、技术管理工作有非常大的帮助参考文献[1] 濮良贵纪名刚.机械设计(第八版).北京:高等教育出版社2005[2] 尔桂花窦日轩.运动控制系统[M].北京:清华大学出版社2002[3] 邓星钟.机电传动控制(第四版)[M] .武汉:华中科技大学出版社2006[4] 全永昕施高义.摩擦磨损原理.杭州:浙江大学出版社1988[5] 玄兆燕朱洪俊杨秀萍.机械工程控制基础.北京:电子工业出版社2006[6] 徐邦荃李浚源詹琼华.直流调速系统与交流调速系统[M] .武汉:华中理工大学出版社2000[7] 王步瀛.机械零件强度计算的理论和方法.北京:高等教育出版社1986[8] 周开勤.机械零件手册.北京:高等教育出版社1994[9] 徐灏.机械设计手册.北京:机械工业出版社1991[10] 孙维连魏凤兰.工程材料.北京:中国农业大学出版社2006[11] 范钦珊王琪.工程力学.北京:高等教育出版社2002[12] RotowaN.AShadomyH.J& ShadomyS. In vitro activities of polyene and imidazole antifungal agents against unusual opportunistic fungal pathogens. Mycoses(1990) 33[13] k. lange. Handbook of Metal FormingMcGraw Hill Book Company1985.[14] 谢铁邦李柱.互换性与技术测量.武汉:武汉理工大学出版社[15] 熊良山严晓光张福润.机械制造技术基础.武汉:华中科技大学出版社2007[16] 顾京.数控机床加工程序编制第三版.北京:机械工业出版社2006[17] 陈宏均.实用机械加工手册.北京:机械工业出版社1997附录相关工程图????????I20人生最大的幸福,是发现自己爱的人正好也爱着自己。
毕业设计论文-路面冰雪除雪机设计
┊
雪设备的选取上也不尽相同,因此要开发出大型、小型的各种除冰雪机械,以满足
┊
不同地区和工况的除冰雪要求。同时要开发出效率高的机械,避免除雪作业造成路
┊
面交通拥挤。例如,东北有些城市规定:对于市区内主干道,雪停止24H后需运出城
┊ ┊
市外。
┊
(4) 加强行业间的技术交流与合作。走共同研发之路。
┊
各个厂家根据自己的实际情况开发出的产品各有优缺点,为了加快除冰雪机械
共 64 页 第 4 页
针模拟等。并要求用计算机软件对重要部件进行详细的运动学和动力学分析。设计
┊
相关的软件。
┊
通过这次设计,要不仅温习好大学四年所学的大不分的理论知识,还要培养工
┊ ┊
程实际应用的能力,锻炼实际的动手和全局的驾御能力。对装载机和除雪机械有更
┊
深的认识,加强在此方面的设计能力。
┊
┊ 3 本课题研究内容、研究方法及技术路线
设计资料和最新进展------消化、吸收个方面的技术资料,并加以整理和创新-----技术设计和整机设计。
共 64 页 第 5 页
4 本课题实现的现有条件
┊
国内外关于ZL40装载机的数据和文献资料的搜集较为便利。在理论上和方法上
┊ ┊
具有很强的借鉴意义。指导老师李萌老师对我国这方面的情况很了解,是这方面的
┊
成V形。
┊ 订
3)变角度犁------指犁的排雪方向和行进角度可以改变的除雪机械
┊
4)复合犁------又叫铰接雪犁,采用两翼结构,中间垂直铰链可以自由改变形
┊
状,形成单向犁、V型犁、变角度犁等犁形。
┊
比较典型的产品有:徐州装载机长的专利产品------调压自动越障式除雪装置。
高压线除冰机器人设计
福州大学本科毕业设计(论文)开题报告题目轻量化高速过障超高压巡线除冰机器人设计院、系机械工程及自动化专业机械设计制造及其自动化学生姓名杨祥学号*********指导教师聂晓根2013年10 月28 日国内外研究现状、发展动态;查阅的主要文献通过这个课题的研究,能通过一种机械设备,较高效率的替代工作人员预防和除去因雨雪冰冻引起的线缆冰冻灾害,减轻工作人员的负担,保障电力设施的正常运行,降低电力公司的损失,保障人民生活的正常进行。
如今一些国家也在研究线缆除冰问题,不少国家在此领域也有不少成就,线缆除冰技术关系到人们生活中的各个方面,除了电力公司设备设施,工作人员的安全外,还关系到交通运输,生活用电等。
各种除冰技术及除冰方案也有所不同,目前国内外的除冰技术有30余种,常见的就有热力融冰法、机械除冰法、自然被动法和其他方法。
热力融冰法[1]就是利用电阻焦耳效应发热来融化线缆上的覆冰,具体操作方法为当供电线缆上的冰层达到一定厚度时,先停止供电,断开供电导线与两端设备的联接,在线路的一段用临时导线将结冰的供电导线联通,而在另一端接上除冰用的临时电源和滑动变阻器调节电流的大小,使供电导线的温度保持在一定的范围内。
已有的机械除冰法也有各种各样的机构形式:文献[架空高压输电线除冰机器人设计] [2]给出了一种由曲柄滑块机构组成,滑块沿轴线方向高速往复滑动,冲击头与滑块固接,带动冲击头敲打覆冰。
其冲击头构件零件图如图1所示:图1 敲打式除冰冲击头这种机构除冰方式可以用于不同厚度形状的覆冰,但由于覆冰在低温下具有粘性,冲击头破冰后,可能在电线上粘有一层薄冰层,可能会使得破冰不够彻底,且影响除冰效率。
文献[高压输电线上除冰机器人的系统设计] [3]提出了一种压轮推进方式除冰机构,该机器人除冰刀具如图2所示:图2 压轮推进式机器人刀具示意图该设计机体上的两个固定压轮骑挂在输电线上保持机体的平衡,机体的重心位于输电线下方,另两个动力压轮分别与两个固定压轮配合,当推动动压轮时, 动压轮向上抬升, 与固定压轮配合从上下夹紧输电线, 依靠压轮与输电线的摩擦获得前进的动力,机体前部的除冰机构呈圆柱形, 分为上下两个。
高速过障超高压巡线除冰机器人设计
XX大学毕业设计(论文)超高压巡线除冰机器人所在学院专业班级姓名学号指导老师年月日诚信承诺我谨在此承诺:本人所写的毕业设计(论文)《超高压巡线除冰机器人》均系本人独立完成,没有抄袭行为,凡涉及其他作者的观点和材料,均作了注释,若有不实,后果由本人承担。
承诺人(签名):年月日摘要Abstract目录摘要 (III)Abstract (III)目录 ...................................................................................................................................... I V 第1章绪论 (1)1.1 课题研究意义 (1)1.2 除冰机器人研究现状 (1)1.3除冰设备发展趋势 (3)1.4 课题要求 (4)第2章超高压巡线除冰机器人总体方案设计 (6)2.1 工作原理 (6)2.2驱动方式选择 (6)2.3 传动方式选择 (7)2.4 行走方式选择 (7)2.5 除冰方式选择 (7)第3章绕线压紧传动机构设计 (9)3.1绕线电机的选择 (9)3.2 蜗杆传动设计计算 (9)3.2.1 选择蜗杆、蜗轮材料 (9)3.2.2 确定蜗杆头数Z1及蜗轮齿数Z2 (10)3.2.3 确定蜗杆蜗轮中心距a (10)3.2.4 蜗杆传动几何参数设计 (11)3.2.5 环面蜗轮蜗杆校核计算 (14)3.3 轴的设计 (15)3.3.1 轴的材料选择 (15)3.3.2 轴的结构设计 (16)3.3.3 轴承校核 (18)第4章机器人行走跨越障碍机构设计 (20)第5章其它机构设计 (24)4.1铣刀机构 (24)蜗轮蜗杆部的电机计算 (26)第6章数控硬件电路设计 (29)6.1硬件电路设计 (29)6.1.1 数控系统的硬件结构 (29)6.1.2 数控系统硬件电路的功能 (30)6.2关于各线路元件之间线路连接 (30)6.3关于电路原理图的一些说明 (31)总结与展望 (34)参考文献 (35)第1章绪论1.1 课题研究意义输电线路覆冰会经常造成线路跳闸、断线、倒杆、通信中断等线路事故,严重影响了电网系统的安全运行,对国家经济造成了巨大损失。
毕业设计(论文) 轨道破冰除雪车设计
图书分类号:密级:毕业设计(论文)轨道破冰除雪车设计The Design of Rail Ice Snow Remover学生姓名班级学院名称专业名称指导教师XXX学位论文原创性声明本人郑重声明:所呈交的学位论文,是本人在导师的指导下,独立进行研究工作所取得的成果。
除文中已经注明引用或参考的内容外,本论文不含任何其他个人或集体已经发表或撰写过的作品或成果。
对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标注。
本人完全意识到本声明的法律结果由本人承担。
论文作者签名:日期:年月日XXX学位论文版权协议书本人完全了解XXX关于收集、保存、使用学位论文的规定,即:本校学生在学习期间所完成的学位论文的知识产权归XXX所拥有。
XXX有权保留并向国家有关部门或机构送交学位论文的纸本复印件和电子文档拷贝,允许论文被查阅和借阅。
XXX可以公布学位论文的全部或部分内容,可以将本学位论文的全部或部分内容提交至各类数据库进行发布和检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。
论文作者签名:导师签名:日期:年月日日期:年月日摘要在极端严寒的天气下,火车、动车和高铁的行车安全会受到来自依附在铁路轨道上的冰雪的严重影响,特别严重的时候会危及到乘客的生命安全。
所以,在列车出发之前,利用轨道破冰除雪车清除轨道上的冰雪就显得极为重要。
除雪技术发展到今天,人们已经总结了好几种主流的除雪方法,但最主要的还是三种,分别为:用机械方法去除冰雪、用化学方法去除冰雪、用综合方法去除冰雪。
本设计以采煤车采煤原理为基础,加入节齿、螺旋叶片配合挡板机构,不仅能够除冰雪,而且能够将冰雪输送到道路的两侧,使除雪达到真正意义上的一次清障。
市场中已有的除雪车,一般功耗都相对较大,效率偏低,并不符合我国冬季除雪的实际国情,本设计中的轨道除雪破冰车功耗低,效率高。
既能瞒住我国北方冬季破冰除雪的实际需求,又能提高经济和民生效益,一举两得。
电线除冰机器人机构分析与设计
当前全球气候变化异常,冻雨天气也是时常有可能发生。
由于建造的有些高压输电设施在设计时并没有考虑严重恶劣天气的影响,不能保证有足够的强度,因此,利用电线除冰机器人除去附着的冰块,来弥补输电设施的强度不足问题,是一种可行的方法。
1.功能分析机器人的总功能由以下几个功能单元组成:(1)能在架空高压线上以期望的速度平稳爬行;根据实际线路的要求,在线行走速度为1m/s 。
(2)能除去附着在电线上的冰块,行走一次至少除去一半以上的附冰。
(3)能够跨越高压线路上的防震锤、线夹、绝缘子、线塔和跳线等障碍。
(4)具有一定的爬坡能力;根据输电线路的实际情况,其最大坡度出现在山谷到山顶两塔杆之间,坡度为55°。
但是由于杆塔附近跳线与耐张线夹之间角度要大于此值,因此确定机器人的最大爬坡角度为75°。
(5)在故障情况下有可靠的自保安措施,防止机器人摔落。
提供足够的空间安装携带电源等。
机器人功能目标的约束条件为:(1)外形:机器人的外形尺寸不得大于500mm *1000mm *2000mm 。
(2)运动:要求机器人在输电线路行走时要快速、稳定、安全、可靠。
(3)重量:根据线路承载的要求,机器人重量越小越好,规定重量≤50kg 。
(4)机器人承载重量≥7kg ,主要是能够携带电源等。
2.功能原理设计在上述机器人的功能目标中,在线行走、除冰和越障是电线除冰机器人机构设计的关键功能。
由于机器人在行走、除冰和越障时既要保证机器人姿态平稳,又要保持与其它导线和杆塔金属部件及拉线的安全间距,并且还要容易控制。
2.1行走功能机器人的在线行走可以考虑用轮子压着钢索前行,这跟地面行走类似,只不过地面行走时只需要一个轮子靠重力压住地面即可,而在线行走则需要一对轮子在同一个地方沿相反的方向同时压住钢索才能前进。
为保持平衡,机器人重心应该在钢索下面,起到圆周定向的功能。
也可以从仿生的观点出发,模仿人在钢丝行走的方式,可采用机器人主体悬挂在钢索上,用机械手交替握住钢索前行。
机械制造及自动化专业毕业论文--除雪机的设计
1 本设计方案的总体概述1.1机构的总体设计的任务及重要性结构的总体设计的任务是将原理方案设计结构化,即把一维或者二维的原理方案图转化为三维的可制造的形体过程,也可以说是从为了完成总系统功能而进行的初步总体布置开始到最佳装配图(结构设计)的最终完善及审核通过为止。
结构总体设计工作包括两个方面,即“质”的设计和“量”的设计。
所谓“质”的设计是指“定形”设计,有系统的定形和零部件的定形。
这部分工作对产品的质量有决定性意义。
“量”的设计则是指选择材料,确定尺寸和零部件进一步详细设计等,此部分设计所涉及到的知识在《机械设计》、《材料力学》等教材中已学过。
由此看来,结构的总体设计阶段的工作量是相当大的,同时它的工作质量对满足功能要求,保证产品质量和可靠性,降低产品的成本等都起者十分重要的作用1.2机构的总体设计原则机械系统总体设计是产品设计的关键,它对产品的技术性能,经济指标和外观造型均具有决定性的意义。
明确,简单,安全可靠是结构总体设计阶段必须遵守的三项基本原则。
由于这三项基本原则的共同目标都是为了保证实现总系统(产品)的预期功能,降低成本及保障人和环境安全的,所以,在整个设计阶段应将这三项基本原则贯彻到底。
(1)明确原则这里主要包括以下三个方面:①功能明确所选择的结构应能明确无误地、可靠地实现预期的功能。
对于可实现的功能来说,要做到既不疏漏又不冗余。
②工作情况明确被设计的产品(系统)所处的工作状况必须明确。
因为结构和零部件的材料、形状、尺寸、磨损及腐蚀是根据其工况来确定。
若设计时缺少准确的使用工况说明,且不得不做出一些假设的话,应随时检查有关假设的正确性。
③结构的工作原理明确设计结构时所依据的工作原理必须明确,从而才能可靠地实现所预期的功能要求。
(2)简单原则简单原则是指要在满足总功能的前提下,尽量使整机、部件、零件的结构简单,且数目少;同时还要要求操作与监控简便;制造与测量容易、快速、准确;安装与调试简易而快捷。
机械式输电线除冰机设计
优秀设计摘要机械式输电线除冰技术是利用传统的工具通过机构运动方式达到输电线除冰的目的。
由于机械式输电线除冰技术除冰效率高,操作简单,因此受到很多国家的重视,在国内也引起了极高的重视,尤其是各大院校和科研院所。
本文从输电线覆冰原理及其危害综合说明了输电线覆冰对人们生产生活的影响,提出了一种新的输电线除冰解决方案。
研发一款新式输电线除冰机。
本输电线除冰机主要由4部分组成,行走部分和除冰部分。
行走部分主要通过齿轮传动机构实现,除冰部分通过对滚刀具实现除冰。
关键词:输电线除冰机械式覆冰目录摘要 (I)第1章绪论 (1)1.1输电线覆冰概况 (1)1.2输电线覆冰危害及机理 (3)1.3国内外相关除冰设备及技术的特点、发展趋势 (4)1.4除冰机研究的内容和意义 (4)第2章方案设计 (6)2.1 工作原理 (6)2.2 机构的设计方案 (6)2.3 主体结构设计 (10)第3章结构设计 (12)3.1 传动零件的设计 (12)3.1.1 齿轮机构设计 (12)3.1.2 轴的设计 (17)3.1.3 轴承校核 (20)3.2 除冰机构的设计 (23)3.2.1 除冰方式选择 (23)3.2.2刀架设计 (25)3.2.3 除冰机构电机选择 (25)3.3 整机三维装配图 (26)第4章功能及创新点 (29)总结 (30)参考文献 (31)致谢 (32)第1章绪论1.1输电线覆冰概况输电线路因受结冰危害通常容易引起严重的断线、杆塔倒塌、大面积停电、限电等事故。
对电力系统的安全运行造成了严重威胁,也一直是电力系统研究中急待解决的难点问题。
据不完全统计,自上世纪50年代以来,我国输电线路便不断遭受覆冰危害。
2003年,由覆冰引起的110~500kV输电线路跳闸79次,占总事故的3127%,其中500kV线路跳闸13次;由于覆冰引起110~500kV线路非计划停运47次,占总事故的41。
24% 。
2004年12月至2005年2月,我国华中电网出现大面积冰灾事故,仅湖南省就有700多万人受灾,直接经济损失超过10亿元。
高压线机械除冰车的毕业设计
高压线机械除冰车的毕业设计目录摘要 .................................................................................................. 错误!未定义书签。
Abstract ............................................................................................. 错误!未定义书签。
1 绪论 (1)1.1 课题来源 (1)1.2 课题的目的和意义 (1)1.3 国内外研究现状 (1)1.4 本文的研究内容 (2)2 总体方案设计 (3)2.1 除冰车的整体设计 (3)2.2 本设计所需解决的问题 (4)2.2.1 机械除冰车在高压线上的悬挂方式 (4)2.2.2 传动方式 (4)2.2.3 驱动方式及控制 (4)2.2.4 除冰刀 (5)2.2.5 行走轮与驱动轮 (5)3 机械部分的设计计算 (6)3.1 后轮轴 (6)3.1.1 前提假设 (6)3.1.2 电机的选择 (6)3.1.3 后轮轴系的估算 (6)3.2 前轮轴 (8)3.3 除冰刀及除冰刀轴 (8)3.3.1 方案比较 (8)3.3.2 除冰刀轴的设计 (10)3.4 锁紧机构 (10)3.4.1 方案比较 (10)3.4.2 锁紧轮的选择 (12)3.4.3 锁紧轴系的估算 (12)3.5 调节机构 (13)3.5.1 方案比较 (13)3.5.2 调节结构的工作原理 (15)4 控制部分的设计 .......................................................................... 错误!未定义书签。
5 典型零件的加工工艺 .................................................................. 错误!未定义书签。
模块式高压电线除冰器设计
模块式高压电线除冰器设计【摘要】在分析高压输电线路覆冰的形成机理和覆冰的种类基础上,设计了一种新型的模块化高压电线除冰器。
该除冰器采用模块化设计理念,引入仿生学原理,实现积木式拼接,有效实现越障,并利用机构不同组合搭配完成除冰工作。
该设备具有构造简单,设计巧妙,实用性强等特点,为研制高压电线除冰器提供了一种新的思路,具有一定的应用价值。
【关键词】模块化高压电线除冰器;越障;除冰0 引言高压输电线路覆冰不仅会影响运行日常维护工作,严重时还会导致碰线短路、绝缘子闪络、线路故障停运,甚至交、直流线路大量倒塔和断线引发大面积停电等灾难性事故影响人们的生产、生活[1]。
输电线路覆冰随着风速、气温、水滴大小等条件的不同,主要可分为雨凇、雾凇、雪凇、混合凇、白霜[2]。
对于不同机理、种类的覆冰虽然现在的防冰除冰方法较多,有的已应用于实际线路,并取得了一定的效果,但操作困难,消耗较大,技术不成熟,不能因冰施技等缺点;即效果不高又使高压电线出现二次损伤的可能。
为了保证电力系统的安全可靠,提高高压电线除冰的效果,保护工人的安全,提高除冰方法的简便性和可操作性,开发一种构造简单,设计巧妙,实用性强的新设备去代替或部分代替人工除冰一直是国内、外研究的方向。
因此,通过分析设备所处的环境,所要面对的覆冰情况,操作工人的能力范围,及分析提高设备利用率等方面;研制安全有效的除冰机械设备以代替人工进行高压电线除冰具有较好的应用前景和实用意义。
文章提出的一种模块式高压电线除冰器即通过多方面分析考虑设计的一种安全有效的除冰设备。
1 模块式高压电线除冰器整体方案通过调研分析表明不同天气变化所生成不同冰体结构,存在不同的电线附着能力。
目前,面对不同冰情冰况,除冰设备却在除冰力度、单位除冰效果及对电线的二次伤害等方面制约除冰设备实用化。
针对这种情况设计了一种新型实用的模块化高压电线除冰器,该除冰器由两个除冰模块,两个辅助模块和一种驱动模块组成。
浅析高压输电线路除冰防冻机器人设计
浅析高压输电线路除冰防冻机器人设计摘要 :高压输电线路除冰防冻机器人它是通过分析高压输电线路巡检工作的特点与高压输电线路巡检机器人的发展现状及趋势相结合的一种新型高压线路除冰技术,本文主要介绍除冰防冻机器人的功能结构以及设计方法,实现机器人完成高压输电线路覆冰去除,解决电力发展中的障碍性问题,为我国的电力发展提供更好的保障。
关键词:高压输电线路;除冰机器人引言随着我国的科学技术飞速进步,各项各业的先进科技为我国的经济发展提供了很大帮助。
经济的快速发展,电力工程的大力发展,超高容量的输电线路建设越来越多,而电线线路的路径也越来越复杂,大多为地形复杂,环境恶劣的地域,这为输电线路后期的维护工作带了很多的困难,并且我国的南北地域差异较大,南方大部分多为山区,这也导致在严冬时期我国的这些地区出现架空输电线路覆冰,给架空输电运输带来一定的损坏,更严重的造成电网结构破坏,安全运行严重受到威胁。
也正是由于环境恶劣导致线路维修人员不能顺利的工作,通常情况下维护人员只能通过使用绝缘棒去清除电线上的覆冰,并且这样的方式还有很大的危险性。
根据国外数据表明,一些国家的地理情况与我国的情况类似,为了保证电力系统运行的可靠性,提高高压输电线路的除冰效率,开发出一种可以替代人工作业的除冰设备,而这套设备也是我国着重研究的热点。
因此,加强研制安全有效的除冰机械设备对我国的电力发展有着重要意义。
1 浅析高压输电线路除冰机器人的基本概念机器人它是一个较为复杂的机电一体化系统,通过应用先进的计算机技术,将机械结构,通信,自动控制,捕捉等多项技术领域进行融合,但机械结构是整个设备的系统基础,也是目前机器人制造的最大障碍。
基于这种情况,科技人员研发出了一种新型实用的高压输电线路除冰机器人,并且具有以下几点功能;其一能够在高压输电线路上以预想的速度进行稳定攀爬;其二整个机械结构具有一定的爬坡能力;其三能够很好的跨越高压输电线路上的线夹,绝缘子等相关障碍物体;其四能够有效的去除高压输电线上覆盖的冰雪。
高压电线除冰装置设计
高压电线除冰装置设计作者:林土淦刘学军刘存香来源:《海峡科技与产业》2016年第11期摘要:输电线路遭遇冰雪灾害时,将导致电线结冰现象的出现,这给用电安全和人民群众的生产生活造成极大危害。
经过充分调研,研发了一套高压电线除冰装置,该装置能够在遥控器的控制下,对输电线路进行快速除冰工作,有效避免人工除冰时危险性高、工作效率低、劳动强度大等缺点。
该装置的输电线路行走机构、除冰机构结合无线控制模块,能够完成在电线上的前进(行驶)、停止、后退等动作,并且进行有效的除冰作业。
该装置所安装的工作状态指示灯能够清楚明了地显示其当前运行情况,降低故障发生率,提高其使用寿命。
本高压电线除冰装置具有结构简单、成本低廉、性价比高等优点。
经反复试验证明,所研发的装置行走稳定,性能可靠,能够高效率地完成高压输电线上的除冰任务,并具有友好人机交互及装置能耗小等优点。
关键词:除冰装置;高压电线;无线遥控控制;钻头除冰;轮式行走装置1 研制背景及意义近几年来,我国数省遭遇了罕见的冰雪灾害。
长时间大范围的低温冰冻天气,导致了多地的电网发生倒塔、断线、舞动、覆冰等多种灾害。
由于湿度、温度与覆冰形成的最佳气象条件吻合,输电线路出现大范围严重覆冰。
冰灾造成了国家电网财产损失惨重,电网灾后恢复改造还需要投入大额资金。
此外,在输电线路上人工除冰危险性高。
由此可见,如何破除输电线路覆冰成为一个亟待解决的很有实际意义的问题。
目前,人们研究并设计了多种装置用于电线除冰,大致包括这几个模块:行走模块、除冰模块和控制模块。
在除冰模块中,多数采用了旋转圆形冰刀切割冰块,犁状式机械爪子等,也有采用热源融化冰雪等方式。
用冰刀切割冰块和用犁状爪子清除碎冰并不能有效的去处电线上的覆冰,还残留有很多冰块包裹着电线;使用热源融冰时消耗的电能比较大,且时间长;用锤子敲打除冰时,若遇到较厚覆冰时可能会敲打不动。
结合以上除冰装置存在问题,研制了一款性价比高的除冰装置。
高压线路除冰机械二
随着科技的发展,高压线路除 冰机械成为了解决这一问题的 有效手段。
目的和意义
目的
研究高压线路除冰机械二,以提 高除冰效率和安全性。
意义
保障电力供应和电网安全,降低 因冰冻灾害造成的经济损失和社 会影响。
02
高压线路除冰机械的种类和特点
机械除冰
总结词
效率高、成本低、对线路有损伤。
详细描述
机械除冰通常适用于较短的线路或特定区域的除冰工作。它可以快速有效地清 除线路上的冰层,但使用过程中可能会对线路造成一定程度的磨损或破坏,需 要定期维护和检修。
04
高压线路除冰机械的未来发展趋势和
挑战
技术创新和改进
01
02
03
高效除冰技术
研发更高效、快速的除冰 技术,提高除冰效率,减 少停电时间。
智能化控制
利用物联网、大数据和人 工智能技术,实现高压线 路除冰机械的智能化控制, 提高自动化水平。
新型材料应用
探索和应用新型材料,提 高除冰机械的耐磨、耐腐 蚀和耐高温性能,延长使 用寿命。
自然除冰
总结词
无损伤、效果不稳定、受自然条件影响大。
详细描述
自然除冰适用于较长线路的除冰工作。利用自然条件如风、雪等,使线路上的冰自然脱落或被吹离。 这种方法对线路无损伤,但效果受自然条件影响较大,稳定性较差。在某些情况下,自然除冰可能无 法完全清除线路上的冰层,需要结合其他方法进行除冰。
03
高压线路除冰机械的应用场景和案例
分析
山区高压线路除冰
山区高压线路容易受到冰雪天气的影响,导致线路冰冻、断线等问题,影响电力供 应和安全。
高压线路除冰机械在山区高压线路除冰中发挥了重要作用,通过机械除冰的方式, 快速、有效地清除线路上的冰雪,保障电力供应和安全。
除雪车的设计_毕业设计
除雪车的设计目录摘要 (1)关键词 (1)Abstract (1)Key words (1)引言 (2)1 除雪车的概述 (2)1.1 除雪车的技术概况 (2)1.2课题背景 (3)1.3除雪车的发展历史 (3)1.3.1目前除雪工作现状 (3)1.3.2除雪车的发展趋势 (4)1.4除雪车的研究目的和研究意义 (4)1.5除雪车的分类与特点 (4)1.6 本章小结 (5)2除雪车的结构设计 (5)2.1浮雪铲的设计 (5)2.1.1 相关概念及名词解释 (5)2.1.2 浮雪铲铲板曲面结构参数选择 (6)2.1.3 雪铲的铲板空间形状选择 (6)2.1.4 雪铲铲板切削刃参数选择 (7)2.1.5 雪铲材料 (7)2.2 破冰扫雪装置的设计 (8)2.2.1 破冰扫雪装置的概述 (8)2.2.2 齿轮的设计 (8)2.2.3 其他装置的设计 (9)2.3本章小结 (10)3 除雪车弹性避让装置 (10)3.1 概述 (10)3.2 避让装置的选择 (11)3.3 圆柱螺旋拉伸弹簧的设计 (11)3.4 本章小结 (11)4 智能控制模块 (12)4.1 驱动电机模块的设计 (12)4.2 驱动舵机模块的设计 (13)4.3 控制舵机的程序 (14)4.4辅助装置模块 (14)4.5本章小结 (15)5结论 (16)参考文献 (17)附录 (17)致谢 (20)除雪车的设计机械电子工程专业学生于涛指导教师杨桂林摘要:本设计是以ST89C51单片机控制电机以及舵机来实现快速破冰除雪。
先以浮雪铲去除上层浮雪、积雪,利用独有的齿轮切割将冰雪分割成小块,对已破碎和残留的冰雪利用毛刷将小块冰雪清扫出路面工作区。
对为了防止融化后的水再次结冰,在清扫完碎冰后,采用大功率多级离心式鼓风机将路面的这些少量冰雪吹到路边。
并且使用了避让装置,减少对除雪车和路面造成的损伤,还利用了太阳能电池给除雪车提供动力,减少资源的使用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
毕业设计(论文)题目:高压线机械除冰车的设计姓名:专业:机械设计与制造学院:学习形式:助学单位:指导教师:年月毕业设计(论文)说明书题目高压线机械除冰车的设计院别:专业:机械设计与制造班级:设计人:指导教师:毕业设计(论文)任务书一、题目:高压线机械除冰车的设计二、基础数据除冰车必须能够除去线径mm 20左右的高压线上包裹的直径为mm 60以上的冰柱,并保证其悬挂在高压线上除冰时的速度达到700米/小时,且除冰刀能够达到min /300r 以上的转速。
为了实现除冰车的慢速运行,本设计选用表3-2中的02pattman 电动机通过链传动带动后轮行走。
电动机上的链轮齿数117Z =,后轮轴上的链轮齿数217Z =,链传动的传动效率一般取98.0~95.0=η(本设计取95.0=η),选用pattman01电动机通过链传动带动除冰刀高速旋转。
电动机上的链轮齿数130Z =,后轮轴上的链轮齿数217Z =链传动的传动效率取95.0=η型号 工作电压()V 工作功率()W 工作转速()m in r01Pattman 24 4.38 30002Pattman 24 4.38 100三、内容要求:1. 说明部分:基于已有方案的弊端,本论文提出了并实际加工一种新的适用于高压线除冰设备——悬挂式机械除冰车。
该除冰车最大优势是属于高空破障作业工具,能够克服河流、沟壑等交通工具难以逾越的障碍,采用挤压、震动、切削的三重除冰效果,真正起到预防灾害的目的。
该除冰车的制造成本低、体积小、可靠性高,具有很广阔的市场前景。
论文主要包括以下几个方面的内容:(1)除冰车整体方案的设计及所需解决的技术问题;(2)除冰车机械部分的设计计算,包括前、后轮轴、除冰刀与除冰刀轴的计算,锁紧机构、调节机构的设计;(3)控制部分的设计;(4)典型零件的加工工艺;(5)除冰车的创新点、实物及试验照片展示。
2. 计算部分:后轮轴的转速:121217100100min17Zn n rZ=⨯=⨯=3233min236.48101128100Pd A mmn-⨯==≈)(dh1.0~07.0=3423280.289.6d h d mm--=⨯+=⨯+=3. 绘图部分:四、发给日期:年月日五、要求完成日期:年月日指导教师:年月日高压线机械除冰车的设计摘要近年来,我国南方部分地区频繁发生雨雪冰冻灾害,导致输电线表面结冰、重力增大,高压输电线路大面积受损。
为了避免高压线被压坏,保证电力输送的正常进行,就需要将高压线覆冰及时消除。
在通过分析现有除冰技术各种利弊后,提出本文的机械除冰车方案。
本文的目的是设计并制造一种新型的高压线机械除冰车。
论文首先提出了除冰车的整体方案设计及所需解决的主要问题,包括悬挂问题、传动及驱动方式、除冰刀、行走轮和驱动轮的设计。
然后进行了包括轴和除冰刀的设计计算、锁紧机构和调节机构设计的机械部分设计计算以及控制部分的设计,并给出了轴和除冰刀的加工工艺。
论文最后总结了本设计的创新点及特点,并展示了部分实物及试验照片。
本文设计的高压线除冰车不仅除冰方式独特、除冰效率高,而且其自动调节的结构可以减少除冰车在除冰时对高压线的损伤,其体积小,方便人工携带,操作简单,具有广阔的应用前景。
关键词:高压线机械除冰车机械设计控制设计AbstractIn recent years, snow and ice storms occur frequently in parts of southern China. transmission lines were covered by heavy ice and a large damage was caused . In order to avoid transmission lines being crushed and ensure the normal power transmission, the heavy ice covered in high-voltage must be eliminated in time. So we propose a mechanical de-icing Vehicle in this paper through analyzing variety of pros and cons of the existing de-icing technology.The purpose of this paper is to design an manufacture a new type of mechanical de-icing vehicle for high-voltage lines. First we proposed a de-icing vehicle’s overall design and major problems needed to be solved, including the issue of suspension, transmission and drive, in addition to the design of ice skates, running wheels and driving wheels. Then we design and calculate the mechanical parts of the de-icing Vehicle, include the axis and ice skate’s, locking and adjusting mechanism’s design, and control parts. Then we gave the processing of axis and ice skate. In the end of the paper, we concludes innovations and show some physical and test photos.The de-icing machinery for high-voltage proposed in this paper not only has unique de-icing way,high de-icing efficiency,but also its the automatic adjustment of the structure can reduce the injury to high-voltage lines during the de-icing,its small size,convenient artificially carry,has wide application prospects.Key words:De-icing machinery for high-voltage lines mechanical design control design目录摘要 (I)Abstract (II)1 绪论 (1)1.1 课题来源 (1)1.2 课题的目的和意义 (1)1.3 国内外研究现状 (1)1.4 本文的研究内容 (2)2 总体方案设计 (3)2.1 除冰车的整体设计 (3)2.2 本设计所需解决的问题 (4)2.2.1 机械除冰车在高压线上的悬挂方式 (4)2.2.2 传动方式 (4)2.2.3 驱动方式及控制 (4)2.2.4 除冰刀 (5)2.2.5 行走轮与驱动轮 (5)3 机械部分的设计计算 (6)3.1 后轮轴 (6)3.1.1 前提假设 (6)3.1.2 电机的选择 (6)3.1.3 后轮轴系的估算 (6)3.2 前轮轴 (8)3.3 除冰刀及除冰刀轴 (8)3.3.1 方案比较 (8)3.3.2 除冰刀轴的设计 (10)3.4 锁紧机构 (10)3.4.1 方案比较 (10)3.4.2 锁紧轮的选择 (12)3.4.3 锁紧轴系的估算 (12)3.5 调节机构 (13)3.5.1 方案比较 (13)3.5.2 调节结构的工作原理 (15)4 控制部分的设计 (16)5 典型零件的加工工艺 (19)5.1 轴的加工工艺 (19)5.2 除冰刀的加工工艺 (20)6 本设计的创新点、实物及试验照片 (21)6.1 创新点及实物照片 (21)6.2 其他特点及实物照片 (21)6.3 试验照片 (23)结论 (25)参考文献 (27)附录相关工程图 (28)1绪论1.1 课题来源针对恶劣天气导致高压输电线路结冰的现象,创新性的提出并加工出了一种适用于线径为1015mm的高压线除冰破障机械。
1.2 课题的目的和意义在2007~2008新年之际,我国南方发生了特大雪灾。
由于准备工作的不足,雪灾带来的损失和危害非常严重,人们正常的工作和生活受到极大的影响。
雪灾发生后,许多电力工人为了维护电力输送这条生命线,有些人甚至还献出了自己宝贵的生命。
因此,进行早期冰冻灾害的预防,降低灾害破坏程度的研究是非常有意义的。
1.3 国内外研究现状目前国外一般采用喷火器进行高压线除冰,如图1-1所示。
但是成本很高。
图1-1喷火器融冰针对2008年初发生的低温雨雪冰冻灾害,导致南方电网区域的贵州大部分地区、广西桂北地区、广东粤北地区、云南滇东北地区电网设施遭受到严重破坏,西电东送也受到严重影响。
为提高电网对极端气候、重大自然灾害的抵御能力,南方电网启动了包括“直流融冰装置样机研制”重点攻关项目,如图1-2所示。
图1-2直流融冰装置直流融冰技术先进,不需要很大的负荷,一般只需要1至2万千瓦,而且直流输出电压可调,可在一定范围内针对不同长短的单条线路进行融冰,不再需要进行线路串接,操作比较简单,为线路的融冰工作提供了更为简便的方式。
固定式(可控硅)直流融冰装置是采用引入变电站10千伏电源,通过三绕组整流变压器后,送入12脉波可控硅整流器,经整流后输出3000伏/1400安的直流。
该装置可实现输出电压、电流调节功能,可满足城前岭变电站除220千伏城烟线外的其余110千伏及以上电压等级线路的直流融冰。
但采用直流融冰虽是一种切实可行、经济有效的防冰灾措施,但直流融冰装置存在直流输出电流大、大角度大电流长期运行、已建变电站的接入等多项新的问题。
另外,在全国大学生机械创新大赛中也有关于机械除冰装置的设计。
如陕西理工大学在第四届全国机械创新大赛中提出了一种类似爬杆机器人的除冰设备,通过夹紧机构对冰柱施加强大的夹力将冰柱夹碎,或者通过伸缩机构强大的推力将冰条割断来去除高压线覆冰。
综上所述,目前尚没有采用成本低廉、不需要新增复杂装置、采用挤压、震动、切削的三重方式去除高压线覆冰的小型机械。